RU2468435C2 - Система и способ количественного трехмерного исследования ceus - Google Patents
Система и способ количественного трехмерного исследования ceus Download PDFInfo
- Publication number
- RU2468435C2 RU2468435C2 RU2010123934/08A RU2010123934A RU2468435C2 RU 2468435 C2 RU2468435 C2 RU 2468435C2 RU 2010123934/08 A RU2010123934/08 A RU 2010123934/08A RU 2010123934 A RU2010123934 A RU 2010123934A RU 2468435 C2 RU2468435 C2 RU 2468435C2
- Authority
- RU
- Russia
- Prior art keywords
- image
- tissue
- contrast
- frame
- roi
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 75
- 238000003384 imaging method Methods 0.000 title abstract description 6
- 238000004445 quantitative analysis Methods 0.000 claims abstract description 14
- 238000002604 ultrasonography Methods 0.000 claims description 63
- 238000002607 contrast-enhanced ultrasound Methods 0.000 claims description 42
- 239000000523 sample Substances 0.000 claims description 35
- 238000002560 therapeutic procedure Methods 0.000 claims description 14
- 230000009466 transformation Effects 0.000 claims description 14
- 238000006243 chemical reaction Methods 0.000 claims description 12
- 230000008685 targeting Effects 0.000 claims description 12
- 238000013519 translation Methods 0.000 claims description 12
- 238000012546 transfer Methods 0.000 claims description 9
- 239000004744 fabric Substances 0.000 claims description 8
- 238000012545 processing Methods 0.000 claims description 8
- 230000010412 perfusion Effects 0.000 claims description 7
- 238000002405 diagnostic procedure Methods 0.000 claims description 2
- 238000012731 temporal analysis Methods 0.000 claims description 2
- 238000000700 time series analysis Methods 0.000 claims description 2
- 230000000694 effects Effects 0.000 abstract description 2
- 238000005516 engineering process Methods 0.000 abstract 1
- 230000007717 exclusion Effects 0.000 abstract 1
- 238000004519 manufacturing process Methods 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 210000001519 tissue Anatomy 0.000 description 122
- 239000002872 contrast media Substances 0.000 description 10
- 230000008901 benefit Effects 0.000 description 9
- 230000014616 translation Effects 0.000 description 9
- 238000001574 biopsy Methods 0.000 description 8
- 238000011160 research Methods 0.000 description 8
- 230000001052 transient effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 238000011002 quantification Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 239000003795 chemical substances by application Substances 0.000 description 3
- 238000002347 injection Methods 0.000 description 3
- 239000007924 injection Substances 0.000 description 3
- 230000029058 respiratory gaseous exchange Effects 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 238000010521 absorption reaction Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 239000005441 aurora Substances 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000012113 quantitative test Methods 0.000 description 2
- 230000000241 respiratory effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 206010027476 Metastases Diseases 0.000 description 1
- 238000002679 ablation Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000003556 assay Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 239000002961 echo contrast media Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000010253 intravenous injection Methods 0.000 description 1
- 210000005228 liver tissue Anatomy 0.000 description 1
- 230000003211 malignant effect Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- QYSGYZVSCZSLHT-UHFFFAOYSA-N octafluoropropane Chemical compound FC(F)(F)C(F)(F)C(F)(F)F QYSGYZVSCZSLHT-UHFFFAOYSA-N 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 230000002269 spontaneous effect Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4254—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors mounted on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/481—Diagnostic techniques involving the use of contrast agent, e.g. microbubbles introduced into the bloodstream
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/38—Registration of image sequences
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10132—Ultrasound image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Hematology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Изобретение относится к ультразвуковым системам. Техническим результатом является расширение функциональных возможностей за счет исключения ручной идентификации желаемых ROI в ультразвуковом кадре. Способ количественного трехмерного ультразвукового исследования с контрастным усилением включает в себя получение начальной пары ультразвуковых контрастных изображений и изображений тканей для организма. Устанавливают участок, представляющий интерес (ROI), или объем, представляющий интерес (VOI), на начальном полученном изображении тканей, которое становится фоновым изображением тканей. Установленный ROI/VOI автоматически совмещается от начального изображения тканей до начального контрастного изображения, оно становится фоновым контрастным изображением. Осуществляют количественный анализ в отношении ROI/VOI фонового контрастного изображения. Способ включает в себя получение следующей пары ультразвукового контрастного изображения и изображения тканей, соответствующей i-й текущей паре контрастного изображения и изображения тканей. 2 н. и 13 з.п. ф-лы, 4 ил.
Description
Настоящая заявка испрашивает приоритет поданной ранее предварительной заявки, озаглавленной "System and method for quantitative 3D CEUS analysis", Jochen Kruecker et al., серийный № 60/987796, поданной 14 ноября 2007 года и переуступленной правообладателю по настоящему изобретению.
Настоящие варианты осуществления, в целом, относятся к ультразвуковым системам, а более конкретно, к способу и устройству для количественного трехмерного ультразвукового исследования с контрастным усилением.
Количественный анализ локализованных переходных эффектов при получении ультразвуковых изображений с контрастным усилением (CEUS) в настоящее время является сложным и трудоемким из-за дыхательного (и иного) движения тканей, требуя ручной идентификации желаемого участка, представляющего интерес (ROI), или объема, представляющего интерес (VOI), в каждом индивидуальном ультразвуковом кадре.
Получение ультразвуковых изображений с контрастным усилением (CEUS) относится к получению ультразвуковых изображений после внутривенной инъекции агента для получения ультразвукового контраста (такого как Definity®, Bristol-Myers Squibb). В современных ультразвуковых сканерах используют специальные режимы получения изображения для получения преимущества от нелинейного акустического отклика контрастных веществ, таким образом, на изображении выделяется только ткань с контрастным поглощением. Полученное изображение называется "контрастным изображением" и имеет сильно отличающийся внешний вид по сравнению с неконтрастными изображениями. Можно также получать изображение тканей после инъекции контрастного вещества в режиме оттенков серого цвета. В последнем случае полученное изображение называется "изображение тканей" и выглядит подобно изображениям в оттенках серого цвета, полученным без инъекции контрастного вещества, показывая только небольшое усиление на участках поглощения контрастного вещества.
Переходная визуализация контрастного вещества (например, приток/отток) может давать ценную информацию о локальной перфузии тканей, которая может использоваться для дифференциации доброкачественных и злокачественных масс. Однако движение тканей (например, из-за дыхания) делает необходимым ручную идентификацию желаемых ROI в каждом ультразвуковом кадре. Таким образом, исследование имеет тот недостаток, что оно требует большого времени, зависит от пользователя и может осуществляться только ретроспективно, что исключает использование информации переходного CEUS для нацеливания биопсии или терапевтических процедур.
Соответственно, является желательным получение улучшенного способа и системы для преодоления проблем в данной области.
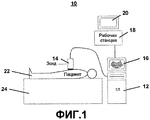
Фиг.1 представляет собой блок-схему системы для количественного исследования CEUS в соответствии с одним из вариантов осуществления настоящего раскрытия;
фиг.2 представляет собой блок-схему системы для количественного исследования CEUS с использованием отслеживания положения в соответствии с другим вариантом осуществления настоящего раскрытия;
фиг.3 представляет собой частичную блок-схему, иллюстрирующую преобразование между различными частями системы для количественного исследования CEUS на фиг.2, в соответствии с вариантами осуществления настоящего раскрытия;
фиг.4 представляет собой блок-схему, иллюстрирующую способ количественного исследования CEUS в соответствии с другим вариантом осуществления настоящего раскрытия.
На фигурах сходные ссылочные номера относятся к сходным элементам. В дополнение к этому, необходимо отметить, что фигуры могут изображаться не в масштабе.
Устройство и способ для получения данных ультразвукового исследования с контрастным усилением (CEUS) используют совмещение по изображению для компенсации движения тканей, автоматически и в реальном времени. Изображение CEUS и соответствующее изображение тканей получаются по существу одновременно и автоматически совмещаются, то есть участок, представляющий интерес (ROI), или объем, представляющий интерес (VOI), определенный на одном изображении, определяет такие же ткани на другом изображении. Изображение тканей не будет изменяться (или будет изменяться только в малой степени) во время введения контрастного вещества и может таким образом использоваться для совмещения текущего изображения с фоновым изображением, на котором идентифицируется ROI или VOI. Ультразвуковой зонд может объединяться с внешним устройством для отслеживания положения с получением системы координат для использования количественной информации CEUS непосредственно для наведения и нацеливания биопсии и локализованной терапии. Настоящее изобретение делает возможным автоматический количественный анализ параметров переходного контрастного изображения. В результате, ручная идентификация ROI или VOI в каждом индивидуальном ультразвуковом кадре, которая является сложной и трудоемкой из-за дыхательного (и другого) движения тканей, но необходимой для современных способов исследования, становится больше не нужной для каждого ультразвукового кадра из ряда кадров.
В соответствии с одним из вариантов осуществления настоящего раскрытия система и способ для количественного исследования CEUS получают данные CEUS таким образом, что движение тканей может компенсироваться автоматически и в реальном времени. Это делает возможным автоматический количественный анализ параметров переходного контрастного изображения. В дополнение к этому, система обеспечивает систему координат, в которой результаты такого количественного анализа могут непосредственно использоваться для нацеливания биопсии или терапевтических процедур.
В соответствии с дополнительными вариантами осуществления настоящего раскрытия система и способ для количественного исследования CEUS (a) автоматически компенсируют движение тканей, делая возможным автоматический анализ ROI или VOI, причем ROI или VOI определяются в одном ультразвуковом кадре сами по себе, отдельный ультразвуковой кадр соответствует фоновому изображению тканей, как будет обсуждаться далее в настоящем документе, и (b) объединяются с системой для нацеливания инвазивной процедуры (например, биопсии) или локализованной терапии для получения информации для нацеливания, основанной на результатах исследования CEUS.
Варианты осуществления настоящего раскрытия устраняют необходимость в ручной и требующей большого времени идентификации ROI/VOI в каждом кадре полученного переходного CEUS и тем самым преодолевают современное ограничение переходного CEUS относительно ретроспективного исследования. При получении данных CEUS переходное воздействие контрастного вещества может проявляться в течение нескольких минут, тем самым легко требуя идентификации более одной тысячи (>1000) ROI/VOI во временном ряду, получаемом при 10 Гц. Варианты осуществления настоящего раскрытия преимущественно решают такую проблему с помощью использования совмещения по изображению, несмотря на то что совмещение на основе переходных изображений CEUS является сложным и неустойчивым из-за низкого содержания информации и изменчивости изображений CEUS от кадра к кадру.
Варианты осуществления настоящего раскрытия с преимуществами преодолевают эту проблему посредством использования одновременного получения изображения CEUS и соответствующего изображения тканей, как обсуждается далее в настоящем документе. В пределах заданного периода времени введения контрастного вещества определенные характеристики изображения тканей не изменяются (или будут изменяться только до незначительной степени) во время введения контрастного вещества и могут таким образом использоваться для совмещения текущего контрастного изображения с фоновым изображением тканей, на котором идентифицируется ROI. В дополнение к этому, поскольку изображения тканей и контрастные изображения получают одновременно или почти одновременно соответствующие изображения тканей и контрастные изображения совмещаются автоматически, то есть ROI, определенный на одном изображении, изображает практически эти же ткани на другом изображении, как будет обсуждаться далее в настоящем документе.
В дополнение к этому, варианты осуществления настоящего раскрытия дополнительно включают объединение ультразвукового зонда с внешним устройством для отслеживания положения. Объединение ультразвукового зонда с внешним устройством для отслеживания положения с преимуществами позволяет компенсировать свободное ручное перемещение зонда во время получения данных CEUS, таким образом дополнительно повышая устойчивость совмещения по изображению и уменьшая размерность пространства поиска (поскольку вызываемое дыханием движение ROI может, как правило, аппроксимироваться только преобразованиями поступательного движения). Кроме того, объединение с внешним устройством для отслеживания положения обеспечивает систему координат для использования количественной информации CEUS непосредственно для наведения и нацеливания инвазивной процедуры (например, биопсии) и/или локализованной терапии.
Обращаясь теперь к чертежам, здесь фиг.1 представляет собой блок-схему системы 10 для количественного исследования CEUS в соответствии с одним из вариантов осуществления настоящего раскрытия. Система 10 содержит ультразвуковой сканер (US) 12, снабженный ультразвуковым зондом и/или соединенный с ним, для получения изображений 14. В одном из вариантов осуществления ультразвуковой сканер 12 содержит, например, ультразвуковой сканер iU22, коммерчески доступный от Philips Medical Systems. Зонд для получения изображений 14 включает в себя любой пригодный для использования зонд для получения трехмерного изображения. В дополнение к этому, ультразвуковой сканер 12 содержит дисплей 16 сканера. Кроме того, ультразвуковой сканер 12 конфигурируется для одновременного получения контрастного изображения и изображения тканей. Ультразвуковой сканер 12 дополнительно конфигурируется для переноса изображений в реальном времени, например, посредством организации поточной передачи данных на внешнюю рабочую станцию 18. Например, перенос изображений в реальном времени может осуществляться с использованием ультразвукового сканера iU22 с программным обеспечением Digital Navigation Link.
Обращаясь опять к фиг.1, здесь рабочая станция 18 содержит дисплей 20 рабочей станции. В дополнение к этому, рабочая станция 18 содержит программное обеспечение, загруженное в ее память, каковое программное обеспечение содержит инструкции, выполняемые процессором рабочей станции, чтобы (i) сохранять получаемые одновременно (и таким образом автоматически совмещающиеся) контрастные изображения и изображения тканей, (ii) сделать возможной ручную идентификацию ROI или VOI на одном полученном изображении тканей, где соответствующие изображения тканей с идентифицированным ROI или VOI впоследствии упоминаются как "фоновое изображение", (iii) совмещать информацию изображения в пределах ROI/VOI на фоновом изображении с последующими изображениями тканей для определения движения ROI/VOI Ti от фонового изображения для i-го изображения тканей, где T представляет собой преобразование, описывающее соответствующие трансляцию и поворот или параметры преобразования более высоких порядков (нежестких), (iv) применять это же преобразование Ti для преобразования фонового ROI/VOI в кадре i-го контрастного изображения, определяя таким образом ROI или VOI для i-го контрастного изображения, обозначаемого далее ROIi (VOIi), и (v) осуществлять количественный анализ содержания изображений в пределах ROIi (VOIi) в i-м контрастном кадре. Кроме того, программное обеспечение может содержать инструкции, исполняемые процессором рабочей станции 18, чтобы (vi) анализировать полные временные ряды количественных результатов от отдельных кадров для определения параметров, которые могут обеспечить диагностическую информацию. Осуществление количественного анализа может включать, но не ограничиваясь этим, вычисление среднего значения и стандартного отклонения яркости и тому подобное, для содержания изображения в ROIi (VOIi) в i-м контрастном кадре. В дополнение к этому, параметры диагностической информации, определяемые из анализа временных рядов количественных результатов, могут включать, но не ограничиваясь этим, константы перфузии тканей и тому подобное.
При работе ультразвуковой сканер 12, зонд 14 и рабочая станция 18 применяются к пациенту 22, имеющему организм, который подвергается воздействию заданной ультразвуковой диагностики и/или соответствующему лечению или медицинской процедуре, где пациент 22 располагается на столе 24 для пациента. Ультразвуковой сканер 12 конфигурируется для получения контрастных изображений и изображений тканей в "параллельном режиме", соответствующем послойному получению контрастных кадров и кадров тканей, и посылает оба полученных изображения на рабочую станцию 18. Программное обеспечение исполняется рабочей станцией 18 для реализации следующего потока операций.
В одном из вариантов осуществления поток операций включает осуществление ручной идентификации VOI в одном полученном изображении тканей, при этом соответствующее изображение тканей становится "фоновым изображением" для целей способа количественного анализа, как обсуждается в настоящем документе. VOI может определяться с помощью сферы, эллипсоида или любой другой определяемой пользователем трехмерной геометрической формы. В одном из вариантов осуществления общий VOI описывается как множество точек на поверхности формы, соединенных линиями с соседними точками и сгруппированных в треугольники, описывающие поверхностные участки формы, так что могут легко определяться "внутреннее пространство" и "внешнее пространство" VOI. Информация изображения внутри и вблизи VOI для фонового изображения тканей хранится как шаблон тканей IVOI base для последующего совмещения по изображению. Соответствующая информация изображения внутри VOI на контрастном изображении IVOI contrast,0 количественно анализируется (например, вычисляют среднюю яркость, стандартное отклонение яркости и тому подобное) для оценки переходного воздействия контраста. Результат (результаты) хранится как множество M признаков pk 0, где k=1...M представляет собой индекс признака и нижний индекс обозначает номер кадра. В этом примере фон представляет собой то, что видно непосредственно перед инъекцией контрастного вещества. Затем пациенту вводят агент для получения контраста.
Для следующих множеств контрастных изображений/изображений тканей (то есть для последующих пар контрастных изображений и изображений тканей) фоновый шаблон тканей IVOI base совмещается с текущим изображением тканей с получением преобразования Ti, описывающего движение шаблона от фонового изображения тканей к i-му кадру изображения тканей в координатах изображений. Преобразование Ti содержит поворот/трансляцию или преобразование более высокого порядка (нежесткое) и может быть вычислено в реальном времени. Такое же преобразование Ti применяют к форме, описывающей VOI, с получением VOIi. Преобразованный VOIi изображает те же ткани на i-м кадре тканей, в то время как VOI определяет фоновое изображение тканей. В дополнение к этому, при условии одновременного (или почти одновременного) получения контрастных изображений и изображений тканей для i-го кадра соответствующие контрастные изображения и изображения тканей автоматически совмещаются друг с другом, и ROI/VOI, определенный на одном изображении, определяет точно такие же ткани на другом изображении. Информация изображения, содержащаяся внутри VOIi i-го контрастного изображения, IVOIi contrast,i, затем анализируется, как обсуждается выше в настоящем документе, с получением набора признаков pk i, k=1...M, для i-го кадра.
Осуществление способа продолжается посредством повторения стадий совмещения и анализа для всех последующих кадров изображений, пока не произойдет прерывания получения данных. Прерывание получения данных может включать в себя, например, прерывание работы системы пользователем или другое прерывание, инициируемое системой. Такое прерывание, как правило, происходит после того, как исчезает контрастное воздействие внутри VOI. В дополнение к этому, множество признаков pk i для всех i кадров теперь может непосредственно использоваться для количественного определения перфузии тканей в выбранном VOI, с использованием соответствующих способов. Например, один из способов количественного определения перфузии тканей для выбранного VOI описан M. Krix, "Quantification of perfusion of liver tissue and metastases using a multivessel model for replenishment kinetics of ultrasound contrast agents", Ultrasound in medicine & biology, vol. 30, pp. 1355-1363, 2004.
Фиг.2 представляет собой блок-схему системы для количественного исследования CEUS с использованием отслеживания положения в соответствии с другим вариантом осуществления настоящего раскрытия. Вариант осуществления по фиг.2 является подобным варианту по фиг.1, со следующими различиями. В варианте осуществления по фиг.2 система 30 усиливается посредством объединения с внешней системой 32 отслеживания положения (TS). Внешняя система 32 отслеживания положения содержит генератор 34 поля слежения, который конфигурируется для получения поля слежения, обозначаемого в целом ссылочным номером 36. Сенсор 38 соединяется с ультразвуковым зондом 14, где отклик для сенсора располагается в диапазоне поля 36 сенсора, положение и ориентация сенсора могут отслеживаться с помощью системы 32 слежения. В одном из вариантов осуществления рабочая станция 18 соединяется с системой 32 слежения и конфигурируется для сообщения информации слежения и/или обеспечения инструкций слежения между рабочей станцией 18 и системой 32 слежения в соответствии с требованиями данного осуществления количественного исследования CEUS. Система 32 слежения может включать в себя любую пригодную для использования систему слежения, например, такую как электромагнитная система "Aurora", Northern Digital Inc., of Waterloo, Canada.
Как описано в настоящем документе, система 30 включает объединение, которое обеспечивает ряд преимуществ. Первое преимущество заключается в том, что система 30 улучшает устойчивость совмещений по изображению в соответствии с вариантами осуществления настоящего раскрытия. Например, самопроизвольное или преднамеренное движение зонда при ручной работе сканера может создавать большие различия в содержании изображений последовательных кадров, тем самым делая сложной оценку соответствующего видимого движения ROI/VOI Ti. Однако использование положения/ориентации зонда 14, как измерено с помощью системы 32 слежения, обеспечивает улучшенную исходную точку для способа совмещения по изображению, позволяя свести ближе друг к другу ROI/VOI на фоновом изображении и кадре на i-м изображении в начале соответствующего процесса совмещения.
Второе преимущество заключается в том, что система 30 уменьшает размерность пространства поиска. То есть движение ROI, вызываемое дыханием, как правило, хорошо аппроксимируется трансляциями (то есть без поворотов). Однако вращательное движение ультразвукового зонда может вводить поворот в видимое перемещение ROI от кадра к кадру. Посредством устранения вращательного компонента с использованием отслеживания зонда совмещение по изображению может быть ограничено до трех (3) степеней свободы (DOF), соответствующих трансляции (x, y, z), вместо шести (6) степеней свободы, соответствующих трансляции (x, y, z) и повороту (θx, θy, θz).
Другое преимущество системы 30 заключается в том, что система 32 слежения обеспечивает систему координат для последующего наведения/нацеливания на цель, идентифицируемую с использованием количественного анализа ROI в соответствии с вариантами осуществления способа количественного исследования CEUS по настоящему описанию. Нацеливание может обеспечиваться посредством слияния ультразвукового изображения в реальном времени с полученным заранее трехмерным изображением (таким как изображения от CT (компьютерной томографии) или MRI (ЯМР-томографии)) и/или посредством пространственного отслеживания инвазивных или хирургических устройств, снабженных миниатюризированными сенсорами для слежения (см., например, ссылку JVIR 2007: Jochen Krücker, Sheng Xu, Neil Glossop, Anand Viswanathan, Jörn Borgert, Heinrich Schulz, and Bradford J. Wood. Electromagnetic tracking for thermal ablation and biopsy guidance: Clinical evaluation of spatial accuracy. JVIR, vol. 18, pp. 1141-1150, 2007).
В дополнение к функциям, обсуждаемым в настоящем документе со ссылкой на систему 10 по фиг.1, в системе 30 по фиг.2, рабочая станция 18 дополнительно содержит программное обеспечение, загруженное в ее память, каковое программное обеспечение содержит инструкции, исполняемые процессором рабочей станции, чтобы: (i) обрабатывать информацию об отслеживании положения от системы слежения (TS) 32 одновременно с потоком изображений от US сканера 12; (ii) сохранять положение Tbase ультразвукового зонда во время получения фонового изображения и для каждого последующего изображения i вычислять разность положений Tbase i между текущим кадром i и фоновым изображением; (iii) использовать Tbase i для определения Ti 0, где Ti 0 соответствует разности положений ROI на i-м кадре по сравнению с фоном в предположении отсутствия движения тканей (то есть видимое движение вводится только посредством движения зонда по отношению к тканям); и (iv) использовать Ti 0 как исходное положение для процесса совмещения по изображению для определения соответствующего движения ROI/VOI Ti в i-м кадре.
В системе 30 варианта осуществления по фиг.2 внешняя система 32 отслеживания положения (TS), такая как электромагнитная система "Aurora" (Northern Digital Inc., Waterloo, Canada), устанавливается за пациентом 22. Сенсор 38 положения (S) с 6 степенями (6DoF) соединен с ультразвуковым зондом 14, и генератор 34 поля слежения позиционируется так, чтобы положение зонда могло отслеживаться с помощью поля 36 слежения. Система 32 слежения может также включать в себя оптическую систему слежения, в которой генератор 34 поля слежения содержит камеру для оптического слежения ультразвукового зонда 14 в поле 36 слежения, соответствующем оптическому полю зрения. Фиг.3 представляет собой частичную блок-схему, иллюстрирующую преобразование между различными частями системы для количественного исследования CEUS по фиг.2, в соответствии с вариантами осуществления настоящего раскрытия. В частности, фиг.3 представляет собой иллюстрацию преобразования между системами координат трехмерного ультразвукового изображения для сенсора слежения, прикрепленного к зонду, и системы слежения. В одном из вариантов осуществления фиг.3 иллюстрирует соотношение преобразований между сенсором положения 6DoF, системой слежения и соответствующим ультразвуковым кадром.
Преобразование Ttracking описывает текущее положение и ориентацию ("положение") сенсора 14 слежения по отношению к системе слежения (32, 34). Другими словами, преобразование Ttracking описывает соотношение между системой координат системы слежения Ctracking и системой координат сенсора слежения Csensor. Преобразование Ttracking обеспечивается системой слежения и передается на рабочую станцию 18 в реальном времени. Преобразование Tcalibration описывает соотношение между системой координат C3DUS трехмерного ультразвукового изображения (то есть координат вокселов) и системой координат Csensor сенсора слежения 38, прикрепленного к зонду 14. Преобразование Tcalibration определяется в одноразовой процедуре калибровки и остается фиксированным для данного сенсора 38 слежения, жестко прикрепленного к ультразвуковому зонду 14.
Информация слежения от сенсора 38 слежения (S) обеспечивает исходную точку для совмещений по изображению следующим образом. Начальный VOI, как показано с помощью ссылочного номера 40 на фиг.3 и как получено с помощью ультразвукового зонда 14, находящегося в фоновом положении 14(0), определяют в координатах вокселов трехмерного ультразвукового изображения (3DUS) на фоновом изображении и соответствующее положение слежения, положение Tbase фонового изображения, сохраняют (например, с помощью системы 32 слежения или в соответствующей памяти рабочей станции 18). Для каждого последующего изображения, получаемого, например, с помощью зонда 14, находящегося в следующем положении 14(i), способ включает в себя вычисление преобразования Ti 0 (то есть видимого движения изображения, вводимого только посредством перемещения зонда по отношению к тканям) с использованием выражения:
Ti 0 =T-1 calibration ·T-1 tracking,i ·Tbase ·Tcalibration,
где Ttracking,i представляет собой положение слежения кадра i-го изображения и где верхний индекс -1 обозначает обращение матрицы.
Теперь Ti 0 может использоваться в качестве исходного положения для способа совмещений по изображению, который будет определять Ti, как определено выше. В дополнение к этому, теперь совмещение по изображению может быть сведено к поиску только по трансляции, поскольку потенциальный вращательный компонент (например, вводимый поворотом зонда) устраняется.
Фиг.4 представляет собой логическую блок-схему, иллюстрирующую способ 50 количественного исследования CEUS в соответствии с другим вариантом осуществления настоящего раскрытия. Способ 50 начинается на стадии 52, которая может содержать любое действие, пригодное для инициирования способа, которое может соответствовать требованиям данного количественного исследования CEUS. После начала стадии 52 способ переходит на стадию 54. На стадии 54 получается начальная пара контрастного изображения и изображения тканей для желаемой части данного организма. Начальная пара контрастного изображения и изображения тканей может включать любую пару изображений, выбранную для целей количественного исследования CEUS, в качестве начального изображения, это не предполагает, что пара изображений обязательно должна содержать первую пару изображений, полученную с помощью системы. На стадии 56 устанавливают ROI/VOI в начальном полученном изображении тканей. Изображение тканей, которое используют для установления ROI/VOI, становится затем "фоновым" изображением тканей. Установление ROI/VOI в начальном полученном изображении тканей может включать ручное установление ROI/VOI. Рассматриваются также и другие способы установления ROI/VOI на начальном полученном изображении тканей, например с помощью соответствующей обработки изображения, конфигурируемой для детектирования данного участка или объема, представляющего интерес, на изображении тканей. На стадии 58 установленный ROI/VOI из начального изображения тканей автоматически совмещается с начальным контрастным изображением, и соответствующее контрастное изображение становится "фоновым" контрастным изображением. Как обсуждалось ранее, поскольку изображение тканей и соответствующее контрастное изображение получают одновременно (или почти одновременно), они автоматически совмещаются друг с другом, то есть участок, представляющий интерес (ROI), или объем, представляющий интерес (VOI), определенный на изображении тканей, определяет такой же ROI или VOI на контрастном изображении. На стадии 60 осуществляют количественный анализ ROI/VOI фонового контрастного изображения.
На стадии 62 способ получает следующую пару контрастного изображения и изображения тканей, соответствующую текущей паре контрастного изображения и изображения тканей. Текущая пара контрастного изображения и изображения тканей получается одновременно (или почти одновременно), при этом текущее контрастное изображение и текущее изображение тканей автоматически совмещаются друг с другом. На стадии 64 согласно способу устанавливают совмещение от кадра к кадру между (i) текущим изображением тканей и (ii) фоновым изображением тканей. Как отмечено в настоящем документе, изображение тканей, как правило, имеет большее содержание информации, чем соответствующее контрастное изображение, которое может использоваться для совмещения, и таким образом делает возможным преимущественное совмещение по изображению, от кадра к кадру, между кадром текущего изображения тканей и кадром фонового изображения тканей (в сравнении с прямым совмещением от кадра к кадру между текущим контрастным изображением и фоновым контрастным изображением). На стадии 66 совмещение от кадра к кадру между кадром текущего изображения тканей и кадром фонового изображения тканей используют для переноса ROI/VOI от (i) фонового контрастного изображения до (ii) текущего контрастного изображения. При преобразовании ROI/VOI фонового контрастного изображения в текущее контрастное изображение способ на стадии 68 включает в себя осуществление количественного анализа преобразованного ROI/VOI для текущего контрастного изображения. В другом варианте осуществления стадия 66 могла бы преобразовывать ROI/VOI от текущего контрастного изображения до фонового контрастного изображения. В дополнение к этому, в одном из вариантов осуществления совмещение и обработка могут происходить в реальном времени. В другом варианте осуществления сначала могут получаться все данные изображений (и слежения), а затем могла бы осуществляться обработка для совмещения и количественного анализа.
На стадии 70 согласно способу запрашивают, повторять ли способ с получением следующей пары контрастного изображения и изображения тканей. Если способ должен повторяться, тогда способ переходит к стадии 62 и осуществляется, как обсуждается выше в настоящем документе. В ином случае, если часть способа получения последующих пар контрастного изображения и изображения тканей количественного исследования CEUS заканчивается, тогда способ переходит на стадию 72. Стадия 72 представляет другие стадии, которые могут осуществляться в соответствии с требованиями осуществления или применения данного количественного исследования CEUS. Например, стадия 72 может включать в себя дополнительную обработку для изучения получения ультразвуковых изображений с контрастным усилением. Стадия 72 может также включать в себя дополнительную обработку, относящуюся к объединению диагностики и терапии, например, посредством обеспечения целевой информации и нацеливания для биопсии и/или терапевтических процедур.
Теперь будет понятно, что описывается способ количественного трехмерного ультразвукового исследования с контрастным усилением (CEUS), который включает в себя получение начальной пары ультразвукового контрастного изображения и изображения тканей для желаемой части данного организма. Устанавливают участок, представляющий интерес (ROI), или объем, представляющий интерес (VOI), на начальном полученном изображении тканей, при этом соответствующее изображение тканей становится фоновым изображением тканей. Установленный ROI или VOI на начальном изображении тканей автоматически совмещается с начальным контрастным изображением, при этом соответствующее контрастное изображение становится фоновым контрастным изображением. Осуществляют количественный анализ ROI или VOI фонового контрастного изображения. Получают следующую пару ультразвукового контрастного изображения и изображения тканей, соответствующую i-й текущей паре контрастного изображения и изображения тканей. После получения следующей пары ультразвукового контрастного изображения и изображения тканей устанавливают совмещение от кадра к кадру между (i) текущим изображением тканей и (ii) фоновым изображением тканей. Совмещение от кадра к кадру между кадром текущего изображения тканей и кадром фонового изображения тканей используют для переноса ROI или VOI от (i) фонового контрастного изображения на (ii) текущее контрастное изображение, создавая при этом преобразованный ROI или VOI на текущем контрастном изображении. Затем осуществляют количественный анализ преобразованного ROI или VOI текущего контрастного изображения. В одном из вариантов осуществления получение начальной пары контрастного изображения и изображения тканей включает в себя получение изображения тканей перед получением контрастного изображения.
В соответствии с другим вариантом осуществления начальная пара контрастного изображения и изображения тканей может включать в себя любую пару изображений, выбранную для целей количественного исследования CEUS, как начальную пару изображений, что не предполагает, что пара изображений обязательно должна включать в себя первую полученную пару изображений. В другом варианте осуществления установление ROI или VOI на полученном начальном изображении тканей включает в себя ручное определение ROI или VOI на фоновом изображении тканей. В дополнительном варианте осуществления стадия получения начальной пары контрастного изображения и изображения тканей включает в себя получение контрастного изображения и изображения тканей одновременно или почти одновременно таким образом, что контрастное изображение и изображения тканей автоматически совмещаются друг с другом. В результате, ROI или VOI, определенные на фоновом изображении тканей, определяют такой же ROI или VOI на фоновом контрастном изображении. Кроме того, получение текущей пары контрастного изображения и изображения тканей включает получение текущего контрастного изображения и текущего изображения тканей одновременно или почти одновременно таким образом, что текущее контрастное изображение и текущее изображение тканей автоматически совмещаются друг с другом, при этом, кроме того, ROI или VOI, определенный на текущем изображении тканей, определяет такой же ROI или VOI на текущем контрастном изображении.
В соответствии еще с одним вариантом осуществления способ дополнительно включает в себя повторение стадий получения следующей пары контрастного изображения и изображения тканей, с установлением совмещения от кадра к кадру между следующим текущим изображением тканей и фоновым изображением тканей, с использованием совмещения от кадра к кадру между кадром следующего текущего изображения тканей и кадром фонового изображения тканей для переноса ROI или VOI от (i) фонового контрастного изображения на (ii) следующее контрастное изображение, тем самым создавая преобразованный ROI или VOI на следующем текущем контрастном изображении и осуществляя количественный анализ на преобразованной ROI или VOI следующего текущего контрастного изображения. В дополнение к этому, способ включает в себя объединение количественного исследования CEUS, по меньшей мере, с одной процедурой, выбранной из группы, состоящей из процедур дополнительной диагностики, процедур терапии и обеспечения целевой информации, наведения и нацеливания для инвазивной процедуры и/или локализованной терапии.
В одном из вариантов осуществления стадии (i) получения следующей пары контрастного изображения и изображения тканей, (ii) установления совмещения от кадра к кадру и (iii) использования совмещения от кадра к кадру между кадром текущего изображения тканей и кадром фонового изображения тканей для переноса ROI или VOI от фонового контрастного изображения на текущее контрастное изображение вместе содержат совмещение по изображению, которое автоматически компенсирует движение тканей на текущем контрастном изображении, которое может произойти между получением начального фонового контрастного изображения и текущего контрастного изображения. Автоматическая компенсация движения тканей осуществляется в реальном времени с использованием совмещения по изображению.
В соответствии с другим вариантом осуществления способ дополнительно включает получение текущей пары контрастного изображения и изображения тканей, которые содержат i-е контрастное изображение и i-е изображение тканей. Установление совмещения от кадра к кадру включает в себя определение преобразования Ti движения для ROI или VOI от фонового изображения до i-го изображения тканей. В дополнение к этому, преобразование Ti движения определяется как функция информации о совмещении изображений внутри ROI или VOI от фонового изображения до i-го изображения тканей. Ti представляет собой преобразование, описывающее соответствующие трансляцию и поворот. Способ использует совмещение от кадра к кадру для переноса ROI или VOI и включает в себя применение преобразования Ti для преобразования фонового контрастного изображения ROI или VOI в ROIi или VOIi, соответственно, для кадра i-го контрастного изображения.
Еще в одном варианте осуществления способ дополнительно содержит объединение стадий получения начальной и следующей пар ультразвукового контрастного изображения и изображения тканей с системой отслеживания положения. В дополнение к этому, способ дополнительно включает в себя измерения, по меньшей мере, одного параметра из положения и ориентации ультразвукового зонда с помощью системы слежения и использования измеренного положения/ориентации для более близкого совмещения ROI или VOI на кадрах фонового изображения тканей и i-го изображения тканей и для обеспечения улучшенной исходной точки для совмещения по изображению между ними, от кадра к кадру. Кроме того, способ включает устранение вращательного компонента движения ультразвукового зонда с использованием отслеживания зонда, где совмещение по изображению дополнительно ограничивается до трех степеней свободы (3 DOF), соответствующих трансляции в системе координат (x, y, z), вместо шести степеней свободы (6 DoF), соответствующих трансляции и повороту в системе координат (x, y, z, θx, θy, θz).
Кроме того, еще в одном варианте осуществления способ включает в себя одновременную обработку информации об отслеживании положения от системы слежения вместе с потоком изображений от ультразвукового сканера, где ультразвуковой сканер конфигурируется для получения кадров начального и i-го изображения тканей и контрастного изображения. Положение Tbase ультразвукового зонда сохраняется во время получения фонового изображения, и для каждого последующего i-го изображения тканей вычисляется разность положений Tbase i между кадром i-го изображения тканей и фонового изображения тканей. Разность положений Tbase i используется для определения Ti 0, соответствующего разности положений ROI или VOI на кадре i-го изображения тканей, по сравнению с ROI кадра фонового изображения тканей в предположении отсутствия движения тканей, где любое видимое движение вводится только посредством движения зонда по отношению к тканям. Наконец, разница положений Ti 0 используется как исходное положение для процесса совмещения по изображению для определения преобразования Ti движения ROI или VOI от фонового изображения тканей до i-го изображения тканей, где преобразование Ti движения определяется как функция информации о совмещении изображений в ROI или VOI от фонового изображения до i-го изображения тканей.
В соответствии еще с одним вариантом осуществления осуществление количественного анализа содержимого изображений в ROIi или VOIi для кадра i-го контрастного изображения включает в себя генерирование количественных результатов. Кроме того, способ включает в себя анализ временных рядов количественных результатов, полученных от отдельных кадров из множества последующих полученных кадров и контрастных изображений, для определения параметров, которые могут обеспечить диагностическую информацию. В дополнение к этому, количественный анализ включает в себя вычисление среднего значения и стандартного отклонения яркости, и параметры включают константы перфузии тканей.
Кроме того, устройство ультразвукового сканера конфигурируется для осуществления количественного трехмерного ультразвукового исследования с контрастным усилением (CEUS) в соответствии с различными вариантами осуществления способа по настоящему описанию.
Как обсуждается в настоящем документе, варианты осуществления настоящего раскрытия относятся к предоставлению возможности для автоматического количественного определения объемных ультразвуковых контрастных изображений, которое позволяет создание "параметрических" изображений, которые содержат информацию, извлеченную из "сырого" контрастного изображения посредством обработки изображений. Способы в соответствии с вариантами осуществления настоящего раскрытия с преимуществами превосходят известные из литературы способы получения таких параметрических изображений, которые являются трудоемкими из-за артефактов, связанных с движением изображения. Варианты осуществления настоящего раскрытия с преимуществами автоматически компенсируют движение тканей.
Варианты осуществления настоящего раскрытия, кроме того, включают в себя систему пространственного слежения, которая добавляет устойчивость способу обработки изображений варианта осуществления, в котором система пространственного слежения отсутствует. В дополнение к этому, система пространственного слежения может дополнительно использоваться для объединения полученного "параметрического" изображения с системой нацеливания изображений, где "параметрическое" (в противоположность "сырому" контрастному изображению) контрастное изображение может использоваться для получения диагностической информации для нацеливания во время инвазивного вмешательства или терапии.
Хотя выше подробно описаны только несколько примерных вариантов осуществления, специалисты в данной области легко поймут, что множество модификаций возможно в примерных вариантах осуществления без существенного отклонения от новых концепций и преимуществ вариантов осуществления настоящего раскрытия. Например, варианты осуществления настоящего раскрытия могут применяться к исследованиям получения ультразвуковых изображений с контрастным усилением. В частности, настоящее изобретение может объединять диагностику и терапию посредством получения целевой информации и нацеливания для биопсии и терапевтических процедур. В дополнение к этому, ультразвуковой сканер и рабочая станция могут также содержать единый узел, конфигурируемый для осуществления различных аспектов способа количественного исследования CEUS, как описано в настоящем документе. Соответственно, все такие модификации, как предполагается, должны включаться в рамки вариантов осуществления настоящего раскрытия, как определено в следующей далее формуле изобретения. В формуле изобретения признаки типа "средство плюс функция" предназначены для охвата структур, описанных в настоящем документе, как осуществляющие упомянутую функцию, и не только структурных эквивалентов, но также и эквивалентных структур.
В дополнение к этому, любые ссылочные обозначения, расположенные в скобках в одном или нескольких пунктах формулы изобретения, не должны рассматриваться как ограничивающие формулу изобретения. Слова "содержащий", "содержит" и тому подобное не исключают присутствия элементов или стадий, иных, чем перечислены в любом пункте формулы изобретения или в описании в целом. Упоминание элементов в единственном числе не исключает упоминаний таких элементов во множественном числе, и наоборот. Один или несколько вариантов осуществления могут осуществляться посредством аппаратного обеспечения, содержащего несколько различных элементов, и/или посредством соответствующим образом программируемого компьютера. В пункте формулы изобретения, относящемся к устройству, перечисляющему несколько средств, несколько из этих средств могут воплощаться с помощью одного и того же элемента аппаратного обеспечения. Только лишь тот факт, что определенные меры упоминаются во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер не может использоваться для получения преимуществ.
Claims (15)
1. Способ количественного трехмерного ультразвукового исследования с контрастным усилением (CEUS), включающий в себя этапы, на которых:
получают (54) начальную пару ультразвукового контрастного изображения и изображения тканей для желаемой части данного организма;
устанавливают (56) один из участка, представляющего интерес (ROI), или объема, представляющего интерес (VOI), на начальном полученном изображении тканей, при этом соответствующее изображение тканей становится фоновым изображением тканей;
выполняют автоматическое совмещение (58) установленного ROI или VOI для начального изображения тканей с начальным контрастным изображением, при этом соответствующее контрастное изображение становится фоновым контрастным изображением;
осуществляют количественный анализ (60) в отношении ROI или VOI фонового контрастного изображения;
получают (62) следующую пару ультразвукового контрастного изображения и изображения тканей, соответствующую i-й текущей паре контрастного изображения и изображения тканей;
устанавливают совмещение от кадра к кадру (64) между (i) текущим изображением тканей и (ii) фоновым изображением тканей;
используют совмещение от кадра к кадру (66) между кадром текущего изображения тканей и кадром фонового изображения тканей для переноса ROI или VOI от (i) фонового контрастного изображения на (ii) текущее контрастное изображение, тем самым создавая преобразованный ROI или VOI на текущем контрастном изображении; и
осуществляют количественный анализ (68) в отношении преобразованного ROI или VOI для текущего контрастного изображения.
получают (54) начальную пару ультразвукового контрастного изображения и изображения тканей для желаемой части данного организма;
устанавливают (56) один из участка, представляющего интерес (ROI), или объема, представляющего интерес (VOI), на начальном полученном изображении тканей, при этом соответствующее изображение тканей становится фоновым изображением тканей;
выполняют автоматическое совмещение (58) установленного ROI или VOI для начального изображения тканей с начальным контрастным изображением, при этом соответствующее контрастное изображение становится фоновым контрастным изображением;
осуществляют количественный анализ (60) в отношении ROI или VOI фонового контрастного изображения;
получают (62) следующую пару ультразвукового контрастного изображения и изображения тканей, соответствующую i-й текущей паре контрастного изображения и изображения тканей;
устанавливают совмещение от кадра к кадру (64) между (i) текущим изображением тканей и (ii) фоновым изображением тканей;
используют совмещение от кадра к кадру (66) между кадром текущего изображения тканей и кадром фонового изображения тканей для переноса ROI или VOI от (i) фонового контрастного изображения на (ii) текущее контрастное изображение, тем самым создавая преобразованный ROI или VOI на текущем контрастном изображении; и
осуществляют количественный анализ (68) в отношении преобразованного ROI или VOI для текущего контрастного изображения.
2. Способ по п.1, в котором на этапе получения начальной пары контрастного изображения и изображения тканей получают контрастное изображение и изображение тканей одновременно или почти одновременно таким образом, что контрастное изображение и изображения тканей автоматически совмещаются друг с другом.
3. Способ по п.1, в котором при получении текущей пары контрастного изображения и изображения тканей получают текущее контрастное изображение и текущее изображение тканей одновременно или почти одновременно таким образом, что текущее контрастное изображение и текущее изображение тканей автоматически совмещаются друг с другом, причем, кроме того, ROI или VOI, определенный на текущем изображении тканей, определяет такой же ROI или VOI на текущем контрастном изображении.
4. Способ по п.1, дополнительно содержащий этап, на котором:
повторяют этапы получения следующей пары контрастного изображения и изображения тканей, установления совмещения от кадра к кадру между следующим текущим изображением тканей и фоновым изображением тканей, использования совмещения от кадра к кадру между кадром следующего текущего изображения тканей и кадром фонового изображения тканей для переноса ROI или VOI от (i) фонового контрастного изображения на (ii) следующее контрастное изображение, тем самым создавая преобразованный ROI или VOI на следующем текущем контрастном изображении, и осуществления количественного анализа для преобразованного ROI или VOI в отношении следующего текущего контрастного изображения.
повторяют этапы получения следующей пары контрастного изображения и изображения тканей, установления совмещения от кадра к кадру между следующим текущим изображением тканей и фоновым изображением тканей, использования совмещения от кадра к кадру между кадром следующего текущего изображения тканей и кадром фонового изображения тканей для переноса ROI или VOI от (i) фонового контрастного изображения на (ii) следующее контрастное изображение, тем самым создавая преобразованный ROI или VOI на следующем текущем контрастном изображении, и осуществления количественного анализа для преобразованного ROI или VOI в отношении следующего текущего контрастного изображения.
5. Способ по п.4, дополнительно содержащий этап, на котором:
объединяют количественное исследование CEUS по меньшей мере с одной процедурой, выбранной из группы, состоящей из дополнительных диагностических процедур, терапевтических процедур и обеспечения целевой информации, наведения и нацеливания для инвазивной процедуры и/или локализованной терапии.
объединяют количественное исследование CEUS по меньшей мере с одной процедурой, выбранной из группы, состоящей из дополнительных диагностических процедур, терапевтических процедур и обеспечения целевой информации, наведения и нацеливания для инвазивной процедуры и/или локализованной терапии.
6. Способ по п.1, в котором этапы (i) получения следующей пары контрастного изображения и изображения тканей, (ii) установления совмещения от кадра к кадру и (iii) использования совмещения от кадра к кадру между кадром текущего изображения тканей и кадром фонового изображения тканей для переноса ROI или VOI от фонового контрастного изображения на текущее контрастное изображение вместе включают в себя совмещение по изображению, которое автоматически компенсирует движение тканей текущего контрастного изображения, которое может произойти между получением начального фонового контрастного изображения и текущего контрастного изображения.
7. Способ по п.1, в котором текущая пара контрастного изображения и изображения тканей содержит i-е контрастное изображение и i-е изображение тканей, при этом при установлении совмещения от кадра к кадру определяют преобразование Ti движения ROI или VOI от фонового изображения до i-го изображения тканей, при этом преобразование Ti движения определяют как функцию информации о совмещении изображений в ROI или VOI от фонового изображения до i-го изображения тканей.
8. Способ по п.7, в котором Ti представляет собой преобразование, описывающее соответствующие трансляцию и поворот, причем, кроме того, при использовании совмещения от кадра к кадру для переноса ROI или VOI применяют преобразование Тi для преобразования фонового контрастного изображения ROI или VOI в ROIi или VOIi соответственно для кадра i-го контрастного изображения.
9. Способ по п.1, дополнительно содержащий этап, на котором:
объединяют этапы получения начальной и следующих пар ультразвуковых контрастных изображений и изображений тканей с системой отслеживания положения.
объединяют этапы получения начальной и следующих пар ультразвуковых контрастных изображений и изображений тканей с системой отслеживания положения.
10. Способ по п.9, дополнительно содержащий этап, на котором:
выполняют измерение по меньшей мере одного из положения и ориентации ультразвукового зонда с помощью системы слежения и используют измеренное положение/ориентацию для более близкого совмещения ROI или VOI в кадрах фонового изображения тканей и i-го изображения тканей и для получения улучшенной исходной точки для совмещения по изображению между ними от кадра к кадру.
выполняют измерение по меньшей мере одного из положения и ориентации ультразвукового зонда с помощью системы слежения и используют измеренное положение/ориентацию для более близкого совмещения ROI или VOI в кадрах фонового изображения тканей и i-го изображения тканей и для получения улучшенной исходной точки для совмещения по изображению между ними от кадра к кадру.
11. Способ по п.10, дополнительно содержащий этап, на котором:
устраняют вращательный компонент движения ультразвукового зонда с использованием отслеживания зонда, причем совмещение по изображению дополнительно ограничивается до трех степеней свободы (3 DOF), соответствующих трансляции в системе координат (x, y, z), вместо шести степеней свободы (6 DOF), соответствующих трансляции и повороту в системе координат (x, y, z, θх, θy, θz).
устраняют вращательный компонент движения ультразвукового зонда с использованием отслеживания зонда, причем совмещение по изображению дополнительно ограничивается до трех степеней свободы (3 DOF), соответствующих трансляции в системе координат (x, y, z), вместо шести степеней свободы (6 DOF), соответствующих трансляции и повороту в системе координат (x, y, z, θх, θy, θz).
12. Способ по п.11, дополнительно содержащий этапы, на которых:
выполняют одновременную обработку информации об отслеживании положения от системы слежения и потока изображений от ультразвукового сканера, причем ультразвуковой сканер сконфигурирован для получения кадров начального и i-го изображений тканей и контрастных изображений;
сохраняют положение Tbase ультразвукового зонда во время получения фонового изображения и для каждого последующего i-го изображения тканей вычисляют разность положений между кадром i-го изображения тканей и фоновым изображением тканей;
между кадром i-го изображения тканей и фоновым изображением тканей;
используют разность положений для определения
для определения  соответствующего разности положений ROI или VOI в кадре i-го изображения тканей, по сравнению с ROI кадра фонового изображения тканей в предположении отсутствия движения тканей, при этом любое видимое движение вводится только посредством движения зонда по отношению к тканям; и
соответствующего разности положений ROI или VOI в кадре i-го изображения тканей, по сравнению с ROI кадра фонового изображения тканей в предположении отсутствия движения тканей, при этом любое видимое движение вводится только посредством движения зонда по отношению к тканям; и
используют разность положений в качестве исходного положения для способа совмещения по изображению для определения преобразования Ti движения ROI или VOI от фонового изображения тканей до i-го изображения тканей, причем преобразование Тi движения определяют как функцию информации о совмещении изображений в ROI или VOI от фонового изображения до i-го изображения тканей.
в качестве исходного положения для способа совмещения по изображению для определения преобразования Ti движения ROI или VOI от фонового изображения тканей до i-го изображения тканей, причем преобразование Тi движения определяют как функцию информации о совмещении изображений в ROI или VOI от фонового изображения до i-го изображения тканей.
выполняют одновременную обработку информации об отслеживании положения от системы слежения и потока изображений от ультразвукового сканера, причем ультразвуковой сканер сконфигурирован для получения кадров начального и i-го изображений тканей и контрастных изображений;
сохраняют положение Tbase ультразвукового зонда во время получения фонового изображения и для каждого последующего i-го изображения тканей вычисляют разность положений
используют разность положений
используют разность положений
13. Способ по п.1, в котором при осуществлении количественного анализа содержимого изображений в ROIi или VOIi для кадра i-го контрастного изображения генерируют количественные результаты, при этом способ дополнительно содержит этап, на котором:
выполняют анализ временных рядов количественных результатов, полученных от отдельных кадров из множества последующих кадров получаемых i-х контрастных изображений, для определения параметров, которые могут обеспечить диагностическую информацию.
выполняют анализ временных рядов количественных результатов, полученных от отдельных кадров из множества последующих кадров получаемых i-х контрастных изображений, для определения параметров, которые могут обеспечить диагностическую информацию.
14. Способ по п.13, в котором при количественном анализе вычисляют среднее значение и стандартное отклонение яркости, при этом упомянутые параметры включают в себя константы перфузии тканей.
15. Устройство ультразвукового сканера, сконфигурированное для осуществления количественного трехмерного контрастного ультразвукового исследования с контрастным усилением (CEUS) в соответствии со способом по п.1.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US98779607P | 2007-11-14 | 2007-11-14 | |
| US60/987,796 | 2007-11-14 | ||
| US4530708P | 2008-04-16 | 2008-04-16 | |
| US61/045,307 | 2008-04-16 | ||
| PCT/IB2008/054620 WO2009063361A1 (en) | 2007-11-14 | 2008-11-05 | System and method for quantitative 3d ceus analysis |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2010123934A RU2010123934A (ru) | 2011-12-20 |
| RU2468435C2 true RU2468435C2 (ru) | 2012-11-27 |
Family
ID=40352019
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010123934/08A RU2468435C2 (ru) | 2007-11-14 | 2008-11-05 | Система и способ количественного трехмерного исследования ceus |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8734349B2 (ru) |
| EP (1) | EP2208182B1 (ru) |
| JP (1) | JP5592796B2 (ru) |
| CN (1) | CN101861600B (ru) |
| AT (1) | ATE512426T1 (ru) |
| RU (1) | RU2468435C2 (ru) |
| WO (1) | WO2009063361A1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2710668C2 (ru) * | 2014-12-03 | 2019-12-30 | Конинклейке Филипс Н.В. | Цифровая субтракционная ангиография с аппаратной компенсацией движения |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104382650B (zh) * | 2008-05-28 | 2017-04-12 | 泰克尼恩研究和发展基金有限公司 | 用于柔性针操纵的超声引导机器人 |
| US9545242B2 (en) | 2009-07-31 | 2017-01-17 | Samsung Medison Co., Ltd. | Sensor coordinate calibration in an ultrasound system |
| KR101121286B1 (ko) | 2009-07-31 | 2012-03-23 | 한국과학기술원 | 센서의 교정을 수행하는 초음파 시스템 및 방법 |
| JP5829008B2 (ja) * | 2010-04-23 | 2015-12-09 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| EP2723241B1 (en) * | 2011-06-27 | 2014-11-19 | Koninklijke Philips N.V. | Ultrasound-image-guide system and volume-motion-base calibration method |
| BR112014005451B1 (pt) | 2011-09-13 | 2021-11-09 | Koninklijke Philips N.V. | Sistema de registro |
| JP6081301B2 (ja) * | 2012-06-27 | 2017-02-15 | 東芝メディカルシステムズ株式会社 | 超音波診断装置及び画像データの補正方法 |
| WO2015039302A1 (en) * | 2013-09-18 | 2015-03-26 | Shenzhen Mindray Bio-Medical Electronics Co., Ltd | Method and system for guided ultrasound image acquisition |
| WO2016066497A1 (en) | 2014-10-27 | 2016-05-06 | Koninklijke Philips N.V. | Method of visualizing a sequence of ultrasound images, computer program product and ultrasound system |
| CA2981219C (en) * | 2015-04-02 | 2024-01-23 | Cardiawave | Method and apparatus for treating valvular disease |
| WO2016178198A1 (en) * | 2015-05-07 | 2016-11-10 | Koninklijke Philips N.V. | System and method for motion compensation in medical procedures |
| US10638954B2 (en) * | 2015-07-23 | 2020-05-05 | Biosense Webster (Israel) Ltd. | Surface registration of a CT image with a magnetic tracking system |
| CN107194925A (zh) * | 2017-05-31 | 2017-09-22 | 上海联影医疗科技有限公司 | 图像处理方法及系统 |
| CN107273904A (zh) * | 2017-05-31 | 2017-10-20 | 上海联影医疗科技有限公司 | 图像处理方法及系统 |
| WO2018218478A1 (zh) | 2017-05-31 | 2018-12-06 | 上海联影医疗科技有限公司 | 图像处理方法及系统 |
| CN107292867A (zh) * | 2017-05-31 | 2017-10-24 | 上海联影医疗科技有限公司 | 图像处理方法及系统 |
| CN111047580B (zh) * | 2019-12-14 | 2022-08-23 | 四川大学华西医院 | 用于超声分子影像研究的声像图定量分析及综合定量分析方法 |
| CN113780483B (zh) * | 2021-11-12 | 2022-01-28 | 首都医科大学附属北京潞河医院 | 结节超声分类数据处理方法及数据处理系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2172490C2 (ru) * | 1998-11-03 | 2001-08-20 | Ростовский НИИ акушерства и педиатрии | Способ прогнозирования воспалительных заболеваний молочной железы при эндопластике |
| US20050079132A1 (en) * | 2003-04-08 | 2005-04-14 | Xingwu Wang | Medical device with low magnetic susceptibility |
| US20050107870A1 (en) * | 2003-04-08 | 2005-05-19 | Xingwu Wang | Medical device with multiple coating layers |
| US20050192215A1 (en) * | 2000-01-21 | 2005-09-01 | Malabika Ghosh | Methods and materials relating to novel polypeptides and polynucleotides |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3459304B2 (ja) * | 1995-01-31 | 2003-10-20 | 株式会社東芝 | 超音波診断装置 |
| US5538004A (en) * | 1995-02-28 | 1996-07-23 | Hewlett-Packard Company | Method and apparatus for tissue-centered scan conversion in an ultrasound imaging system |
| US5743266A (en) * | 1995-04-25 | 1998-04-28 | Molecular Biosystems, Inc. | Method for processing real-time contrast enhanced ultrasonic images |
| GB9701274D0 (en) * | 1997-01-22 | 1997-03-12 | Andaris Ltd | Ultrasound contrast imaging |
| US6317623B1 (en) * | 1999-03-12 | 2001-11-13 | Medrad, Inc. | Apparatus and method for controlling contrast enhanced imaging procedures |
| US6416477B1 (en) * | 2000-08-22 | 2002-07-09 | Koninklijke Philips Electronics N.V. | Ultrasonic diagnostic systems with spatial compounded panoramic imaging |
| EP1454585B1 (en) * | 2001-11-22 | 2012-02-29 | Kabushiki Kaisha Toshiba | Ultrasonograph, work flow edition system, and ultrasonograph control method |
| JP3748848B2 (ja) * | 2002-11-11 | 2006-02-22 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| EP1692543A1 (en) * | 2003-12-03 | 2006-08-23 | Koninklijke Philips Electronics N.V. | Ultrasonic imaging system and method for simultaneous display of blood flow and perfusion parameters |
| US20060239585A1 (en) | 2005-04-04 | 2006-10-26 | Valadez Gerardo H | System and method for reducing artifacts in motion corrected dynamic image sequences |
| US8460191B2 (en) * | 2005-05-20 | 2013-06-11 | Hitachi Medical Corporation | Ultrasonic medical diagnostic device for imaging changes with time |
| CN100453050C (zh) * | 2005-09-21 | 2009-01-21 | 北京市肿瘤防治研究所 | 提高超声造影图像分辨力的方法和超声造影成像仪 |
| US8303505B2 (en) | 2005-12-02 | 2012-11-06 | Abbott Cardiovascular Systems Inc. | Methods and apparatuses for image guided medical procedures |
| JP2009082181A (ja) * | 2007-09-27 | 2009-04-23 | Aloka Co Ltd | 超音波診断装置 |
-
2008
- 2008-11-05 AT AT08848759T patent/ATE512426T1/de not_active IP Right Cessation
- 2008-11-05 RU RU2010123934/08A patent/RU2468435C2/ru not_active IP Right Cessation
- 2008-11-05 US US12/740,004 patent/US8734349B2/en active Active
- 2008-11-05 EP EP08848759A patent/EP2208182B1/en active Active
- 2008-11-05 JP JP2010533688A patent/JP5592796B2/ja active Active
- 2008-11-05 CN CN2008801161253A patent/CN101861600B/zh active Active
- 2008-11-05 WO PCT/IB2008/054620 patent/WO2009063361A1/en active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2172490C2 (ru) * | 1998-11-03 | 2001-08-20 | Ростовский НИИ акушерства и педиатрии | Способ прогнозирования воспалительных заболеваний молочной железы при эндопластике |
| US20050192215A1 (en) * | 2000-01-21 | 2005-09-01 | Malabika Ghosh | Methods and materials relating to novel polypeptides and polynucleotides |
| US20050079132A1 (en) * | 2003-04-08 | 2005-04-14 | Xingwu Wang | Medical device with low magnetic susceptibility |
| US20050107870A1 (en) * | 2003-04-08 | 2005-05-19 | Xingwu Wang | Medical device with multiple coating layers |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2710668C2 (ru) * | 2014-12-03 | 2019-12-30 | Конинклейке Филипс Н.В. | Цифровая субтракционная ангиография с аппаратной компенсацией движения |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100256495A1 (en) | 2010-10-07 |
| WO2009063361A1 (en) | 2009-05-22 |
| RU2010123934A (ru) | 2011-12-20 |
| CN101861600B (zh) | 2012-11-28 |
| US8734349B2 (en) | 2014-05-27 |
| EP2208182B1 (en) | 2011-06-08 |
| EP2208182A1 (en) | 2010-07-21 |
| ATE512426T1 (de) | 2011-06-15 |
| CN101861600A (zh) | 2010-10-13 |
| JP5592796B2 (ja) | 2014-09-17 |
| JP2011502681A (ja) | 2011-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2468435C2 (ru) | Система и способ количественного трехмерного исследования ceus | |
| JP6073971B2 (ja) | 医用画像処理装置 | |
| JP5562598B2 (ja) | 画像表示装置、画像表示方法および磁気共鳴イメージング装置 | |
| JP4490442B2 (ja) | 手術中の2次元画像および手術前の3次元画像をアフィン重ね合わせするための方法およびシステム | |
| Li et al. | Quantification and MRI validation of regional contractile dysfunction in mice post myocardial infarction using high resolution ultrasound | |
| Huang et al. | Dynamic 2D ultrasound and 3D CT image registration of the beating heart | |
| US20110190633A1 (en) | Image processing apparatus, ultrasonic diagnostic apparatus, and image processing method | |
| US8559686B2 (en) | Medical image data alignment apparatus, method and program | |
| JP2011502687A (ja) | 3d造影超音波を使用する介入ナビゲーション | |
| Nahrendorf et al. | High-resolution imaging of murine myocardial infarction with delayed-enhancement cine micro-CT | |
| Jirik et al. | Ultrasound perfusion analysis combining bolus-tracking and burst-replenishment | |
| NL2004470A (en) | System and method for center point trajectory mapping. | |
| US11940578B2 (en) | Super resolution in positron emission tomography imaging using ultrafast ultrasound imaging | |
| CN101658428A (zh) | 灌注成像技术中对位图进行处理的方法和系统 | |
| JP2009247739A (ja) | 医用画像処理表示装置、そのコンピュータ処理プログラム及び超音波診断装置。 | |
| Ferraiuoli et al. | Measurement of in vitro cardiac deformation by means of 3D digital image correlation and ultrasound 2D speckle-tracking echocardiography | |
| JP2010154982A (ja) | X線コンピュータ断層撮影装置および画像処理装置 | |
| WO2009096290A1 (ja) | 医用画像診断装置及び方法 | |
| Khalil et al. | Mitral valve rigid registration using 2D echocardiography and cardiac computed tomography | |
| Tokuda et al. | Motion tracking in MR-guided liver therapy by using navigator echoes and projection profile matching1 | |
| CN110934613B (zh) | 超声波诊断装置及超声波诊断方法 | |
| JP2010246777A (ja) | 医用画像処理装置および方法ならびにプログラム | |
| Soltani | In-Vivo Digital Image Correlation Studies of the Motion and Deformation of the Human Heart during Open Heart Surgery | |
| KR101628723B1 (ko) | 시계열 영상 분석방법 및 분석프로그램 | |
| Brekken et al. | 3D visualization of strain in abdominal aortic aneurysms based on navigated ultrasound imaging |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20191106 |