RU2425409C2 - Способ управления движениями пилотажного тренажера и пилотажный тренажер, реализующий такой способ - Google Patents
Способ управления движениями пилотажного тренажера и пилотажный тренажер, реализующий такой способ Download PDFInfo
- Publication number
- RU2425409C2 RU2425409C2 RU2008118206/08A RU2008118206A RU2425409C2 RU 2425409 C2 RU2425409 C2 RU 2425409C2 RU 2008118206/08 A RU2008118206/08 A RU 2008118206/08A RU 2008118206 A RU2008118206 A RU 2008118206A RU 2425409 C2 RU2425409 C2 RU 2425409C2
- Authority
- RU
- Russia
- Prior art keywords
- roll
- simulator
- pilot
- angular
- component
- Prior art date
Links
Images




















Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/08—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of aircraft, e.g. Link trainer
- G09B9/12—Motion systems for aircraft simulators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/408—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by data handling or data format, e.g. reading, buffering or conversion of data
- G05B19/4086—Coordinate conversions; Other special calculations
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Manufacturing & Machinery (AREA)
- Human Computer Interaction (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
Изобретение относится к способу управления движениями пилотажного тренажера, предусматривающими линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота. Технический результат - точность воспроизведения ощущений движения в пилотажных тренажерах. Способ предусматривает математические преобразования поперечного положения «у» и угла φ крена для получения упомянутых ускорений, при этом математические преобразования используются, по меньшей мере, с одной из следующих коррекций: опережающей подачей ошибки удельной силы, обуславливаемой внесением гашения движения в направлении «у» в функцию преобразования угла крена; разложением удельной силы в положении пилота и введением комплементарных фильтров для воспроизведения подходящих боковых сил, действующих на кресло пилота из-за поперечных ускорений; математическими преобразованиями, связывающими положение пилота в летательном аппарате и пилотажном тренажере с центроидом подвижной платформы. 4 н. и 7 з.п. ф-лы, 20 ил.
Description
Область техники, к которой относится изобретение
Настоящее изобретение относится к пилотажным тренажерам и способам управления пилотажными тренажерами.
Уровень техники
Системы подвижности пилотажных тренажеров, или, короче говоря, пилотажные тренажеры, представлены системами подвижности с 6-ю степенями свободы. Пилотажные тренажеры обеспечивают точность воспроизведения ощущений движения, обуславливаемых маневрами, посредством фильтрации угловых ускорений и (линейных) удельных сил. Эти сигналы важны для восприятия пилота, и поэтому движения пилотажных тренажеров должны быть согласованы с движениями реального летательного аппарата. В описаниях известных способов управления пилотажными тренажерами обнаружены следующие алгоритмы.
Преобразование центроида
Поскольку сущность изобретения состоит в имитации движения, воспринимаемого пилотом, пилотажный тренажер гипотетически находится на летательном аппарате с соответствующей базисной точкой Р пилота (Фиг.4).
Нижеследующие логические рассуждения (Фиг.8) всегда учитываются в литературе (см. Russell V. Parrish, James Е. Dieudonne and Dennis J. Martin Jr., "Motion software for a synergistic six-degrees-of freedom motion base", p.9, NASA TN D-7350, декабрь 1973 / М.Baarspul, Delft University of Technology, "The generation of motion cues on a six-degrees-of freedom motion system", p.5, Report LR-248, июнь 1977 / G.A.J. van de Moesdijk, F.L. Van Biervliet, Delft University of Technology, "Investigation to improve the motion software of the Fokker F-28 flight simulator", p.4, Report LR-358, сентябрь 1982) и в практических приложениях.
Удельные силы вычисляются на летательном аппарате в месте нахождения центроида гипотетической платформы в соответствии с формулами, приведенными в нижеследующих первоисточниках: О.Н. Gerlach, Technische Hogeschool Delft, "Vliegeigenshappen 1", p.227, Dictaat D 26, октябрь-ноябрь 1981 / M.Baarspul, Delft University of Technology, "The generation of motion cues on a six-degrees-of freedom motion system", p.6, Report LR-248, июнь 1977.
Например, в направлении «у»:
где Ау центроида - составляющая удельной силы вдоль оси «у» в гипотетическом месте нахождения центроида тренажера по отношению к системе координат летательного аппарата; Ау ц.т. - составляющая удельной силы вдоль оси «у» в центре тяжести летательного аппарата, р - угловая скорость крена; q - угловая скорость тангажа, r - угловая скорость рыскания,  - угловое ускорение крена,
- угловое ускорение крена,  - угловое ускорение рыскания, zc ЛА - координата «z» центроида в системе координат летательного аппарата. В большинстве случаев величиной zc ЛА пренебрегают.
- угловое ускорение рыскания, zc ЛА - координата «z» центроида в системе координат летательного аппарата. В большинстве случаев величиной zc ЛА пренебрегают.
В программе движения в качестве входных сигналов используются три корректируемые составляющие удельной силы - Ах центроида, Ау центроида,
Az центроида - и три угловые скорости р, q, r (или угловые ускорения). 6 выходных сигналов программы движения управляют положением (по 3-м координатам) центроида подвижной платформы, а также 3-мя углами Эйлера.
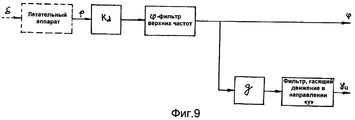
Имитация углового ускорения крена (Фиг.9)
Угловую скорость крена, умноженную на понижающий настроечный передаточный коэффициент Kd, фильтруют через фильтр верхних частот крена (1-го или 2-го порядка). Чтобы поддержать «выравнивание в соответствии с направлением силы тяжести» при определении координируемой траектории, используются поперечные качания. Для определения поперечного положения в пределах границ тренажера сигнал поперечного положения пропускают через фильтр, гасящий движение в направлении «y», в общем случае - 2-го порядка. Выходными сигналами программы являются угол φ крена тренажера и положение центроида вдоль оси «у».
Имитация поперечной удельной силы (Фиг.10)
Поперечную удельную силу, вычисляемую в гипотетическом положении центроида, умножают на понижающий настроечный передаточный коэффициент, а затем посылают через два фильтра: позиционный ' фильтр верхних частот и угловой фильтр нижних частот. Эти фильтры в большинстве случаев являются фильтрами 2-го порядка и не комплементарными. Они также могут быть адаптируемыми. И опять, выходным сигналом фильтров является «положение центроида», а не «положение пилота».
В известных пилотажных тренажерах, по меньшей мере, рыскание и крен в качестве одной степени свободы неизменно ведут себя следующим образом: когда рассматривают координированный разворот при полете только посредством входного сигнала элеронов, в начале маневра ожидается правильное восприятие пилота. Воспринимаются появление крена и появление поперечной удельной силы. Однако несколькими мгновениями позже отмечается ложная противоположная боковая удельная сила. Ощущение такое, будто летательный аппарат находится в боковом скольжении (скольжении на крыло), которого на самом деле нет.
Кроме того, во время наземных рулежных маневров корреляция между восприятием поперечного движения и визуальной информацией оказывается очень слабой. Всегда возникает впечатление бокового скольжения по взлетно-посадочной полосе.
Эти проблемы подробнее излагаются ниже.
Маневр по крену
Рассмотрим отклик движения типичного пилотажного тренажера на Фиг.11 для случая ступенчатого маневра согласно входному сигналу элеронов, показанного на Фиг.6.
Для построения графиков были использованы фильтры второго порядка, потому что они используются чаще всего. Источником единственного входного сигнала для фильтров является угловая скорость крена. Входной сигнал в фильтр боковой удельной силы отсутствует, поскольку положением центроида вдоль оси «z»
(т.е. zc ЛА) в большинстве случаев пренебрегают.
Угловое ускорение крена (Фиг.11.4) демонстрирует знак, противоположный тому, который присущ угловому ускорению крена, пропущенному через фильтр нижних частот.
Временной отклик поперечной удельной силы в базисной точке Р пилота (Фиг.11.5) демонстрирует следующие характеристики.
1°. Начальное пиковое значение верно. Это угловое ускорение обусловлено параметром  . Как говорилось выше, в информации центроида учитывается только гипотетическое положение zc ЛА центроида, а не расстояние Δ, являющееся вертикальным расстоянием между базисной точкой Р пилота и центроидом «ц», т.е. геометрическим центром тяжести платформы тренажера. Когда пилот располагается в летательном аппарате выше точки начального углового ускорения крена и когда в тренажере возбуждается крен относительно центроида, начальные поперечные удельные силы на летательном аппарате (ЛА) и тренажере (TP) приблизительно одинаковы.
. Как говорилось выше, в информации центроида учитывается только гипотетическое положение zc ЛА центроида, а не расстояние Δ, являющееся вертикальным расстоянием между базисной точкой Р пилота и центроидом «ц», т.е. геометрическим центром тяжести платформы тренажера. Когда пилот располагается в летательном аппарате выше точки начального углового ускорения крена и когда в тренажере возбуждается крен относительно центроида, начальные поперечные удельные силы на летательном аппарате (ЛА) и тренажере (TP) приблизительно одинаковы.
2°. За пиковым значением несколькими мгновениям позже следует ложная противоположная боковая удельная сила. Эта ложная сила пагубно влияет на точность воспроизведения движений пилотажным тренажером. В литературе можно найти термины «налегание, за педалями курсант, не в фазе» и т.д. (J.B.Sinacori, Northrop Corporation, "A practical approach to motion simulation", p.13, AIAA paper 73-931, сентябрь 1973 г. / Susan A. Riedel and L.G.Hofmann, Systems Technology Inc., "Investigation of nonlinear motion simulator washout schemes", p.524, p.530, Proceedings of the 14th Annual Conference on Manual Control, ноябрь 1978 / Susan A. Riedel and L.G.Hofmann, STI, "Manned engineering flight simulator validation" p.172, STI-TR-1110-1, AFFDL-TR-78-192-FT-1, февраль 1979 / David L. Quam, University of Dayton, Ohio, "Human pilot perception experiments", p.263, Proceedings of 15th Annual Conference on Manual Control, ноябрь 1979 / Irving L. Ashkenas, STI, "Collected flight and simulation comparisons and considerations", p.15-26, AGARD CP408 Flight Simulation, октябрь 1985).
Это явление целиком обусловлено присутствием показанного на Фиг.9 фильтра, гасящего движение в направлении «y». Этот фильтр, гасящий движение в направлении «y», необходим для «возврата» тренажера и тем самым введения «его» координации.
Единственный способ подавления этого явления в существующей схеме заключается в том, чтобы уменьшить понижающий настроечный передаточный коэффициент Kd до очень малых значений. Человек при этом не в состоянии воспринять какое-либо движение, тем более опосредованное движение, однако это считается меньшим злом, чем ложное движение.
Наземный рулежный маневр
Во время рулежных маневров на земле, имитируемый летательный аппарат не испытывает крен, так что главную роль играют только фильтры поперечного удельного усилия.
Искажение в воспринимаемом движении присутствует всегда. Когда используют руление посредством руля направления или носового колеса, начальный отклик ощущается (от «y»-фильтра верхних частот). Когда этот отклик замирает, от φ-фильтра нижних частот приходит сигнал испытываемого поперечного ускорения. Оба движения совершенно не смешиваются друг с другом, поскольку фильтры не являются комплементарными.
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы обеспечить надлежащую точность воспроизведения ощущений движения в пилотажных тренажерах, пилотажные тренажеры с такой надлежащей точностью воспроизведения ощущений движения и способы управления такими пилотажными тренажерами. Задача настоящего изобретения состоит в том, чтобы преодолеть, по меньшей мере, некоторые из недостатков, упомянутых выше.
Вышеописанные задачи решаются с помощью способа и устройства в соответствии с настоящим изобретением.
В первом аспекте, в изобретении предложен способ управления движениями пилотажного тренажера, приводящий к улучшенному восприятию движений пилотом, который пользуется пилотажным тренажером.
В первом варианте осуществления первого аспекта, в настоящем изобретении предложен способ управления движениями пилотажного тренажера, предусматривающими линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость крена и угловая скорость рыскания, а также удельная сила в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение и угол крена тренажера. В первом варианте осуществления, способ предусматривает вычисление угла крена тренажера в соответствии с углом крена имитируемого летательного аппарата путем коррекции первоначально вычисленного значения угла крена с коэффициентом коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения тренажера в соответствии с направлением силы тяжести Земли.
Вычисление угла крена тренажера может включать в себя использование математического преобразования, предусматривающего прямую связь угла коррекции в функции преобразования угла крена в соответствии с формулами

где φвч - угол крена тренажера, пропущенный через фильтр верхних частот;
g - постоянная силы тяжести Земли;
Ку - передаточный коэффициент поперечной координации;
φкрена - соответствует углу крена тренажера, получаемому в результате углового ускорения крена или угловой скорости крена летательного аппарата
В упомянутом математическом преобразовании можно вводить передаточный коэффициент Ку поперечной координации в интервале между 0 и 1, что позволяет уменьшить поперечное перемещение, обуславливаемое некоторой допустимой ложной поперечной удельной силой, путем модуляции в диапазоне между «отсутствием координации» (Ку=0) и «полной координацией» (Ку=1). Угол крена может быть получен с помощью фильтра верхних частот 3-го или 4-го порядка, что приводит к получению Ку=1, а поперечное ускорение можно в каждый момент времени сделать равным этому углу крена, умноженному на ускорение силы тяжести Земли.
Математическое преобразование может предусматривать фильтр верхних частот 2-го порядка и гасящий фильтр 1-го порядка в соответствии со следующими формулами передаточных функций:

где pогр - входная угловая скорость крена, ограничиваемая посредством понижающего настроечного передаточного коэффициента Kd тренажера, а по выбору - посредством функции, ограничивающей угловую скорость крена таким образом, что для ступеньки в сигнале управления элеронами боковое перемещение тренажера имеет конечное значение.
В способе, соответствующем вариантам осуществления настоящего изобретения, вторая составляющая удельной силы в поперечном направлении может быть получена посредством первого набора из двух комплементарных фильтров для углового ускорения крена и второго набора из двух комплементарных фильтров для углового ускорения рыскания. В каждом наборе комплементарных фильтров один предназначен для управления поперечным отклонением тренажера, а другой - для управления углом крена тренажера. Комплементарные фильтры могут соответствовать следующим формулам передаточных функций:

и

где pогр и rогр - входные угловая скорость крена и угловая скорость рыскания, соответственно, ограничиваемые посредством понижающих настроечных передаточных коэффициентов Kd и Кr, соответственно, а по выбору - посредством функции, ограничивающей угловую скорость.
Во втором варианте осуществления первого аспекта, в настоящем изобретении предложен способ управления движениями пилотажного тренажера, предусматривающими линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость крена и угловая скорость рыскания, а также удельная сила в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение и угол крена тренажера. Во втором варианте осуществления, способ предусматривает:
разложение удельной силы, действующей в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием, и второй член, связанный с угловыми ускорениями крена, в соответствии с формулой:

где хР ЛА - координата «х» базисной точки пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата,
a zP ЛА - координата «z» базисной точки пилота в упомянутой системе координат,  - угловое ускорение крена, а
- угловое ускорение крена, а  - угловое ускорение рыскания;
- угловое ускорение рыскания;
фильтрацию первой составляющей Аy через два фильтра - фильтр верхних частот и фильтр нижних частот;
параллельную фильтрацию каждого из членов второй составляющей с помощью набора из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице; и
использование суммы выходных сигналов фильтра верхних частот и первых из комплементарных фильтров каждого набора для вычисления желаемого поперечного положения тренажера, а также использование суммы выходных сигналов фильтра нижних частот и вторых из комплементарных фильтров каждого набора для вычисления желаемого угла крена тренажера.
В третьем варианте осуществления первого аспекта, в настоящем изобретении предложен способ управления движениями пилотажного тренажера, предусматривающими линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость крена и угловая скорость рыскания, а также удельная сила в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение и угол крена тренажера. В третьем варианте осуществления, способ предусматривает преобразование положения базисной точки пилота в тренажере, получаемого с помощью программы движения, в положение центроида тренажера либо посредством состояния согласно известному способу, либо посредством любого из способов согласно первому или второму аспекту, либо посредством их комбинации. Это может быть сделано с помощью координационного преобразования с учетом трех углов Эйлера тренажера, т.е. угла (ψ) рыскания, угла (θ) тангажа и угла (φ) крена.
Способ согласно третьему варианту осуществления может дополнительно предусматривать преобразование удельной силы, вычисленной в соответствии с моделью имитируемого летательного аппарата в фиксированной точке упомянутого летательного аппарата, в удельную силу, действующую в базисной точке пилота, в качестве входного сигнала для программы движения и последующее задание этой преобразованной удельной силы в качестве входного сигнала для программы движения и преобразование выходного сигнала программы движения с помощью локального преобразования от базисной точки пилота к положению центроида тренажера в сигналы для управления положением центроида тренажера. Первое преобразование можно проводить посредством математических преобразований, преобразующих удельные силы в упомянутой фиксированной точке к базисной точке Р пилота в соответствии со следующими формулами:

Сигналы движения для управления положением центроида платформы тренажера можно получать из положения базисной точки Р пилота, соответствующей выходному сигналу программы движения, в соответствии со следующими формулами:

где

Для составляющей yц центроида можно заменить вышеуказанные уравнения следующим упрощенным уравнением:
где Δ - вертикальное расстояние между базисной точкой пилота и центроидом тренажера, а φ - угол крена.
Первый, второй и третий варианты осуществления первого аспекта и их зависимые признаки могут быть отдельными вариантами осуществления или могут быть объединены друг с другом.
В вариантах осуществления настоящего изобретения, фиксированной точкой имитируемого летательного аппарата может быть центр тяжести упомянутого имитируемого летательного аппарата. Альтернативными точками, используемыми в качестве упомянутой фиксированной точки, могут быть другие фиксированные точки в летательном аппарате по соседству с центром тяжести.
Во втором аспекте, в изобретении предложен компьютерный программный продукт для осуществления способов, заявляемых в любом из предшествующих пунктов формулы изобретения, при осуществлении этого способа на компьютерном устройстве, связанном с пилотажным тренажером, имитирующим летательный аппарат. Этот компьютерный программный продукт обеспечивает функциональные возможности согласно любому из вышеописанных способов в соответствии с настоящим изобретением при его осуществлении на компьютерном устройстве, связанном с пилотажным тренажером. Компьютерная программа может быть частью продукта программного обеспечения компьютера (например, может находиться на программоносителе), который включает в себя один или более кодовых сегментов, обуславливающих выполнение этапов способа процессором, таким как центральный процессор обрабатывающей системы. Программа работает под управлением операционной системы и может включать в себя пользовательский интерфейс, который гарантирует пользователю взаимодействие с программой. Программа пилотажного тренажера работает с входными данными, например с заранее заданной схемой полета, и генерирует данные управления, предназначенные для управления движениями платформы пилотажного тренажера.
В третьем аспекте, в настоящем изобретении предложено считываемое компьютером устройство для хранения данных или программоноситель, которое или который хранит компьютерный программный продукт согласно настоящему изобретению в машиночитаемой форме и которое или который осуществляет, по меньшей мере, один из способов согласно изобретению, когда он осуществляется на компьютерном устройстве. В настоящее время такое программное обеспечение часто предлагается по сети Internet или внутрикорпоративной сети на базе технологии Internet для загрузки, поэтому настоящее изобретение предусматривает передачу компьютерного программного продукта в соответствии с настоящим изобретением через локальную или глобальную вычислительную сеть. Вычислительное устройство может включать в себя либо микропроцессор, либо FPGA - вентильную матрицу, программируемую во время эксплуатации.
В том смысле, в каком они употребляются в данном описании, термины «программоноситель» и «машиночитаемый носитель информации» относятся к любому носителю информации, который принимает участие в выдаче команд в процессор для исполнения. Такой носитель информации может принимать многие формы, включая, но не в ограничительном смысле, энергонезависимые носители информации, энергозависимые носители информации и среды передачи информации. Энергонезависимые носители информации включают в себя динамическое запоминающее устройство, такое как оперативное запоминающее устройство (ОЗУ). Среды передачи включают в себя коаксиальные кабели, медный провод и волоконную оптику, в том числе провода, которые представляют собой шину внутри компьютера. Среды передачи также могут принимать форму акустических или световых волн, таких как генерируемые во время обмена данными в диапазоне радиоволн и инфракрасных волн.
Распространенные формы считываемых компьютером носителем включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту или любой другой магнитный носитель информации, CD-ROM, любой другой оптический носитель информации, перфокарты, бумажные ленты, любой другой материальный носитель информации с рисунками отверстий, ОЗУ, программируемое постоянное запоминающее устройство (ППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ), СППЗУ типа флэш-памяти, любую другую запоминающую микросхему или картридж, несущую волну, как описано выше, или любой другой носитель информации, с которого возможно считывание компьютером.
При переносе одной или нескольких последовательностей одной или нескольких команд в процессор для исполнения можно задействовать считываемые компьютером носители, представленные в разных формах. Например, команды могут быть изначально размещены на магнитном диске удаленного компьютера. Удаленный компьютер может загружать команды в свое динамическое запоминающее устройство и посылать эти команды по телефонной линии, пользуясь модемом. Модем, локальный по отношению к компьютерной системе для управления платформой тренажера, может принимать данные по этой телефонной линии и использовать передатчик инфракрасного излучения для преобразования данных в сигнал инфракрасного излучения. Детектор инфракрасного излучения, подключенный к шине, может принимать данные, переносимые в сигнале инфракрасного излучения, и размещать эти данные на шине. Шина переносит данные в основное запоминающее устройство, из которого процессор выбирает команды и выполняет их. Команды, принимаемые основным запоминающим устройством, можно, по выбору, сохранять в некотором запоминающем устройстве либо перед их выполнением процессором, либо после такого выполнения. Команды можно также передавать посредством несущей волны в сети, такой как локальная вычислительная сеть (ЛВС), глобальная вычислительная сеть (ГВС) или объединенная сеть. Среды передачи могут принимать форму акустических или световых волн, таких как генерируемые во время обмена данными в диапазоне радиоволн и инфракрасных волн. Среды передачи включают в себя коаксиальные кабели, медный провод и волоконную оптику, в том числе провода, которые образуют шину внутри компьютера.
В еще одном аспекте, в настоящем изобретении предложен контроллер для управления движениями пилотажного тренажера, предусматривающими линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость крена и угловая скорость рыскания, а также удельная сила в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение и угол крена тренажера,
при этом контроллер содержит любые компоненты из таких, как:
первый вычислительный блок, выполненный с возможностью вычисления угла крена тренажера, обуславливаемого углом крена имитируемого летательного аппарата, путем коррекции первоначально вычисленного значения угла крена с коэффициентом коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения тренажера в соответствии с направлением силы тяжести Земли,
и/или.
второй вычислительный блок, выполненный с возможностью разложения удельной силы, действующей в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием, и второй член, связанный с угловыми ускорениями крена, в соответствии с формулой:

где хР ЛА - координата «х» базисной точки пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата,
a zP ЛА - координата «z» базисной точки пилота в упомянутой системе координат,  - угловое ускорение крена, а
- угловое ускорение крена, а  - угловое ускорение рыскания;
- угловое ускорение рыскания;
фильтр верхних частот и фильтр нижних частот для фильтрации первой составляющей Аy;
два набора, каждый из которых состоит из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице, для параллельной фильтрации каждого из членов второй составляющей; и
сумматор для суммирования выходного сигнала фильтра верхних частот и выходных сигналов первых из комплементарных фильтров каждого набора для вычисления желаемого поперечного положения тренажера, а также сумматор для суммирования выходного сигнала фильтра нижних частот и выходных сигналов вторых из комплементарных фильтров каждого набора для вычисления желаемого угла крена тренажера,
и/или
блок преобразования, предназначенный для преобразования положения базисной точки пилота в тренажере, получаемого с помощью программы движения, в положение центроида тренажера либо посредством состояния согласно известному способу, либо посредством любого из способов согласно первому или второму аспекту, либо посредством их комбинации.
В еще одном аспекте, в настоящем изобретении предложен пилотажный тренажер, выполненный с возможностью совершения управляемых движений, предусматривающих линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость крена и угловая скорость рыскания, а также удельная сила в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение и угол крена тренажера,
при этом пилотажный тренажер содержит любые компоненты из таких, как:
первый вычислительный блок, выполненный с возможностью вычисления угла крена тренажера, обуславливаемого углом крена имитируемого летательного аппарата, путем коррекции первоначально вычисленного значения угла крена с коэффициентом коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения тренажера в соответствии с направлением силы тяжести Земли,
и/или
второй вычислительный блок, выполненный с возможностью разложения удельной силы, действующей в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием, и второй член, связанный с угловыми ускорениями крена, в соответствии с формулой:

где хР ЛА - координата «х» базисной точки пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата,
a zP ЛА - координата «z» базисной точки пилота в упомянутой системе координат,  - угловое ускорение крена, а
- угловое ускорение крена, а  - угловое ускорение рыскания;
- угловое ускорение рыскания;
фильтр верхних частот и фильтр нижних частот для фильтрации первой составляющей Аy;
два набора, каждый из которых состоит из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице, для параллельной фильтрации каждого из членов второй составляющей; и
сумматор для суммирования выходного сигнала фильтра верхних частот и выходных сигналов первых из комплементарных фильтров каждого набора для вычисления желаемого поперечного положения тренажера, а также сумматор для суммирования выходного сигнала фильтра нижних частот и выходных сигналов вторых из комплементарных фильтров каждого набора для вычисления желаемого угла крена тренажера,
и/или
блок преобразования, предназначенный для преобразования положения базисной точки пилота в тренажере, получаемого с помощью программы движения, в положение центроида тренажера либо посредством состояния согласно известному способу, либо посредством любого из способов согласно первому или второму аспекту, либо посредством их комбинации.
Конкретные и предпочтительные аспекты изобретения приведены в прилагаемых независимых и зависимых пунктах формулы изобретения. Признаки из зависимых пунктов формулы изобретения могут быть объединены с признаками независимых пунктов формулы изобретения и с признаками других зависимых пунктов формулы изобретения подходящим образом, а не только так, как буквально изложено в формуле изобретения.
Предполагается, что эти концепции представляют собой существенно новые, неизвестные ранее усовершенствования, предусматривающие выход за рамки общепринятых практических методик, а это приводит к повышенной точности воспроизведения ощущений движения во время маневров в поперечном направлении на земле и в воздухе.
Положения настоящего изобретения позволяют проектировать пилотажные тренажеры и способы управления пилотажными тренажерами.
Вышеуказанные и другие характеристики, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описания, приводимого в связи с прилагаемыми чертежами, которые иллюстрируют на примерах принципы изобретения. Это описание приводится лишь в качестве примера, ни в коей мере не ограничивающего объем притязаний изобретения. Позиции, цитируемые ниже, относятся к прилагаемым чертежам.
Краткое описание чертежей
Фиг.1: Система координат летательного аппарата.
Фиг.2: Фиксированная платформа системы координат тренажера:
1: центроид тренажера;
2: верхняя подвижная платформа;
3: нижняя подвижная платформа.
Фиг.3: Система координат подвижных платформ:
1: исходное положение центроида;
2: движущийся центроид;
3: верхняя подвижная платформа в покое;
4: верхняя подвижная платформа в движении;
5: нижняя подвижная платформа.
Фиг.4: Базисная точка пилота - центроид платформы центр тяжести (ц.т.) летательного аппарата:
1: летательный аппарат;
2: тренажер в гипотетическом месте;
Р: базисная точка пилота;
ц: центроид;
ц.т.: центр тяжести;
координаты базисной точки пилота относительно ц.т. летательного аппарата:

координаты базисной точки пилота относительно ц.т. летательного аппарата:

координаты центроида относительно ц.т. летательного аппарата:

Фиг.5: Удельная сила в направлении «у» в точке Р подвижной платформы:
1: подвижная платформа.
Фиг.6: Изменение положений платформы во времени для ступеньки в элероне:
6.1: входной сигнал элерона (°);
6.2: угловая скорость крена (°/сек);
6.3: угловое ускорение крена (°/сек2).
Фиг.7: Мгновенная ось крена, обуславливаемая входным сигналом элеронов:
1: летательный аппарат;
2: мгновенная ось крена.
Фиг.8: Блок-схема «классических преобразований».
Фиг.9: Классические фильтры, канал крена.
Фиг.10: Классические фильтры, канал поперечных удельных сил.
Фиг.11: Классические фильтры изменений положений пилотажного тренажера во времени:
11.1: поперечное положение (м) центроида;
11.2: поперечное ускорение (м/сек2) центроида;
11.3: угол крена (°);
11.4: угловое ускорение крена (°/сек2);
11.5: удельная сила Аy Р (м/сек2).
Фиг.12: Блок-схема «корректируемых» преобразований в соответствии с вариантом осуществления настоящего изобретения.
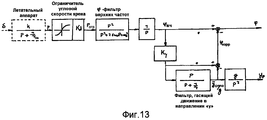
Фиг.13: Канал крена с введением φкорр в соответствии с вариантом осуществления настоящего изобретения.
Фиг.14: Канал боковой удельной силы с разложением Аy и комплементарными фильтрами в соответствии с вариантом осуществления настоящего изобретения:
1: комплементарные фильтры: Аy пилота, обусловленная угловым ускорением крена;
2: комплементарные фильтры: Аy пилота, обусловленная угловым ускорением рыскания.
Фиг.15: Изменения положений пилотажного тренажера во времени с использованием «опережающей подачи» φкорр в соответствии с вариантом осуществления настоящего изобретения:
15.1: поперечное положение (м) точки Р;
15.2: поперечное ускорение (м/сек2) точки Р;
15.3: угол крена (°);
15.4: угловое ускорение крена (°/сек2);
15.5: удельная сила Аy Р (м/сек2).
Фиг.16: Изменения положений пилотажного тренажера полностью согласно новой концепции для Кy=1 в соответствии с вариантом осуществления настоящего изобретения:
16.1: поперечное положение (м) точки Р;
16.2: поперечное ускорение (м/сек2) точки Р;
16.3: угол крена (°);
16.4: угловое ускорение крена (°/сек2);
16.5: удельная сила Аy Р (м/сек2).
Фиг.17: Изменения положений пилотажного тренажера полностью согласно новой концепции для Ку=0,8 в соответствии с вариантом осуществления настоящего изобретения:
17.1: поперечное положение (м) точки Р;
17.2: поперечное ускорение (м/сек2) точки Р;
17.3: угол крена (°);
17.4: угловое ускорение крена (°/сек2);
17.5: удельная сила Аy Р (м/сек2).
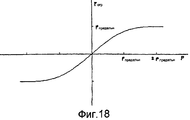
Фиг.18: Пример функции, ограничивающей угловую скорость крена, в соответствии с вариантом осуществления настоящего изобретения.
Фиг.19: Изображение компьютерной системы для использования с настоящим изобретением.
Фиг.20: Изображение пилотажного тренажера.
Осуществление изобретения
Настоящее изобретение будет описано применительно к конкретным вариантам осуществления и со ссылками на прилагаемые чертежи, но изобретение ограничивается не этим, а только прилагаемой формулой изобретения. Описываемые чертежи являются условными и не носят ограничительный характер. В иллюстративных целях размеры некоторых элементов на чертежах могут быть преднамеренно увеличены и представлены не в масштабе. Эти размеры и относительные размеры не соответствуют реальным уменьшенным копиям вариантов практической реализации изобретения.
Кроме того, термины «первый», «второй», «третий» и т.п. употребляются в описании и формуле изобретения для установления различий между аналогичными элементами и не являются обязательными для описания последовательного или
хронологического порядка. Следует понять, что употребляемые таким образом термины являются взаимозаменяемыми в подходящих обстоятельствах и что описываемые здесь варианты осуществления изобретения могут работать в последовательностях, отличающихся от описываемых здесь.
Необходимо отметить, что не следует интерпретировать термин «содержащий» («содержащее»), употребляемый в формуле изобретения, как ограничивающий перечисляемые после него средства; он не исключает другие элементы или этапы. Таким образом, его следует интерпретировать как указывающий наличие излагаемых признаков, цельных узлов, этапов или компонентов, к которым он относится, а не исключающий наличие или добавление одного или нескольких других признаков, цельных узлов, этапов или компонентов либо их групп. Таким образом, объем выражения «устройство, содержащее средства А и В» не следует ограничивать устройствами, состоящими только из компонентов А и В. Это выражение в контексте настоящего изобретения означает, что единственными релевантными компонентами упомянутого устройства являются А и В.
Определения и аннотации
Нижеследующие термины представлены просто для того, чтобы способствовать пониманию изобретения. Эти определения не следует считать имеющими объем меньший, чем тот, который понятен обычному специалисту в данной области техники.
ЛА летательный аппарат
А матрица направляющих косинусов
Аx составляющая удельной силы вдоль оси «х»
Аy составляющая удельной силы вдоль оси «у»
Az составляющая удельной силы вдоль оси «z»
Ау центроида Ау в гипотетическом месте нахождения центроида по отношению к системе координат ЛА
Ау ц.т. Ау в ц.т. ЛА
Ау пилота Ау пилота по отношению к системе координат ЛА
Ау Р Ау в базисной точке Р пилота в тренажере
Ц центроид - геометрический центр тяжести движущейся платформы
ц.т. центр тяжести
d расстояние между Р и осью углового ускорения крена
g ускорение силы тяжести Земли - 9,81 м/сек2
k передаточное отношение
Kd понижающий настроечный передаточный коэффициент в канале крена
Кр понижающий настроечный передаточный коэффициент в канале Ау, входной сигнал крена
Кr понижающий настроечный передаточный коэффициент в канале Ау, входной сигнал рыскания
Квч понижающий настроечный передаточный коэффициент классического «у»-фильтра верхних частот
Кнч понижающее настроечное передаточное отношение классического «у»-фильтра нижних частот
Ку передаточный коэффициент поперечной координации
Р угловая скорость крена
Р оператор Лапласа (означает: d/dt); базисная точка пилота
рпред предел угловой скорости крена
рогр ограниченная угловая скорость крена
q угловая скорость тангажа
r угловая скорость рыскания
rпред предел угловой скорости рыскания
rогр ограниченная угловая скорость рыскания
хс ЛА координата «х» центроида в системе отсчета ЛА
zc ЛА координата «z» центроида в системе отсчета ЛА
хР ЛА координата «х» точки Р в системе отсчета ЛА
zP ЛА координата «z» точки Р в системе отсчета ЛА
хР ц координата «х» точки Р в системе подвижной платформы
zP ц координата «z» точки Р в системе подвижной платформы
у координата «у»
у-ц координата «у» центроида в системе отсчета фиксированной платформы
у-р координата «у» точки Р в системе отсчета фиксированной платформы
δ отклонение (градусы) штурвала управления
ψ угол рыскания
θ угол тангажа
φ угол крена
φвч фильтр верхних частот угла крена
φкорр новая концепция коррекции угла крена
Δ вертикальное расстояние между базисной точкой Р пилота и центроидом «ц» платформы
τ постоянная времени (сек)
ω круговая частота (рад/сек)
ξ декремент затухания
сn коэффициент момента рыскания
ci коэффициент момента крена
cnδ=∂cn/∂δ
сiδ=∂сi/∂δ
Системы отсчета
Все системы отсчета являются правыми, и в них ось «х» обращена вверх, ось «у» - вправо, а ось «z» - вниз.
На Фиг.1 изображена система отсчета летательного аппарата, имеющая начало в фиксированной точке, например в центре тяжести. На Фиг.2 изображена система отсчета фиксированной платформы, имеющая начало в исходном положении центроида. На Фиг.3 показана система координат подвижной платформы, имеющая начало в центроиде.
Базисная точка Р пилота (Фиг.4)
Точка, где, согласно допущению, происходит восприятие движения. Движение воспринимается через посредство полукруглых каналов внутреннего уха. Вместе с тем, имеет место также тактильное восприятие движения (также называемое «центром пульсаций»). Поэтому предполагается, что точка Р находится между 2-мя пилотами на половине высоты между их головой и подушкой кресла. В типичном пилотажном тренажере расстояние Δ между базисной точкой Р пилота и центроидом «ц» тренажера составляет от 1,00 до 1,75 м.
Удельная сила (м/сек2)
Удельная сила в заданном направлении равна линейному ускорению, которое можно было бы измерить линейным акселерометром в этом направлении. Она равна векторной разности между кинематическим ускорением и ускорением, обусловленным силой тяжести. Удельная сила (Аy Р) в заданной точке Р на подвижной платформе состоит из 3-х составляющих: ускорения центроида ( ), ускорения, обусловленного угловым ускорением, и составляющей, обусловленной силой тяжести:
), ускорения, обусловленного угловым ускорением, и составляющей, обусловленной силой тяжести:
Модель летательного аппарата в полете
В соответствии с первоисточником Н.Wittenberg, Technische Hogeschool Delft, "Elementaire beschouwing over de samenhang tussen besturing, stabiliteit en demping bij vliegtuigen", Memorandum M-319, октябрь 1979, с.5-7), используется приближение первого порядка со следующей передаточной функцией:

Это хорошее приближение для ситуации координированных разворотов (удельная сила вдоль оси «у» в ц.т. летательного аппарата отсутствует).
На Фиг.6 показан отклик летательного аппарата для ступеньки элерона самолета В737-300 в конфигурации сближения, τЛА=0,67 сек.
Следует отметить, что все изменения во времени вычислены для периода 10 секунд.
Угловая скорость крена (Фиг.6.2) асимптотически приближается к своему конечному значению, тогда как угловое ускорение крена (Фиг.6.3) демонстрирует начальное пиковое значение, затухающее до нуля.
Следует отметить, что поперечная удельная сила в базисной точке Р пилота проявляет точно такие же характеристики, как угловое ускорение крена, показанное на Фиг.6.3: если хР ЛА и zP ЛА - координаты точки Р (Фиг.4) в системе отсчета ЛА, то в соответствии с первоисточником О.Н.Gerlach, Technische Hogeschool Delft, "Vliegeigenschappen 1", Dictaat D 26, октябрь-ноябрь 1981, стр.227, можно показать, что

Для малых угловых скоростей:

Поперечная удельная сила в результате углового ускорения крена имеет вид:

Следует отметить, что если предполагается, что элерон не только вызывает крен, но также и момент рыскания, то  . В этом случае плечо d рычага для вычисления поперечной удельной силы вследствие углового ускорения может быть вычислено следующим образом (Фиг.7):
. В этом случае плечо d рычага для вычисления поперечной удельной силы вследствие углового ускорения может быть вычислено следующим образом (Фиг.7):
Если сnδ и Ciδ известны (например, в виде функции угла атаки), то это значение можно использовать вместе zP ЛА.
Теперь изобретение будет описано посредством подробного описания нескольких вариантов осуществления изобретения. Очевидно, что в соответствии со знаниями специалистов в данной области техники можно конфигурировать другие варианты осуществления изобретения, не выходя при этом за рамки существа или технических параметров изобретения, а само изобретения ограничивается лишь терминами прилагаемой формулы изобретения.
Платформа тренажера может иметь хорошо известную конструкцию. Вариант осуществления такой платформы тренажера проиллюстрирован на Фиг.20. Настоящее изобретение также применимо к любой конструкции, имеющей, по меньшей мере, перечисленные ниже степени свободы: поперечное перемещение (качание) и угол крена. Только управление по этим степеням свободы адаптируется в соответствии с вариантами осуществления настоящего изобретения.
Новая концепция движения в соответствии с вариантами осуществления настоящего изобретения основана на трех фундаментальных изменениях или их комбинации:
1°) Фиг.12: Фиг.12: корректируемые преобразования центроида;
2°) Фиг.13: введение φкорр в канале крена;
3°) Фиг.14: разложение Ау и введение комплементарных фильтров.
Корректируемые преобразования центроида (Фиг.12)
Преобразование центроида, описанное ранее (в разделе «Предшествующий уровень техники»), содержит важную погрешность. Поскольку движения платформы представляют собой отфильтрованные движения центроида «ц», а базисная точка Р пилота не находится в центроиде «ц», то в базисной точке Р пилота создаются ложные ускорения из-за существующей комбинации угловых ускорений платформы и расстояния, существующего в направлениях «z» и «х» между центроидом «ц» и базисной точкой Р пилота.
Поэтому, в соответствии с вариантом осуществления настоящего изобретения, улучшенные преобразования являются следующими.
1°) Вычислять удельные силы, действующие на ЛА, нужно не в гипотетическом месте «ц» нахождения центроида (как на Фиг.8), а в базисной точке Р пилота (Фиг.12):

2°) Эти сигналы надлежит использовать вместе с угловыми скоростями в качестве входных сигналов для программы движения тренажера.
3°) Три выходных сигнала положения  выдаваемые программой движения, следует рассматривать как управляемое положение базисной точки Р пилота. Эти сигналы следует преобразовать в управляемые положения центроида следующим образом.
выдаваемые программой движения, следует рассматривать как управляемое положение базисной точки Р пилота. Эти сигналы следует преобразовать в управляемые положения центроида следующим образом.
Пусть координаты базисной точки Р пилота по отношению к системе отсчета подвижной платформы имеют вид:
В соответствии с первоисточником Filip Van Biervliet, Technische Hogeschool Delft, "Ontwerp en evaluatie van stuurcommandosysteemregelwetten met de quickened display methode", bijlage 2 Ingenieursverslag, март 1982, между координатами точек Р и «ц» в системе отсчета фиксированной платформы поддерживается нижеследующее соотношение:

При этом А - матрица направляющих косинусов:

В результате:

В направлении «у» имеем:
Учитывая только влияние zPц и предполагая малые значения ψ, θ и φ, получаем:

Введение φкорр в канале крена, Фиг.13
Рассмотрим Фиг.13 в сравнении с Фиг.9. Эта компоновка фильтров предназначена для имитации угловых ускорений крена при сниженных или отсутствующих ложных поперечных удельных силах в соответствии с вариантом осуществления настоящего изобретения.
Новой особенностью этой схемы является опережающая подача значения φкорр коррекции угла крена в канал крена. Значение φкорр коррекции угла крена пропорционально ложной поперечной удельной силе, вносимой фильтром, гасящим движение в направлении «у». Это низкочастотный сигнал. С физической точки зрения это означает, что платформа наклоняется назад пропорционально своему линейному замедлению (во многом точно так же, как в случае, когда официанту, вынужденному неожиданно остановиться, приходится наклонять свой поднос назад, чтобы не уронить стоящие на нем бокалы с напитками).
Передаточный коэффициент Ку поперечной координации (между 0 и 1) имеет смысл уменьшения поперечного качания тренажера.
Это следуют из такой схемы вычислений:

Это значит, что если передаточный коэффициент поперечной координации Ку=1, то направленная вдоль оси «у» составляющая удельной силы Аy=0, что означает полную координацию.
На Фиг.15 показан временной отклик для Ку=1. Он недвусмысленно показывает, что Аy=0. Вместе с тем, можно также заметить, что имеется несколько большее искажение в угловом ускорении крена (сравните Фиг.11.4 и Фиг.15.4).
Если Ку=1, то очевидно, что те два тракта сигнала на Фиг.13, которые обозначены звездочкой, подавляют друг друга. Это означает, что можно урезать сложный φ-фильтр до φ-фильтра верхних частот, соединенного последовательно с фильтром, гасящим движение в направлении «у».
Это также является причиной, по которой фильтр, гасящий движение в направлении «у», предпочтительно выбирают как фильтр 1-го порядка, а не 2-го или более высокого порядка. Таким образом, сложный фильтр является фильтром 3-го порядка, а не 4-го порядка. Сложный φ-фильтр 4-го или более высокого порядка привел бы к еще большему искажению углового ускорения крена.
Уменьшение Ку до 0,7 или 0,8 уменьшает поперечную координацию; вместе с тем, это также приводит к меньшему искажению углового ускорения крена.
С помощью теоремы Лапласа «о конечном значении» можно показать, что отклик ступеньки имеет вид:
Это означает, что постоянная угловая скорость крена (возникающая из-за постоянного входного сигнала элеронов) приводит к постоянному смещению тренажера. Если бы порядок сложного фильтра, представляющий собой сумму порядков φ-фильтра верхних частот и фильтра, гасящего движение в направлении «у», был 4-м порядком или более высоким порядком, то

Таким образом, второе преимущество выбора сложного фильтра 3-го порядка, φ-фильтра верхних частот 2-го порядка и фильтра, гасящего движение в направлении «у», 1-го порядка или φ-фильтра верхних частот 1-го порядка и фильтра, гасящего движение в направлении «у», 2-го порядка заключается в том, что теперь после маневра тренажер готов к восприятию следующего маневра, т.е. обеспечивается возврат элеронов в нейтральное или противоположное положение.
Разложение Аy и введение комплементарных фильтров, Фиг.14
Поперечная удельная сила в кресле пилота в летательном аппарате представляет собой сумму поперечной удельной силы в фиксированной точке летательного аппарата, например в его центре тяжести, и ускорений, обусловленных положением пилота выше и спереди от этой фиксированной точки, т.е. центра тяжести, в соответствии с вышеуказанными формулами.
Приемлемое приближение поперечной удельной силы уже задано в предыдущем разделе, где рассматривалось только ускорение, обусловленное только угловым ускорением:

Можно показать, что комплементарные фильтры 2-го порядка нельзя использовать для сложного сигнала или для Ау в ц.т. Вместе с тем, при наличии сигналов р и r (которые представляют собой интегралы ускорений), их можно использовать в соответствии с вариантами осуществления настоящего изобретения в качестве входных сигналов в комплементарные фильтры 2-го порядка. Это показано на Фиг.14. Через классические фильтры по-прежнему посылается только поперечная удельная сила в фиксированной точке, например в центре тяжести.
Термин «комплементарные» (фильтры) означает, что сумма их передаточных функций равна 1, иными словами, входной сигнал считается представляющим их полное частотное содержимое. Начальный момент задается с поперечным смещением на нижних частотах по углу крена. Например, для удельной силы, обусловленной угловым ускорением крена:
таким образом

Также следует отметить, что для классического летательного аппарата zР ЛА<0.
С помощью теоремы Лапласа «о начальном значении» можно показать, что

Это означает, что положительная ступенька в угловом ускорении (крена или рыскания) ЛА приводит к имеющему отрицательную ступеньку отклику углового ускорения тренажера. В случае имитации только маневра по крену, угловое ускорение крена в результате моделирования удельной силы уменьшает отклик углового ускорения крена из схемы отработки крена (Фиг.13). Поэтому важно выбрать ω1 как можно меньшего порядка, чтобы как можно больше уменьшить этот эффект.
Снова пользуясь теоремой Лапласа «о конечном значении», находим:

Это означает, что заданная угловая скорость крена или рыскания приведет к некоторому конечному поперечному положению тренажера. Отличительным преимуществом этого способа разложения сигнала и использования фильтров является то, что настройку этих фильтров можно адаптировать к типичным маневрам: фильтр рыскания можно адаптировать для ситуаций руления и отказа двигателя, фильтр крена - для ситуаций координированного разворота в сочетании с концепцией коррекции угла крена (введения φкорр).
Следует отметить, что положения и углы, поступающие из «канала крена» (Фиг.13) и «фильтров удельной силы Ау» (Фиг.14) приходится складывать друг с другом, чтобы получить суммарные положение и угол. Поскольку это происходит в положении базисной точки Р пилота, в соответствии с вариантами осуществления настоящего изобретения предпочтительно приводить эти параметры к положению центроида в соответствии с вышеуказанным уравнением (Фиг.12).
Обсуждение результатов
Маневр по крену
На Фиг.16 и 17 приведены несколько соответствующих общей концепции изменений во времени согласно вариантам осуществления настоящего изобретения, т.е. комбинация корректируемых преобразований центроида, введения коррекции угла крена и разложения Ау и добавления комплементарных фильтров. Максимальное поперечное перемещение выбрано равным типичному значению 1,20 м. Были сделаны следующие наблюдения.
1°) Если выбирают Ку=1 (Фиг.16), то восприятие Ау поперечной боковой силы в базисной точке Р пилота в тренажере точно пропорционально (передаточное отношение Kd) значению этой силы в летательном аппарате (Фиг.16.5).
2°) Если выбирают несколько меньшее Ку, например Ку=0,8 (Фиг.17), то происходит некоторое искажении сигнала Ау (Фиг.17.5), и при этом требуемое поперечное перемещение уменьшается (на Фиг.17.1 по сравнению с Фиг.16.1), а отклик углового ускорения крена φ немного увеличивается (на Фиг.17.4 по сравнению с Фиг.16.4).
Чтобы максимальное допустимое для тренажера значение никогда не превышалось, в соответствии с вариантами осуществления настоящего изобретения можно ввести функцию, ограничивающую угловую скорость (Фиг.18):

Вторая производная этой функции по времени непрерывна.
Наземный рулежный маневр
Изменения во времени не предусматриваются.
В частности, при пониженных скоростях руления Ау в ц.т. имеет «низкочастотный характер», т.е. в боковых силах, действующих на пневматические шины основных (передних) колес, резких изменений нет. Следовательно, при таких скоростях выгоды от применения этой схемы окажутся наибольшими.
Вышеописанные варианты осуществления способа согласно настоящему изобретению можно воплотить в обрабатывающей системе 1500, такой как показанная на Фиг.19. На Фиг.19 показана одна конфигурация обрабатывающей системы 1500, которая включает в себя, по меньшей мере, один программируемый процессор 1503, подключенный к запоминающей подсистеме 1505, которая включает в себя запоминающее устройство, воплощенное, по меньшей мере, в одной из таких форм, как ОЗУ, ПЗУ и т.д. Можно предусмотреть и хранящую подсистему 1507, которая имеет, по меньшей мере, один дисковод для жестких дисков, и/или один дисковод для CD-ROM, и/или один дисковод для цифровых универсальных дисков (DVD). В некоторых воплощениях можно предусмотреть в качестве части подсистемы 1509 пользовательского интерфейса отображающую систему, клавиатуру и указательное устройство, дающие пользователю возможность вводить информацию вручную. Можно также предусмотреть порты для ввода и вывода данных. Возможно наличие и дополнительных элементов, таких как сетевые соединения, интерфейсы для различных устройств и т.п., но они не показаны на Фиг.19. Различные элементы обрабатывающей системы 1500 могут быть соединены по-разному, включая соединения посредством подсистемы 1513 шин, которая для простоты показана на Фиг.19 в виде одной-единственной шины, но специалистам в данной области техники должно быть ясно, что можно предусмотреть систему, имеющую, по меньшей мере, одну шину. Запоминающие устройство запоминающей подсистемы 1505 может в течение некоторого момента времени содержать часть набора команд, которые при их выполнении на обрабатывающей системе 1500 воплощают этап(ы) описанных здесь вариантов осуществления способа, или весь такой набор (для любого из двух случаев это показано посредством позиции 1511). Таким образом, хотя обрабатывающая система 1500, такая как показанная на Фиг.19, известна, система, которая включает в себя команды для воплощения аспектов настоящего изобретения, не известна, и поэтому Фиг.19 не обозначена, как отображающая известный уровень техники.
Следует отметить, процессор 1503 или процессоры может или могут быть процессором или процессорами общего назначения, процессором или процессорами специального назначения, а его или их назначением может быть включение в состав некоторого устройства, например микросхемы, которая имеет другие компоненты, выполняющие другие функции. Таким образом, один или несколько аспектов настоящего изобретения можно воплотить в цифровых электронных схемах или в компьютерных аппаратных средствах, программно-аппаратных средствах, программных средствах или их комбинациях. Кроме того, аспекты изобретения можно реализовать с помощью программируемого процессора, выполняющего команды, позволяющие выполнить функции этих аспектов изобретения, например, путем выполнения операций над входными данными и генерирования выходных данных.
Вышеописанная обрабатывающая система может быть предназначена для использования в пилотажном тренажере, например, таком, как показанный на Фиг.20.
Следует понять, что хотя здесь рассмотрены предпочтительные варианты осуществления способов и устройств, соответствующих настоящему изобретению, в рамках объема притязаний и существа этого изобретения возможно проведение изменений или модификаций в его форме и деталях.
Claims (11)
1. Способ управления движениями пилотажного тренажера, предусматривающими линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость (р) крена и угловая скорость (r) рыскания, а также удельная сила (Ау) в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение (у) и угол (φ) крена тренажера, отличающийся тем, что включает в себя этапы, на которых:
вычисляют угол (φ) крена тренажера в соответствии с углом крена имитируемого летательного аппарата путем коррекции первоначально вычисленного значения (φвч) угла (φ) крена с коэффициентом (φкорр) коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения (у) тренажера в соответствии с направлением силы тяжести Земли, и/или
разлагают удельную силу (Ау пилота), действующую в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой (Ау) в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием (r), и второй член, связанный с угловыми ускорениями крена (р), в соответствии с формулой:

где хрЛА - координата «х» базисной точки пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата, а zрЛА - координата «z» базисной точки пилота в упомянутой системе координат, - угловое ускорение крена, а
- угловое ускорение крена, а  - угловое ускорение рыскания;
- угловое ускорение рыскания;
фильтруют первую составляющую (Ау) посредством двух фильтров: фильтр верхних частот и фильтр нижних частот;
параллельно фильтруют каждый из членов второй составляющей с помощью набора из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице,
используют сумму выходного сигнала фильтра верхних частот и выходных сигналов первых комплементарных фильтров каждого набора для вычисления желаемого поперечного положения (у) тренажера, а также используют сумму выходного сигнала фильтра нижних частот и выходных сигналов вторых комплементарных фильтров каждого набора для вычисления желаемого угла (φ) крена тренажера.
вычисляют угол (φ) крена тренажера в соответствии с углом крена имитируемого летательного аппарата путем коррекции первоначально вычисленного значения (φвч) угла (φ) крена с коэффициентом (φкорр) коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения (у) тренажера в соответствии с направлением силы тяжести Земли, и/или
разлагают удельную силу (Ау пилота), действующую в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой (Ау) в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием (r), и второй член, связанный с угловыми ускорениями крена (р), в соответствии с формулой:
где хрЛА - координата «х» базисной точки пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата, а zрЛА - координата «z» базисной точки пилота в упомянутой системе координат,
фильтруют первую составляющую (Ау) посредством двух фильтров: фильтр верхних частот и фильтр нижних частот;
параллельно фильтруют каждый из членов второй составляющей с помощью набора из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице,
используют сумму выходного сигнала фильтра верхних частот и выходных сигналов первых комплементарных фильтров каждого набора для вычисления желаемого поперечного положения (у) тренажера, а также используют сумму выходного сигнала фильтра нижних частот и выходных сигналов вторых комплементарных фильтров каждого набора для вычисления желаемого угла (φ) крена тренажера.
2. Способ по п.1, отличающийся тем, что вычисление угла крена (φкрена) тренажера включает в себя использование математического преобразования, предусматривающего опережающую подачу угла коррекции (φкорр), в функции преобразования угла крена в соответствии с формулами:

где φвч - угол крена тренажера, пропущенный через фильтр верхних частот;
 - ускорение поперечного положения базисной точки Р пилота, являющееся результатом перемножения φвч с коэффициентом усиления Ку и g с последующим пропусканием через фильтр верхних частот;
- ускорение поперечного положения базисной точки Р пилота, являющееся результатом перемножения φвч с коэффициентом усиления Ку и g с последующим пропусканием через фильтр верхних частот;
g - постоянная силы тяжести Земли;
Ку - коэффициент усиления поперечной координации;
φкрена - соответствует углу крена тренажера, получаемому в результате углового ускорения крена или угловой скорости крена имитируемого летательного аппарата.
где φвч - угол крена тренажера, пропущенный через фильтр верхних частот;
g - постоянная силы тяжести Земли;
Ку - коэффициент усиления поперечной координации;
φкрена - соответствует углу крена тренажера, получаемому в результате углового ускорения крена или угловой скорости крена имитируемого летательного аппарата.
3. Способ по п.2, отличающийся тем, что в упомянутом математическом преобразовании коэффициент усиления поперечной координации Ку находится в диапазоне между 0 и 1, что позволяет уменьшить поперечное перемещение, за счет некоторой допустимой паразитной поперечной удельной силы, путем модуляции в диапазоне между случаем «отсутствия координации», когда Ку=0, и случаем «полной координации», когда Ку=1.
4. Способ по п.3, отличающийся тем, что Ку=1, и угол крена (φкрена) получают с помощью фильтра верхних частот 3-го или 4-го порядка, воздействующего на угловую скорость крена имитируемого летательного аппарата, а поперечное ускорение в каждый момент времени равно этому углу крена (φкрена), умноженному на ускорение (g) силы тяжести Земли.
5. Способ по п.2, отличающийся тем, что математическое преобразование предусматривает фильтр верхних частот 2-го порядка для угла крена (φкрена) и фильтр 1-го порядка, гасящий движение в направлении «у», в соответствии со следующими формулами передаточных функций:

где Рогр - входная угловая скорость крена, ограничиваемая посредством понижающего настроечного коэффициента усиления Kd и опционально посредством функции, ограничивающей угловую скорость крена таким образом, что для ступеньки в сигнале управления элеронами боковое перемещение тренажера имеет конечное значение, и где Р - оператор Лапласа.
где Рогр - входная угловая скорость крена, ограничиваемая посредством понижающего настроечного коэффициента усиления Kd и опционально посредством функции, ограничивающей угловую скорость крена таким образом, что для ступеньки в сигнале управления элеронами боковое перемещение тренажера имеет конечное значение, и где Р - оператор Лапласа.
6. Способ по п.2, отличающийся тем, что математическое преобразование предусматривает использование фильтра верхних частот (φвч) 1-го порядка для угла крена и фильтра 2-го порядка, гасящего движение в направлении «у».
7. Способ по п.1, в котором вторую составляющую удельной силы в поперечном направлении получают посредством четырех дополнительных фильтров: первого набора из двух комплементарных фильтров для углового ускорения крена и второго набора из двух комплементарных фильтров для углового ускорения рыскания, при этом в каждом наборе комплементарных фильтров один предназначен для управления поперечным отклонением тренажера, а другой - для управления углом крена тренажера, в соответствии со следующими формулами передаточных функций:

и
где рогр и rогр - входные угловая скорость крена и угловая скорость рыскания соответственно, ограничиваемые посредством понижающих настроечных коэффициентов усиления Kd и Кr соответственно, и опционально посредством функции, ограничивающей угловую скорость, а Р - оператор Лапласа.
и
где рогр и rогр - входные угловая скорость крена и угловая скорость рыскания соответственно, ограничиваемые посредством понижающих настроечных коэффициентов усиления Kd и Кr соответственно, и опционально посредством функции, ограничивающей угловую скорость, а Р - оператор Лапласа.
8. Способ по любому из пп.1-7, отличающийся тем, что фиксированной точкой имитируемого летательного аппарата является центр тяжести упомянутого имитируемого летательного аппарата.
9. Машиночитаемое устройство для хранения данных, хранящее компьютерный программный продукт, который при исполнении его компьютером, побуждает компьютер осуществлять способ управления движениями пилотажного тренажера по любому из пп.1-8.
10. Контроллер для управления движениями пилотажного тренажера, предусматривающими линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость (р) крена и угловая скорость (r) рыскания, а также удельная сила (Ау) в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение (у) и угол (φ) крена тренажера, при этом
контроллер содержит любые компоненты из таких, как:
первый вычислительный блок, выполненный с возможностью вычисления угла (φ) крена тренажера, обуславливаемого углом крена имитируемого летательного аппарата, путем коррекции первоначально вычисленного значения (φвч) угла (φ) крена с коэффициентом (φкорр) коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения (у) тренажера в соответствии с направлением силы тяжести Земли, и/или
второй вычислительный блок, выполненный с возможностью разложения удельной силы (Ау пилота), действующей в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой (Ау) в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием (r), и второй член, связанный с угловыми ускорениями крена (р), в соответствии с формулой:

где хрЛА - координата «х» базисной точки (Р) пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата, а zрЛА - координата «z» базисной точки пилота в упомянутой системе координат, - угловое ускорение крена, а
- угловое ускорение крена, а  - угловое ускорение рыскания;
- угловое ускорение рыскания;
фильтр верхних частот и фильтр нижних частот для фильтрации первой составляющей (Ау);
два набора, каждый из которых состоит из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице, для параллельной фильтрации каждого из членов второй составляющей,
сумматор для суммирования выходного сигнала фильтра верхних частот и выходных сигналов первых комплементарных фильтров каждого набора для вычисления желаемого поперечного положения (у) тренажера, а также сумматор для суммирования выходного сигнала фильтра нижних частот и выходных сигналов вторых комплементарных фильтров каждого набора для вычисления желаемого угла (φ) крена тренажера.
контроллер содержит любые компоненты из таких, как:
первый вычислительный блок, выполненный с возможностью вычисления угла (φ) крена тренажера, обуславливаемого углом крена имитируемого летательного аппарата, путем коррекции первоначально вычисленного значения (φвч) угла (φ) крена с коэффициентом (φкорр) коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения (у) тренажера в соответствии с направлением силы тяжести Земли, и/или
второй вычислительный блок, выполненный с возможностью разложения удельной силы (Ау пилота), действующей в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой (Ау) в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием (r), и второй член, связанный с угловыми ускорениями крена (р), в соответствии с формулой:
где хрЛА - координата «х» базисной точки (Р) пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата, а zрЛА - координата «z» базисной точки пилота в упомянутой системе координат,
фильтр верхних частот и фильтр нижних частот для фильтрации первой составляющей (Ау);
два набора, каждый из которых состоит из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице, для параллельной фильтрации каждого из членов второй составляющей,
сумматор для суммирования выходного сигнала фильтра верхних частот и выходных сигналов первых комплементарных фильтров каждого набора для вычисления желаемого поперечного положения (у) тренажера, а также сумматор для суммирования выходного сигнала фильтра нижних частот и выходных сигналов вторых комплементарных фильтров каждого набора для вычисления желаемого угла (φ) крена тренажера.
11. Пилотажный тренажер, выполненный с возможностью совершения управляемых движений, предусматривающих линейные и угловые ускорения, воспринимаемые пилотом, сидящим в кресле пилота, вследствие чего угловая скорость (р) крена и угловая (r) скорость рыскания, а также удельная сила (Ау) в поперечном направлении, вычисляемые в соответствии с моделью имитируемого летательного аппарата в фиксированной точке имитируемого летательного аппарата, преобразуются программой движения в поперечное положение (у) и угол (φ) крена тренажера, при этом пилотажный тренажер содержит любые компоненты из таких, как: первый вычислительный блок, выполненный с возможностью вычисления угла (φ) крена тренажера, обуславливаемого углом крена имитируемого летательного аппарата, путем коррекции первоначально вычисленного значения (φвч) угла (φ) крена с коэффициентом (φкорр) коррекции, пропорциональным поперечной удельной силе, вносимой гасящим фильтром, используемым во время вычисления выравнивания поперечного положения (у) тренажера в соответствии с направлением силы тяжести Земли, и/или
второй вычислительный блок, выполненный с возможностью разложения удельной силы (Ау пилота), действующей в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой (Ау) в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием (r), и второй член, связанный с угловыми ускорениями крена (р), в соответствии с формулой:

где хрЛА - координата «х» базисной точки (Р) пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата, а zрЛА - координата «z» базисной точки пилота в упомянутой системе координат, - угловое ускорение крена, а
- угловое ускорение крена, а  - угловое ускорение рыскания;
- угловое ускорение рыскания;
фильтр верхних частот и фильтр нижних частот для фильтрации первой составляющей (Ау);
два набора, каждый из которых состоит из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице, для параллельной фильтрации каждого из членов второй составляющей,
сумматор для суммирования выходного сигнала фильтра верхних частот и выходных сигналов первых из комплементарных фильтров каждого набора для вычисления желаемого поперечного положения (у) тренажера, а также сумматор для суммирования выходного сигнала фильтра нижних частот и выходных сигналов вторых из комплементарных фильтров каждого набора для вычисления желаемого угла (φ) крена тренажера.
второй вычислительный блок, выполненный с возможностью разложения удельной силы (Ау пилота), действующей в поперечном направлении в базисной точке пилота в имитируемом летательном аппарате, на первую составляющую и вторую составляющую, причем первая составляющая связана с удельной силой (Ау) в фиксированной точке имитируемого летательного аппарата, а вторая составляющая имеет первый член, связанный с ускорениями, обуславливаемыми рысканием (r), и второй член, связанный с угловыми ускорениями крена (р), в соответствии с формулой:
где хрЛА - координата «х» базисной точки (Р) пилота в системе координат, имеющей начало в упомянутой фиксированной точке имитируемого летательного аппарата, а zрЛА - координата «z» базисной точки пилота в упомянутой системе координат,
фильтр верхних частот и фильтр нижних частот для фильтрации первой составляющей (Ау);
два набора, каждый из которых состоит из первого и второго комплементарных фильтров, причем комплементарные фильтры являются фильтрами, сумма передаточных функций которых равна единице, для параллельной фильтрации каждого из членов второй составляющей,
сумматор для суммирования выходного сигнала фильтра верхних частот и выходных сигналов первых из комплементарных фильтров каждого набора для вычисления желаемого поперечного положения (у) тренажера, а также сумматор для суммирования выходного сигнала фильтра нижних частот и выходных сигналов вторых из комплементарных фильтров каждого набора для вычисления желаемого угла (φ) крена тренажера.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP05447231.1 | 2005-10-12 | ||
| EP05447231 | 2005-10-12 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2008118206A RU2008118206A (ru) | 2009-11-20 |
| RU2425409C2 true RU2425409C2 (ru) | 2011-07-27 |
Family
ID=36204350
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2008118206/08A RU2425409C2 (ru) | 2005-10-12 | 2006-10-12 | Способ управления движениями пилотажного тренажера и пилотажный тренажер, реализующий такой способ |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US8393902B2 (ru) |
| EP (1) | EP1946193B2 (ru) |
| JP (1) | JP5715324B2 (ru) |
| CN (1) | CN101305328B (ru) |
| AT (1) | ATE462163T1 (ru) |
| CA (1) | CA2625103C (ru) |
| DE (1) | DE602006013179D1 (ru) |
| ES (1) | ES2342901T5 (ru) |
| HK (1) | HK1123612A1 (ru) |
| PT (1) | PT1946193E (ru) |
| RU (1) | RU2425409C2 (ru) |
| WO (1) | WO2007042290A1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2820152C1 (ru) * | 2024-01-30 | 2024-05-30 | Федеральное автономное учреждение "Центральный аэрогидродинамический институт имени профессора Н.Е. Жуковского" (ФАУ "ЦАГИ") | Способ моделирования динамики полета летательного аппарата |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8827709B1 (en) | 2008-05-08 | 2014-09-09 | ACME Worldwide Enterprises, Inc. | Dynamic motion seat |
| NL2005174C2 (en) | 2010-07-29 | 2012-01-31 | E2M Technologies B V | Movement-simulator. |
| US8653780B2 (en) * | 2010-09-28 | 2014-02-18 | The Boeing Company | Integrated upsampler and filtering for multi-rate controller for electro-mechanical flight actuation system |
| TWI448969B (zh) * | 2011-02-16 | 2014-08-11 | Chang Jung Christian University | Three - axis dynamic simulation platform system and its control method |
| CN102390544B (zh) * | 2011-09-15 | 2013-11-13 | 北京航空航天大学 | 一种连动式飞机模拟器座舱布局转换装置 |
| US8874286B2 (en) | 2012-02-27 | 2014-10-28 | Textron Innovations, Inc. | Yaw damping system and method for aircraft |
| US8620492B2 (en) * | 2012-02-27 | 2013-12-31 | Textron Innovations Inc. | Yaw damping system and method for aircraft |
| DE102012103870B4 (de) * | 2012-04-19 | 2016-10-13 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Bewegungssystemzustand |
| US9536446B2 (en) * | 2012-12-03 | 2017-01-03 | Dynamic Motion Group Gmbh | Motion simulation system controller and associated methods |
| US9259657B2 (en) | 2012-12-03 | 2016-02-16 | Dynamic Motion Group Gmbh | Motion simulation system and associated methods |
| US9242181B2 (en) | 2012-12-03 | 2016-01-26 | Dynamic Motion Group Gmbh | Amusement park elevator drop ride system and associated methods |
| EP2854120A1 (en) | 2013-09-26 | 2015-04-01 | Thomson Licensing | Method and device for controlling a haptic device |
| DE102015102459B4 (de) * | 2015-02-20 | 2016-11-03 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zur Ansteuerung eines Simulators |
| US9837939B1 (en) * | 2015-04-01 | 2017-12-05 | Lockheed Martin Corporation | System and method for providing vibration isolation by magnetic levitation |
| US9845146B2 (en) * | 2015-10-23 | 2017-12-19 | The Boeing Company | Zoom climb prevention system for enhanced performance |
| US11288340B2 (en) * | 2016-03-31 | 2022-03-29 | Cae Inc. | Dynamically updating a model associated to a simulated interactive object |
| FR3052861B1 (fr) * | 2016-06-20 | 2018-07-13 | Ixblue | Procede de compensation des couples de coriolis, centrifuges et de gravite dans un simulateur de mouvements, systeme a simulateur de mouvements |
| CN106403937B (zh) * | 2016-07-07 | 2023-05-26 | 上海机电工程研究所 | 提高动基座对准精度的导航信息滤波方法 |
| CN108495789A (zh) * | 2017-05-23 | 2018-09-04 | 深圳市大疆创新科技有限公司 | 加速度计的安装误差检测方法、设备以及无人机 |
| CN107150816B (zh) * | 2017-06-06 | 2019-04-26 | 哈尔滨工业大学 | 一种变质心飞行器模拟装置 |
| CN108388279B (zh) * | 2018-02-12 | 2021-09-17 | 浙江中控技术股份有限公司 | 一种高速旋转机械设备的控制方法和装置 |
| KR102239618B1 (ko) | 2019-09-17 | 2021-04-12 | 김경환 | 가상현실 조종수 시뮬레이터용 제어 시스템 |
| IT202000005671A1 (it) * | 2020-03-17 | 2021-09-17 | Faiveley Transport Italia Spa | Procedimento per la stima di una velocità longitudinale di almeno un veicolo ferroviario |
| CN111816023B (zh) * | 2020-07-27 | 2022-05-03 | 中国工程物理研究院总体工程研究所 | 一种四轴载人离心机的运动学方法 |
| CN112307572B (zh) * | 2020-07-27 | 2022-10-21 | 中国工程物理研究院总体工程研究所 | 一种载人离心机感知误差动态分配的过载、姿态模拟方法 |
| KR102499292B1 (ko) * | 2020-12-01 | 2023-02-13 | 주식회사 젠스템 | 운용 범위 마진을 기반으로 큐잉 알고리즘을 구현하는 모션 플랫폼의 제어 방법 |
| RU2768310C1 (ru) * | 2021-07-07 | 2022-03-23 | Акционерное общество "Российская самолетостроительная корпорация "МиГ" (АО "РСК "МиГ") | Система управления летательного аппарата в канале курса |
| CN113674582A (zh) * | 2021-08-08 | 2021-11-19 | 中国航空工业集团公司沈阳飞机设计研究所 | 一种六自由度运动平台加速度模拟方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3678256A (en) * | 1970-10-05 | 1972-07-18 | Mc Donnell Douglas Corp | Performance and failure assessment monitor |
| US3732630A (en) * | 1970-10-21 | 1973-05-15 | Us Navy | Visual simulator |
| US3989208A (en) * | 1972-11-16 | 1976-11-02 | The Boeing Company | Thrust and flight path control decoupling system |
| US4956780A (en) * | 1988-12-08 | 1990-09-11 | The Boeing Company | Flight path angle command flight control system for landing flare |
| US5353242A (en) * | 1988-12-28 | 1994-10-04 | Veda Incorporated | Motion base control process and operator perceptual simulator |
| US5179525A (en) * | 1990-05-01 | 1993-01-12 | University Of Florida | Method and apparatus for controlling geometrically simple parallel mechanisms with distinctive connections |
| GB2253825B (en) * | 1991-03-20 | 1994-06-22 | Rediffusion Simulation Ltd | Vehicle simulator |
| US5195700A (en) * | 1991-08-28 | 1993-03-23 | United Technologies Corporation | Low speed model following velocity command system for rotary wing aircraft |
| JPH08248872A (ja) * | 1995-03-08 | 1996-09-27 | Toyota Motor Corp | 運転模擬試験装置 |
| US5711670A (en) * | 1995-11-13 | 1998-01-27 | Barr; Craig Kevin | Motion-base ride simulator with improved passenger loading and unloading method and apparatus |
| US5762068A (en) * | 1995-11-27 | 1998-06-09 | Quinton Instrument Company | ECG filter and slew rate limiter for filtering an ECG signal |
| AU736350C (en) | 1997-06-16 | 2002-05-09 | Swisscom Mobile Ag | Chipcard and method for communication between an external device and a chipcard |
| JP3716134B2 (ja) * | 1999-07-13 | 2005-11-16 | 株式会社日立製作所 | 動揺装置の動作指令データ生成方法及び動揺装置 |
| JP2003186387A (ja) * | 2001-12-20 | 2003-07-04 | Masao Nagai | 運転シミュレーション装置のための動揺装置の制御方法 |
| US7236914B1 (en) * | 2002-02-22 | 2007-06-26 | Microsoft Corporation | Integrated aircraft flight dynamics prediction and simulation |
| JP4104362B2 (ja) * | 2002-03-27 | 2008-06-18 | 泰敬 田川 | 体感加速度模擬装置のための動揺装置の制御方法 |
| US7033176B2 (en) * | 2002-07-17 | 2006-04-25 | Powergrid Fitness, Inc. | Motion platform system and method of rotating a motion platform about plural axes |
| US6772080B2 (en) * | 2002-12-24 | 2004-08-03 | The Boeing Company | System and method for kinematic consistency processing |
| US7496865B2 (en) * | 2005-05-20 | 2009-02-24 | Chung Yuan Christian University | OTA-based high-order filters |
-
2006
- 2006-10-12 ES ES06806200T patent/ES2342901T5/es active Active
- 2006-10-12 WO PCT/EP2006/009841 patent/WO2007042290A1/en active Application Filing
- 2006-10-12 AT AT06806200T patent/ATE462163T1/de not_active IP Right Cessation
- 2006-10-12 CN CN2006800378042A patent/CN101305328B/zh active Active
- 2006-10-12 CA CA2625103A patent/CA2625103C/en active Active
- 2006-10-12 PT PT06806200T patent/PT1946193E/pt unknown
- 2006-10-12 DE DE602006013179T patent/DE602006013179D1/de active Active
- 2006-10-12 EP EP06806200A patent/EP1946193B2/en active Active
- 2006-10-12 US US12/083,496 patent/US8393902B2/en active Active
- 2006-10-12 RU RU2008118206/08A patent/RU2425409C2/ru active
- 2006-10-12 JP JP2008534934A patent/JP5715324B2/ja active Active
-
2009
- 2009-01-23 HK HK09100782.3A patent/HK1123612A1/xx active IP Right Revival
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2820152C1 (ru) * | 2024-01-30 | 2024-05-30 | Федеральное автономное учреждение "Центральный аэрогидродинамический институт имени профессора Н.Е. Жуковского" (ФАУ "ЦАГИ") | Способ моделирования динамики полета летательного аппарата |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009511968A (ja) | 2009-03-19 |
| PT1946193E (pt) | 2010-06-23 |
| EP1946193B2 (en) | 2013-01-30 |
| US20090047636A1 (en) | 2009-02-19 |
| RU2008118206A (ru) | 2009-11-20 |
| CA2625103A1 (en) | 2007-04-19 |
| ES2342901T3 (es) | 2010-07-16 |
| CN101305328A (zh) | 2008-11-12 |
| EP1946193A1 (en) | 2008-07-23 |
| JP5715324B2 (ja) | 2015-05-07 |
| CN101305328B (zh) | 2012-10-17 |
| EP1946193B1 (en) | 2010-03-24 |
| US20110070564A2 (en) | 2011-03-24 |
| CA2625103C (en) | 2014-07-22 |
| WO2007042290A1 (en) | 2007-04-19 |
| US8393902B2 (en) | 2013-03-12 |
| DE602006013179D1 (de) | 2010-05-06 |
| ES2342901T5 (es) | 2013-05-28 |
| HK1123612A1 (en) | 2009-06-19 |
| ATE462163T1 (de) | 2010-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2425409C2 (ru) | Способ управления движениями пилотажного тренажера и пилотажный тренажер, реализующий такой способ | |
| Padfield et al. | Flight simulation in academia HELIFLIGHT in its first year of operation at the University of Liverpool | |
| CN105939765B (zh) | 运动模拟系统控制器和关联的方法 | |
| CN101714302A (zh) | 一种飞机自动驾驶模拟装置 | |
| Mauro et al. | Dynamic flight simulation with a 3 dof parallel platform | |
| Hosman et al. | Integrated design of flight simulator motion cueing systems | |
| Hosman et al. | Are criteria for motion cueing and time delays possible? Part 2 | |
| Beukers et al. | Investigation into pilot perception and control during Decrab maneuvers in simulated flight | |
| Weiß | Control of a dynamic driving simulator: Time-variant motion cueing algorithms and prepositioning | |
| Rengifo et al. | Impact of human-centered vestibular system model for motion control in a driving simulator | |
| Nehaoua et al. | Restitution movement for a low cost driving simulator | |
| Ackerman et al. | Pilot-in-the-loop flight simulator for NASA’s Transport Class Model | |
| Parrish et al. | Comparison of a linear and a nonlinear washout for motion simulators utilizing objective and subjective data from ctol transport landing approaches | |
| Popovici et al. | Time-varying manual control identification in a stall recovery task under different simulator motion conditions | |
| Ahmad et al. | Motion Cueing Algorithm for Flight Simulator: Interfacing and Pilot Controls Implementation | |
| Reardon et al. | Evaluation of motion tuning methods on the vertical motion simulator | |
| Bukal et al. | An adaptive model predictive control based motion drive algorithm | |
| Essameldin Ahmad et al. | Motion Cueing Algorithm for Flight Simulator: Interfacing and Pilot Controls Implementation | |
| Dehouck et al. | The effects of simulator motion filter settings on pilot manual control behaviour | |
| Fellah et al. | Fuzzy/PSO Based Washout Filter for Inertial Stimuli Restitution in Flight Simulation | |
| Sadraei | Driving Simulator Motion Cueing Assessment: A Platform Design Perspective | |
| Lee et al. | How to design intuitive flight controls for novice onboard operators? | |
| Sadraei et al. | Understanding cue utility in controlled evasive driving manoeuvres: optimizing vestibular cues for simulator & human abilities | |
| Tang et al. | An Improved Washout Algorithm for UPRT Scenario | |
| Abdelgawad et al. | A Station with Multiple Head-Mounted Displays for Learning Advanced Driver Assistance Systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20210203 |
|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20210329 |