RU2408500C2 - Возвращаемый беспилотный летательный аппарат с трехопорным шасси - Google Patents
Возвращаемый беспилотный летательный аппарат с трехопорным шасси Download PDFInfo
- Publication number
- RU2408500C2 RU2408500C2 RU2008140725/11A RU2008140725A RU2408500C2 RU 2408500 C2 RU2408500 C2 RU 2408500C2 RU 2008140725/11 A RU2008140725/11 A RU 2008140725/11A RU 2008140725 A RU2008140725 A RU 2008140725A RU 2408500 C2 RU2408500 C2 RU 2408500C2
- Authority
- RU
- Russia
- Prior art keywords
- landing gear
- wing
- unmanned aerial
- aircraft
- aerial vehicle
- Prior art date
Links
Images

Landscapes
- Toys (AREA)
Abstract
Изобретение относится к авиационно-космической технике, а именно к беспилотным летательным аппаратам. Летательный аппарат выполнен по схеме высокоплан и содержит корпус, крыло, хвостовое оперение, силовую установку, трехопорное шасси, бортовую систему и целевую нагрузку. Корпус выполнен из набора модулей. Силовая установка состоит из двигателя внутреннего сгорания и толкающего воздушного винта. Шасси имеет одну основную убираемую в полете опору в виде колеса и две неубираемых вспомогательных опоры в виде упругих кронштейнов, оканчивающихся роликом или снашиваемым опорным элементом. Вспомогательные опоры являются продолжением силовой конструкции горизонтального оперения, которое имеет отрицательный угол поперечного V крыла. Снизу в передней части корпуса летательного аппарата установлен съемный контейнер. Достигается упрощение конструкции и повышение надежности шасси. 3 ил.
Description
Изобретение относится к авиационно-космической технике, а именно к беспилотным летательным аппаратам. Известны беспилотные летательные аппараты (БЛА), получившие широкое применение в военных целях [1, 2, 3].
Однако БЛА, не имеющие шасси с опорами в виде колес, требуют использования специальных пусковых устройств, что приводит к удорожанию комплекса с БЛА в целом и снижению надежности в эксплуатации.
БЛА, имеющие шасси с опорами в виде колес, требуют для своей эксплуатации хорошо подготовленные площадки, что снижает мобильность и оперативность использования таких БЛА, например, в горной местности.
Известен БЛА «Пчела-1» [3], включающий фюзеляж с установленными в него целевой нагрузкой, топливным баком, самолетными системами, силовой установкой и сменное крыло, крепящееся на фюзеляже вместе с парашютным контейнером и шасси, с опорами в виде упругих стоек сложной формы. По этой причине старт упомянутого летательного аппарата осуществляется со сложной пусковой установки при помощи пороховых ускорителей, устанавливаемых непосредственно на подвижную тележку, которая движется по направляющим ограниченной длины. Это требует больших затрат для эксплуатации упомянутого БЛА. При этом посадка упомянутого БЛА сопровождается частыми разрушениями конструкции БЛА.
Известен БЛА Altus [4], включающий фюзеляж с установленными в него целевой нагрузкой, топливным баком, самолетными системами, силовой установкой, крыло, крепящееся к фюзеляжу, трехопорное шасси с одной носовой и двумя основными стойками и опорами в виде колес. Однако убирающееся в полете трехопорное шасси с двумя основными и одной носовой стойками требует для эксплуатации хорошо подготовленные площадки. Уборка стоек шасси с опорами в фюзеляж занимает внутренние объемы и ослабляет прочность и жесткость конструкции фюзеляжа.
Задачей изобретения является разработка возвращаемого беспилотного летательного аппарата с трехопорным шасси, позволяющего достичь следующий технический результат:
- снижение массы шасси и одновременно снижение требования к подготовке площадки для взлета-посадки БЛА;
- упрощение конструкции шасси и повышение его надежности;
- сохранение исправности и работоспособности конструкции беспилотного летательного аппарата;
- обеспечение высокой эксплуатационной технологичности и ремонтопригодности.
Сущностью изобретения является возвращаемый беспилотный летательный аппарат с трехопорным шасси, включающий корпус, крыло, хвостовое оперение, силовую установку, шасси, бортовую систему и целевую нагрузку.
Указанный технический результат достигается тем, что упомянутый беспилотный летательный аппарат оснащен трехопорным шасси, в котором имеется одна, убираемая в полете, основная стойка с опорой в виде колеса. Устойчивое движение БЛА по твердой поверхности и исключение его опрокидывания набок обеспечивается установкой двух не убираемых в полете вспомогательных опор в виде упругих кронштейнов, оканчивающихся роликом или снашиваемым опорным элементом. При этом упомянутые вспомогательные опоры являются продолжением силовой конструкции горизонтального оперения, которое имеет отрицательный угол поперечного V крыла. Взлет и посадка упомянутого БЛА осуществляются по-самолетному на неподготовленную площадку. Все динамические нагрузки при рулении, взлете и посадке воспринимаются указанной основной стойкой шасси и его колесом. Корпус беспилотного летательного аппарата выполнен в виде набора модулей. Силовая установка упомянутого БЛА состоит из двигателя внутреннего сгорания и толкающего воздушного винта. Снизу в передней части корпуса упомянутого беспилотного летательного аппарата устанавливается съемный контейнер.
Изобретение поясняется чертежами:
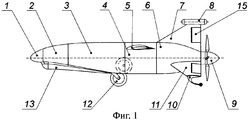
Фиг.1 - вид сбоку;
Фиг.2 - вид спереди;
Фиг.3 - вид сверху.
Корпус возвращаемого многорежимного беспилотного летательного аппарата состоит из набора модулей 1, 2, 3, 4 и 6 (фиг.1), которые в процессе эксплуатации могут заменяться на аналогичные по конструкции и форме, но с другим оборудованием.
Центральный модуль 4 является основным силовым и конструктивным элементом, к которому крепятся все остальные составные части упомянутого беспилотного летательного аппарата: модули 1, 2 (через модуль 3) и 3, крыло 5, модуль силовой установки 6 с вертикальным оперением 7 и горизонтальным 11, основная стойка шасси с колесом 12. Снизу в передней части корпуса упомянутого беспилотного летательного аппарата устанавливается съемный контейнер 13 (фиг.1 и 2).
С целью снижения массы упомянутых вспомогательных опор 10 они являются продолжением силовой конструкции горизонтального оперения 11 (фиг.1), которое имеет отрицательный угол поперечного V крыла. Для гашения динамических нагрузок в вертикальной плоскости и постоянного контакта с твердой поверхностью упомянутые вспомогательные опоры 10 выполнены в виде упругих кронштейнов, оканчивающихся роликом или снашиваемым опорным элементом, которые в случае необходимости могут заменяться. Крыло 5 и хвостовое оперение: вертикальная плоскость 7 с контейнером 8 и горизонтальные плоскости 11, имеют рулевые поверхности соответственно 14 (фиг.3), 15 (фиг.1) и 16 (фиг.3). Снижение массы вспомогательных опор 10 достигается за счет того, что они имеют небольшие линейные размеры, а все нагрузки с них передаются на конструкцию горизонтального оперения, где обеспечить жесткость конструкции можно с меньшими затратами массы. Уменьшение размеров упомянутых вспомогательных опор достигается путем придания горизонтальному оперению 11 отрицательного угла поперечного V крыла. Это вместе с тем позволяет уменьшить размеры вертикальной плоскости 7 оперения при той же путевой устойчивости БЛА в полете.
Уменьшение количества подвижных устройств и деталей в шасси позволяет повысить его надежность, а возможность замены снашиваемых элементов или роликов способствует сохранению исправности и работоспособности конструкции беспилотного летательного аппарата в длительной эксплуатации в сложных и напряженных условиях, повышает технологичность и ремонтопригодность.
Для повышения эксплуатационной технологичности и высокой ремонтопригодности упомянутый беспилотный летательный аппарат представляет собой совокупность отдельных легкосъемных конструктивных модулей (фиг.1), что обеспечивает их легкую и быструю замену, быструю локализацию отказа и его устранение.
Источники информации
1. Военный энциклопедический словарь. - М.: Воениздат, 1983. - 863 с. с ил.
2. Ю.А.Зуенко, С.Е.Коростылев. Боевые самолеты России. - М.: Элакос, 1994. - 192 с. с ил.
3. Малогабаритный комплекс наблюдения в реальном масштабе времени с дистанционно-пилотируемым летательным аппаратом «Пчела-1Т». Интернет-сайт ОКБ им. А.С.Яковлева. www.yak.ru/PROD/current_rpv.php
4. Jane's. Unmanned aerial vehicles and targets. Issue twenty one - november 2003. Jane's information Group Limited Inc., 110N. Royal Street, Suite 200, Alexandria, Virginia 22314, USA.
5. Ганин С.М., Карпенко A.B., Колмогоров В.В., Петров Г.Ф. Беспилотные летательные аппараты. - СПб.: "Невский бастион", 1999.
6. Практическая аэродинамика маневренных самолетов. Учебник для летного состава. Под общ. ред. Н.М.Лысенко. М.: Воениздат, 1977. - 439 с. с ил.
7. Аэродинамика летательных аппаратов. Учебник для ВУЗов по специальности «Самолетостроение» / Г.А.Колесников, В.К.Марков, А.А.Михайлюк и др.: Под ред. Г.А.Колесникова. М.: Машиностроение, 1993. - 544 с. с ил.
Claims (1)
- Возвращаемый беспилотный летательный аппарат с трехопорным шасси, включающий корпус, крыло, хвостовое оперение, силовую установку, шасси, бортовую систему и целевую нагрузку, отличающийся тем, что беспилотный летательный аппарат выполнен по схеме высокоплан, при этом корпус упомянутого беспилотного летательного аппарата выполнен из набора модулей, его силовая установка состоит из двигателя внутреннего сгорания и толкающего воздушного винта, шасси имеет одну основную убираемую в полете опору в виде колеса и две неубираемых вспомогательных опоры в виде упругих кронштейнов, оканчивающихся роликом или снашиваемым опорным элементом, причем упомянутые вспомогательные опоры являются продолжением силовой конструкции горизонтального оперения, которое имеет отрицательный угол поперечного V крыла, а снизу в передней части корпуса упомянутого беспилотного летательного аппарата устанавливается съемный контейнер.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2008140725/11A RU2408500C2 (ru) | 2008-10-15 | 2008-10-15 | Возвращаемый беспилотный летательный аппарат с трехопорным шасси |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2008140725/11A RU2408500C2 (ru) | 2008-10-15 | 2008-10-15 | Возвращаемый беспилотный летательный аппарат с трехопорным шасси |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2008140725A RU2008140725A (ru) | 2010-04-20 |
| RU2408500C2 true RU2408500C2 (ru) | 2011-01-10 |
Family
ID=44054767
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2008140725/11A RU2408500C2 (ru) | 2008-10-15 | 2008-10-15 | Возвращаемый беспилотный летательный аппарат с трехопорным шасси |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2408500C2 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2851889C1 (ru) * | 2025-05-22 | 2025-12-01 | Общество с ограниченной ответственностью "РуАвиа" | Модульная двухмоторная тяжелая транспортная беспилотная платформа самолетного типа |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2181333C2 (ru) * | 2000-04-17 | 2002-04-20 | Общество с ограниченной ответственностью "ТЕХКОМТЕХ" | Беспилотный многорежимный высокоманевренный летательный аппарат |
| DE10221304A1 (de) * | 2002-05-14 | 2003-11-27 | Roland Crnogorac | Luftfahrzeug |
| RU2256587C1 (ru) * | 2003-12-05 | 2005-07-20 | Краснов Юрий Константинович | Самолет |
| RU2323850C2 (ru) * | 2005-06-15 | 2008-05-10 | ООО "Центральный научно-исследовательский институт авиационных ракетных комплексов и систем" | Многовариантный беспилотный летательный аппарат |
| RU76888U1 (ru) * | 2008-07-03 | 2008-10-10 | Закрытое Акционерное Общество "Транзас" | Беспилотный летательный аппарат |
-
2008
- 2008-10-15 RU RU2008140725/11A patent/RU2408500C2/ru not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2181333C2 (ru) * | 2000-04-17 | 2002-04-20 | Общество с ограниченной ответственностью "ТЕХКОМТЕХ" | Беспилотный многорежимный высокоманевренный летательный аппарат |
| DE10221304A1 (de) * | 2002-05-14 | 2003-11-27 | Roland Crnogorac | Luftfahrzeug |
| RU2256587C1 (ru) * | 2003-12-05 | 2005-07-20 | Краснов Юрий Константинович | Самолет |
| RU2323850C2 (ru) * | 2005-06-15 | 2008-05-10 | ООО "Центральный научно-исследовательский институт авиационных ракетных комплексов и систем" | Многовариантный беспилотный летательный аппарат |
| RU76888U1 (ru) * | 2008-07-03 | 2008-10-10 | Закрытое Акционерное Общество "Транзас" | Беспилотный летательный аппарат |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2851889C1 (ru) * | 2025-05-22 | 2025-12-01 | Общество с ограниченной ответственностью "РуАвиа" | Модульная двухмоторная тяжелая транспортная беспилотная платформа самолетного типа |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2008140725A (ru) | 2010-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7240878B2 (en) | High wing monoplane aerospace plane based fighter | |
| RU2486086C2 (ru) | Транспортная система калашникова | |
| RU2010105211A (ru) | Аэрокосмический летательный аппарат | |
| CN102424110A (zh) | 可变翼微型水陆飞行器 | |
| RU2408500C2 (ru) | Возвращаемый беспилотный летательный аппарат с трехопорным шасси | |
| CN205293099U (zh) | 一种使用同轴串列式双发动机的固定翼无人机 | |
| RU2011131316A (ru) | Ракета-носитель | |
| RU2323850C2 (ru) | Многовариантный беспилотный летательный аппарат | |
| CN106143907A (zh) | 一种喷气飞碟 | |
| RU112154U1 (ru) | Многоцелевой самолет | |
| RU150667U1 (ru) | Многоцелевой беспилотный летательный аппарат среднего радиуса действия | |
| RU2010104373A (ru) | Самолет на воздушной подушке с аэростатической разгрузкой | |
| RU2013123312A (ru) | Универсальный автожир | |
| RU2384470C1 (ru) | Возвращаемый многорежимный беспилотный летательный аппарат с изменяемым запасом статической устойчивости | |
| RU2550797C1 (ru) | Дирижабль | |
| RU2327604C1 (ru) | Возвращаемый многорежимный беспилотный летательный аппарат | |
| RU2007102442A (ru) | Мобильная авиационная ракетная космическая система | |
| RU107126U1 (ru) | Беспилотный летательный аппарат | |
| RU2548829C2 (ru) | Транспортный самолёт для перевозки и разгона в стратосфере ракет космического назначения | |
| RU2812634C1 (ru) | Малоразмерный беспилотный летательный аппарат | |
| RU2482015C2 (ru) | Самолет с двойным фюзеляжем | |
| RU2787906C1 (ru) | Высокоскоростной беспилотный летательный аппарат | |
| RU92848U1 (ru) | Самолет для воздушного мониторинга состояния окружающей среды | |
| RU226535U1 (ru) | Устройство запуска беспилотных летательных аппаратов | |
| RU88645U1 (ru) | Беспилотный летательный аппарат со стабилизацией режимов полета |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20121016 |