KR20230050737A - 수술용 가이드 디자인 방법 및 장치 - Google Patents
수술용 가이드 디자인 방법 및 장치 Download PDFInfo
- Publication number
- KR20230050737A KR20230050737A KR1020210133915A KR20210133915A KR20230050737A KR 20230050737 A KR20230050737 A KR 20230050737A KR 1020210133915 A KR1020210133915 A KR 1020210133915A KR 20210133915 A KR20210133915 A KR 20210133915A KR 20230050737 A KR20230050737 A KR 20230050737A
- Authority
- KR
- South Korea
- Prior art keywords
- anchor pin
- virtual
- fixture
- pin hole
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
- A61B17/1739—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body
- A61B17/176—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the jaw
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C1/00—Dental machines for boring or cutting ; General features of dental machines or apparatus, e.g. hand-piece design
- A61C1/08—Machine parts specially adapted for dentistry
- A61C1/082—Positioning or guiding, e.g. of drills
- A61C1/084—Positioning or guiding, e.g. of drills of implanting tools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C8/00—Means to be fixed to the jaw-bone for consolidating natural teeth or for fixing dental prostheses thereon; Dental implants; Implanting tools
- A61C8/0089—Implanting tools or instruments
- A61C8/009—Implanting tools or instruments for selecting the right implanting element, e.g. templates
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/102—Modelling of surgical devices, implants or prosthesis
- A61B2034/104—Modelling the effect of the tool, e.g. the effect of an implanted prosthesis or for predicting the effect of ablation or burring
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/108—Computer aided selection or customisation of medical implants or cutting guides
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Veterinary Medicine (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Dentistry (AREA)
- Engineering & Computer Science (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Epidemiology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Robotics (AREA)
- Dental Prosthetics (AREA)
Abstract
이를 통하여, 임플란트 수술 시 수술용 가이드가 잇몸에 정확히 밀착될 수 있으며, 앵커핀 홀에 의해 픽스쳐 식립이 방해받지 않을 수 있다.
Description
도 2는 본 개시의 일 실시예에 따른, 수술용 가이드 디자인 방법을 나타내는 순서도이다.
도 3 및 도 4는 도 2의 S100 단계를 부연설명하기 위한 도면들이다.
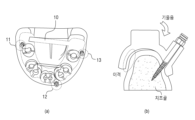
도 5는 환자의 개구량을 측정하는 방법을 나타내는 도면이다.
도 6은 앵커핀을 식립할 때 사용되는 드릴 머신을 형상화한 가상 객체를 나타내는 도면이다.
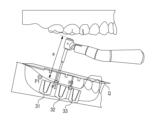
도 7 내지 도 10은 교합면에 수직인 각도로 앵커핀 홀을 형성하는 방법을 설명하기 위한 도면이다.
도 11 및 도 12는 교합면에 수직이 아닌 각도로 앵커핀 홀을 형성하는 방법을 설명하기 위한 도면이다.
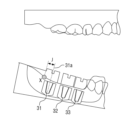
도 13은 앵커핀 홀 또는 앵커핀 중 적어도 하나와 픽스쳐를 식립하기 위한 드릴링 홀 간 충돌 여부를 확인하는 방법을 설명하는 도면이다.
도 14는 앵커핀 홀을 회전시켜 앵커핀 홀과 픽스쳐를 식립하기 위한 드릴링 홀 간 충돌을 회피하는 방법을 설명하는 도면이다.
도 15는 본 개시의 몇몇 실시예들에서 구성요소로서 사용될 수 있는 컴퓨팅 장치의 하드웨어 구성도이다.
Claims (12)
- 컴퓨팅 장치에 의하여 수행되는 방법에 있어서,
치아 정보를 기초로 수술용 가이드 디자인을 위한 디자인 데이터 상에 가상 픽스쳐를 배치하는 단계;
상기 가상 픽스쳐의 위치 및 개구량 정보를 기초로 앵커핀의 식립 위치 및 식립 각도를 결정하는 단계; 및
상기 앵커핀의 식립 위치 및 식립 각도에 대응되도록 앵커핀 홀을 상기 디자인 데이터 상에 생성하는 단계를 포함하는,
수술용 가이드 디자인 방법. - 제1 항에 있어서,
상기 치아 정보는 환자의 구강 내부 형상을 스캔한 스캔 데이터, 환자의 구강을 촬영한 CT 데이터, 및 상기 스캔 데이터와 상기 CT 데이터를 정합한 정합 데이터 중 적어도 하나를 포함하는,
수술용 가이드 디자인 방법. - 제2 항에 있어서,
상기 가상 픽스쳐를 배치하는 단계는,
상기 치아 정보를 기초로 상기 디자인 데이터의 악궁과 치아 결손 부위를 식별하는 단계;
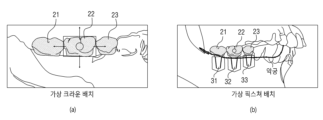
상기 악궁을 따라 상기 치아 결손 부위에 가상 크라운을 배치하는 단계; 및
상기 가상 크라운에 대응되는 위치에 상기 가상 픽스쳐를 배치하는 단계를 포함하는,
수술용 가이드 디자인 방법. - 제1 항에 있어서,
상기 앵커핀의 식립 위치 및 식립 각도를 결정하는 단계는,
상기 개구량 정보와 기준 길이를 비교하고, 상기 디자인 데이터 상의 복수의 위치 중 환자의 개구량이 상기 기준 길이를 초과하는 제1 위치를 식별하는 단계; 및
상기 제1 위치에 기초하여 상기 앵커핀의 식립 위치를 결정하는 단계를 포함하는,
수술용 가이드 디자인 방법. - 제4 항에 있어서,
상기 제1 위치에 기초하여 상기 앵커핀의 식립 위치를 결정하는 단계는,
상기 제1 위치와 상기 제1 위치에 인접한 가상 픽스쳐 사이의 간격을 확인하는 단계; 및
상기 간격이 소정 임계값 이상일 때, 상기 제1 위치가 상기 앵커핀의 식립 위치가 되도록 상기 앵커핀의 식립 위치를 결정하는 단계를 포함하는,
수술용 가이드 디자인 방법. - 제4 항에 있어서,
상기 앵커핀의 식립 각도는 상기 디자인 데이터의 교합면에 수직인 각도인,
수술용 가이드 디자인 방법. - 제1 항에 있어서,
상기 앵커핀의 식립 위치 및 식립 각도를 결정하는 단계는,
상기 가상 픽스쳐로부터 원심쪽으로 제1 거리만큼 떨어진 제2 위치에 기초하여 상기 앵커핀의 식립 위치를 결정하는 단계; 및
상기 제2 위치를 지나고 상기 디자인 데이터의 교합면에 수직인 선과 상기 제2 위치를 포인팅 한 가상의 앵커 드릴이 이루는 사잇각에 기초하여 상기 앵커핀의 식립 각도를 결정하는 단계를 포함하는,
수술용 가이드 디자인 방법. - 제7 항에 있어서,
상기 가상 픽스쳐는,
상기 디자인 데이터의 치아 결손 부위 내 가상 픽스쳐 중 최후방에 위치한 가상 픽스쳐인,
수술용 가이드 디자인 방법. - 제1 항에 있어서,
상기 앵커핀 홀을 상기 디자인 데이터 상에 생성하는 단계는,
상기 앵커핀 홀 또는 상기 앵커핀 중 적어도 하나와 픽스쳐를 식립하기 위한 드릴링 홀 간 충돌 여부를 확인하는 단계; 및
상기 충돌 여부를 확인한 결과에 기초하여 상기 앵커핀 홀의 회전각을 조정하는 단계를 포함하는,
수술용 가이드 디자인 방법. - 제9 항에 있어서,
상기 앵커핀 홀을 상기 디자인 데이터 상에 생성하는 단계는,
상기 앵커핀 홀의 회전각을 조정하기 위한 사용자 인터페이스를 제공하는 단계를 더 포함하는,
수술용 가이드 디자인 방법. - 제1 항에 있어서,
상기 앵커핀 홀을 상기 디자인 데이터 상에 생성하는 단계는,
픽스쳐를 식립하기 위한 드릴링 홀 상에 가상의 픽스쳐 식립 머신을 배치하고, 상기 앵커핀 홀 또는 상기 앵커핀 중 적어도 하나와 상기 픽스쳐 식립 머신 간의 충돌 여부를 확인하는 단계; 및
상기 충돌 여부를 확인한 결과에 기초하여 상기 앵커핀 홀의 회전각을 조정하는 단계를 포함하는,
수술용 가이드 디자인 방법. - 프로세서;
상기 프로세서에 의해 실행되는 컴퓨터 프로그램을 로드(load)하는 메모리; 및
상기 컴퓨터 프로그램을 저장하는 스토리지를 포함하되,
상기 컴퓨터 프로그램은,
치아 정보를 기초로 디자인 데이터 상에 가상 픽스쳐를 배치하는 동작,
상기 가상 픽스쳐의 위치 및 개구량 정보를 기초로 앵커핀의 식립 위치 및 식립 각도를 결정하는 동작, 및
상기 식립 위치 및 상기 식립 각도에 대응되도록 앵커핀 홀을 상기 디자인 데이터 상에 생성하는 동작을 수행하도록 하는 인스트럭션들을 포함하는,
수술용 가이드 디자인 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210133915A KR102673935B1 (ko) | 2021-10-08 | 2021-10-08 | 수술용 가이드 디자인 방법 및 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210133915A KR102673935B1 (ko) | 2021-10-08 | 2021-10-08 | 수술용 가이드 디자인 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20230050737A true KR20230050737A (ko) | 2023-04-17 |
| KR102673935B1 KR102673935B1 (ko) | 2024-06-11 |
Family
ID=86128120
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210133915A Active KR102673935B1 (ko) | 2021-10-08 | 2021-10-08 | 수술용 가이드 디자인 방법 및 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102673935B1 (ko) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200077549A (ko) * | 2017-11-02 | 2020-06-30 | 시추안 유니버시티 | 임플란트 수복 공간 분석용 측정 시스템 및 방법 |
| KR102170487B1 (ko) | 2012-05-03 | 2020-10-29 | 신세스 게엠바하 | 스캐닝된 임플란트 데이터로부터의 외과용 가이드 |
| KR102209140B1 (ko) * | 2020-08-24 | 2021-01-27 | 빙정호 | 임플란트 시술을 위한 디지털 분석 시스템 |
| KR20210047015A (ko) * | 2019-10-21 | 2021-04-29 | 오스템임플란트 주식회사 | 앵커핀 식립 방법 및 이를 수행하는 임플란트 수술용 가이드 디자인 장치 |
| KR20210114223A (ko) * | 2020-03-10 | 2021-09-23 | 오스템임플란트 주식회사 | 치과 임플란트 수술계획 수립방법 및 그 장치 |
-
2021
- 2021-10-08 KR KR1020210133915A patent/KR102673935B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102170487B1 (ko) | 2012-05-03 | 2020-10-29 | 신세스 게엠바하 | 스캐닝된 임플란트 데이터로부터의 외과용 가이드 |
| KR20200077549A (ko) * | 2017-11-02 | 2020-06-30 | 시추안 유니버시티 | 임플란트 수복 공간 분석용 측정 시스템 및 방법 |
| KR20210047015A (ko) * | 2019-10-21 | 2021-04-29 | 오스템임플란트 주식회사 | 앵커핀 식립 방법 및 이를 수행하는 임플란트 수술용 가이드 디자인 장치 |
| KR20210114223A (ko) * | 2020-03-10 | 2021-09-23 | 오스템임플란트 주식회사 | 치과 임플란트 수술계획 수립방법 및 그 장치 |
| KR102209140B1 (ko) * | 2020-08-24 | 2021-01-27 | 빙정호 | 임플란트 시술을 위한 디지털 분석 시스템 |
Non-Patent Citations (1)
| Title |
|---|
| 3Shape, Implant Studio 임플란트 시술계획 및 수술 가이드 솔루션(2018.02.13.) 1부.* * |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102673935B1 (ko) | 2024-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107106276B (zh) | 指导牙种植计划的方法、装置及其记录介质 | |
| KR101994396B1 (ko) | 단계별 보철물 디자인 방법 | |
| ES2910598T3 (es) | Método de modificación de la parte gingival de un modelo virtual de una dentadura | |
| JP6118259B2 (ja) | カスタム支台歯形成ガイドを設計及び製造するための、システム、方法、装置、並びにコンピュータ読み取り可能記憶媒体 | |
| US5556278A (en) | Method for making and using a template for a dental implant osteotomy and components relating thereto | |
| KR20190125796A (ko) | 3차원 구강 모델 분석방법 및 이를 포함하는 보철물 디자인 방법 | |
| KR102351452B1 (ko) | 교정 치료를 위한 이상적인 악궁 라인 생성 방법 및 시스템 | |
| KR20200116184A (ko) | 인공지능을 이용한 임플란트 수술 계획 수립 방법 및 이를 위한 의료영상 처리장치 | |
| KR102082414B1 (ko) | 임플란트용 힐링 어버트먼트 장착을 위한 플래닝 방법 및 이를 위한 컴퓨터 프로그램, 그 기록매체 | |
| KR101769332B1 (ko) | 치과용 서지컬 가이드 설계 방법, 이를 위한 장치, 및 이를 기록한 기록매체 | |
| KR102019601B1 (ko) | 소프트웨어를 이용한 보철물 디자인 방법 및 시스템 | |
| KR102673935B1 (ko) | 수술용 가이드 디자인 방법 및 장치 | |
| KR102410408B1 (ko) | 최적화된 어버트먼트를 제안하는 임플란트 수술용 가이드 디자인 방법 및 그 장치 | |
| EP3582716B1 (en) | Simulation method, computer program, and system for an optimized implant site, and simulated optimized implant site obtained herewith | |
| KR20220109065A (ko) | 크라운 자동 결정 방법 및 장치 | |
| KR102213097B1 (ko) | 서지컬 가이드 결정 방법, 서지컬 가이드 결정 장치 및 기록매체 | |
| KR101738924B1 (ko) | 치과용 스텐트 설계 방법, 이를 위한 장치, 및 이를 기록한 기록매체 | |
| KR102304435B1 (ko) | 앵커핀 식립 방법 및 이를 수행하는 임플란트 수술용 가이드 디자인 장치 | |
| CN118097034B (zh) | 种植牙的数据处理方法、装置、设备及介质 | |
| KR102831504B1 (ko) | 임플란트 수술용 가이드 형상 표시 방법, 컴퓨팅 장치 및 이를 위한 컴퓨터 판독 가능한 기록 매체 | |
| EP3582717B1 (en) | System and method for monitoring optimal dental implants coupleable with an optimized implant site | |
| EP3238652B1 (en) | Control guide for checking placement of at least two dental elements | |
| KR102382687B1 (ko) | 가상 치아 배열 방법 및 장치, 이를 위한 컴퓨터 판독 가능한 기록매체 | |
| KR102292188B1 (ko) | 치아 컨택 정보 표시 방법, 치아 컨택 정보 표시 장치 및 기록매체 | |
| KR102406164B1 (ko) | 치아 보철물 디자인의 코핑 변경 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |