KR20230026420A - 컨테이너 취급 차량 엘리베이터 - Google Patents
컨테이너 취급 차량 엘리베이터 Download PDFInfo
- Publication number
- KR20230026420A KR20230026420A KR1020237001715A KR20237001715A KR20230026420A KR 20230026420 A KR20230026420 A KR 20230026420A KR 1020237001715 A KR1020237001715 A KR 1020237001715A KR 20237001715 A KR20237001715 A KR 20237001715A KR 20230026420 A KR20230026420 A KR 20230026420A
- Authority
- KR
- South Korea
- Prior art keywords
- platform
- storage
- container handling
- lift
- vehicle
- Prior art date
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0414—Storage devices mechanical using stacker cranes provided with satellite cars adapted to travel in storage racks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0464—Storage devices mechanical with access from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0478—Storage devices mechanical for matrix-arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0485—Check-in, check-out devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/06—Storage devices mechanical with means for presenting articles for removal at predetermined position or level
- B65G1/065—Storage devices mechanical with means for presenting articles for removal at predetermined position or level with self propelled cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/16—Mobile or transportable lifts specially adapted to be shifted from one part of a building or other structure to another part or to another building or structure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
Abstract
본 발명은 보관 컨테이너(106)를 보관하기 위한 자동화된 보관 및 회수 시스템(1)에 관한 것이고, 컨테이너 취급 차량(201, 301)은 보관 컨테이너(106)를 보관 컬럼(105)으로부터 상승시키도록 그리고 보관 컨테이너(106)를 보관 컬럼 내로 하강시키도록, 그리고 보관 컨테이너(106)를 보관 컬럼(105) 위에서 수평으로 운송하도록 구성된다. 특히, 본 발명은, 수직 연장 지지부(612), 플랫폼(602), 및 리프트 메커니즘(604)을 갖는 컨테이너 취급 차량 엘리베이터(600)를 포함하는 그러한 시스템에 관한 것이다. 리프트 메커니즘(604)은 플랫폼(602)을 플랫폼(602)과 레일 시스템(108) 사이의 접근을 설정하는 제1 리프트 정지 위치(P1)와, 제2 리프트 정지 위치에 배열될 때 인간 운영자(800) 및/또는 로봇이 컨테이너 취급 차량(201, 301)에 대한 현장 유지 보수를 수행할 수 있도록 플랫폼(602)과 접근 지역(700) 사이의 접근을 설정하는 제2 리프트 정지 위치(P2) 사이에서 이동시키도록 배열된다.
Description
본 발명은 컨테이너를 보관 및 회수하기 위한 자동화된 보관 및 회수 시스템, 특히 컨테이너 취급 차량에 대한 유지 보수를 수행하기 위해서 컨테이너 취급 차량을 접근 지역으로 운송하기 위한 차량 엘리베이터에 관한 것이다.
도 1은 프레임워크 구조물(100)을 갖는 전형적인 종래 기술의 자동화된 보관 및 회수 시스템(1)을 개시하고, 도 2 및 도 3은 그러한 시스템(1)에서의 동작에 적절한 2개의 상이한 종래 기술의 컨테이너 취급 차량(201, 301)을 개시한다.
프레임워크 구조물(100)은 직립 부재(102), 수평 부재(103), 및 직립 부재(102)와 수평 부재(103) 사이에서 행(row)으로 배열되는 보관 컬럼(105)을 포함하는 보관 체적을 포함한다. 이러한 보관 컬럼(105) 내에서, 통(bin)으로도 알려져 있는 보관 컨테이너(106)가 서로 상하로 적층되어 적층체(107)를 형성한다. 부재(102, 103)는 전형적으로 금속, 예를 들어 압축 알루미늄 프로파일로 제조될 수 있다.
자동화된 보관 및 회수 시스템(1)의 프레임워크 구조물(100)은 프레임워크 구조물(100)의 상단부에 걸쳐 배열된 레일 시스템(108)을 포함하고, 레일 시스템(108) 상에서 복수의 컨테이너 취급 차량(201, 301)이 동작되어 보관 컨테이너(106)를 보관 컬럼(105)으로부터 상승시키고, 보관 컨테이너(106)를 보관 컬럼 내로 하강시키며, 또한 보관 컨테이너(106)를 보관 컬럼(105) 위에서 운송한다. 레일 시스템(108)은 프레임워크 구조물(100)의 상단부에 걸친 제1 방향(X)으로 컨테이너 취급 차량(201, 301)의 이동을 안내하도록 배열된 제1 세트의 평행 레일(110), 및 제1 방향(X)에 수직인 제2 방향(Y)으로 컨테이너 취급 차량(201, 301)의 이동을 안내하기 위한, 제1 세트의 레일(110)에 수직으로 배열된, 제2 세트의 평행 레일(111)을 포함한다. 컨테이너 취급 차량은 레일 시스템(108) 내의 접근 개구부(112)를 통해서 컬럼(105) 내에 보관된 컨테이너(106)에 접근한다. 컨테이너 취급 차량(201, 301)은 보관 컬럼(105) 위에서 측방향으로, 즉 수평 X-Y 평면에 평행한 평면 내에서 이동할 수 있다.
프레임워크 구조물(100)의 직립 부재(102)는, 컨테이너를 컬럼(105)으로부터 상승시키고 컨테이너를 컬럼 내로 하강시키는 동안 보관 컨테이너를 안내하기 위해서 사용된다. 컨테이너(106)의 적층체(107)는 전형적으로 자가-지지형이다.
각각의 종래 기술의 컨테이너 취급 차량(201, 301)은 차량 본체(201a, 301a), 및 X 방향 및 Y 방향 각각을 따른 컨테이너 취급 차량(201, 301)의 측방향 이동을 가능하게 하는 제1 및 제2 세트의 휠(201b, 301b, 201c, 301c)을 포함한다. 도 2 및 도 3에서, 각각의 세트 내의 2개의 휠을 완전히 확인할 수 있다. 제1 세트의 휠(201b, 301b)은 제1 세트의 레일(110) 중의 2개의 인접 레일들과 결합되도록 배열되고, 제2 세트의 휠(201c, 301c)은 제2 세트의 레일(111) 중의 2개의 인접 레일들과 결합되도록 배열된다. 제1 및 제2 세트의 휠(201b, 301b, 201c, 301c) 중 적어도 하나가 리프팅 및 하강될 수 있고, 그에 따라 제1 세트의 휠(201b, 301b) 및/또는 제2 세트의 휠(201c, 301c)이 언제든지 각각의 세트의 레일(110, 111)과 결합될 수 있다.
각각의 종래 기술의 컨테이너 취급 차량(201, 301)은 또한 보관 컨테이너(106)의 수직 운송을 위한, 예를 들어 보관 컨테이너(106)를 보관 컬럼(105)으로부터 상승시키고 보관 컨테이너(106)를 보관 컬럼 내로 하강시키기 위한 리프팅 장치(미도시)를 포함한다. 리프팅 장치는 하나 이상의 파지/결합 장치를 포함하고, 그러한 파지/결합 장치는 보관 컨테이너(106)와 결합되도록 구성되고, 그러한 파지/결합 장치는 차량(201, 301)으로부터 하강될 수 있고, 그에 따라 차량(201, 301)에 대한 파지/결합 장치의 위치가, 제1 방향(X) 및 제2 방향(Y)에 수직인, 제3 방향(Z)으로 조정될 수 있다. 컨테이너 취급 차량(301)의 파지 장치의 일부가 참조 번호 304로 표시되어 도 3에 도시되어 있다. 컨테이너 취급 장치(201)의 파지 장치는 도 2에서 차량 본체(201a) 내에 위치된다.
통상적으로 그리고 또한 본원의 목적을 위해서, Z=1은 보관 컨테이너의 최상부 층, 즉 레일 시스템(108) 바로 아래의 층을 나타내고, Z=2는 레일 시스템(108) 아래의 2번째 층, 그리고 Z=3은 3번째 층 등을 나타낸다. 도 1에 개시된 종래 기술에서, Z=8은 보관 컨테이너의 최하부의 하단 층을 나타낸다. 유사하게, X=1…n 및 Y=1…n은 수평 평면 내의 각각의 보관 컬럼(105)의 위치를 나타낸다. 결과적으로, 예로서, 그리고 도 1에 표시된 데카르트 좌표계(X, Y, Z)를 이용하면, 도 1에서 106'으로 표시된 보관 컨테이너는 X=10, Y=2, Z=3의 보관 위치를 점유한다고 할 수 있다. 컨테이너 취급 차량(201, 301)이 층(Z=0) 내에서 이동된다고 할 수 있고, 각각의 보관 컬럼(105)은 그 X 및 Y 좌표에 의해서 표시될 수 있다.
프레임워크 구조물(100)의 보관 체적은 종종 그리드(104)로 지칭되고, 이러한 그리드 내의 가능한 보관 위치는 보관 셀로 지칭된다. 각각의 보관 컬럼은 X- 및 Y-방향을 따른 위치에 의해서 표시될 수 있는 한편, 각각의 보관 셀은 X-, Y- 및 Z-방향을 따른 컨테이너 번호에 의해서 표시될 수 있다.
각각의 종래 기술의 컨테이너 취급 차량(201, 301)은, 보관 컨테이너(106)를 레일 시스템(108)을 가로질러 운송할 때 보관 컨테이너(106)를 수용 및 수납하기 위한 보관 격실 또는 공간을 포함한다. 보관 공간은, 도 2에 도시된 바와 같은 그리고 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같은, 차량 본체(201a) 내의 중앙에 배열된 공동을 포함할 수 있다.
도 3은 캔틸레버 구성을 갖는 컨테이너 취급 차량(301)의 대안적인 구성을 도시한다. 그러한 차량은, 기재 내용이 또한 본원에서 참조로 포함되는 예를 들어 NO317366에 구체적으로 설명되어 있다.
도 2에 도시된 중앙 공동 컨테이너 취급 차량(201)은, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같이, 보관 컬럼(105)의 측방향 범위와 일반적으로 동일한 X 및 Y 방향을 따른 치수를 가지는 면적을 커버하는 풋프린트(footprint)를 가질 수 있다. 본원에서 사용된 '측방향'이라는 용어는 '수평'을 의미할 수 있다.
대안적으로, 중앙 공동 컨테이너 취급 차량(201, 301)은, 예를 들어 WO2014/090684A1에 개시된 바와 같이, 보관 컬럼(105)에 의해서 형성된 측방향 면적보다 큰 풋프린트를 가질 수 있다.
레일 시스템(108)은 전형적으로, 차량의 휠이 내부에서 주행하는 홈을 갖는 레일을 포함한다. 대안적으로, 레일은 상향 돌출 요소를 포함할 수 있고, 차량의 휠은 레일 이탈을 방지하기 위한 플랜지를 포함한다. 이러한 홈 및 상향 돌출 요소는 집합적으로 트랙으로서 알려져 있다. 각각의 레일은 하나의 트랙을 포함할 수 있거나, 각각의 레일은 2개의 평행한 트랙들을 포함할 수 있다.
기재 내용이 본원에서 참조로 포함되는 WO2018146304는, X 및 Y 방향 모두를 따라서 평행한 트랙 및 레일을 포함하는 레일 시스템(108)의 전형적인 구성을 도시한다.
프레임워크 구조물(100) 내에서, 컬럼(105)의 대부분은 보관 컬럼(105)이고, 즉 보관 컨테이너(106)가 적층체(107)로 보관되는 컬럼(105)이다. 그러나, 일부 컬럼(105)이 다른 목적을 가질 수 있다. 도 1에서, 컬럼(119 및 120)은, 프레임워크 구조물(100)의 외부로부터 보관 컨테이너(106)에 접근할 수 있는 또는 보관 컨테이너가 프레임워크 구조물(100)의 내외로 전달될 수 있는 접근 스테이션(미도시)으로 운송될 수 있도록, 보관 컨테이너(106)를 드롭 오프(drop off) 및/또는 픽업(pick up)하기 위해서 컨테이너 취급 차량(201, 301)에 의해서 이용되는 그러한 특별한-목적의 컬럼이다. 당업계에서, 그러한 위치는 일반적으로 '포트'로 지칭되고, 포트가 내부에 위치되는 컬럼은 '포트 컬럼'(119, 120)으로 지칭될 수 있다. 접근 스테이션으로의 운송은 임의의 방향일 수 있고, 즉 수평, 틸팅, 및/또는 수직일 수 있다. 예를 들어, 보관 컨테이너(106)는 프레임워크 구조물(100) 내에서 무작위적인 또는 지정된 컬럼(105) 내에 배치될 수 있고, 이어서 임의의 컨테이너 취급 차량에 의해서 픽업될 수 있고, 접근 스테이션으로의 추가적인 운송을 위해서 포트 컬럼(119, 120)으로 운송될 수 있다. '틸팅된'이라는 용어는 수평과 수직 사이의 일반적인 운송 배향을 가지는 보관 컨테이너(106)의 운송을 의미한다는 것에 주목하여야 한다.
도 1에서, 제1 포트 컬럼(119)은 예를 들어, 컨테이너 취급 차량(201, 301)이 접근 또는 전달 스테이션으로 운송하기 위한 보관 컨테이너(106)를 드롭 오프시킬 수 있는, 지정된 드롭-오프 포트 컬럼일 수 있고, 제2 포트 컬럼(120)은, 접근 또는 전달 스테이션으로부터 운송된 보관 컨테이너(106)를 컨테이너 취급 차량(201, 301)이 픽업할 수 있는 지정된 픽업 포트 컬럼일 수 있다.
접근 스테이션은 전형적으로, 제품 아이템이 보관 컨테이너(106)로부터 제거되거나 그 내부에 배치되는 선택(picking) 또는 보관 스테이션일 수 있다. 선택 또는 보관 스테이션에서, 보관 컨테이너(106)는 일반적으로 자동화된 보관 및 회수 시스템(1)으로부터 제거되지 않고, 다시 접근되는 경우에 프레임워크 구조물(100) 내로 복귀된다. 포트가 또한 보관 컨테이너를 다른 보관 시설(예를 들어, 다른 프레임워크 구조물 또는 다른 자동화된 보관 및 회수 시스템)로, 운송 차량(예를 들어, 기차 또는 대형 트럭)으로, 또는 생산 시설로 전달하기 위해서 사용될 수 있다.
컨베이어를 포함하는 컨베이어 시스템을 일반적으로 이용하여, 보관 컨테이너를 포트 컬럼(119, 120)과 접근 스테이션 사이에서 운송한다.
포트 컬럼(119, 120) 및 접근 스테이션이 상이한 레벨들에 위치되는 경우에, 컨베이어 시스템은, 보관 컨테이너(106)를 포트 컬럼(119, 120)과 접근 스테이션 사이에서 수직으로 운송하기 위한 수직 구성요소를 갖춘 리프트 장치를 포함할 수 있다.
컨베이어 시스템은, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2014/075937A1에 설명된 바와 같이, 보관 컨테이너(106)를 상이한 프레임워크 구조물들 사이에서 전달하도록 배열될 수 있다.
도 1에 개시된 컬럼(105) 중 하나 내에 보관된 보관 컨테이너(106)에 접근할 때, 컨테이너 취급 차량(201, 301) 중 하나는 목표 보관 컨테이너(106)를 그 위치로부터 회수하도록 그리고 이를 드롭-오프 포트 컬럼(119)으로 운송하도록 명령을 받는다. 이러한 동작은, 컨테이너 취급 차량(201, 301)을, 목표 보관 컨테이너(106)가 내부에 배치되는 보관 컬럼(105) 위의 위치로 이동시키는 것, 컨테이너 취급 차량의 리프팅 장치(미도시)를 이용하여 보관 컨테이너(106)를 보관 컬럼(105)으로부터 회수하는 것, 그리고 보관 컨테이너(106)를 드롭-오프 포트 컬럼(119)으로 운송하는 것을 포함한다. 목표 보관 컨테이너(106)가 적층체(107) 내에 깊이 위치되는 경우에, 즉 목표 보관 컨테이너(106) 위에 하나의 또는 복수의 다른 보관 컨테이너(106)가 배치된 경우에, 동작은 또한, 목표 보관 컨테이너(106)를 보관 컬럼(105)으로부터 리프팅시키기 전에, 위에-배치된 보관 컨테이너를 일시적으로 이동시키는 것을 포함한다. 당업계에서 종종 "디깅(digging)"으로 지칭되는 이러한 단계는, 목표 보관 컨테이너를 드롭-오프 포트 컬럼(119)으로 운송하기 위해서 추후에 이용되는 동일한 컨테이너 취급 차량을 이용하여, 하나 또는 복수의 다른 협력 컨테이너 취급 차량을 이용하여 수행될 수 있다. 대안적으로 또는 부가적으로, 자동화된 보관 및 회수 시스템(1)은, 보관 컨테이너(106)를 보관 컬럼(105)으로부터 일시적으로 제거하는 과제를 위해서 특별히 지정된 컨테이너 취급 차량(201, 301)을 가질 수 있다. 목표 보관 컨테이너(106)가 보관 컬럼(105)으로부터 제거되면, 일시적으로 제거된 보관 컨테이너(106)가 원래의 보관 컬럼(105) 내로 재배치될 수 있다. 그러나, 대안적으로, 제거된 보관 컨테이너(106)가 다른 보관 컬럼(105)으로 재배치될 수 있다.
보관 컨테이너(106)를 컬럼(105) 중 하나 내에 보관하고자 할 때, 컨테이너 취급 차량(201, 301) 중 하나는, 보관 컨테이너(106)를 픽업 포트 컬럼(120)으로부터 픽업하도록 그리고 이를 보관하고자 하는 보관 컬럼(105) 위의 위치로 운송하도록 명령을 받는다. 보관 컬럼 적층체(107) 내의 목표 위치에 또는 그 위에 배치된 임의의 보관 컨테이너(106)가 제거된 후에, 컨테이너 취급 차량(201, 301)은 보관 컨테이너(106)를 희망 위치에 배치한다. 이어서, 제거된 보관 컨테이너(106)는 보관 컬럼(105) 내로 다시 하강될 수 있거나, 다른 보관 컬럼(105)으로 재배치될 수 있다.
자동화된 보관 및 회수 시스템(1)을 모니터링 및 제어하기 위해서, 자동화된 보관 및 회수 시스템(1)은 제어 시스템(500)을 포함하고, 이러한 제어 시스템은 일반적으로 컴퓨터화되고 일반적으로 보관 컨테이너(106)를 계속 추적하기 위한 데이터베이스를 포함한다. 자동화된 보관 및 회수 시스템(1)을 모니터링 및 제어하는 것은, 컨테이너 취급 차량(201, 301)이 서로 충돌하지 않고 희망 보관 컨테이너(106)가 희망 시간에 희망 위치로 전달될 수 있도록, 프레임워크 구조물(100) 내의 각각의 보관 컨테이너(106)의 위치, 각각의 보관 컨테이너(106)의 내용물, 및 컨테이너 취급 차량(201, 301)의 이동을 모니터링 및 제어하는 것을 포함할 수 있다.
알려진 자동화된 보관 및 회수 시스템의 문제는 특히, 공간 효율적/절감적이고 전체 시스템을 중단시키지 않는, 고장 컨테이너 취급 차량에 대한 서비스 수행이 어렵다는 것이다.
예를 들어 고장 차량의 목적지에 도달하도록 서비스 작업자에 의해서 수동적으로 구동될 수 있는 서비스 차량을 이용하는 것에 의해서, 보관 컬럼 위의 레일 시스템 상에 배열될 때 고장 컨테이너 취급 차량의 위치에서 운영자에 의해서 현장 서비스를 수행하는 것이 알려져 있다. 다른 실시형태에서, 서비스 차량은 고장 차량을 픽업할 수 있고, 이를 자동화된 보관 및 회수 시스템의 프레임워크 구조물의 레일 시스템과 같은 레벨의 서비스 지역으로 운송할 수 있다.
그러나, 그러한 기능은, 서비스 차량이, 고장 컨테이너 취급 차량의 레일 시스템과 같은 레벨로 배열되고 바람직하게 프레임워크 구조물의 레일 시스템과 정렬된 레일 상에 배열된 지역으로부터, 고장 컨테이너 취급 차량의 레일 시스템 상으로 구동할 수 있을 것을 요구하고, 이는 프레임워크 구조물의 레일 시스템의 레벨에서 서비스 차량 및 차량을 서비스하기 위한 장비를 보관하기 위한 큰 면적을 요구한다.
또한, 언급된 활동은 시스템의 전체 기능의 불필요한 지연을 유발할 수 있는데, 이는, 운영자가 고장 컨테이너 취급 차량에 대한 현장 서비스를 수행하도록 및/또는 서비스 차량이 레일 시스템 상에서 안전하게 이동하도록, 동작 컨테이너 취급 차량이 중단되어야 할 수 있기 때문이다.
전술한 것에 비추어 볼 때, 종래 기술의 보관 및 회수 시스템의 이용과 관련된 전술한 문제 중 하나 이상을 해결하거나 적어도 완화하는, 자동화된 보관 및 회수 시스템 및 그 방법을 제공하는 것이 바람직할 수 있다.
따라서, 본 발명의 목적은 공간 효율적인 보관 및 회수 시스템을 제공하는 것이다. 보관 및 회수 시스템은 예를 들어 서비스 차량 및/또는 고장 컨테이너 취급 차량을 서비스하기 위한 장비를 보관 및 회수 시스템의 프레임워크 구조물의 레일 시스템의 레벨에 배열하기 위한 큰 면적 및/또는 중이층(mezzanine)을 필요로 하지 않는다.
본 발명의 추가적인 목적은, 컨테이너 취급 차량이 시스템의 레일 시스템에 용이하게 부가될 수 있거나 그로부터 제거될 수 있는, 보관 및 회수 시스템을 제공하는 것이다.
또한, 본 발명의 목적은 고장 컨테이너 취급 차량에 접근하기 위한 안전 시스템을 제공하여, 특히 서비스 작업자를 위한 안전한 작업 환경을 제공하는 것이다.
본 발명은 독립 청구항에 기재되어 있고 특성화되는 한편, 종속 청구항은 본 발명의 다른 특성을 설명한다.
본 발명의 일 양태는, 보관 컨테이너들을 수직 적층체로 서로 상하로 보관하기 위한 다수의 보관 컬럼을 포함하는 보관 그리드를 형성하도록 배열된 복수의 내부 및 주변 직립 부재를 가지는 프레임워크 구조물을 포함하는 자동화된 보관 및 회수 시스템에 관한 것이다. 직립 부재들은, 적어도 하나의 컨테이너 취급 차량을 위에서 안내하도록 배열된 레일 시스템에 의해서 그 상부 단부들에서 상호 연결된다. 컨테이너 취급 차량(들)은 보관 컨테이너를 보관 컬럼으로부터 상승시키도록, 그리고 보관 컨테이너를 보관 컬럼 내로 하강시키도록 그리고 보관 컨테이너를 보관 컬럼 위로 수평으로 운송하도록 구성된다. 프레임워크 구조물의 주변 직립 부재는 프레임워크 구조물의 수평 주변부를 형성한다.
레일 시스템은 수평 평면 내에 배열되고 제1 방향(X)으로 연장되는 제1 세트의 평행 레일, 및 수평 평면 내에 배열되고 제1 방향(X)에 직각인 제2 방향(Y)으로 연장되는 제2 세트의 평행 레일을 포함할 수 있다. 제1 및 제2 세트의 레일은 복수의 인접 그리드 셀을 포함하는 수평 평면 내의 그리드 패턴을 형성하고, 각각의 그리드 셀은 제1 세트의 레일의 인접 레일의 쌍 및 제2 세트의 레일의 인접 레일의 쌍에 의해서 형성된 그리드 개구부를 포함한다. 각각의 보관 컬럼은 그리드 개구부 수직 아래에 위치된다. 전술한 바와 같이, 컨테이너 취급 차량(들)은, 그리드 개구부를 통해서 보관 컨테이너에 접근하기 위해서 보관 컬럼 위의 레일 시스템 상에서 측방향으로 이동하도록 구성된다.
또한, 자동화된 보관 및 회수 시스템은 컨테이너 취급 차량을 운송하기 위한 차량 엘리베이터를 포함한다. 차량 엘리베이터는 수직 연장 지지부, 플랫폼, 및 리프트 메커니즘을 포함한다. 플랫폼은 컨테이너 취급 차량(들)을 이송/지지하도록 배열된 수평 연장(즉 레일 시스템에 의해서 설정된 평면에 평행한) 구조물, 및 플랫폼을 수직 연장 지지부에 이동 가능하게 부착하는 연결 장치를 포함한다. 차량 엘리베이터는 또한, 플랫폼을 플랫폼과 레일 시스템 사이의 접근을 설정하는 제1 리프트 정지 위치와, 컨테이너 취급 차량이 플랫폼 상에 배열되어 있는 동안 인간 운영자/서비스 작업자 및/또는 로봇이 컨테이너 취급 차량에 대한 현장 유지 보수를 수행할 수 있도록 접근 지역 내에 배열되는 제2 리프트 정지 위치 사이에서 이동시키도록 배열되는 리프트 메커니즘을 포함한다. 제1 및 제2 리프트 정지 위치는, 예를 들어 프레임워크 구조물의 바닥 레벨과 레일 시스템 사이에서, 수직으로 오프셋되어 배열된다.
전술한 레일 시스템의 상단부 상에서 일을 하는 동작 가능 컨테이너 취급 차량이 정상적으로 작동하지 못하고 그에 따라 유지 보수 또는 서비스를 필요로 하는 경우에, 고장 컨테이너 취급 차량은, 플랫폼이 제1 리프트 정지 위치에 배열될 때, 레일 시스템 상의 그 위치로부터 차량 엘리베이터의 플랫폼 상으로 이동할 수 있거나 이동될 수 있다. 이어서, 고장 컨테이너 취급 차량은 접근 지역의 제2 리프트 정지 위치로 운송될 수 있고, 여기에서 인간 운영자 및/또는 로봇이 제2 리프트 정지 위치의 현장에서 컨테이너 취급 차량에 대한 유지 보수 또는 서비스를 수행할 수 있다. 유지 보수가 수행된 후에, 컨테이너 취급 차량은 제1 리프트 정지 위치로 복귀될 수 있고, 그에 따라 차량은 보관 그리드의 레일 시스템 상으로 다시 이동될 수 있다.
컨테이너 취급 차량의 손상이 심각한 경우에, 즉 서비스가 제2 리프트 정지 위치의 현장에서 수행될 수 없는 경우에, 컨테이너 취급 차량은 인간 운영자 및/또는 로봇의 도움으로 제2 리프트 정지 위치로부터 예를 들어 컨테이너 취급 차량을 서비스 지역으로 이동시키기 위한 트롤리 또는 유사물 상으로 제거될 수 있다. 이어서, 다른 작동 컨테이너 취급 차량은 인간 운영자 및/또는 로봇의 도움으로 제2 리프트 정지 위치로 이동될 수 있고, 이어서 작동 컨테이너 취급 차량이 프레임워크 구조물의 레일 시스템 상으로 이동할 있도록 차량 엘리베이터에 의해서 제1 리프트 정지 위치로 이동될 수 있다.
차량 엘리베이터의 수직 연장 지지부는 차량 엘리베이터의 플랫폼을 안내하기 위한 적어도 2개의 안내 레일을 포함할 수 있다. 플랫폼의 연결 장치는, 안내 레일에 이동 가능하게 부착되어 플랫폼이 수직 방향(Z)으로, 즉 레일 시스템에 의해서 설정된 X-Y 평면에 수직으로 이동할 수 있게 하는, 선형 베어링 또는 롤러를 포함할 수 있다.
플랫폼의 수평 연장 구조물은 수평 연장 구조물에 고정된 하부 지지 구조물을 포함할 수 있다. 하부 지지 구조물은 (예를 들어, 휠을 통해서) 안내 레일에 이동 가능하게 부착된 연결 장치에 고정된 수직 연장 구조물을 포함할 수 있고, 그에 따라 컨테이너 취급 차량이 플랫폼 상에 배열될 때 지지를 제공할 수 있다.
차량 엘리베이터의 플랫폼의 수평 구조물은 플랫폼 레일 배열체(platform rail arrangement)를 포함할 수 있다. 플랫폼 레일 배열체는, 플랫폼 레일 배열체가 레일 시스템과 수직으로 동일 레벨에 있고 플랫폼이 제1 리프트 정지 위치에 있을 때 컨테이너 취급 차량이 플랫폼 레일 배열체와 레일 시스템 사이에서 이동할 수 있게 허용하도록 구성된 적어도 하나의 평행 레일의 세트를 가질 수 있다. 따라서, 플랫폼 레일 배열체는 이러한 위치에서 프레임워크 구조물의 레일 시스템의 레일과 수직으로 정렬된다.
리프트 메커니즘은 단순한 통상적인 수동적 호이스트/풀리 시스템 또는 전기 호이스트/풀리 시스템일 수 있다. 리프트 메커니즘은 예를 들어 플랫폼을 리프팅하기 위해서 윈치 및 케이블을 포함할 수 있다. 리프트 메커니즘은 플랫폼에 연결된 케이블 또는 와이어를 갖는 차량 엘리베이터의 수직 연장 지지부의 상부 단부에 배열될 수 있다. 호이스트/풀리 시스템 및 윈치 모두는 컨테이너 취급 차량(들)을 동작시키는 제어 시스템과 같은 제어 시스템과 신호 통신하는 전송기를 이용하여 자동화될 수 있다.
본 발명의 시스템은, 플랫폼이 제1 리프트 정지 위치로부터 멀리 배치될 때 컨테이너 취급 차량이 제1 리프트 정지 위치로 진입하는 것을 방지하도록 그리고 플랫폼이 제1 리프트 정지 위치에 배열될 때 컨테이너 취급 차량이 플랫폼에 진입할 수 있게 허용하도록 구성된 이동 가능 장벽을 더 포함할 수 있다. 이동 가능 장벽은 예를 들어 빔 장벽, 활주 가능한 게이트의 형태일 수 있거나, 이는 수직 방향으로 이동할 수 있는 차단 구조물일 수 있다.
추가적인 예시적 실시형태에서, 차량 엘리베이터는, 컨테이너 취급 차량이 플랫폼 상에서 이송될 때 컨테이너 취급 차량의 대향 측면들 주위에 도달하도록/프레임화하도록(frame)/둘러싸도록 배열된 리프트 프레임을 포함할 수 있다. 리프트 프레임은 예를 들어 리프트 메커니즘의 케이블 또는 와이어에 연결되어 플랫폼을 리프팅할 수 있다.
플랫폼을 리프팅시키기 위해서, 리프트 프레임을 이용하여 예를 들어 윈치의 케이블에 의해서 플랫폼을 리프트 메커니즘에 매달 수 있다. 리프트 메커니즘의 케이블 또는 와이어는, 컨테이너 취급 차량이 플랫폼 상에 배열될 때, 플랫폼을 플랫폼의 중력 중심에 또는 그 부근에 배열된 리프트 프레임의 매달기 지점으로부터 리프팅시킬 수 있다. 또한, 리프트 프레임이 컨테이너 취급 차량의 주위에서 연장될 수 있기 때문에, 이는, 플랫폼을 제1 및 제2 리프트 정지 위치들 사이에서 이동시킬 때, 컨테이너 취급 차량을 플랫폼 상에서 확실하게 유지하는 것과 관련하여 안정성을 제공할 수 있다.
예시적인 실시형태에서, 리프트 프레임은 컨테이너 취급 차량을 위한 통로를 형성할 수 있다. 리프트 프레임은 플랫폼의 외부 주변부의 대향 측면들로부터 연장되는 2개의 수직 배열 기둥(pole)을 포함할 수 있다. 2개의 기둥은, 매달기 지점을 갖는 수평 배열 빔에 의해서, 플랫폼으로부터의 그 원위 단부들에서 상호 연결될 수 있다.
다른 예시적인 실시형태에서, 플랫폼은, 제1 및 제2 리프트 정지 위치들 사이에서 이동될 때, 샤프트 내에 배열될 수 있다. 샤프트는 컨테이너 취급 차량이 플랫폼의 외부로 낙하되는 것을 방지하도록 구성될 수 있다.
샤프트는, 제1 및 제2 리프트 정지 위치들 사이에서 이동할 때 플랫폼을 둘러싸는 커버일 수 있다. 또한, 샤프트는 상부 리프트 정지 위치를 둘러싸서, 컨테이너 취급 차량이 상부 리프트 정지 위치에서 플랫폼 상으로 또는 그로부터 멀리 이동할 때, 컨테이너 취급 차량이 낙하되는 것을 방지한다.
본 발명의 시스템은 도어와 같은 차폐부를 더 포함할 수 있고, 이러한 차폐부는 차폐부가 폐쇄될 때 제2 리프트 정지 위치에 접근하는 것을 차단하도록 배열된다. 또한, 차폐부는, 플랫폼이 제2 리프트 위치에 도달한 후에만, 개방될 수 있다.
차폐부는 이동 가능 장벽이 폐쇄 위치에 있을 때에만 개방될 수 있도록 추가적으로 구성될 수 있고, 그에 의해서 컨테이너 취급 차량이 상부 리프트 정지 위치로 진입하는 것을 방지할 수 있다.
또한, 차량 엘리베이터는, 플랫폼이 상부 및 하부 리프트 정지 위치들 사이에서 이동하는 동안 그리고 플랫폼이 제1 리프트 정지 위치에 배열되어 있는 동안, 차폐부가 폐쇄되어 작업자가 하부 리프트 정지 위치에 진입하는 것을 방지하는 중에만 동작될 수 있다.
본 발명의 시스템은, 프레임워크 구조물 상에 제공되고 플랫폼이 제1 리프트 정지 위치에 배열될 때 플랫폼을 레일 시스템과 수직 정렬되는 설정 높이에서 록킹 또는 유지하도록 배열되는, 록킹 메커니즘(locking mechanism)을 더 포함할 수 있다.
록킹 메커니즘은, 차량 엘리베이터가 동작 가능할 때 해제 가능하게 개방될 수 있는, 제1 리프트 정지 위치에 배열될 때 플랫폼에 대한 변위 가능한 캐치/체결부(displaceable catch/fastener)를 제공하는 임의의 배열체일 수 있다. 변위 가능 캐치는 작동 볼트, 래치 또는 러그일 수 있거나, 이는, 프레임워크 구조물의 수평 주변부 상에 배열된 편향된 폴(biased pawl)을 록킹 및 언록킹하도록 배열되는, 플랫폼 상에 배치된 브라켓을 포함할 수 있다. 폴은 예를 들어 스프링 편향되거나 중력 편향될 수 있다.
자동화된 보관 및 회수 시스템의 동작 중에, 인간 운영자가 레일 시스템에 접근할 필요가 있는 오류가 발생될 수 있다. 이는, 예를 들어 고장 컨테이너 취급 차량이 차량 엘리베이터로 이동할 수 없는 경우에, 필요할 수 있다.
따라서, 본 발명의 예시적인 실시형태에서, 시스템은 인간 운영자가 레일 시스템에 접근하는 것을 허용하는 계단/사다리 또는 유사물을 더 포함할 수 있다.
계단은 접근 지역의 레벨/바닥 레벨로부터 레일 시스템의 레벨까지 걸쳐 질 수 있고, 2개의 레벨들은 수직으로 오프셋되어 배열된다.
계단은 유리하게 차량 엘리베이터 부근에, 예를 들어 차량 엘리베이터에 인접하여 배열될 수 있고, 그에 의해서 인간 운영자가 고장 컨테이너 취급 차량을 레일 시스템의 레벨에서 엘리베이터에 공급할 수 있게 한다.
시스템이 가능한 한 콤팩트하여야 함에 따라, 차량 엘리베이터 및 계단이 자동화된 보관 및 회수 시스템의 가능한 한 작은 공간을 점유하는 것이 유리할 수 있다.
작업자가 다칠 위험을 줄이기 위해서, 시스템이 중단된 후에만, 인간 운영자가 계단에 접근할 수 있어야 한다. 따라서, 도어 또는 게이트와 같은 차폐부가 계단에 근접 배열되어, 시스템의 동작 중에 인간 운영자가 계단에 접근하는 것을 방지할 수 있고, 시스템이 중단된 때 접근을 가능하게 할 수 있다.
레일 시스템 및/또는 레일 시스템 레벨의 계단은 동작 컨테이너 취급 차량이 계단에 진입하는 것을 방지하는 장벽을 포함할 수 있다.
부가적으로 또는 대안적으로, 컨테이너 취급 차량이 계단에 진입하는 것을 방지하도록, 계단은 컨테이너 취급 차량의 임의의 폭보다 더 좁게 구축될 수 있다.
부가적으로 또는 대안적으로, 레일 시스템의 레일의 위치에 의해서 컨테이너 취급 차량이 계단에 진입하지 못하도록, 계단이 배열될 수 있다.
예시적인 실시형태에서, 차량 엘리베이터 및 계단 모두가 프레임워크 구조물에 통합될 수 있다. 예를 들어, 차량 엘리베이터 및 계단이 3 x 3개의 보관 컬럼의 면적을 차지할 수 있다.
본 발명의 다른 예시적인 실시형태에 따라, 차량 리프트 상의 컨테이너 취급 차량에 접근하기 위한 접근 지역은 보관 그리드 위의 바닥/층(story)에 또는 내에 배열될 수 있다. 이러한 실시형태에서, 제1 리프트 정지 위치는 수직으로 제2 리프트 정지 위치 아래에 배열되고, 차량 엘리베이터는 보관 그리드 위의 바닥의 바닥 개구부를 통과한다. 접근 지역은 그에 따라, 본원에 참조로 포함된 WO 2019/238661 A1의 도 6a에 개시된 바와 같이 접근 스테이션에 접근하는 인간 운영자의 레벨과 유사한 레벨에 배열될 수 있다.
다른 예시적인 실시형태에서, 접근 지역은, 본원에 참조로 포함된 WO 2014/075937 A1의 도 2에 도시된 전달 스테이션의 배열체와 유사하게 보관 그리드 아래의 바닥/층에 배열될 수 있다. 이러한 예시적인 실시형태에서, 프레임워크 구조물은, 보관 그리드 아래의 도시된 전달 스테이션의 레벨에 배열될 수 있는 접근 지역 바로 위에 배열될 수 있다. 이러한 실시형태에서, 차량 엘리베이터는 프레임워크의 피트(pit) 내에 배열될 수 있거나 프레임워크 구조물의 주변부로부터 돌출될 수 있다.
또 다른 예시적인 실시형태에서, 예를 들어 쿼드의 중앙 코트야드와 같이, 접근 지역이 보관 그리드 환경 내의 영역에 배열되도록, 접근 지역은 보관 그리드 환경의 영역 내에 배열될 수 있다.
또한 추가적인 예시적 실시형태에서, 차량 엘리베이터는 프레임워크 구조물의 보관 그리드의 외부 주변부로부터 돌출될 수 있다. 따라서, 접근 지역이 프레임워크 구조물의 보관 그리드의 외부 주변부 외측에 배열되도록, 플랫폼의 수평 연장 구조물은 보관 그리드의 외부 주변부의 외측으로 돌출될 수 있거나 그 외측에서 수평 연장부를 가질 수 있다.
제2 리프트 정지 위치가 수직으로 제1 리프트 정지 위치 아래에 배열되는 실시형태에서, 수직 연장 지지부는, 차량 엘리베이터의 플랫폼을 제1 및 제2 리프트 정지 위치들 사이에서 수직 방향(Z)으로 안내하기 위한 안내 레일로서의 역할을 하는 프레임워크 구조물의 복수의 주변 직립 부재 중 적어도 2개를 포함할 수 있다.
그러한 실시형태에서, 이동 가능 장벽은 수직 방향(Z)으로 장벽을 이동시키는 이동 가능 장벽을 위한 안내 레일로서의 역할을 하는 프레임워크 구조물의 동일 주변 직립 부재에 부착될 수 있다.
또한, 이동 가능 장벽은 차량 엘리베이터의 플랫폼의 연결 장치와 동일하거나 유사한 구성을 가지는 연결 장치를 포함할 수 있다.
또한, 플랫폼이 제1 리프트 정지 위치에 배열될 때 이동 가능 장벽이 컨테이너 취급 차량의 플랫폼 진입을 허용하도록, 리프트 프레임은 이동 가능 장벽과 결합되어 이를 리프팅시키도록 구성될 수 있다.
리프트 프레임의 빔은 예를 들어, 플랫폼이 상부 리프트 정지 위치에 진입할 때, 이동 가능 장벽을 상부 리프트 정지 위치로부터 멀리 밀도록 구성될 수 있다. 이동 가능 장벽은 이동 가능 장벽의 기부로부터 연장되는 수평 막대를 포함할 수 있다. 플랫폼이 컨테이너 취급 차량을 이송하는지 또는 그렇지 않은 지와 관계 없이, 빔이 제1 리프트 정지 위치에 또는 그 위에 배열될 때, 막대는 리프트 프레임의 빔에 기대어 질 수 있다. 따라서, 리프트 프레임의 빔이 이동 가능 장벽의 막대와 결합되어, 플랫폼이 제1 정지 위치로 위쪽으로 호이스트 작업될 때, 이동 가능 장벽을 위쪽으로 변위시킨다. 또한, 리프트 프레임을 포함하는 플랫폼이 제2 리프트 정지 위치를 향해서 하강될 때, 이동 가능 장벽은 제1 리프트 정지 위치의 레벨/높이까지 또는 그 부근까지 하강된다. 또한, 예를 들어 반대 방향으로 연장되는, 전술한 수평 막대의 연신부/연장부인 휴지 구조물(resting structure)이 이동 가능 장벽의 기부에 배열될 수 있고, 이는 프레임워크 구조물의 레일 시스템 상에 놓일 수 있고, 그에 의해서 이동 가능 장벽이 레일 시스템의 높이/레벨 아래로 이동하는 것을 방지할 수 있다. 장벽의 휴지 구조물이 레일 시스템 상에 놓일 때, 장벽은 레일 시스템 상의 동작 컨테이너 취급 차량이 제1 리프트 정지 위치에 진입하는 것을 방지한다.
제2 양태에서, 본 발명은 전술한 자동화된 보관 및 회수 시스템의 동작 방법에 관한 것이다. 방법은 컨테이너 취급 차량을 레일 시스템으로부터, 제1 리프트 위치에 배치된 플랫폼 상으로 이동시키는 단계, 그리고 이어서 플랫폼을 제2 리프트 정지 위치로 이동시켜 컨테이너 취급 차량(들)에 대한 현장 유지 보수를 수행할 수 있도록 인간 운영자(들) 및/또는 로봇(들)에 대한 접근을 가능하게 하는 단계를 포함한다.
시스템이 전술한 록킹 메커니즘을 포함하는 경우에, 방법은, 제1 리프트 정지 위치에 배열될 때, 플랫폼을 레일 시스템과의 수직 정렬로 록킹하는 초기 단계를 더 포함할 수 있다.
"수직 오프셋"이라는 용어는 수직 방향(Z)으로 거리를 가지는 것을 이해되어야 한다.
"접근 지역"이라는 용어는, 적어도 제2 리프트 정지 위치 및 컨테이너 취급 차량의 서비스/유지 보수를 수행하는 인간 운영자 및/또는 로봇이 위치하는 지역을 포함하는 지역으로서 이해되어야 한다.
개시된 차량 엘리베이터가 하나 이상의 컨테이너 취급 차량을 이송/지지하도록 배열된다고 설명된 경우에도, 본 발명은 또한 고장 컨테이너 취급 차량을 서비스하도록 및/또는 고장 컨테이너 취급 차량을 운송하도록 의도된 하나 이상의 서비스 차량(들)을 이송하기에 또한 적합하다는 것을 이해하여야 한다. 따라서, 차량 엘리베이터는 고장 컨테이너 취급 차량에 대한 현장 서비스를 수행하기 위해서 유인 또는 무인 서비스 차량을 이송하는데, 및/또는 고장 컨테이너 취급 차량을 픽업하고 이송할 수 있는 유인 또는 무인 서비스 차량을 이송하는데 적합할 수 있다.
이하의 도면은 본 발명의 이해를 돕기 위해서 첨부된 것이다. 도면은, 단지 예로서 이제 설명할 본 발명의 실시형태를 도시한다.
도 1은 종래 기술의 자동화된 보관 및 회수 시스템의 프레임워크 구조물의 사시도이다.
도 2는 보관 컨테이너를 내부에서 이송하기 위한 중앙 배열 공동을 가지는 종래 기술의 컨테이너 취급 차량의 사시도이다.
도 3은 보관 컨테이너를 아래에서 이송하기 위한 캔틸레버를 가지는 종래 기술의 컨테이너 취급 차량의 사시도이다.
도 4는 본 발명에 따른 자동화된 보관 및 회수 시스템의 예시적인 실시형태의 사시도이다.
도 5는 차량 엘리베이터가 개방된 장면을 가지는, 도 4에 도시된 것과 동일한 사시도이다.
도 6은, 차폐부가 폐쇄된, 도 4에 도시된 것과 동일한 사시도이다.
도 7은 도 5에 도시된 제1 리프트 정지 위치의 근접도이다.
도 8은 도 4에 도시된 제2 리프트 정지 위치의 근접도이다.
도 9a 내지 도 9c는 본 발명의 이동 가능 장벽의 근접 사시도이다.
도 10은 본 발명에 따른 차량 엘리베이터, 차폐부 및 샤프트의 구성요소의 예시적인 도면이다.
도 11a 내지 도 11d는 본 발명의 록킹 메커니즘의 근접 사시도이다.
도 12는 본 발명에 따른 자동화된 보관 및 회수 시스템의 예시적인 실시형태의 사시도이다.
도 13은 본 발명에 따른 자동화된 보관 및 회수 시스템의 예시적인 실시형태의 사시도이다.
도 1은 종래 기술의 자동화된 보관 및 회수 시스템의 프레임워크 구조물의 사시도이다.
도 2는 보관 컨테이너를 내부에서 이송하기 위한 중앙 배열 공동을 가지는 종래 기술의 컨테이너 취급 차량의 사시도이다.
도 3은 보관 컨테이너를 아래에서 이송하기 위한 캔틸레버를 가지는 종래 기술의 컨테이너 취급 차량의 사시도이다.
도 4는 본 발명에 따른 자동화된 보관 및 회수 시스템의 예시적인 실시형태의 사시도이다.
도 5는 차량 엘리베이터가 개방된 장면을 가지는, 도 4에 도시된 것과 동일한 사시도이다.
도 6은, 차폐부가 폐쇄된, 도 4에 도시된 것과 동일한 사시도이다.
도 7은 도 5에 도시된 제1 리프트 정지 위치의 근접도이다.
도 8은 도 4에 도시된 제2 리프트 정지 위치의 근접도이다.
도 9a 내지 도 9c는 본 발명의 이동 가능 장벽의 근접 사시도이다.
도 10은 본 발명에 따른 차량 엘리베이터, 차폐부 및 샤프트의 구성요소의 예시적인 도면이다.
도 11a 내지 도 11d는 본 발명의 록킹 메커니즘의 근접 사시도이다.
도 12는 본 발명에 따른 자동화된 보관 및 회수 시스템의 예시적인 실시형태의 사시도이다.
도 13은 본 발명에 따른 자동화된 보관 및 회수 시스템의 예시적인 실시형태의 사시도이다.
이하에서, 첨부 도면을 참조하여 본 발명의 실시형태를 더 구체적으로 설명할 것이다. 그러나, 도면은 본 발명을 도면에 도시된 청구-대상으로 제한하기 위한 것이 아님을 이해하여야 할 것이다.
자동화된 보관 및 회수 시스템(1)의 프레임워크 구조물(100)은 도 1 내지 도 3과 관련하여 전술한 종래 기술의 프레임워크 구조물(100)에 따라 구성되고, 즉 많은 수의 직립 부재(102) 및 직립 부재(102)에 의해서 지지되는 많은 수의 수평 부재(103)로 구성되고, 프레임워크 구조물(100)은 또한 X 방향 및 Y 방향의 제1 상부 레일 시스템(108)을 더 포함한다.
프레임워크 구조물(100)은 부재들(102, 103) 사이에 제공된 보관 컬럼(105) 형태의 보관 격실을 더 포함하고, 보관 컨테이너(106)는 보관 컬럼(105) 내에서 적층체(107)로 적층될 수 있다.
프레임워크 구조물(100)은 임의의 크기일 수 있다. 특히, 프레임워크 구조물(100)이 도 1에 개시된 프레임워크 구조물보다 상당히 더 작을 수 있다는 것을 이해할 수 있을 것이다. 따라서, 프레임워크 구조물(100)은 도 1에 개시된 것보다 더 좁을 수 있고/있거나 더 짧을 수 있고/있거나 덜 깊을 수 있다. 예를 들어, 프레임워크 구조물(100)은 4 x 8 컬럼 초과의 수평 범위 및 적어도 5개의 컨테이너의 보관 깊이를 가질 수 있다.
이제, 도 4 내지 도 11를 참조하여, 본 발명에 따른 자동화된 보관 및 회수 시스템의 일 실시형태를 더 구체적으로 설명할 것이다.
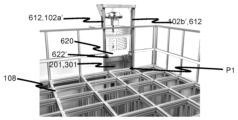
도 4 내지 도 6은 도 1에 도시된 것과 같은 자동화된 보관 및 회수 시스템의 프레임워크 구조물의 수평 주변부(101), 및 수평 주변부(101)를 형성하는 프레임워크 구조물의 복수의 주변 직립 부재(102')를 도시한다. 또한, 컨테이너 취급 차량(201, 301)을 운송하기 위한 차량 엘리베이터(600)가 도시되어 있다. 차량 엘리베이터(600)는 프레임워크 구조물의 외부 주변부(101)로부터 돌출되고 제1 및 제2 리프트 정지 위치들(P1, P2) 사이에 걸쳐진다.
차량 엘리베이터(600)는 컨테이너 취급 차량(201, 301)을 수직 방향(Z)으로 운송하기 위한 리프트 메커니즘(604) 및 플랫폼(602)을 갖는다.
리프트 메커니즘은 윈치(604a), 및 윈치(604a) 상으로 롤링/스풀링될 수 있는 와이어(604b)를 갖는다. 후크(604c)가, 컨테이너 취급 차량(201, 301)을 이송하는 플랫폼(602)의 리프트 프레임(603)에 부착된 와이어(604b)의 일 단부에 배열된다. 플랫폼(602)은 와이어(604b)를 윈치(604a) 상으로 스풀링하는 것에 의해서 리프팅된다.
도 4 및 도 5에서, 컨테이너 취급 차량(201, 301)을 포함하는 플랫폼(602)이 접근 지역(700) 내의 제2 리프트 정지 위치(P2)에 배열되고, 컨테이너 취급 차량(201, 301)에 대한 현장 서비스를 수행할 수 있는 인간 운영자(800)가 컨테이너 취급 차량(201, 301)에 접근한다.
플랫폼(602)이 제2 리프트 정지 위치(P2)에 배열되어 있는 동안, 도어(640)로서 도시된 차폐부가 개방된다. 도어(640)는 차량 엘리베이터(600)의 수직 연장 지지부(612)에 힌지 연결된다. 수직 연장 지지부(612)는 안내 레일/주변 수직 부재로서 도시되어 있고, 이에 대해서는 도 5를 참조한다.
도어(640)는 폐쇄될 때 차폐부를 제공하여, 인간 운영자(800)가 차량 엘리베이터(600)의 제2 리프트 정지 위치(P2)에 진입하지 않도록 보호한다. 도어(640)는 차량 엘리베이터의 동작 중에 폐쇄되는 반면(도 6 참조), 도어(640)가 도 4에 도시된 바와 같이 개방될 때, 도어는, 컨테이너 취급 차량(201, 301)을 포함하는 플랫폼(602)이 제2 리프트 정지 위치(P2)에 배열될 때 인간 운영자(800)가 컨테이너 취급 차량(201, 301)의 3개의 측면에 완전히 그리고 용이하게 접근할 수 있게 한다. 용이한 접근은, 컨테이너 취급 차량(201, 301)이 제2 리프트 정지 위치(P2)에서 플랫폼(602) 상에 배열되는 동안, 인간 운영자(800)가 컨테이너 취급 차량(201, 301)에 대한 서비스 또는 유지 보수를 수행할 수 있게 한다.
도어는 수동적으로 또는 자동적으로 동작될 수 있다.
도 4는, 플랫폼(602)이 제1 리프트 정지 위치에 배열되는 동안 그리고 플랫폼이 제2 리프트 정지 위치로 하강되는 동안, 컨테이너 취급 차량(201, 301)이 플랫폼(602)으로부터 낙하되는 것을 방지하도록 배열된 샤프트(630)를 더 도시한다. 도어(640)는, 폐쇄될 때, 차폐부(630)의 연장부로서 보일 수 있다.
플랫폼(602)은 수평 방향(X, Y)에 수직인 수직 방향(Z)으로 이동하는 것으로 도시되어 있다.
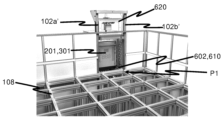
도 4와 동일한 시스템을 도시하는 도 5는 예시적인 목적을 위해서 샤프트를 도시하지 않는다.
이는, 수직 연장 지지부(612)가 복수의 주변 직립 부재(102')의 2개의 주변 직립 부재(102a', 102b')를 포함하는 도 5에 도시되어 있다. 2개의 주변 직립 부재(102a', 201b')는 플랫폼(602)을 위한 그리고 이동 가능 장벽(620)을 위한 안내 레일로서의 역할을 한다. 이동 가능 장벽(620)은, 플랫폼(602)이 제1 리프트 정지 위치(P1)로부터 멀리 배열될 때, 프레임워크 구조물의 레일 시스템 상에서 동작하는 컨테이너 취급 차량이 제1 리프트 정지 위치(P1)로 이동하는 것을 방지하도록 배열된다. 이동 가능 장벽(620)은 휴지 구조물에 기대어(도 9a 참조), 이동 가능 장벽(620)이 제2 리프트 정지 위치(P2)를 향해서 하향 이동하는 것을 방지한다. 이동 가능 장벽의 동작이 도 9a 내지 도 9c와 관련하여 구체적으로 설명된다.
도시된 바와 같이, 2개의 주변 직립 부재(102a', 102b')는 제1 리프트 정지 위치(P1) 위에서 연장된다. 또한 도 4에서 확인되는 바와 같이, 리프트 메커니즘(604)의 고정을 위해서, 부착 브라켓(606)이 2개의 주변 직립 부재(102a', 102b')의 상부 단부에 배열된다. 플랫폼(602)을 이동시킬 때 와이어(604b)가 실질적으로 수직 방향(Z)으로 진행하도록, 리프트 메커니즘(604)이 배열된다.
차폐부/도어(640)는, 플랫폼(602)이 제2 리프트 정지 위치(P2)에 배열되는 것으로 인해서, 인간 운영자 및/또는 로봇이 컨테이너 취급 차량(201, 301)에 접근할 수 있게 하는 개방 위치에서 도시되어 있다.
플랫폼(602)은 평행 레일(610a, 610b)의 세트를 포함하고, 그 위에는 컨테이너 취급 차량(201, 301)의 구동 수단/휠의 세트가 배열된다.
도 6은 도 4와 동일한 시스템을 도시하고, 여기에서 도어(640)는 폐쇄 위치에 있고, 그에 의해서 인간 운영자가 제2 리프트 정지 위치에 접근하는 것을 방지한다. 도면은, 차량 엘리베이터의 플랫폼 상에 배열된 컨테이너 취급 차량이 동작 중에 차폐부 또는 도어에 의해서 보호되도록 하기 위해서 도어(640)가 어떻게 차폐부(630)의 연장부를 제공하는지를 더 도시한다.
또한, 인간 운영자의 안전을 위해서, 차량 엘리베이터의 동작 중에 도어(640)가 폐쇄되도록 그리고 차량 엘리베이터의 플랫폼이, 예를 들어 제1 리프트 정지 위치에 배열되는 것과 같이, 제2 리프트 정지 위치로부터 멀리 배열되도록, 시스템이 동작되어야 한다.
또한, 도 5에 도시된 바와 같이, 프레임워크 구조물의 레일 시스템 상에서 동작하는 컨테이너 취급 차량이 제1 리프트 정지 위치에 진입하는 것을 방지하는 위치에 이동 가능 장벽(620)이 있는 동안에만 도어(640)가 개방될 수 있도록, 시스템이 동작되어야 한다.
도 7은 제1 리프트 정지 위치(P1)에 배열된 플랫폼(602)의 근접도이다. 플랫폼(602)은 수평 구조물(608), 리프트 프레임(603), 거더(girder)(614), 연결 장치(609), 및 수직 구조물(616)을 갖는다.
리프트 프레임(603)은 플랫폼(602)의 대향 측면들로부터 수직 방향으로 연장되는 2개의 기둥(603a, 603b)을 포함한다. 2개의 기둥(603a, 603b)은 빔(603c)에 의해서 그 상부 단부들에서 상호 연결된다. 2개의 기둥(603a, 603b)의 상부 단부들은 플랫폼(602)의 수평 연장 구조물/수평 구조물(608)의 원위에 배열된다. 리프트 프레임(603)의 빔(603c)은 리프트 메커니즘(604)의 와이어 상에 배열된 후크에 부착되는 현수 지점(607)을 더 포함할 수 있다.
플랫폼의 수평 구조물(608)은, 플랫폼(602) 상에 배열될 때, 컨테이너 취급 차량(미도시)을 지지한다. 도시된 수평 구조물(608)은, 컨테이너 취급 차량이 프레임워크의 레일 시스템 상의 위치로부터 플랫폼(602)의 제1 리프트 정지 위치로 그리고 그 반대로 이동할 수 있도록, 프레임워크 구조물의 레일 시스템의 레일 배열체와 수직으로 정렬되는 레일 배열체(610)를 포함한다. 이동 가능 장벽(620)은 리프트 프레임(603)의 빔(603c) 상에 놓인 2개의 수평 배열 막대를 갖는다. 따라서, 플랫폼(602)이 제1 리프트 정지 위치(P1)에 배열될 때, 장벽(620)은 플랫폼(602)의 리프트 프레임(603) 위에 배열되어 컨테이너 취급 차량이 플랫폼(602) 상으로 진입할 수 있게 한다. 도 9a 내지 도 9c와 관련하여, 이동 가능 장벽을 더 설명할 것이다.
플랫폼(602)은 선형 롤러/휠(미도시)에 의해서 2개의 안내 레일(102a', 102b')로서 도시된 수직 연장 지지부(612)에 이동 가능하게 연결된다. 적어도 하나의 선형 롤러가 각각의 안내 레일 상에 이동 가능하게 배열되고 플랫폼(602)의 2개의 수직 구조물(616)에 대해서 고정적으로 배열된다. 각각의 수직 구조물(616)은 수평 구조물(608)의 대향 측면들과 함께 모서리 브라켓 구조물을 형성한다. 수평 구조물(608)의 측면은 컨테이너 취급 차량이 플랫폼(602)의 내외로 이동할 때 컨테이너 취급 차량의 이동 방향으로 연장된다. 2개의 수직 구조물(616)은 수평 구조물(608)의 아래에 배열되고, 각각의 수직 구조물(616)은 수평 구조물(608)의 측면을 지지하고 안내 레일에 이동 가능하게 부착된다.
또한, 2개의 대각선 방향으로 배열된 거더(614)가 수평 구조물(608)과 2개의 수직 구조물(616)의 각각 사이의 연결부를 강화하도록 배열되고, 그에 의해서 컨테이너 취급 차량이 플랫폼(602) 상에 배열될 때 추가적인 지지를 제공한다.
플랫폼(602)의 수평 구조물(608)은 프레임워크 구조물의 레일 시스템의 2개의 그리드 셀과 동일한 레일 배열체(610)를 갖는다. 플랫폼(602)이 제1 리프트 정지 위치(P1)에 배열될 때, 플랫폼(602) 상의 레일 배열체(610)는 프레임워크의 레일 시스템과 수직으로 정렬되어 컨테이너 취급 차량이 플랫폼(602)으로 그리고 그로부터 이동할 수 있게 한다.
도 8은 제2 리프트 정지 위치(P2)에 배열된 플랫폼(602)의 근접도이다. 제2 리프트 정지 위치(P2)는 접근 지역(700) 내에 배열된다. 플랫폼(602)은 그 위에 배열된 컨테이너 취급 차량(201, 301)을 가지고, 도어(640)로서 도시된 차폐부는 인간 운영자(800)가 컨테이너 취급 차량(201, 301)에 접근하도록 개방된다.
도 7에 도시된 바와 같이, 플랫폼(602)의 리프트 프레임(603)은 컨테이너 취급 차량(201, 301)의 대향 측면들 주위에 도달하도록 배열된다. 리프트 프레임(603)은 리프트 프레임(603)의 현수 지점(607)에서 리프트 메커니즘의 와이어(604b)에 연결된다.
도 9a 내지 도 9c는, 플랫폼(602)이 제1 리프트 정지 위치(P1)로부터 멀리 배열될 때 동작 컨테이너 취급 차량이 제1 리프트 정지 위치(P1)에 진입하는 것을 방지하도록 배열된 이동 가능 장벽(620)의 동작에 관한 상세도이다.
도 9a에서, 이동 가능 장벽(620)은, 프레임워크 구조물의 레일 시스템(108) 상에서 동작하는 컨테이너 취급 차량이 제1 리프트 정지 위치(P1) 내로 이동하는 것을 방지하도록, 배열된다. 막대 형태의 2개의 휴지 구조물(622')이 장벽(620)의 기부에 고정되고 수평으로 연장되고, 그에 따라 휴지 구조물(622')은 프레임워크 구조물의 레일 시스템(108) 상에 놓인다. 장벽(620)의 휴지 구조물(622')이 레일 시스템(108) 상에 놓일 때, 레일 시스템(108) 상에 배열된 컨테이너 취급 차량은 제1 리프트 정지 위치(P1)로 이동하는 것이 방지된다.
이동 가능 장벽(620)은, 장벽(620)이 수직 방향으로 안내 레일(612, 102a', 102b')을 따라서 이동될 수 있도록, 안내 레일(612, 102a', 102b')에 대해서 이동 가능하게 배열된 선형 롤러(623) 형태의 연결 장치를 갖는다.
도 9b는, 컨테이너 취급 차량(201, 301)이 위에 배열된 차량 엘리베이터의 플랫폼(보이지 않음)이 제2 리프트 정지 위치로부터 제1 리프트 정지 위치(P1)에 접근하는, 배열체를 도시한다. 플랫폼이 제1 리프트 정지 위치에 접근함에 따라, 이동 가능 장벽(620)은 플랫폼의 리프트 프레임에 의해서 리프팅되고, 이에 대해서는 도 7을 참조한다. 따라서, 장벽(620)의 수평 막대는 도 9a에 도시된 바와 같이 레일 시스템(108) 상에 놓인 장벽(620)의 휴지 구조물(622') 대신 플랫폼의 리프트 프레임의 빔 상에 놓인다.
도 9c에서, 차량 엘리베이터의 플랫폼(602)은 반대 각도로부터 도 7에 또한 도시된 바와 같이 제1 리프트 정지 위치(P1)에 배열된다. 플랫폼(602)의 레일 배열체(610)는 레일 시스템(108)과 수직으로 정렬된다. 또한, 장벽(620)이 리프팅되었고, 그에 따라 플랫폼(602) 상에 배열된 컨테이너 취급 차량(201, 301)은 레일 시스템(108) 상으로 이동할 수 있다.
도 10은 차량 엘리베이터(600), 샤프트(630), 및 차폐부(640)의 상이한 부분들의 도면이다.
도시된 바와 같이, 차량 엘리베이터는 플랫폼(602)을 위한 안내 레일로서의 역할을 하는 프레임워크 구조물의 주변 직립 부재(102a', 102b')로서 도시된 수직 연장 지지부(612)를 갖는다.
부착 브라켓(606)이 수직 연장 지지부(612)에 고정될 수 있고 그에 리프트 메커니즘(604)을 고정하도록 배열된다.
이동 가능 장벽(620)은 장벽(620)을 수직 연장 지지부(612)에 이동 가능하게 부착하기 위한 연결 수단(623)을 갖는 것으로 도시되어 있다. 또한, 리프트 프레임(603)의 빔(603c)이 제1 리프트 정지 위치에 진입할 때 리프트 프레임(603)의 빔(603c)과 결합되는, 장벽(620)의 수평 막대(622)가 도시되어 있다. 플랫폼(602)이 제1 리프트 정지 위치로부터 멀리 배열되는 동안 이동 가능 장벽(620)이 프레임워크 구조물의 레일 시스템 상에 놓일 수 있게 하는 휴지 구조물(622')이 또한 도시되어 있다.
도시된 바와 같이, 플랫폼(602)은 수직 구조물(616)에 고정된 수평 구조물(608)을 가지며, 이들 둘은 모서리 브라켓을 형성한다. 수직 구조물(616)은, 플랫폼(602)을 수직 연장 지지부(612)의 안내 레일(102a', 102b')에 이동 가능하게 부착하기 위한, 그에 고정된 연결 장치(609)를 갖는다. 수평 구조물(608)은 프레임워크 구조물의 레일 시스템의 하나의 그리드 셀의 크기를 갖는 레일 배열체(610)를 갖는다.
또한, 빔(603c)에 의해서 상부 단부에서 상호 연결된 수평 구조물(608)의 대향 측면들에 배열된 2개의 기둥(603a, 603b)을 갖는 플랫폼(602)의 리프트 프레임(603)이 도시되어 있다. 기둥(603a, 603b)은 플랫폼(602) 상에서 이송되는 컨테이너 취급 차량의 높이보다 더 긴 수직 연장부를 가지며, 그에 따라 리프트 프레임(603)은, 플랫폼(602)의 수평 구조물(608) 상에 배열될 때, 컨테이너 취급 차량을 프레임화한다.
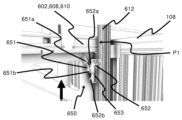
도 11a 내지 도 11d는, 플랫폼(602)이 제1 리프트 정지 위치(P1)에 배열된 때, 플랫폼(602)의 레일 배열체(110)를 레일 시스템(108)과 수직 정렬된 설정 높이에서 유지하도록 배열된 록킹 메커니즘(650)의 동작을 개시한다.
도시된 록킹 메커니즘(650)은 플랫폼(602)에 연결된 브라켓(651), 및 차량 엘리베이터의 수직 연장 지지부(612)에 연결된, 그에 부착된 스프링(653)을 가지는 스프링-편향된 폴(652)을 갖는다. 브라켓(651)은 브라켓의 상부 및 하부 단부에 각각 배열된 상부 및 하부 돌출부(651a, 651b)를 갖는다. 상부 및 하부 돌출부(651a, 651b) 모두는 수직 및 수평으로 변위된다. 또한, 폴(652)은 그 상부 단부에 위치되는 록킹 립(652a) 및 그 하부 단부에 위치되는 해제 립(652b)을 갖는다.
도면의 화살표는 플랫폼(602) 그리고 결과적으로 브라켓(651)의 이동 방향을 나타낸다.
도 11a에서, 폴(652)은 편향된/현수된 록킹 위치에 배열되고, 브라켓(651)의 상부 돌출부(651a)는 편향된 폴(652)의 록킹 립(652a) 상에 놓인다. 록킹 립(652a)은 브라켓(651)의 상부 및 하부 돌출부들(651a, 651b) 사이에 배열된다. 이러한 록킹 위치에서, 플랫폼(602)의 수평 구조물(608)의 레일 배열체(610)는 프레임워크 구조물의 레일 시스템(108)과 수직으로 정렬된다.
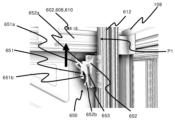
도 11b는, 브라켓(651)의 하부 단부에 위치되는 하부 돌출부(651b)가 폴(652)의 록킹 립(652a)을 이동시켜 폴(652)이 해제 위치로 선회되도록, 그에 따라 그 후에 플랫폼(602)이 제2 리프트 정지 위치를 향해서 하강될 수 있도록, 플랫폼(602) 그리고 결과적으로 브라켓(651)을 약간 리프팅시키는 것에 의해서 어떻게 록킹 메커니즘(650)을 언록킹시키는지를 도시한다.
도 11c는, 플랫폼(602)의 하강 중에 폴(652)의 해제 립(652b)이 브라켓(651)의 하부 돌출부(651b)에 의해서 밀릴 때, 플랫폼(602)이 더 하강된 후에 폴(652)이 어떻게 그 편향 위치로 역으로 선회되는지를 도시한다. 그러나, 폴(652)의 편향 위치는 폴(652)을 브라켓(651)에 록킹하지 않는데, 이는 브라켓(651)의 상부 돌출부(651a)가 폴(652)의 록킹 립(652a) 아래로 하강되었기 때문이다. 따라서, 플랫폼(602)은 제2 리프트 정지 위치로 자유롭게 이동할 수 있다.
도 11d는 플랫폼(602)이 제1 리프트 정지 위치(P1)에 접근할 때 제2 리프트 정지 위치로부터 이동하는 플랫폼을 도시한다. 플랫폼(602)이 제1 리프트 정지 위치(P1) 약간 위의 위치로 이동하는 동안 브라켓(651)이 폴(652)을 통과할 때, 브라켓(651)의 상부 돌출부(651a)는 폴(652)의 록킹 립(652a)을 약간 민다. 브라켓(651)의 상부 돌출부(651a)가 폴(652)의 록킹 립(652a)을 통과한 후에, 폴(652)은 록킹된 편향 위치로 역으로 선회된다. 그 후에, 브라켓(651)을 갖는 플랫폼(602)이 이어서 휴지 위치로 약간 하강되고, 그에 따라 브라켓(651)의 상부 돌출부(651a)는 도 11a에 도시된 바와 같이 록킹 위치에 있을 때 완전히 편향된 폴(652)의 록킹 립(652a) 상에 놓인다.
도 12 및 도 13 모두는 자동화된 보관 및 회수 시스템(1)을 다른 각도들에서 도시한다. 시스템(1)은 프레임워크 구조물(100)을 가지고, 여기에서 컨테이너 취급 차량(301)은 그 레일 시스템(108) 상에서 동작한다.
프레임워크 구조물(100)의 외부로부터 보관 컨테이너에 접근하기 위한 2개의 접근 스테이션(150)이 프레임워크 구조물(100)의 주변부 상에 배열된다. 하나의 접근 스테이션(150)은 제1 포트 컬럼(119)과 연결되게 배열되고, 다른 접근 스테이션(150)은 도 1과 관련하여 개시된 바와 같이 동작하는 제2 포트 컬럼(120)과 연결되게 배열된다.
또한, 시스템(1)은 프레임워크 구조물(100)의 주변부에 배열된, 도 4 내지 도 6에 도시된 바와 같은, 차량 엘리베이터(600)를 갖는다. 인간 운영자가 바닥 레벨(970)로부터 레일 시스템(108)에 접근하기 위한 계단(900)이 차량 엘리베이터(600)에 인접한다.
도시된 바와 같이, 계단(900)은 시스템(1)의 바닥 레벨(970)로부터 시스템(1)의 프레임워크 구조물(100)의 레일 시스템(108)의 레벨까지 걸쳐진다.
시스템(1)의 동작 중에 인간 운영자를 레일 시스템(108)의 접근으로부터 보호하기 위해서, 계단(900)은 도어(940) 뒤쪽에 배열되고, 이러한 도어는, 시스템(1)이 중단된 때에만 도어(940)가 개방될 수 있도록, 수동적으로 또는 자동적으로 제어될 수 있다.
레일 시스템(108) 및/또는 레일 시스템(108)의 레벨에 위치되는 계단(900)은 동작 컨테이너 취급 차량(301)이 계단(900)에 진입하는 것을 방지하는 장벽을 포함할 수 있다. 그러나, 레일 시스템(108)의 레일의 위치에 의해서 컨테이너 취급 차량(301)이 계단(900)에 진입하는 것이 방지되도록 도 12 및 도 13의 계단이 배열될 때, 그러한 장벽은 필요하지 않을 수 있다.
선행 설명에서, 본 발명에 따른 전달 차량 및 자동화된 보관 및 회수 시스템의 여러 양태가 예시적인 실시형태를 참조하여 설명되었다. 설명을 위해서, 특정 숫자, 시스템 및 구성이 시스템 및 그 작업의 완전한 이해를 제공하기 위해서 기술되었다. 그러나, 이러한 설명은 제한적인 의미로 해석되는 것으로 의도되지 않는다. 개시된 청구 대상과 관련된 당업자에게 명확한, 예시적인 실시형태의 여러 수정 및 변경뿐만 아니라, 시스템의 다른 실시형태가 본 발명의 범위에 포함되는 것으로 간주된다.
1
자동화된 보관 및 회수 시스템
100 프레임워크 구조물
101 프레임워크 구조물의 수평 주변부
102 프레임워크 구조물의 내부 직립 부재
102' 프레임워크 구조물의 주변 직립 부재
102a', 102b' 안내 레일로서의 역할을 하는 주변 직립 부재
103 프레임워크 구조물의 수평 부재
104 보관 그리드
105 보관 컬럼
106 보관 컨테이너
106' 보관 컨테이너의 특정 위치
107 적층체
108 레일 시스템
110 제1 방향(X)의 평행 레일
110a 제1 방향(X)의 제1 레일
110b 제1 방향(X)의 제2 레일
111 제2 방향(Y)의 평행 레일
111a 제2 방향(Y)의 제1 레일
111b 제2 방향(Y)의 제2 레일
112 접근 개구부
119 제1 포트 컬럼
120 제2 포트 컬럼
150 접근 스테이션
201 종래 기술의 보관 컨테이너 차량
201a 보관 컨테이너 차량(201)의 차량 본체
201b 구동 수단/휠 배열체, 제1 방향(X)
201c 구동 수단/휠 배열체, 제2 방향(Y)
301 종래 기술의 캔틸레버 보관 컨테이너 차량
301a 보관 컨테이너 차량(301)의 차량 본체
301b 제1 방향(X)의 구동 수단
301c 제2 방향(Y)의 구동 수단
304 파지 장치
500 제어 시스템
600 차량 엘리베이터
602 플랫폼
603 리프트 프레임
603a, 603b 리프트 프레임의 기둥
603c 리프트 프레임의 빔
604 리프트 메커니즘
604a 윈치
604b 와이어
604c 후크
606 부착 브라켓
607 리프트 프레임의 현수 지점
608 수평 구조물/수평 연장 구조물
609 플랫폼의 연결 장치
610 플랫폼 레일 배열체
610a 플랫폼 레일 배열체의 레일
610b 플랫폼 레일 배열체의 레일
612 수직 연장 지지부
614 거더
616 수직 연장 구조물/수직 구조물
620 이동 가능 장벽/장벽
622 이동 가능 장벽의 수평 막대
622' 이동 가능 장벽의 휴지 구조물
623 이동 가능 장벽의 선형 베어링
630 샤프트
640 차폐부/도어
650 록킹 메커니즘
651 브라켓
651a 브라켓의 상부 돌출부
651b 브라켓의 하부 돌출부
652 폴
652a 폴의 록킹 립
652b 폴의 해제 립
653 스프링
700 접근 지역
800 인간 운영자/작업자
900 계단/사다리
910 개구부
940 차폐부/도어
970 바닥 레벨
P1 제1 리프트 정지 위치
P2 제2 리프트 정지 위치
X 제1 방향
Y 제2 방향
Z 제3 방향, 수직 방향
100 프레임워크 구조물
101 프레임워크 구조물의 수평 주변부
102 프레임워크 구조물의 내부 직립 부재
102' 프레임워크 구조물의 주변 직립 부재
102a', 102b' 안내 레일로서의 역할을 하는 주변 직립 부재
103 프레임워크 구조물의 수평 부재
104 보관 그리드
105 보관 컬럼
106 보관 컨테이너
106' 보관 컨테이너의 특정 위치
107 적층체
108 레일 시스템
110 제1 방향(X)의 평행 레일
110a 제1 방향(X)의 제1 레일
110b 제1 방향(X)의 제2 레일
111 제2 방향(Y)의 평행 레일
111a 제2 방향(Y)의 제1 레일
111b 제2 방향(Y)의 제2 레일
112 접근 개구부
119 제1 포트 컬럼
120 제2 포트 컬럼
150 접근 스테이션
201 종래 기술의 보관 컨테이너 차량
201a 보관 컨테이너 차량(201)의 차량 본체
201b 구동 수단/휠 배열체, 제1 방향(X)
201c 구동 수단/휠 배열체, 제2 방향(Y)
301 종래 기술의 캔틸레버 보관 컨테이너 차량
301a 보관 컨테이너 차량(301)의 차량 본체
301b 제1 방향(X)의 구동 수단
301c 제2 방향(Y)의 구동 수단
304 파지 장치
500 제어 시스템
600 차량 엘리베이터
602 플랫폼
603 리프트 프레임
603a, 603b 리프트 프레임의 기둥
603c 리프트 프레임의 빔
604 리프트 메커니즘
604a 윈치
604b 와이어
604c 후크
606 부착 브라켓
607 리프트 프레임의 현수 지점
608 수평 구조물/수평 연장 구조물
609 플랫폼의 연결 장치
610 플랫폼 레일 배열체
610a 플랫폼 레일 배열체의 레일
610b 플랫폼 레일 배열체의 레일
612 수직 연장 지지부
614 거더
616 수직 연장 구조물/수직 구조물
620 이동 가능 장벽/장벽
622 이동 가능 장벽의 수평 막대
622' 이동 가능 장벽의 휴지 구조물
623 이동 가능 장벽의 선형 베어링
630 샤프트
640 차폐부/도어
650 록킹 메커니즘
651 브라켓
651a 브라켓의 상부 돌출부
651b 브라켓의 하부 돌출부
652 폴
652a 폴의 록킹 립
652b 폴의 해제 립
653 스프링
700 접근 지역
800 인간 운영자/작업자
900 계단/사다리
910 개구부
940 차폐부/도어
970 바닥 레벨
P1 제1 리프트 정지 위치
P2 제2 리프트 정지 위치
X 제1 방향
Y 제2 방향
Z 제3 방향, 수직 방향
Claims (15)
- 자동화된 보관 및 회수 시스템(1)이며,
보관 컨테이너들(106)을 수직 적층체(107)로 서로 상하로 보관하기 위한 다수의 보관 컬럼(105)을 포함하는 보관 그리드를 형성하도록 배열된 복수의 내부 및 주변 직립 부재(102, 102')를 가지는 프레임워크 구조물(100)로서, 상기 직립 부재(102, 102')는, 적어도 하나의 컨테이너 취급 차량(201, 301)을 위에서 안내하도록 배열된 레일 시스템(108)에 의해서 그 상부 단부들에서 상호 연결되고, 상기 컨테이너 취급 차량(201, 301)은 상기 보관 컨테이너(106)를 상기 보관 컬럼(105)으로부터 상승시키도록, 그리고 상기 보관 컨테이너(106)를 상기 보관 컬럼 내로 하강시키도록 그리고 상기 보관 컨테이너(106)를 상기 보관 컬럼(105) 위로 수평으로 운송하도록 구성되고, 상기 프레임워크 구조물(100)의 주변 직립 부재(102')는 상기 프레임워크 구조물(100)의 수평 주변부(101)를 형성하는, 프레임워크 구조물(100), 및
차량 엘리베이터(600)를 포함하고, 상기 차량 엘리베이터는:
수직 연장 지지부(612),
플랫폼(602)으로서, 상기 컨테이너 취급 차량(201, 301)을 이송하도록 배열된 수평 연장 구조물(608) 및 상기 플랫폼(602)을 상기 수직 연장 지지부(612)에 이동 가능하게 부착하는 연결 장치(609)를 포함하는, 플랫폼(602), 및
상기 플랫폼(602)을, 상기 플랫폼(602)과 상기 레일 시스템(108) 사이의 접근을 설정하는 제1 리프트 정지 위치(P1)와, 상기 컨테이너 취급 차량(201, 301)이 상기 플랫폼(602) 상에 배열되어 있는 동안 인간 운영자/서비스 작업자(800) 및/또는 로봇이 상기 컨테이너 취급 차량(201, 301)에 대한 현장 유지 보수를 수행할 수 있도록 접근 지역(700) 내에 배열되는 제2 리프트 정지 위치(P2) 사이에서 이동시키도록 배열되는 리프트 메커니즘(604)으로서, 제1 및 제2 리프트 정지 위치(P1, P2)는 수직으로 오프셋되어 배열되는, 리프트 메커니즘(604)을 포함하는, 시스템(1). - 제1항에 있어서,
상기 리프트 메커니즘(604)은 상기 플랫폼(602)을 리프팅하기 위한 윈치 및 케이블을 포함하는, 시스템(1). - 제1항 또는 제2항에 있어서,
상기 플랫폼(602)의 수평 연장 구조물(608)은 플랫폼 레일 배열체(610)를 포함하고, 상기 플랫폼 레일 배열체는:
상기 플랫폼 레일 배열체(610)가 상기 레일 시스템(108)과 수직 레벨에 있고 상기 플랫폼(602)이 상기 제1 리프트 정지 위치(P1)에 있을 때 상기 컨테이너 취급 차량(201, 301)이 상기 플랫폼 레일 배열체(610)와 상기 레일 시스템(108) 사이에서 이동할 수 있게 허용하도록 구성된 적어도 하나의 평행 레일(610a, 610b)의 세트를 포함하는, 시스템(1). - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 시스템(1)은, 상기 플랫폼(602)이 상기 제1 리프트 정지 위치(P1)로부터 멀리 배치될 때 상기 컨테이너 취급 차량(201, 301)이 상기 제1 리프트 정지 위치(P1)로 진입하는 것을 방지하도록, 그리고 상기 플랫폼(602)이 상기 제1 리프트 정지 위치(P1)에 배열될 때 상기 컨테이너 취급 차량(201, 301)이 상기 플랫폼(602)에 진입할 수 있게 허용하도록 구성된 이동 가능 장벽(620)을 포함하는, 시스템(1). - 제1항 내지 제4항 중 어느 한 항에 있어서,
차량 엘리베이터(600)의 플랫폼(602)은 상기 컨테이너 취급 차량이 상기 플랫폼(602) 상에서 이송될 때 상기 컨테이너 취급 차량(201, 301)의 대향 측면들 주위에 도달하도록 배열된 리프트 프레임(603)을 포함하고, 상기 리프트 프레임은 상기 리프트 메커니즘(604)에 연결되어 상기 플랫폼(602)을 리프팅하는, 시스템(1). - 제1항 내지 제5항 중 어느 한 항에 있어서,
상기 차량 엘리베이터(600)는 상기 프레임워크 구조물(100)의 보관 그리드의 외부 주변부(101)로부터 돌출되는, 시스템(1). - 제6항에 있어서,
상기 수직 연장 지지부(612)는, 상기 차량 엘리베이터(600)의 플랫폼(602)을 제1 및 제2 리프트 정지 위치들(P1, P2) 사이에서 수직 방향(Z)으로 안내하기 위한 안내 레일(102a, 102b)로서의 역할을 하는 복수의 주변 직립 부재(102')의 적어도 2개를 포함하는, 시스템(1). - 제5항을 인용하는 제6항에 있어서,
상기 플랫폼(602)이 상기 제1 리프트 정지 위치(P1)에 배열될 때 상기 이동 가능 장벽(620)이 상기 컨테이너 취급 차량(201, 301)의 플랫폼(602) 진입을 허용하도록, 상기 리프트 프레임(603)이 상기 이동 가능 장벽(620)과 결합되어 이를 리프팅시키도록 구성되는, 시스템(1). - 제1항 내지 제8항 중 어느 한 항에 있어서,
상기 플랫폼(602)은, 제1 및 제2 리프트 정지 위치들(P1, P2) 사이에서 이동될 때, 샤프트(630) 내에 배열되고, 상기 샤프트(630)는 상기 컨테이너 취급 차량(201, 301)이 상기 플랫폼(602)으로부터 낙하되는 것을 방지하도록 구성되는, 시스템(1). - 제1항 내지 제9항 중 어느 한 항에 있어서,
차폐부(640)가 폐쇄될 때 상기 제2 리프트 정지 위치(P2)로의 접근을 차단하도록 차폐부(640)가 배열되고, 상기 차폐부(640)는 상기 플랫폼(602)이 상기 제2 리프트 위치(P2)에 도달한 후에만 개방될 수 있는, 시스템(1). - 제1항 내지 제10항 중 어느 한 항에 있어서,
록킹 메커니즘(650)을 포함하고, 상기 록킹 메커니즘은 상기 프레임워크 구조물 상에 제공되고, 상기 제1 리프트 정지 위치(P1)에 배열될 때 상기 플랫폼(602)을 상기 레일 시스템(108)과 수직 정렬되는 설정 높이에서 록킹하도록 배열되는, 시스템(1). - 제11항에 있어서,
상기 록킹 메커니즘(650)은 브라켓(651)을 포함하고, 상기 브라켓은 상기 플랫폼(602) 상에 배치되고, 상기 프레임워크 구조물(100)의 수평 주변부(101) 상에 배열된 편향된 폴(652)을 록킹 및 언록킹시키도록 배열되는, 시스템(1). - 자동화된 저장 및 회수 시스템(1)의 동작 방법이며:
보관 컨테이너들(106)을 수직 적층체(107)로 서로 상하로 보관하기 위한 다수의 보관 컬럼(105)을 포함하는 보관 그리드를 형성하도록 배열된 복수의 내부 및 주변 직립 부재(102, 102')를 가지는 프레임워크 구조물(100)로서, 상기 직립 부재(102, 102')는, 적어도 하나의 컨테이너 취급 차량(201, 301)을 위에서 안내하도록 배열된 레일 시스템(108)에 의해서 그 상부 단부들에서 상호 연결되고, 상기 컨테이너 취급 차량(201, 301)은 상기 보관 컨테이너(106)를 상기 보관 컬럼(105)으로부터 상승시키도록, 그리고 상기 보관 컨테이너(106)를 상기 보관 컬럼(105) 내로 하강시키도록 그리고 상기 보관 컨테이너(106)를 상기 보관 컬럼 위로 수평으로 운송하도록 구성되고, 상기 프레임워크 구조물(100)의 주변 직립 부재(102')는 상기 프레임워크 구조물(100)의 수평 주변부(101)를 형성하는, 프레임워크 구조물(100), 및
차량 엘리베이터(600)를 포함하고, 상기 차량 엘리베이터는:
수직 연장 지지부(612),
플랫폼(602)으로서, 상기 컨테이너 취급 차량(201, 301)을 이송하도록 배열된 수평 연장 구조물(608) 및 상기 플랫폼(602)을 상기 수직 연장 지지부(612)에 이동 가능하게 부착하는 연결 장치(609)를 포함하는, 플랫폼(602), 및
상기 플랫폼(602)을, 상기 플랫폼(602)과 상기 레일 시스템(108) 사이의 접근을 설정하는 제1 리프트 정지 위치(P1)와, 상기 컨테이너 취급 차량(201, 301)이 상기 플랫폼(602) 상에 배열되어 있는 동안 인간 운영자/서비스 작업자(800) 및/또는 로봇이 상기 컨테이너 취급 차량(201, 301)에 대한 현장 유지 보수를 수행할 수 있도록 접근 지역(700) 내에 배열되는 제2 리프트 정지 위치(P2) 사이에서 이동시키도록 배열되는 리프트 메커니즘(604)으로서, 제1 및 제2 리프트 정지 위치(P1, P2)는 수직으로 오프셋되어 배열되는, 리프트 메커니즘(604)을 포함하고, 그리고
상기 방법은:
i) 상기 컨테이너 취급 차량(201, 301)을 상기 레일 시스템(108)으로부터, 상기 제1 리프트 위치(P1)에 배치된 상기 플랫폼(602) 상으로 이동시키는 단계,
ii) 상기 플랫폼(602)을 상기 제2 리프트 정지 위치(P2)로 이동시켜, 상기 컨테이너 취급 차량(201, 301)에 대한 현장 유지 보수를 수행하기 위해서 인간 운영자(800) 및 로봇이 상기 컨테이너 취급 차량(201, 301)에 접근할 수 있게 하는 단계를 포함하는, 방법. - 제13항에 있어서,
상기 시스템(1)은 상기 프레임워크 구조물 상에 제공된 록킹 메커니즘(650)을 더 포함하고, 상기 방법은, 상기 제1 리프트 정지 위치(P1)에 배열될 때, 상기 플랫폼(602)을 상기 레일 시스템(108)과의 수직 정렬로 록킹하는 초기 단계를 포함하는, 방법. - 제13항 또는 제14항에 있어서,
상기 자동화된 보관 및 회수 시스템(1)이 제1항 내지 제12항 중 어느 한 항에 따르는, 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NO20200722A NO346056B1 (en) | 2020-06-19 | 2020-06-19 | Container handling vehicle elevator |
| NO20200722 | 2020-06-19 | ||
| PCT/EP2021/066579 WO2021255235A1 (en) | 2020-06-19 | 2021-06-18 | Container handling vehicle elevator |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20230026420A true KR20230026420A (ko) | 2023-02-24 |
Family
ID=76624037
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020237001715A KR20230026420A (ko) | 2020-06-19 | 2021-06-18 | 컨테이너 취급 차량 엘리베이터 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20230211948A1 (ko) |
| EP (1) | EP4168328A1 (ko) |
| JP (1) | JP2023530976A (ko) |
| KR (1) | KR20230026420A (ko) |
| CN (1) | CN115867501A (ko) |
| CA (1) | CA3181458A1 (ko) |
| NO (1) | NO346056B1 (ko) |
| WO (1) | WO2021255235A1 (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020126725A1 (en) * | 2018-12-20 | 2020-06-25 | Autostore Technology AS | A container accessing station for an automated storage and retrieval system |
| NO20181658A1 (en) * | 2018-12-20 | 2020-06-22 | Autostore Tech As | Automated storage and retrieval system, a storage facility and a method thereof |
| CN112794191A (zh) * | 2021-01-30 | 2021-05-14 | 深圳市嘉伯科技有限公司 | 一种应用于磁悬浮电梯的滑轨及磁悬浮电梯 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1931792A1 (de) * | 1968-12-20 | 1970-09-10 | Leipzig Inst Foerdertech | Verriegelung fuer Umsetzer von Stapelgeraeten |
| US3880299A (en) * | 1972-07-17 | 1975-04-29 | Rapistan Inc | Warehousing system |
| US4007843A (en) * | 1972-07-17 | 1977-02-15 | Rapistan, Incorporated | Multi-aisle warehouse system with mobile lift having control means for an article transfer vehicle |
| NO317366B1 (no) * | 1999-07-01 | 2004-10-18 | Autostore As | Lagringsanlegg med fjernstyrte vogner med to hjulsett og heisinnretning for drift på skinner anlagt i kryss over kolonner av lagringsenheter som er adskilt med vertikale profilstolper |
| DE102009051800A1 (de) * | 2009-11-03 | 2011-05-05 | Westfalia Intralogistic Gmbh | Lageranordnung |
| NO334806B1 (no) | 2012-11-13 | 2014-06-02 | Jakob Hatteland Logistics As | Lagringssystem |
| NO335839B1 (no) | 2012-12-10 | 2015-03-02 | Jakob Hatteland Logistics As | Robot for transport av lagringsbeholdere |
| TWI722277B (zh) * | 2013-03-13 | 2021-03-21 | 美商辛波提克有限責任公司 | 用於自主式車的充電系統 |
| NO337544B1 (no) | 2014-06-19 | 2016-05-02 | Jakob Hatteland Logistics As | Fjernstyrt kjøretøysammenstilling for å plukke opp lagringsbeholdere fra et lagringssystem |
| NO20170216A1 (en) | 2017-02-13 | 2018-08-14 | Autostore Tech As | Rail arrangement for wheeled vehicles in a storage system |
| NO344889B1 (en) * | 2018-06-06 | 2020-06-15 | Autostore Tech As | A service vehicle, an automated storage and retrieval system using such a service vehicle and a method thereof |
| BR112020024745A2 (pt) * | 2018-06-08 | 2021-03-23 | Attabotics Inc. | sistemas de armazenamento e recuperação melhorados |
| WO2019238639A1 (en) * | 2018-06-12 | 2019-12-19 | Autostore Technology AS | System for storing and transporting storage containers |
| NO344750B1 (en) | 2018-06-12 | 2020-04-06 | Autostore Tech As | Unloading arrangement and unloading station, as well as method of unloading an item from a storage container |
| NO20181658A1 (en) * | 2018-12-20 | 2020-06-22 | Autostore Tech As | Automated storage and retrieval system, a storage facility and a method thereof |
| WO2020126725A1 (en) * | 2018-12-20 | 2020-06-25 | Autostore Technology AS | A container accessing station for an automated storage and retrieval system |
-
2020
- 2020-06-19 NO NO20200722A patent/NO346056B1/en unknown
-
2021
- 2021-06-18 CN CN202180043423.XA patent/CN115867501A/zh active Pending
- 2021-06-18 JP JP2022577299A patent/JP2023530976A/ja active Pending
- 2021-06-18 WO PCT/EP2021/066579 patent/WO2021255235A1/en active Search and Examination
- 2021-06-18 US US18/001,128 patent/US20230211948A1/en active Pending
- 2021-06-18 CA CA3181458A patent/CA3181458A1/en active Pending
- 2021-06-18 KR KR1020237001715A patent/KR20230026420A/ko unknown
- 2021-06-18 EP EP21734801.0A patent/EP4168328A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| NO346056B1 (en) | 2022-01-24 |
| CA3181458A1 (en) | 2021-12-23 |
| EP4168328A1 (en) | 2023-04-26 |
| NO20200722A1 (en) | 2021-12-20 |
| JP2023530976A (ja) | 2023-07-20 |
| WO2021255235A1 (en) | 2021-12-23 |
| US20230211948A1 (en) | 2023-07-06 |
| CN115867501A (zh) | 2023-03-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20230026420A (ko) | 컨테이너 취급 차량 엘리베이터 | |
| US20220097967A1 (en) | Service vehicle | |
| NO20200762A1 (en) | An automated storage and retrieval system with a vehicle pen | |
| CN113195380A (zh) | 用于自动存储和取出系统的容器存取站 | |
| CN113661136A (zh) | 存储系统 | |
| CN115009752A (zh) | 具有升降装置的容器存取站 | |
| US20220168601A1 (en) | Automated grid storage and retrieval system with passive fire prevention arrangement | |
| CA3160041A1 (en) | Service vehicle with drone bases | |
| EP4034478B1 (en) | An automated storage and retrieval system with a vehicle pen and a method of moving a vehicle between a first area and a second area of an automated storage an retrieval system | |
| CA3237510A1 (en) | Vehicle gate arrangement with first and second shutters, system comprising the arrangement and method of operation | |
| JP4929535B2 (ja) | 高層収納棚 | |
| US20230373537A1 (en) | A service vehicle with a vehicle pen | |
| NO347583B1 (en) | Bracing arrangement |