KR20220165574A - 차량용 진동 생성 장치 및 방법 - Google Patents
차량용 진동 생성 장치 및 방법 Download PDFInfo
- Publication number
- KR20220165574A KR20220165574A KR1020210074376A KR20210074376A KR20220165574A KR 20220165574 A KR20220165574 A KR 20220165574A KR 1020210074376 A KR1020210074376 A KR 1020210074376A KR 20210074376 A KR20210074376 A KR 20210074376A KR 20220165574 A KR20220165574 A KR 20220165574A
- Authority
- KR
- South Korea
- Prior art keywords
- information
- vibration
- driver
- vibration signal
- vehicle
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 39
- 238000004458 analytical method Methods 0.000 claims abstract description 92
- 238000013473 artificial intelligence Methods 0.000 claims description 21
- 238000010191 image analysis Methods 0.000 claims description 21
- 230000004044 response Effects 0.000 claims description 19
- 230000036760 body temperature Effects 0.000 claims description 7
- 210000001747 pupil Anatomy 0.000 claims description 7
- 210000004556 brain Anatomy 0.000 claims description 5
- 230000008451 emotion Effects 0.000 abstract description 18
- 238000010586 diagram Methods 0.000 description 5
- 230000002996 emotional effect Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000017531 blood circulation Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000009527 percussion Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M7/00—Vibration-testing of structures; Shock-testing of structures
- G01M7/02—Vibration-testing by means of a shake table
- G01M7/025—Measuring arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W50/16—Tactile feedback to the driver, e.g. vibration or force feedback to the driver on the steering wheel or the accelerator pedal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/90—Details or parts not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M7/00—Vibration-testing of structures; Shock-testing of structures
- G01M7/02—Vibration-testing by means of a shake table
- G01M7/022—Vibration control arrangements, e.g. for generating random vibrations
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/174—Facial expression recognition
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/18—Eye characteristics, e.g. of the iris
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/90—Details or parts not otherwise provided for
- B60N2002/981—Warning systems, e.g. the seat or seat parts vibrates to warn the passenger when facing a danger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0872—Driver physiology
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0881—Seat occupation; Driver or passenger presence
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/089—Driver voice
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/21—Voice
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/221—Physiology, e.g. weight, heartbeat, health or special needs
Abstract
본 발명은 상태 정보를 기반으로 분석 정보를 생성하는 상태 분석부, 생성된 분석 정보를 기반으로 차량의 진동을 위한 진동 신호 모델링 정보를 생성하는 진동 신호 모델링 정보 생성부 및 생성된 진동 신호 모델링 정보 및 차량의 주행 정보를 기반으로 진동 신호를 생성하는 진동 신호 생성부를 포함하는 차량용 진동 생성 장치에 관한 것이다.
Description
실시예들은 차량용 진동 생성 장치 및 방법에 관한 것이다.
일반적으로 현존하는 차량용 진동 생성 기술은, 차량용 진동을 생성하여, 차량의 시트(seat) 또는 스티어링 휠(steering wheel)을 통해 차량의 운전자에게 전달하나, 일관적인 생성 방법을 통해 진동을 생성하여 전달하므로 운전자의 신체 상태 또는 감정을 고려하지 못하는 문제점이 있다.
또한, 일부 차량의 스티어링 휠에서 진동 경고를 발생시키는 시스템이 존재하나, 이 역시 운전자의 신체 상태 또는 감정을 고려하지 못하는 문제점이 있다.
실시예들은, 운전자의 신체 상태 또는 감정을 고려하여 차량용 진동을 생성하는 장치 또는 방법을 제공하는 것을 과제로 한다.
또한, 실시예들은, 운전자의 신체 상태 또는 감정와 더불어, 차량의 주행 경고 상태를 더 고려하여 차량용 진동을 생성하는 장치 또는 방법을 제공하는 것을 과제로 한다.
본 발명의 기술적 과제들은 이상에서 언급한 기술적 과제로 제한되지 않으며, 언급되지 않은 또 다른 기술적 과제들은 아래의 기재들로부터 당업자에게 명확하게 이해될 수 있을 것이다.
실시예들에 따른 차량용 진동 생성 장치는, 상기 상태 정보를 기반으로 분석 정보를 생성하는 상태 분석부; 상기 생성된 분석 정보를 기반으로 상기 차량의 진동을 위한 진동 신호 모델링 정보를 생성하는 진동 신호 모델링 정보 생성부; 및 상기 생성된 진동 신호 모델링 정보 및 상기 차량의 주행 정보를 기반으로 진동 신호를 생성하는 진동 신호 생성부; 를 포함할 수 있다.
또한, 실시예들에 따른 상기 운전자의 상태 정보는 운전자 영상 정보, 운전자 음성 정보 또는 운전자 생체 신호 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 상태 분석부는, 상기 운전자 영상 정보를 기반으로 영상 분석 정보를 생성하는 영상 분석부; 상기 운전자 음성 정보를 기반으로 음성 분석 정보를 생성하는 음성 분석부; 및 상기 운전자 생체 신호 정보를 기반으로 생체 신호 분석 정보를 생성하는 생체 신호 분석부; 를 포함하고, 상기 분석 정보는 상기 영상 분석 정보, 상기 음성 분석 정보 또는 상기 생체 신호 분석 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 운전자 영상 정보는 상기 운전자의 얼굴 영상 또는 상기 운전자의 동공 영상 중 적어도 하나를 포함하고, 상기 운전자 생체 신호 정보는 상기 운전자의 맥박 정보, 상기 운전자의 체온 정보 또는 상기 운전자의 뇌파 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 진동 신호 모델링 정보는 하나 또는 그 이상의 진동 성분들을 포함하고, 상기 진동 성분들은 비트(beat) 진동 성분 또는 화음(harmony) 진동 성분 중 적어도 하나를 포함하고, 상기 진동 신호 모델링 정보는 각 진동 성분의 주기 정보, 상기 각 진동 성분의 재생 시점 정보, 상기 각 진동 성분의 정지 시점 정보 또는 상기 각 진동 성분의 재생 시간 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 진동 신호 모델링 정보는 인공지능 학습모델에 상기 분석 정보가 입력되어 생성될 수 있다.
또한, 실시예들에 따른 상기 인공지능 학습모델은, 차량의 운전자의 상태 정보에 기반한 분석 정보가 입력되는 것에 대응하여, 상기 입력된 분석 정보에 대응하는 진동 신호 모델링 정보를 출력하도록 학습될 수 있다.
또한, 실시예들에 따른 상기 주행 정보는 상기 차량의 속도 정보를 포함하고, 상기 진동 신호는 상기 진동 신호 모델링 정보 또는 경고성 진동 신호 모델링 정보 중 적어도 하나를 기반으로 생성될 수 있다.
또한, 실시예들에 따른 상기 진동 신호는, 상기 주행 정보가 상기 차량의 주행 방해 상태를 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보 및 상기 경고성 진동 신호 모델링 정보를 기반으로 생성되고, 상기 주행 정보가 상기 차량의 상기 주행 방해 상태가 아님을 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보를 기반으로 생성될 수 있다.
또한, 실시예들에 따른 상기 생성된 진동 신호는 상기 차량의 시트(seat) 또는 상기 차량의 스티어링 휠(steering wheel) 중 적어도 하나에 전달될 수 있다.
또한, 실시예들에 따른 차량용 진동 생성 방법은, 차량의 운전자의 상태 정보를 수신하고, 상기 상태 정보를 기반으로 분석 정보를 생성하는 단계; 상기 생성된 분석 정보를 기반으로 상기 차량의 진동을 위한 진동 신호 모델링 정보를 생성하는 단계; 및 상기 생성된 진동 신호 모델링 정보 및 상기 차량의 주행 정보를 기반으로 진동 신호를 생성하는 단계; 를 포함할 수 있다.
또한, 실시예들에 따른 상기 운전자의 상태 정보는 운전자 영상 정보, 운전자 음성 정보 또는 운전자 생체 신호 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 분석 정보를 생성하는 단계는, 상기 운전자 영상 정보를 기반으로 영상 분석 정보를 생성하는 단계; 상기 운전자 음성 정보를 기반으로 음성 분석 정보를 생성하는 단계; 및 상기 운전자 생체 신호 정보를 기반으로 생체 신호 분석 정보를 생성하는 단계; 를 포함하고, 상기 분석 정보는 상기 영상 분석 정보, 상기 음성 분석 정보 또는 상기 생체 신호 분석 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 운전자 영상 정보는 상기 운전자의 얼굴 영상 또는 상기 운전자의 동공 영상 중 적어도 하나를 포함하고, 상기 운전자 생체 신호 정보는 상기 운전자의 맥박 정보, 상기 운전자의 체온 정보 또는 상기 운전자의 뇌파 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 진동 신호 모델링 정보는 하나 또는 그 이상의 진동 성분들을 포함하고, 상기 진동 성분들은 비트 진동 성분 또는 화음 진동 성분 중 적어도 하나를 포함하고, 상기 진동 신호 모델링 정보는 각 진동 성분의 주기 정보, 상기 각 진동 성분의 재생 시점 정보, 상기 각 진동 성분의 정지 시점 정보 또는 상기 각 진동 성분의 재생 시간 정보 중 적어도 하나를 포함할 수 있다.
또한, 실시예들에 따른 상기 진동 신호 모델링 정보는 인공지능 학습모델에 상기 분석 정보가 입력되어 생성될 수 있다.
또한, 실시예들에 따른 상기 인공지능 학습모델은, 차량의 운전자의 상태 정보에 기반한 분석 정보가 입력되는 것에 대응하여, 상기 입력된 분석 정보에 대응하는 진동 신호 모델링 정보를 출력하도록 학습될 수 있다.
또한, 실시예들에 따른 상기 주행 정보는 상기 차량의 속도 정보를 포함하고, 상기 진동 신호는 상기 진동 신호 모델링 정보 또는 경고성 진동 신호 모델링 정보 중 적어도 하나를 기반으로 생성될 수 있다.
또한, 실시예들에 따른 상기 진동 신호를 생성하는 단계는, 상기 주행 정보가 상기 차량의 주행 방해 상태를 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보 및 상기 경고성 진동 신호 모델링 정보를 기반으로 상기 진동 신호를 생성하고, 상기 주행 정보가 상기 차량의 상기 주행 방해 상태가 아님을 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보를 기반으로 상기 진동 신호를 생성하는 단계; 를 포함할 수 있다.
또한, 실시예들에 따른 상기 방법은, 상기 생성된 진동 신호를 상기 차량의 시트 또는 상기 차량의 스티어링 휠 중 적어도 하나에 전달하는 단계; 를 더 포함할 수 있다.
실시예들은, 운전자의 신체 상태 또는 감정을 고려하여 생성된 차량용 진동을 제공할 수 있다.
또한, 실시예들은, 운전자의 신체 상태 또는 감정와 더불어, 차량의 주행 경고 상태를 더 고려하여 생성된 차량용 진동을 제공할 수 있다.
이 외에, 본 문서를 통해 직접적 또는 간접적으로 파악되는 다양한 효과들이 제공될 수 있다.
도 1은 실시예들에 따른 차량용 진동 생성 장치의 예시를 나타낸다.
도 2는 실시예들에 따른 영상 분석부 동작의 예시를 나타내는 플로우 차트이다.
도 3은 실시예들에 따른 진동 신호 모델링 정보의 예시를 설명하기 위한 도면이다.
도 4는 실시예들에 따른 진동 신호 모델링 정보 생성부 동작의 예시를 설명하기 위한 도면이다.
도 5는 실시예들에 따른 진동 신호 생성부 동작의 예시를 나타내는 플로우 차트이다.
도 6은 실시예들에 따른 차량용 진동 생성 방법의 예시를 나타내는 플로우 차트이다.
도 2는 실시예들에 따른 영상 분석부 동작의 예시를 나타내는 플로우 차트이다.
도 3은 실시예들에 따른 진동 신호 모델링 정보의 예시를 설명하기 위한 도면이다.
도 4는 실시예들에 따른 진동 신호 모델링 정보 생성부 동작의 예시를 설명하기 위한 도면이다.
도 5는 실시예들에 따른 진동 신호 생성부 동작의 예시를 나타내는 플로우 차트이다.
도 6은 실시예들에 따른 차량용 진동 생성 방법의 예시를 나타내는 플로우 차트이다.
이하, 본 발명의 일부 실시예들을 예시적인 도면을 통해 상세하게 설명한다. 각 도면의 구성요소들에 참조부호를 부가함에 있어서, 동일한 구성요소들에 대해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한, 본 발명의 실시예를 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 발명의 실시예에 대한 이해를 방해한다고 판단되는 경우에는 그 상세한 설명은 생략한다.
본 발명의 실시예의 구성 요소를 설명하는 데 있어서, 제 1, 제 2, A, B, (a), (b) 등의 용어를 사용할 수 있다. 이러한 용어는 그 구성 요소를 다른 구성 요소와 구별하기 위한 것일 뿐, 그 용어에 의해 해당 구성 요소의 본질이나 차례 또는 순서 등이 한정되지 않는다. 또한, 다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가진다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 가진 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.
이하, 도 1 내지 도 6을 참조하여, 본 발명의 실시예들을 구체적으로 설명하기로 한다.
도 1은 실시예들에 따른 차량용 진동 생성 장치의 예시를 나타낸다.
이 도면은 실시예들에 따른 차량용 진동 생성 장치(또는 장치, 1000)의 예시를 나타낸다.
일반적으로 차량은 진동을 생성하여, 시트(seat) 또는 스티어링 휠(steering wheel)을 통해 차량의 운전자에게 전달하나, 일관적인 방법을 통해 진동을 생성하여 전달하므로 운전자의 신체 상태 또는 감정을 고려하지 못하는 문제점이 있다. 또한, 일부 차량의 스티어링 휠에서 진동 경고를 발생시키는 시스템이 존재하나, 이 역시 운전자의 신체 상태 또는 감정을 고려하지 못하는 문제점이 있다.
실시예들에 따른 장치는 차량 운전자의 신체 상태 또는 감정을 파악하여, 알맞은 진동 신호를 생성할 수 있다. 즉, 실시예들에 따른 장치는 차량의 주행 중 운전자의 신체 및/또는 감정 상태를 반영한 진동 신호를 생성하고, 과속 운행 등과 같은 주행 방해 상태를 판단하여, 적절한 진동을 생성할 수 있다.
실시예들에 따른 장치는 상태 분석부(1001), 모델링 정보 생성부(1002) 및/또는 진동 신호 생성부(1003)을 포함할 수 있다. 실시예들에 따른 장치는 이 도면에 도시되어 있지 않은 하나 또는 그 이상의 엘리먼트(element)들을 더 포함할 수 있다.
실시예들에 따른 상태 분석부는 차량의 운전자의 상태 정보를 수신하고, 상태 정보를 기반으로 분석 정보를 생성할 수 있다. 실시예들에 따른 운전자의 상태 정보는 운전자의 신체 상태 또는 감정을 파악하기 위한 정보를 나타낼 수 있다. 예를 들어, 운전자의 상태 정보는 운전자 영상 정보, 운전자 음성 정보 또는 운전자 생체 신호 정보 중 적어도 하나를 포함한다. 실시예들에 따른 분석 정보는 상태 정보를 기반으로 분석된, 운전자의 신체 상태 및/또는 감정 상태를 나타내는 정보이다. 예를 들어, 분석 정보는 운전자의 신체 상태에 대한 수치를 나타낸다.
실시예들에 들에 따른 상태 분석부는 영상 분석부(1004), 음성 분석부(1005) 및/또는 생체 신호 분석부(1006)를 포함할 수 있다. 실시예들에 따른 영상 분석부, 음성 분석부 및 생체 신호 분석부에 대한 구체적인 설명은 도 2 에서 후술한다.
실시예들에 따른 모델링 정보 생성부(또는 진동 신호 모델링 정보 생성부)는 분석 정보를 기반으로 차량의 진동을 위한 진동 신호 모델링 정보를 생성할 수 있다. 실시예들에 따른 진동 신호 모델링 정보는 차량의 시트 또는 스티어링 휠에 전달될 진동 신호를 모델링 하기 위한 정보일 수 있다. 실시예들에 따른 진동 신호 모델링 정보에 대한 구체적인 설명은 도 3 에서 후술한다. 실시예들에 따른 진동 신호 모델링 정보를 생성하는 과정에 대한 구체적인 설명은 도 4 에서 후술한다.
실시예들에 따른 진동 신호 생성부는 생성된 진동 신호 모델링 정보 및 차량의 주행 정보를 기반으로 진동 신호를 생성할 수 있다. 실시예들에 따른 주행 정보는 상술한 차량이 주행 방해 상태인지 여부를 판단하기 위한 정보일 수 있다. 예를 들어, 주행 정보는 차량의 속도 정보를 포함한다. 실시예들에 따른 진동 신호 생성부가 진동 신호를 생성하는 과정에 대한 구체적인 설명은 도 5 에서 후술한다.
실시예들에 따른 장치는 이 도면에서 설명하는 방법에 의하여, 차량 운전자의 신체 상태 또는 감정을 파악하여, 알맞은 진동 신호를 생성할 수 있다. 또한, 실시예들에 따른 장치는 주행 정보를 기반으로 차량의 주행 방해 상태를 더 고려하여, 운전자의 안전을 고려한 진동 신호를 생성할 수 있다.
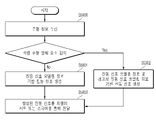
도 2는 실시예들에 따른 영상 분석부 동작의 예시를 나타내는 플로우 차트이다.
이 도면은 실시예들에 따른 영상 분석부(도 1의 영상 분석부(1004)) 동작의 예시를 나타내는 플로우 차트이다.
도 1 에서 상술한 바와 같이, 실시예들에 따른 영상 분석부는 차량의 운전자의 상태 정보를 수신하고, 수신된 상태 정보를 기반으로 분석 정보를 생성할 수 있다. 도 1 에서 상술한 바와 같이, 실시예들에 따른 상태 정보는 운전자 영상 정보, 운전자 음성 정보 또는 운전자 생체 신호 정보 중 적어도 하나를 포함할 수 있다.
실시예들에 따른 영상 분석부는 적어도 2개 이상의 운전자 상태 정보가 입력된 것에 대응하여 동작할 수 있다(S2000). 예를 들어, 영상 분석부는 운전자 영상 정보 및 운전자 음성 정보가 입력된 것에 대응하여 동작한다.
실시예들에 따른 영상 분석부는 입력된 정보 별로 분석을 수행할 수 있다.
실시예들에 따른 영상 분석부, 음성 분석부 및 생체 신호 정보 분석부가 각각 생성하는 영상 분석 정보, 음성 분석 정보 및 생체 신호 분석 정보는 도 1 에서 상술한 분석 정보에 포함되는 정보일 수 있다.
실시예들에 따른 영상 분석부는 입력된 운전자 영상 정보를 기반으로 영상 분석 정보를 생성할 수 있다. 실시예들에 따른 운전자 영상 정보는 운전자의 얼굴 영상 또는 운전자의 동공 영상 중 적어도 하나를 포함할 수 있다.
실시예들에 따른 영상 분석부는 영상 인공지능 학습모델을 기반으로 영상 분석 정보를 생성할 수 있다(S2001). 예를 들어, 영상 분석부는 Fast R-CNN (Fast Region-based Convolutional Network) 알고리즘을 기반으로 영상 분석 정보를 생성한다. 영상 분석부는 상술한 운전자의 얼굴 영상에 포함된 혈류 영상을 기반으로 운전자의 맥박수를 추정하거나, 운전자의 동공 영상을 기반으로 운전자의 감정 또는 신체 상태를 추정할 수 있다.
실시예들에 따른 음성 분석부는 음성 인공지능 학습모델을 기반으로 음성 분석 정보를 생성할 수 있다(S2002). 예를 들어, 음성 분석부는 음성 정보에 대하여 FFT(Fast Fourier Transform) 분석을 통하여 음성 분석 정보를 생성한다. 음성 분석부는 상술한 운전자의 음성 정보에 포함된 운전자 음성의 떨림의 주파수, 음색 변화 등을 기반으로 운전자의 감정 또는 신체 상태를 추정할 수 있다.
실시예들에 따른 생체 신호 분석부는 운전자 생체 신호 정보를 기반으로 생체 신호 분석 정보를 생성할 수 있다. 실시예들에 따른 운전자 생체 신호 정보는 운전자의 맥박 정보, 운전자의 체온 정보 또는 운전자의 뇌파 정보 중 적어도 하나를 포함할 수 있다.
실시예들에 따른 생체 신호 분석부는 인공지능 학습모델을 기반으로 생체 신호 분석 정보를 생성할 수 있다(S2003). 생체 신호 분석부는 생체 신호 정보에 포함된 맥박 정보, 체온 정보 또는 뇌파 정보 등을 기반으로 운전자의 감정 또는 신체 상태를 추정할 수 있다.
실시예들에 따른 상태 분석부는 생성된 영상 분석 정보, 음성 분석 정보 및/또는 생체 신호 분석 정보를 기반으로 분석 정보를 생성할 수 있다(S2004). 도 1 에서 상술한 바와 같이, 실시예들에 따른 분석 정보는 상태 정보를 기반으로 분석된, 운전자의 신체 상태 및/또는 감정 상태를 나타내는 정보이다.
실시예들에 따른 상태 분석부는 생성된 분석 정보를 진동 신호 모델링 정보 생성부(도 1 의 모델링 정보 생성부(1002))로 전달할 수 있다.
실시예들에 따른 장치는 이 도면에서 설명하는 방법에 의하여, 차량 운전자의 신체 상태 또는 감정을 파악하여, 알맞은 진동 신호를 생성할 수 있다. 또한, 실시예들에 따른 장치는 주행 정보를 기반으로 차량의 주행 방해 상태를 더 고려하여, 운전자의 안전을 고려한 진동 신호를 생성할 수 있다.
도 3은 실시예들에 따른 진동 신호 모델링 정보의 예시를 설명하기 위한 도면이다.
이 도면은 실시예들에 따른 진동 신호 모델링 정보(도 1 에서 설명한 진동 신호 모델링 정보)의 예시를 나타낸다.
도 1 에서 상술한 바와 같이, 진동 신호 모델링 정보 생성부(도 1 의 모델링 정보 생성부(1002))는 생성된 분석 정보(도 1 내지 도 2 에서 상술한 분석 정보)를 기반으로 차량의 진동(도 1 에서 상술한 차량의 진동)을 위한 진동 신호 모델링 정보를 생성할 수 있다. 실시예들에 따른 진동 신호 모델링 정보는 차량의 시트 또는 스티어링 휠에서의 진동을 구현하기 위한 모델링 정보일 수 있다.
실시예들에 따른 진동 신호 모델링 정보는 진동 파형으로 표현되고, 하나 또는 그 이상의 진동 성분들을 포함할 수 있다. 실시예들에 따른 진동 성분은 진동 신호 모델링 정보를 구성하는 단위일 수 있다. 실시예들에 따른 진동 신호 모델링 정보를 구성하는 진동 신호들은 비트(beat) 진동 성분 또는 화음(harmony) 진동 성분 중 적어도 하나를 포함할 수 있다. 비트 진동 성부는 비트 형식의 진동 성분을 나타내고, 화음 진동 성분은 두 개 이상의 진동 성분들로 구성된 진동 성분을 나타낼 수 있다. 실시예들에 따른 진동 신호 모델링 정보는 각 진동 성분의 주기 정보, 각 진동 성분의 재생 시점 정보, 각 진동 성분의 정지 시점 정보 또는 각 진동 성분의 재생 시간 정보 중 적어도 하나를 더 포함할 수 있다.
이 도면에 도시된 파형들은 진동 신호 모델링 정보를 구성하는 하나의 비트 진동 성분 및 하나의 화음 진동 성분(예를 들어, 제 1 성분 내지 제 3 성분으로 이루어진 화음 진동 성분)의 예시를 나타낸다.
예를 들어, 진동 신호 모델링 정보는 비트 진동 성분의 주기 정보, 비트 진동 성분의 형태 및 크기 정보, 화음 진동 성분의 재생 시간 정보, 제 1 성분 내지 제 3 성분의 진폭 정보, 재생 시점 정보 또는 정지 시점 정보를 더 포함할 수 있다.
3000은 상술한 비트 진동 성분의 주기 정보를 나타낼 수 있다. 3001은 상술한 비트 진동 성분의 비트 형태 및 크기 정보를 나타낼 수 있다.
3003는 상술한 화음 진동 성분의 재생 시간 정보를 나타낼 수 있다. 3004는 화음 진동 성분을 구성하는 제 1 성분의 정지 시점 정보를 나타낼 수 있다. 3005는 화음 진동 성분을 구성하는 제 1 성분의 진폭 정보를 나타낼 수 있다. 3006은 화음 진동 성분을 구성하는 제 2 성분의 재생 시점 정보를 나타낼 수 있다. 3007는 화음 진동 성분을 구성하는 제 2 성분의 정지 시점 정보를 나타낼 수 있다. 3008은 화음 진동 성분을 구성하는 제 2 성분의 진폭 정보를 나타낼 수 있다. 3009는 화음 진동 성분을 구성하는 제 3 성분의 재생 시점 정보를 나타낼 수 있다. 3010은 화음 진동 성분을 구성하는 제 3 성분의 정지 시점 정보를 나타낼 수 있다.
상술한 바와 같이, 실시에들에 따른 진동 신호 모델링 정보를 하나 또는 그 이상의 진동 성분들의 조합으로 표현될 수 있다. 하나 또는 그 이상의 진동 성분들을 조합하여, 진동 신호 모델링 정보를 구성하는 방식은 음악 작곡 방식과 동일 또는 유사할 수 있다. 즉, 비트 진동 성분은 타악기 효과음에 대응하고, 화음 진동 성분을 구성하는 진동 성분들은 각각 화음을 구성하는 건반음에 대응할 수 있다.
실시예들에 따른 장치는 이 도면에서 설명하는 방법에 의하여, 차량 운전자의 신체 상태 또는 감정을 파악하여, 알맞은 진동 신호를 생성할 수 있다. 또한, 실시예들에 따른 장치는 주행 정보를 기반으로 차량의 주행 방해 상태를 더 고려하여, 운전자의 안전을 고려한 진동 신호를 생성할 수 있다.
도 4는 실시예들에 따른 진동 신호 모델링 정보 생성부 동작의 예시를 설명하기 위한 도면이다.
이 도면은 실시예들에 따른 진동 신호 모델링 정보 생성부(4000, 도 1 및 도 3에서 설명한 진동 신호 모델링 정보 생성부) 동작의 예시를 설명하기 위한 도면이다.
실시예들에 따른 진동 신호 모델링 정보 생성부는 인공지능 학습모델에 기반하여 진동 신호 모델링 정보를 생성할 수 있다. 즉, 진동 신호 모델링 정보는 인공지능 학습모델에 분석 정보가 입력되어 생성될 수 있다.
상술한 인공지능 학습모델은 입력과 출력 상이 데이터 주어지는 경우, 입력과 출력 사이의 매핑(mapping)을 학습하는 지도 학습(supervised learning) 모델일 수 있다. 실시예들에 따른 인공지능 학습모델이 사용하는 학습 방식은 상술한 예시에 국한되지 않는다.
실시예들에 따른 인공지능 학습모델(4001)은 사전에 학습된 학습모델일 수 있다. 인공지능 학습모델은 다양한 운전자 상태 정보에 기반한 분석 정보 별로, 적합한 진동 신호 모델링 정보를 생성하도록 학습된 모델일 수 있다. 예를 들어, 인공지능 학습모델은 차량의 운전자의 상태 정보에 기반한 분석 정보가 입력되는 것에 대응하여, 입력된 분석 정보에 대응하는 진동 신호 모델링 정보를 출력하도록 학습된 지도 학습 모델이다. 상술한 적합한 진동 신호 모델링 정보인지 여부는 사용자 테스트를 거쳐 검증될 수 있다.
상술한 바와 같이, 실시예들에 따른 진동 신호 모델링 정보 생성부는 입력된 분석 정도 및 사전 학습된 학습모델을 기반으로 적절한 진동 신호 모델링 정보를 예측하는 과정(4002)을 수행할 수 있다.
실시예들에 따른 예측된(또는 생성된) 진동 신호 모델링 정보는 도 3 에서 상술한 바와 같이, 하나 또는 그 이상의 진동 성분들에 대한 정보를 포함할 수 있다. 예를 들어, 예측된 진동 신호 모델링 정보는 비트 진동 성분 및 화음 진동 성분을 포함할 수 있다. 또한, 진동 신호 모델링 정보는 비트 진동 성분의 비트 형태, 비트 크기, 비트 주기, 화음 진동 성분의 재생 시간, 화음 진동 성분의 제 1 성분의 주파수, 재생 시점, 정지 시점, 화음 진동 성분의 제 2 성분의 주파수, 재생 시점, 정지 시점 등을 포함할 수 있다.
실시예들에 따른 장치는 이 도면에서 설명하는 방법에 의하여, 차량 운전자의 신체 상태 또는 감정을 파악하여, 알맞은 진동 신호를 생성할 수 있다. 또한, 실시예들에 따른 장치는 주행 정보를 기반으로 차량의 주행 방해 상태를 더 고려하여, 운전자의 안전을 고려한 진동 신호를 생성할 수 있다.
도 5는 실시예들에 따른 진동 신호 생성부 동작의 예시를 나타내는 플로우 차트이다.
이 도면은 실시예들에 따른 진동 신호 생성부(도 1 의 진동 신호 생성부(1003)) 동작의 예시를 나타내는 플로우 차트이다.
도 1 에서 상술한 바와 같이, 진동 신호 생성부는 생성된 진동 신호 모델링 정보 및 차량의 주행 정보를 기반으로 진동 신호를 생성할 수 있다.
실시예들에 따른 주행 정보는 도 1 에서 상술한 바와 같이, 차량이 주행 방해 상태인지 여부를 판단하기 위한 정보일 수 있다. 실시예들에 따른 주행 정보는 차량에 포함된 하나 또는 그 이상의 센서로부터 측정되어, 진동 신호 생성부로 입력될 수 있다. 예를 들어, 주행 정보는 CAN (Controller Area Network) 통신을 기반으로 진동 신호 생성부에 입력된다.
실시예들에 따른 진동 신호 생성부는 주행 정보를 기반으로 차량의 주행이 방해 받는 상태인지 여부를 판단할 수 있다. 실시예들에 따른 주행 정보는 차량의 속도 정보 등을 포함할 수 있다.
상술하 바와 같이, 실시예들에 따른 진동 신호 생성부는 주행 정보를 수신받을 수 있다(S5000).
실시예들에 따른 진동 신호 생성부는 주행 정보가 차량의 주행 방해 상태가 아님을 나타내는 것에 대응하여, 진동 신호 모델링 정보를 기반으로 진동 신호를 생성할 수 있다(S5001).
실시예들에 따른 진동 신호 생성부는 주행 정보가 차량의 주행 방해 상태를 나타내는 것에 대응하여, 진동 신호 모델링 정보 및 경고성 진동 신호 모델링 정보를 기반을 진동 신호를 생성할 수 있다(S5002).
실시예들에 따른 경고성 진동 신호 모델링 정보는 차량 운전자에게 주의를 환기시키기 위한 진동일 수 있다. 예를 들어, 경고성 진동 신호 모델링 정보는 도 3에서 상술한 비트 진동 성분만을 포함할 수 있다.
즉, 실시예들에 따른 진동 신호는 진동 신호 모델링 정보 또는 경고성 진동 신호 모델링 정보 중 적어도 하나를 기반으로 생성될 수 있다.
실시예들에 따른 진동 신호 생성부(또는 차량용 진동 생성 장치(1000))는 생성된 진동 신호를 차량의 시트 또는 차량의 스티어링 휠 중 적어도 하나에 전달할 수 있다(S5003). 진동 신호를 전달받은 시트 또는 스티어링 휠은 내장된 액츄에이터(actuator)를 기반으로 진동 신호에 대응하는 진동을 구현할 수 있다.
실시예들에 따른 장치는 이 도면에서 설명하는 방법에 의하여, 차량 운전자의 신체 상태 또는 감정을 파악하여, 알맞은 진동 신호를 생성할 수 있다. 또한, 실시예들에 따른 장치는 주행 정보를 기반으로 차량의 주행 방해 상태를 더 고려하여, 운전자의 안전을 고려한 진동 신호를 생성할 수 있다.
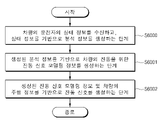
도 6은 실시예들에 따른 차량용 진동 생성 방법의 예시를 나타내는 플로우 차트이다.
이 도면은 실시예들에 따른 차량용 진동 생성 방법(또는 방법)의 예시를 나타내는 플로우 차트이다. 실시예들에 따른 방법은 차량용 진동 생성 장치(도 1 에서 상술한 장치(1000))에 의해 수행될 수 있다.
실시예들에 따른 차량용 진동 생성 방법은 차량의 운전자의 상태 정보를 수신하고, 상태 정보를 기반으로 분석 정보를 생성하는 단계(S6000), 생성된 분석 정보를 기반으로 차량의 진동을 위한 진동 신호 모델링 정보를 생성하는 단계(S6001), 및/또는 생성된 진동 신호 모델링 정보 및 차량의 주행 정보를 기반으로 진동 신호를 생성하는 단계(S6002)를 포함할 수 있다.
실시예들에 따른 운전자의 상태 정보는 운전자 영상 정보, 운전자 음성 정보 또는 운전자 생체 신호 정보 중 적어도 하나를 포함할 수 있다. 실시예들에 따른 운전자의 상태 정보에 대한 설명은 도 1 내지 도 4에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 S6000 단계는 운전자 영상 정보를 기반으로 영상 분석 정보를 생성하는 단계, 운전자 음성 정보를 기반으로 음성 분석 정보를 생성하는 단계 및/또는 운전자 생체 신호 정보를 기반으로 생체 신호 분석 정보를 생성하는 단계를 포함할 수 있다. 상술한 단계들에 대한 설명은 도 2 에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 분석 정보는 영상 분석 정보, 음성 분석 정보 또는 생체 신호 분석 정보 중 적어도 하나를 포함할 수 있다. 실시예들에 따른 분석 정보에 대한 설명은 도 1 내지 도 4에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 운전자 영상 정보는 운전자의 얼굴 영상 또는 운전자의 동공 영상 중 적어도 하나를 포함할 수 있다. 실시예들에 따른 운전자 생체 신호 정보는 운전자의 맥박 정보, 운전자의 체온 정보 또는 운전자의 뇌파 정보 중 적어도 하나를 포함할 수 있다.
실시예들에 따른 진동 신호 모델링 정보는 하나 또는 그 이상의 진동 성분들을 포함할 수 있다. 실시예들에 따른 진동 성분들은 비트 진동 성분 또는 화음 진동 성분 중 적어도 하나를 포함할 수 있다. 실시예들에 따른 진동 신호 모델링 정보는 각 진동 성분의 주기 정보, 각 진동 성분의 재생 시점 정보, 각 진동 성분의 정지 시점 정보 또는 각 진동 성분의 재생 시간 정보 중 적어도 하나를 포함할 수 있다. 실시예들에 따른 진동 신호 모델링 정보에 대한 구체적인 설명은 도 3 에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 진동 신호 모델링 정보는 인공지능 학습모델에 상기 분석 정보가 입력되어 생성될 수 있다. 실시예들에 따른 인공지능 학습모델은, 차량의 운전자의 상태 정보에 기반한 분석 정보가 입력되는 것에 대응하여, 입력된 분석 정보에 대응하는 진동 신호 모델링 정보를 출력하도록 학습된 학습모델일 수 있다. 실시예들에 따른 인공지능 학습모델에 대한 구체적인 설명은 도 4 에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 주행 정보는 차량의 속도 정보를 포함할 수 있다. 실시예들에 따른 진동 신호는 진동 신호 모델링 정보 또는 경고성 진동 신호 모델링 정보 중 적어도 하나를 기반으로 생성될 수 있다. 실시예들에 따른 진동 신호가 생성되는 방법에 대한 설명은 도 5 에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 S6002 단계는, 주행 정보가 차량의 주행 방해 상태를 나타내는 것에 대응하여, 진동 신호 모델링 정보 및 경고성 진동 신호 모델링 정보를 기반으로 진동 신호를 생성하고, 주행 정보가 차량의 주행 방해 상태가 아님을 나타내는 것에 대응하여, 진동 신호 모델링 정보를 기반으로 상기 진동 신호를 생성하는 단계를 포함할 수 있다. 상술한 단계에 대한 설명은 도 5 에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 방법은, 생성된 진동 신호를 차량의 시트 또는 차량의 스티어링 휠 중 적어도 하나에 전달하는 단계를 더 포함할 수 있다. 상술한 단계에 대한 설명은 도 5 에서 상술한 바와 동일 또는 유사하다.
실시예들에 따른 장치는 이 도면에서 설명하는 방법에 의하여, 차량 운전자의 신체 상태 또는 감정을 파악하여, 알맞은 진동 신호를 생성할 수 있다. 또한, 실시예들에 따른 장치는 주행 정보를 기반으로 차량의 주행 방해 상태를 더 고려하여, 운전자의 안전을 고려한 진동 신호를 생성할 수 있다.
이상의 설명은 본 발명의 기술 사상을 예시적으로 설명한 것에 불과한 것으로서, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 다양한 수정 및 변형이 가능할 것이다.
따라서, 본 발명에 개시된 실시예들은 본 발명의 기술 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 이러한 실시예에 의하여 본 발명의 기술 사상의 범위가 한정되는 것은 아니다. 본 발명의 보호 범위는 아래의 청구범위에 의하여 해석되어야 하며, 그와 동등한 범위 내에 있는 모든 기술 사상은 본 발명의 권리범위에 포함되는 것으로 해석되어야 할 것이다.
1000: 차량용 진동 생성 장치
1001: 상태 분석부
1002: 모델링 정보 생성부
1003: 진동 신호 생성부
1004: 영상 분석부
1005: 음성 분석부
1006: 생체 신호 분석부
4000: 진동 신호 모델링 정보 생성부
1001: 상태 분석부
1002: 모델링 정보 생성부
1003: 진동 신호 생성부
1004: 영상 분석부
1005: 음성 분석부
1006: 생체 신호 분석부
4000: 진동 신호 모델링 정보 생성부
Claims (20)
- 차량의 운전자의 상태 정보를 수신하고, 상기 상태 정보를 기반으로 분석 정보를 생성하는 상태 분석부;
상기 생성된 분석 정보를 기반으로 상기 차량의 진동을 위한 진동 신호 모델링 정보를 생성하는 진동 신호 모델링 정보 생성부; 및
상기 생성된 진동 신호 모델링 정보 및 상기 차량의 주행 정보를 기반으로 진동 신호를 생성하는 진동 신호 생성부; 를 포함하는,
차량용 진동 생성 장치.
- 제 1 항에 있어서,
상기 운전자의 상태 정보는 운전자 영상 정보, 운전자 음성 정보 또는 운전자 생체 신호 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 장치.
- 제 2 항에 있어서,
상기 상태 분석부는,
상기 운전자 영상 정보를 기반으로 영상 분석 정보를 생성하는 영상 분석부;
상기 운전자 음성 정보를 기반으로 음성 분석 정보를 생성하는 음성 분석부; 및
상기 운전자 생체 신호 정보를 기반으로 생체 신호 분석 정보를 생성하는 생체 신호 분석부; 를 포함하고,
상기 분석 정보는 상기 영상 분석 정보, 상기 음성 분석 정보 또는 상기 생체 신호 분석 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 장치.
- 제 2 항에 있어서,
상기 운전자 영상 정보는 상기 운전자의 얼굴 영상 또는 상기 운전자의 동공 영상 중 적어도 하나를 포함하고,
상기 운전자 생체 신호 정보는 상기 운전자의 맥박 정보, 상기 운전자의 체온 정보 또는 상기 운전자의 뇌파 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 장치.
- 제 1 항에 있어서,
상기 진동 신호 모델링 정보는 하나 또는 그 이상의 진동 성분들을 포함하고,
상기 진동 성분들은 비트(beat) 진동 성분 또는 화음(harmony) 진동 성분 중 적어도 하나를 포함하고,
상기 진동 신호 모델링 정보는 각 진동 성분의 주기 정보, 상기 각 진동 성분의 재생 시점 정보, 상기 각 진동 성분의 정지 시점 정보 또는 상기 각 진동 성분의 재생 시간 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 장치.
- 제 1 항에 있어서,
상기 진동 신호 모델링 정보는 인공지능 학습모델에 상기 분석 정보가 입력되어 생성되는,
차량용 진동 생성 장치.
- 제 6 항에 있어서,
상기 인공지능 학습모델은,
차량의 운전자의 상태 정보에 기반한 분석 정보가 입력되는 것에 대응하여, 상기 입력된 분석 정보에 대응하는 진동 신호 모델링 정보를 출력하도록 학습된,
차량용 진동 생성 장치.
- 제 1 항에 있어서,
상기 주행 정보는 상기 차량의 속도 정보를 포함하고,
상기 진동 신호는 상기 진동 신호 모델링 정보 또는 경고성 진동 신호 모델링 정보 중 적어도 하나를 기반으로 생성되는,
차량용 진동 생성 장치.
- 제 8 항에 있어서,
상기 진동 신호는,
상기 주행 정보가 상기 차량의 주행 방해 상태를 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보 및 상기 경고성 진동 신호 모델링 정보를 기반으로 생성되고,
상기 주행 정보가 상기 차량의 상기 주행 방해 상태가 아님을 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보를 기반으로 생성되는,
차량용 진동 생성 장치.
- 제 1 항에 있어서,
상기 생성된 진동 신호는 상기 차량의 시트(seat) 또는 상기 차량의 스티어링 휠(steering wheel) 중 적어도 하나에 전달되는,
차량용 진동 생성 장치.
- 차량의 운전자의 상태 정보를 수신하고, 상기 상태 정보를 기반으로 분석 정보를 생성하는 단계;
상기 생성된 분석 정보를 기반으로 상기 차량의 진동을 위한 진동 신호 모델링 정보를 생성하는 단계; 및
상기 생성된 진동 신호 모델링 정보 및 상기 차량의 주행 정보를 기반으로 진동 신호를 생성하는 단계; 를 포함하는,
차량용 진동 생성 방법.
- 제 11 항에 있어서,
상기 운전자의 상태 정보는 운전자 영상 정보, 운전자 음성 정보 또는 운전자 생체 신호 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 방법.
- 제 12 항에 있어서,
상기 분석 정보를 생성하는 단계는,
상기 운전자 영상 정보를 기반으로 영상 분석 정보를 생성하는 단계;
상기 운전자 음성 정보를 기반으로 음성 분석 정보를 생성하는 단계; 및
상기 운전자 생체 신호 정보를 기반으로 생체 신호 분석 정보를 생성하는 단계; 를 포함하고,
상기 분석 정보는 상기 영상 분석 정보, 상기 음성 분석 정보 또는 상기 생체 신호 분석 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 방법.
- 제 12 항에 있어서,
상기 운전자 영상 정보는 상기 운전자의 얼굴 영상 또는 상기 운전자의 동공 영상 중 적어도 하나를 포함하고,
상기 운전자 생체 신호 정보는 상기 운전자의 맥박 정보, 상기 운전자의 체온 정보 또는 상기 운전자의 뇌파 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 방법.
- 제 11 항에 있어서,
상기 진동 신호 모델링 정보는 하나 또는 그 이상의 진동 성분들을 포함하고,
상기 진동 성분들은 비트 진동 성분 또는 화음 진동 성분 중 적어도 하나를 포함하고,
상기 진동 신호 모델링 정보는 각 진동 성분의 주기 정보, 상기 각 진동 성분의 재생 시점 정보, 상기 각 진동 성분의 정지 시점 정보 또는 상기 각 진동 성분의 재생 시간 정보 중 적어도 하나를 포함하는,
차량용 진동 생성 방법.
- 제 11 항에 있어서,
상기 진동 신호 모델링 정보는 인공지능 학습모델에 상기 분석 정보가 입력되어 생성되는,
차량용 진동 생성 장치.
- 제 16 항에 있어서,
상기 인공지능 학습모델은,
차량의 운전자의 상태 정보에 기반한 분석 정보가 입력되는 것에 대응하여, 상기 입력된 분석 정보에 대응하는 진동 신호 모델링 정보를 출력하도록 학습된,
차량용 진동 생성 방법.
- 제 11 항에 있어서,
상기 주행 정보는 상기 차량의 속도 정보를 포함하고,
상기 진동 신호는 상기 진동 신호 모델링 정보 또는 경고성 진동 신호 모델링 정보 중 적어도 하나를 기반으로 생성되는,
차량용 진동 생성 방법.
- 제 18 항에 있어서,
상기 진동 신호를 생성하는 단계는,
상기 주행 정보가 상기 차량의 주행 방해 상태를 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보 및 상기 경고성 진동 신호 모델링 정보를 기반으로 상기 진동 신호를 생성하고,
상기 주행 정보가 상기 차량의 상기 주행 방해 상태가 아님을 나타내는 것에 대응하여, 상기 진동 신호 모델링 정보를 기반으로 상기 진동 신호를 생성하는 단계; 를 포함하는,
차량용 진동 생성 방법.
- 제 11 항에 있어서,
상기 방법은,
상기 생성된 진동 신호를 상기 차량의 시트 또는 상기 차량의 스티어링 휠 중 적어도 하나에 전달하는 단계; 를 더 포함하는,
차량용 진동 생성 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210074376A KR20220165574A (ko) | 2021-06-08 | 2021-06-08 | 차량용 진동 생성 장치 및 방법 |
| US17/667,788 US20220388529A1 (en) | 2021-06-08 | 2022-02-09 | Apparatus for generating vibration for vehicle, and method thereof |
| CN202210167074.9A CN115452284A (zh) | 2021-06-08 | 2022-02-23 | 用于生成车辆的振动的设备及其方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210074376A KR20220165574A (ko) | 2021-06-08 | 2021-06-08 | 차량용 진동 생성 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220165574A true KR20220165574A (ko) | 2022-12-15 |
Family
ID=84285729
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210074376A KR20220165574A (ko) | 2021-06-08 | 2021-06-08 | 차량용 진동 생성 장치 및 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220388529A1 (ko) |
| KR (1) | KR20220165574A (ko) |
| CN (1) | CN115452284A (ko) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6641595B2 (ja) * | 2016-02-15 | 2020-02-05 | 株式会社ジェイテクト | 車両用警報装置 |
| WO2020167430A2 (en) * | 2019-01-24 | 2020-08-20 | General Vibration Corporation | Aerodynamic eccentric rotating mass attachment for vibration motor |
| US20210261050A1 (en) * | 2020-02-21 | 2021-08-26 | Cobalt Industries Inc. | Real-time contextual vehicle lighting systems and methods |
-
2021
- 2021-06-08 KR KR1020210074376A patent/KR20220165574A/ko unknown
-
2022
- 2022-02-09 US US17/667,788 patent/US20220388529A1/en active Pending
- 2022-02-23 CN CN202210167074.9A patent/CN115452284A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN115452284A (zh) | 2022-12-09 |
| US20220388529A1 (en) | 2022-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Zontone et al. | Stress detection through electrodermal activity (EDA) and electrocardiogram (ECG) analysis in car drivers | |
| GR1000518B (el) | Μεθοδος και συσκευη για την διαγνωση σφαλματων. | |
| KR20200075133A (ko) | 빅데이터 정보 기반 문제소음 발생원 진단 방법 및 장치 | |
| JP7003400B2 (ja) | 対話制御システム | |
| US8822804B1 (en) | Digital aerophones and dynamic impulse response systems | |
| Moukadem et al. | Time-Frequency domain for segmentation and classification of Non-stationary signals: The Stockwell transform applied on Bio-signals and electric signals | |
| US11330384B2 (en) | Artificial intelligence device for diagnosing failure and method thereof | |
| Vladyko et al. | Method of early pedestrian warning in developing intelligent transportation system infrastructure | |
| KR20220165574A (ko) | 차량용 진동 생성 장치 및 방법 | |
| Rosenblum | Perceiving articulatory events: Lessons for an ecological psychoacoustics | |
| JP2020095063A (ja) | 個人認証装置および個人認証プログラム | |
| KR101393055B1 (ko) | 뇌파를 이용한 제어 장치 및 방법 | |
| Mueller et al. | The bowed string as a nonlinear dynamical system | |
| KR100209610B1 (ko) | 뇌파계신호를 이용한 졸음방지장치 및 그 제어방법 | |
| JP7251413B2 (ja) | 疑似異音生成装置および制御プログラム | |
| Dim et al. | A smartphone application for car horn detection to assist hearing-impaired people in driving | |
| KR20230135844A (ko) | 생체 및 감성 반응형 마스킹 사운드 자동 제어 장치, 방법 및 시스템 | |
| JP6575101B2 (ja) | 音楽生成装置 | |
| WO2021001998A1 (ja) | 音モデル生成装置、音モデル生成方法、および記録媒体 | |
| JP6398960B2 (ja) | 音楽再生装置及びプログラム | |
| RU97107068A (ru) | Способ поддержания работоспособности водителя транспортного средства и система для его осуществления | |
| JP2021071341A (ja) | 音・振動評価装置 | |
| KR20230033526A (ko) | 차량의 주행음 생성 장치 및 방법 | |
| KR20200069772A (ko) | 광케이블 감시 시스템 및 광케이블 감시 방법 | |
| US11104257B2 (en) | Notification apparatus and notification method |