KR20220068043A - 정밀 지도의 오류 판단 장치 및 방법 - Google Patents
정밀 지도의 오류 판단 장치 및 방법 Download PDFInfo
- Publication number
- KR20220068043A KR20220068043A KR1020200154947A KR20200154947A KR20220068043A KR 20220068043 A KR20220068043 A KR 20220068043A KR 1020200154947 A KR1020200154947 A KR 1020200154947A KR 20200154947 A KR20200154947 A KR 20200154947A KR 20220068043 A KR20220068043 A KR 20220068043A
- Authority
- KR
- South Korea
- Prior art keywords
- error
- data
- map
- precision map
- driving
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 66
- 238000012937 correction Methods 0.000 claims abstract description 38
- 230000000052 comparative effect Effects 0.000 claims description 12
- 238000004891 communication Methods 0.000 claims description 8
- 230000004927 fusion Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 3
- 238000010835 comparative analysis Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
- G01C21/32—Structuring or formatting of map data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1652—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with ranging devices, e.g. LIDAR or RADAR
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1656—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with passive imaging devices, e.g. cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3415—Dynamic re-routing, e.g. recalculating the route when the user deviates from calculated route or after detecting real-time traffic data or accidents
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3859—Differential updating map data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/387—Organisation of map data, e.g. version management or database structures
- G01C21/3874—Structures specially adapted for data searching and retrieval
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3885—Transmission of map data to client devices; Reception of map data by client devices
- G01C21/3889—Transmission of selected map data, e.g. depending on route
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/301—Sensors for position or displacement
- B60Y2400/3015—Optical cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/301—Sensors for position or displacement
- B60Y2400/3017—Radars
Abstract
본 발명은 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 라이더 센서나 V2X 모듈에 의해 자율 주행 중 획득한 후, 획득한 기준정보를 토대로 정밀 지도의 오류 여부를 판단하여 수정함과 아울러, 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우 자율 주행을 위한 주행 제어정보를 수정하여 자율 주행이 안정적으로 지속될 수 있게 한 정밀 지도의 오류 판단 장치 및 방법에 관한 것이다.
Description
본 발명은 정밀 지도에 오류가 있는지 여부를 자율 주행 차량에서 판단할 수 있게 한 정밀 지도의 오류 판단 장치 및 방법에 관한 것이다.
일반적으로 자율 주행 차량은 주행 중 획득하는 주변 정보에 의하여 주행 중인 도로가 주행 경로에 일치하는지 여부를 지속적으로 판단하게 되므로, 이러한 주행 경로 설정의 기반이 되는 정밀 지도에 높은 의존성을 갖게 된다.
그에 따라, 정밀 지도에 오류가 존재할 경우 자율 주행에 치명적인 오류를 야기할 수 있고, 그로 인하여 큰 사고를 초래할 수 있어 정밀 지도에 대한 신뢰도도 다른 데이터들에 비해 더욱 엄격하게 요구된다.
즉, 정밀 지도 상에는 존재하지 않는 신호등이나 횡단보도가 실제 도로에 존재할 경우, 해당 지역을 통과하는 자율 주행 차량에서는 감속이나 정차의 요인이 없기에 정속 주행 상태를 유지하게 되므로, 횡단 중인 보행자에게는 큰 위험을 초래하게 되는 문제점이 있었다.
또한, 이와 반대로 정밀 지도 상에는 과속 방지턱이 존재하는 것으로 저장되어 있지만 실제 도로에서는 과속방지턱이 없는 경우, 해당 지역을 통과하면서 불필요한 감속 제어가 이루어지게 되므로, 교통 흐름에 지장을 초래하게 되는 문제점이 있었다.
이와 같이 정밀 지도는 차량이 자율 주행을 수행함에 있어 중요한 기반이 되는바, 자율 주행 중인 차량 자체적으로 현재 주행의 기반이 되는 정밀 지도의 오류 여부를 직접 판단하고 검증하여 정밀 지도의 신뢰도를 향상시킬 수 있는 수단에 대한 필요성은 여전하다.
또한, 차량에서 라이더 센서 등을 통하여 직접 인식한 실제 도로상의 센싱 데이터에 의해 수정된 정밀 지도를 토대로 안전한 주행 경로를 실시간으로 수정 생성한 후 차량의 자율 주행이 이루어질 수 있게 함으로써, 안전하면서도 교통 흐름에 방해를 초래하지 않도록 자율 주행을 제어할 수 있는 수단에 대한 요청도 여전하다.
본 발명의 실시예는, 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 라이더 센서나 V2X 모듈에 의해 자율 주행 중 획득한 후, 획득한 기준정보를 토대로 정밀 지도의 오류 여부를 판단하여 수정함과 아울러, 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우 자율 주행을 위한 주행 제어정보를 수정하여 자율 주행이 안정적으로 지속될 수 있게 한 정밀 지도의 오류 판단 장치 및 방법을 제공하는 것을 기술적 과제로 한다.
본 발명의 기술적 과제들은 이상에서 언급한 기술적 과제로 제한되지 않으며, 언급되지 않은 또 다른 기술적 과제들은 아래의 기재들로부터 당업자에게 명확하게 이해될 수 있을 것이다.
본 발명의 실시예에 따른 정밀 지도의 오류 판단 장치는, 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 자율 주행 중 실시간으로 획득하는 기준정보 획득모듈; 상기 정밀 지도상의 데이터를 기준정보와 비교하여 정밀 지도의 오류 여부를 판단하는 오류 판단모듈; 및 상기 기준정보에 의한 정밀 지도상의 데이터 수정 여부를 결정하고 수정하는 지도 오류 수정모듈;을 포함하는 것을 특징으로 한다.
또한, 상기 기준정보 획득모듈은, 자율 주행 중인 차량에 구비된 상기 라이더 센서에 의해 정밀 지도상의 데이터와 비교하기 위한 주변 사물에 대한 사물 센싱 데이터를 기준정보로 획득하는 센서 데이터 수신부;를 포함하는 것을 특징으로 한다.
또한, 상기 기준정보 획득모듈은, 주변 차량과의 데이터 통신을 위한 V2X(Vehicle to everything) 모듈에 의해 적어도 하나 이상의 다른 차량으로부터 수신하는 비교 지도 데이터를 기준정보로 획득하는 V2X 데이터 수신부;를 더 포함하는 것을 특징으로 한다.
또한, 상기 오류 판단모듈은, 상기 기준정보를 정밀 지도상의 해당 사물에 대한 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도에 오류가 있는 것으로 인식하는 센싱 데이터 비교부;를 포함하는 것을 특징으로 한다.
또한, 상기 센싱 데이터 비교부는, 상기 센서 데이터 수신부에서 획득한 신호등 정보와 도론 노면 정보 및 차선 정보로 이루어진 사물 센싱 데이터를 정밀 지도에 포함되어 있는 신호등 정보와 도로 노면 정보 및 차선 정보와 각각 비교하여, 정밀 지도에서 각 사물에 대한 존재 여부, 위치, 유형 또는 모양 중 적어도 하나의 데이터에 오류가 존재하는지 여부를 판단하는 것을 특징으로 한다.
또한, 상기 오류 판단모듈은, 상기 V2X 데이터 수신부에서 다른 차량으로부터 수신한 비교 지도 데이터를 정밀 지도상의 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 인식하는 V2X 데이터 비교부;를 더 포함하는 것을 특징으로 한다.
또한, 상기 오류 판단모듈은, 비교하고자 하는 정밀 지도상의 데이터와 상기 V2X 데이터 수신부에서 수신한 비교 지도 데이터의 총량이 실시간 처리가 가능한 일정 기준의 양을 초과할 경우, 자율 주행 중인 차량의 주행 경로와 겹쳐지는 영역만을 비교대상으로 결정하여 정밀 지도의 오류 여부를 판단하는 비교대상 특정부;를 더 포함하는 것을 특징으로 한다.
또한, 본 발명의 실시예에 따른 정밀 지도의 오류 판단 장치는, 상기 오류 판단모듈에서의 판단 결과 정밀 지도에 오류가 있는 것으로 판단되고, 해당 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우, 자율 주행을 위한 주행 제어정보를 수정하는 주행 경로 제어모듈;을 더 포함하는 것을 특징으로 한다.
또한, 상기 주행 경로 제어모듈은, 정밀 지도의 오류 존재 영역이 주행 경로상에 있을 경우, 상기 오류 존재 영역을 주행하는 차량의 가감속 여부와 차선 변경여부를 포함하는 차량의 주행 제어정보를 오류가 수정된 내용에 따라 변경하는 것을 특징으로 한다.
또한, 상기 주행 경로 제어모듈은, 정밀 지도상에 존재하는 오류에 의하여 차량이 현재의 주행 경로로 주행을 지속하기 어렵다고 판단될 경우, 현재 위치에서 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 우회경로를 생성한 후, 생성된 우회경로를 새로운 주행 경로로 수정하여 자율 주행을 지속하는 것을 특징으로 한다.
또한, 상기 주행 경로 제어모듈은, 정밀 지도상의 오류 존재 영역이 현재의 주행 경로와 중복되고, 목적지에 도달할 수 있는 우회경로를 생성하지 못하는 것으로 판단될 경우, 차량을 긴급 정차시킨 후 운전자에게 차량의 제어권을 넘기도록 제어하는 것을 특징으로 한다.
또한, 본 발명의 다른 실시예에 따른 정밀 지도의 오류 판단 방법은, 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 자율 주행 중 실시간으로 획득하는 기준정보 획득단계; 상기 정밀 지도상의 데이터를 기준정보와 비교하여 정밀 지도의 오류 여부를 판단하는 오류 판단단계; 및 상기 기준 정보에 의한 정밀 지도상의 데이터 수정 여부를 결정하고 수정하는 지도 오류 수정단계;를 포함하는 것을 특징으로 한다.
또한, 상기 기준정보 획득단계는, 차량에 구비된 라이더 센서에서 인식되는 주변 사물의 존부, 위치 및 외형과 관련된 사물 센싱 데이터를 정밀 지도상의 데이터와 비교하기 위한 기준정보로 획득하는 센서 데이터 수신과정;을 포함하는 것을 특징으로 한다.
또한, 상기 기준정보 획득단계는, 주변 차량과의 데이터 통신을 위한 V2X(Vehicle to everything) 모듈에 의해 주변의 다른 차량으로부터 수신하는 비교 지도 데이터를 기준정보로 획득하는 V2X 데이터 수신과정;을 포함하는 것을 특징으로 한다.
또한, 본 발명의 다른 실시예에 따른 정밀 지도의 오류 판단 방법은, 상기 오류 판단단계에서의 판단 결과 정밀 지도에 오류가 있는 것으로 판단되고, 해당 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우 자율 주행을 위한 주행 제어정보를 수정하는 주행 경로 제어단계;를 더 포함하는 것을 특징으로 한다.
또한, 상기 주행 경로 제어단계는, 정밀 지도의 오류 존재 영역이 주행 경로상에 있을 경우, 상기 오류 존재 영역을 자율 주행하는 차량의 가감속 여부와 차선 변경여부를 포함하는 차량의 주행 제어정보를 오류가 수정된 내용에 따라 변경하도록 제어하는 것을 특징으로 한다.
또한, 상기 주행 경로 제어단계는, 정밀 지도상에 존재하는 오류에 의하여 차량이 현재 주행 경로로 주행을 지속하기 어렵다고 판단될 경우, 현재 위치에서 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 우회경로를 생성한 후, 생성된 우회경로를 새로운 주행 경로로 수정하여 자율 주행이 지속되도록 제어하는 것을 특징으로 한다.
또한, 상기 주행 경로 제어단계는, 정밀 지도상의 오류 존재 영역이 현재의 주행 경로와 중복됨에도 불구하고, 목적지에 도달할 수 있는 우회경로를 생성하지 못하는 것으로 판단될 경우, 차량을 긴급 정차시킨 후 운전자에게 차량의 제어권을 넘기도록 제어하는 것을 특징으로 한다.
본 발명은 자율 주행 중인 차량에서 라이더 센서에 의해 획득한 사물 센싱 데이터나 V2X 모듈에 의해 획득한 비교 지도 데이터에 의해 자율 주행의 기반이 되는 정밀 지도의 오류 여부를 직접 판단하고, 그 판단 결과에 따라 정밀 지도상의 데이터를 수정할 수 있어, 정밀 지도의 신뢰성을 향상시킬 수 있는 효과가 있다.
또한, 본 발명은 라이더 센서나 V2X 모듈에 의해 획득한 기준정보를 이용하여 오류가 있는 것으로 판단된 오류 존재 영역이 자율 주행을 위한 주행 경로상에 있을 경우, 수정된 정밀 지도상의 데이터에 의해 자율 주행을 위한 차량의 주행 제어정보를 실시간으로 수정함으로써, 자율 주행을 안정적으로 수행할 수 있는 효과가 있다.
또한, 본 발명은 정밀 지도상에 존재하는 오류에 의하여 차량이 현재의 주행 경로로 주행을 지속하기 어렵다고 판단될 경우, 현재 위치에서 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 우회경로를 생성하여 제시함으로써, 자율 주행을 지속할 수 있는 효과가 있다.
이 외에, 본 문서를 통해 직접적 또는 간접적으로 파악되는 다양한 효과들이 제공될 수 있다.
도 1은 본 발명에 따른 정밀 지도의 오류 판단 장치의 블록 구성도.
도 2 및 도 3은 본 발명에 따라 정밀 지도의 오류로 인하여 주행 경로 제어모듈에서 주행 제어정보를 수정하는 것을 나타내는 예시도.
도 4는 본 발명에 따라 정밀 지도에 오류가 존재하여도 주행 경로 제어모듈에서 주행 경로를 유지하는 것을 나타내는 예시도.
도 5는 본 발명에 따라 정밀 지도에 오류가 존재하여 주행 경로 제어모듈에서 우회경로를 생성하는 것을 나타내는 예시도.
도 6은 본 발명에 따라 오류 판단모듈에서 V2X 정보를 비교하는 일 예를 나타내는 예시도.
도 7은 본 발명의 다른 실시예에 따른 정밀 지도의 오류 판단 방법의 구성도.
도 8은 본 발명의 다른 실시예에 따라 정밀 지도의 오류를 검증하고 주행 경로의 우회여부를 판단하는 플로우를 나타내는 순서도.
도 2 및 도 3은 본 발명에 따라 정밀 지도의 오류로 인하여 주행 경로 제어모듈에서 주행 제어정보를 수정하는 것을 나타내는 예시도.
도 4는 본 발명에 따라 정밀 지도에 오류가 존재하여도 주행 경로 제어모듈에서 주행 경로를 유지하는 것을 나타내는 예시도.
도 5는 본 발명에 따라 정밀 지도에 오류가 존재하여 주행 경로 제어모듈에서 우회경로를 생성하는 것을 나타내는 예시도.
도 6은 본 발명에 따라 오류 판단모듈에서 V2X 정보를 비교하는 일 예를 나타내는 예시도.
도 7은 본 발명의 다른 실시예에 따른 정밀 지도의 오류 판단 방법의 구성도.
도 8은 본 발명의 다른 실시예에 따라 정밀 지도의 오류를 검증하고 주행 경로의 우회여부를 판단하는 플로우를 나타내는 순서도.
이하, 본 발명의 일부 실시예들을 예시적인 도면을 통해 상세하게 설명한다. 각 도면의 구성요소들에 참조부호를 부가함에 있어서, 동일한 구성요소들에 대해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한, 본 발명의 실시예를 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 발명의 실시예에 대한 이해를 방해한다고 판단되는 경우에는 그 상세한 설명은 생략한다.
본 발명의 실시예의 구성 요소를 설명하는 데 있어서, 제 1, 제 2, A, B, (a), (b) 등의 용어를 사용할 수 있다. 이러한 용어는 그 구성 요소를 다른 구성 요소와 구별하기 위한 것일 뿐, 그 용어에 의해 해당 구성 요소의 본질이나 차례 또는 순서 등이 한정되지 않는다. 또한, 다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가진다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 가진 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.
이하, 도 1 내지 도 8을 참조하여, 본 발명의 실시예들을 구체적으로 설명하기로 한다.
도 1은 본 발명에 따른 정밀 지도의 오류 판단 장치의 블록 구성도이다.
도 1을 참조하면, 본 발명의 일 실시예에 따른 정밀 지도의 오류 판단 장치는, 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 자율 주행 중 실시간으로 획득하는 기준정보 획득모듈(100)과, 상기 정밀 지도상의 데이터를 기준정보와 비교하여 정밀 지도의 오류 여부를 판단하는 오류 판단모듈(200)과, 상기 기준정보에 의한 정밀 지도상의 데이터 수정 여부를 결정하고 수정하는 지도 오류 수정모듈(300)을 포함할 수 있다.
상기 기준정보 획득모듈(100)은, 차량에 구비된 라이더 센서에서 인식되는 사물 센싱 데이터를 기준정보로 획득하는 센서 데이터 수신부(110)를 포함할 수 있다.
상기 라이더 센서(10)는, 레이저 펄스를 발사하고 그 빛이 차량 주위의 대상 물체에서 반사되어 돌아오는 것을 수신하여 물체까지의 거리를 측정함으로써 주변의 모습을 정밀하게 파악할 수 있다.
그에 따라, 상기 센서 데이터 수신부(110)는 자율 주행 중인 차량에 구비된 상기 라이더 센서(10)에서 획득한 데이터에 의해 정밀 지도상의 데이터와 비교하기 위한 주변 사물의 존부와 외형 등에 대한 사물 센싱 데이터를 기준정보로 획득할 수 있다.
이때, 상기 센서 데이터 수신부(110)는, 상기 라이더 센서(10)에서 획득한 사물 센싱 데이터에 더하여, 차량에 구비된 카메라(20)에 의해 획득한 이미지를 기준정보로 함께 획득할 수 있다.
이와 같이, 상기 라이더 센서(10)에서 인식된 사물의 존부와 외형 등에 대한 사물 센싱 데이터와 상기 카메라(20)에서 획득한 이미지를 융합 데이터로 함께 획득함으로써, 상기 기준정보 획득모듈(100)에서 획득하는 기준정보의 신뢰도를 향상시킬 수 있다.
이러한 상기 센서 데이터 수신부(110)는 정밀 지도와 비교하기 위해 자율 주행 중 획득하는 사물 정보로서, 차량이 자율 주행 중인 도로에 설치되어 있는 신호등 정보와, 도로 노면 정보와, 차선 정보를 사물 센싱 데이터로 획득할 수 있다.
이때, 상기 신호등 정보는 신호등의 위치(자율 주행 중인 차량에서 인식되는 신호등의 상대적인 위치)와, 신호등의 유형(가로형 신호등인지 아니면 세로형 신호등인지 여부)과, 신호등에 구비된 구의 개수(이색등, 삼색등 또는 사색등 여부) 등을 사물 센싱 데이터로 획득할 수 있다.
또한, 상기 도로 노면 정보는 도로 노면의 위치(자율 주행 중인 차량에서 인식되는 도로 노면의 상대적인 위치)와, 도로의 모양(도로 노면에 표시된 마킹 종류)과, 도로에 표시된 화살표의 유형(직진, 직진-좌회전, 직진-우회전, 좌회전, 우회전, 우회전 금지 등) 등을 사물 센싱 데이터로 획득할 수 있다.
또한, 상기 차선 정보는 차선의 위치(자율 주행 중인 차량에서 인식되는 상대적인 위치)와, 차선의 색(흰색, 노란색, 파란색, 흰색-노란색의 겹선 등)과, 차선의 유형(실선, 점선, 겹선, 지그재그선 등) 등을 사물 센싱 데이터로 획득할 수 있다.
또한, 상기 기준정보 획득모듈(100)은, 주변 차량 등과의 데이터 통신을 위한 V2X(Vehicle to everything) 모듈(30)에 의해 주변에 있는 적어도 하나 이상의 다른 차량으로부터 수신하는 비교 지도 데이터를 기준정보로 획득하는 V2X 데이터 수신부(120)를 더 포함할 수 있다.
상기 V2X 데이터 수신부(120)는, 주행 중인 주변의 다른 차량으로부터 그 차량의 주행 기반이 되고 있는 해당 지역에 대한 비교 지도 데이터를 기준정보로 획득할 수 있다.
이와 같이 다른 차량으로부터 비교 지도 데이터를 기준정보로 획득할 경우, 차량의 주행 기반이 되는 정밀 지도와 비교를 위해 V2X 데이터로 수신한 비교 지도 데이터 상호간의 형식이 같으므로, 해당 지역에 대한 1:1 비교를 통하여 차이를 파악함으로써, 지도의 오류 여부를 보다 신속하고 정확하게 판단할 수 있다.
또한, 상기 오류 판단모듈(200)은, 상기 사물 센싱 데이터를 정밀 지도상의 해당 사물에 대한 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도에 오류가 있는 것으로 인식하는 센싱 데이터 비교부(210)를 포함할 수 있다.
상기 센싱 데이터 비교부(210)는, 상기 센서 데이터 수신부(110)에서 획득한 신호등 정보와 도론 노면 정보 및 차선 정보로 이루어진 사물 센싱 데이터를 정밀 지도에 포함되어 있는 신호등 정보와 도로 노면 정보 및 차선 정보와 각각 비교하여, 정밀 지도에서 각 사물에 대한 존재 여부, 위치, 유형 또는 모양 등의 데이터에 오류가 존재하는지 여부를 판단할 수 있다.
이때, 상기 사물 센싱 데이터와 비교하기 위한 정밀 지도상의 데이터로서, 신호등 정보와 관련하여 도로 중 신호등이 설치된 위치와 높이, 신호등의 설치 유형(가로형, 세로형 또는 보행자 신호등)과, 신호등에 구비된 구의 개수(이색등, 삼색등 또는 사색등 여부)와 신호등의 높이 등이 선택될 수 있다.
그에 따라, 상기 센싱 데이터 비교부(210)는, 상기 정밀 지도로부터 선택된 신호등 정보를 상기 사물 센싱 데이터로 획득한 신호등 정보와 비교하여, 신호등의 위치 및 높이, 신호등의 유형 및 신호등에 구비된 구의 개수 등의 일치 여부를 판단하여, 상호 불일치하는 정보가 있을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 판단할 수 있다.
또한, 상기 사물 센싱 데이터와 비교하기 위한 정밀 지도상의 데이터로서, 도로 노면 정보와 관련하여 도로 노면의 마킹 위치와 종류(횡단보도, 속도방지턱, 화살표, 숫자, 문자, 정지선 또는 버스정차대 여부)와, 화살표의 위치와 종류(직진, 직진-좌회전 또는 우회전 금지 등) 등이 선택될 수 있다.
상기 센싱 데이터 비교부(210)는, 상기 정밀 지도로부터 선택된 도로 노면 정보를 상기 사물 센싱 데이터로 획득한 도로 노면 정보와 비교하여, 도로 노면의 마킹 위치와 종류 및 화살표의 위치와 종류 등의 일치 여부를 판단하여, 상호 불일치하는 정보가 있을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 판단할 수 있다.
또한, 상기 사물 센싱 데이터와 비교하기 위한 정밀 지도상의 데이터로서, 차선 정보와 관련하여 차선의 위치와 색(흰색, 노란색, 파란색 또는 흰색-노란색 겹선 등)과, 차선의 종류(실선, 점선, 겹선 또는 지그재그 선 등) 등이 선택될 수 있다.
상기 센싱 데이터 비교부(210)는, 상기 정밀 지도로부터 선택된 차선 정보를 상기 사물 센싱 데이터로 획득한 차선 정보와 비교하여, 차선의 위치와 색 및 차선의 종류 등의 일치 여부를 판단하여, 상호 불일치하는 정보가 있을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 판단할 수 있다.
또한, 상기 오류 판단모듈(200)은, 상기 V2X 데이터 수신부에서 다른 차량으로부터 수신한 비교 지도 데이터를 정밀 지도상의 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 인식하는 V2X 데이터 비교부(220)를 더 포함할 수 있다.
이때, 상기 V2X 데이터 비교부(220)는, 같은 형식의 지도 데이터 상호간을 1:1 비교하여 정밀 지도상의 데이터에 오류가 있는지 여부를 판단하게 되므로, 높은 정확성을 갖고 빠른 판단이 이루어질 수 있다.
또한, 상기 오류 판단모듈(200)은, 정밀 지도에 오류가 있는지 여부를 판단하기 위해 비교하여야 하는 상기 정밀 지도상의 데이터와 비교 지도 데이터의 총량을 기준으로 비교대상이 되는 지도상의 영역을 결정하는 비교대상 특정부(230)를 더 포함할 수 있다.
상기 오류 판단모듈(200)은 정밀 지도를 기반으로 자율 주행 중인 차량에서 정밀 지도에 존재하는 오류로 인해 사고가 야기되는 것을 방지할 수 있도록, 정밀 지도상의 데이터에 오류가 있는지 여부를 실시간으로 파악할 수 있게 함이 바람직하다.
그로 인하여, 상기 센싱 데이터 비교부(210)에서는 상기 센서 데이터 수신부를 통하여 획득한 특정 사물(예를 들어, 신호등 정보, 도로 노면 정보 및 차선 정보 등)에 대한 사물 센싱 데이터를 정밀 지도상의 각 사물에 대한 데이터와 비교하므로 데이터 처리량이 크게 증가하지 않게 된다.
이에 반하여, 상기 V2X 데이터 비교부(220)에서는 주변 차량으로부터 해당 지역에 대한 비교 지도 데이터 자체를 수신하게 되므로, 수신한 데이터의 양이 많을 경우 수신한 모든 데이터의 처리에는 많은 시간이 소요될 수 있어, 자율 주행 중인 차량의 주행 경로 수정 등에 실시간으로 반영하기에는 적합하지 않을 수 있다.
그에 따라, 상기 비교대상 특정부(230)는, 비교하고자 하는 정밀 지도상의 데이터와 상기 V2X 데이터 수신부에서 수신한 비교 지도 데이터의 총량이 실시간 처리가 가능한 일정 기준의 양을 초과하지 않을 경우에는, 수신한 비교 지도 데이터 전체를 비교대상으로 결정하여 상기 정밀 지도상의 데이터와 비교하여 정밀 지도의 오류 여부를 판단할 수 있다.
또한, 상기 비교대상 특정부(230)는, 비교하고자 하는 정밀 지도상의 데이터와 상기 V2X 데이터 수신부에서 수신한 비교 지도 데이터의 총량이 실시간 처리가 가능한 일정 기준의 양을 초과할 경우에는, 자율 주행 중인 차량의 주행 경로와 겹쳐지는 영역만을 비교대상으로 결정하여, 차량의 주행 경로와 겹쳐지는 영역에 대한 비교 지도 데이터만을 해당 영역에 대한 정밀 지도상의 데이터와 비교하여 정밀 지도의 오류 여부를 판단할 수 있다.
그에 따라, 도 6에 도시된 바와 같이, 상기 비교대상 특정부(230)는, 자율 주행 중인 차량의 위치 및 주행 경로(도 6에서는 굵은 점선으로 표시함)와의 관련성이 낮은 비주행 영역(예를 들어, 차량이 이미 지나간 영역이나, 주행 경로에 속하지 않아 차량의 주행과 관련성이 낮은 영역)(도 6에서는 사각형이 박스로 표시함)을 제외하고, 차량의 이후 주행 경로 상에 위치하는 주행 영역(도 6에서는 굵은 점선을 따라 종 방향으로 연장되어 있는 영역)만을 비교대상으로 결정함으로써, 비주행 영역에 대한 데이터를 비교하지 않을 수 있다.
이와 같이 상기 비교대상 특정부(230)에 의해 비주행 영역에 대한 데이터의 비교 분석을 제외하고 주행 영역에 대한 데이터의 비교 분석에만 집중할 수 있게 함으로써, 데이터의 비교 분석에 소요되는 데이터 처리량과 처리시간을 줄여서 실시간 판단이 가능하게 할 수 있다.
또한, 상기 지도 오류 수정모듈(300)은, 상기 오류 판단모듈에서 정밀 지도에 오류가 있는 것으로 판단된 경우, 상기 기준정보 획득모듈에서 획득한 기준정보에 의해 정밀 지도상의 데이터를 수정하는 정밀 지도 수정부(320)를 포함할 수 있다.
이를 위하여 상기 정밀 지도 수정부(320)는, 오류가 있는 것으로 판단된 정밀 지도상의 데이터를 상기 기준정보 획득모듈에서 획득한 사물 센싱 데이터나 비교 지도 데이터로 교체하여 수정 저장할 수 있다.
그에 따라, 상기 정밀 지도는 교체된 사물 정보나 지도 정보가 올바르게 반영된 상태로 수정되어 저장됨으로써, 자율 주행 중인 현재 주행 경로 수정에 적용될 수 있을 뿐만 아니라, 이후 동일 지역에 대한 자율 주행시에는 올바른 정밀 지도에 기반한 자율 주행이 가능하게 되어 주행의 안전성을 향상시킬 수 있다.
또한, 상기 지도 오류 수정모듈(320)은, 상기 기준정보 획득모듈에서 획득한 사물 센싱 데이터와 비교 지도 데이터가 정밀 지도상의 데이터를 교체할 수 있을 정도로 신뢰성을 갖는 데이터인지 여부를 확인할 수 있도록, 데이터 수정을 위한 수정 기준의 충족 여부를 판단하는 수정여부 판단부(310)를 더 포함할 수 있다.
즉, 상기 기준정보 획득모듈에서 획득하는 사물 센싱 데이터는 자율 주행 중인 차량에 구비된 라이더 센서 등의 센싱값을 토대로 하고 있는바 센싱 오류의 가능성을 배제할 수 없다. 또한, 다른 차량으로부터 V2X 모듈을 통하여 획득한 비교 지도 데이터의 경우에도, 다른 차량에서 제공되는 지도 정보에 오류가 존재할 가능성을 배제할 수 없다.
그에 따라, 상기 수정여부 판단부(310)에서는, 라이더 센서나 V2X 모듈 중 어느 하나의 수단으로부터 획득한 사물 센싱 데이터나 비교 지도 데이터가 정밀 지도상의 데이터와 상이할 경우에는 일단 정밀 지도에 오류가 있는 것으로 판단은 하지만, 정밀 지도상의 데이터 교체를 위해서는 획득한 데이터의 신뢰성을 높일 수 있는 추가적인 데이터를 더 요구할 수 있다.
이를 위하여, 상기 수정여부 판단부(310)에서는, 상기 라이더 센서로부터 획득한 사물 센싱 데이터와 카메라로부터 획득한 이미지에서 획득한 데이터로 이루어진 융합 데이터와 정밀 지도상의 데이터가 상이하여 오류가 있는 것으로 판단될 경우에만 상기 융합 데이터로 정밀 지도상의 데이터를 수정하여 교체하도록 설정할 수 있다.
즉, 자율 주행 중이 차량에 구비된 라이더 센서 단독으로부터 획득한 사물 센싱 데이터가 정밀 지도상의 데이터와 상이하여 오류가 있는 것으로 판단될 경우에는, 오류가 있음은 인지하지만 교체를 위한 신뢰성을 확보할 수 없어 정밀 지도상의 데이터는 종전의 데이터로 유지할 수 있다.
또한, 상기 수정여부 판단부(310)에서는, 상기 V2X 모듈에 의해 자율 주행 중인 차량의 주위에 있는 2대 이상의 차량과 V2X 통신하면서 획득한 비교 지도 데이터가 모두 상기 정밀 지도상의 데이터와 상이하여 오류가 있는 것으로 판단될 경우에만 해당 비교 지도 데이터로 정밀 지도상의 데이터를 수정하여 교체하도록 설정할 수 있다.
즉, 자율 주행 중인 차량의 주위에 있는 1대의 차량으로부터 V2X 통신에 의해 획득한 비교 지도 데이터가 상기 정밀 지도상의 데이터와 상이하여 오류가 있는 것으로 판단될 경우에는, 오류가 있음은 인지하지만 교체를 위한 신뢰성을 확보할 수 없어 정밀 지도상의 데이터는 종전의 데이터로 유지할 수 있다.
또한, 상기 수정여부 판단부(310)에서는, 상기 센서 데이터 수신부에서 획득한 사물 센싱 데이터에 의해 정밀 지도상의 데이터를 수정한 결과와, 상기 V2X 데이터 수신부에서 획득한 비교 지도 데이터에 의해 정밀 지도상의 데이터의 오류를 수정하는 결과가 상호 일치할 경우에만 정밀 지도상의 데이터를 수정하여 교체하도록 설정할 수도 있다.
또한, 본 발명의 일 실시예에 따른 정밀 지도의 오류 판단 장치는, 상기 오류 판단모듈에서의 판단 결과 정밀 지도에 오류가 있는 것으로 판단되고, 해당 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우 자율 주행을 위한 주행 제어정보를 수정하는 주행 경로 제어모듈(400)을 더 포함할 수 있다.
즉, 상기 주행 경로 제어모듈(400)은, 정밀 지도의 오류 존재 영역이 주행 경로상에 있을 경우, 상기 오류 존재 영역을 주행하는 차량의 가감속 여부와 차선 변경여부를 포함하는 차량의 주행 제어정보를 오류가 수정된 내용에 따라 변경할 수 있다.
그에 따라, 상기 주행 경로 제어모듈(400)은, 도 2에 도시된 바와 같이, 정밀 지도에서는 주행 경로상에 신호등 정보가 없는 것으로 나타나지만, 상기 기준정보 획득모듈에 의해 획득한 사물 센싱 데이터(바람직하게는 라이더 센서와 카메라에 의해 인식되는 융합 데이터) 상에서는 주행 경로상에 신호등이 있는 것으로 판단될 경우, 이를 지도 오류로 인식하여 정밀 지도에 신호등 정보를 추가하고, 신호등에 표출되는 색상에 따라 정지선에 정차 또는 통과하도록 주행 제어정보를 변경할 수 있다.
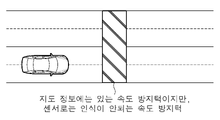
또한, 상기 주행 경로 제어모듈(400)은, 도 3에 도시된 바와 같이, 정밀 지도에서는 전방에 속도 방지턱이 존재하는 것으로 나타나지만, 상기 기준정보 획득모듈에 의해 획득한 사물 센싱 데이터(바람직하게는 라이더 센서와 카메라에 의해 인식되는 융합 데이터) 상에서는 전방에 속도 방지턱이 존재하지 않는 것으로 판단될 경우, 이를 지도 오류로 인식하여 정밀 지도에서 속도 방지턱을 제거하고, 그 위치에서 감속 없이 정속 주행을 유지하도록 주행 제어정보를 변경할 수 있다.
도 2 및 도 3에서는 사물 센싱 데이터에 의해 주행 제어정보를 변경하는 것을 일 예로 설명하였으나, V2X 데이터 수신부에서 수신한 비교 지도 데이터와의 비교를 통하여 주행 제어정보를 변경하여 현재의 자율 주행 제어에 적용할 수도 있음은 물론이다.
이때, 상기 주행 경로 제어모듈(400)은, 도 4에 도시된 바와 같이 정밀 지도상에 오류가 존재하는 것으로 판단되더라도, 오류가 있는 것으로 판단된 정밀 지도상의 영역이 자율 주행 중인 주행 경로와 무관한 영역인 경우에는, 주행 제어정보의 변경 없이 자율 주행 상태를 유지할 수 있음은 물론이다.
도 4에서는 자율 주행 중인 차량의 주행 경로를 굵은 점선으로 표시하고, 오류가 있는 것으로 판단된 정밀 지도상의 영역을 사각형의 박스로 표시하였다. 그에 따라, 상기 주행 경로 제어모듈(400)은 정밀 지도에 오류가 존재하더라도 주행 경로에는 영향을 미치지 않는 것으로 판단하여 현재의 자율 주행 상태를 제어하는 주행 제어정보를 유지하게 된다.
또한, 상기 주행 경로 제어모듈(400)은, 도 5에 도시된 바와 같이 정밀 지도상에 존재하는 오류에 의하여 차량이 현재의 주행 경로로 주행을 지속하기 어렵다고 판단될 경우, 현재 위치에서 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 우회경로를 생성한 후, 생성된 우회경로를 새로운 주행 경로로 수정하여 자율 주행을 지속시킬 수 있다.
도 5에서는 자율 주행 중인 차량의 현재 주행 경로를 굵은 점선으로 표시하고, 오류가 있는 것을 판단된 정밀 지도상의 영역을 사각형의 박스로 표시하였다. 상기 주행 경로 제어모듈(400)은 오류가 존재하는 영역이 주행 경로와 중복되는 것을 인지한 후, 해당 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 새로운 우회경로가 존재하는지 여부를 탐색한 후, 도 5에서 실선 형태의 화살표로 나타낸 바와 같은 우회경로를 생성하여 자율 주행을 지속시킬 수 있다.
또한, 상기 주행 경로 제어모듈(400)은, 정밀 지도상의 오류 존재 영역이 현재의 주행 경로와 중복되고, 목적지에 도달할 수 있는 우회경로를 생성하지 못하는 것으로 판단될 경우, 지속적인 자율 주행이 불가능하게 되므로 차량을 갓길 등에 긴급 정차시킨 후 운전자에게 차량의 제어권을 넘김으로써, 정밀 지도의 오류에도 불구하고 자율 주행을 강행하여 야기될 수 있는 사고의 발생을 방지할 수 있다.
다음으로 도 7 및 도 8을 참조하여 본 발명의 다른 실시예에 따른 정밀 지도의 오류 판단 방법을 설명한다.
도 7은 본 발명의 다른 실시예에 따른 정밀 지도의 오류 판단 방법의 구성도이고, 도 8은 본 발명의 다른 실시예에 따라 정밀 지도의 오류를 검증하고 주행 경로의 우회여부를 판단하는 플로우를 나타내는 순서도이다.
도 7을 참조하면, 본 발명의 다른 실시예에 따른 정밀 지도의 오류 판단 방법은, 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 자율 주행 중 실시간으로 획득하는 기준정보 획득단계(S100)와, 상기 정밀 지도상의 데이터를 기준정보와 비교하여 정밀 지도의 오류 여부를 판단하는 오류 판단단계(S200)와, 상기 기준 정보에 의한 정밀 지도상의 데이터 수정 여부를 결정하고 수정하는 지도 오류 수정단계(S300)를 포함할 수 있다.
상기 기준정보 획득단계(S100)는, 차량에 구비된 라이더 센서에서 인식되는 주변 사물의 존부, 위치 및 외형과 관련된 사물 센싱 데이터를 정밀 지도상의 데이터와 비교하기 위한 기준정보로 획득하는 센서 데이터 수신과정(S110)을 포함할 수 있다.
이때, 상기 센서 데이터 수신과정(S110)에서는, 상기 라이더 센서로부터 획득한 사물 센싱 데이터에 더하여, 차량에 구비된 카메라에 의해 획득한 이미지를 기준정보로 함께 획득할 수도 있다.
이와 같이, 상기 라이더 센서로부터 인식된 사물 센싱 데이터와 상기 카메라로부터 촬영된 이미지를 융합 데이터로 함께 획득하여, 정밀 지도상의 데이터와 비교하기 위한 기준정보를 획득함으로써, 상기 센서 데이터 수신과정에서 획득하는 기준정보의 신뢰도를 향상시킬 수 있다.
상기 센서 데이터 수신과정(S110)에서는, 차량이 자율 주행 중인 도로에 설치되어 있는 신호등의 존부와, 위치 및 유형 등을 포함하는 신호등 정보와, 도로 노면의 위치와, 도로 노면에 표시된 마킹 종류 및 도로 노면에 표시된 화살표의 유형 등을 포함하는 도로 노면 정보와, 차선의 위치와, 색 및 유형 등을 포함하는 차선 정보를 사물 센싱 데이터로 획득할 수 있다.
또한, 상기 기준정보 획득단계(S100)는, 주변 차량 등과의 데이터 통신을 위한 V2X(Vehicle to everything) 모듈에 의해 주변의 다른 차량으로부터 수신하는 비교 지도 데이터를 기준정보로 획득하는 V2X 데이터 수신과정(S120)을 더 포함할 수 있다.
상기 V2X 데이터 수신과정(S120)에서 다른 차량으로부터 획득한 비교 지도 데이터는 차량의 주행 기반이 되는 정밀 지도와 형식이 같으므로, 해당 지역에 대한 1:1 비교를 통하여 정밀 지도의 오류를 파악할 수 있어, 지도의 오류 여부를 보다 정밀하고 신속하게 판단할 수 있다.
또한, 상기 오류 판단단계(S200)는, 상기 사물 센싱 데이터를 정밀 지도상의 해당 사물에 대한 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도에 오류가 있는 것으로 판단하는 센싱 데이터 비교과정(S210)을 포함할 수 있다.
상기 센싱 데이터 비교과정(S210)에서는, 상기 사물 센싱 데이터와 비교하기 위한 정밀 지도상의 데이터로서, 신호등 정보와 관련하여 신호등의 위치와 높이, 설치 유형과, 신호등에 구비된 구의 개수 및 신호등의 높이 등이 선택될 수 있다.
이후, 상기 센싱 데이터 비교과정(S210)에서는, 선택된 정밀 지도상의 신호등 정보와 상기 사물 센싱 데이터 상의 신호등 정보를 상호 비교하여, 신호등의 존재여부, 위치, 유형, 신호등에 구비된 구의 개수 등의 일치 여부를 판단하고, 불일치하는 정보가 있을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 판단할 수 있다.
또한, 상기 센싱 데이터 비교과정(S210)에서, 도로 노면 정보와 차선 정보와 관련하여서도 정밀 지도상의 데이터를 선택하고, 이를 상기 사물 센싱 데이터와 비교하여 그 일치 여부를 판단함으로써, 불일치하는 정보가 있을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 판단할 수 있다.
또한, 상기 오류 판단단계(S200)는, 상기 비교 지도 데이터를 정밀 지도상의 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도에 오류가 있는 것으로 판단하는 V2X 데이터 비교과정(S220)을 더 포함할 수 있다.
이때, 상기 오류 판단단계(S200)는, 정밀 지도에 오류가 있는지 여부를 판단하기 위해 비교하여야 하는 상기 정밀 지도상의 데이터와 비교 지도 데이터 총량을 기준으로 비교대상이 되는 지도상의 영역을 결정하는 비교대상 특정과정(S230)을 더 포함할 수 있다.
상기 비교대상 특정과정(S230)에서는, 비교하고자 하는 정밀 지도상의 데이터와 상기 비교 지도 데이터의 총량이 실시간 처리가 가능한 일정 기준의 양을 초과하지 않을 경우에는 수신한 비교 지도 데이터 전체를 비교대상으로 결정할 수 있다.
또한, 상기 비교대상 특정과정(S230)에서는, 비교하고자 하는 정밀 지도 상의 데이터와 상기 비교 지도 데이터의 총량이 실시간 처리가 가능한 일정 기준의 양을 초과할 경우에는, 자율 주행 중인 차량의 주행 경로와 겹쳐지는 정밀 지도상의 영역만을 비교대상으로 결정할 수 있다.
이와 같이, 오류 판단을 위해 처리되어야 하는 비교 지도 데이터와 정밀 지도 데이터의 총량이 과도하게 많아지지 않게 함으로써, 실시간 오류 판단과 그 판단 결과에 따라 자율 주행을 위한 제어를 수행할 수 있다.
또한, 상기 지도 오류 수정단계(S300)는, 상기 오류 판단단계에서 정밀 지도에 오류가 있는 것으로 판단된 경우, 상기 기준정보 획득단계에서 획득한 기준정보에 의해 정밀 지도상의 데이터를 수정하는 정밀 지도 수정과정(S320)을 포함할 수 있다.
상기 정밀 지도 수정과정(S320)에서는, 오류가 있는 것으로 판단된 정밀 지도상의 데이터를 상기 센서 데이터 수신과정(S110)에서 획득한 사물 센싱 데이터나 상기 V2X 데이터 수신과정(S120)에서 획득한 비교 지도 데이터로 교체하여 수정 저장할 수 있다.
또한, 상기 지도 오류 수정단계(S300)는, 상기 정밀 지도 수정과정 이전에 상기 사물 센싱 데이터와 비교 지도 데이터가 정밀 지도상의 데이터를 교체할 수 있을 정도로 신뢰성을 갖는 데이터인지 여부를 확인할 수 있도록, 데이터 수정을 위한 수정 기준의 충족 여부를 판단하는 수정여부 판단과정(S310)을 더 포함할 수 있다.
상기 수정여부 판단과정(S310)에서는, 상기 라이더 센서로부터 획득한 사물 센싱 데이터와 카메라로부터 획득한 이미지에서 획득한 데이터로 이루어진 융합 데이터와 정밀 지도상의 데이터가 상이하여 오류가 있는 것으로 판단될 경우에만 상기 융합 데이터로 정밀 지도상의 데이터를 수정하여 교체하도록 설정할 수 있다. 그에 따라, 상기 카메라로부터 이미지를 획득하지 못하고 라이더 센서로부터만 사물 센싱 데이터를 획득한 경우에는, 오류가 있음은 인지하지만 정밀 지도상의 데이터 교체를 위한 신뢰성을 확보할 수 없는 것으로 판단하여 정밀 지도상의 데이터는 종전의 데이터로 유지하도록 설정할 수 있다.
또한, 상기 수정여부 판단과정(S310)에서는, 자율 주행 중인 차량의 주위에 있는 2대 이상의 차량과 V2X 통신하면서 획득한 비교 지도 데이터가 모두 상기 정밀 지도상의 데이터와 상이하여 오류가 있는 것으로 판단될 경우에만 해당 비교 지도 데이터로 정밀 지도상의 데이터를 수정하여 교체하도록 설정할 수도 있다. 그에 따라, 1대의 차량으로부터 V2X 통신에 의해 획득한 비교 지도 데이터가 상기 정밀 지도상의 데이터와 상이한 경우에는, 오류가 있음은 인지하지만 정밀 지도상의 데이터는 종전의 데이터로 유지하도록 설정할 수 있다.
또한, 상기 수정여부 판단과정(S310)에서는, 도 8에 도시된 바와 같이, 상기 사물 센싱 데이터에 의해 정밀 지도상의 데이터 오류를 수정한 결과와, 상기 비교 지도 데이터에 의해 정밀 지도상의 데이터의 오류를 수정하는 결과가 상호 일치할 경우에만 정밀 지도상의 데이터를 수정하여 교체하도록 설정할 수도 있다.
또한, 본 발명의 다른 일 실시예에 따른 정밀 지도의 오류 판단 방법은, 상기 오류 판단단계에서의 판단 결과 정밀 지도에 오류가 있는 것으로 판단되고, 해당 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우 자율 주행을 위한 주행 제어정보를 수정하는 주행 경로 제어단계(S400)를 더 포함할 수 있다.
그에 따라, 상기 주행 경로 제어단계(S400)에서는, 정밀 지도의 오류 존재 영역이 주행 경로상에 있을 경우, 상기 오류 존재 영역을 자율 주행하는 차량의 가감속 여부와 차선 변경여부를 포함하는 차량의 주행 제어정보를 오류가 수정된 내용에 따라 변경하도록 제어할 수 있다. 즉, 상기 주행 경로 제어단계(S400)에서는, 자율 주행하는 차량의 주행 제어정보를 상기 사물 센싱 데이터나 비교 대상 데이터에 기반하여 주행할 수 있도록 제어할 수 있다.
이때, 상기 주행 경로 제어단계(S400)에서는, 오류가 있는 것으로 판단된 정밀 지도상의 영역이 자율 주행 중인 주행 경로와 무관한 영역인 경우에는, 그 오류가 차량의 현재 주행에 영향을 미치지 않게 되므로 주행 제어정보의 변경 없이 자율 주행 상태를 유지할 수 있음은 물론이다.
또한, 상기 주행 경로 제어단계(S400)에서는, 정밀 지도상에 존재하는 오류에 의하여 차량이 현재 주행 경로로 주행을 지속하기 어렵다고 판단될 경우, 현재 위치에서 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 우회경로를 생성한 후, 생성된 우회경로를 새로운 주행 경로로 수정하여 자율 주행이 지속되도록 제어할 수 있다.
또한, 상기 주행 경로 제어단계(S400)에서는, 정밀 지도상의 오류 존재 영역이 현재의 주행 경로와 중복됨에도 불구하고, 목적지에 도달할 수 있는 우회경로를 생성하지 못하는 것으로 판단될 경우, 지속적인 자율 주행이 불가능하게 되므로 차량을 갓길 등에 긴급 정차시킨 후 운전자에게 차량의 제어권을 넘기도록 제어할 수 있다. 그에 따라, 정밀 지도의 오류에도 불구하고 자율 주행을 강행하여 야기될 수 있는 사고의 발생을 방지할 수 있다.
이상의 설명은 본 발명의 기술 사상을 예시적으로 설명한 것에 불과한 것으로서, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 다양한 수정 및 변형이 가능할 것이다.
따라서, 본 발명에 개시된 실시예들은 본 발명의 기술 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 이러한 실시예에 의하여 본 발명의 기술 사상의 범위가 한정되는 것은 아니다. 본 발명의 보호 범위는 아래의 청구범위에 의하여 해석되어야 하며, 그와 동등한 범위 내에 있는 모든 기술 사상은 본 발명의 권리범위에 포함되는 것으로 해석되어야 할 것이다.
10 : 라이더 센서
20 : 카메라
30 : V2X 모듈
100 : 기준정보 획득모듈 110 : 센서 데이터 수신부
120 : V2X 데이터 수신부
200 : 오류 판단모듈 210 : 센싱 데이터 비교부
220 : V2X 데이터 비교부
300 : 지도 오류 수정모듈 310 : 수정 여부 판단부
320 : 정밀 지도 수정부
400 : 주행 경로 제어모듈
30 : V2X 모듈
100 : 기준정보 획득모듈 110 : 센서 데이터 수신부
120 : V2X 데이터 수신부
200 : 오류 판단모듈 210 : 센싱 데이터 비교부
220 : V2X 데이터 비교부
300 : 지도 오류 수정모듈 310 : 수정 여부 판단부
320 : 정밀 지도 수정부
400 : 주행 경로 제어모듈
Claims (21)
- 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 자율 주행 중 실시간으로 획득하는 기준정보 획득모듈;
상기 정밀 지도상의 데이터를 기준정보와 비교하여 정밀 지도의 오류 여부를 판단하는 오류 판단모듈; 및
상기 기준정보에 의한 정밀 지도상의 데이터 수정 여부를 결정하고 수정하는 지도 오류 수정모듈;
을 포함하는 정밀 지도의 오류 판단 장치. - 청구항 1에 있어서,
상기 기준정보 획득모듈은,
자율 주행 중인 차량에 구비된 라이더 센서에 의해 정밀 지도상의 데이터와 비교하기 위한 주변 사물에 대한 사물 센싱 데이터를 기준정보로 획득하는 센서 데이터 수신부;
를 포함하는 정밀 지도의 오류 판단 장치. - 청구항 2에 있어서,
상기 센서 데이터 수신부는,
상기 라이더 센서에서 획득한 사물 센싱 데이터에 더하여, 차량에 구비된 카메라에 의해 획득한 이미지를 기준정보로 함께 획득하는 것을 특징으로 하는 정밀 지도의 오류 판단 장치. - 청구항 1에 있어서,
상기 기준정보 획득모듈은,
주변 차량과의 데이터 통신을 위한 V2X(Vehicle to everything) 모듈에 의해 적어도 하나 이상의 다른 차량으로부터 수신하는 비교 지도 데이터를 기준정보로 획득하는 V2X 데이터 수신부;
를 더 포함하는 정밀 지도의 오류 판단 장치. - 청구항 2에 있어서,
상기 오류 판단모듈은, 상기 기준정보를 정밀 지도상의 해당 사물에 대한 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도에 오류가 있는 것으로 인식하는 센싱 데이터 비교부;
를 포함하는 정밀 지도의 오류 판단 장치. - 청구항 5에 있어서,
상기 센싱 데이터 비교부는,
상기 센서 데이터 수신부에서 획득한 신호등 정보와 도론 노면 정보 및 차선 정보로 이루어진 사물 센싱 데이터를 정밀 지도에 포함되어 있는 신호등 정보와 도로 노면 정보 및 차선 정보와 각각 비교하여, 정밀 지도에서 각 사물에 대한 존재 여부, 위치, 유형 또는 모양 중 적어도 하나의 데이터에 오류가 존재하는지 여부를 판단하는 것을 특징으로 하는 정밀 지도의 오류 판단 장치. - 청구항 4에 있어서,
상기 오류 판단모듈은,
상기 V2X 데이터 수신부에서 다른 차량으로부터 수신한 비교 지도 데이터를 정밀 지도상의 데이터와 비교하여 두 데이터 상호간의 일치 여부를 판단하고, 일치하지 않을 경우 정밀 지도상의 데이터에 오류가 있는 것으로 인식하는 V2X 데이터 비교부;
를 더 포함하는 정밀 지도의 오류 판단 장치. - 청구항 7에 있어서,
상기 오류 판단모듈은,
비교하고자 하는 정밀 지도상의 데이터와 상기 V2X 데이터 수신부에서 수신한 비교 지도 데이터의 총량이 실시간 처리가 가능한 일정 기준의 양을 초과할 경우, 자율 주행 중인 차량의 주행 경로와 겹쳐지는 영역만을 비교대상으로 결정하여 정밀 지도의 오류 여부를 판단하는 비교대상 특정부;
를 더 포함하는 정밀 지도의 오류 판단 장치. - 청구항 2에 있어서,
상기 지도 오류 수정모듈은,
상기 오류 판단모듈에서 정밀 지도에 오류가 있는 것으로 판단된 경우, 상기 기준정보 획득모듈에서 획득한 기준정보에 의해 정밀 지도상의 데이터를 수정하는 정밀 지도 수정부;
를 포함하는 정밀 지도의 오류 판단 장치. - 청구항 9에 있어서,
상기 지도 오류 수정모듈은,
상기 기준정보 획득모듈에서 획득한 사물 센싱 데이터와 비교 지도 데이터가 정밀 지도상의 데이터를 교체할 수 있을 정도로 신뢰성을 갖는 데이터인지 여부를 확인할 수 있도록, 데이터 수정을 위한 수정 기준의 충족 여부를 판단하는 수정여부 판단부;
를 더 포함하는 정밀 지도의 오류 판단 장치. - 청구항 2에 있어서,
상기 오류 판단모듈에서의 판단 결과 정밀 지도에 오류가 있는 것으로 판단되고, 해당 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우, 자율 주행을 위한 주행 제어정보를 수정하는 주행 경로 제어모듈;
을 더 포함하는 정밀 지도의 오류 판단 장치. - 청구항 11에 있어서,
상기 주행 경로 제어모듈은,
정밀 지도의 오류 존재 영역이 주행 경로상에 있을 경우, 상기 오류 존재 영역을 주행하는 차량의 가감속 여부와 차선 변경여부를 포함하는 차량의 주행 제어정보를 오류가 수정된 내용에 따라 변경하는 것을 특징으로 하는 정밀 지도의 오류 판단 장치. - 청구항 11에 있어서,
상기 주행 경로 제어모듈은,
정밀 지도상에 존재하는 오류에 의하여 차량이 현재의 주행 경로로 주행을 지속하기 어렵다고 판단될 경우, 현재 위치에서 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 우회경로를 생성한 후, 생성된 우회경로를 새로운 주행 경로로 수정하여 자율 주행을 지속하는 것을 특징으로 하는 정밀 지도의 오류 판단 장치. - 청구항 11에 있어서,
상기 주행 경로 제어모듈은,
정밀 지도상의 오류 존재 영역이 현재의 주행 경로와 중복되고, 목적지에 도달할 수 있는 우회경로를 생성하지 못하는 것으로 판단될 경우, 차량을 긴급 정차시킨 후 운전자에게 차량의 제어권을 넘기도록 제어하는 것을 특징으로 하는 정밀 지도의 오류 판단 장치. - 자율 주행의 경로를 안내하는 정밀 지도와 비교하기 위한 기준정보를 자율 주행 중 실시간으로 획득하는 기준정보 획득단계;
상기 정밀 지도상의 데이터를 기준정보와 비교하여 정밀 지도의 오류 여부를 판단하는 오류 판단단계; 및
상기 기준 정보에 의한 정밀 지도상의 데이터 수정 여부를 결정하고 수정하는 지도 오류 수정단계;
를 포함하는 정밀 지도의 오류 판단 방법. - 청구항 15에 있어서,
상기 기준정보 획득단계는,
차량에 구비된 라이더 센서에서 인식되는 주변 사물의 존부, 위치 및 외형과 관련된 사물 센싱 데이터를 정밀 지도상의 데이터와 비교하기 위한 기준정보로 획득하는 센서 데이터 수신과정;
을 포함하는 정밀 지도의 오류 판단 방법. - 청구항 15에 있어서,
상기 기준정보 획득단계는,
주변 차량과의 데이터 통신을 위한 V2X(Vehicle to everything) 모듈에 의해 주변의 다른 차량으로부터 수신하는 비교 지도 데이터를 기준정보로 획득하는 V2X 데이터 수신과정;
을 포함하는 정밀 지도의 오류 판단 방법. - 청구항 15에 있어서,
상기 오류 판단단계에서의 판단 결과 정밀 지도에 오류가 있는 것으로 판단되고, 해당 오류 부분이 자율 주행을 위한 주행 경로상에 있을 경우 자율 주행을 위한 주행 제어정보를 수정하는 주행 경로 제어단계;
를 더 포함하는 정밀 지도의 오류 판단 방법. - 청구항 18에 있어서,
상기 주행 경로 제어단계는,
정밀 지도의 오류 존재 영역이 주행 경로상에 있을 경우, 상기 오류 존재 영역을 자율 주행하는 차량의 가감속 여부와 차선 변경여부를 포함하는 차량의 주행 제어정보를 오류가 수정된 내용에 따라 변경하도록 제어하는 것을 특징으로 하는 정밀 지도의 오류 판단 방법. - 청구항 18에 있어서,
상기 주행 경로 제어단계는,
정밀 지도상에 존재하는 오류에 의하여 차량이 현재 주행 경로로 주행을 지속하기 어렵다고 판단될 경우, 현재 위치에서 오류 존재 영역을 회피하여 목적지에 도달할 수 있는 우회경로를 생성한 후, 생성된 우회경로를 새로운 주행 경로로 수정하여 자율 주행이 지속되도록 제어하는 것을 특징으로 하는 정밀 지도의 오류 판단 방법. - 청구항 18에 있어서,
상기 주행 경로 제어단계는,
정밀 지도상의 오류 존재 영역이 현재의 주행 경로와 중복됨에도 불구하고, 목적지에 도달할 수 있는 우회경로를 생성하지 못하는 것으로 판단될 경우, 차량을 긴급 정차시킨 후 운전자에게 차량의 제어권을 넘기도록 제어하는 것을 특징으로 하는 정밀 지도의 오류 판단 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200154947A KR20220068043A (ko) | 2020-11-18 | 2020-11-18 | 정밀 지도의 오류 판단 장치 및 방법 |
| US17/499,119 US20220155081A1 (en) | 2020-11-18 | 2021-10-12 | Apparatus and method for determining error of precise map |
| CN202111287009.1A CN114543821A (zh) | 2020-11-18 | 2021-11-02 | 用于确定精确地图的错误的装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200154947A KR20220068043A (ko) | 2020-11-18 | 2020-11-18 | 정밀 지도의 오류 판단 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220068043A true KR20220068043A (ko) | 2022-05-25 |
Family
ID=81586564
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200154947A KR20220068043A (ko) | 2020-11-18 | 2020-11-18 | 정밀 지도의 오류 판단 장치 및 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220155081A1 (ko) |
| KR (1) | KR20220068043A (ko) |
| CN (1) | CN114543821A (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220105777A (ko) * | 2021-01-21 | 2022-07-28 | 현대자동차주식회사 | 주행 정보 기반 지도 생성 장치 및 방법 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106776996B (zh) * | 2016-12-02 | 2018-09-07 | 百度在线网络技术(北京)有限公司 | 用于测试高精度地图的准确性的方法和装置 |
| EP3563265B1 (en) * | 2016-12-30 | 2021-06-02 | DeepMap Inc. | High definition map updates |
| US20190137287A1 (en) * | 2017-06-27 | 2019-05-09 | drive.ai Inc. | Method for detecting and managing changes along road surfaces for autonomous vehicles |
| CN108319655B (zh) * | 2017-12-29 | 2021-05-07 | 百度在线网络技术(北京)有限公司 | 用于生成栅格地图的方法和装置 |
| US10684131B2 (en) * | 2018-01-04 | 2020-06-16 | Wipro Limited | Method and system for generating and updating vehicle navigation maps with features of navigation paths |
| WO2020140164A1 (en) * | 2019-01-03 | 2020-07-09 | Beijing Didi Infinity Technology And Development Co., Ltd. | Systems and methods for updating a high-definition map |
| US11593344B2 (en) * | 2019-07-02 | 2023-02-28 | Nvidia Corporation | Updating high definition maps based on age of maps |
| WO2021041402A1 (en) * | 2019-08-26 | 2021-03-04 | Mobileye Vision Technologies Ltd. | Systems and methods for vehicle navigation |
-
2020
- 2020-11-18 KR KR1020200154947A patent/KR20220068043A/ko unknown
-
2021
- 2021-10-12 US US17/499,119 patent/US20220155081A1/en active Pending
- 2021-11-02 CN CN202111287009.1A patent/CN114543821A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN114543821A (zh) | 2022-05-27 |
| US20220155081A1 (en) | 2022-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8560220B2 (en) | Method and apparatus for determining a plausible lane for guiding a vehicle and an automobile | |
| JP2019219986A (ja) | 自動運転支援システム | |
| KR20190133623A (ko) | 적어도 하나의 자동차의 가이드를 지원하기 위한 방법, 보조 시스템 및 자동차 | |
| US9470537B2 (en) | Accurate position determination near exit lanes | |
| KR20170097435A (ko) | 자율주행 시스템에서의 교차로 우회전 판단 장치 및 그 방법 | |
| US20190184988A1 (en) | Lane keeping and following system | |
| US20110010046A1 (en) | Object detection device | |
| JP7260064B2 (ja) | 自車位置推定装置、走行位置推定方法 | |
| CN114613129A (zh) | 用于判断交通信号灯状态的方法、程序产品和系统 | |
| JP6805704B2 (ja) | 経路選択方法及び経路選択装置 | |
| JP2017142151A (ja) | 運転支援システム及びデータ構造 | |
| KR101281499B1 (ko) | 자동차 자동 운행 시스템 | |
| US11648960B2 (en) | Control method and control device for controlling autonomously driven vehicle | |
| KR20180068262A (ko) | 교통신호 인식방법 및 시스템 | |
| US10665103B2 (en) | Vehicle periphery information verification device and method | |
| KR20220068043A (ko) | 정밀 지도의 오류 판단 장치 및 방법 | |
| KR20210100241A (ko) | 내비게이션 연동을 이용한 차선 표시용 램프 시스템 및 이에 의한 차선 표시 방법 | |
| US11490234B2 (en) | Cooperative ADAS and cooperative safety systems and methods using V2X communications | |
| US20230349719A1 (en) | Map generation apparatus, map generation program and on-vehicle equipment | |
| KR20190064228A (ko) | 이미지 센싱을 이용한 차선 정보 제공 장치, 차선 정보 제공 방법 및 이를 이용한 차량 제어 방법 | |
| CN112365730A (zh) | 自动驾驶方法、装置、设备、存储介质以及车辆 | |
| JP7258094B2 (ja) | 目標経路生成装置および目標経路生成方法 | |
| US20210024082A1 (en) | Traffic signal interpretation system and vehicle control system | |
| KR102395844B1 (ko) | 차량의 근접에 따른 군집 합류 안내 방법, 이를 수행하는 장치 | |
| JP7255706B2 (ja) | 信号機認識方法及び信号機認識装置 |