KR20210046044A - 적어도 하나의 물체의 위치를 결정하기 위한 측정 헤드 - Google Patents
적어도 하나의 물체의 위치를 결정하기 위한 측정 헤드 Download PDFInfo
- Publication number
- KR20210046044A KR20210046044A KR1020217008098A KR20217008098A KR20210046044A KR 20210046044 A KR20210046044 A KR 20210046044A KR 1020217008098 A KR1020217008098 A KR 1020217008098A KR 20217008098 A KR20217008098 A KR 20217008098A KR 20210046044 A KR20210046044 A KR 20210046044A
- Authority
- KR
- South Korea
- Prior art keywords
- measuring head
- fiber
- optical
- light receiving
- light
- Prior art date
Links
- 239000000835 fiber Substances 0.000 claims abstract description 632
- 230000005540 biological transmission Effects 0.000 claims abstract description 145
- 230000004044 response Effects 0.000 claims abstract description 27
- 230000003287 optical effect Effects 0.000 claims description 513
- 238000005286 illumination Methods 0.000 claims description 183
- 238000005259 measurement Methods 0.000 claims description 92
- 238000011156 evaluation Methods 0.000 claims description 79
- 238000000034 method Methods 0.000 claims description 47
- 125000006850 spacer group Chemical group 0.000 claims description 40
- 230000001902 propagating effect Effects 0.000 claims description 37
- 238000005253 cladding Methods 0.000 claims description 32
- 239000007787 solid Substances 0.000 claims description 17
- 238000004519 manufacturing process Methods 0.000 claims description 11
- 238000005516 engineering process Methods 0.000 claims description 8
- 238000013500 data storage Methods 0.000 claims description 6
- 238000010146 3D printing Methods 0.000 claims description 3
- 238000003908 quality control method Methods 0.000 claims description 3
- 230000003190 augmentative effect Effects 0.000 claims description 2
- 210000003128 head Anatomy 0.000 description 211
- 239000011159 matrix material Substances 0.000 description 59
- 239000013307 optical fiber Substances 0.000 description 57
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 21
- 230000003595 spectral effect Effects 0.000 description 21
- 210000000887 face Anatomy 0.000 description 16
- 239000000463 material Substances 0.000 description 15
- 238000002834 transmittance Methods 0.000 description 11
- 230000007423 decrease Effects 0.000 description 10
- 239000004065 semiconductor Substances 0.000 description 10
- 239000000377 silicon dioxide Substances 0.000 description 10
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 9
- 238000001444 catalytic combustion detection Methods 0.000 description 9
- 230000001419 dependent effect Effects 0.000 description 9
- 230000010354 integration Effects 0.000 description 9
- 229910052710 silicon Inorganic materials 0.000 description 9
- 239000010703 silicon Substances 0.000 description 9
- 230000008859 change Effects 0.000 description 8
- 238000012935 Averaging Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 7
- 229920000642 polymer Polymers 0.000 description 7
- 239000010980 sapphire Substances 0.000 description 7
- 229910052594 sapphire Inorganic materials 0.000 description 7
- 230000000694 effects Effects 0.000 description 6
- 238000010521 absorption reaction Methods 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 238000013461 design Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000035945 sensitivity Effects 0.000 description 5
- 238000000926 separation method Methods 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000000354 decomposition reaction Methods 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000005670 electromagnetic radiation Effects 0.000 description 4
- 230000007613 environmental effect Effects 0.000 description 4
- 238000001914 filtration Methods 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 4
- 230000001976 improved effect Effects 0.000 description 4
- 230000035939 shock Effects 0.000 description 4
- 239000011343 solid material Substances 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 230000005684 electric field Effects 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- -1 polyoxymethylene Polymers 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000001429 visible spectrum Methods 0.000 description 3
- 229910004261 CaF 2 Inorganic materials 0.000 description 2
- 229910000530 Gallium indium arsenide Inorganic materials 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- 239000004809 Teflon Substances 0.000 description 2
- 229920006362 Teflon® Polymers 0.000 description 2
- 239000011358 absorbing material Substances 0.000 description 2
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 2
- 229910021417 amorphous silicon Inorganic materials 0.000 description 2
- 229910052799 carbon Inorganic materials 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 229910003460 diamond Inorganic materials 0.000 description 2
- 239000010432 diamond Substances 0.000 description 2
- 238000005485 electric heating Methods 0.000 description 2
- UHESRSKEBRADOO-UHFFFAOYSA-N ethyl carbamate;prop-2-enoic acid Chemical compound OC(=O)C=C.CCOC(N)=O UHESRSKEBRADOO-UHFFFAOYSA-N 0.000 description 2
- 239000005329 float glass Substances 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000005693 optoelectronics Effects 0.000 description 2
- 239000011368 organic material Substances 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 239000011800 void material Substances 0.000 description 2
- JWKJOADJHWZCLL-UHFFFAOYSA-N 1,2,3,4,5,5,6,6,6-nonafluoro-1-(1,2,3,4,5,5,6,6,6-nonafluorohexa-1,3-dienoxy)hexa-1,3-diene Chemical compound FC(OC(F)=C(F)C(F)=C(F)C(F)(F)C(F)(F)F)=C(F)C(F)=C(F)C(F)(F)C(F)(F)F JWKJOADJHWZCLL-UHFFFAOYSA-N 0.000 description 1
- 229910000673 Indium arsenide Inorganic materials 0.000 description 1
- 229910000661 Mercury cadmium telluride Inorganic materials 0.000 description 1
- 229930040373 Paraformaldehyde Natural products 0.000 description 1
- 239000004793 Polystyrene Substances 0.000 description 1
- 239000005354 aluminosilicate glass Substances 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000003705 background correction Methods 0.000 description 1
- 238000010009 beating Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 229910021418 black silicon Inorganic materials 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000005387 chalcogenide glass Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000010892 electric spark Methods 0.000 description 1
- 239000012777 electrically insulating material Substances 0.000 description 1
- 230000003203 everyday effect Effects 0.000 description 1
- 239000002657 fibrous material Substances 0.000 description 1
- 239000005383 fluoride glass Substances 0.000 description 1
- 229920002313 fluoropolymer Polymers 0.000 description 1
- 239000004811 fluoropolymer Substances 0.000 description 1
- 238000007526 fusion splicing Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- WPYVAWXEWQSOGY-UHFFFAOYSA-N indium antimonide Chemical compound [Sb]#[In] WPYVAWXEWQSOGY-UHFFFAOYSA-N 0.000 description 1
- RPQDHPTXJYYUPQ-UHFFFAOYSA-N indium arsenide Chemical compound [In]#[As] RPQDHPTXJYYUPQ-UHFFFAOYSA-N 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 235000020061 kirsch Nutrition 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000003278 mimic effect Effects 0.000 description 1
- 239000005365 phosphate glass Substances 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 1
- 239000004926 polymethyl methacrylate Substances 0.000 description 1
- 229920006324 polyoxymethylene Polymers 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 229920002223 polystyrene Polymers 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 229910052704 radon Inorganic materials 0.000 description 1
- SYUHGPGVQRZVTB-UHFFFAOYSA-N radon atom Chemical compound [Rn] SYUHGPGVQRZVTB-UHFFFAOYSA-N 0.000 description 1
- 229910052761 rare earth metal Inorganic materials 0.000 description 1
- 150000002910 rare earth metals Chemical class 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 239000005368 silicate glass Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000005382 thermal cycling Methods 0.000 description 1
- 238000002211 ultraviolet spectrum Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images





































































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4818—Constructional features, e.g. arrangements of optical elements using optical fibres
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/103—Scanning systems having movable or deformable optical fibres, light guides or waveguides as scanning elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/02—Optical fibres with cladding with or without a coating
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/36—Mechanical coupling means
- G02B6/3616—Holders, macro size fixtures for mechanically holding or positioning fibres, e.g. on an optical bench
- G02B6/3624—Fibre head, e.g. fibre probe termination
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optics & Photonics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Abstract
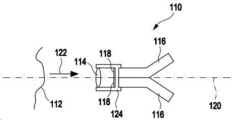
적어도 하나의 물체(112)의 위치를 결정하기 위한 측정 헤드(110)는, - 적어도 하나의 전송 장치(114) ― 상기 전송 장치(114)는 물체(112)로부터 측정 헤드(110)로 전파하는 적어도 하나의 입사 광 빔(122)에 응답하여 적어도 하나의 초점 길이를 가짐 ―; 및 - 적어도 2개의 광 수신 섬유(116) ― 상기 광 수신 섬유(116) 및/또는 전송 장치(114) 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 가지며, 여기서 k는 열전도율이고, εr은 비유전율임 ―를 포함한다.
Description
본 발명은 적어도 하나의 물체의 위치를 결정하기 위한 측정 헤드, 키트 및 적어도 하나의 물체의 위치를 결정하기 위한 방법에 관한 것이다. 본 발명은 또한 검출기 장치의 다양한 용도에 관한 것이다. 본 발명에 따른 장치, 시스템, 방법 및 용도는 구체적으로 예를 들어 일상 생활, 게임, 교통 기술, 생산 기술, 보안 기술, 예술, 서류 또는 기술적 목적을 위한 디지털 사진 또는 비디오 사진과 같은 사진, 의료 기술 또는 과학 분야의 다양한 영역에서 사용될 수 있다. 또한, 본 발명은 구체적으로 하나 이상의 물체를 스캔하고 및/또는 예를 들어 건축, 도량형, 고고학, 예술, 의학, 공학 또는 제조의 분야에서 물체 또는 풍경의 깊이 프로파일을 생성하는 것과 같이 풍경을 스캔하기 위해 사용될 수 있다. 그러나, 다른 응용 프로그램도 가능하다.
광 섬유 거리 센서는 일반적으로 종래 기술로부터 공지되어 있다. 이러한 장치를 사용하면 측정 전자장치에서 거리 측정 위치를 분리할 수 있다. 따라서, 가혹한 화학 환경, 고온 충격, 강한 전기장과 같은 거친 환경이나, 또는 진동, 충격, 구부러짐, 스트레칭, 비팅(beating) 또는 다른 충격과 같은 강한 기계적 충격이 있는 환경에서 측정이 가능하다. 광 섬유 센서는 예를 들어 2018년 3월 15일에 출원된 국제출원 제 PCT/EP2018/056545 호에 설명되어 있으며, 그 전체 내용은 여기에 참조로 원용된다.
이러한 광 섬유 거리 센서는 특정 응용이 아닌 상이한 환경과 같은 여러 응용에 대해 신뢰할 수 있는 측정이 가능한 것이 바람직하다. 그러나, 공지된 광 섬유 거리 센서는 종종 너무 비싸거나 열악한 환경에서 유용하지 않은 재료와 광학장치로 구성되어, 측정 신뢰성이 저하되거나 또는 재료 자체가 악화될 수 있다. 또한, 공지된 광 섬유 거리 센서는 온도 또는 전기장과 같은 환경 조건이 변할 때 측정 오류를 유발하여 열악하고 다양한 환경 조건에 적합하지 않게 만드는 중요한 재료 및 광학장치이다.
미국 특허 제 9,593,941 B2 호는 간극 감지 시스템과 주파수 식별을 사용하는 방법을 개시하고 있다. 간극 감지 시스템은 섬유 광 센서를 사용하여 타겟 영역을 통과하는 타겟과, 타겟이 회전하는 하우징 또는 케이싱의 벽 사이의 거리를 결정한다. 간극 감지 시스템은 조명 및 비조명 영역을 타겟 영역으로 다중의 교호하고 발산하는 것을 포함해서 라이트 필드를 투사하고, 타겟이 라이트 필드를 통할 때 타겟의 반사된 광을 수집하고, 수집된 반사 광에 기초하여 진동 신호를 생성하고, 신호의 주요 주파수를 식별하고, 주요 주파수를 사용하여 거리를 결정한다.
미국 특허 공개 제 US 2018/084981 A1 호는 도광 부품 및 스페이서에 의해 둘러싸이는 포커싱 렌즈를 포함하는 스펙트럼 인코딩된 엔도스코프를 위한 장치, 방법 및 시스템을 개시하고 있으며, 여기에서 포커싱 렌즈는 실질적으로 형상이 볼 또는 반원이고, 포커싱 렌즈의 굴절률은 스페이서의 굴절률보다 크다.
국제 공개 팜플렛 제 WO 2018/091640 A2 호는 적어도 하나의 물체의 위치를 결정하기 위한 검출기를 개시하고 있다. 검출기는, - 적어도 하나의 전송 장치 ― 전송 장치는 물체로부터 검출기로 전파되는 적어도 하나의 입사 광 빔에 응답하여 적어도 하나의 초점 거리를 가짐 ―; - 적어도 2개의 광학 센서 ― 각 광학 센서는 적어도 하나의 감광 영역을 가지며, 각 광학 센서는 광 빔에 의한 각 감광 영역의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 설계됨 ―; - 센서 신호로부터 몫 신호(Q)를 평가함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하도록 구성되는 적어도 하나의 평가 장치를 포함한다. 검출기는 물체 평면의 물체 크기와 무관한 하나 이상의 측정 범위에서 물체의 세로 좌표(z)를 결정하도록 구성된다
따라서, 본 발명의 목적은 공지된 장치 및 방법의 전술한 기술적 과제에 직면한 장치 및 방법을 제공하는 것이다. 특히, 본 발명의 목적은 가혹한 환경에서도, 바람직하게 기술적인 노력이 적고 기술적인 자원과 비용면에서 낮은 요구 사항으로 공간에서 물체의 위치를 안정적으로 결정할 수 있는 장치 및 방법을 제공하는 것이다.
이러한 문제는 독립 청구항의 특징을 가진 발명에 의해 해결된다. 개별적으로 또는 조합하여 실현될 수 있는 본 발명의 유리한 개발은 종속 청구항 및/또는 하기의 명세서 및 상세한 실시예에 제시된다.
하기에서 사용되는 바와 같이, 용어 "갖다", "포함하다" 또는 "구비하다" 또는 이들의 임의의 문법적 어미변화는 비배타적인 방식으로 사용된다. 따라서, 이들 용어는, 이들 용어에 의해 도입된 특징 이외에, 이러한 문맥에서 설명된 엔티티(entity)에 다른 특징이 존재하지 않는 상황과, 하나 이상의 다른 특징이 존재하는 상황 모두를 지칭할 수 있다. 일 예로서, 표현 "A가 B를 갖는다", "A가 B를 포함한다" 및 "A가 B를 구비한다"는 B 이외에 다른 요소가 A에 존재하지 않는 상황(즉, A가 단독으로 또는 배타적으로 B로 구성되는 상황)과, B 이외에 하나 이상의 다른 요소, 예컨대 요소 C, 요소 C 및 D, 또는 또 다른 요소가 엔티티 A에 존재하는 상황을 모두 지칭할 수 있다.
또한, 특징 또는 요소가 한번 또는 한번 초과로 존재할 수 있음을 나타내는 용어 "적어도 하나", "하나 이상" 또는 유사한 표현은 전형적으로 각각의 특징 또는 요소를 도입할 때 한번만 사용된다는 것에 주목해야 된다. 하기에서는, 대부분의 경우에, 각각의 특징 또는 요소를 언급할 때, 각각의 특징 또는 요소가 한번 또는 한번 초과로 존재할 수 있다는 사실에도 불구하고, 표현 "적어도 하나" 또는 "하나 이상"은 반복되지 않을 것이다.
또한, 하기에서 사용되는 바와 같이, 용어 "바람직하게", "보다 바람직하게", "특히", "보다 특별하게", "구체적으로", "보다 구체적으로" 또는 유사한 용어는 대체가능성을 제한하지 않고, 선택적인 특징과 함께 사용된다. 따라서, 이들 용어에 의해 도입된 특징은 선택적인 특징이며, 어떤 방식으로도 청구범위의 범위를 제한하는 것으로 의도되지 않는다. 당업자가 인식하는 바와 같이, 본 발명은 대체 특징을 사용하여 수행될 수 있다. 유사하게, "본 발명의 실시예에서" 또는 유사한 표현에 의해 도입된 특징은, 본 발명의 대안적인 실시예에 관한 어떠한 제한도 없이, 본 발명의 범위에 관한 어떠한 제한도 없이, 그리고 그러한 방식으로 도입된 특징을 본 발명의 다른 선택적 또는 비선택적인 특징과 결합할 가능성에 관한 어떠한 제한도 없이, 선택적인 특징인 것으로 의도된다.
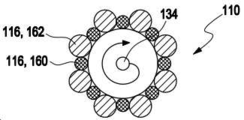
본 발명의 제 1 양태에서, 적어도 하나의 물체의 위치를 결정하기 위한 측정 헤드가 개시된다. 본 명세서에서 사용되는 용어 "측정 헤드"는 물체로부터 적어도 하나의 광 빔을 수신하도록 구성된 적어도 하나의 측정 수단을 의미한다. 측정 헤드는 아래에서 상세히 설명되는 바와 같이 적어도 2개의 광학 측정 섬유와 같은 적어도 2개의 광 수신 섬유와 같은 측정 헤드의 추가 구성요소를 수용하도록 구성된 적어도 하나의 스페이서 장치를 포함할 수 있다. 측정 헤드는 특히 광 수신 섬유의 배열을 고려하여 적어도 하나의 반경방향으로 배열되거나 반경방향으로 대칭인 디자인을 포함할 수 있다. 반경방향으로 배열된 또는 반경방향으로 대칭인 디자인은 측정 값의 견고함을 향상시킬 수 있으며, 특히 물체의 측정 지점에서 강한 흑백 대비에서 또는 오목하거나 볼록한 표면의 측정을 위해 더욱 그렇다.
본원에 사용된 용어 "물체(object)"는 적어도 하나의 광 빔을 방출하는 지점 또는 영역을 의미한다. 광 빔은 물체 및/또는 광 빔을 방출하는 물체에 통합되거나 부착된 적어도 하나의 조명원에 의해서와 같이 물체로부터 시작될 수 있거나, 물체를 직접적으로 또는 간접적으로 조명하는 조명원으로부터와 같이 상이한 조명원으로부터 시작될 수 있으며, 광 빔은 물체에 의해 반사되거나 산란된다. 본원에서 사용되는 용어 "위치(position)"는 물체의 위치 및/또는 배향 및/또는 공간에서 물체의 적어도 하나의 부분에 관한 정보의 적어도 하나의 항목을 의미한다. 따라서, 적어도 하나의 정보 항목은 물체의 적어도 하나의 지점과 적어도 하나의 측정 헤드 사이의 적어도 하나의 거리를 의미할 수 있다. 아래에서 더 자세히 설명하겠지만, 거리는 세로 좌표일 수 있거나, 또는 물체의 지점의 세로 좌표를 결정하는 데 기여할 수 있다. 추가적으로 또는 대안적으로, 물체의 위치 및/또는 배향 및/또는 물체의 적어도 하나의 부분에 관한 하나 이상의 다른 정보 항목이 결정될 수 있다. 일 예로서, 추가적으로, 물체의 적어도 하나의 가로 좌표 및/또는 물체의 적어도 하나의 부분이 결정될 수 있다. 따라서, 물체의 위치는 물체의 적어도 하나의 세로 좌표 및/또는 물체의 적어도 하나의 부분을 의미할 수 있다. 추가적으로 또는 대안적으로, 물체의 위치는 물체의 적어도 하나의 가로 좌표 및/또는 물체의 적어도 하나의 부분을 의미할 수 있다. 추가적으로 또는 대안적으로, 물체의 위치는 물체의 적어도 하나의 배향 정보를 의미할 수 있으며, 이는 공간에서 물체의 배향을 나타낸다.
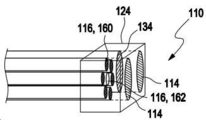
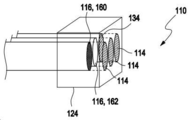
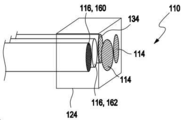
측정 헤드는:
- 적어도 하나의 전송 장치 ― 상기 전송 장치는 물체로부터 측정 헤드로 전파하는 적어도 하나의 입사 광 빔에 응답하여 적어도 하나의 초점 길이를 가짐 ―; 및
- 적어도 2개의 광 수신 섬유 ― 상기 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 가지며, 여기서 k는 열전도율이고, εr은 비유전율임 ―를 포함한다.
"전송 시스템"으로도 또한 지칭되는 용어 "전송 장치"는 일반적으로 예를 들어 광 빔의 빔 파라미터, 광 빔의 폭 또는 광 빔의 방향 중 하나 이상을 수정하는 것과 같이 광 빔을 수정하도록 구성된 하나 이상의 광학 요소를 지칭할 수 있다. 전송 장치는 광 빔을 광 수신 섬유로 안내하도록 구성될 수 있다. 전송 장치는 구체적으로 적어도 하나의 렌즈, 예를 들어, 적어도 하나의 초점-조정 가능 렌즈, 적어도 하나의 비구면 렌즈, 적어도 하나의 구면 렌즈, 적어도 하나의 프레넬(Fresnel) 렌즈로 구성되는 그룹으로부터 선택된 적어도 하나의 렌즈; 적어도 하나의 굴절 광학 요소; 적어도 하나의 오목 미러; 적어도 하나의 빔 편향 요소, 바람직하게 적어도 하나의 미러; 적어도 하나의 빔 분할 요소, 바람직하게 빔 분할 큐브 또는 빔 분할 미러 중 적어도 하나; 적어도 하나의 멀티-렌즈 시스템 중 하나 이상을 포함할 수 있다. 전송 장치는 적어도 하나의 그래디언트 인덱스(GRIN: gradient index) 렌즈를 포함할 수 있다. GRIN 렌즈는 연속적인 굴절 구배, 예를 들어 축방향 및/또는 반경방향 및/또는 구면 굴절 구배를 가질 수 있다. GRIN 렌즈의 f-넘버는 렌즈 길이에 따라 달라질 수 있다. GRIN 렌즈를 사용하면 특히 매우 얇은 광학장치를 사용하여 광학장치를 소형화할 수 있다. 예를 들어, 0.2㎜의 두께 또는 직경을 갖는 매우 얇은 광학장치가 가능할 수 있다. 전송 장치는 예를 들어 토러스 형태(torus form)와 같은 적어도 하나의 환형 축 렌즈를 포함할 수 있다. 환형 축 렌즈는 평면 볼록 형태, 예를 들어 축방향 및/또는 반경방향 및/또는 구형 곡률을 가질 수 있다.
전송 장치는 물체에서 측정 헤드로 전파되는 적어도 하나의 입사 광 빔에 응답하여 초점 거리를 갖는다. 본 명세서에서 사용되는 바와 같이, 전송 장치의 "초점 길이"라는 용어는 전송 장치에 충돌할 수 있는 입사 시준 광선이 "초점 지점"으로도 표시될 수 있는 "초점"으로 가져오는 거리를 의미한다. 따라서, 초점 길이는 충돌하는 광 빔을 수렴하기 위한 전송 장치의 능력의 척도를 구성한다. 따라서, 전송 장치는 수렴 렌즈의 효과를 가질 수 있는 하나 이상의 이미징 요소를 포함할 수 있다. 예로서, 전송 장치는 하나 이상의 렌즈, 특히 하나 이상의 굴절 렌즈 및/또는 하나 이상의 볼록 미러를 가질 수 있다. 이러한 예에서, 초점 길이는 얇은 굴절 렌즈의 중심에서 얇은 렌즈의 주요 초점 지점까지의 거리로 정의될 수 있다. 볼록 또는 양면 볼록 얇은 렌즈와 같은 수렴형 얇은 굴절 렌즈의 경우, 초점 길이는 양의 값으로 간주될 수 있으며, 전송 장치로서 얇은 렌즈에 충돌하는 시준된 광의 빔이 단일 스폿에 초점을 맞출 수 있는 거리를 제공할 수 있다. 추가적으로, 전송 장치는 적어도 하나의 파장 선택 요소, 예를 들어 적어도 하나의 광학 필터를 포함할 수 있다. 추가로, 전송 장치는 예를 들어 센서 구역 및 특히 센서 영역의 위치에서 전자기 방사에 사전규정된 빔 프로파일을 표시하도록 설계될 수 있다. 전송 장치의 상술된 선택적 실시예는 원칙적으로 개별적으로 또는 임의의 원하는 조합으로 실현될 수 있다.
전송 장치는 광 축을 구비할 수 있다. 본 명세서에서 사용되는 용어 "전송 장치의 광 축"은 일반적으로 렌즈 또는 렌즈 시스템의 미러 대칭 또는 회전 대칭의 축을 의미한다. 특히, 측정 헤드와 전송 장치는 공통 광 축을 갖는다. 측정 헤드의 광 축은 측정 헤드의 광학 설정의 대칭선일 수 있다. 측정 헤드는 적어도 하나의 렌즈를 갖는 적어도 하나의 전송 시스템을 포함할 수 있다. 예를 들어, 전송 시스템은 적어도 하나의 빔 경로를 포함할 수 있으며, 빔 경로에서 전송 시스템의 요소들은 광 축에 대해 회전식으로 배열되거나 심지어 대칭 방식으로 배치된다. 여전히, 아래에서 더 자세히 설명되는 바와 같이, 빔 경로 내에 위치된 하나 이상의 광학 요소는 또한 광 축에 대해 중심을 벗어나거나 기울어질 수 있다. 그러나, 이 경우, 광 축은 예를 들어 렌즈의 중심을 상호 연결함으로써 빔 경로에서 광학 요소의 중심을 상호 연결하는 것과 같이 순차적으로 형성될 수 있으며, 여기에서 이러한 맥락에서, 광학 센서는 광학 요소로 계산되지 않는다. 광 축은 일반적으로 빔 경로를 나타낼 수 있다. 여기에서, 측정 헤드는 광 빔이 물체로부터 광 수신 섬유로 이동할 수 있는 단일 빔 경로를 가질 수 있거나, 복수의 빔 경로를 가질 수 있다. 예를 들어, 단일 빔 경로가 제공되거나, 빔 경로가 2개 이상의 부분 빔 경로로 분할될 수 있다. 후자의 경우, 각 부분 빔 경로는 그 자체 광 축을 가질 수 있다. 광 수신 섬유는 하나의 그리고 동일한 빔 경로 또는 부분 빔 경로에 위치될 수 있다. 그러나, 대안적으로, 광 수신 섬유는 상이한 부분 빔 경로에 또한 위치될 수 있다.
전송 장치는 좌표계를 구성할 수 있으며, 여기서 세로 좌표(l)는 광 축을 따른 좌표이고, d는 광 축으로부터의 공간 오프셋이다. 좌표계는, 전송 장치의 광 축이 z 축을 형성하고 그리고 z 축으로부터의 거리 및 극 각도(polar angle)를 추가 좌표로 사용할 수 있는 극 좌표계일 수 있다. z 축에 평행하거나 역평행한 방향은 세로 방향으로 간주될 수 있으며, z 축을 따르는 좌표는 세로 좌표(l)로 간주될 수 있다. z 축에 수직인 임의의 방향은 가로 방향으로 간주될 수 있으며, 극 좌표 및/또는 극 각도는 가로 좌표로 간주될 수 있다.
용어 "광 빔"은 일반적으로 특정 방향으로 방출 및/또는 반사되는 광의 양을 지칭할 수 있다. 따라서, 광 빔은 광 빔의 전파 방향에 수직인 방향으로 사전결정된 연장부를 갖는 광 빔의 다발일 수 있다. 바람직하게, 광 빔은 하나 이상의 가우시안(Gaussian) 빔 매개변수에 의해 특성화될 수 있는 가우시안 광 빔의 선형 조합과 같은 하나 이상의 가우시안 광 빔이나 이를 포함할 수 있으며, 예를 들어 빔 직경의 개달 및/또는 공간에서의 빔 전파를 특성화하는 데 적합한 빔 웨이스트, 레일리-길이(Rayleigh-length), 임의의 다른 빔 매개변수 또는 빔 매개변수의 조합 중 하나 이상이다. 본 명세서에서 사용되는 용어 "광선"은 일반적으로 에너지 흐름의 방향을 가리키는 빛의 파면에 수직인 선을 의미한다. 본 명세서에서 사용되는 용어 "빔"은 일반적으로 광선의 집합체를 의미한다. 하기에서, "광선" 및 "빔"이라는 용어는 동의어로 사용될 것이다. 또한 본 명세서에서 사용되는 "광 빔"이라는 용어는 일반적으로 광량, 특히 광 빔이 확산 각도 또는 확장 각도를 가질 가능성을 포함하여 본질적으로 동일한 방향으로 이동하는 광량을 지칭한다. 광 빔은 공간적 확장을 가질 수 있다. 구체적으로, 광 빔은 비-가우시안 빔 프로파일을 가질 수 있다. 빔 프로파일은 사다리꼴 빔 프로파일; 삼각형 빔 프로파일; 원추형 빔 프로파일로 구성되는 그룹으로부터 선택될 수 있다. 사다리꼴 빔 프로파일은 플래토 영역(plateau region) 및 적어도 하나의 에지 영역을 가질 수 있다. 본 명세서에서 사용되는 용어 "빔 프로파일"은 일반적으로 광 빔의 가로 강도 프로파일을 지칭한다. 빔 프로파일은 특히 광 빔의 전파에 수직인 적어도 하나의 평면에서 광 빔의 강도의 공간 분포일 수 있다. 광 빔은 구체적으로 가우시안 광 빔 또는 가우시안 광 빔의 선형 조합일 수 있으며, 아래에서 자세히 설명한다. 그러나, 다른 실시예도 가능하다. 측정 헤드는 빔 프로파일, 특히 빔 프로파일의 형상을 조정, 형성 및 결정하는 것 중 하나 이상을 위해 구성된 적어도 하나의 전송 장치를 포함할 수 있다. 본원에서 사용되는 용어 "광"은 일반적으로 가시 스펙트럼 범위, 자외선 스펙트럼 범위 및 적외선 스펙트럼 범위 중 하나 이상의 전자기 복사를 의미한다. 여기서, 가시 스펙트럼 범위라는 용어는 일반적으로 380㎚ 내지 780㎚의 스펙트럼 범위를 의미한다. 적외선 스펙트럼 범위라는 용어는 일반적으로 780㎚ 내지 1㎜의 범위, 바람직하게 780㎚ 내지 3.0 마이크로미터의 범위의 전자기 방사를 나타낸다. 용어 자외선 스펙트럼 범위는 일반적으로 1㎚ 내지 380㎚ 범위, 바람직하게 100㎚ 내지 380㎚ 범위의 전자기 복사를 지칭한다. 바람직하게, 본 발명에서 사용되는 광은 가시광, 즉 가시 스펙트럼 범위의 광이다.
본 명세서에서 사용된 바와 같이, 용어 "광 섬유"는 그 일반적인 의미를 가지며, 특히 광 섬유의 입구 면에 충돌하는 적어도 하나의 광 빔을 광 섬유의 출구 면으로 적어도 부분적으로 안내하도록 구성된 적어도 하나의 광학 요소를 지칭한다. 입구 면과 출구 면은 일정한 거리만큼 서로 분리될 수 있으며, 적어도 하나의 도광 구조에 의해 연결될 수 있다. 본 명세서에서 사용된 바와 같이, "적어도 부분적으로 안내하는"이라는 용어는 완벽한 도광 및 입구 면으로부터의 흡수 및 반사 및/또는 도광 구조로부터의 흡수 및 반사가 가능한 구성을 지칭한다. 구체적으로, 광 수신 섬유 각각은 적어도 하나의 광 측정 섬유일 수 있고 및/또는 이를 포함할 수 있다. 본 명세서에서 사용되는 용어 "광학 측정 섬유"는 도입 광 빔을 적어도 하나의 광학 센서에 제공하도록 구성된 적어도 하나의 광 섬유를 갖는 적어도 하나의 각도 의존 광학 요소를 지칭한다. 광 수신 섬유는 2개의 단부를 포함할 수 있다. 광 수신 섬유는 물체로부터 발생하는 적어도 하나의 광 빔을 수신하도록 구성된 적어도 하나의 수신 단부를 포함할 수 있다. 광 수신 섬유는 물체로부터 발생하는 광 빔이 광 수신 섬유를 떠나는 적어도 하나의 출구 단부를 포함할 수 있다. 수신 단부는 또한 적어도 하나의 수신 섬유의 적어도 하나의 입구 면으로 표시될 수 있으며, 이는 또한 물체로부터 측정 헤드로 이동하는 광 빔이 광 수신 섬유에 충돌하는 위치로 표시될 수 있다. 이 이론에 얽매이지 않고, 입사각이 광 수신 섬유의 허용 각도와 같거나 작은 것을 가정하면, 광 수신 섬유에 의해 수신된 광 빔의 입사각은 입사각이 출사 각과 동일하도록 보존되어 있는 것으로 고려된다. 따라서, 광 빔에 인코딩된 거리 정보는 본질적으로 보존될 수 있으며, 결합된 신호(Q)를 사용하여 평가될 수 있으며, 이에 대해서는 아래에서 자세히 설명한다.
광 수신 섬유는 반사 효과를 무시하고 광 수신 섬유에 평행한, 즉 0°의 각도로 들어오는 광선에 대해 가장 높은 투과도가 되도록 설계될 수 있다. 광 수신 섬유는 예를 들어 1° 내지 10°의 각도와 같이 더 높은 각도의 경우 투과도가 평행 광선에 대한 투과도의 약 80%로 부드럽게 감소하고 그리고 이 수준을 광 수신 섬유의 허용 각도까지 지속적으로 유지할 수 있도록 설계될 수 있다. 본 명세서에서 사용되는 바와 같이, "허용 각도"라는 용어는 광선이 광 수신 섬유에서 반사되도록 각 광 수신 섬유 내에서 전반사가 불가능한 각도를 의미할 수 있다. 광 수신 섬유는 허용 각도에서 투과도가 급격히 0으로 떨어질 수 있도록 설계될 수 있다. 입사각이 큰 광선은 차단될 수 있다.
광 수신 섬유는 흡수 및/또는 반사되지 않는 입사 광 빔의 적어도 일부를, 입구 단부 및 출구 단부와 같은 각각의 광 수신 섬유의 2개의 단부 사이에서 투과시키도록 구성될 수 있다. 광 수신 섬유는 길이를 가질 수 있고, 거리를 통한 전송을 허용하도록 구성될 수 있다. 광 수신 섬유는 실리카, 알루미노실리케이트 유리, 게르만 실리케이트 유리, 플루오르지르코네이트, 희토류 도핑 유리, 불화물 유리, 칼코제나이드 유리, 사파이어, 특히 실리카 유리용 도핑된 변형체, 포스페이트 유리, PMMA, 폴리스티렌, 폴리(퍼플루오로-부테닐비닐 에테르)와 같은 플루오로폴리머 등으로 구성되는 그룹으로부터 선택된 적어도 하나의 재료를 포함할 수 있다. 광 수신 섬유는 단일 또는 다중-모드 섬유일 수 있다. 각각의 광 수신 섬유는 스텝 인덱스 섬유, 편광 섬유, 편광 유지 섬유, 플라스틱 광 수신 섬유 등 중 하나 이상이거나 또는 이를 포함할 수 있다.
각각의 광 수신 섬유는 적어도 하나의 섬유 클래딩에 의해 둘러싸인 적어도 하나의 섬유 코어를 포함할 수 있다. 섬유 클래딩은 섬유 코어로서 더 낮은 굴절률을 가질 수 있다. 섬유 클래딩은 또한 이중 또는 다중 클래딩일 수 있다. 섬유 클래딩은 소위 아우터 재킷을 포함할 수 있다. 섬유 클래딩은 손상 및 습기로부터 광 수신 섬유를 보호하도록 구성된 소위 버퍼에 의해 코팅될 수 있다. 버퍼는 적어도 하나의 UV 경화된 우레탄 아크릴레이트 복합물 및/또는 적어도 하나의 폴리이미드 재료를 포함할 수 있다. 일 실시예에서, 섬유 코어의 굴절률은 섬유 클래딩 재료의 굴절률보다 높을 수 있고, 광 수신 섬유는 허용 각도 하의 내부 전반사에 의해 들어오는 광 빔을 안내하도록 구성될 수 있다. 일 실시예에서, 광 수신 섬유는 광 밴드갭 섬유라고도 하는 적어도 하나의 중공 코어 섬유를 포함할 수 있다. 중공-코어 섬유는 본질적으로 소위 중공 영역 내에서 들어오는 광 빔을 안내하도록 구성될 수 있으며, 여기서 광 빔의 작은 부분은 섬유 클래딩 재료로의 전파로 인해 손실된다.
광 수신 섬유는 각각의 광 수신 섬유의 단부에 하나 이상의 섬유 커넥터를 포함할 수 있다. 광 수신 섬유는 코어리스 엔드 캡과 같은 엔드 캡을 포함할 수 있다. 광 수신 섬유는 섬유 커플러, 섬유 브래그 격자(Bragg grating), 섬유 편광기, 섬유 증폭기, 섬유 결합 다이오드 레이저, 섬유 충돌기, 섬유 조인트, 섬유 스 플라이싱, 섬유 커넥터, 기계적 접합, 융착 접합 등 중 하나 이상을 포함할 수 있다. 광 수신 섬유는 폴리머 코팅을 포함할 수 있다.
광 수신 섬유는 적어도 2개 이상의 섬유를 포함할 수 있다. 광 수신 섬유 중 적어도 하나는 적어도 하나의 다중갈래 광 섬유, 특히 적어도 하나의 2갈래 광 섬유일 수 있다. 예를 들어, 2갈래 광 섬유는 2개의 섬유, 특히 적어도 하나의 제 1 섬유 및 적어도 하나의 제 2 섬유를 포함할 수 있다. 제 1 섬유와 제 2 섬유는 2갈래 광 섬유의 입구 단부에서 서로 가깝게 배열될 수 있고, 2갈래 광 섬유의 출구 단부에서 거리를 두고 분리된 2개의 레그로 분할될 수 있다. 제 1 및 제 2 섬유는 동일한 특성을 갖는 섬유로 설계되거나, 상이한 유형의 섬유일 수 있다. 제 1 섬유는 적어도 하나의 제 1 투과 광 빔을 생성하도록 구성될 수 있고, 제 2 섬유는 적어도 하나의 제 2 투과 광 빔을 생성하도록 구성될 수 있다. 2갈래 광 섬유는 입사 광 빔이 제 1 입사각에서 제 1 섬유에 그리고 제 1 입사각과 상이한 제 2 입사각에서 제 2 섬유에 충돌하도록 배열될 수 있으며, 그 결과 투과도는 제 1 투과 광 빔과 제 2 투과 광 빔에 대해 상이하다. 광 수신 섬유 중 적어도 하나는 2개 이상의 섬유, 예를 들어 3개, 4개 또는 그 이상의 섬유를 포함할 수 있다. 예를 들어, 다중갈래는 다중 섬유를 포함할 수 있으며, 각 섬유는 코어, 클래딩, 버퍼, 재킷 중 적어도 하나를 포함할 수 있으며, 하나 이상의 섬유는 폴리머 호스와 같은 추가 재킷에 의해 부분적으로 또는 전체적으로 번들링되어, 섬유들이 섬유의 일 단부에서와 같이 서로 가깝게 유지되는 것을 보장한다. 모든 광 수신 섬유는 동일한 개구 수를 가질 수 있다. 모든 광 수신 섬유는 물체에서 측정 헤드로 전파되는 광 빔이 전송 장치와 전송 장치의 초점 사이의 모든 광 수신 섬유에 충돌하도록 배열될 수 있다. 광 수신 섬유는 물체로부터 측정 헤드로 전파되는 광 빔이 광 수신 섬유에 충돌하는 광 축을 따른 위치가 모든 광 수신 섬유에 대해 동일하도록 배열될 수 있다. 다른 배열이 가능할 수 있다.
광 수신 섬유는 광범위한 환경에서 거리 측정의 안정성을 확보하기 위해서 특정 기계적 특성을 가질 수 있다. 광 수신 섬유의 기계적 특성은 동일하거나, 광 수신 섬유의 기계적 특성은 상이할 수 있다. 이 이론에 얽매이지 않고, 다양하고 빠르게 변화하는 환경 조건에서 측정하기 위한 광 수신 섬유를 포함하는 광학 시스템의 신뢰성은 굴절률과 특정 에너지 전송 특성의 관계에 의존한다. 추가적인 특정 기계적 파라미터는 광 수신 섬유를 포함한 광학 시스템의 모든 기능이 특히 조건의 변화 동안에 안정된 방식으로 유지되는 전제 조건이 될 수 있다. 따라서, 특정 기계적 파라미터는 안정적인 측정 자체를 보장하기 위한 전제 조건으로 작동할 수 있다. 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 갖는다. 바람직하게, 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.743(m·K)/W를 가지며, 바람직하게 비율은 εr/k≥1.133(m·K)/W이다. 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 범위 0.362(m·K)/W≤εr/k≤1854(m·K)/W에서의 비율(εr/k)을 가지며, 여기서 k는 열전도율이고, εr은 비유전율이다. 이러한 장치 및/또는 전기 스파크 또는 가열 아크 장치 등에 의해 방출되는 전기장과 관련된 전기 가열 장치 및/또는 전기 냉각 장치와 관련된 급속 열 순환 및/또는 고온 또는 저온의 환경에서 이 이론에 얽매이지 않고, 열전도율 및 유전율의 지수에 대해 주어진 범위 내에서 광학 시스템을 사용하는 것은 이러한 환경에서 우수한 안정성을 가진 측정 헤드를 산출하는 것으로 나타났다. 비유전율은 유전율이라고도 한다. 바람직하게, 비율(εr/k)은 범위 0.743(m·K)/W≤εr/k≤194(m·K)/W이다. 보다 바람직하게, 비율(εr/k)은 범위 1.133(m·K)/W≤εr/k≤88.7(m·K)/W이다. 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 범위 1.02≤εr≤18.5, 바람직하게 범위 1.02≤εr≤14.5, 보다 바람직하게 범위 1.02≤εr≤8.7의 비유전율을 가질 수 있으며, 비유전율은 20℃ 및 1㎑에서 측정된다. 광 수신 섬유 및/또는 전송 장치는 k≤24W/(m·K), 바람직하게 k≤17W/(m·K), 보다 바람직하게 k≤14W/(m·K)의 열전도율을 가질 수 있다. 광 수신 섬유 및/또는 전송 장치는 k≥0.003W/(m·K), 바람직하게 k≤0.007W/(m·K), 보다 바람직하게 k≤0.014W/(m·K)의 열전도율을 가질 수 있다. 열전도율은 0℃ 및 <1% 상대 습도에서 측정할 수 있다.
전송 장치는 범위 9.05≤ve/nD≤77.3의 비율 ve/nD를 가질 수 있으며, 여기서 ve는 아베-수(Abbe-number)이고, nD는 굴절률이다. 아베-수 ve는  로 주어지며, 여기에서 ni는 상이한 파장에 대한 굴절률이며, nC는 656㎚에 대한 굴절률이며, nD는 589㎚에 대한 굴절률이며, nF는 실온에서 측정한 486㎚에 대한 굴절률이며, https://en.wikipedia.org/wiki/Abbe_number를 참조하기 바란다. 바람직하게, 비율은 13.9≤νe/nD≤44.7의 범위, 보다 바람직하게 비율 νe/nD는 범위 15.8≤νe/nD≤40.1이다. 이러한 이론에 얽매이지 않고, 굴절률은 항상 제조 허용오차에 의존한다. 또한 굴절률은 온도에 따라 다르다. 또한, 광원의 파장은 항상 온도 변화와 관련하여 주어진 허용오차를 갖는다. 빠르게 변화하거나 매우 높은 온도 또는 제어되지 않는 주변 환경에도 불구하고 안정적인 거리 측정을 보장하기 위해, 아베-수 대 굴절률 지수를 필요한 안정성 범위를 보장하는 값으로 제한할 수 있다.
로 주어지며, 여기에서 ni는 상이한 파장에 대한 굴절률이며, nC는 656㎚에 대한 굴절률이며, nD는 589㎚에 대한 굴절률이며, nF는 실온에서 측정한 486㎚에 대한 굴절률이며, https://en.wikipedia.org/wiki/Abbe_number를 참조하기 바란다. 바람직하게, 비율은 13.9≤νe/nD≤44.7의 범위, 보다 바람직하게 비율 νe/nD는 범위 15.8≤νe/nD≤40.1이다. 이러한 이론에 얽매이지 않고, 굴절률은 항상 제조 허용오차에 의존한다. 또한 굴절률은 온도에 따라 다르다. 또한, 광원의 파장은 항상 온도 변화와 관련하여 주어진 허용오차를 갖는다. 빠르게 변화하거나 매우 높은 온도 또는 제어되지 않는 주변 환경에도 불구하고 안정적인 거리 측정을 보장하기 위해, 아베-수 대 굴절률 지수를 필요한 안정성 범위를 보장하는 값으로 제한할 수 있다.
전술한 바와 같이, 각각의 광 수신 섬유는 적어도 하나의 클래딩 및 적어도 하나의 코어를 포함할 수 있다. 곱 αΔn은 가시 및 근적외선 파장 범위에서의 적어도 하나의 파장, 바람직하게 656㎚, 589㎚ 또는 486㎚로부터 선택된 적어도 하나의 파장 적어도 하나의 파장에서 αΔn≤110dB/km에 있을 수 있으며. 여기서 α는 감쇠 계수이고, Δn은 Δn=(n1 2-n2 2)/(2n1 2)을 갖는 굴절률 대비이며, n1은 최대 코어 굴절률이고, n2는 클래딩 굴절률이다. 바람직하게, 곱 αΔn은 αΔn≤23dB/km, 바람직하게 αΔn≤11.26B/km이다. 곱 αΔn은 가시 및 근적외선 파장 범위에서의 적어도 하나의 파장, 바람직하게 656㎚, 589㎚ 또는 486㎚로부터 선택된 적어도 하나의 파장 적어도 하나의 파장에서 범위 0.0004dB/km≤αΔn≤110dB/km에 있을 수 있다. 바람직하게, 곱 αΔn은 범위 0.002dB/km≤αΔn≤23dB/km, 보다 바람직하게 범위 0.02dB/km≤αΔn≤11.26dB/km에 있다. 굴절률 대비는 범위 0.0015≤Δn≤0.285, 바람직하게 범위 0.002≤Δn≤0.2750, 보다 바람직하게 범위 0.003≤Δn≤0.25에 있다. 광 수신 섬유의 감쇠 계수는 범위 0.2dB/km≤α≤420dB/km, 바람직하게 범위 0.25dB/km≤α≤320dB/km에 있을 수 있다. 전송 장치는 개구 면적(D1)을 가질 수 있고, 광 수신 섬유 중 적어도 하나는 단면적(D2)을 갖는 섬유 코어일 수 있으며, 여기서 비율 D1/D2는 범위 0.54≤D1/D2≤5087, 바람직하게 1.27≤D1/D2≤413, 보다 바람직하게 2.17≤D1/D2≤59.2이다. 이 이론에 얽매이지 않고, 광학 시스템의 기계적 경계를 제한하면 광학 시스템과 관련된 측정 안정성이 크게 향상될 수 있다. 적어도 하나의 광 수신 섬유 코어의 직경(dcore)은 범위 2.5㎛≤dcore≤10000㎛, 바람직하게 범위 7㎛≤dcore≤3000㎛, 보다 바람직하게 범위 10㎛≤dcore≤500㎛에 있을 수 있다. 이 이론에 얽매이지 않고, 광 수신 섬유의 굴절률 대비는 제조 허용오차 및/또는 제조 품질과 관련하여 민감하며, 다시 온도 변화 및/또는 고온에 민감하다. 또한, 굴절률 대비와 관련이 없고 주로 재료 특성의 영향을 받는 감쇠 계수는 제조 품질, 온도 변화, 높은 작동 온도 등에 대해 비슷한 감도를 나타낸다. 또한, 환경 파라미터의 강력한 독립성이 요구되는 경우, 측정 헤드의 적절한 기능을 보장하기 위해 이러한 양의 관련 감도를 특정 범위로 제한해야 한다.
광 수신 섬유 및/또는 전송 장치는 예를 들어 초음파 테스트를 사용하여 실온에서 측정된 188GPa 이하의 탄성 계수라고도 불리는 영 계수를 가질 수 있다. 바람직하게, 광 수신 섬유 및/또는 전송 장치는 167GPa 이하, 보다 바람직하게 범위 0.0001GPa 내지 97GPa의 영 계수를 가질 수 있다. 광 수신 섬유 및/또는 전송 장치는 0.0001GPa 이상, 바람직하게 0.007GPa 이상, 보다 바람직하게 0.053GPa 이상의 영 계수를 가질 수 있다.
상기 개요와 같이, 각각의 광 수신 섬유는 적어도 하나의 입구 면을 가질 수 있다. 각각의 입구 면의 기하학적 중심은 전송 장치의 광 축에 대해 수직으로 정렬될 수 있다. 여기서 사용된 바와 같이, 영역의 "기하학적 중심"이라는 용어는 일반적으로 영역의 무게 중심을 의미할 수 있다. 예를 들어, 영역 내부 또는 외부의 임의의 점이 선택된다면 그리고 이 임의의 점을 영역의 각각의 및 모든 점과 상호연결하는 벡터 위에 적분이 형성된다면, 적분은 임의의 지점의 위치의 함수이다. 임의의 점이 영역의 기하학적 중심에 있을 때, 적분 절대 값의 적분은 최소화된다. 따라서, 환언하면, 기하학적 중심은 영역의 모든 지점에서 최소 전체 또는 합계 거리가 있는 영역 내부 또는 외부의 지점일 수 있다.
광 수신 섬유 중 적어도 하나는 물체를 향하는 입구 면을 가질 수 있다. 본 명세서에서 사용되는 용어 "물체를 향한다"는 일반적으로 입구 면의 각각의 표면 또는 개구부가 물체로부터 완전히 또는 부분적으로 보이는 상황을 지칭한다. 구체적으로, 물체의 적어도 하나의 지점과 각각의 입구 면의 적어도 하나의 지점 사이의 적어도 하나의 상호연결 라인은 20° 내지 90°, 바람직하게 90°와 같은 80° 내지 90°의 범위와 같은 0°와 상이한 입구 면의 표면 요소와 각도를 형성할 수 있다. 따라서, 물체가 광 축 상에 위치하거나 광 축에 가깝게 위치될 때, 물체로부터 측정 헤드를 향해 전파하는 광 빔은 본질적으로 광 축에 평행할 수 있다. 본원에 사용된 용어 "본질적으로 수직"은 예를 들어 ±20° 이하, 바람직하게 ±10° 이하, 보다 바람직하게 ±5° 이하의 허용 오차를 갖는 수직 배향의 상태를 지칭한다. 유사하게, "본질적으로 평행한"이라는 용어는 ±20° 이하, 바람직하게 ±10° 이하, 보다 바람직하게 ±5° 이하의 허용 오차를 갖는 평행 배향의 상태를 지칭한다. 추가적으로 또는 대안적으로, 입구 면들 중 적어도 하나는 물체를 향한 배향과 상이하게 배향될 수 있다. 예를 들어, 입구 면들 중 적어도 하나는 광 축과 물체에 대해 임의의 각도로 또는 수직으로 배향될 수 있다.
전송 장치는 광 빔의 전파의 방향을 조정 및/또는 변경하도록 구성될 수 있다. 특히, 전송 장치는 적어도 하나의 GRIN 렌즈 및/또는 적어도 하나의 회절 광학 요소(DOE)이거나 이를 포함할 수 있다. 전송 장치는 예를 들어 물체에서 측정 헤드로 전파되는 광 빔을 전환하도록 영향을 미치도록 구성될 수 있다. 특히, 전송 장치는 광 빔의 전파의 방향을 조정하도록 구성될 수 있다. 전송 장치는 전송 장치의 광 축에 대해 전파의 각도를 조정 및/또는 생성하도록 구성될 수 있다. 전파의 각도는 전송 장치의 광 축과, 물체에서 측정 헤드로 전파하는 광 빔의 전파의 방향 사이의 각도일 수 있다. 전송 장치를 사용하지 않고, 광 빔의 전파의 각도는 주로 광 빔이 생성된 표면 특성 및/또는 재료 특성과 같은 물체의 특성에 따라 달라질 수 있다. 전송 장치는 물체의 표면 특성과 무관하도록 전파의 각도를 조정 및/또는 생성하도록 구성될 수 있다. 전송 장치는 광 빔의 전파의 방향의 각도 의존성을 강화 및/또는 증폭하도록 구성될 수 있다. 이론에 얽매이지 않고, 물체에 의해 생성된 광 빔은 물체에서 측정 헤드로 전파될 수 있으며, 0°, 즉 물체의 산란의 원점과 전송 장치의 에지 의해 정의될 수 있는 광 축에서 임의의 각도(X)까지의 각도 범위에서 전송 장치에 충돌할 수 있다. 전송 장치는 초점 특성을 포함할 수 있으므로, 전송 장치를 통과한 후의 각도 범위는 원래 각도 범위와 크게 상이할 수 있다. 예를 들어, 광 축에 평행하게 충돌하는 광 빔은 초점 또는 초점에 초점을 맞출 수 있다. 전송 장치의 초점 특성에 따라, 전송 장치에 충돌하기 전과 전송 장치를 통과한 후 각도 의존성이 반전될 수 있다. 전송 장치는, 즉 물체가 원거리에 배열된 경우 원거리 장에 대한 각도 의존성을 증폭하도록 구성될 수 있는데, 광 빔은 본질적으로 광 축에 평행하게 전파된다. 일반적으로, 전송 장치를 사용하지 않으면, 근거리 장 영역에서 각도 의존성이 가장 클 수 있다. 근거리 장에서, 신호는 일반적으로 원거리 장 신호에 비해 더 강할 수 있다. 따라서, 원거리 장에서 각도 의존성을 증폭시키는 전송 장치로 인해 근거리 장에서 더 작은 각도 의존성은 근거리 장에서 일반적으로 더 나은 신호 대 잡음비에 의해 및/또는 0이 아닌 베이스라인으로 인한 거리 의존적 스폿-이동과 같은 추가적인 근거리 장 특성을 사용함으로써 적어도 부분적으로 보상될 수 있다. 추가적으로 또는 대안적으로, 광 빔의 전파의 방향을 조정 및/또는 변경하기 위해, 광 수신 섬유 중 적어도 하나는 성형 및/또는 구조화된 입구 및/또는 출구 면을 갖는 구조화된 섬유일 수 있다. 구조화된 섬유를 사용하면 들어오는 광 빔의 각도 의존성을 더욱 높일 수 있다.
광 수신 섬유는 물체로부터 전송 장치 뒤의 측정 헤드로 전파하는 입사 광 빔의 전파의 방향으로 배열될 수 있다. 광 수신 섬유 및 전송 장치는, 물체에서 측정 헤드로 전파되는 광 빔이 광 수신 섬유에 충돌하기 전에 전송 장치를 통과하도록 배열될 수 있다. GRIN 렌즈 및 광 수신 섬유와 같은 전송 장치는 일체형으로 구성될 수 있다. 광 수신 섬유는 굴절률의 차이가 더 큰 계면에서의 반사를 줄이기 위해 폴리머 또는 접착제 등에 의해 전송 장치에 부착될 수 있다. 대안적으로, 전송 장치 및 광 수신 섬유는 광 축에 대해 또는 평행한 방향으로 분리되는 것과 같이 공간적으로 분리되어 배열될 수 있다. 전송 장치 및/또는 광 수신 섬유는 광 축에 수직인 방향으로 변위되어 배열될 수 있다. 광 수신 섬유는 예를 들어 물체에서 측정 헤드로 전파되는 광 빔이 전송 장치와 전송 장치의 초점 사이의 광 수신 섬유에 충돌하도록 배열될 수 있다. 예를 들어, 전송 장치와, 물체에서 측정 헤드로 전파되는 광 빔이 광 수신 섬유에 충돌하는 위치 사이의 광 축에 평행한 방향의 거리는 초점 거리의 적어도 20%, 보다 바람직하게 초점 거리의 적어도 50%, 가장 바람직하게 초점 거리의 적어도 80%일 수 있다. 예를 들어, 입구 면과, 물체로부터 측정 헤드로 전파하는 광 빔을 수신하는 광 수신 섬유 중 적어도 하나 사이의 광 축에 평행한 방향에서의 거리는 초점 길이의 적어도 20%, 보다 바람직하게 초점 길이의 적어도 50%, 가장 바람직하게 초점 길이의 적어도 80%일 수 있다.
각각의 광 수신 섬유는 물체로부터 측정 헤드를 향해 전파되고 각각의 광 수신 섬유에 충돌하는 입사 광 빔의 입사각에 따라 좌우되는 적어도 하나의 빔 프로파일을 갖는 적어도 하나의 광 빔을 생성하도록 구성될 수 있다. 특히, 각각의 광 수신 섬유는 입사 광 빔의 빔 프로파일에 영향을 미치고 및/또는 변경 및/또는 조정하도록 구성될 수 있다. 예를 들어, 각각의 광학 요소는 각도 의존성 투과 특성, 각도 의존성 반사 특성 또는 각도 의존성 흡수 특성 중 하나 이상을 가질 수 있다. 각각의 광 수신 섬유를 통과한 광 빔은 적어도 하나의 투과 광 빔 및/또는 적어도 하나의 반사 광 빔을 포함할 수 있다. 입사각은 입구 면과 같은 광 수신 섬유의 광 축에 대해 측정될 수 있다.
입구 면에 충돌하는 전자기파는 광 수신 섬유의 특성에 따라 부분적으로 흡수 및/또는 반사 및/또는 전송될 수 있다. 용어 "흡수"는 광 수신 섬유에 의한 입사 광 빔의 파워 및/또는 강도의 감소를 의미한다. 예를 들어, 입사 광 빔의 파워 및/또는 강도는 광 수신 섬유에 의해 열 또는 다른 유형의 에너지로 변환될 수 있다. 본 명세서에서 사용되는 용어 "전송"은 광 축에 대해 90° 이상의 각도로 반-공간에서 광 수신 섬유 외부에서 측정할 수 있는 전자기파의 일부를 의미한다. 예를 들어, 송신은 입구 면에 충돌하고, 광 수신 섬유를 통과하고, 출구 단부에서 광 수신 섬유를 남겨두는 전자기파의 나머지 부분일 수 있다. 용어 "반사"는 광 축에 대해 90° 미만의 각도를 가진 하프 공간에서 광 수신 섬유 외부에서 측정 가능한 전자기파의 일부를 의미한다. 예를 들어, 반사는 광 수신 섬유와의 상호 작용에 의한 입사 광 빔의 파면 방향의 변화일 수 있다. 광 수신 섬유에 충돌하는 전자기파의 총 파워는 광 수신 섬유에 의해 흡수 성분, 반사 성분 및 툭과 성분의 적어도 3개의 성분으로 분산될 수 있다. 투과도는 광 수신 섬유에 충돌하는 전자기파의 총 파워에 의해 표준화된 투과 성분의 파워로 정의될 수 있다. 흡수 정도는 광 수신 섬유에 충돌하는 전자기파의 총 파워에 의해 정규화된 흡수 성분의 파워로 정의될 수 있다. 반사 정도는 광 수신 섬유에 충돌하는 전자기파의 총 파워에 의해 정규화된 반사 성분의 파워로 정의될 수 있다. 적어도 하나의 전송 장치를 사용하면 세로 좌표의 측정의 견고성을 더욱 향상시킬 수 있다. 전송 장치는 예를 들어 적어도 하나의 시준 렌즈를 포함할 수 있다. 광 수신 섬유는 더 작은 각도로 입사되는 광선에 비해 더 큰 각도로 충돌하는 광선을 약하게 설계할 수 있다. 예를 들어, 투과도는 광 축에 평행한 광선의 경우, 즉 0°에서 가장 높을 수 있고, 더 높은 각도에서는 감소할 수 있다. 특히, 적어도 하나의 차단 각도에서, 투과도가 급격히 0으로 떨어질 수 있다. 따라서, 입사각이 큰 광선이 차단될 수 있다.
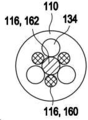
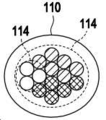
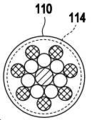
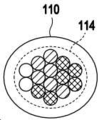
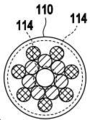
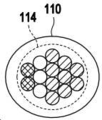
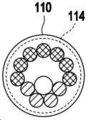
측정 헤드는 복수의 광 수신 섬유, 예를 들어 복수의 단일 광 수신 섬유 또는 복수의 다중갈래 광 수신 섬유를 포함할 수 있다. 예를 들어, 광 수신 섬유는 광 수신 섬유의 다발로 배열될 수 있다. 예를 들어, 측정 헤드는 복수의 단일 광 섬유, 예를 들어 동일한 특성을 갖는 광 수신 섬유를 포함할 수 있다. 광 섬유, 즉 단일 광 섬유 또는 다중갈래 광 섬유는, 입사 광 빔이 각각의 광 섬유에 상이한 입사 각으로 충돌하여 투과도가 광 섬유 각각에 대해 상이하게 되도록 배열될 수 있다.
측정 헤드는 적어도 하나의 스페이서 장치를 포함할 수 있다. 스페이서 장치는 적어도 하나의 전송 장치와 적어도 하나의 광 섬유를 연결하도록 구성될 수 있다. 스페이서 장치는 전송 장치를 광 섬유 중 적어도 하나에 부착하도록 구성될 수 있다. 측정 헤드가 복수의 전송 장치 및/또는 광 섬유를 포함하는 경우, 스페이서 장치는 전송 장치 중 적어도 하나를 광 섬유 중 적어도 하나와 연결하도록 구성될 수 있다. 광 섬유의 광 경로는 내부 반사를 회피하기 위해 완전히 또는 부분적으로 불투명한 기계적 벽 또는 클래딩 등과 같은 기계적 수단에 의해 완전히 또는 부분적으로 광학적으로 분리될 수 있다. 기계적 수단에 의한 이러한 광학적 분리는 스페이서 장치의 일부일 수 있다. 스페이서 장치는 중실 부피(Vs), 및 또한 껍질 부피로 표시되는 중공 부피(Vh)를 포함할 수 있다. 중실 부피는 스페이서 장치가 구성되는 고체 재료의 부피로 정의할 수 있다. 껍질 부피는 볼록 껍질 부피일 수 있다. 스페이서 장치의 볼록 껍질 부피는 스페이서 장치의 중실 부피 중 가장 작은 볼록 껍질의 부피로서 정의될 수 있다. 스페이서 장치의 중공 부피는 스페이서 장치의 볼록한 껍질 부피에서 스페이서 장치의 중실 부피를 뺀 값으로 정의될 수 있다. 예를 들어, 빈 부피는 고체 재료의 내부 에지에 의해 정의될 수 있다. 중실 부피와 중공 부피의 비(Vs/Vh)는 범위 0.013≤Vs/Vh≤547, 바람직하게 범위 0.047≤Vs/Vh≤87.6, 보다 바람직하게 범위 0.171≤Vs/Vh≤26.2일 수 있다.
입사 광 빔은 물체로부터 측정 헤드를 향해 전파될 수 있다. 아래에 추가로 상세하게 설명하는 바와 같이, 입사 광 빔은 예를 들어 물체 및/또는 광 빔을 방출하는 물체에 통합되거나 부착된 적어도 하나의 조명원에 의해 물체로부터 시작될 수 있거나, 또는 물체를 직접적으로 또는 간접적으로 조명하는 조명원으로부터와 같이 상이한 조명원으로부터 시작될 수 있으며, 광 빔은 물체에 의해 반사되거나 산란되어, 이에 의해 적어도 부분적으로 측정 헤드를 향해 지향된다. 예로서, 조명원은 외부 조명원, 검출기에 통합된 조명원, 또는 물체에 부착된 하나 이상의 비콘(beacon) 장치에 통합되고, 물체에 통합되거나 또는 물체에 의해 유지되는 조명원 중 하나 이상이나 이를 포함할 수 있다. 따라서, 측정 헤드는 능동 및/또는 수동 조명 시나리오에서 사용될 수 있다.
측정 헤드는 물체를 조명하기 위한 조명원을 더 포함할 수 있다. 조명원은, 예를 들어, 광 빔을 반사하는 물체를 향해 광 빔을 지향시킴으로써 물체를 조명하도록 구성될 수 있다. 조명원은 물체를 조명하기 위한 조명 광 빔을 생성하도록 구성될 수 있다. 따라서, 조명원은 적어도 하나의 광원을 포함할 수 있다. 구체적으로, 조명원은 적어도 하나의 레이저 및/또는 레이저 소스를 포함할 수 있다. 광원은 적어도 하나의 다중 빔 광원이거나 이를 포함할 수 있다. 예를 들어, 광원은 적어도 하나의 레이저 소스와 하나 이상의 회절 광학 요소(diffractive optical elements: DOE)를 포함할 수 있다. 조명원은 적어도 하나의 각도 의존 광학 요소를 통해 물체를 조명하도록 구성될 수 있다. 반도체 레이저와 같은 다양한 유형의 레이저가 사용될 수 있다. 추가적으로 또는 대안적으로, LED 및/또는 전구와 같은 비-레이저 광원이 사용될 수 있다. 조명원은 점들의 구름(cloud)을 생성하도록 및/또는 투영하도록 구성될 수 있으며, 예를 들어 조명원은 적어도 하나의 디지털 광 처리 프로젝터, 적어도 하나의 LCoS 프로젝터, 적어도 하나의 공간 광 변조기, 적어도 하나의 회절 광학 요소; 발광 다이오드의 적어도 하나의 어레이; 레이저 광원의 적어도 하나의 어레이 중 하나 이상을 포함할 수 있다. 조명원은 인공 조명원, 특히 적어도 하나의 레이저 소스 및/또는 적어도 하나의 백열 램프 및/또는 적어도 하나의 반도체 광원, 예를 들어 적어도 하나의 발광 다이오드, 특히 유기 및/또는 무기 발광 다이오드를 포함할 수 있다. 예를 들어, 조명원에서 방출되는 광은 300 내지 1000㎚, 특히 500 내지 1000㎚의 파장을 가질 수 있다. 추가적으로 또는 대안적으로, 780㎚ 내지 3.0㎛의 범위와 같은 적외선 스펙트럼 범위의 광이 사용될 수 있다. 구체적으로, 실리콘 포토다이오드가 구체적으로 700㎚ 내지 1000㎚ 범위에서 적용될 수 있는 근적외선 영역의 부분의 광이 사용될 수 있다. 일반적으로 정의된 빔 프로파일과 기타 취급성 특성으로 인해, 조명원으로서 적어도 하나의 레이저 소스를 사용하는 것이 특히 바람직하다. 조명원은 검출기의 하우징에 통합될 수 있다.
조명원은 조명 광 빔이 측정 헤드의 광 축을 따라 물체를 향해 측정 헤드로부터 전파되도록 구성될 수 있다. 이를 위해, 측정 헤드는 조명 광 빔을 광 축으로 편향시키기 위한 적어도 하나의 반사 요소, 바람직하게 적어도 하나의 프리즘을 포함할 수 있다.
조명원은 적어도 하나의 광 조명 섬유를 포함할 수 있다. 광 조명 섬유는 적어도 하나의 입구 단부를 가질 수 있다. 적어도 하나의 광원은 입구 단부에 위치될 수 있다. 조명원은 광원에 의해 생성된 적어도 하나의 광 빔을 광 조명 섬유에 결합하도록 구성된 적어도 하나의 결합 요소를 포함할 수 있다. 광 조명 섬유는 적어도 하나의 출구 단부를 더 포함할 수 있고, 출구 단부는 광 조명 섬유를 통과한 광 빔을 방출하도록 구성된다. 조명원은 적어도 하나의 추가 전송 장치를 포함할 수 있다. 추가 전송 장치는 전송 장치와 일체형으로 설계될 수 있으며, 예를 들어 전송 장치는 추가 전송 장치로 사용될 수 있다.
또한, 조명원은 변조된 또는 비-변조된 광을 방출하도록 구성될 수 있다. 복수의 조명원이 사용되는 경우, 상이한 조명원은 이후에 광 빔을 구별하기 위해 사용될 수 있는 상이한 변조 주파수를 가질 수 있다.
조명 광 빔은 측정 헤드, 특히 전송 장치의 광 축에 평행하거나, 또는 예를 들어 광 축과의 각도를 포함하는 광 축에 대해 기울어 질 수 있다. 예를 들어, 레이저 광 빔과 같은 조명 광 빔, 및 광 축은 10° 미만, 바람직하게 5° 미만 또는 심지어 2° 미만의 각도를 포함할 수 있다. 그러나, 다른 실시예가 가능하다. 또한, 조명 광 빔은 광 축 상에 있거나 광 축에서 벗어날 수 있다. 예를 들어, 조명 광 빔은 광 축에 대해 10㎜ 미만, 바람직하게 광 축에 대해 5㎜ 미만 또는 심지어 광 축에 대해 1㎜ 미만의 거리를 갖는 광 축에 평행할 수 있거나, 또는 심지어 광 축과 일치할 수도 있다.
측정 헤드는 물체로부터 측정 헤드로 이동하는 광 빔을 광 섬유에 결합하도록 구성된 추가 결합 요소, 특히 추가 인-커플링(in-coupling) 요소를 포함할 수 있다. 추가 결합 요소는 광 섬유의 전방에서 물체에서 검출기로 이동하는 광 빔의 전파 방향으로 배열될 수 있다. 추가 결합 요소는 적어도 하나의 전송 장치이거나 이를 포함할 수 있다.
측정 헤드는 하나의 조명원 또는 복수의 동일한 조명원 및/또는 복수의 상이한 조명원을 포함할 수 있다. 예를 들어, 복수의 조명원은 색상 또는 변조 주파수와 같은 상이한 특성을 가진 광을 생성하는 적어도 2개의 조명원을 포함할 수 있다.
조명원은 범위 1.5·10-7㎟·sr≤G≤314㎟·sr, 바람직하게 범위 1·10-5㎟·sr≤G≤22㎟·sr, 보다 바람직하게 범위 3·10-4㎟·sr≤G≤3.3㎟·sr의 기하학적 확장(G)을 가질 수 있다. 조명원의 기하학적 확장(G)은 G=A·Ω·n2로 정의될 수 있으며, 여기에서 A는 활성 방출 표면, 광 밸브, 광학 조리개 또는 A=AOF=π·r2 OF를 갖는 섬유 코어 영역이 될 수 있는 표면의 영역이고, Ω는 광에 의해 대치되는 투영된 입체각이고, n은 매체의 굴절률이다. 절반 조리개 각도(θ)를 갖는 회전-대칭 광학 시스템의 경우, 기하학적 확장은 G=π·A·sin2(θ)n2로 정의될 수 있다.
광 섬유의 경우, 발산 각도는 θmax=arcsin(NA/n)에 의해 얻어지며, 여기서 NA는 광 섬유의 최대 개구 수이다.
절반 조리개 각도(θ) 및/또는 발산 각도(θmax)는 작을 수 있다. 특히, 절반 조리개 각도(θ)는 범위 0.01°≤θ≤42°; 바람직하게 범위 0.1°≤θ≤21°; 보다 바람직하게 범위 0.15°≤θ≤13°일 수 있으며 및/또는 발산 각도(θmax)는 범위 0.01°≤θmax≤42°; 바람직하게 범위 0.1°≤θmax≤21°; 보다 바람직하게 범위 0.15°≤θmax≤13°이다. 영역(A)은 작을 수 있다. 특히, 영역(A)은 10㎟보다 작으며, 바람직하게 3㎟보다 작으며, 보다 바람직하게 1㎟보다 작을 수 있다.
측정 헤드는 작은 베이스라인을 포함할 수 있다. 특히, 베이스라인은 적어도 하나의 조명 채널과 검출기의 적어도 하나의 수신기 채널 사이의 거리일 수 있다. 구체적으로, 예를 들어 xy-평면에서 적어도 하나의 조명 채널과 적어도 하나의 수신기 채널 사이의 거리는 가능한 한 작을 수 있다. 본 명세서에서 사용되는 용어 "조명 채널"은 적어도 하나의 물체를 조명하기 위한 적어도 하나의 조명 광 빔을 생성하도록 구성된 광 조명 섬유와 같은 적어도 하나의 조명원을 포함하는 적어도 하나의 광학 채널을 지칭한다. 조명 채널은 적어도 하나의 조명원 및 적어도 하나의 렌즈 요소와 같은 적어도 하나의 송신기 광학장치를 포함할 수 있다. 본 명세서에서 사용되는 용어 "수신기 채널"은 물체로부터 측정 헤드로 전파되는 광 빔을 수신하도록 구성된 광 수신 섬유 중 적어도 하나를 포함하는 적어도 하나의 광 채널을 의미한다. 수신기 채널은 적어도 하나의 전송 장치와 같은 적어도 하나의 수신기 광학장치를 포함할 수 있다. 베이스라인, 즉 조명 채널과 수신기 채널 사이의 거리는 최소 거리일 수 있다. 최소 거리는 송신기 광학장치 및 수신기 광학장치의 구성요소의 크기에만 의존할 수 있다. 최소 거리는 0일 수 있다. 특히, 조명원과 광 수신 섬유의 입구 면 사이에서 측정 헤드의 광 축에 수직인 거리가 작을 수 있다. 각각의 광 수신 섬유는 적어도 하나의 섬유 클래딩 및 적어도 하나의 코어를 포함한다. 비율(d1/BL)은 범위 0.0011≤d1/BL≤513일 수 있으며, 여기서 d1은 코어의 직경이고, BL은 베이스라인이다. 바람직하게, 비율(d1/BL)은 범위 0.0129≤d1/BL≤28, 보다 바람직하게 범위 0.185≤d1/BL≤7.1이다. 베이스라인은 0보다 큰 범위를 가질 수 있다. 베이스라인은 범위 10㎛≤BL≤127000㎛, 바람직하게 범위 100㎛≤BL≤76200㎛, 보다 바람직하게 범위 500㎛≤BL≤25400㎛일 수 있다. 본 명세서에서 사용된 바와 같이, 또한 베이스 라인으로도 지칭되는 용어 "베이스라인"은 예를 들어 xy-평면에서, 적어도 하나의 송신기 광학장치와 적어도 하나의 수신기 광학장치 사이의 거리를 더 지칭한다. 예를 들어, 베이스라인은 광 축과 조명원 사이의 거리, 특히 광 축과 조명 광 빔의 z-성분 사이의 거리일 수 있다. 측정 헤드는 예를 들어 조명원까지의 거리를 추가로 향상시킬 수 있는 추가 광학 요소, 예를 들어 적어도 하나의 미러를 포함할 수 있다. 예를 들어, 베이스라인은 송신기 렌즈와 수신기 렌즈 사이의 거리일 수 있다. 송신기 렌즈는 조명 광 빔의 전파 방향으로 광 조명 섬유 뒤에 배열될 수 있다. 수신기 렌즈는 물체로부터 측정 섬유로 전파하는 광 빔의 전파 방향에서, 측정 섬유로도 지칭되는 광 수신 섬유의 전방에 배열될 수 있다. 전송 장치는 수신기 렌즈를 포함할 수 있다. 구체적으로, 용어 "베이스라인"은 물체로부터 측정 헤드로 전파하는 광 빔이 광 수신 섬유, 특히 적어도 하나의 수신 섬유의 적어도 하나의 입구 면 또는 단부에 충돌하는 위치와, 조명원 및/또는 적어도 하나의 광 조명 섬유의 적어도 하나의 출구 면 또는 단부 사이의 거리를 지칭한다. 본 명세서에서 사용되는 용어 "광 조명 섬유의 입구 면 또는 단부"는 광원에 의해 생성된 광 빔을 수신하도록 구성된 광 조명 섬유의 적어도 하나의 단부를 지칭한다. 용어 "광 조명 섬유의 출구 면 또는 단부"는 광 조명 섬유를 통해 전파하는 광 빔이 광 조명 섬유를 떠나는 광 조명 섬유의 적어도 한 단부를 지칭한다. 본 명세서에서 사용되는 바와 같이, "광 수신 섬유의 입구 면 또는 단부"라는 용어는 물체로부터 측정 헤드로 전파하는 광 빔을 수신하도록 구성된 광 수신 섬유의 적어도 하나의 단부를 지칭한다. 용어 "광 수신 섬유의 출구 면"은 광 수신 섬유를 통해 전파되는 광 빔이 광 수신 섬유를 떠나는 광 수신 섬유의 적어도 하나의 단부를 지칭한다. 광 수신 섬유는 2개의 수신 섬유, 제 1 광학 센서에 광을 제공하는 제 1 광 수신 섬유 및 제 2 광학 센서에 광을 제공하는 제 2 광 수신 섬유를 포함할 수 있다. 각각의 광 수신 섬유는 출구 단부 및 입구 단부를 포함할 수 있다. 예를 들어, 광 수신 섬유는 각각 적어도 하나의 입구 면을 갖는 적어도 2개의 광 수신 섬유를 포함할 수 있으며, 여기서 입구 면은 동심으로 또는 서로의 상부에 또는 서로 평행하게 또는 나란히 배열될 수 있다.
조명원은 적어도 하나의 조명 광 빔을 생성하도록 구성될 수 있으며, 여기서 광 조명 섬유는 폴리머 또는 접착제 등과 같은 추가 전송 장치에 부착되어 더 큰 굴절율의 차이를 갖는 인터페이스에서 반사를 감소시킬 수 있다. 예를 들어, 측정 헤드는 추가 광학 요소가 없는 콤팩트 장치일 수 있으며, 여기서 조명원은 전송 장치의 에지에 가능한 한 가깝게 배치될 수 있다. 따라서, 베이스라인은 전송 장치의 직경, 특히 렌즈 직경과 렌즈 및 광원의 하우징의 절반에 가까울 수 있다. 예를 들어, 측정 헤드는 훨씬 더 콤팩트한 장치일 수 있으며, 여기서 미러, 특히 소형 미러는 전송 장치의 전방, 특히 중앙, 예를 들어 기하학적 중심에 위치될 수 있거나, 또는 조명 빔을 빔 경로에 연결하기 위해 전송 장치의 중심에 가깝게 위치될 수 있다. 따라서, 베이스라인은 전송 장치 직경의 절반 미만일 수 있다. 조명원은 베이스라인이 가능한 한 작도록 배열될 수 있다. 조명 광 빔의 전파 방향이 본질적으로 광 축에 평행하도록 그리고 조명원 및/또는 조명 섬유 및 광 축의 출구 면이 작은 베이스라인에 의해 분리되도록 조명원 및/또는 조명 섬유의 출구 면을 배열함으로써, 매우 컴팩트한 장치가 가능하다. 특히 전송 장치의 중심으로부터 조명원 및/또는 조명 섬유의 출구 면까지의 연결 라인을 따라서 전송 장치의 중심으로부터 조명원 및/또는 조명 섬유의 출구 면까지의 거리는 바람직하게 전송 장치의 중심으로부터 전송 장치의 에지까지의 거리의 2.5배 미만, 보다 바람직하게 전송 장치의 중심으로부터 전송 장치의 에지까지의 거리의 1.5배 미만, 가장 바람직하게 전송 장치의 중심으로부터 전송 장치의 에지까지의 거리의 1배 미만일 수 있다. 전송 장치는 임의의 형상을 가질 수 있으며, 특히 비원형 형상이 가능하다. 작은 거리에서, 조명원의 조리개는 작을 수 있고, 베이스라인이 작을 수 있다. 큰 거리에서, 조명원의 조리개는 클 수 있고, 베이스라인은 작을 수 있다. 이것은 삼각측량 방법에서와 반대이며, 큰 거리에서, 큰 베이스라인이 필요하다. 또한, 삼각측량 기반 시스템은 베이스라인의 필요한 공간 범위로 인해 예를 들어 검출기 시스템으로부터 20㎝와 같이 0보다 상당히 큰 최소 검출 범위를 갖는다. 이러한 큰 베이스라인은 물체로부터 산란된 조명된 광이 전송 장치 뒤의 광학 센서의 감광 영역에 도달하지 못하는 결과를 야기할 수 있다. 또한, 삼각측량 기반 시스템에서, 작은 베이스라인을 사용하면 최소 감지 범위가 줄어들지만 동시에 최대 감지 범위도 줄어든다. 또한, 삼각측량 기반 시스템은 복수의 감광 영역 및 센서 신호, 예를 들어 적어도 하나의 검출기 행의 센서 신호를 필요로 한다. 본 발명에 따르면, 세로 좌표(z)의 결정은 감소된 수의 센서 신호, 특히 20개 미만, 바람직하게 10개 미만, 더욱 바람직하게 5개 미만의 센서 신호로 가능하다. 조명원 및 광 수신 섬유는 아래에서 상세하게 설명하는 바와 같이 물체에서 전송 장치 뒤의 측정 헤드로 이동하는 광 빔의 전파 방향으로 배열될 수 있다. 조명 섬유의 출구 면과 조명원과 광 수신 섬유의 입구 면 사이의 측정 헤드의 광 축에 수직인 거리는 전송 장치의 반경보다 작을 수 있다.
측정 헤드는 관심 영역을 스캔하기 위해 측정 헤드를 이동시키도록 구성된 적어도 하나의 액추에이터를 포함할 수 있다. 본 명세서에서 사용되는 용어 "이동"은 측정 헤드를 구동하고 및/또는 측정 헤드를 진동시키는 것을 의미한다. 여기에서 사용된 용어 "액추에이터"는 측정 헤드를 이동시키게 하는 힘을 생성하도록 구성된 임의의 장치를 의미한다. 구체적으로, 액추에이터는 광 수신 섬유에 부착 및/또는 결합 및/또는 연결될 수 있고, 광 수신 섬유가 이동, 특히 진동하도록 하는 힘을 생성하도록 구성될 수 있다. 액추에이터는 광 조명 섬유에 부착 및/또는 결합 및/또는 연결될 수 있으며, 광 조명 섬유를 이동시키게 하는 힘을 생성하도록 구성될 수 있다. 액추에이터는 광 수신 섬유 및/또는 광 조명 섬유의 고유 공진 주파수의 고조파에 대응하는 힘을 생성하도록 구성될 수 있다. 액추에이터는 적어도 하나의 전기기계 액추에이터 및/또는 적어도 하나의 피에조 액추에이터를 포함할 수 있다. 피에조 액추에이터는 적어도 하나의 압전세라믹 액추에이터; 적어도 하나의 압전 액추에이터로 구성되는 그룹으로부터 선택된 적어도 하나의 액추에이터를 포함할 수 있다. 액추에이터는 측정 헤드, 특히 광 조명 섬유 및/또는 광 수신 섬유가 진동하도록 구성될 수 있다. 액추에이터는 선형 스캔 및/또는 방사형 스캔 및/또는 나선형 스캔에서 측정 헤드를 이동하도록 구성될 수 있다. 예를 들어, 액추에이터는 측정 헤드가 상향 및 하향으로 이동하도록 측정 헤드에 힘을 생성하도록 구성될 수 있다. 예를 들어, 액추에이터는 측정 헤드가 미리정의된 반경을 갖는 궤도에서 이동하도록 측정 헤드에 힘을 생성하도록 구성될 수 있다. 반경은 조정할 수 있다. 예를 들어, 액추에이터는 측정 헤드가 교대로 감소하거나 증가하는 반경과 같은 나선형으로 이동하도록 힘을 생성하도록 구성될 수 있다.
본 발명의 추가 측면에서, 적어도 하나의 물체의 위치를 결정하기 위한 키트가 개시된다. 키트는 위에 개시된 실시예들에 따른 및/또는 아래에 더 상세하게 개시된 실시예들 중 하나 이상에 따른 적어도 하나의 측정 헤드를 포함한다. 키트는 적어도 하나의 검출기를 더 포함하며, 상기 검출기는:
- 적어도 2개의 광학 센서 ― 각각의 광학 센서는 적어도 하나의 감광 영역을 가지며, 각 광학 센서는 측정 헤드의 광 수신 섬유 중 적어도 하나를 통과한 광 빔에 의한 각각의 감광 영역의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 설계됨 ―; 및
- 센서 신호로부터 결합된 신호(Q)를 평가함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하도록 구성되는 적어도 하나의 평가 장치를 포함한다.
본 명세서에서 사용되는 바와 같이, "광학 센서"는 일반적으로 적어도 하나의 광 빔에 의해 생성된 조명 및/또는 광 스폿을 검출하기 위한 것과 같이 광 빔을 검출하기 위한 감광 장치를 지칭한다. 본 명세서에서 추가로 사용되는 바와 같이, "감광 영역"은 일반적으로 적어도 하나의 센서 신호가 생성되는 조명에 응답하여 적어도 하나의 광 빔에 의해 외부에서 조명될 수 있는 광학 센서의 영역을 지칭한다. 감광 영역은 특히 각 광학 센서의 표면에 위치될 수 있다. 그러나 다른 실시예도 가능하다. 본 명세서에서 사용된 바와 같이, "각각 적어도 하나의 감광 영역을 갖는 적어도 2개의 광학 센서"라는 용어는 각각 하나의 감광 영역을 갖는 2개의 단일 광학 센서를 갖는 구성 및 적어도 2개의 감광 영역을 갖는 하나의 결합된 광학 센서를 갖는 구성을 지칭한다. 따라서, 용어 "광학 센서"는 또한 하나의 출력 신호를 생성하도록 구성된 감광 장치를 지칭하는 반면, 여기서는 2개 이상의 출력 신호를 생성하도록 구성된 감광 장치, 예를 들어 적어도 하나의 CCD 및/또는 CMOS 장치는 2개 이상의 광학 센서라고 한다. 아래에서 더 상세히 설명되는 바와 같이, 각 광학 센서는, 정확히 하나의 균일한 센서 신호가 전체 광학 센서에 대해 생성되는 조명에 응답하여 조명될 수 있는 정확히 하나의 감광 영역을 제공함으로써 각 광학 센서에 정확히 하나의 감광 영역이 존재하도록 구현될 수 있다. 따라서, 각각의 광학 센서는 단일 영역 광학 센서일 수 있다. 그러나, 단일 영역 광학 센서를 사용하면 검출기 설정이 특히 간단하고 효율적이다. 따라서, 예로서, 각각 정확히 하나의 민감 영역을 갖는 상업적으로 이용 가능한 실리콘 포토다이오드와 같은 상업적으로 이용 가능한 광학 센서가 설정에 사용될 수 있다. 그러나, 다른 실시예도 가능하다. 따라서, 예로서, 본 발명의 맥락에서 2, 3, 4 또는 4개 이상의 광학 센서로 간주되는 2개, 3개, 4개 또는 4개 이상의 감광 영역을 포함하는 광학 장치가 사용될 수 있다. 예를 들어, 광학 장치는 감광 영역의 매트릭스를 포함할 수 있다. 따라서, 예로서, 광학 센서는 픽셀화된 광학 장치의 일부이거나 이를 구성할 수 있다. 예로서, 광학 센서는 픽셀의 매트릭스를 갖는 적어도 하나의 CCD 및/또는 CMOS 장치의 일부이거나 구성할 수 있으며, 각 픽셀은 감광 영역을 형성한다.
광 수신 섬유 각각은 광 빔이 감광 영역에 충돌하도록 적어도 하나의 광 빔을 방출하도록 구성될 수 있다. 예를 들어, 감광 영역 중 적어도 하나가 광 축에 대해 임의의 각도로 배향되는 경우, 광 수신 섬유는 광 빔을 감광 영역으로 안내하도록 구성될 수 있다.
본 명세서에서 추가로 사용되는 바와 같이, "센서 신호"는 일반적으로 광 빔에 의한 조명에 응답하여 광학 센서에 의해 생성된 신호를 지칭한다. 구체적으로, 센서 신호는 적어도 하나의 아날로그 전기 신호 및/또는 적어도 하나의 디지털 전기 신호와 같은 적어도 하나의 전기 신호이거나 이를 포함할 수 있다. 보다 구체적으로, 센서 신호는 적어도 하나의 전압 신호 및/또는 적어도 하나의 전류 신호이거나 이를 포함할 수 있다. 보다 구체적으로, 센서 신호는 적어도 하나의 광전류를 포함할 수 있다. 또한, 원시(raw) 센서 신호가 사용될 수 있거나, 검출기, 광학 센서 또는 임의의 다른 요소가 센서 신호를 처리 또는 전처리하도록 구성될 수 있으며, 이에 따라 필터링 등에 의한 전처리와 같은 센서 신호로도 사용될 수 있는 2차 센서 신호를 생성할 수 있다.
광학 센서는 자외선, 가시 광선 또는 적외선 스펙트럼 범위 중 하나 이상에서 민감할 수 있다. 구체적으로, 광학 센서는 500㎚ 내지 780㎚, 가장 바람직하게 650㎚ 내지 750㎚ 또는 690㎚ 내지 700㎚의 가시 스펙트럼 범위에서 민감할 수 있다. 구체적으로, 광학 센서는 근적외선 영역에서 민감할 수 있다. 구체적으로, 광학 센서는 실리콘 포토다이오드가 특히 700㎚ 내지 1000㎚ 범위에서 적용 가능한 근적외선 영역의 부분에서 민감할 수 있다. 특히 광학 센서는 특히 780㎚ 내지 3.0 마이크로미터 범위에서 적외선 스펙트럼 범위에 민감할 수 있다. 예를 들어, 광학 센서는 각각 독립적으로 포토다이오드, 포토셀, 포토컨덕터, 포토트랜지스터 또는 이들의 임의의 조합으로 이루어진 그룹으로부터 선택된 적어도 하나의 요소이거나 이를 포함할 수 있다. 예를 들어, 광학 센서는 CCD 센서 요소, CMOS 센서 요소, 포토다이오드, 포토셀, 포토컨덕터, 포토트랜지스터 또는 이들의 임의의 조합으로 구성된 그룹으로부터 선택된 적어도 하나의 요소이거나 이를 포함할 수 있다. 다른 유형의 감광성 요소가 사용될 수 있다. 아래에서 더 상세히 설명되는 바와 같이, 감광성 요소는 일반적으로 전체 또는 부분적으로 유기 재료로 제조될 수 있고 및/또는 전체 또는 부분적으로 유기 재료로 제조될 수 있다. 가장 일반적으로, 아래에 더 자세히 설명되는 바와 같이, 예를 들어 무기 반도체 포토다이오드와 같은 시중에서 입수 가능한 포토다이오드와 같은 하나 이상의 포토다이오드가 사용될 수 있다.
적어도 하나의 광학 센서가 각각의 광 수신 섬유의 출구 단부에 배열될 수 있다. 대안적으로, 적어도 2개 이상의 광 수신 섬유가 동일한 광학 센서를 사용할 수 있다. 광 수신 섬유의 단부에 있는 광학 센서는, 예를 들어 광학 센서를 향해 광 수신 섬유를 빠져 나가는 광 빔의 휘도 파워의 적어도 80%, 바람직하게 적어도 90%, 보다 바람직하게 적어도 99%가 적어도 하나의 광학 센서에 충돌하도록 배열될 수 있다. 물체로부터 측정 헤드로 이동하는 광 빔이 광 수신 섬유에 충돌하는 전송 장치에 대한 위치는 높은 동적 범위를 갖는 결합된 신호(Q)를 얻기 위해 최적화될 수 있다.
광 조명 섬유의 조명원 및/또는 출구 면 및 광 수신 섬유들 중 하나 또는 둘 모두의 입구 면은 전송 장치의 광 축으로부터 상대적인 공간 오프셋으로 배열될 수 있다. 특히, 조명 섬유의 조명원 및/또는 출구 면 및 광 수신 섬유 중 하나 또는 둘 모두의 입구 면은 광 축으로부터 상이한 공간 오프셋으로 배열될 수 있다. 이러한 배열은 결합된 신호(Q)의 경향을 향상시키고, 그에 따라 거리 측정의 정확성을 높일 수 있다. 특히, 공간 오프셋이 증가하면, Q 대 거리 다이어그램의 기울기가 증가하여, 유사한 거리를 더 정확하게 구별할 수 있다. 예를 들어, 광 수신 섬유 들 중 하나 또는 둘 모두의 조명원 및 입구 면 중 하나는 광 축 상에 배열될 수 있고, 다른 하나는 광 축으로부터 이격되어 배열될 수 있다. 예를 들어, 광 수신 섬유들 중 하나 또는 둘 모두의 조명원 및 입구 면 모두는 적어도 하나의 상이한 거리, 특히 광 축에 수직으로 광 축으로부터 이격되어 배치될 수 있다. 예를 들어, 적어도 2개의 광 수신 섬유는 광 축으로부터 상이한 거리에 배열될 수 있다. 광 수신 섬유는 조명원 및/또는 광학 센서를 이동하지 않고 조명원과 광학 센서 사이의 광 축에 수직인 실제 거리에 비해 더 큰 거리를 모방하도록 구성될 수 있다.
광학 센서 및/또는 광 수신 섬유 중 적어도 하나의 입구 면은 초점을 벗어나 위치될 수 있다. 본 명세서에서 사용된 바와 같이, "초점"이라는 용어는 일반적으로 광 빔, 특히 전송 장치 또는 전송 장치의 초점 거리에 의해 발생하는 물체의 한 지점에서 방출되는 적어도 하나의 광 빔의 혼동의 원의 최소 범위 중 하나 또는 둘 다를 지칭한다. 본 명세서에서 사용된 바와 같이, "혼동의 원(circle of confusion)"이라는 용어는 전송 장치에 의해 집속된 광 빔의 광선의 원뿔에 의해 발생하는 광 스폿을 의미한다. 혼란의 원은 전송 장치의 초점 길이(f), 물체에서 전송 장치까지의 길이 방향 거리, 전송 장치의 출사 동공의 직경, 전송 장치에서 감광 영역까지의 길이 방향 거리, 전송 장치에서 물체의 이미지까지의 거리에 따라 달라질 수 있다. 예를 들어, 가우시안 빔의 경우, 혼동의 원의 직경은 가우스 빔의 폭일 수 있다. 특히, 검출기로부터 무한 거리에 위치하거나 배치된 포인트형 물체의 경우, 전송 장치는 물체로부터의 광 빔을 전송 장치의 초점 거리에 있는 초점 포인트로 초점을 맞추도록 구성될 수 있다. 검출기로부터 무한 거리에 위치하거나 위치된 비-포인트형 물체의 경우, 전송 장치는 물체의 적어도 한 초점으로부터 전송 장치의 초점 길에어서 초점 평면까지 광 빔을 초점을 맞추도록 구성될 수 있다. 측정 헤드로부터 무한 거리에 위치하지 않거나 배치되지 않은 포인트형 물체의 경우, 혼동의 원은 적어도 하나의 세로 좌표에서 최소 범위를 가질 수 있다. 측정 헤드로부터 무한 거리에 위치하지 않거나 배치되지 않은 비-포인트형 물체의 경우, 물체의 적어도 한 포인트로부터의 광 빔의 혼동의 원은 적어도 하나의 세로 좌표에서 최소 범위를 가질 수 있다. 본 명세서에서 사용되는 바와 같이, "초점을 벗어난 위치"라는 용어는 일반적으로 전송 장치 또는 전송 장치의 초점 길이에 의해 야기되는 광 빔의 혼동의 원의 최소 범위 이외의 위치를 의미한다. 특히, 초점 또는 혼동의 원의 최소 범위는 세로 좌표(lfocus)에 있을 수 있는 반면, 각 광학 센서의 위치 및/또는 광 수신 섬유 중 적어도 하나의 입구 면은 lfocus와 상이한 세로 좌표(lsenser)를 가질 수 있다. 예를 들어, 세로 좌표(lsenser)는, 길이 방향에서, 세로 좌표(lfocus)보다 전송 장치의 위치에 가깝게 위치되거나, 또는 세로 좌표(lfocus)보다 전송 장치의 위치로부터 멀리 배치될 수 있다. 따라서, 세로 좌표(lsenser) 및 세로 좌표(lfocus)는 전송 장치로부터 상이한 거리에 위치될 수 있다. 예를 들어, 광학 센서 및/또는 광 수신 섬유 중 적어도 하나의 입구 면은 길이 방향에서 혼동의 원의 최소 범위로부터 초점 길이의 ±2%, 바람직하게 초점 길이의 ±10%, 가장 바람직하게 초점 길이의 ±20%만큼 이격될 수 있다. 예를 들어, 전송 장치의 초점 거리는 20㎜일 수 있고 그리고 세로 좌표(lsenser)는 19.5㎜일 수 있는데, 즉, 센서 및/또는 광 수신 섬유 중 적어도 하나의 입구 면이 97% 초점 길이에 위치될 수 있으며, 그 결과 lsenser는 초점 길이의 2.5%만큼 초점에서 이격된다.
예를 들어, 광 수신 섬유 중 적어도 하나의 입구 면은 결합된 신호(Q)의 거리 의존성에 대한 변동이 최대가 되도록 배열될 수 있으며, 이는 결합된 신호(Q)의 최대 동적 범위와 동일하다. 이러한 이론에 얽매이지 않고, 동적 범위를 최대화하기 위한 실질적인 근사는 거리 의존성에 대한 혼동 변동의 순환을 최대화하는 것이다. 작고 큰 물체 거리에서 혼동의 원 반경의 지수는 작고 큰 물체 거리에서 결합된 신호의 지수에 대한 실질적인 근사치이다. 특히, 광 수신 섬유 중 적어도 하나의 입구 면은 큰 물체 거리에서 결합된 신호(Qfar)와 작은 물체 거리에서 결합된 신호(Qclose)는 최대 변동을 가질 것이며,

여기에서,  는 작은 물체 거리에서 혼동의 원의 변경이고,
는 작은 물체 거리에서 혼동의 원의 변경이고,  는 큰 물체 거리에서 혼동의 원의 반경이며, zo는 광 수신 광 섬유 중 적어도 하나의 입구 면과 물체 사이의 검출 가능한 거리 범위이며, zs는 전송 장치와 광 수신 섬유 중 적어도 하나의 입구 면 사이의 거리이며, zi는 물체(zo)의 위치에 따라 좌우되는 전송 장치 뒤의 초점 이미지의 위치이다. 광 수신 섬유의 최적 위치, 특히 물체로부터 측정 헤드로 이동하는 광 빔이 광 수신 섬유에 충돌하는 수신 광 섬유의 단부의 위치는 다음 단계를 사용하여 조정할 수 있다: i) 가장 먼 물체 거리의 초점 지점에 광 수신 섬유 중 적어도 하나의 입구 면을 위치시키는 단계; ii) 초점 지점으로부터의 거리(Δ)가 혼동 변동의 최상의 원 및 가장 큰 범위를 제공하도록, 광학 센서 및/또는 광 수신 섬유 중 적어도 하나의 입구 면을 초점 지점을 벗어나, 특히 광학 축을 따라 또는 광학 축에 대해서 이동시키는 단계를 포함하며,
는 큰 물체 거리에서 혼동의 원의 반경이며, zo는 광 수신 광 섬유 중 적어도 하나의 입구 면과 물체 사이의 검출 가능한 거리 범위이며, zs는 전송 장치와 광 수신 섬유 중 적어도 하나의 입구 면 사이의 거리이며, zi는 물체(zo)의 위치에 따라 좌우되는 전송 장치 뒤의 초점 이미지의 위치이다. 광 수신 섬유의 최적 위치, 특히 물체로부터 측정 헤드로 이동하는 광 빔이 광 수신 섬유에 충돌하는 수신 광 섬유의 단부의 위치는 다음 단계를 사용하여 조정할 수 있다: i) 가장 먼 물체 거리의 초점 지점에 광 수신 섬유 중 적어도 하나의 입구 면을 위치시키는 단계; ii) 초점 지점으로부터의 거리(Δ)가 혼동 변동의 최상의 원 및 가장 큰 범위를 제공하도록, 광학 센서 및/또는 광 수신 섬유 중 적어도 하나의 입구 면을 초점 지점을 벗어나, 특히 광학 축을 따라 또는 광학 축에 대해서 이동시키는 단계를 포함하며,  이며, Osize는 광 수신 섬유의 적어도 하나의 입구 면에서 스폿 크기이며, f는 전송 장치의 초점 길이이며, f#은 전송 장치의 F 번호이며, z0 far는 가장 먼 물체 거리이다.
이며, Osize는 광 수신 섬유의 적어도 하나의 입구 면에서 스폿 크기이며, f는 전송 장치의 초점 길이이며, f#은 전송 장치의 F 번호이며, z0 far는 가장 먼 물체 거리이다.
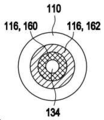
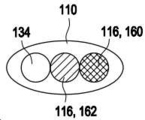
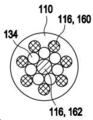
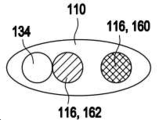
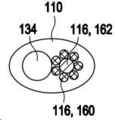
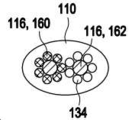
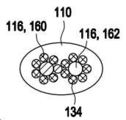
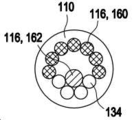
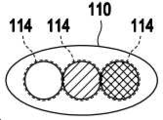
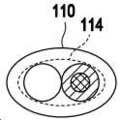
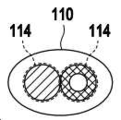
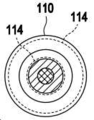
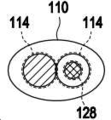
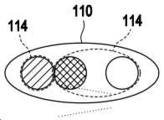
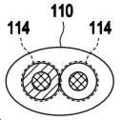
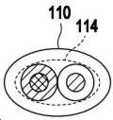
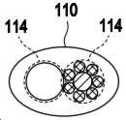
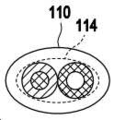
위에서 설명된 바와 같이, 측정 헤드는 적어도 2개의 광 수신 섬유, 특히 적어도 2개의 수신 섬유를 포함하며, 여기서 제 1 광 섬유는 물체에서 측정 헤드로 전파하는 광 빔의 적어도 일부를 제 1 광학 센서에 제공하도록 구성되고 그리고 제 2 광 섬유는 물체에서 측정 헤드로 전파되는 광 빔의 적어도 일부를 제 2 광학 센서로 제공하도록 구성된다. 측정 헤드는 복수의 광 수신 섬유를 포함할 수 있으며, 각각의 광 수신 섬유는 물체로부터 측정 헤드로 전파하는 광 빔의 적어도 일부를 광학 센서 중 하나에 제공하도록 구성된다. 광 수신 섬유의 각각의 입구 면의 각각의 기하학적 중심은 세로 좌표(lcenter,i)에 배열될 수 있으며, 여기서 i는 각각의 광 섬유의 수를 나타낸다. 검출기는 정확히 2개의 광학 센서를 포함하며 및/또는 측정 헤드는 각각 입구 면을 포함하는 정확히 2개의 수신 섬유를 포함할 수 있다. 검출기는 2개 이상의 광학 센서를 포함하며 및/또는 측정 헤드는 2개 이상의 수신 섬유를 포함할 수 있다. 수신 섬유는 적어도 하나의 제 1 입구 면을 갖는 적어도 하나의 제 1 수신 섬유와, 적어도 하나의 제 2 입구 면을 갖는 적어도 하나의 제 2 수신 섬유를 포함할 수 있다. 제 1 입구 면, 특히 기하학적 중심은 제 1 세로(lcenter,1)에 배열될 수 있고, 제 2 입구 면, 특히 기하학적 중심은 제 2 세로 좌표(lcenter,2)에 배열될 수 있으며, 여기서 제 1 세로 좌표와 제 2 세로 좌표는 상이하다. 예를 들어, 제 1 입구 단부와 제 2 입구 단부는 광 축의 방향으로 오프셋된 상이한 평면에 위치될 수 있다. 제 1 입구 단부는 제 2 입구 단부의 전방에 배치될 수 있다. 제 1 입구 단부와 제 2 입구 단부의 상대적 거리는 예를 들어 초점 길이 또는 물체 거리에 따라 좌우될 수 있다. 수신 섬유의 입구 면의 세로 좌표도 동일할 수 있다. 구체적으로, 광 수신 섬유의 입구 면의 세로 좌표는 동일할 수 있지만, 수신 섬유의 입구 면은 상이한 공간 오프셋에 의해 광 축으로부터 이격될 수 있다. 제 1 광 수신 섬유 및 제 2 광 수신 섬유는 공통 중심 축을 갖도록 배열될 수 있다. 제 1 광 수신 섬유와 제 2 광 수신 섬유는 동심으로 배열될 수 있다. 제 1 광 수신 섬유는 제 2 광 수신 섬유를 둘러쌀 수 있다. 예를 들어, 제 1 입구 면과 제 2 입구 면은 원 형상일 수 있으며, 여기서 제 1 입구 면은 제 1 반경을 갖는 원일 수 있고, 제 2 입구 면은 제 1 반경과 다른 제 2 반경을 갖는 원일 수 있다. 추가적으로 또는 대안적으로, 제 1 입구 면은 제 2 입구 면으로부터 이격될 수 있다. 제 1 입구 면은 제 2 입구 면의 전방에 배열될 수 있고, 제 2 입구 면으로부터 50㎜ 이하, 바람직하게 15㎜ 이하 만큼 이격될 수 있다. 제 1 광학 센서 및 제 2 광학 센서의 상대 거리는 예를 들어 초점 길이 또는 물체 거리에 따라 좌우될 수 있다.
수신 섬유의 각 입구 면의 각 기하학적 중심은, 빔 경로의 광 축 또는 수신 섬유의 각 입구 면이 위치되어 있는 각 빔 경로와 같은 전송 장치의 광 축으로부터 이격될 수 있다. 정확히 2개의 수신 섬유를 포함하는 측정 헤드의 경우, 각각 하나의 입구 면을 포함하고, 2개 이상의 수신 섬유를 포함하는 측정 헤드의 경우, 수신 섬유는 제 1 공간 오프셋만큼 광 축으로부터 이격된 적어도 하나의 제 1 입구 면을 포함하는 적어도 하나의 제 1 수신 섬유와, 제 2 공간 오프셋만큼 광 축으로부터 이격된 적어도 하나의 제 2 입구 면을 포함하는 적어도 하나의 제 2 수신 섬유를 포함할 수 있으며, 여기서 제 1 공간 오프셋 및 제 2 공간 오프셋은 상이할 수 있다. 예를 들어, 제 1 및 제 2 공간 오프셋은 적어도 1.2배, 보다 바람직하게 적어도 1.5배, 보다 바람직하게 적어도 2배 차이가 날 수 있다. 공간 오프셋은 또한 0일 수 있거나, 광 수신 섬유의 입구 면의 세로 좌표 및/또는 단면이 상이하다면 음의 값을 가정할 수 있다.
광 수신 섬유들은 제 1 단면을 갖는 적어도 하나의 제 1 수신 섬유와, 제 2 단면을 갖는 적어도 하나의 제 2 수신 섬유를 포함할 수 있다. 용어 "단면"은 수신 섬유의 연장 방향에 수직인 영역을 의미한다. 2개 이상의 수신 섬유를 포함하는 측정 헤드의 경우, 광 수신 섬유의 제 1 그룹 또는 광 수신 섬유 중 적어도 하나가 제 1 단면을 형성할 수 있으며, 여기서 광 수신 섬유의 그룹 또는 다른 광 수신 섬유 중 적어도 하나가 제 2 단면을 형성할 수 있다. 제 1 단면과 제 2 단면은 상이할 수 있다. 특히, 제 1 단면과 제 2 단면이 일치하지 않는다. 따라서, 제 1 수신 섬유 및 제 2 수신 섬유의 단면은 형상 또는 내용 중 하나 이상이 상이할 수 있다. 예를 들어, 제 1 단면은 제 2 단면보다 작을 수 있다. 예를 들어, 제 1 단면 및 제 2 단면은 모두 원의 형상을 가질 수 있다. 제 1 입구 면의 제 1 원의 반경은 제 2 입구 면의 제 2 원의 대응하는 반경보다 작을 수 있다. 구체적으로, 제 1 단면의 직경은 제 2 단면의 직경보다 작을 수 있다. 다시, 대안적으로, 예로서, 제 1 단면은 제 1 등가 직경을 가질 수 있고, 제 2 단면은 제 2 등가 직경을 가질 수 있으며, 여기서 제 1 등가 직경은 제 2 등가 직경보다 작다. 수신 섬유의 입구 면의 공간 오프셋 및/또는 세로 좌표가 상이하다면 단면은 일치할 수 있다.
평가 장치는 센서 신호의 결합된 신호(Q)를 평가함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하도록 구성된다. 본 명세서에서 일반적으로 사용되는 바와 같이, 용어 "결합"은 일반적으로 신호와 같은 2개 이상의 구성요소가 적어도 하나의 병합된 결합된 신호를 형성하기 위해 수학적으로 병합된 것 및/또는 적어도 하나의 비교 신호 또는 비교 결과를 형성하기 위해서 비교된 것 중 하나 이상인 임의의 연산을 지칭할 수 있다. 본 명세서에서 사용되는 용어 "결합된 신호(Q)"는 센서 신호를 결합함으로써, 특히 센서 신호를 나누거나, 센서 신호의 배수를 나누거나, 또는 센서 신호의 선형 조합을 나누는 것 중 하나 이상에 의해 생성된 신호를 의미한다. 특히, 결합된 신호는 몫 신호일 수 있다. 결합된 신호(Q)는 다양한 수단을 사용하여 결정될 수 있다. 예로서, 결합된 신호를 유도하기 위한 소프트웨어 수단, 결합된 신호를 유도하기 위한 하드웨어 수단, 또는 둘 모두가 사용될 수 있고, 평가 장치에서 구현될 수 있다. 따라서, 예로서, 평가 장치는 적어도 하나의 나눗셈장치를 포함할 수 있으며, 나눗셈장치는 몫 신호를 유도하도록 구성된다. 나눗셈장치는 소프트웨어 나눗셈장치 또는 하드웨어 나눗셈장치 중 하나 또는 둘 모두로 완전히 또는 부분적으로 구현될 수 있다.
평가 장치는 센서 신호를 나누는 것, 센서 신호의 배수를 나누는 것, 센서 신호의 선형 조합을 나누는 것 중 하나 이상에 의해 결합된 신호(Q)를 유도하도록 구성될 수 있다. 평가 장치는 길이 좌표를 결정하기 위해 결합된 신호(Q)와 길이 좌표 사이에 적어도 하나의 사전결정된 관계를 사용하도록 구성될 수 있다. 예를 들어, 평가 장치는 하기의 수학식에 의해 결합된 신호(Q)를 유도하도록 구성된다.

여기서 x와 y는 가로 좌표이고, A1과 A2는 센서 위치에서 광 수신 섬유를 통과한 광 빔의 빔 프로파일 영역이고, E(x, y, z0)는 물체 거리(z0)에서 주어진 빔 프로파일을 나타낸다. 영역(A1)과 영역(A2)은 상이할 수 있다. 특히, A1과 A2는 합동이 아니다. 따라서, A1과 A2는 형상 또는 내용 중 하나 이상이 상이할 수 있다. 빔 프로파일은 광 빔의 단면일 수 있다. 빔 프로파일은 사다리꼴 빔 프로파일; 삼각형 빔 프로파일; 원뿔형 빔 프로파일; 가우시안 빔 프로파일의 선형 조합으로 구성되는 그룹에서 선택될 수 있다. 일반적으로, 빔 프로파일은 휘도 L(z0) 및 빔 형상 S(x, y; z0), E(x, y, zo)=L·S에 따라 달라진다. 따라서, 결합된 신호를 유도하여, 광도와 독립적인 세로 좌표를 결정할 수 있다. 또한, 결합된 신호를 사용하면 물체 크기와 독립적인 거리(z0)를 결정할 수 있다. 따라서, 결합된 신호는 물체의 재료 특성 및/또는 반사 특성 및/또는 산란 특성과 관계없이 그리고 제조 정밀도, 열, 물, 먼지, 렌즈의 손상 등의 변경과 관계없이 거리(z0)의 결정을 허용한다.
각각의 센서 신호는 광 수신 섬유를 통과한 광 빔의 빔 프로파일의 적어도 하나의 영역의 적어도 하나의 정보를 포함할 수 있다. 여기에서 사용된 용어 "빔 프로파일의 영역"은 일반적으로 결합된 신호(Q)를 결정하는 데 사용되는 센서 위치에서 빔 프로파일의 임의의 영역을 나타낸다. 광 수신 섬유의 감광 영역 및/또는 입구 면은, 제 1 센서 신호가 빔 프로파일의 제 1 영역의 정보를 포함하고 그리고 제 2 센서 신호가 빔 프로파일의 제 2 영역의 정보를 포함하도록 배열될 수 있다. 빔 프로파일의 제 1 영역 및 빔 프로파일의 제 2 영역은 인접하거나 중첩되는 영역 중 하나 또는 둘 모두일 수 있다. 빔 프로파일의 제 1 영역과 빔 프로파일의 제 2 영역은 면적이 일치하지 않을 수 있다.
평가 장치는 빔 프로파일의 제 1 영역 및 빔 프로파일의 제 2 영역을 결정 및/또는 선택하도록 구성될 수 있다. 빔 프로파일의 제 1 영역은 본질적으로 빔 프로파일의 에지 정보를 포함할 수 있고, 빔 프로파일의 제 2 영역은 본질적으로 빔 프로파일의 중심 정보를 포함할 수 있다. 빔 프로파일은 중심, 즉 빔 프로파일의 최대 값 및/또는 빔 프로파일의 플래토의 중심점 및/또는 광 스폿의 기하학적 중심, 및 중심으로부터 연장되는 하강 에지를 가질 수 있다. 제 2 영역은 단면의 내부 영역을 포함할 수 있고, 제 1 영역은 단면의 외부 영역을 포함할 수 있다. 본 명세서에서 사용되는 바와 같이, "본질적으로 중심 정보"라는 용어는 일반적으로 중심 정보의 비율, 즉 중심에 대응하는 강도 분포의 비율에 비해 에지 정보의 낮은 비율, 즉 에지에 대응하는 강도 분포의 비율을 지칭한다. 바람직하게, 중심 정보는 10% 미만, 보다 바람직하게 5% 미만의 에지 정보 비율을 가지며, 가장 바람직하게 중심 정보는 에지 내용을 포함하지 않는다. 본 명세서에서 사용되는 용어 "본질적으로 에지 정보"는 일반적으로 에지 정보의 비율에 비교해서 낮은 비율의 중심 정보를 의미한다. 에지 정보는 특히 중심 및 에지 영역으로부터의 전체 빔 프로파일의 정보를 포함할 수 있다. 에지 정보는 10% 미만, 바람직하게 5% 미만의 중심 정보 비율을 가질 수 있으며, 보다 바람직하게 에지 정보는 중심 내용을 포함하지 않는다. 빔 프로파일의 적어도 하나의 영역은 그것이 중심에 가깝거나 중심 주위에 있고 본질적으로 중심 정보를 포함하는 경우 빔 프로파일의 제 2 영역으로서 결정 및/또는 선택될 수 있다. 빔 프로파일의 적어도 하나의 영역은 단면의 하강 에지의 적어도 일부를 포함하는 경우 빔 프로파일의 제 1 영역으로서 결정 및/또는 선택될 수 있다. 예를 들어, 단면의 전체 영역이 제 1 영역으로 결정될 수 있다. 빔 프로파일의 제 1 영역은 영역(A2)이고, 빔 프로파일의 제 2 영역은 영역(A1)일 수 있다.
에지 정보는 빔 프로파일의 제 1 영역에 있는 광자의 수에 관한 정보를 포함할 수 있고, 중심 정보는 빔 프로파일의 제 2 영역에 있는 광자의 수에 관한 정보를 포함할 수 있다. 평가 장치는 빔 프로파일의 통합 영역을 결정하는 데 적합할 수 있다. 평가 장치는 제 1 영역을 적분 및/또는 합산하여 에지 정보를 결정하도록 구성될 수 있다. 평가 장치는 제 2 영역을 통합 및/또는 합산하여 중심 정보를 결정하도록 구성될 수 있다. 예를 들어, 빔 프로파일은 사다리꼴 빔 프로파일일 수 있고, 평가 장치는 사다리꼴의 적분을 결정하도록 구성될 수 있다. 또한, 사다리꼴 빔 프로파일이 가정될 수 있을 때, 에지 및 중심 신호의 결정은 에지의 기울기 및 위치의 결정, 중심 플래토의 높이의 결정 및 기하학적 고려에 의해 에지 및 중심 신호를 유도하는 것과 같은 사다리꼴 빔 프로파일의 특성을 사용하는 동등한 평가로 대체될 수 있다.
추가적으로 또는 대안적으로, 평가 장치는 광 스폿의 적어도 하나의 슬라이스 또는 컷으로부터 중심 정보 또는 에지 정보 중 하나 또는 둘 다를 결정하도록 구성될 수 있다. 이것은 예를 들어, 결합된 신호(Q)의 면적 적분을 슬라이스 또는 컷을 따라 라인 정수로 대체함으로써 실현될 수 있다. 정확도를 높이기 위해, 광 스폿을 통해 여러 슬라이스 또는 컷을 사용하고 평균화할 수 있다. 타원형 스폿 프로파일의 경우, 여러 슬라이스 또는 컷에 대한 평균을 내면 개선된 거리 정보가 발생될 수 있다.
평가 장치는 에지 정보와 중심 정보를 나누는 것, 에지 정보와 중심 정보의 배수를 나누는 것, 에지 정보와 중심 정보의 선형 조합을 나누는 것 중 하나 이상에 의해 결합된 신호(Q)를 유도하도록 구성될 수 있다. 따라서, 본질적으로 광자 비율이 방법의 물리적 기반으로 사용될 수 있다.
본 명세서에서 추가로 사용되는 바와 같이, 용어 "평가 장치"는 일반적으로 바람직하게 적어도 하나의 데이터 처리 장치를 사용하고, 보다 바람직하게 적어도 하나의 프로세서 및/또는 적어도 하나의 주문형 집적 회로를 사용하여 명명된 작업을 수행하도록 구성된 임의의 장치를 지칭한다. 따라서, 예로서, 적어도 하나의 평가 장치는 다수의 컴퓨터 명령을 포함하는 소프트웨어 코드가 저장된 적어도 하나의 데이터 처리 장치를 포함할 수 있다. 평가 장치는 명명된 작업 중 하나 이상을 수행하기 위한 하나 이상의 하드웨어 요소를 제공할 수 있고 및/또는 명명된 동작 중 하나 이상을 수행하기 위해 소프트웨어가 실행되는 하나 이상의 프로세서를 제공할 수 있다.
본 발명의 일 실시예에 있어서, 검출기는:
- 제 1 감광 영역을 갖는 적어도 하나의 제 1 광학 센서 ― 상기 제 1 광학 센서는 광 수신 섬유 중 하나를 통과한 광 빔에 의한 제 1 감광 영역의 조명에 응답하여 적어도 하나의 제 1 센서 신호를 생성하도록 구성될 수 있음 ―; 및
- 제 2 감광 영역을 갖는 적어도 하나의 제 2 광학 센서 ― 제 2 광학 센서는 광 수신 섬유 중 다른 하나를 통과한 광 빔에 의한 제 2 감광 영역의 조명에 응답하여 적어도 하나의 제 2 센서 신호를 생성하도록 구성될 수 있음 ― 을 포함할 수 있다.
평가 장치는 제 1 및 제 2 센서 신호를 평가함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하도록 구성될 수 있다.
광 수신 섬유의 입구 면은 크기 및/또는 형상이 동일할 수 있거나, 또는 상이할 수 있다. 예를 들어, 제 1 광 수신 섬유의 제 1 입구 면은 제 2 광 수신 섬유의 제 2 입구 면보다 작을 수 있다. 제 1 입구 면은 제 2 감광 영역보다 작을 수 있다. 여기에 사용된 용어 "보다 작다"는 제 1 입구 면의 표면적이 적어도 0.9배 만큼, 예를 들어 예를 들어 적어도 0.7배 또는 심지어 적어도 0.5배와 같이 제 2 입구 면의 표면적보다 작다는 사실을 의미한다. 예를 들어, 제 1 입구 면과 제 2 입구 면 양자는 정사각형 또는 직사각형의 형상을 가질 수 있으며, 여기서 제 1 입구 면의 정사각형 또는 직사각형의 측면 길이는 제 2 입구 면의 정사각형 또는 직사각형의 대응 측면 길이보다 작다. 대안적으로, 예로서, 제 1 입구 면과 제 2 입구 면 양자는 원의 형상을 가질 수 있으며, 여기서 제 1 입구 면의 직경은 제 2 입구 면의 직경보다 작다. 다시, 대안적으로, 예로서, 제 1 입구 면은 제 1 등가 직경을 가질 수 있고, 제 2 입구 면은 제 2 등가 직경을 가질 수 있으며, 여기서 제 1 등가 직경은 제 2 등가 직경보다 작다. 제 2 입구 면은 제 1 입구 면보다 클 수 있다. 따라서, 예로서, 제 2 입구 면은 제 1 입구 면보다 적어도 2배, 보다 바람직하게 적어도 3배, 가장 바람직하게 적어도 5배 더 클 수 있다. 제 1 입구 면은 특히 작은 입구 면일 수 있으며, 그 결과 바람직하게 광 빔이 이 입구 면을 완전히 조명한다. 따라서, 전형적인 광학 구성에 적용할 수 있는 예로서, 제 1 입구 면은 1㎟ 내지 150㎟의 표면적을 가질 수 있고, 보다 바람직하게 10㎟ 내지 100㎟의 표면적을 가질 수 있다. 특히 입구 면은 넓은 영역일 수 있다. 따라서, 바람직하게 검출기의 측정 범위 내에서, 광 스폿은 제 2 입구 면 내에 완전히 위치될 수 있으며, 그 결과 광 스폿은 제 2 입구 면의 경계 내에 완전히 위치된다. 예를 들어 광학 설정에 적용할 수 있는 예로서, 제 2 입구 면은 160㎟ 내지 1000㎟의 표면적, 보다 바람직하게 200㎟ 내지 600㎟의 표면적을 가질 수 있다.
제 1 입구 면은 특히 광 빔의 전파 방향에서 제 2 입구 면과 중첩될 수 있다. 광 빔은 제 1 입구 면, 및 완전히 또는 부분적으로 제 2 입구 면의 양자를 조명할 수 있다. 따라서, 예를 들어, 검출기의 광 축에 위치된 물체에서 보았을 때, 제 1 입구 면은 물체에서 보았을 때 제 1 입구 면이 제 2 입구 면 내에 완전히 위치되도록 제 2 입구 면의 전방에 위치될 수 있다. 이 물체로부터의 광 빔이 제 1 및 제 2 입구 면을 향해 전파될 때, 광 빔은 제 1 입구 면을 완전히 조명하고 그리고 제 2 입구 면에 광 스폿을 생성할 수 있으며, 여기서 제 1 입구 면에 의해 생성된 그림자는 광 스폿 내에 위치된다. 그러나, 다른 실시예도 가능하다는 점에 유의해야 한다.
제 1 및 제 2 입구 면은 특히 검출기의 하나의 그리고 동일한 빔 경로에 선형으로 배열될 수 있다. 본 명세서에서 사용된 용어 "선형으로"는 일반적으로 입구 면이 하나의 축을 따라 배열되는 것을 의미한다. 따라서, 예로서, 제 1 및 제 2 입구 면 양자는 검출기의 광 축 상에 위치될 수 있다. 구체적으로, 제 1 및 제 2 입구 면은 검출기의 광 축에 대해 동심으로 배열될 수 있다.
제 1 입구 면은 제 2 입구 면의 전방에 배치될 수 있다. 따라서, 예를 들어, 제 1 입구 면은 제 2 입구 면의 표면에 간단하게 배치될 수 있다. 추가적으로 또는 대안적으로, 제 1 입구 면은 제 1 입구 면의 표면적 제곱근의 5배 이하 만큼 제 2 입구 면으로부터 이격될 수 있다. 추가적으로 또는 대안적으로, 제 1 입구 면은 제 2 입구 면의 전방에 배치될 수 있고, 제 2 입구 면으로부터 50㎜ 이하, 바람직하게 15㎜ 이하 만큼 이격될 수 있다.
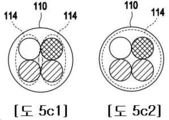
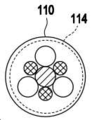
일 예에서, 측정 헤드는:
- 제 1 단면을 갖는 적어도 하나의 제 1 수신 섬유 ― 상기 제 1 수신 섬유는 물체로부터 측정 헤드로 전파하는 광 빔의 적어도 일부를 광학 센서의 적어도 하나의 광학 센서에 제공하도록 구성됨 ―; 및
- 제 2 단면을 갖는 적어도 하나의 제 2 수신 섬유 ― 제 2 수신 섬유는 물체로부터 측정 헤드로 전파하는 광 빔의 적어도 일부를 광학 센서의 적어도 하나의 다른 광학 센서에 제공하도록 구성됨 ―를 포함한다.
제 1 단면은 제 2 단면보다 작을 수 있다.
물체로부터 측정 헤드로 전파하는 광 빔은 구체적으로 제 1 단면 및/또는 제 2 단면을 완전히 조명하며, 그 결과 제 1 단면 및/또는 제 2 단면은 광 빔 내에 완전히 위치될 수 있으며, 예를 들어 광 빔의 폭은 제 1 수신 섬유의 제 1 단면 및/또는 제 2 수신 섬유의 제 2 단면보다 더 크다. 반대로, 바람직하게 물체로부터 측정 헤드로 전파하는 광 빔은 구체적으로 제 1 단면 및/또는 제 2 단면을 부분적으로 조명할 수 있다. 광 빔에 초점을 맞추거나 초점을 흐리게 하는 효과를 갖는 적어도 하나 이상의 적절한 렌즈들 또는 요소들, 예를 들어 적절한 전송 장치가 물체로부터 측정 헤드로 전파되는 광 빔의 전파 방향으로 수신 섬유의 입구 면의 전방에 배열될 수 있다.
위에서 설명한 바와 같이, 제 1 단면은 제 2 단면보다 작을 수 있다. 여기에 사용된 용어 "보다 작다"는 제 1 단면이 적어도 0.9배 만큼, 예를 들어 예를 들어 적어도 0.7배 또는 심지어 적어도 0.5배와 같이 제 2 단면의 표면적보다 작다는 사실을 의미한다. 예를 들어, 제 1 단면 및 제 2 단면 양자는 원의 형상을 가질 수 있으며, 여기서 제 1 단면의 직경은 제 2 단면의 직경보다 작다. 위에서 설명한 바와 같이, 제 2 단면은 제 1 단면보다 클 수 있다. 따라서, 예로서, 제 2 단면은 제 1 단면보다 적어도 2배, 보다 바람직하게 적어도 3배, 가장 바람직하게 적어도 5배 만큼 더 클 수 있다.
제 1 단면은 특히 물체로부터 검출기로 전파하는 광 빔의 전파 방향에서 제 2 단면과 중첩될 수 있다. 물체로부터 검출기로 전파되는 광 빔은 제 1 단면 그리고 완전히 또는 부분적으로 제 2 단면 양자를 조명할 수 있다. 따라서, 예를 들어, 검출기의 광 축에 위치된 물체에서 볼 때, 제 1 단면은 제 2 단면의 중심에 위치되며, 그 결과 제 1 단면과 제 2 단면이 동심이 될 수 있다. 그러나, 다른 실시예도 가능하다는 점에 유의해야 한다.
제 1 및 제 2 수신 섬유의 입구 면은 구체적으로 동일한 세로 좌표로 배열될 수 있거나, 상이한 세로 좌표로 배열될 수 있다. 따라서, 예로서, 제 1 및 제 2 입구 면 양자는 검출기의 광 축 상에 위치될 수 있다. 특히, 제 1 및 제 2 입구 면은 검출기의 광 축에 대해 동심으로 배열될 수 있다. 예를 들어, 제 1 입구 면은 제 2 입구 면의 전방에 배치될 수 있다. 예를 들어, 제 1 입구 면은 제 1 입구 면의 단면의 제곱근의 5배 이하 만큼 제 2 입구 면으로부터 이격될 수 있다. 추가적으로 또는 대안적으로, 제 1 입구 면은 제 2 입구 면의 전방에 배열될 수 있고, 제 2 입구 면으로부터 50㎜ 이하, 바람직하게 15㎜ 이하 만큼 이격될 수 있다.
2개의 광학 센서의 선형 배열에 대한 대안으로, 광학 센서는 검출기의 상이한 빔 경로에 배열될 수 있다. 광 수신 섬유는 제 1 광 빔 및 제 2 광 빔을 생성하도록 구성될 수 있다. 제 1 광 빔 및 제 2 광 빔은 상이한 투과도로 생성될 수 있다. 제 1 광학 센서는 제 1 광 빔에 의한 제 1 감광 영역의 조명에 응답하여 제 1 센서 신호를 생성하도록 구성될 수 있다. 제 2 광학 센서는 제 2 광 빔에 의한 제 2 감광 영역의 조명에 응답하여 제 2 센서 신호를 생성하도록 구성될 수 있다. 예를 들어, 위에서 설명한 바와 같이, 광 수신 섬유는, 입사 광 빔이 제 1 입사각에서 제 1 섬유로 그리고 제 1 입사각과 상이한 제 2 입사각에서 제 2 섬유로 충돌할 수 있도록, 배열될 수 있는 적어도 하나의 다중갈래 광 수신 섬유를 포함할 수 있으며, 그 결과 투과도는 제 1 광 빔, 이 경우에는 제 1 투과 광 빔 그리고 제 2 광 빔, 이 경우에는 제 2 투과 광 빔에 대해서 상이하다. 제 1 및 제 2 광학 센서 중 하나는 제 1 섬유의 출구 단부에 배열될 수 있고, 다른 광학 센서는 제 2 섬유의 출구 단부에 배열될 수 있다.
평가 장치는 특히 제 1 및 제 2 센서 신호를 나누거나, 제 1 및 제 2 센서 신호의 배수를 나누거나, 또는 제 1 및 제 2 센서 신호의 선형 조합을 나눔으로써 결합된 신호(Q)를 유도하도록 구성될 수 있다. 예를 들어, Q는 간단히 Q=s1/s2 또는 Q=s2/s1로 결정될 수 있으며, s1은 제 1 센서 신호를 나타내고, s2는 제 2 센서 신호를 나타낸다. 추가적으로 또는 대안적으로, Q는 Q=a·s1/b·s2 또는 Q=b·s2/a·s1로 결정될 수 있으며, a 및 b는 예를 들어 사전결정되거나 결정될 수 있는 실수이다. 추가적으로 또는 대안적으로, Q는 Q=(a·s1+b·s2)/(c·s1+d·s2)로 결정될 수 있으며, a, b, c 및 d는 예를 들어 사전결정되거나 결정될 수 있는 실수이다. 후자의 간단한 예로서, Q는 Q=s1(s1+s2)로 결정될 수 있다. 다른 결합된 또는 몫 신호가 가능하다.
전형적으로, 위에서 설명한 설정에서, Q는 물체의 세로 좌표의 및/또는 광 스폿의 직경 또는 등가 직경과 같은 광 스폿의 크기의 단조로운 함수이다. 따라서, 예로서, 특히 선형 광학 센서가 사용되는 경우, 몫 Q=s1/s2는 광 스폿의 크기의 단조 감소 함수이다. 이러한 이론에 얽매이지 않고, 이는 위에서 설명한 설정에서, 검출기에 도달하는 광의 양이 감소하기 때문에 제 1 신호(s1)와 제 2 신호(s2)가 광원까지의 거리가 증가함에 따라 제곱 함수로 감소한다는 사실 때문이라고 믿어진다. 그러나, 여기에서, 실험에서 사용된 광학 설정에서, 이미지 평면의 광 스폿이 커져서 더 넓은 영역에 퍼지기 때문에, 제 1 신호(s1)는 제 2 신호(s2)보다 더 빠르게 감소한다. 따라서, 제 1 및 제 2 센서 신호의 몫은 제 1 및 제 2 감광 영역에서 광 빔의 직경 또는 광 스폿의 직경이 증가함에 따라 지속적으로 감소한다. 또한, 몫은 광 빔의 총 파워가 제 1 센서 신호와 제 2 센서 신호 모두에서 인자를 형성하기 때문에 주로 광 빔의 총 파워와 독립적이다. 결과적으로, 몫(Q)은 제 1 및 제 2 센서 신호와 광 빔의 크기 또는 직경 사이에 고유하고 명확한 관계를 제공하는 2차 신호를 형성할 수 있다. 한편, 광 빔의 크기 또는 직경은 입사 광 빔이 검출기를 향해 전파되는 물체와 검출기 자체 사이의 거리에 따라 달라지는 데, 즉, 물체의 세로 좌표에 따라, 제 1 및 제 2 센서 신호와 세로 좌표 사이의 고유하고 명확한 관계가 존재할 수 있다. 후자의 경우, 예를 들어 국제 공개 팜플렛 제 WO 2014/097181 A1 호를 참조 바란다. 사전결정된 관계는, 제 1 및 제 2 센서 신호 또는 물체의 세로 좌표의 함수로서 파생된 2차 신호, 또는 양자를 측정하는 측정과 같은 경험적 측정에 의해, 가우시안 광 빔의 선형 조합을 가정하는 것과 같은 분석적 고려 사항에 의해 결정될 수 있다.
종래 기술 문헌 국제 공개 팜플렛 제 WO 2014/097181 A1 호에 포함된 기술적 과제를 고려할 때, 특히 FiP 효과를 생성하는 데 필요한 기술적 노력의 관점에서 볼 때, 본 발명은 구체적으로 비-FiP 광학 센서를 사용하여 실현될 수 있음에 유의해야 한다. 사실, FiP 특성을 갖는 광학 센서는 일반적으로 초점의 각 센서 신호에서 강한 피크를 나타내기 때문에, FiP 센서를 광학 센서로 사용하는 본 발명에 따른 검출기의 측정 범위는 2개의 위치 사이에서 그리고 제 1 및 제 2 광학 센서가 광 빔의 초점을 맞추는 범위로 제한될 수 있다. 그러나, 선형 광학 센서, 즉 FiP 효과를 나타내지 않는 광학 센서를 사용할 때, 본 발명의 설정으로 이 문제는 일반적으로 회피될 수 있다. 결과적으로, 제 1 및 제 2 광학 센서는 각각 적어도 측정 범위 내에서 선형 신호 특성을 가질 수 있으며, 그 결과 각각의 제 1 및 제 2 센서 신호는 각각의 광학 장치의 총 조명 파워에 의존할 수 있으며, 조명의 광 스폿의 직경에 영향을 받지 않을 수 있다. 그러나, 다른 실시예도 또한 가능하다는 점에 유의해야 한다.
제 1 및 제 2 광학 센서는 각각 구체적으로 반도체 센서, 바람직하게 무기 반도체 센서, 보다 바람직하게 포토다이오드 및 가장 바람직하게 실리콘 포토다이오드일 수 있다. 따라서, 복잡하고 고가의 FiP 센서와 반대로, 본 발명은 상업적으로 입수 가능한 무기 포토다이오드, 즉 하나의 작은 포토다이오드와 하나의 대면적 포토다이오드를 사용함으로써 간단하게 실현될 수 있다. 따라서, 본 발명의 설정은 저렴하고 비용이 적게 드는 방식으로 실현될 수 있다.
구체적으로, 제 1 및 제 2 광학 센서는 각각 독립적으로, 적외선 스펙트럼 범위, 바람직하게 780㎚ 내지 3.0 마이크로미터 범위에서 민감하고 및/또는 가시 스펙트럼 범위, 바람직하게 380㎚ 내지 780㎚ 범위에서 민감한 무기 포토다이오드이거나 이를 포함할 수 있다. 구체적으로, 제 1 및 제 2 광학 센서는 실리콘 포토다이오드가 특히 700㎚ 내지 1000㎚ 범위에서 적용되는 근적외선 영역의 부분에 민감할 수 있다. 제 1 광학 센서에 대해, 제 2 광학 센서에 대해 또는 제 1 및 제 2 광학 센서 양자에 대해 사용될 수 있는 적외선 광학 센서는 시판되는 독일 데-67056 루드비스하펜 암 루인에 소재하는 "trinamiX GmbH"로부터의 브랜드 이름 HertzstueckTM으로 상업적으로 입수 가능한 적외선 광학 센서와 같은 상업적으로 입수 가능한 적외선 광학 센서일 수 있다. 따라서, 예로서, 제 1 광학 센서, 제 2 광학 센서, 또는 제 1 및 제 2 광학 센서 양자는 고유 광기전 유형의 적어도 하나의 광학 센서, 보다 바람직하게 Ge 포토다이오드, InGaAs 포토다이오드, 확장 InGaAs 포토다이오드, InAs 포토다이오드, InSb 포토다이오드, HgCdTe 포토다이오드로 구성되는 그룹으로부터 선택된 적어도 하나의 반도체 포토다이오드를 포함할 수 있다. 추가적으로 또는 대안적으로, 제 1 광학 센서, 제 2 광학 센서, 또는 제 1 및 제 2 광학 센서 양자는 외부 광기전 유형의 적어도 하나의 광학 센서, 보다 바람직하게 Ge:Au 포토다이오드, Ge:Hg 포토다이오드, Ge:Cu 포토다이오드, Ge:Zn 포토다이오드, Si:Ga 포토다이오드, Si:As 포토다이오드로 구성되는 그룹으로부터 선택된 적어도 하나의 반도체 포토다이오드를 포함할 수 있다. 추가적으로 또는 대안적으로, 제 1 광학 센서, 제 2 광학 센서, 또는 제 1 및 제 2 광학 센서 양자는 적어도 하나의 볼로미터, 바람직하게 VO 볼로미터와 비정질 Si 볼로미터로 구성되는 그룹으로부터 선택된 볼로미터를 포함할 수 있다.
제 1 및 제 2 광학 센서 각각은 구체적으로 각각 단일 감광 영역을 갖는 균일한 센서일 수 있다. 따라서, 제 1 및 제 2 광학 센서는 특히 비-픽셀화된 광학 센서일 수 있다.
위에서 설명한 바와 같이, 제 1 및 제 2 센서 신호를 평가함으로써, 검출기는 전체 물체 또는 물체의 하나 이상의 부분의 세로 좌표를 결정하는 옵션을 포함하여 물체의 적어도 하나의 세로 좌표를 결정하도록 활성화될 수 있다. 추가로, 그러나, 하나 이상의 가로 좌표 및/또는 회전 좌표를 포함하는 물체의 다른 좌표는 검출기에 의해, 특히 평가 장치에 의해 결정될 수 있다. 따라서, 예로서, 하나 이상의 추가적인 횡단 센서가 물체의 적어도 하나의 가로 좌표를 결정하기 위해 사용될 수 있다. 다양한 센서는 국제 공개 팜플렛 제 WO 2014/097181 A1 호에 개시된 횡단 센서 및/또는 사분면 다이오드, CCD 또는 CMOS 칩 등과 같은 다른 위치 감지 장치(PSD)와 같이 일반적으로 당 업계에 알려져 있다. 이들 장치는 또한 일반적으로 본 발명에 따른 검출기로 구현될 수 있다. 예를 들어, 광 빔의 일부는 적어도 하나의 빔 분할 요소에 의해 검출기 내에서 분할될 수 있다. 예를 들어, 분할 부분은 CCD 또는 CMOS 칩 또는 카메라 센서와 같은 횡단 센서를 향해 안내될 수 있으며, 횡단 센서에서 분리된 부분에 의해 생성된 광 스폿의 횡단 위치가 결정될 수 있으며, 이에 의해 물체의 적어도 하나의 가로 좌표를 결정한다. 결과적으로, 본 발명에 따른 검출기는 단순한 거리 측정 장치와 같은 1차원 검출기이거나, 2차원 검출기 또는 심지어 3차원 검출기로 구현될 수 있다. 또한, 상술한 바와 같이 또는 아래에서 추가로 설명하는 바와 같이, 풍경이나 환경을 1차원 방식으로 스캔함으로써, 또한 3차원 이미지를 생성할 수 있다. 결과적으로, 본 발명에 따른 검출기는 구체적으로 1차원 검출기, 2차원 검출기 또는 3차원 검출기 중 하나일 수 있다. 평가 장치는 물체의 적어도 하나의 가로 좌표(x, y)를 결정하도록 추가로 구성될 수 있다.
광학 센서는 이중-셀 또는 사분면 다이오드의 부분 다이오드일 수 있고 및/또는 적어도 하나의 CMOS 센서를 포함할 수 있다. 예를 들어, 광학 센서는 CMOS 센서를 포함할 수 있다. 평가 장치는 CMOS 센서의 센서 영역을 적어도 2개의 서브 영역으로 분할하도록 구성될 수 있다. 구체적으로, 평가 장치는 CMOS 센서의 센서 영역을 적어도 하나의 좌측 부분과 적어도 하나의 우측 부분 및/또는 적어도 하나의 상부 부분 및 적어도 하나의 하부 부분 및/또는 적어도 하나의 내부 부분과 적어도 하나의 외부 부분으로 분할하도록 구성될 수 있다. 평가 장치는 적어도 2개의 서브 영역의 센서 신호로부터 결합된 신호(Q)를 평가함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하도록 구성될 수 있다. 적어도 하나의 CMOS 센서를 사용하면 물체를 조명하기 위해 조명원의 움직임을 허용할 수 있다. 특히, 적어도 하나의 광 조명 섬유 및 광 수신 섬유의 독립적인 이동이 가능할 수 있다. 이중-셀 또는 사분면 다이오드의 부분 다이오드로서 배열된 광학 센서를 사용하는 경우, 광 수신 섬유와 광 조명 섬유는 특히 고정적으로 상호 연결될 수 있다. 광 조명 섬유를 사용하는 조명에 추가적으로 또는 대안적으로, 물체는 임의의 조명원으로부터 생성된 광 빔에 의해 조명될 수 있다. 특히, 물체의 조명은 광 수신 섬유와 독립적으로 수행될 수 있다.
예를 들어, 검출기는 광학 센서의 매트릭스를 갖는 적어도 하나의 센서 요소를 포함할 수 있고, 광학 센서는 각각 감광 영역을 가지며, 여기서 각 광학 센서는 하나 이상의 광 수신 섬유를 통과한 광 빔에 의한 감광 영역의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 구성될 수 있다. 검출기는 검출기의 상이한 빔 경로에 배열된 2개의 센서 소자, 특히 적어도 하나의 제 1 센서 소자 및 적어도 하나의 제 2 센서 소자를 포함할 수 있다. 제 1 및 제 2 센서 요소 중 하나는 제 1 섬유의 출구 단부에 배열될 수 있고, 다른 센서 요소는 제 2 섬유의 출구 단부에 배열될 수 있다.
평가 장치는,
a) 가장 높은 센서 신호를 갖는 적어도 하나의 광학 센서를 결정하고, 적어도 하나의 중심 신호를 형성하는 것;
b) 매트릭스의 광학 센서의 센서 신호를 평가하고, 적어도 하나의 합산 신호를 형성하는 것;
c) 중심 신호와 합산 신호를 결합하여 적어도 하나의 결합된 신호를 결정하는 것; 및
d) 결합된 신호를 평가함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하는 것에 의해
센서 신호를 평가하도록 구성될 수 있다.
본 명세서에서 사용되는 용어 "센서 요소"는 일반적으로 적어도 하나의 파라미터를 감지하도록 구성된 장치 또는 복수의 장치의 조합을 지칭한다. 본 경우에, 파라미터는 구체적으로 광학 파라미터일 수 있고, 센서 요소는 특히 광학 센서 요소일 수 있다. 센서 요소는 단일체의 단일 장치로서 또는 몇몇 장치의 조합으로서 형성될 수 있다. 본 명세서에서 더 사용되는 바와 같이, 용어 "매트릭스"는 일반적으로 사전결정된 기하학적 순서로 복수의 요소의 배열을 지칭한다. 아래에서 추가로 상세하게 설명하는 바와 같이, 매트릭스는 특히 하나 이상의 행과 하나 이상의 열을 갖는 직사각형 매트릭스이거나 이를 포함할 수 있다. 행과 열은 특히 직사각형 방식으로 배열될 수 있다. 그러나, 직사각형이 아닌 배열과 같은 다른 배열도 가능하다는 점을 유의해야 한다. 예를 들어, 요소가 중심점을 중심으로 동심원 또는 타원으로 배열되는 원형 배열도 또한 가능하다. 예를 들어, 매트릭스는 픽셀의 단일 행일 수 있다. 다른 배열이 가능하다.
매트릭스의 광학 센서는 특히 크기, 감도 및 기타 광학적, 전기적 및 기계적 특성 중 하나 이상이 동일할 수 있다. 매트릭스의 모든 광학 센서의 감광 영역은 특히 공통 평면에 위치할 수 있으며, 공통 평면은 광 수신 섬유를 통과한 광 빔이 공통 평면 상에 광 스폿을 생성할 수 있도록 우선적으로 물체를 향해 있다.
상술한 종래 기술 문헌 중 하나 이상, 예를 들어 국제 공개 팜플렛 제 WO 2012/110924 A1 호 또는 제 WO 2014/097181 A1 호에 더 자세히 설명된 바와 같이, 전형적으로, 광 스폿의 직경, 빔 웨이스트 또는 등가 직경과 같은 광 스폿의 크기와 광 빔이 검출기를 향해 전파되는 물체의 세로 좌표 사이에 사전결정된 또는 결정 가능한 관계가 존재한다. 이 이론에 얽매이지 않고, 광 스폿은 2개의 측정 변수: 또한 중심 신호라고도 하는 광 스폿의 중심에 또는 중심에 가까운 작은 측정 패치에서 측정된 측정 신호와, 중심 신호를 갖거나 또는 중심 신호를 갖지 않고 광 스폿 상에 통합된 적분 또는 합산 신호에 의해 특징화될 수 있다. 빔이 넓어지거나 집중될 때 변하지 않는 특정 총 파워를 갖는 광 빔의 경우, 합산 신호는 광 스폿의 스폿 크기와 독립적이어야 하며, 따라서 그들 각 측정 범위 내의 적어도 선형 광학 센서가 사용되는 경우, 물체와 검출기 사이의 거리와 독립적이어야 한다. 그러나, 중심 신호는 스폿 크기에 따라 좌우된다. 따라서, 중심 신호는 일반적으로 광 빔이 초점을 맞출 때 증가하고, 광 빔이 초점이 맞지 않을 때 감소한다. 따라서, 중심 신호와 합산 신호를 비교함으로써, 광 빔에 의해 생성된 광 스폿의 크기, 그리고 그에 따라 물체의 세로 좌표에 대한 정보의 항목이 생성될 수 있다. 예를 들어, 중심 신호와 합산 신호의 비교는 중심 신호와 합산 신호로부터 결합된 신호(Q)를 형성하고, 세로 좌표를 유도하기 위해서 세로 좌표와 합산 신호 사이의 사전결정된 또는 결정 가능한 관계를 사용하여 수행될 수 있다.
광학 센서의 매트릭스의 사용은 복수의 장점과 이점을 제공한다. 따라서, 센서 요소의 매트릭스의 광학 센서의 감광 영역의 공통 평면과 같은 센서 요소의 광 빔에 의해 생성된 광 스폿의 중심은 물체의 횡단 위치에 따라 달라질 수 있다. 광학 센서의 매트릭스를 이용함으로써, 본 발명에 따른 검출기는 이들 조건의 변화에 적응할 수 있고, 따라서 센서 신호를 비교함으로써 광 스폿의 중심을 단순히 결정할 수 있다. 결과적으로, 본 발명에 따른 검출기는 그 자체로 중심 신호를 선택하고, 합산 신호를 결정할 수 있으며, 이 두 신호로부터 물체의 세로 좌표에 대한 정보를 포함하는 결합된 신호를 유도할 수 있다. 결합된 신호를 평가함으로써, 그에 따라 물체의 세로 좌표를 결정할 수 있다. 따라서, 광학 센서의 매트릭스를 사용하면 물체의 위치와 관련하여, 특히 물체의 횡단 위치와 관련하여 상당한 유연성을 제공한다.
센서 신호를 생성하는 적어도 하나의 광학 센서의 횡단 위치와 같은 광학 센서의 매트릭스 상의 광 스폿의 횡단 위치는 추가 정보 항목으로 사용될 수도 있으며, 물체의 횡단 위치 상의 적어도 하나의 정보 항목이 예를 들어 국제 공개 팜플렛 제 WO 2014/198629 A1 호에 개시되어 있는 바와 같이 추가 정보 항목으로부터 유도될 수 있다. 추가적으로 또는 대안적으로, 아래에서 추가로 상세하게 설명하는 바와 같이, 본 발명에 따른 검출기는 적어도 하나의 세로 좌표에 추가하여 물체의 적어도 하나의 가로 좌표를 검출하기 위한 적어도 하나의 추가 횡단 검출기를 포함할 수 있다.
결과적으로, 본 발명에 따르면, 용어 "중심 신호"는 일반적으로 빔 프로파일의 본질적으로 중심 정보를 포함하는 적어도 하나의 센서 신호를 지칭한다. 본 명세서에서 사용되는 용어 "가장 높은 센서 신호"는 관심 영역에서 국부적 최대값 또는 최대값 중 하나 또는 양자를 의미한다. 예를 들어, 중심 신호는 전체 매트릭스의 또는 매트릭스 내의 관심 영역의 광학 센서에 의해 생성된 복수의 센서 신호 중 가장 높은 센서 신호를 갖는 적어도 하나의 광학 센서의 신호일 수 있으며, 여기서는 관심 영역은 매트릭스의 광학 센서에 의해 생성된 이미지 내에서 사전결정되거나 결정 가능할 수 있다. 중심 신호는 단일 광학 센서로부터, 또는 아래에서 더 자세히 설명되는 바와 같이 광학 센서의 그룹으로부터 발생할 수 있으며, 후자의 경우 예를 들어, 광학 센서의 그룹의 센서 신호는 중심 신호를 결정하기 위해 합산, 통합 또는 평균화될 수 있다. 중심 신호가 발생하는 광학 센서의 그룹은 가장 높은 센서 신호를 갖는 실제 광학 센서로부터 사전결정된 거리 미만의 광학 센서와 같은 인접 광학 센서의 그룹일 수 있거나, 또는 생성하는 가장 높은 센서 신호로부터의 사전결정된 범위 내에 있는 센서 신호를 생성하는 광학 센서의 그룹일 수 있다. 중심 신호가 발생하는 광학 센서의 그룹은 최대 동적 범위를 허용하기 위해 가능한 한 크게 선택할 수 있다. 평가 장치는 복수의 센서 신호, 예를 들어 가장 높은 센서 신호를 갖는 광학 센서 주변의 복수의 광학 센서의 통합에 의해 중심 신호를 결정하도록 구성될 수 있다. 예를 들어, 빔 프로파일은 사다리꼴 빔 프로파일일 수 있고, 평가 장치는 사다리꼴의 적분, 특히 사다리꼴의 플래토의 적분을 결정하도록 구성될 수 있다.
유사하게, 용어 "합계 신호"는 일반적으로 빔 프로파일의 에지 정보를 본질적으로 포함하는 신호를 의미한다. 예를 들어, 합산 신호는 센서 신호를 합산하거나, 센서 신호를 적분하거나, 또는 전체 매트릭스 또는 매트릭스 내의 관심 영역의 센서 신호를 평균화함으로써 유도될 수 있으며, 여기서 관심 영역은 매트릭스의 광학 센서에 의해 생성된 이미지 내에서 사전결정되거나 결정 가능할 수 있다. 센서 신호를 합산, 적분 또는 평균화할 때 센서 신호가 생성되는 실제 광학 센서는 합산, 적분 또는 평균에서 제외되거나, 또는 대안적으로 합산, 적분 또는 평균에 포함될 수 있다. 평가 장치는 전체 매트릭스 또는 매트릭스 내의 관심 영역의 신호를 적분함으로써 합산 신호를 결정하도록 구성될 수 있다. 예를 들어, 빔 프로파일은 사다리꼴 빔 프로파일일 수 있고, 평가 장치는 전체 사다리꼴의 적분을 결정하도록 구성될 수 있다. 또한, 사다리꼴 빔 프로파일을 가정할 때, 에지 및 중심 신호의 결정은 에지의 기울기 및 위치, 및 중앙 플래토의 높이의 결정과 같은 사다리꼴 빔 프로파일의 속성을 사용하고 그리고 기하학적 고려사항에 의한 에지 및 중앙 신호를 유도하는 동등한 평가로 대체될 수 있다.
추가적으로 또는 대안적으로, 평가 장치는 광 스폿의 적어도 하나의 슬라이스 또는 컷으로부터 중심 정보 또는 에지 정보 중 하나 또는 둘 다를 결정하도록 구성될 수 있다. 이것은 예를 들어 결합된 신호(Q)의 면적 적분을 슬라이스 또는 컷을 따라 라인 적분으로 대체함으로써 실현될 수 있다. 정확도를 높이기 위해, 광 스폿을 통해 몇개의 슬라이스 또는 컷을 사용하고 평균화할 수 있다. 타원형 스폿 프로파일의 경우, 몇개의 슬라이스 또는 컷에 대한 평균을 내면 거리 정보가 향상될 수 있다.
유사하게, 본 명세서에서 추가로 사용되는 용어 "결합된 신호"는 일반적으로 중심 신호와 합산 신호를 결합하여 생성되는 신호를 지칭한다. 구체적으로, 조합은: 중심 신호와 합산 신호의 몫을 형성하거나 그 반대로 형성하는 것; 중심 신호의 배수와 합산 신호의 배수 또는 그 반대의 몫을 형성하거나 그 반대로 형성하는 것; 중심 신호의 선형 조합과 합산 신호의 선형 조합의 몫을 형성하거나 그 반대로 형성하는 것 중 하나 이상을 포함할 수 있다. 추가적으로 또는 대안적으로, 결합된 신호는 중심 신호와 합산 신호 사이의 비교에 대한 정보의 적어도 하나의 항목을 포함하는 임의의 신호 또는 신호 조합을 포함할 수 있다.
광 빔은 중심 신호가 생성되는 적어도 하나의 광학 센서를 완전히 조명하며, 그 결과 중심 신호가 발생하는 적어도 하나의 광학 센서가 광 빔 내에 완전히 위치되며, 광 빔의 폭은 센서 신호가 발생하는 적어도 하나의 광학 센서의 감광 영역보다 크다. 반대로, 우선적으로, 광 빔은 매트릭스보다 작은 전체 매트릭스 상에 광 스폿을 생성하여 광 스폿이 매트릭스 내에 완전히 위치하도록 할 수 있다. 이 상황은 이후에 보다 상세하게 설명하는 바와 같이 적절한 전송 장치를 이용함으로써 광 빔에 초점을 맞추거나 초점을 흐리게 하는 효과를 갖는 하나 이상의 적절한 렌즈 또는 요소를 선택함으로써 광학장치의 분야의 숙련자에 의해 쉽게 조정될 수 있다. 본 명세서에서 추가로 사용되는 바와 같이, "광 스폿"은 일반적으로 광 빔에 의한 물품, 영역 또는 물체의 가시적이거나 검출 가능한 원형 또는 비원형 조명을 의미한다.
위에서 설명한 바와 같이, 중심 신호는 일반적으로 광 스폿의 중심에서 광학 센서로부터의 센서 신호와 같은 단일 센서 신호일 수 있거나, 광 스폿의 중심에서 광학 센서로부터 발생하는 센서 신호 또는 전술한 가능성 중 하나 이상에 의해 유도된 센서 신호를 처리하여 유도된 2차 센서 신호의 조합과 같은 복수의 센서 신호의 조합일 수 있다. 센서 신호의 비교가 종래의 전자장치에 의해 상당히 간단하게 구현되거나, 또는 소프트웨어에 의해 전체 또는 부분적으로 수행될 수 있기 때문에, 중심 신호의 결정은 전자적으로 수행될 수 있다. 구체적으로, 중심 신호는, 가장 높은 센서 신호; 가장 높은 센서 신호로부터 사전결정된 공차 범위 내에 있는 센서 신호의 그룹의 평균; 가장 높은 센서 신호를 갖는 광학 센서를 포함하는 광학 센서의 그룹 및 이웃하는 광학 센서의 사전결정된 그룹으로부터의 센서 신호의 평균; 가장 높은 센서 신호를 갖는 광학 센서를 포함하는 광학 센서의 그룹 및 이웃하는 광학 센서의 사전결정된 그룹으로부터의 센서 신호의 합; 가장 높은 센서 신호로부터 사전결정된 공차 범위 내에 있는 센서 신호의 그룹의 합; 사전결정된 임계치를 초과하는 센서 신호의 그룹의 평균; 사전결정된 임계치를 초과하는 센서 신호의 그룹의 합; 가장 높은 센서 신호를 갖는 광학 센서를 포함하는 광학 센서의 그룹 및 이웃하는 광학 센서의 사전결정된 그룹으로부터의 센서 신호의 적분; 가장 높은 센서 신호로부터 사전결정된 공차 범위 내에 있는 센서 신호의 그룹의 적분; 사전결정된 임계치를 초과하는 센서 신호의 그룹의 적분으로 구성된 그룹으로부터 선택될 수 있다.
위에서 설명한 바와 같이, 광학 센서의 원시 센서 신호는 평가 또는 그로부터 파생된 2차 센서 신호에 사용될 수 있다. 본 명세서에서 사용되는 용어 "2 차 센서 신호"는 일반적으로 전자 신호, 보다 바람직하게 아날로그 및/또는 디지털 신호와 같은 신호를 의미하며, 이는 필터링, 평균화, 복조 등에 의해서와 같이 하나 이상의 원시 신호를 처리함으로써 획득된다. 따라서, 이미지 처리 알고리즘은 매트릭스의 전체 센서 신호 또는 매트릭스 내의 관심 영역으로부터 2차 센서 신호를 생성하는 데 사용될 수 있다. 특히, 평가 장치와 같은 검출기는 광학 센서의 센서 신호를 변환하도록 구성되어 2차 광학 센서 신호를 생성할 수 있으며, 여기서 평가 장치는 2차 광학 센서 신호를 이용함으로써 단계 a) 내지 d)를 수행하도록 구성된다. 센서 신호의 변환은 구체적으로: 필터링; 적어도 하나의 관심 영역의 선택; 센서 신호에 의해 생성된 이미지와 적어도 하나의 오프셋 사이의 차이 이미지를 형성; 센서 신호에 의해 생성된 이미지를 반전시켜 센서 신호를 반전; 상이한 시간에 센서 신호에 의해 생성된 이미지 사이의 차이 이미지를 형성; 배경 보정; 색상 채널로의 분해; 색조로의 분해; 포화; 밝기 채널; 주파수 분해; 특이 값 분해; 캐니(Canny) 에지 검출기를 적용하는 것; 가우시안(Gaussian) 필터의 라플라시안(Laplacian)을 적용하는 것; 가우시안(Gaussian) 필터의 디퍼런스(Difference)를 적용하는 것; 소벨(Sobel) 연산자를 적용하는 것; 라플라스(Laplace) 연산자를 적용하는 것; 샤르(Scharr) 연산자를 적용하는 것; 프레윗(Prewitt) 연산자를 적용하는 것; 로버츠(Roberts) 연산자를 적용하는 것; 커쉬(Kirsch) 연산자를 적용하는 것; 고역 통과 필터를 적용하는 것; 저역 통과 필터를 적용하는 것; 푸리에(Fourier) 변환을 적용하는 것; 라돈(Radon) 변환을 적용하는 것; 허프(Hough) 변환을 적용하는 것; 웨이블릿(wavelet) 변환을 적용하는 것; 임계 값; 이진 이미지를 생성하는 것으로 구성된 그룹에서 선택된 적어도 하나의 변환을 포함할 수 있다. 관심 영역은 사용자에 의해 수동으로 결정될 수 있거나, 또는 광학 센서에 의해 생성된 이미지 내의 물체를 인식하는 것과 같이 자동으로 결정될 수 있다. 예를 들어, 차량, 사람 또는 다른 유형의 사전결정된 물체는 이미지 내의, 즉, 광학 센서에 의해 생성된 센서 신호의 전체 범위 내에서 자동 이미지 인식에 의해 결정될 수 있으며, 관심 영역은 물체가 관심 영역 내에 위치되도록 선택될 수 있다. 이 경우, 세로 좌표의 결정과 같은 평가는 단지 관심 영역에 대해서만 수행될 수 있다. 그러나, 다른 구현도 가능하다.
위에서 설명한 바와 같이, 광 스폿의 중심의 검출, 즉 중심 신호의 및/또는 중심 신호가 발생하는 적어도 하나의 광학 센서의 검출은 하나 이상의 소프트웨어 알고리즘을 사용하여 전체적으로 또는 부분적으로 전자적으로 또는 전체적으로 또는 부분적으로 수행될 수 있다. 특히, 평가 장치는 적어도 하나의 가장 높은 센서 신호를 검출하기 위한 및/또는 중심 신호를 형성하기 위한 적어도 하나의 중심 검출기를 포함할 수 있다. 중심 검출기는 구체적으로 완전히 또는 부분적으로 소프트웨어로 구현될 수 있고 및/또는 완전히 또는 부분적으로 하드웨어로 구현될 수 있다. 중심 검출기는 적어도 하나의 센서 요소에 완전히 또는 부분적으로 통합될 수 있고 및/또는 센서 요소와 독립적으로 완전히 또는 부분적으로 구현될 수 있다.
위에서 설명한 바와 같이, 합산 신호는 매트릭스의 모든 센서 신호로부터, 관심 영역 내의 센서 신호로부터, 또는 중심 신호에 기여하는 광학 센서로부터 발생하는 센서 신호가 제외된 이러한 가능성 중 하나로부터 유도될 수 있다. 모든 경우에, 세로 좌표를 결정하기 위해 중심 신호와 안정적으로 비교할 수 있는 신뢰할 수 있는 합산 신호가 생성될 수 있다. 일반적으로, 합산 신호는, 매트릭스의 모든 센서 신호에 대한 평균; 매트릭스의 모든 센서 신호의 합; 매트릭스의 모든 센서 신호의 적분; 중심 신호에 기여하는 해당 광학 센서로부터의 센서 신호를 제외한 매트릭스의 모든 센서 신호에 대한 평균; 중심 신호에 기여하는 해당 광학 센서로부터의 센서 신호를 제외한 매트릭스의 모든 센서 신호의 합; 중심 신호에 기여하는 해당 광학 센서로부터의 센서 신호를 제외한 매트릭스의 모든 센서 신호의 적분; 가장 높은 센서 신호를 갖는 광학 센서로부터 사전결정된 범위 내에 있는 광학 센서의 센서 신호의 합; 가장 높은 센서 신호를 갖는 광학 센서로부터 사전결정된 범위 내에 있는 광학 센서의 센서 신호의 적분; 가장 높은 센서 신호를 갖는 광학 센서로부터 사전결정된 범위 내에 위치된 광학 센서의 특정 임계치를 초과하는 센서 신호의 합; 가장 높은 센서 신호를 갖는 광학 센서로부터 사전결정된 범위 내에 위치된 광학 센서의 특정 임계치를 초과하는 센서 신호의 적분으로 구성된 그룹으로부터 선택될 수 있다. 그러나, 다른 옵션이 있다.
합산은 소프트웨어에서 완전히 또는 부분적으로 수행될 수 있고 및/또는 하드웨어에서 완전히 또는 부분적으로 수행될 수 있다. 합산은 일반적으로, 전형적으로 검출기에 쉽게 구현될 수 있는 순전히 전자적 수단에 의해 가능하다. 따라서, 전자장치의 기술 분야에서, 합산 장치는 일반적으로 아날로그 신호와 디지털 신호의 2 이상의 전기 신호를 합산하는 것으로 알려져 있다. 따라서, 평가 장치는 합산 신호를 형성하기 위한 적어도 하나의 합산 장치를 포함할 수 있다. 합산 장치는 센서 요소에 완전히 또는 부분적으로 통합될 수 있거나, 또는 센서 요소와 독립적으로 완전히 또는 부분적으로 구현될 수 있다. 합산 장치는 하드웨어 또는 소프트웨어 중 하나 또는 양자에 완전히 또는 부분적으로 구현될 수 있다.
위에서 설명한 바와 같이, 중심 신호와 합산 신호 사이의 비교는 구체적으로 하나 이상의 몫 신호를 형성함으로써 수행될 수 있다. 따라서, 일반적으로, 결합된 신호는, 중심 신호와 합산 신호의 몫을 형성하거나 또는 그 반대로 형성하는 것; 중심 신호의 배수와 합산 신호의 다중의 몫을 형성하거나 그 반대로 형성하는 것; 중심 신호의 선형 조합과 합산 신호의 선형 조합의 몫을 형성하거나 또는 그 반대로 형성하는 것; 중심 신호의 몫 및 합산 신호와 중심 신호의 선형 조합을 형성하거나 또는 그 반대로 형성하는 것; 합산 신호의 몫 및 합산 신호와 중심 신호의 선형 조합을 형성하거나 또는 그 반대로 형성하는 것; 중심 신호의 거듭제곱과 합산 신호의 거듭제곱의 몫을 형성하거나 또는 그 반대로 형성하는 것 중 하나 이상에 의해 유도된 몫 신호일 수 있다. 그러나, 다른 옵션이 있다. 평가 장치는 하나 이상의 몫 신호를 형성하도록 구성될 수 있다. 평가 장치는 또한 적어도 하나의 몫 신호를 평가함으로써 적어도 하나의 세로 좌표를 결정하도록 구성될 수 있다.
평가 장치는 특히 적어도 하나의 세로 좌표를 결정하기 위해 결합된 신호(Q)와 세로 좌표 사이에 적어도 하나의 사전결정된 관계를 사용하도록 구성될 수 있다. 따라서, 위에 개시된 이유로 인해 그리고 세로 좌표에 대한 광 스폿의 특성의 종속성으로 인해, 결합된 신호(Q)는 일반적으로 물체의 세로 좌표의 및/또는 광 스폿의 직경 또는 동등한 직경과 같은 광 스폿의 크기의 단조로운 함수이다. 따라서, 예로서, 특히 선형 광학 센서가 사용되는 경우, 센서 신호(scenter)와 합산 신호(ssum)의 단순 몫(Q=scenter/ssum)은 거리의 단조 감소 함수일 수 있다. 이 이론에 얽매이고 않고, 이는 위에서 설명한 선호 설정에서, 검출기에 도달하는 빛의 양이 감소하기 때문에, 중심 신호(scenter)와 합산 신호(ssum) 양자는 광원까지의 거리가 증가함에 따라 제곱 함수로 감소한다는 사실 때문이라고 믿어진다. 본 명세서에서, 그러나, 실험에 사용된 광학 설정에서, 이미지 평면의 광 스폿이 커지고, 그에 따라 더 넓은 영역에 분산되기 때문에, 중심 신호(scenter)는 합산 신호(ssum)보다 더 빠르게 감소한다. 따라서, 중심 신호와 합산 신호의 몫은 매트릭스의 광학 센서의 감광 영역에서 광 빔의 직경이나 광 스폿의 직경이 증가함에 따라 지속적으로 감소한다. 또한, 광 빔의 총 파워가 중심 신호와 총 센서 신호 양자에서 요인을 형성하기 때문에, 몫은 일반적으로 광 빔의 총 파워와 무관하다. 결과적으로, 몫(Q)은 중심 신호와 합산 신호 사이의 고유하고 명확한 관계와 광 빔의 크기 또는 직경을 제공하는 2차 신호를 형성할 수 있다. 반면에, 광 빔의 크기 또는 직경은 광 빔이 검출기를 향해 전파되는 물체와 검출기 자체 사이의 거리에 좌우되는데, 즉 물체의 세로 좌표에 좌우되기 때문에, 중심 신호와 한편으로는 합산 신호 사이에 그리고 다른 한편으로는 세로 좌표 사이에 독특하고 명확한 관계가 존재할 수 있다. 후자의 경우, 예를 들어 국제 공개 팜플렛 제 WO 2014/097181 A1 호와 같은 상술한 종래 기술 문헌 중 하나 이상을 참조한다. 사전결정된 관계는 가우시안 광 빔의 선형 조합을 가정하는 것과 같은 분석적 고려 사항에 의해, 물체의 세로 좌표의 함수로서 결합된 신호 및/또는 중심 신호를 측정하는 측정과 그로부터 파생된 합산 신호 또는 2차 신호와 같은 경험적 측정에 의해, 또는 양자에 의해 결정될 수 있다.
따라서, 일반적으로, 평가 장치는 몫 신호와 같은 결합된 신호(Q)를 평가함으로써 세로 좌표를 결정하도록 구성될 수 있다. 이러한 결정은 중심 신호와 합산 신호를 직접 결합하고 그리고 그 세로 좌표를 유도하는 것과 같은 1-단계 프로세스일 수 있거나, 또는 중심 신호 및 합산 신호로부터 결합된 신호를 첫번째로 유도하고 그리고 결합된 신호로부터 세로 좌표를 두번째로 유도하는 것과 같은 다중 단계 프로세스일 수 있다. 양 옵션, 즉 분리되고 독립적인 단계인 단계 c) 및 d)의 옵션과, 완전히 또는 부분적으로 결합된 단계 c) 및 d)의 옵션은 본 발명에 포함된다.
평가 장치는 결합된 신호와 세로 좌표 사이에 적어도 하나의 사전결정된 관계를 사용하도록 구성될 수 있다. 사전결정된 관계는 경험적 관계, 반-경험적 관계 및 분석적으로 유도된 관계 중 하나 이상일 수 있다. 평가 장치는 룩업 리스트 또는 룩업 테이블과 같은 사전결정된 관계를 저장하기 위한 적어도 하나의 데이터 저장 장치를 포함할 수 있다.
전술한 바와 같이, 광학 센서는 구체적으로 광 검출기, 바람직하게 무기 광 검출기, 더욱 바람직하게 무기 반도체 광 검출기, 가장 바람직하게 실리콘 광 검출기이거나 이를 포함할 수 있다. 특히, 광학 센서는 적외선 스펙트럼 범위에서 민감할 수 있다. 매트릭스의 모든 광학 센서 또는 매트릭스의 광학 센서의 적어도 하나의 그룹은 구체적으로 동일할 수 있다. 매트릭스의 동일한 광학 센서의 그룹이 특히 상이한 스펙트럼 범위에 대해 제공될 수 있거나, 모든 광학 센서가 스펙트럼 감도의 측면에서 동일할 수 있다. 또한, 광학 센서는 크기 및/또는 전자적 또는 광전자적 특성과 관련하여 동일할 수 있다.
매트릭스는 독립적인 광학 센서로 구성될 수 있다. 따라서, 무기 포토다이오드의 매트릭스가 구성될 수 있다. 그러나 대안적으로, CCD 검출기 칩과 같은 CCD 검출기, 및/또는 CMOS 검출기 칩과 같은 CMOS 검출기 중 하나 이상과 같은 상업적으로 이용 가능한 매트릭스가 사용될 수 있다.
따라서, 일반적으로 검출기의 광학 센서는 센서 어레이를 형성할 수 있거나, 또는 전술한 매트릭스와 같은 센서 어레이의 일부일 수 있다. 따라서, 예로서, 검출기는 m, n이 독립적으로 양의 정수인 m 행 및 n 열을 갖는 직사각형 어레이와 같은 광학 센서의 어레이를 포함할 수 있다. 바람직하게, 하나 이상의 열과 하나 이상의 행은 즉 n>1, m>1로 제공된다. 따라서, 예를 들어 n은 2 내지 16 또는 그 이상이고, m은 2 내지 16 또는 그 이상일 수 있다. 바람직하게, 행 수와 열 수의 비율은 1에 가깝다. 예를 들어, m/n=1:1, 4:3, 16:9 또는 이와 유사한 것을 선택함으로써, n 및 m은 0.3≤m/n≤3이 되도록 선택될 수 있다. 예를 들어, 어레이는 m=2, n=2 또는 m=3, n=3 등을 선택함으로써 동일한 수의 행과 열을 갖는 정사각형 어레이일 수 있다.
위에서 추가로 설명된 바와 같이, 매트릭스는 구체적으로 적어도 하나의 행, 바람직하게 복수의 행 및 복수의 열을 갖는 직사각형 매트릭스일 수 있다. 예로서, 행과 열은 본질적으로 수직으로 배향될 수 있으며, 여기서 "본질적으로 수직"이라는 용어와 관련하여 위에 주어진 정의를 참조할 수 있다. 따라서 예를 들어, 20° 미만, 특히 10° 미만 또는 심지어 5° 미만의 허용 오차도 허용될 수 있다. 넓은 범위의 시야를 제공하기 위해, 매트릭스는 구체적으로 적어도 10개의 행, 바람직하게 적어도 50개의 행, 보다 바람직하게 적어도 100개의 행을 가질 수 있다. 유사하게, 매트릭스는 적어도 10개의 열, 바람직하게 적어도 50개의 열, 보다 바람직하게 적어도 100개의 열을 가질 수 있다. 매트릭스는 적어도 50개의 광학 센서, 바람직하게 적어도 100개의 광학 센서, 보다 바람직하게 적어도 500개의 광학 센서를 포함할 수 있다. 매트릭스는 수-메가 픽셀 범위(multi-mega pixel range)의 다수의 픽셀을 포함할 수 있다. 그러나, 다른 실시예도 가능하다. 따라서, 위에서 설명한 바와 같이, 축 회전 대칭이 예상되는 설정에서, 픽셀이라고도 할 수 있는 매트릭스의 광학 센서의 원형 배열 또는 동심 배열이 선호될 수 있다.
조명원은, 복수의 조명 영역이 광학 센서의 매트릭스, 예를 들어 CMOS 검출기 상에 생성되도록 포인트 클라우드를 생성 및/또는 투영하도록 구성될 수 있다. 추가적으로, 스페클 및/또는 외부 광 및/또는 다중 반사로 인한 외란과 같은 외란이 광학 센서의 매트릭스에 존재할 수 있다. 평가 장치는 적어도 하나의 관심 영역, 예를 들어 물체의 세로 좌표를 결정하는 데 사용되는 광 빔에 의해 조명되는 하나 이상의 픽셀을 결정하도록 구성될 수 있다. 예를 들어, 평가 장치는 필터링 방법, 예를 들어 블롭 분석(blob-analysis) 및/또는 물체 인식 방법을 수행하도록 구성될 수 있다.
위에서 설명한 바와 같이, 중심 신호와 합산 신호를 평가함으로써, 검출기는 전체 물체 또는 그 하나 이상의 부분의 세로 좌표를 결정하는 옵션을 포함하여 물체의 적어도 하나의 세로 좌표를 결정할 수 있다. 또한, 그러나, 하나 이상의 가로 좌표 및/또는 회전 좌표를 포함하는 물체의 다른 좌표는 검출기에 의해, 특히 평가 장치에 의해 결정될 수 있다. 따라서, 예로서, 하나 이상의 횡단 센서가 물체의 적어도 하나의 가로 좌표를 결정하기 위해 사용될 수 있다. 위에서 설명한 바와 같이, 중심 신호가 발생하는 적어도 하나의 광학 센서의 위치는 물체의 적어도 하나의 가로 좌표에 대한 정보를 제공할 수 있으며, 여기에서 예를 들어 간단한 렌즈 방정식이 광학 변환을 위해 그리고 가로 좌표를 유도하기 위해 사용될 수 있다. 추가적으로 또는 대안적으로, 하나 이상의 추가 횡단 센서가 사용될 수 있고, 검출기에 포함될 수 있다. 국제 공개 팜플렛 제 WO 2014/097181 A1 호에 개시된 횡단 센서 및/또는 사분면 다이오드, CCD 또는 CMOS 칩 등과 같은 다른 위치 감지 장치(PSD)와 같은 다양한 횡단 센서가 일반적으로 당 업계에 알려져 있다. 추가적으로 또는 대안적으로, 예로서, 본 발명에 따른 검출기는 "R.A. Street: Technology and Applications of Amorphous Silicon, Springer-Verlag Heidelberg, 2010, pp. 346-349"에 개시된 하나 이상의 PSD를 포함할 수 있다. 다른 실시예도 가능하다. 이들 장치는 또한 일반적으로 본 발명에 따른 검출기로 구현될 수 있다. 예를 들어, 광 빔의 일부는 적어도 하나의 빔 분할 요소에 의해 검출기 내에서 분할될 수 있다. 예를 들어, 분할 부분은 CCD 또는 CMOS 칩 또는 카메라 센서와 같은 횡단 센서를 향해 안내될 수 있으며, 횡단 센서에서 분할 부분에 의해 생성된 광 스폿의 횡단 위치가 결정될 수 있으며, 이에 의해 물체의 적어도 하나의 가로 좌표를 결정한다. 결과적으로, 본 발명에 따른 검출기는 단순한 거리 측정 장치와 같은 1차원 검출기일 수 있거나, 또는 2차원 검출기 또는 심지어 3차원 검출기로 구현될 수 있다. 또한, 위에서 설명했거나 아래에서 더 자세히 설명하는 바와 같이, 풍경이나 환경을 1차원 방식으로 스캔함으로써, 3차원 이미지를 또한 생성할 수 있다. 따라서, 본 발명에 따른 검출기는 구체적으로 1차원 검출기, 2차원 검출기 또는 3차원 검출기 중 하나일 수 있다. 평가 장치는 또한 물체의 적어도 하나의 가로 좌표(x, y)를 결정하도록 구성될 수 있다. 평가 장치는 세로 좌표와 가로 좌표의 정보를 결합하고 그리고 공간에서 물체의 위치를 결정하도록 구성될 수 있다.
일 실시예에서, 검출기는 적어도 2개의 광학 센서를 포함할 수 있으며, 각각의 광학 센서는 감광 영역을 가지며, 각각의 감광 영역은 기하학적 중심을 가지며, 광학 센서의 기하학적 중심은 상이한 공간 오프셋에 의해 검출기의 광 축선으로부터 이격되어 있으며, 각각의 광학 센서는 광 수신 섬유를 통과한 광 빔에 의한 각각의 감광 영역의 조명에 응답하여 센서 신호를 생성하도록 구성된다. 평가 장치는 적어도 2개의 센서 신호를 결합함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하도록 구성될 수 있다.
광학 센서의 감광 영역은 물체에서 보이는 것처럼 중첩될 수 있거나, 또는 중첩되지 않을 있는데, 즉 중첩없이 서로 옆에 배치될 수 있다. 감광 영역은 서로 이격되어 있거나, 직접 인접할 수 있다. 광학 센서는 하나의 그리고 동일한 빔 경로 또는 부분 빔 경로에 위치될 수 있다. 대안적으로, 그러나, 광학 센서는 또한 상이한 부분 빔 경로에 위치될 수 있다. 광학 센서가 상이한 부분 빔 경로에 분산되어 있는 경우, 위에서 언급한 조건은, 적어도 하나의 제 1 광학 센서가 제 1 공간 오프셋에 의한 제 1 부분 빔 경로의 광 축으로부터 오프셋된 적어도 하나의 제 1 부분 빔 경로에 위치되고 그리고 적어도 하나의 제 2 광학 센서가 제 2 공간 오프셋에 의한 제 2 부분 빔 경로의 광 축으로부터 오프셋된 적어도 하나의 제 2 부분 빔 경로에 위치되도록 설명될 수 있으며, 여기에서 제 1 공간 오프셋과 제 2 공간 오프셋은 상이하다.
검출기는 2개 이상의 광학 센서를 포함할 수 있다. 임의의 경우에, 즉 정확히 2개의 광학 센서를 포함하는 검출기의 경우 그리고 2개 이상의 광학 센서를 포함하는 검출기의 경우, 광학 센서는 제 1 공간 오프셋에 의해 광 축으로부터 이격된 적어도 하나의 제 1 광학 센서와, 제 2 공간 오프셋에 의해 광 축으로부터 이격된 적어도 하나의 제 2 광학 센서를 포함하며, 여기에서 제 1 공간 오프셋과 제 2 공간 오프셋은 상이하다. 제 1 및 제 2 광학 센서 이외에 추가 광학 센서가 제공되는 경우, 이들 추가 광학 센서는 또한 조건을 충족할 수 있거나, 대안적으로 제 1 공간 오프셋에 의해, 제 2 공간 오프셋에 의해, 또는 상이한 공간 오프셋에 의해 광 축으로부터 이격될 수 있다. 예를 들어, 제 1 및 제 2 공간 오프셋은 적어도 1.2배, 보다 바람직하게 적어도 1.5배, 보다 바람직하게 적어도 2배 차이가 날 수 있다. 위에서 설명한 바와 같이, 각 감광 영역은 기하학적 중심을 갖는다. 각각의 감광 영역의 각각의 기하학적 중심은 빔 경로의 광 축 또는 각각의 광학 센서가 위치하는 각각의 빔 경로와 같은 검출기의 광 축으로부터 이격될 수 있다. 전술한 바와 같이, 광학 센서 및/또는 수신 섬유의 입구 면은 특히 바람직하게 광 축에 수직인 평면인 하나의 그리고 동일한 평면에 위치될 수 있다. 그러나, 다른 구성도 가능하다. 따라서, 광학 센서 및/또는 수신 섬유의 입구 면 중 둘 이상은 또한 광 축에 평행한 방향으로 이격될 수 있다.
예를 들어, 광학 센서는 세그먼트형 다이오드의 부분 다이오드일 수 있으며, 세그먼트형 다이오드의 중심은 검출기의 광 축으로부터 중심이 맞지 않는다. 광학 센서는 이중-셀 또는 사분면 다이오드의 부분 다이오드일 수 있고 및/또는 적어도 하나의 CMOS 센서를 포함할 수 있다. 본 명세서에서 사용되는 용어 "부분 다이오드"는 직렬 또는 병렬로 연결된 몇개의 다이오드를 포함할 수 있다. 이 예는 다소 간단하고 비용 효율적으로 실현할 수 있다. 따라서, 예를 들어, 이중-셀 다이오드 또는 사분면 다이오드는 저비용으로 널리 시판되고 있으며, 이러한 이중-셀 다이오드 또는 사분면 다이오드의 구동 방식이 일반적으로 알려져 있다. 본 명세서에서 사용되는 용어 "이중-셀 다이오드"는 일반적으로 하나의 패키징에 2개의 부분 다이오드를 갖는 다이오드를 의미한다. 이중 셀 및 사분면 다이오드는 2개 또는 4개의 개별적인 감광 영역, 특히 2개 또는 4개의 활성 영역을 가질 수 있다. 예를 들어, 이중-셀 다이오드는 각각 다이오드의 전체 기능을 가진 독립 다이오드를 형성할 수 있다. 예를 들어, 각각의 이중-셀 다이오드는 정사각형 또는 직사각형 형상을 가질 수 있으며, 2개의 다이오드는 2개의 부분 다이오드가 전체적으로 직사각형 형상을 갖는 1x2 또는 2x1 매트릭스를 형성하도록 하나의 평면에 배치될 수 있다. 그러나, 본 발명에서는, 이중-셀 다이오드 및 사분면 다이오드의 센서 신호를 평가하기 위한 새로운 방식이 제안되었으며, 아래에서 더 자세히 설명한다. 그러나, 일반적으로 광학 센서는 특히 사분면 다이오드의 부분 다이오드일 수 있으며, 사분면 다이오드의 중심은 검출기의 광 축으로부터 중심이 맞지 않는다. 본 명세서에서 사용되는 용어 "사분면 다이오드"는 일반적으로 하나의 패키징에 4개의 부분 다이오드를 갖는 다이오드를 의미한다. 예를 들어, 4개의 부분 다이오드는 각각 다이오드의 전체 기능을 갖는 독립 다이오드를 형성할 수 있다. 예를 들어, 4개의 부분 다이오드는 각각 정사각형 또는 직사각형 형상을 가질 수 있으며, 4개의 부분 다이오드는 4개의 부분 다이오드가 전체적으로 직사각형 또는 정사각형 형상의 2x2 매트릭스를 형성하도록 하나의 평면에 배치될 수 있다. 추가 예에서, 4개의 부분 다이오드는 전체적으로 원형 또는 타원형 형상을 갖는 2x2 매트릭스를 형성할 수 있다. 예를 들어, 부분 다이오드는 서로 최소 간격으로 인접할 수 있다.
부분 다이오드의 2x2 매트릭스를 갖는 사분면 다이오드가 사용되는 경우, 사분면 다이오드의 중심은 특히 중심을 벗어나거나 또는 광 축에서 오프셋될 수 있다. 따라서, 예로서, 사분면 다이오드의 광학 센서의 기하학적 중심의 교차점일 수 있는 사분면 다이오드의 중심은 적어도 0.2㎜, 보다 바람직하게 적어도 0.5㎜, 보다 바람직하게 적어도 1.0㎜ 또는 심지어 2.0㎜ 만큼 광 축으로부터 중심에서 벗어날 수 있다. 유사하게, 복수의 광학 센서를 갖는 다른 유형의 광학 센서 설정을 사용할 때, 광학 센서의 전체 중심은 동일한 거리만큼 광 축으로부터 오프셋될 수 있다.
일반적으로, 광학 센서의 감광 영역은 임의의 표면적 또는 크기를 가질 수 있다. 바람직하게, 그러나 특히 센서 신호의 단순화된 평가의 관점에서, 광학 센서의 감광 영역은 10% 미만, 바람직하게 5% 미만 또는 심지어 1% 미만의 허용오차 내에서와 같이 실질적으로 동일하다. 특히, 이것은 일반적으로 상업적으로 이용 가능한 사분면 다이오드의 경우이다.
전형적인 설정에서, 사분면 포토다이오드와 같은 시중에서 입수 가능한 사분면 다이오드는 포지셔닝, 즉 사분면 포토다이오드의 평면에서 광 스폿의 가로 좌표를 조정 및/또는 측정하는 데 사용된다. 따라서, 예를 들어 사분면 포토다이오드를 사용하는 레이저 빔 포지셔닝은 잘 알려져 있다. 그러나, 일반적인 편견에 따르면, 사분면 포토다이오드는 xy-포지셔닝에만 사용된다. 이 가정에 따르면, 사분면 포토다이오드는 거리 측정에 적합하지 않다. 그러나, 검출기의 광 축과 관련하여 중심을 벗어난 사분면 포토다이오드를 사용하는 위에서 언급한 결과는 아래의 추가 측정에서 볼 수 있듯이 그렇지 않은 것을 보여준다. 따라서, 위에서 언급한 바와 같이, 사분면 포토다이오드에서, 스폿의 비대칭은 위에서 언급한 오프셋에 의해서와 같이 사분면 다이오드를 오프-축으로 시프팅시킴으로써 측정할 수 있다. 이에 의해, 예를 들어 사분면 포토다이오드의 2개 이상의 부분 포토다이오드, 즉 사분면 다이오드의 사분면의 센서 신호 중 2개 이상의 결합된 신호(Q)를 형성함으로써 단조 z-의존적 함수가 생성될 수 있다. 본 명세서에서, 원칙적으로 단지 2개의 포토다이오드가 측정에 필요하다. 다른 2개의 다이오드는 노이즈 제거를 위해 또는 보다 정확한 측정을 위해 사용될 수 있다.
사분면 다이오드 또는 사분면 포토다이오드를 사용하는 것에 추가로 또는 대안으로, 다른 유형의 광학 센서를 사용할 수 있다. 따라서, 예를 들어 엇갈린 광학 센서가 사용될 수 있다.
사분면 다이오드를 사용하면 공지의 광학 검출기에 비해 많은 수의 이점이 있다. 따라서, 사분면 다이오드는 LED 또는 활성 타겟과 조합하여 많은 수의 응용 분야에 사용되며, 스펙트럼 감도와 같은 다양한 광학 특성과 다양한 크기로 매우 저렴한 가격으로 널리 시판되고 있다. 상업적으로 이용 가능한 제품이 본 발명에 따른 검출기에 구현될 수 있기 때문에, 특정 제조 프로세스를 설정할 필요가 없다.
아래에서 추가로 상세하게 설명하는 바와 같이, 본 발명에 따른 검출기를 사용하는 거리 측정은 하나 이상의 추가 거리 측정 수단을 검출기에 구현하고 및/또는 검출기를 다른 유형의 거리 측정 수단과 결합함으로써 향상될 수 있다. 따라서, 예로서, 검출기는 적어도 하나의 삼각측량 거리 측정 장치를 포함하거나 또는 이와 결합될 수 있다. 따라서, 위에서 설명한 측정 원리와 삼각측량 유형 거리 측정의 조합을 이용함으로써 거리 측정을 향상시킬 수 있다. 또한, x-좌표 및/또는 y-좌표와 같은 하나 이상의 다른 좌표를 측정하기 위한 수단이 제공될 수 있다. 사분면 다이오드를 사용하는 경우, 추가 목적으로 사분면 다이오드를 또한 사용할 수도 있다. 따라서, 사분면 다이오드는 광전자 및 레이저 물리학의 기술 분야에서 일반적으로 알려진 바와 같이 광 스폿의 종래의 x-y-측정에 또한 사용될 수 있다. 따라서, 예를 들어 렌즈 또는 검출기 위치는 거리 측정을 위한 스폿의 위치를 최적화하기 위해 사분면 다이오드의 종래의 xy-위치 정보를 사용하여 조정할 수 있다. 실제 예로서, 광 스폿은 초기에 사분면 다이오드의 중앙에 바로 위치할 수 있으며, 이는 일반적으로 몫 함수(Q)를 사용하여 상술된 거리 측정을 허용하지 않는다. 따라서, 첫째로 종래의 사분면 포토다이오드 기술은, 예를 들어 사분면 다이오드의 스폿 위치가 측정을 위해 최적화되도록 사분면 포토다이오드에서 광 스폿의 위치를 중심에서 벗어나게 하기 위해 사용될 수 있다. 따라서, 예를 들어, 검출기의 광학 센서의 상이한 오프-센터링은 광 축에 대한 광학 센서의 이동을 위한 시작 점이 될 수 있으며, 그 결과 광 스폿은 광 축에 대해서 그리고 광학 센서의 어레이의 기하학적 중심에 대해서 오프-센터링된다.
따라서, 일반적으로 검출기의 광학 센서는 센서 어레이를 형성할 수 있거나, 또는 전술한 사분면 다이오드와 같은 센서 어레이의 일부일 수 있다. 따라서, 예로서, 검출기는 m, n이 독립적으로 양의 정수인 m개의 행과 n개의 열을 갖는 직사각형 어레이와 같은 광학 센서의 어레이를 포함할 수 있다. 바람직하게, 하나 이상의 열과 하나 이상의 행이 즉 n>1, m>1로 제공된다. 따라서, 예를 들어 n은 2 내지 16 또는 그 이상이고, m은 2 내지 16 또는 그 이상일 수 있다. 바람직하게 행 수와 열 수의 비율은 1에 가깝다. 예를 들어, m/n=1:1, 4:3, 16:9 또는 이와 유사한 것을 선택함으로써, n 및 m은 0.3≤m/n≤3이 되도록 선택될 수 있다. 예를 들어, 어레이는 m=2, n=2 또는 m=3, n=3 등을 선택함으로써 동일한 수의 행과 열을 갖는 정사각형 어레이일 수 있다. 사분면 포토다이오드가 널리 사용 가능하기 때문에, 경우 m=2, n=2는 실제적인 이유로 바람직한 경우들 중 하나인 사분면 다이오드 또는 사분면 광학 센서의 경우이다.
시작 점으로서, 어레이 내의 광학 수신 섬유의 입구 면의 기하학적 중심은 특정 오프셋과 같이 광 축에서 오프-센터링될 수 있다. 광 수신 섬유의 입구 면은, 예를 들어 광 축에 수직인 평면에서 광 수신 섬유의 입구 면을 이동시킴으로써, 및/또는 예를 들어 평행 시프트로 광 축을 시프팅시키거나 및/또는 광 축을 틸팅시키는 것과 같이 광 축 자체를 이동시킴으로써와 같이, 예를 들어 구배를 따라 바람직하게 자동으로 광 축에 대해서 이동 가능할 수 있다. 따라서, 광 수신 섬유의 입구 면의 평면에서 광 빔에 의해 생성된 광 스폿의 위치를 조정하기 위해 광 수신 섬유의 입구 면이 시프팅될 수 있다. 추가적으로 또는 대안적으로, 광 축은 하나 이상의 편향 요소 및/또는 하나 이상의 렌즈를 사용하는 것과 같이 적절한 요소를 사용함으로써 시프팅 및/또는 틸팅될 수 있다. 예로서, 이동은, 광 축을 평행 시프팅시키고 및/또는 광 축을 틸팅시키는 것과 같이 광 축을 이동시키기 위해서, 광 수신 섬유의 입구 면을 이동 및/또는 시프트시키고 및/또는 하나 이상의 광학 요소를 이동 및/또는 시프트 및/또는 틸팅시키는 하나 이상의 피에조 액추에이터 및/또는 하나 이상의 전자기 액추에이터 및/또는 하나 이상의 공압 또는 기계적 액추에이터와 같은 하나 이상의 적절한 액추에이터를 사용하여 발생할 수 있다. 평가 장치는 특히, 예를 들어 광 축에 수직인 평면에서 광 축에 대한 센서 어레이의 상대적 위치를 제어하도록 조정될 수 있다. 첫째로 센서 신호를 사용하여 강 수신 섬유의 입구 면 상의 광 빔에 의해 생성된 광 스폿의 적어도 하나의 횡단 위치를 결정하고 및 둘째로 예를 들어 광 스폿이 중심에서 벗어날 때까지 평면에서 광 수신 섬유의 입구 면을 광 축으로 이동시키거나 및/또는 광 스폿이 중심에서 벗어날 때까지 렌즈를 틸팅시킴으로써, 광 수신 섬유의 입구 면 및/또는 광 축을 이동시키는 것과 같이 광 축에 대해서 어레이를 이동시키기 위해 평가 장치가 구성된다는 점에서 조정 절차가 발생될 수 있다. 여기서 사용되는 바와 같이, 횡단 위치는 또한 x-y-평면이라고 할 수 있는 광 축에 수직인 평면에서의 위치일 수 있다. 가로 좌표의 측정을 위해, 예를 들어 광학 센서의 센서 신호를 비교할 수 있다. 예를 들어, 센서 신호가 동일한 것으로 확인되는 경우 그리고 그에 따라 광 스폿이 사분면 다이오드의 중심과 같이 광학 센서에 대해 대칭적으로 위치되었다고 결정되는 경우, 광 스폿을 광 수신 섬유의 입구 면에서 중심에서 벗어나게 하기 위해 광 수신 섬유의 입구 면의 시프팅 및/또는 렌즈의 틸팅이 발생될 수 있다. 따라서, 광 축으로부터 광 수신 섬유의 입구 면의 중심을 중심에 벗어나게 하는 것과 같이 광 축으로부터 광 수신 섬유의 입구 면의 중심을 벗어나게 한 것은 광 스폿이 광 축 상에 위치되고, 그에 따라 중심에 있게 되는 전형적인 상황을 피하기 위한 단순히 시작 점일 수 있다. 따라서, 광 축에 대해서 어레이의 중심을 벗어나게 함으로써, 그에 따라 광 스폿은 중심에서 벗어나야 한다. 이것이 사실이 아닌 것으로 판명되어 광 스폿이 우연히 광 수신 섬유의 입구 면의 중앙에 위치되고 그리고 모든 광 수신 섬유의 입구 면을 동일하게 조명하는 경우, 상술한 광 축에 대한 어레이의 시프팅은 광 수신 섬유의 입구 면의 광 스폿을 중심에서 벗어나게 하기 위해 바람직하게 자동적으로 발생될 수 있다. 이에 의해, 신뢰할 수 있는 거리 측정이 발생될 수 있다. 또한, 이동 가능한 광원을 갖는 스캐닝 시스템에서, 사분면 다이오드의 광 스폿 위치는 고정되지 않을 수 있다. 이것은 여전히 가능하지만, 다이오드에서 스폿의 xy-위치에 따라 상이한 보정이 사용되어야 할 수 있다.
위에서 설명한 바와 같이, 구체적으로 사분면 포토다이오드가 사용될 수 있다. 시중에서 입수 가능한 사분면 포토다이오드는, UV 스펙트럼 범위에서 근적외선 스펙트럼 범위에 민감한 타입 S4349의 사분면 Si PIN 포토다이오드와 같은 독일 데-82211 허슁 암 암머시에 소재하는 "Hamamatsu Photonics Deutschland GmbH"로부터 입수 가능한 하나 이상의 사분면 포토다이오드와 같은 4개의 광학 센서를 제공하기 위해서 통합될 수 있다. 광학 센서의 어레이가 사용되는 경우, 어레이는 네이키드 칩이거나 또는 TO-5 금속 패키지에 캡슐화된 것과 같은 캡슐화된 어레이일 수 있다. 추가적으로 또는 대안적으로, 영국 지유21 6이비 웨스트 스트리트 워킹 서리에 소재하는 "TT Electronics plc, Fourth Floor, St Andrews House"로부터 입수 가능한 "TT Electronics OPR5911"과 같은 표면 장착 장치가 이용될 수 있다. 다른 광학 센서가 또한 사용될 수 있다.
또한, 정확히 하나의 사분면 포토다이오드를 사용하는 옵션 외에도, 2개 이상의 사분면 포토다이오드를 또한 사용할 수도 있는 것에 유의해야 한다. 따라서, 예로서, 2개 이상의 광학 센서를 제공하는, 전술한 바와 같이 거리 측정을 위해 제 1 사분면 포토다이오드가 사용될 수 있다. 예를 들어 적어도 하나의 가로 좌표 x 및/또는 y를 사용하는 것과 같은 횡단 위치 측정을 위해 제 1 사분면 포토다이오드의 빔 경로로부터 분리된 제 2 부분 빔 경로에서, 다른 사분면 포토다이오드가 사용될 수 있다. 예를 들어, 제 2 사분면 포토다이오드는 광 축에 대해 축 상에 위치될 수 있다.
또한, 하나 이상의 사분면 포토다이오드를 사용하는 옵션 외에도, 또한 하나 이상의 사분면 포토다이오드 또는 추가 포토다이오드 어레이는, 바람직하게 2x2 매트릭스와 같은 직사각형 매트릭스와 같은 대칭 형상에서 서로 가까이 배치되거나 또는 조립되는 분리된 포토다이오드에 의해 대체되거나 또는 모방될 수 있다. 그러나, 추가 조정이 가능하다. 이러한 배열 또는 어셈블리에서, 포토다이오드는 단일 하우징 또는 마운트의 모든 포토다이오드 또는 하나의 하우징 또는 마운트의 포토다이오드의 그룹, 또는 별도의 하우징 또는 마운트의 포토다이오드의 각각과 같은 하우징 또는 마운트에 배열되거나 조립될 수 있다. 또한, 포토다이오드는 또한 회로 기판에 직접 조립할 수 있다. 이러한 배열 또는 어셈블리에서, 포토다이오드는 포토다이오드의 활성 영역 사이의 분리가 1 센티미터 미만, 바람직하게 1 밀리미터 미만, 보다 바람직하게 가능한 한 작은 뚜렷한 값을 갖도록 배열될 수 있다. 또한, 측정을 악화시킬 수 있는 광학적 반사, 왜곡 등을 회피하기 위해, 활성 영역 사이의 공간은 비어 있거나, 또는 물질, 바람직하게 블랙 실리콘, 블랙 폴리옥시메틸렌 등과 같은 블랙 중합체와 같은 광 흡수 물질, 보다 바람직하게 블랙 실리콘 등과 같은 블랙 세라믹 또는 절연 블랙 중합체와 같은 광학적으로 흡수 및 전기 절연 물질로 충전될 수 있다. 또한, 포토다이오드 분리의 뚜렷한 값은 플라스틱 분리기와 같은 포토다이오드 사이에 별개의 빌딩 블록을 추가함으로써 또한 실현될 수 있다. 추가 실시예가 가능하다. 사분면 포토다이오드를 활성 영역 사이의 거리가 최소인 2x2 직사각형 매트릭스와 같이 유사한 설정으로 배열된 단일 다이오드로 대체하면 광학 검출기 비용을 더욱 최소화할 수 있다. 또한, 사분면 다이오드로부터의 2개 이상의 다이오드는 병렬 또는 직렬로 연결하여 단일 감광 영역을 형성할 수 있다.
광학 센서는 각각 독립적으로 불투명, 투명 또는 반투명일 수 있다. 그러나, 단순함을 위해, 이러한 불투명 센서는 일반적으로 널리 상업적으로 이용 가능하기 때문에, 광 빔에 대해 투명하지 않은 불투명 센서가 사용될 수 있다.
물체의 적어도 하나의 세로 좌표를 결정하는 것을 포함하는 전술한 동작은 적어도 하나의 평가 장치에 의해 수행된다. 따라서, 예로서, 하나 이상의 룩업 테이블을 구현하는 것과 같이, 상기 언급된 관계 중 하나 이상이 소프트웨어 및/또는 하드웨어에서 구현될 수 있다. 따라서, 일 예로서, 평가 장치는, 물체의 적어도 하나의 세로 좌표를 결정하기 위해서, 상기에 언급된 평가를 수행하도록 구성된 하나 이상의 컴퓨터, 주문형 집적 회로(ASIC), 필드 프로그래머블 게이트 어레이(Field Programmable Gate Array; FPGA) 또는 디지털 신호 프로세서(Digital Signal Processor; DSP)와 같은 하나 이상의 프로그래밍가능한 장치를 포함할 수 있다. 그러나, 추가적으로 또는 대안적으로, 평가 장치는 또한 하드웨어에 의해 완전히 또는 부분적으로 구현될 수 있다.
검출기는 단일 광 빔 또는 복수의 광 빔을 평가하도록 구성될 수 있다. 복수의 광 빔이 물체에서 검출기로 전파되는 경우, 광 빔을 구별하기 위한 수단이 제공될 수 있다. 따라서, 광 빔은 상이한 스펙트럼 특성을 가질 수 있고, 검출기는 상이한 광 빔을 구별하기 위한 하나 이상의 파장 선택 요소를 포함할 수 있다. 다음에, 각각의 광 빔을 독립적으로 평가할 수 있다. 예로서, 파장 선택 요소는 하나 이상의 필터, 하나 이상의 프리즘, 하나 이상의 격자, 하나 이상의 이색성 미러 또는 이들의 임의의 조합이거나 이를 포함할 수 있다. 또한, 추가적으로 또는 대안적으로, 2개 이상의 광 빔을 구별하기 위해, 광 빔이 특정 방식으로 변조될 수 있다. 따라서, 예로서, 광 빔은 주파수 변조될 수 있고, 센서 신호는 그들의 변조 주파수에 따라 상이한 광 빔으로부터 발생하는 센서 신호를 부분적으로 구별하기 위해 변조될 수 있다. 이러한 기술은 일반적으로 고주파 전자장치의 분야에 숙련자에게 알려져 있다. 일반적으로, 평가 장치는 상이한 변조를 갖는 상이한 광 빔을 구별하기 위해 구성될 수 있다.
전술한 바와 같이, 검출기는 하나 이상의 추가 광학 요소와 같은 하나 이상의 추가 요소를 더 포함할 수 있다. 또한, 검출기는 적어도 하나의 하우징에 완전히 또는 부분적으로 통합될 수 있다.
키트는 검출기를 향해 적어도 하나의 광 빔을 지향시키도록 구성된 적어도 하나의 비콘(beacon) 장치를 더 포함할 수 있으며, 여기서 비콘 장치는 물체에 부착 가능한 것, 물체에 의해 고정될 수 있는 것 그리고 물체에 통합될 수 있는 것 중 적어도 하나이다. 적어도 하나의 비콘 장치는 레이저, LED, 전구 등과 같은 하나 이상의 광원과 같은 하나 이상의 조명원을 포함하는 하나 이상의 활성 비콘 장치이거나 이를 포함할 수 있다. 예를 들어, 조명원에서 방출되는 광은 300 내지 100㎚, 특히 500 내지 1000㎚의 파장을 가질 수 있다. 대안적으로, 위에서 설명된 바와 같이, 예를 들어 780㎚ 내지 3.0㎛의 범위와 같은 적외선 스펙트럼 범위가 사용될 수 있다. 구체적으로, 실리콘 포토다이오드가 구체적으로 700㎚ 내지 1000㎚ 범위에서 적용 가능한 근적외선 영역이 사용될 수 있다. 하나 이상의 비콘 장치에 의해 방출된 광은 2개 이상의 광 빔을 구별하기 위해 위에 설명된 바와 같이 변조되지 않거나 또는 변조될 수 있다. 추가적으로 또는 대안적으로, 적어도 하나의 비콘 장치는 하나 이상의 반사 요소를 포함하는 것과 같이 검출기를 향해 하나 이상의 광 빔을 반사하도록 구성될 수 있다. 또한, 적어도 하나의 비콘 장치는 광 빔을 산란시키도록 구성된 하나 이상의 산란 요소이거나 이를 포함할 수 있다. 본 명세서에서, 탄성 또는 비탄성 산란이 사용될 수 있다. 적어도 하나의 비콘 장치가 검출기를 향하여 1차 광 빔을 반사 및/또는 산란하도록 구성되는 경우, 비콘 장치는 광 빔의 스펙트럼 특성에 영향을 받지 않고 그대로 두도록 구성될 수 있거나, 대안적으로 광 빔의 파장을 수정하는 것과 같이 광 빔의 스펙트럼 특성을 변경하도록 구성될 수 있다.
추가 측면에서, 본 발명은 전술한 바와 같이 또는 아래에 더 자세히 설명되는 바와 같이 검출기를 참조하는 하나 이상의 실시예에 따른 본 발명에 따른 키트를 사용함으로써 적어도 하나의 물체의 위치를 결정하는 방법을 개시한다. 또한, 다른 유형의 키트가 사용될 수 있다. 방법은 다음의 방법 단계들을 포함하며, 방법 단계들은 주어진 순서로 수행되거나 또는 상이한 순서로 수행될 수 있다. 또한, 나열되지 않은 하나 이상의 추가 방법 단계들이 존재할 수 있다. 또한, 하나, 하나 이상 또는 심지어 모든 방법 단계들이 반복적으로 수행될 수 있다.
이 방법은:
ⅰ) 적어도 하나의 측정 헤드를 제공하는 단계 ― 상기 측정 헤드는:
- 적어도 하나의 전송 장치 ― 상기 전송 장치는 물체로부터 측정 헤드로 전파하는 적어도 하나의 입사 광 빔에 응답하여 적어도 하나의 초점 길이를 가짐 ―; 및
- 적어도 2개의 광 수신 섬유 ― 상기 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 가지며, 여기서 k는 열전도율이고, εr은 비유전율임 ―를 포함함 ―;
ⅱ) 적어도 하나의 검출기를 제공하는 단계 ― 상기 검출기는 적어도 2개의 광학 센서를 포함하며, 각 광학 센서는 적어도 하나의 감광 영역을 가지며, 각각의 광학 센서는 측정 헤드의 광 수신 섬유 중 적어도 하나를 통과한 광 빔에 의한 각각의 감광 영역의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 설계됨 ―;
ⅲ) 적어도 하나의 광 수신 섬유를 통과한 적어도 하나의 광 빔으로 검출기의 적어도 2개의 광학 센서의 각 감광 영역을 조명하며, 이에 의해 각각의 감광 영역은 적어도 하나의 센서 신호를 생성하는 단계 ―; 및
ⅳ) 센서 신호를 평가하며, 이에 의해 물체의 적어도 하나의 세로 좌표(z)를 결정하는 단계 ― 평가는 센서 신호의 결합된 신호(Q)를 유도하는 것을 포함함 ―를 포함한다.
구체적으로, 제 1 및 제 2 센서 신호를 평가하는 것은 제 1 및 제 2 센서 신호를 나누거나, 제 1 및 제 2 센서 신호의 배수를 나누거나, 또는 제 1 및 제 2 센서 신호의 선형 조합을 나눔으로써 결합된 신호(Q)를 유도하는 것을 포함할 수 있다. 또한, 세로 좌표를 결정하는 것은 결합된 신호(Q)를 평가하는 것을 포함할 수 있다. 세부 사항, 옵션 및 정의에 대해서는, 위에서 논의한 바와 같이 검출기를 참조할 수 있다. 따라서, 구체적으로, 위에서 설명한 바와 같이, 상기 방법은 예를 들어 위에 제공되거나 또는 아래에 보다 상세하게 제공된 실시예들 중 하나 이상에 따라 본 발명에 따른 검출기를 사용하는 것을 포함할 수 있다.
본 발명의 또 다른 측면에서, 위에 제공되거나 또는 아래에 보다 상세하게 제공된 실시예들 중 하나 이상에 따라 본 발명에 따른 키트의 용도는, 사용 목적을 위해, 교통 기술의 위치 측정; 엔터테인먼트 응용; 광학 데이터 저장 응용; 보안 응용; 감시 응용; 안전 응용; 인간-기계 인터페이스 응용; 추적 응용; 사진 응용; 이미징 응용 또는 카메라 응용; 산업용 감지 응용; 의료 응용; 3D 프린팅 응용; 적어도 하나의 공간의 지도를 생성하는 매핑 응용; 차량용 유도 또는 추적 비콘 검출기; 머신 비전 응용; 로봇 응용; 품질 제어 응용; 제조 응용으로 구성된 그룹으로부터 선택된다.
본 출원에 따른 측정 헤드 및 키트의 추가 사용에 대해서는 국제 공개 팜플렛 제 WO 2018/091640 A1 호를 참조하고, 그 전체 내용은 여기에 참조로 원용된다.
전반적으로, 본 발명의 맥락에서, 하기의 실시예가 바람직한 것으로 간주된다:
실시예 1: 적어도 하나의 물체의 위치를 결정하기 위한 측정 헤드에 있어서,
- 적어도 하나의 전송 장치 ― 상기 전송 장치는 물체로부터 측정 헤드로 전파하는 적어도 하나의 입사 광 빔에 응답하여 적어도 하나의 초점 길이를 가짐 ―; 및
- 적어도 2개의 광 수신 섬유 ― 상기 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 가지며, 여기서 k는 열전도율이고, εr은 비유전율임 ―를 포함하는, 측정 헤드.
실시예 2: 이전 실시예에 기재된 측정 헤드로서, 상기 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.743(m·K)/W를 가지며, 바람직하게 비율은 εr/k≥1.133(m·K)/W인, 측정 헤드.
실시예 3: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 비율 εr/k은 범위 0.362(m·K)/W≤εr/k≤1854(m·K)/W이며, 여기서 k는 열전도율이고, εr은 비유전율인, 측정 헤드.
실시예 4: 이전 실시예에 기재된 측정 헤드로서, 비율 εr/k은 범위 0.743(m·K)/W≤εr/k≤194(m·K)/W이며, 바람직하게 비율 εr/k은 범위 1.133(m·K)/W≤εr/k≤88.7(m·K)/W인, 측정 헤드.
실시예 5: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 상기 전송 장치(114)는 범위 9.05≤ve/nD≤77.3의 비율 ve/nD를 가지며, 여기서 ve는 아베-수(Abbe-number)이고, nD는 굴절률이며, 아베-수 ve는  로 주어지며, ni는 상이한 파장에 대한 굴절률이며, nC는 656㎚에 대한 굴절률이며, nD는 589㎚에 대한 굴절률이며, nF는 486㎚에 대한 굴절률인, 측정 헤드.
로 주어지며, ni는 상이한 파장에 대한 굴절률이며, nC는 656㎚에 대한 굴절률이며, nD는 589㎚에 대한 굴절률이며, nF는 486㎚에 대한 굴절률인, 측정 헤드.
실시예 6: 이전 실시예에 기재된 측정 헤드로서, 비율은 ve/nD는 13.9≤νe/nD≤44.7의 범위이며, 보다 바람직하게 15.8≤νe/nD≤40.1의 범위인, 측정 헤드.
실시예 7: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 광 수신 섬유 각각은 적어도 하나의 클래딩 및 적어도 하나의 코어를 포함하는, 측정 헤드.
실시예 8: 이전 실시예에 기재된 측정 헤드로서, 곱 αΔn은 가시 및 근적외선 파장 범위에서 적어도 하나의 파장에서, 바람직하게 656㎚, 589㎚ 또는 486㎚에서 선택된 적어도 하나의 파장에서 αΔn≤110dB/km이며, 여기서 α는 감쇠 계수이고, Δn은 Δn=(n1 2-n2 2)/(2n1 2)을 갖는 굴절률 대비이며, n1은 최대 코어 굴절률이고, n2는 클래딩 굴절률인, 측정 헤드.
실시예 9: 이전 실시예에 기재된 측정 헤드로서, 곱 αΔn은 αΔn≤23dB/km, 바람직하게 αΔn≤11.26dB/km인, 측정 헤드.
실시예 10: 3개의 이전 실시예들 중 하나에 기재된 측정 헤드로서, 곱 αΔn은 가시 및 근적외선 파장 범위에서 적어도 하나의 파장에서, 바람직하게 656㎚, 589㎚ 또는 486㎚에서 선택된 적어도 하나의 파장에서 범위 0.0004dB/km≤αΔn≤110dB/km이며, 여기서 α는 감쇠 계수이고, Δn은 Δn=(n1 2-n2 2)/(2n1 2)을 갖는 굴절률 대비이며, n1은 최대 코어 굴절률이고, n2는 클래딩 굴절률인, 측정 헤드.
실시예 11: 이전 실시예에 기재된 측정 헤드로서, 곱 αΔn은 범위 0.002dB/km≤αΔn≤23dB/km, 보다 바람직하게 범위 0.02dB/km≤αΔn≤11.26dB/km인, 측정 헤드.
실시예 12: 3개의 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 상기 전송 장치는 개구 면적(D1)을 가지며, 상기 광 수신 섬유 중 적어도 하나는 단면적(D2)을 갖는 섬유 코어를 가지며, 비율 D1/D2는 범위 0.54≤D1/D2≤5087, 바람직하게 1.27≤D1/D2≤413, 보다 바람직하게 2.17≤D1/D2≤59.2인, 측정 헤드.
실시예 13: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 상기 측정 헤드는 적어도 하나의 스페이서 장치를 포함하고, 상기 스페이서 장치는 적어도 하나의 전송 장치와, 광 수신 섬유 중 적어도 하나를 연결하도록 구성되는, 측정 헤드.
실시예 14: 이전 실시예에 기재된 측정 헤드로서, 상기 스페이서 장치는 중실 부피(Vs) 및 중공 부피(Vh)를 포함하며, 여기서 중실 부피와 중공 부피의 비율 Vs/Vh는 범위 0.013≤Vs/Vh≤547, 바람직하게 범위 0.047≤Vs/Vh≤87.6, 보다 바람직하게 범위 0.171≤Vs/Vh≤26.2인, 측정 헤드.
실시예 15: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 상기 측정 헤드는 물체를 조명하기 위한 조명원을 더 포함하는, 측정 헤드.
실시예 16: 이전 실시예에 기재된 측정 헤드로서, 상기 조명원은 범위 1.5·10-7㎟·sr≤G≤314㎟·sr, 바람직하게 범위 1·10-5㎟·sr≤G≤22㎟·sr, 보다 바람직하게 범위 3·10-4㎟·sr≤G≤3.3㎟·sr의 기하학적 확장(G)을 갖는, 측정 헤드.
실시예 17: 이전 실시예에 기재된 측정 헤드로서, 상기 조명원의 기하학적 확장(G)은 G=A·Ω·n2로 정의되며, 여기에서 A는 A=AOF=π·r2 OF를 갖는 표면 영역이며, Ω는 광에 의해 대치되는 투영된 입체각이고, n은 매체의 굴절률이며, 절반 조리개 각도(θ)를 갖는 회전-대칭 광학 시스템의 경우, 기하학적 확장은 G=π·A·sin2(θ)n2이며, 절반 조리개 각도(θ)는 범위 0.01°≤θ≤42°; 바람직하게 범위 0.1°≤θ≤21°; 보다 바람직하게 범위 0.15°≤θ≤13°일 수 있으며 및/또는 발산 각도(θmax)는 범위 0.01°≤θmax≤42°; 바람직하게 범위 0.1°≤θmax≤21°; 보다 바람직하게 범위 0.15°≤θmax≤13°이며, 영역(A)은 10㎟보다 작으며, 바람직하게 3㎟보다 작으며, 보다 바람직하게 1㎟보다 작은, 측정 헤드.
실시예 18: 2개의 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 각각의 광 수신 섬유는 적어도 하나의 섬유 클래딩 및 적어도 하나의 코어를 포함하며, 여기서 비율 d1/BL은 범위 0.0011≤d1/BL≤513이며, 여기서 d1은 코어의 직경이며, BL은 베이스라인인, 측정 헤드.
실시예 19: 이전 실시예에 기재된 측정 헤드로서, 비율 d1/BL은 범위 0.0129≤d1/BL≤28, 바람직하게 범위 0.185≤d1/BL≤7.1인, 측정 헤드.
실시예 20: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 각각의 광 수신 섬유는 적어도 하나의 입구 면을 가지며, 각각의 입구 면의 기하학적 중심은 전송 장치의 광 축에 대해 수직으로 정렬되는, 측정 헤드.
실시예 21: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 상기 광 수신 섬유 중 적어도 하나는 성형 및/또는 구조화된 입구 및/또는 출구 면을 갖는 구조화된 섬유인, 측정 헤드.
실시예 22: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 전송 장치는 구체적으로, 예를 들어 적어도 하나의 초점 조정 가능 렌즈, 적어도 하나의 비구면 렌즈, 적어도 하나의 구면 렌즈, 적어도 하나의 프레넬(Fresnel) 렌즈로 구성되는 그룹으로부터 선택된 적어도 하나의 렌저와 같은 적어도 하나의 렌즈; 적어도 하나의 회절 광학 요소; 적어도 하나의 오목 미러; 적어도 하나의 빔 편향 요소, 바람직하게 적어도 하나의 미러; 적어도 하나의 빔 분할 요소, 바람직하게 빔 분할 큐브 또는 빔 분할 미러 중 적어도 하나; 적어도 하나의 멀티-렌즈 시스템; 하나 이상의 그래디언트 인덱스(GRIN: gradient index) 렌즈 중 하나 이상을 포함할 수 있는, 측정 헤드.
실시예 23: 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 상기 측정 헤드는 관심 영역을 스캔하기 위해 측정 헤드를 이동시키도록 구성된 적어도 하나의 액추에이터를 포함하는, 측정 헤드.
실시예 24: 이전 실시예에 기재된 측정 헤드로서, 액추에이터는 적어도 하나의 전기기계 액추에이터 및/또는 적어도 하나의 피에조 액추에이터를 포함하며, 피에조 액추에이터는 적어도 하나의 압전세라믹 액추에이터; 적어도 하나의 압전 액추에이터로 구성되는 그룹으로부터 선택된 적어도 하나의 액추에이터를 포함하는, 측정 헤드.
실시예 25: 2개의 이전 실시예들 중 어느 하나에 기재된 측정 헤드로서, 상기 액추에이터는 측정 헤드의 광 조명 섬유 및/또는 측정 헤드를 이동시키도록 구성되는, 측정 헤드.
실시예 26: 이전 실시예에 기재된 측정 헤드로서, 상기 액추에이터는 선형 스캔 및/또는 방사형 스캔 및/또는 나선형 스캔에서 광 조명 섬유 및/또는 측정 헤드 중 하나 또는 양자를 이동시키도록 구성되는, 측정 헤드.
실시예 27: 이전 실시예들 중 어느 하나에 기재된 적어도 하나의 측정 헤드 및 적어도 하나의 물체의 위치를 결정하기 위한 검출기를 포함하는 키트에 있어서,
상기 검출기는:
- 적어도 2개의 광학 센서 ― 각각의 광학 센서는 적어도 하나의 감광 영역을 가지며, 각 광학 센서는 측정 헤드의 광 수신 섬유 중 적어도 하나를 통과한 광 빔에 의한 각각의 감광 영역의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 설계됨 ―; 및
- 센서 신호로부터 결합된 신호(Q)를 평가함으로써 물체의 적어도 하나의 세로 좌표(z)를 결정하도록 구성되는 적어도 하나의 평가 장치를 포함하는, 키트.
실시예 28: 이전 실시예에 기재된 키트로서, 상기 평가 장치는 센서 신호를 나누는 것, 센서 신호의 배수를 나누는 것, 센서 신호의 선형 조합을 나누는 것 중 하나 이상에 의해 결합된 신호(Q)를 유도하도록 구성되는, 키트.
실시예 29: 이전 실시예에 기재된 키트로서, 상기 평가 장치는 세로 좌표를 결정하기 위해 결합된 신호(Q)와 세로 좌표 사이의 적어도 하나의 사전결정된 관계를 사용하도록 구성되는, 키트.
실시예 30: 이전 실시예들 중 어느 하나에 기재된 키트로서, 상기 평가 장치는 하기의 수학식에 의해 결합된 신호(Q)를 유도하도록 구성되며,

여기서 x와 y는 가로 좌표이고, A1과 A2는 광학 센서의 센서 위치에서 빔 프로파일의 영역이고, E(x, y, z0)는 물체 거리(z0)에서 주어진 빔 프로파일을 나타내는, 키트.
실시예 31: 키트를 기재하는 이전 실시예들 중 어느 하나에 따른 키트로서, 각각의 센서 신호는 광 빔의 빔 프로파일의 적어도 하나의 영역의 적어도 하나의 정보를 포함하며, 빔 프로파일은 사다리꼴 빔 프로파일; 삼각형 빔 프로파일; 원뿔형 빔 프로파일; 및 가우시안 빔 프로파일의 선형 조합으로 구성되는 그룹으로부터 선택되는, 키트.
실시예 32: 이전 실시예에 따른 키트로서, 감광 영역은 제 1 센서 신호가 빔 프로파일의 제 1 영역의 정보를 포함하고 그리고 제 2 센서 신호가 빔 프로파일의 제 2 영역의 정보를 포함하도록 배열되며, 빔 프로파일의 제 1 영역 및 빔 프로파일의 제 2 영역은 인접하거나 중첩되는 영역 중 하나 또는 둘 모두이고, 평가 장치는 빔 프로파일의 제 1 영역 및 빔 프로파일의 제 2 영역을 결정하도록 구성되며, 빔 프로파일의 제 1 영역은 본질적으로 빔 프로파일의 에지 정보를 포함하고 그리고 빔 프로파일의 제 2 영역은 본질적으로 빔 프로파일의 중심 정보를 포함하며, 에지 정보는 빔 프로파일의 제 1 영역에 있는 광자 수에 관한 정보를 포함하며 그리고 중심 정보는 빔 프로파일의 제 2 영역에 있는 광자 수에 관한 정보를 포함하며, 평가 장치는 에지 정보와 중심 정보를 나누는 것, 에지 정보와 중심 정보의 배수를 나누는 것, 에지 정보와 중심 정보의 선형 조합을 나누는 것 중 하나 이상에 의해 결합된 신호(Q)를 유도하도록 구성되는, 키트.
실시예 33: 키트를 기재하는 이전 실시예들 중 어느 하나에 기재된 키트로서, 상기 광학 센서는 이중-셀 또는 사분면 다이오드의 부분 다이오드이고 및/또는 적어도 하나의 CMOS 센서를 포함하는, 키트.
실시예 34: 키트를 기재하는 이전 실시예들 중 어느 하나에 기재된 키트를 사용하여 적어도 하나의 물체의 위치를 결정하는 방법에 있어서,
ⅰ) 적어도 하나의 측정 헤드를 제공하는 단계 ― 상기 측정 헤드는:
- 적어도 하나의 전송 장치 ― 상기 전송 장치는 물체로부터 측정 헤드로 전파하는 적어도 하나의 입사 광 빔에 응답하여 적어도 하나의 초점 길이를 가짐 ―; 및
- 적어도 2개의 광 수신 섬유 ― 상기 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 가지며, 여기서 k는 열전도율이고, εr은 비유전율임 ―를 포함함 ―;
ⅱ) 적어도 하나의 검출기를 제공하는 단계 ― 상기 검출기는 적어도 2개의 광학 센서를 포함하며, 각 광학 센서는 적어도 하나의 감광 영역을 가지며, 각각의 광학 센서는 측정 헤드의 광 수신 섬유 중 적어도 하나를 통과한 광 빔에 의한 각각의 감광 영역의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 설계됨 ―;
ⅲ) 적어도 하나의 광 수신 섬유를 통과한 적어도 하나의 광 빔으로 검출기의 적어도 2개의 광학 센서의 각 감광 영역을 조명하며, 이에 의해 각각의 감광 영역은 적어도 하나의 센서 신호를 생성하는 단계 ―; 및
ⅳ) 센서 신호를 평가하며, 이에 의해 물체의 적어도 하나의 세로 좌표(z)를 결정하는 단계 ― 평가는 센서 신호의 결합된 신호(Q)를 유도하는 것을 포함함 ―를 포함하는, 물체 위치 결정 방법.
실시예 35: 측정 헤드에 관한 이전 실시예들 중 어느 하나에 기재된 측정 헤드의 용도에 있어서,
사용 목적을 위해, 교통 기술에서의 위치 측정; 엔터테인먼트 응용; 광학 데이터 저장 응용; 보안 응용; 감시 응용; 안전 응용; 인간-기계 인터페이스 응용; 물류 응용; 내시경 응용; 의료 응용; 추적 응용; 사진 응용; 머신 비전 응용; 로봇 응용; 품질 관리 응용; 3D 프린팅 응용; 증강 현실 응용; 제조 응용; 광학 데이터 저장 및 판독과 조합된 용도로 구성되는 그룹으로부터 선택되는, 측정 헤드의 용도.
본 발명의 추가의 선택적 세부사항 및 특징은 종속항과 함께 바람직한 예시적인 실시예의 설명으로부터 명백하다. 이와 관련하여, 특정 특징들은 단독으로 또는 다른 특징들과 조합하여 구현될 수 있다. 본 발명은 예시적인 실시예로 제한되지 않는다. 예시적인 실시예가 도면에 개략적으로 도시되어 있다. 개별 도면에서 동일한 도면부호는 동일한 요소들 또는 동일한 기능을 갖는 요소들, 또는 그 기능과 관련하여 서로 대응하는 요소들을 지칭한다.
도 1a 내지 도 1c는 본 발명에 따른 측정 헤드의 실시예를 도시한다.
도 2는 본 발명에 따른 키트의 실시예를 도시한다.
도 3은 측정 헤드의 섬유 배열의 단면을 도시한다.
도 4a 내지 도 4mm은 측정 헤드의 평면도 실시예를 도시한다.
도 5a 내지 도 5mm은 측정 헤드의 섬유 및 렌즈 배열의 평면도 실시예를 도시한다.
도 6a 내지 도 6d는 측정 헤드에서 섬유 및 렌즈 배열의 실시예의 측면도를 도시한다.
도 7a 내지 도 7f는 섬유 단부에서의 렌즈 배열을 도시한다.
도 8a 내지 도 8e는 측정 헤드의 추가 실시예를 도시한다.
도 9는 측정 헤드의 추가 실시예를 도시한다.
도 10은 측정 헤드의 추가 실시예를 도시한다.
도 11은 광 수신 섬유의 실시예를 도시한다.
도 1a 내지 도 1c는 본 발명에 따른 측정 헤드의 실시예를 도시한다.
도 2는 본 발명에 따른 키트의 실시예를 도시한다.
도 3은 측정 헤드의 섬유 배열의 단면을 도시한다.
도 4a 내지 도 4mm은 측정 헤드의 평면도 실시예를 도시한다.
도 5a 내지 도 5mm은 측정 헤드의 섬유 및 렌즈 배열의 평면도 실시예를 도시한다.
도 6a 내지 도 6d는 측정 헤드에서 섬유 및 렌즈 배열의 실시예의 측면도를 도시한다.
도 7a 내지 도 7f는 섬유 단부에서의 렌즈 배열을 도시한다.
도 8a 내지 도 8e는 측정 헤드의 추가 실시예를 도시한다.
도 9는 측정 헤드의 추가 실시예를 도시한다.
도 10은 측정 헤드의 추가 실시예를 도시한다.
도 11은 광 수신 섬유의 실시예를 도시한다.
도 1a 내지 도 1c에서, 적어도 하나의 물체(112)의 위치를 결정하기 위한 측정 헤드(110)의 예시적인 실시예의 개략도가 도시되어 있다. 측정 헤드(110)는 적어도 하나의 전송 장치(114)를 포함한다. 전송 장치(114)는 물체(112)로부터 측정 헤드(110)로 전파하는 적어도 하나의 입사 광 빔에 응답하여 적어도 하나의 초점 길이를 갖는다. 측정 헤드(110)는 적어도 2개의 광 수신 섬유(116)를 포함한다.
광 수신 섬유(116)는 광범위한 환경에서 거리 측정의 안정성을 보장하기 위해 특정한 기계적 및 광학적 특성을 가질 수 있다. 광 수신 섬유(116)의 기계적 특성은 동일하거나, 또는 광 수신 섬유(116)의 기계적 특성이 상이할 수 있다. 이 이론에 얽매이지 않고, 광 수신 섬유(116)의 광 지원 기능은 굴절률과 특정 에너지 전송 특성의 관계에 의존한다. 광 수신 섬유(116)의 모든 기능이 안정된 방식으로 유지되기 위해서는 추가적인 특정 기계적 파라미터가 전제 조건일 수 있다. 따라서, 특정 기계적 파라미터는 안정적인 측정 자체를 보장하기 위한 전제 조건으로 작용할 수 있다. 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 갖는다. 바람직하게, 광 수신 섬유 및/또는 전송 장치 중 적어도 하나는 비율 εr/k≥0.743(m·K)/W를 가지며, 바람직하게 비율은 εr/k≥1.133(m·K)/W이다. 광 수신 섬유(116) 및/또는 전송 장치(114) 중 적어도 하나는 범위 0.362(m·K)/W≤εr/k≤1854(m·K)/W의 비율 εr/k를 가지며, 여기서 k는 열전도율이며, εr은 비유전율이다. 또한, 비유전율은 또는 유전율로서 공지되어 있다. 바람직하게, 비율 εr/k는 범위 0.743(m·K)/W≤εr/k≤194(m·K)/W이다. 보다 바람직하게, 비율 εr/k은 범위 1.133(m·K)/W≤εr/k≤88.7(m·K)/W이다. 광 수신 섬유(116) 및/또는 전송 장치(114) 중 적어도 하나는 범위 1.02≤εr≤18.5, 바람직하게 범위 1.02≤εr≤14.5, 보다 바람직하게 범위 1.02≤εr≤8.7의 비유전율을 가질 수 있으며, 여기에서 비유전율은 20℃ 및 1㎑에서 측정된다. 광 수신 섬유(116) 및/또는 전송 장치(114)는 k≤24(m·K)/W, 바람직하게 k≤17(m·K)/W, 보다 바람직하게 k≤14(m·K)/W의 열전도율을 가질 수 있다. 광 수신 섬유(116) 및/또는 전송 장치(114)는 k≥0.003(m·K)/W, 바람직하게 k≤0.007(m·K)/W, 보다 바람직하게 k≤0.014(m·K)/W의 열전도율을 가질 수 있다. 열전도율은 0℃ 및 <1% 상대 습도에서 측정될 수 있다.
전송 장치(114)는 범위 9.05≤νe/nD≤77.3의 비율 νe/nD을 가질 수 있으며, 여기서 νe는 아베-수(Abbe-number)이고, nD는 굴절률이다. 아베-수는  에 의해 주어지고, ni는 상이한 파장에 대한 굴절률이며, nC는 굴절률 656㎚에 대한 굴절률이며, nD는 589㎚에 대한 굴절률이며, nF는 실온에서 측정한 486㎚에 대한 굴절률이며, 예를 들어 https://en.wikipedia.org/wiki/Abbe_number를 참조한다. 바람직하게, 비율 νe/nD는 13.9≤νe/nD≤44.7의 범위이며, 보다 바람직하게 15.8≤νe/nD≤40.1의 범위이다.
에 의해 주어지고, ni는 상이한 파장에 대한 굴절률이며, nC는 굴절률 656㎚에 대한 굴절률이며, nD는 589㎚에 대한 굴절률이며, nF는 실온에서 측정한 486㎚에 대한 굴절률이며, 예를 들어 https://en.wikipedia.org/wiki/Abbe_number를 참조한다. 바람직하게, 비율 νe/nD는 13.9≤νe/nD≤44.7의 범위이며, 보다 바람직하게 15.8≤νe/nD≤40.1의 범위이다.
광 수신 섬유(116) 각각은 적어도 하나의 클래딩(168) 및 적어도 하나의 코어(166)를 포함할 수 있다. 곱 αΔn은 가시 및 근적외선 파장 범위에서, 바람직하게 656㎚, 589㎚ 또는 486㎚로부터 선택된 적어도 하나의 파장에서 적어도 하나의 파장에서 범위 0.0004dB/km≤αΔn≤110dB/km에 있으며, 여기서 α 감쇠 계수 및 Δn은 Δn=(n1 2-n2 2)/(2n1 2)를 갖는 굴절률 대비이고, n1은 최대 코어 굴절률이고, n2는 클래딩 굴절률이다. 바람직하게, 곱 αΔn은 범위 0.002dB/km≤αΔn≤23dB/km, 보다 바람직하게 범위 0.02dB/km≤αΔn≤11.26dB/km이다. 굴절률 대비 Δn은 범위 0.0015≤Δn≤0.285, 바람직하게 범위 0.002≤Δn≤0.2750, 보다 바람직하게 범위 0.003≤Δn≤0.25일 수 있다. 광 수신 섬유(116)의 감쇠 계수는 범위 0.2dB/km≤α≤420dB/km, 바람직하게 범위 0.25dB/km≤α≤320dB/km일 수 있다. 전송 장치(114)는 개구 영역 D1을 가질 수 있고, 광 수신 섬유 중 적어도 하나는 단면 영역 D2를 갖는 섬유 코어(166)를 가질 수 있으며, 여기서 비율 D1/D2는 범위 0.54≤D1/D2≤5087, 바람직하게 1.27≤D1/D2≤413, 보다 바람직하게 2.17≤D1/D2≤59.2일 수 있다. 광 수신 섬유(166) 중 적어도 하나의 코어의 직경 dcore는 범위 2.5㎛≤dcore≤10000㎛, 바람직하게 범위 7㎛≤dcore≤3000㎛, 보다 바람직하게 범위 10㎛≤dcore≤500㎛이다.
광 수신 섬유(116) 및/또는 전송 장치(114)는 예를 들어 초음파 테스트를 사용하여 실온에서 측정된 188 GPa 이하의 탄성 계수로도 표시되는 영 계수를 가질 수 있다. 바람직하게, 광 수신 섬유(116) 및/또는 전송 장치(114)는 167 GPa 이하, 보다 바람직하게 0.0001 GPa 내지 97 GPa 범위의 영 계수를 가질 수 있다. 광 수신 섬유(116) 및/또는 전송 장치(114)는 0.0001 GPa 이상, 바람직하게 0.007 GPa 이상, 보다 바람직하게 0.053 GPa 이상의 영 계수를 가질 수 있다.
각각의 광 수신 섬유(116)는 적어도 하나의 입구 면(118)을 가질 수 있다. 각각의 입구 면(118)의 기하학적 중심은 전송 장치(114)의 광 축(120)에 대해 수직으로 정렬될 수 있다. 광 수신 섬유(116) 중 적어도 하나는 물체(112)를 향하는 입구 면(118)을 가질 수 있다. 광 수신 섬유(116)는 물체(112)로부터 전송 장치(114) 뒤의 측정 헤드(110)로 전파되는 입사 광 빔(122)의 전파 방향으로 배열될 수 있다. 광 수신 섬유(116) 및 전송 장치(114)는, 광 빔(122)이 광 수신 섬유(116)에 충돌하기 전에 전송 장치(114)를 통과하도록 배열될 수 있다.
도 1a 및 도 1b에 도시된 바와 같이, 측정 헤드(110)는 적어도 하나의 스페이서 장치(124)를 포함할 수 있다. 스페이서 장치(123)는 적어도 하나의 전송 장치(114)와, 광 수신 섬유(116) 중 적어도 하나를 연결하도록 구성될 수 있다. 도 1a는 측정 헤드(110)가 렌즈와 같은 하나의 전송 장치(114)와, 2개의 광 수신 섬유(116)를 포함하는 실시예를 도시한다. 스페이서 장치는 전송 장치(114)를 광 수신 섬유(116) 모두에 부착하도록 구성될 수 있다. 도 1b는 측정 헤드(110)가 2개의 렌즈와 같은 2개의 전송 장치(114)와, 2개의 광 수신 섬유(116)를 포함하는 실시예를 도시한다. 스페이서 장치(124)는 각각의 전송 장치(114)를 광 수신 섬유(116) 중 하나와 연결하도록 구성될 수 있다. 스페이서 장치(124)는 중실 부피(Vs) 및 중공 부피(Vh)를 포함할 수 있다. 중실 부피는 스페이서 장치(124)가 구성되는 고체 재료의 부피에 의해 정의될 수 있다. 스페이서 장치의 볼록 껍질 부피는 스페이서 장치의 중실 부피 중 가장 작은 볼록 껍질 부피로 정의될 수 있다. 스페이서 장치의 중공 부피는 스페이서 장치의 볼록한 껍질 부피에서 스페이서 장치의 중실 부피를 뺀 값으로 정의될 수 있다. 예를 들어, 빈 부피는 고체 재료의 내부 에지에 의해 정의될 수 있다. 중실 부피와 중공 부피의 비(Vs/Vh)는 범위 0.013≤Vs/Vh≤547, 바람직하게 범위 0.047≤Vs/Vh≤87.6, 보다 바람직하게 범위 0.171≤Vs/Vh≤26.2일 수 있다.
도 1c의 실시예에서, 전송 장치(114)는 적어도 하나의 구배 인덱스(gradient index: GRIN) 렌즈(114)를 포함할 수 있다. 전송 장치(114) 및 광 수신 섬유(116)는 일체형으로 구성될 수 있다. 광 수신 섬유(116)는 굴절률의 차이가 더 큰 계면에서의 반사를 감소시키기 위해 폴리머 또는 접착제 등에 의해 전송 장치(114)에 부착될 수 있다.
광 수신 섬유(116)는 광 빔(122)이 전송 장치(114)와 전송 장치(114)의 초점 사이의 광 수신 섬유(116)에 충돌하도록 배열될 수 있다. 예를 들어, 전송 장치(114)와, 광 빔(122)이 광 수신 섬유(116)에 충돌하는 위치 사이의 광 축(120)에 평행한 방향의 거리는 초점 길이의 적어도 20%, 보다 바람직하게 초점 길이의 적어도 50%, 가장 바람직하게 초점 길이의 적어도 80%일 수 있다. 예를 들어, 광 빔(122)을 수신하는 광 수신 섬유(116) 중 적어도 하나의 입구 면(118)과 전송 장치(114) 사이의 광 축(120)에 평행한 방향에서의 거리는 초점 길이의 적어도 20%, 보다 바람직하게 초점 길이의 적어도 50%, 가장 바람직하게 초점 길이의 적어도 80%일 수 있다.
도 2에서, 측정 헤드(110)와, 적어도 하나의 물체(112)의 위치를 결정하기 위한 검출기(128)를 포함하는 키트(126)의 예시적인 실시예의 개략도가 도시된다. 이러한 실시예에서, 측정 헤드(110)는 전송 장치(114) 및 2개의 광 수신 섬유(116)를 포함한다. 측정 헤드(110)의 추가 설명을 위해, 도 1a 내지 도 1c의 설명을 참조한다. 또한, 측정 헤드(110)는 물체(112)를 조명하기 위한 적어도 하나의 조명원(130)을 포함할 수 있다. 예를 들어, 조명원(130)은 물체(112)를 조명하기 위한 조명 광 빔을 생성하도록 구성될 수 있다. 구체적으로, 조명원(130)은 적어도 하나의 레이저 및/또는 레이저 소스와 같은 적어도 하나의 광원(132)을 포함할 수 있다. 반도체 레이저와 같은 다양한 유형의 레이저가 사용될 수 있다. 추가적으로 또는 대안적으로, LED 및/또는 전구와 같은 비-레이저 광원이 사용될 수 있다. 조명원(130)은 인공 조명원, 특히 적어도 하나의 레이저 소스 및/또는 적어도 하나의 백열 램프 및/또는 적어도 하나의 반도체 광원, 예를 들어 적어도 하나의 발광 다이오드, 유기 및/또는 무기 발광 다이오드를 포함할 수 있다. 일 예로서, 조명원(130)에서 방출되는 광은 300 내지 1000㎚, 특히 500 내지 1000㎚의 파장을 가질 수 있다. 추가적으로 또는 대안적으로, 780㎚ 내지 3.0㎛ 범위와 같은 적외선 스펙트럼 범위의 광이 사용될 수 있다. 구체적으로, 실리콘 포토다이오드가 구체적으로 700㎚ 내지 1000㎚ 범위에서 적용 가능한 근적외선 영역의 부분의 광이 사용될 수 있다. 또한, 조명원(130)은 변조된 또는 비-변조된 광을 방출하도록 구성될 수 있다. 복수의 조명원(130)이 사용되는 경우, 상이한 조명원은 나중에 광 빔을 구별하기 위해 사용될 수 있는 상이한 변조 주파수를 가질 수 있다. 조명원(130)은 물체(112)를 조명하도록 광원(132)에 의해 생성된 광 빔(136)을 전송하도록 구성된 적어도 하나의 광 조명 섬유(134)를 포함할 수 있다. 광 빔(136)은 광 조명 섬유(134)의 출구 면(138)에서 광 조명 섬유(134)를 떠날 수 있다.
도 2에서, 물체(112)는 2개의 상이한 물체 거리에 대해 도시된다. 검출기(128)는 적어도 2개의 광학 센서(140), 예를 들어 제 1 광학 센서(142) 및 제 2 광학 센서(144)를 포함하며, 각각은 적어도 하나의 감광 영역(146)을 갖는다.
광 빔(122)에 의한 조명에 응답하여 제 1 광학 센서(142)는 제 1 센서 신호(s1)를 생성할 수 있는 반면, 제 2 광학 센서(144)는 제 2 센서 신호(s2)를 생성할 수 있다. 바람직하게, 광학 센서(140)는 선형 광학 센서이다. 센서 신호(s1 및 s2)는 검출기(128)의 평가 장치(148)에 제공된다. 평가 장치(148)는 특히 몫 신호를 평가함으로써 센서 신호로부터 결합된 신호(Q)를 유도하도록 구현된다. 센서 신호(s1 및 s2), 또는 이들의 배수 또는 선형 조합을 나눔으로써 유도된 결합된 신호(Q)가 물체(112)의 세로 좌표(z)에 대한 정보의 적어도 하나의 항목을 유도하기 위해 사용될 수 있다. 평가 장치(148)는 결합된 신호(Q)를 형성하기 위한 적어도 하나의 나눗셈장치(150), 및 일 예로서 결합된 신호(Q)로부터 적어도 하나의 세로 좌표(z)를 유도하기 위한 적어도 하나의 위치 평가 장치(152)를 구비할 수 있다. 평가 장치(148)는 하드웨어 및/또는 소프트웨어로 완전히 또는 부분적으로 구현될 수 있다는 점에 유의해야 한다. 따라서, 일 예로서, 컴포넌트(150, 152) 중 하나 이상은 적절한 소프트웨어 컴포넌트에 의해 구현될 수 있다.
조명원(130)은 범위 1.5·10-7㎟·sr≤G≤314㎟·sr, 바람직하게 범위 1·10-5㎟·sr≤G≤22㎟·sr, 보다 바람직하게 범위 3·10-4㎟·sr≤G≤3.3㎟·sr의 기하학적 확장(G)을 가질 수 있다. 조명원(130)의 기하학적 확장(G)은 G=A·Ω·n2로 정의될 수 있으며, 여기에서 A는 활성 방출 표면, 광 밸브, 광학 조리개 또는 A=AOF=π·r2 OF를 갖는 섬유 코어(166) 영역이 될 수 있는 표면의 영역이고, Ω는 광에 의해 대치되는 투영된 입체각이고, n은 매체의 굴절률이다. 절반 조리개 각도(θ)를 갖는 회전-대칭 광학 시스템의 경우, 기하학적 확장은 G=π·A·sin2(θ)n2로 정의될 수 있다.
광 수신 섬유의 경우, 발산 은 θmax=arcsin(NA/n)에 의해 얻어지며, 여기서 NA는 광 수신 섬유의 최대 개구 수이다. 절반 조리개 각도(θ) 및/또는 발산 각도(θmax)는 작을 수 있다. 특히, 절반 조리개 각도(θ)는 범위 0.01°≤θ≤42°; 바람직하게 범위 0.1°≤θ≤21°; 보다 바람직하게 범위 0.15°≤θ≤13°일 수 있으며 및/또는 발산 각도(θmax)는 범위 0.01°≤θmax≤42°; 바람직하게 범위 0.1°≤θmax≤21°; 보다 바람직하게 범위 0.05°≤θmax≤13°일 수 있다. 면적(A)은 작다. 특히, 면적(A)은 10㎟보다 작을 수 있고, 바람직하게 3㎟보다 작을 수 있으며, 더 바람직하게 1㎟보다 작을 수 있다.
측정 헤드(110)는 작은 베이스라인을 포함할 수 있다. 각각의 광 수신 섬유(116)는 적어도 하나의 섬유 클래딩(168) 및 적어도 하나의 코어(166)를 포함한다. 비율 d1/BL은 범위 0.0011≤d1/BL≤513일 수 있으며, 여기서 d1은 코어(166)의 직경이고, BL은 베이스라인이다. 바람직하게, 비율 d1/BL은 범위 0.0129≤d1/BL≤28, 보다 바람직하게 범위 0.185≤d1/BL≤7.1 범위이다. 베이스라인은 0보다 큰 확장을 가질 수 있다. 베이스라인은 범위 10㎛≤BL≤127000㎛, 바람직하게 범위 100㎛≤BL≤76200㎛, 보다 바람직하게 범위 500㎛≤BL≤25400㎛에 있을 수 있다.
측정 헤드(110)는 적어도 2개 이상의 섬유를 포함할 수 있다. 광 수신 섬유(116)는 적어도 하나의 다중갈래 광 수신 섬유, 특히 적어도 하나의 2갈래 광 수신 섬유일 수 있다. 도 3의 절단부에서, 측정 헤드(110)가 4개의 섬유를 포함할 수 있는 예시적인 실시예가 도시된다. 특히, 광 수신 섬유는 광 조명 섬유(134) 및 2개의 광 수신 섬유(116)를 포함할 수 있다. 도 3에 개략적으로 도시된 바와 같이, 광 수신 섬유(116)는 측정 헤드(110)의 입구 단부(154)에서 서로 가깝게 배열될 수 있고, 측정 헤드(110)의 출구 단부(156)에서 거리만큼 분리된 레그로 분할될 수 있다. 광 수신 섬유(116)는 동일한 특성을 갖는 섬유로 설계될 수 있거나, 또는 상이한 유형의 섬유일 수 있다. 측정 헤드(110)는 3개 이상의 섬유, 예를 들어 도 3에 도시된 바와 같이 4개의 섬유를 포함할 수 있으며, 여기서 제 4 섬유(158)는 추가 섬유(116)일 수 있다.
도 4a 내지 도 4mm은 측정 헤드(110)의 평면도 실시예를 도시한다. 측정 헤드(110)는 적어도 하나의 스페이서 장치(124), 예를 들어 적어도 하나의 금속 하우징 및/또는 플라스틱 하우징을 포함할 수 있다. 각각의 측정 헤드(110)는 복수의 섬유, 구체적으로 복수의 적어도 하나의 광 조명 섬유(134) 및/또는 적어도 하나의 광 수신 섬유(116)를 포함할 수 있다. 특히, 도 4a, 도 4b, 도 4f, 도 4g, 도 4h, 도 4l, 도 4r, 도 4m, 도 4n, 도 4r, 도 4s, 도 4x는 하나의 광 조명 섬유(134)와, 2개의 광 수신 섬유(116), 구체적으로 광 빔을 제 2 광학 센서(142)에 제공하도록 구성된 제 1 광 수신 섬유(160) 및 광 빔(122)을 제 2 광학 센서(144)에 제공하도록 구성된 제 2 광 수신 섬유(162)를 구비하는 측정 헤드(110)의 실시예를 도시한다. 측정 헤드(110)는 적어도 하나의 반경방향으로 배열된 또는 반경방향으로 대칭인 디자인을 포함할 수 있다. 예를 들어, 제 1 광 수신 섬유(160); 제 2 광 수신 섬유(162); 또는 광 조명 섬유(134)로 구성되는 그룹으로부터 선택된 적어도 2개의 요소는 동심으로 배열될 수 있고, 공통 중심 축을 갖고 및/또는 공유할 수 있다. 예를 들어, 도 4b, 도 4h 및 도 4n에 도시된 바와 같이, 제 1 광 수신 섬유(160), 제 2 광 수신 섬유(162) 및 광 조명 섬유(134)는 동심으로 배열될 수 있고, 공통 중심 축을 갖고 및/또는 공유할 수 있다. 반경방향으로 배열되거나 반경방향으로 대칭인 디자인의 다른 실시예가 가능하다. 예를 들어, 도 4gg, 도 4kk 및 도 4ll에 도시된 바와 같이, 제 1 광 수신 섬유(160); 제 2 광 수신 섬유(162); 또는 광 조명 섬유(134)로 구성되는 그룹으로부터 선택되는 복수의 적어도 하나의 요소는 제 1 광 수신 섬유(160); 제 2 광 수신 섬유(162); 또는 광 조명 섬유(134)로 구성되는 그룹으로부터 선택되는 적어도 하나의 다른 요소 둘레에 반경방향으로 배열될 수 있다. 반경방향으로 배열된 또는 반경방향으로 대칭 디자인은 특히 물체의 측정 지점에서 강한 흑백 대비에서 또는 오목한 또는 볼록한 표면의 측정을 위해 측정 값의 견고성을 향상시킬 수 있다. 도 4c, 도 4d, 도 4e, 도 4i, 도 4j, 도 4k, 도 4o, 도 4p, 도 4q, 도 4t, 도 4u, 도 4v, 도 4w, 도 4y, 도 4z 및 도 4aa 내지 도 4mm은 측정 헤드(110) 내의 광 조명 섬유(134), 제 1 수신 섬유(160) 및 제 2 광 수신 섬유(162)의 상이한 개수의 추가의 가능한 배열을 도시한다. 측정 헤드(110) 내의 섬유의 다른 배열이 가능하다.
측정 헤드(110)는 하나 이상의 전송 장치(114), 특히 콜리메이팅 렌즈를 포함한다. 도 5a 내지 도 5mm은 측정 헤드(110)에서 렌즈 배열의 실시예를 평면도로 도시한다. 도 5a 내지 도 5mm의 측정 헤드(110)의 섬유의 배열은 도 4a 내지 도 mm에 도시된 배열에 대응하고, 여기서 도 5a 및 도 5a1, 도 5c1 및 도 5c2에서도, 도 4a 및 도 4c의 섬유 배열에 대한 2개의 실시예 각각 도시된다. 명확성을 위해, 각 섬유의 도면부호는 도 4a 내지 도 4mm을 참조하도록 생략되었다. 도 5a, 도 5aa, 도 5bb, 도 5c2, 도 5e, 도 5ee, 도 5h, 도 5hh, 도 5jj, 도 5k, 도 5m, 도 5mm, 도 5o, 도 5r, 도 5v, 도 5y, 도 5z에 도시된 측정 헤드(110)는 모든 섬유의 전방에서 배치된 하나의 전송 장치(114)를 포함한다. 도 5a1, 도 5c1, 도 5dd, 도 5f, 도 5ff, 도 5g, 도 5i, 도 5kk, 도 5l, 도 5p, 도 5u, 도 5x는 섬유의 전방에서 2개 이상의 전송 장치(114)를 포함하는 측정 헤드(110)를 도시한다. 도 5b, 도 5d, 도 5cc, 도 5gg, 도 5ii, 도 5j, 도 5n, 도 5ll, 도 5s, 도 5t, 도 5w, 도 5q는 동일한 기능을 갖는 섬유를 위한 적어도 하나의 개별 렌즈(114)를 포함하는 측정 헤드(110)를 도시한다. 예를 들어, 도 5b, 도 5cc, 도 5d, 도 5ii, 도 5j, 도 5ll, 도 5t 및 도 5q에서, 측정 헤드(110)는 모든 섬유를 커버하는 전송 장치(114)와, 또한 단지 광 조명 섬유(134)를 커버하는 분리된 렌즈(114)를 포함한다. 예를 들어, 도 5gg에서, 측정 헤드(110)는 2개의 전송 장치(114)를 포함한다. 제 1 전송 장치(114)는 광 조명 섬유(134)와, 제 1 광 조명 섬유(134) 주위에 반경방향으로 배열된 복수의 제 1 광 수신 섬유(160)를 커버할 수 있고, 제 2 전송 장치(114)는 광 조명 섬유(134)와, 하나의 제 2 광 조명 섬유(134) 주위에 반경방향으로 배열된 복수의 제 2 광 수신 섬유(162)를 커버할 수 있다. 더욱이, 도 5gg에서, 조명 섬유(134)를 단지 그리고 추가로 커버하는 2개의 분리된 전송 장치(114)가 도시되어 있다. 예를 들어, 도 5n은, 제 1 전송 장치(114)가 모든 광 섬유를 커버할 수 있고, 제 2 개별 전송 장치(114)가 제 1 광 수신 섬유(160) 및 제 2 광 수신 섬유(162)를 커버할 수 있고, 제 3 개별 전송 장치(114)가 단지 제 1 광 수신 섬유(160)를 커버할 수 있는 실시예를 도시한다. 예를 들어, 도 5s는 3개의 전송 장치(114), 단지 제 2 광 수신 섬유(162)를 커버하는 제 1 전송 장치(114), 제 1 광 수신 섬유(160) 및 광 조명 섬유(134) 양자를 커버하는 제 2 전송 장치(114), 및 단지 제 1 광 수신 섬유(160)를 커버하는 제 3 전송 장치(114)를 구비하는 실시예를 도시한다. 예를 들어, 도 5w는 2개의 전송 장치(114), 모든 섬유를 커버하는 제 1 전송 장치(114) 및 제 1 광 수신 섬유(160) 및 제 2 광 수신 섬유(162)를 커버하는 적어도 하나의 개별 렌즈(114)를 포함하는 측정 헤드(110)를 도시한다. 제 1 측정 섬유 및/또는 제 2 측정 섬유 및/또는 조명 섬유의 광 경로, 및/또는 2개 이상의 전송 장치의 광 경로는 내부 반사를 회피하기 위해 스페이서 장치의 일부와 같은 기계적 수단에 의해 그리고 완전히 또는 부분적으로 불투명한 기계적 벽 또는 클래딩에 의해 완전히 또는 부분적으로 광학적으로 분리될 수 있다.
도 6a 내지 도 6d는 측정 헤드(110)에서 섬유 및 렌즈 배열의 실시예의 측면도를 도시한다. 도 6a는 도 4ff 및 도 5ff에 도시된 광 섬유 및 렌즈 배열에 대응한다. 측정 헤드(110)는 광 조명 섬유(134), 및 광 수신 섬유(116), 즉 적어도 하나의 제 1 광 수신 섬유(160) 및 적어도 하나의 제 2 광 수신 섬유(162)를 위한 별도의 전송 장치를 포함할 수 있다. 측정 헤드(110)는 하나의 광 조명 섬유(134)를 포함할 수 있다. 측정 헤드(110)는 특히 광 조명 섬유(134)로부터 변위된, 제 2 광 수신 섬유(162) 주위에 반경방향으로 배열된 6개의 제 1 광 수신 섬유(160)에 의해 둘러싸여 있는 하나의 제 2 광 수신 섬유(162)를 포함할 수 있다. 측정 헤드(110)는 광 조명 섬유(134)의 전방에 배치될 수 있는 제 1 전송 장치(114)와, 제 1 광 수신 섬유(160) 및 제 2 광 수신 섬유(162)를 커버할 수 있는 제 2 전송 장치(114)를 포함할 수 있다.
도 6b 내지 도 6d는 하나의 광 조명 섬유(134), 6개의 제 1 광 수신 섬유(160) 및 6개의 제 2 광 수신 섬유(162)를 포함하는 측정 헤드(110)의 실시예를 도시한다. 도 6b에서, 광 조명 섬유(134)가 6개의 제 1 광 수신 섬유(160)에 의해 반경방향으로 둘러싸인 중심에 배열되는 배열이 도시된다. 제 1 광 수신 섬유(160)는 6개의 제 2 광 수신 섬유(162)에 의해 반경방향으로 둘러싸일 수 있다. 측정 헤드(110)는 광 조명 섬유(134) 및 수신 섬유들을 위한 하나의 전송 장치(114)를 포함할 수 있다. 내부 반사가 전송 장치에서 생성되어 수신 광 섬유에 대한 신호 오프셋을 생성할 수 있다. 도 6b는 베이스라인이 없는 반경방향 배열의 실시예를 도시한다. 도 6c에서, 유사한 섬유 배열이 도시되어 있지만, 측정 헤드(110)는 광 조명 섬유(134) 및 수신 섬유들을 위한 별도의 전송 장치(114)를 포함할 수 있다. 이 실시예에서, 광 조명 섬유(134)는 내부 반사가 방지될 수 있도록 전송 장치(114)까지 안내될 수 있다. 이 실시예는 베이스라인이 없는 반경방향 배열을 도시한다. 도 6d는 광 조명 섬유(134)가 배열의 중심으로부터 변위되어 배열되는 섬유 배열을 도시한다. 이 실시예에서, 광 조명 섬유(134)는 내부 반사가 방지될 수 있도록 전송 장치(114)까지 안내될 수 있다.
도 7a 내지 도 7f는 섬유 단부에서 상이한 렌즈 배열을 도시한다. 전술한 바와 같이, 적어도 하나의 전송 장치(114)는 광 섬유의 단부에 배열될 수 있다. 전송 장치(114)는 하나의 광 섬유에 직접 부착되거나, 광 섬유의 다발에 부착될 수 있다. 대안적으로, 전송 장치(114)는 적어도 하나의 스페이서 장치(124)를 사용하여 광 섬유 또는 광 섬유의 다발에 부착될 수 있다. 도 7a는 광 섬유 또는 광 섬유의 다발을 도시한다. 도 7b는 적어도 하나의 오목 렌즈가 부착된 광 섬유 또는 광 섬유의 다발을 도시한다. 도 7c는 적어도 하나의 볼록 렌즈가 부착된 광 섬유 또는 광 섬유의 다발을 도시한다. 도 7d는 적어도 하나의 구면 렌즈가 부착된 광 섬유 또는 광 섬유의 다발을 도시한다. 도 7e는 적어도 하나의 원뿔형 렌즈 또는 적어도 하나의 팁-형상 렌즈가 부착된 광 섬유 또는 광학 섬유 다발을 도시한다. 도 7f는 적어도 하나의 프리즘 형상 렌즈, 특히 비회전 대칭 렌즈가 부착된 광 섬유 또는 광 섬유의 다발을 도시한다.
도 8a 내지 도 8e는 측정 헤드(110)의 추가 실시예를 도시한다. 도 8a의 렌즈 및 섬유 배열은 도 6a에 도시된 렌즈 및 섬유 배열에 대응한다. 도 8a에서, 또한 측정 헤드(110)는 전송 장치(114)를 광 수신 섬유(116)에 부착하도록 구성된 스페이서 장치(124)를 포함한다. 제 1 측정 섬유(160) 및/또는 제 2 측정 섬유(162) 및/또는 조명 섬유(134)의 광 경로, 및/또는 2개 이상의 전송 장치(114)의 광 경로는 내부 반사를 회피하기 위해 완전히 또는 부분적으로 불투명한 기계적 벽 또는 클래딩 등과 같은 기계적 수단에 의해 완전히 또는 부분적으로 광학적으로 분리될 수 있다. 기계적 수단에 의한 이러한 광학적 분리는 스페이서 장치(124)의 일부일 수 있다. 도 8b에서, 3개의 섬유를 포함하는 배열이 표시된다. 조명 섬유(134)는 광 수신 섬유(116)에 개별적으로 평행하게 배열될 수 있다. 광 수신 섬유(116)는 하나의 결합된 수신 섬유 입구 단부에 배열될 수 있다. 제 1 전송 장치(114)는 광 수신 섬유(116)의 결합된 수신 섬유 입구 단부의 전방에 배열될 수 있고, 제 2 전송 장치(114)는 조명 섬유(134)의 출구 단부의 전방에 배열될 수 있다. 결합된 수신 섬유 입구 단부는 제 1 측정 섬유(160) 및 제 2 측정 섬유(162)로 분할될 수 있다. 예를 들어, 횡단면도에서, 제 1 측정 섬유(160) 및 제 2 측정 섬유는 수평 경계에 의해 분리된 반원으로서 결합된 수신 섬유 입구 단부 내에 배열될 수 있다. 도 8c는 유사한 배열을 도시하지만, 도 8c의 실시예에서, 제 1 측정 섬유(160) 및 제 2 측정 섬유는 수직 경계에 의해 분리된 반원으로서 결합된 수신 섬유 입구 단부 내에 배열될 수 있다. 도 8d는 제 1 측정 섬유(160) 및 제 2 측정 섬유(162) 및 조명 섬유(134) 각각이 분리된 섬유로서 설계되는 배열을 도시한다. 제 1 전송 장치(114)는 제 1 측정 섬유(160)의 입구 단부의 전방에 배치될 수 있고, 제 2 전송 장치(114)는 제 2 측정 섬유(162) 및 제 3 전송 장치(114)의 입구 단부의 전방에 배치될 수 있고, 제 3 전송 장치(114)는 조명 섬유(134)의 출구 단부의 전방에 배치될 수 있다. 광 수신 섬유(116)의 입구 단부 및 조명 섬유(134)의 출구 단부는 평면 평행과 같은 동일한 평면에 배열될 수 있다. 전송 장치(114)는 평면-평행으로 배열될 수 있지만, 광 수신 섬유(116)의 입구 단부의 평면 및 조명 섬유(134)의 출구 단부의 평면과 비교하여 광 수신 섬유(116)의 입구 단부 및 조명 섬유(134)의 출구 단부의 평면으로부터 이격된 바와 같이 상이한 평면에 배열될 수 있다. 광 수신 섬유(116)의 입구 단부 및 조명 섬유(134)의 출구 단부의 평면, 및 전송 장치(114)의 평면은 평행한 평면일 수 있다. 조명 섬유(134)의 출구 단부 및 광 수신 섬유(116)의 입구 단부의 중심은 광 수신 섬유(116)의 입구 면 및 조명 섬유(134)의 출구 단부의 평면인 제 1 평면과, 제 1 평면에 직교하고 그리고 조명 섬유(134)의 출구 단부 및 광 수신 섬유(116)의 입구 단부의 중심을 연결하는 라인을 포함하는 제 2 평면과의 교차점에 있을 수 있다. 도 8e에서, 도 8d에서와 같이, 제 1 측정 섬유(160) 및 제 2 측정 섬유(162) 및 조명 섬유(134)는 분리된 섬유로 설계된다. 이 실시예에서, 제 1 전송 장치(114)는 광 수신 섬유(116)의 입구 단부의 전방에 배열될 수 있고 제 2 전송 장치(114)는 조명 섬유(134)의 출구 단부의 전방에 배열될 수 있다. 도 8d에서와 같이, 광 수신 섬유(116)의 입구 단부와 조명 섬유(134)의 출구 단부는 동일한 평면에 배열될 수 있다. 제 1 전송 장치(114) 및/또는 제 2 전송 장치(114)는 광 수신 섬유(116)의 입구 단부 및 조명 섬유(134)의 출구 단부의 평면에 대해 일정 각도 하에서와 같이 평행하지 않게 배열될 수 있다.
도 9는 풍경의 깊이 프로파일을 결정하기 위한 측정 헤드(110)의 추가 실시예를 도시한다. 도 9에서, 측정 헤드(110)가 하나의 제 2 광 수신 섬유(162) 및 제 2 광 수신 섬유(162) 주위에 배열된 6개의 제 1 광 수신 섬유(160)를 포함하는 실시예가 도시되어 있다. 구체적으로, 각각의 광 수신 섬유(116)는 적어도 2개의 단부, 즉 출구 단부로도 표시되는 원위 단부와, 또한 수용 단부로 표시되는 적어도 하나의 근위 단부를 가질 수 있다. 근위 단부는 측정 헤드(110)와 함께 배열되거나 및/또는 측정 헤드(110)에 부착될 수 있다. 각각의 근위 단부는 광 빔(122)을 각각의 광 수신 섬유(116)에 결합하도록 구성될 수 있다. 원위 단부는 광학 센서(140)에 더 가깝게 배열될 수 있고, 광 수신 섬유(116)를 통해 근위 단부로부터 원위 단부로 이동하는 광 빔이 원위 단부에서 광 수신 섬유(116)를 떠나고 그리고 각각의 광학 센서(140)를 조명하도록 배열될 수 있다.
측정 헤드(110)는 적어도 하나의 전송 장치(114)를 더 포함할 수 있다. 전송 장치(114)는 광 수신 섬유(116)의 전방에 배치될 수 있다. 전송 장치(114)는 근위 단부에 광 빔(122)을 집중시키도록 구성될 수 있다. 예를 들어, 전송 장치(114)는 적어도 하나의 오목 렌즈; 적어도 하나의 볼록 렌즈; 적어도 하나의 구면 렌즈; 적어도 하나의 팁 형상 렌즈; 적어도 하나의 프리즘 형상 렌즈, 특히 비회전 대칭 렌즈로 구성되는 그룹으로부터 선택된 적어도 하나의 요소를 포함할 수 있다. 또한, 측정 헤드(110)는 전송 장치(114)를 광 수신 섬유(116)에 부착하도록 구성된 적어도 하나의 스페이서 장치(124)를 포함할 수 있다. 제 1 측정 섬유(160) 및 제 2 측정 섬유(162)의 광 경로는 내부 반사를 회피하기 위해 완전히 또는 부분적으로 불투명한 기계적 벽 또는 클래딩 등과 같은 기계적 수단에 의해 완전히 또는 부분적으로 광학적으로 분리될 수 있다. 기계적 수단에 의한 이러한 광학적 분리는 스페이서 장치(124)의 일부일 수 있다.
측정 헤드(110)는 적어도 하나의 광 조명 섬유(134)를 포함할 수 있다. 광 조명 섬유(134)는 적어도 하나의 광 빔을 수신하도록 구성된 적어도 하나의 제 1 단부 및 적어도 하나의 광 빔이 물체(112)의 조명을 위해 광 조명 섬유(134)를 떠나는 적어도 하나의 제 2 단부를 포함할 수 있다. 광 조명 섬유(134)의 적어도 제 2 단부는 측정 헤드(110) 내에 배열될 수 있고 및/또는 측정 헤드(110)에 부착될 수 있다. 광 조명 섬유(134)는 예를 들어, 광 수신 섬유(116)와 함께 번들로 광 수신 섬유(116)의 확장 방향에 평행하게 배열될 수 있다. 검출기는 광 조명 섬유(134)의 전방에 배열될 수 있는 적어도 하나의 추가 전송 장치(110)를 포함할 수 있다.
측정 헤드(110)는 관심 영역을 스캔하기 위해 측정 헤드(110)를 이동시키도록 구성된 적어도 하나의 액추에이터(164)를 포함할 수 있다. 구체적으로, 액추에이터(164)는 광 수신 섬유(116) 및/또는 광 조명 섬유(134)에 부착 및/또는 결합 및/또는 연결될 수 있고, 광 수신 섬유(116) 및/또는 광 조명 섬유(134)를 이동, 특히 진동시키는 힘을 생성하도록 구성될 수 있다. 따라서, 광 수신 섬유(116) 및/또는 광 조명 섬유(134)를 구동함으로써, 측정 헤드(110)가 이동한다. 액추에이터(164)는 광 수신 섬유(116) 및/또는 광 조명 섬유(134)의 고유 공진 주파수의 고조파에 대응하는 힘을 생성하도록 구성될 수 있다. 액추에이터(164)는 적어도 하나의 전기기계 액추에이터 및/또는 적어도 하나의 피에조 액추에이터를 포함할 수 있다. 피에조 액추에이터는 적어도 하나의 피에조세라믹 액추에이터; 적어도 하나의 압전 액추에이터로 구성되는 그룹으로부터 선택된 적어도 하나의 액추에이터를 포함할 수 있다. 액추에이터(164)는 측정 헤드(110), 특히 광 조명 섬유(134) 및/또는 광 수신 섬유(116)가 진동하게 하도록 구성될 수 있다. 액추에이터(164)는 선형 스캔 및/또는 반경방향 스캔 및/또는 나선형 스캔에서 측정 헤드(110)를 이동시키도록 구성될 수 있다. 도 9에서, 측정 헤드(110)의 예시적인 움직임이 도시되어 있다. 예를 들어, 액추에이터(164)는 측정 헤드(110)가 상방향 및 하방향으로 이동하도록 광 수신 섬유(116)에 힘을 생성하도록 구성될 수 있다. 예를 들어, 액추에이터(164)는 측정 헤드(110)가 미리정의된 반경을 갖는 궤도에서 이동하도록 광 수신 섬유(116)에 힘을 생성하도록 구성될 수 있다. 반경은 조정할 수 있다. 예를 들어, 액추에이터(164)는 측정 헤드(110)가 교대로 감소 또는 증가하는 반경과 같은 나선형으로 이동하도록 힘을 생성하도록 구성될 수 있다.
도 10은 측정 헤드(110)의 추가 실시예를 도시한다. 도 10은 측정 헤드(110)의 정면도를 도시한다. 이 실시예에서, 측정 헤드(110)는 광 조명 섬유(134) 주위에 반경방향으로 배열된 복수의 제 1 측정 섬유(160) 및 복수의 제 2 측정 섬유(162)를 표시할 수 있다. 광 조명 섬유(134)는 액추에이터(164)에 의해 이동 가능할 수 있다. 광 조명 섬유(134)는, 제 1 측정 섬유(160) 및 제 2 측정 섬유(162)에 대해 나선형 이동 및/또는 원형 이동을 수행하고, 그리고 그에 따라 나선형 또는 원형 스캔을 허용하도록 구성될 수 있다. 평가 장치(158)는 광 조명 섬유(134)의 위치를 보정하고 그리고 광 조명 섬유(134)의 위치에 따라 결합된 신호(Q)로부터의 거리를 평가하도록 구성될 수 있다. 측정 헤드(110)는 광 수신 섬유(116)의 전방에 배치될 수 있는 적어도 하나의 추가 전송 장치(114)를 포함할 수 있다.
도 11은 광 수신 섬유(116)의 일 실시예의 매우 개략도를 도시한다. 각각의 광 수신 섬유(116)는 적어도 하나의 섬유 클래딩(168)에 의해 둘러싸인 적어도 하나의 섬유 코어(166)를 포함할 수 있다. 섬유 클래딩(168)은 섬유 코어(166)로서 더 낮은 굴절률을 가질 수 있다. 섬유 클래딩(168)은 또한 이중 또는 다중 클래딩일 수 있다. 섬유 클래딩(168)은 버퍼(170) 및 아우터 재킷(172)에 의해 둘러싸일 수 있다. 섬유 클래딩(168)은 손상 및 습기로부터 광 수신 섬유(116)를 보호하도록 구성된 버퍼(170)에 의해 코팅될 수 있다. 버퍼(170)는 적어도 하나의 UV-경화된 우레탄 아크릴레이트 복합재 및/또는 적어도 하나의 폴리이미드 재료를 포함할 수 있다.
측정 헤드(110)의 측정 안정성을 평가하기 위해, 실험 설정에서 각 25㎸를 갖는 20㎜ 스파크 갭이 측정 헤드(110)까지 20㎜의 거리에 측정 헤드(110)의 각 측면에 배치되었다. 스파크는 측정 헤드(110)의 각 측면에서 교대로 발사되었다. 측정 헤드(110)를 포함하는 광 수신 섬유(116)의 200㎜의 길이에서, 스파크 갭은 온도 챔버에 배치되고, 최대 온도(Tmax)까지 20K의 단계로 가열된다. 50% 반사율인 타겟을 50㎜ 거리에 배치했다. 실험은 상이한 재료의 광 섬유와 전송 장치에 대해 수행되었다. 예를 들어, 실리카, 아크릴 및 사파이어 섬유가 테스트되었다. 전송 장치의 렌즈 재료는 다이아몬드, 사파이어, 플로트 유리 CaF2, 테플론, 아크릴 또는 실리카였다. 측정 오차(Δz)는 10.000 측정에 대한 표준 편차로 결정되었다. 하기 표의 결과는 낮은 비율에 비해 εr/k>0.362(m·K)/W에 대해 더 낮은 측정 오차(Δz)를 명확하게 나타낸다.
| 섬유 재료 | 렌즈 재료 | ℃의 Tmax | ㎜의 Δz | (m·K)/W의 εr/k |
| 실리카 | 다이아몬드 | 180 | 3.3 | 0.006(렌즈) |
| 실리카 | 사파이어 | 180 | 2.9 | 0.25(렌즈) |
| 실리카 | 플로트 유리 | 180 | 0.8 | 4(렌즈) |
| 실리카 | CaF2 | 180 | 3.7 | 0.15(렌즈) |
| 실리카 | 테플론 | 180 | 1.3 | 8.4(렌즈) |
| 실리카 | 아크릴 | 180 | 1.2 | 13.5(렌즈) |
| 아크릴 | 아크릴 | 180 | 1.4 | 13.5(렌즈) |
| 사파이어 | 사파이어 | 180 | 3.0 | 0.25(렌즈) |
| 사파이어 | 실리카 | 180 | 2.5 | 0.25(렌즈) |
110: 측정 헤드
112: 물체
114: 전송 장치
116: 광 수신 섬유
118: 입구 면
120: 광 축
122: 광 빔
124: 스페이서 장치
126: 키트
128: 검출기
130: 조명원
132: 광원
134: 광 조명 섬유
136: 광 빔
138: 출구 면
140: 광학 센서
142: 제 1 광학 센서
144: 제 2 광학 센서
146: 감광 영역
148: 평가 장치
150: 나눗셈장치
152: 위치 평가 장치
154: 입구 단부
156: 출구 단부
158: 제 4 섬유
160: 제 1 광 수신 섬유
162: 제 2 광 수신 섬유
164: 액추에이터
166: 코어
168: 클래딩
170: 버퍼
172: 아우터 재킷
112: 물체
114: 전송 장치
116: 광 수신 섬유
118: 입구 면
120: 광 축
122: 광 빔
124: 스페이서 장치
126: 키트
128: 검출기
130: 조명원
132: 광원
134: 광 조명 섬유
136: 광 빔
138: 출구 면
140: 광학 센서
142: 제 1 광학 센서
144: 제 2 광학 센서
146: 감광 영역
148: 평가 장치
150: 나눗셈장치
152: 위치 평가 장치
154: 입구 단부
156: 출구 단부
158: 제 4 섬유
160: 제 1 광 수신 섬유
162: 제 2 광 수신 섬유
164: 액추에이터
166: 코어
168: 클래딩
170: 버퍼
172: 아우터 재킷
Claims (20)
- 적어도 하나의 물체(112)의 위치를 결정하기 위한 측정 헤드(110)에 있어서,
- 적어도 하나의 전송 장치(114) ― 상기 전송 장치(114)는 물체(112)로부터 측정 헤드(110)로 전파하는 적어도 하나의 입사 광 빔(122)에 응답하여 적어도 하나의 초점 길이를 가짐 ―; 및
- 적어도 2개의 광 수신 섬유(116) ― 상기 광 수신 섬유(116) 및/또는 전송 장치(114) 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 가지며, 여기서 k는 열전도율이고, εr은 비유전율임 ―를 포함하는
측정 헤드. - 제 1 항에 있어서,
상기 광 수신 섬유(116) 및/또는 전송 장치(114) 중 적어도 하나는 비율 εr/k≥0.743(m·K)/W를 가지며, 바람직하게 비율은 εr/k≥1.133(m·K)/W인
측정 헤드. - 제 1 항 또는 제 2 항에 있어서,
비율 εr/k은 범위 0.362(m·K)/W≤εr/k≤1854(m·K)/W이며, 바람직하게 비율 εr/k은 범위 0.743(m·K)/W≤εr/k≤194(m·K)/W이며, 보다 바람직하게 비율 εr/k은 범위 1.133(m·K)/W≤εr/k≤88.7(m·K)/W인
측정 헤드. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 전송 장치(114)는 범위 9.05≤ve/nD≤77.3의 비율 ve/nD를 가지며, 여기서 ve는 아베-수(Abbe-number)이고, nD는 굴절률이며, 아베-수 ve는로 주어지며, ni는 상이한 파장에 대한 굴절률이며, nC는 656㎚에 대한 굴절률이며, nD는 589㎚에 대한 굴절률이며, nF는 486㎚에 대한 굴절률이며, 바람직하게 비율은 13.9≤νe/nD≤44.7의 범위이며, 보다 바람직하게 15.8≤νe/nD≤40.1의 범위인
측정 헤드. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
곱 αΔn은 가시 및 근적외선 파장 범위에서 적어도 하나의 파장에서, 바람직하게 656㎚, 589㎚ 또는 486㎚에서 선택된 적어도 하나의 파장에서 αΔn≤110dB/km이며, 여기서 α는 감쇠 계수이고, Δn은 Δn=(n1 2-n2 2)/(2n1 2)을 갖는 굴절률 대비이며, n1은 최대 코어 굴절률이고, n2는 클래딩 굴절률인
측정 헤드. - 제 5 항에 있어서,
곱 αΔn은 αΔn≤23dB/km, 바람직하게 αΔn≤11.26dB/km인
측정 헤드. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 전송 장치(114)는 개구 면적(D1)을 가지며, 상기 광 수신 섬유(116) 중 적어도 하나는 단면적(D2)을 갖는 섬유 코어(166)를 가지며, 비율 D1/D2는 범위 0.54≤D1/D2≤5087, 바람직하게 1.27≤D1/D2≤413, 보다 바람직하게 2.17≤D1/D2≤59.2인
측정 헤드. - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
상기 측정 헤드(110)는 적어도 하나의 스페이서 장치(124)를 포함하고, 상기 스페이서 장치(124)는 적어도 하나의 전송 장치(114)와, 광 수신 섬유(116) 중 적어도 하나를 연결하도록 구성되는
측정 헤드. - 제 8 항에 있어서,
상기 스페이서 장치(124)는 중실 부피(Vs) 및 중공 부피(Vh)를 포함하며, 여기서 중실 부피와 중공 부피의 비율 Vs/Vh는 범위 0.013≤Vs/Vh≤547, 바람직하게 범위 0.047≤Vs/Vh≤87.6, 보다 바람직하게 범위 0.171≤Vs/Vh≤26.2인
측정 헤드. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
상기 측정 헤드(110)는 물체(112)를 조명하기 위한 조명원(130)을 더 포함하고, 상기 조명원(130)은 범위 1.5·10-7㎟·sr≤G≤314㎟·sr, 바람직하게 범위 1·10-5㎟·sr≤G≤22㎟·sr, 보다 바람직하게 범위 3·10-4㎟·sr≤G≤3.3㎟·sr의 기하학적 확장(G)을 갖는
측정 헤드. - 제 9 항 또는 제 10 항에 있어서,
각각의 광 수신 섬유(116)는 적어도 하나의 섬유 클래딩(168) 및 적어도 하나의 코어(166)를 포함하며, 여기서 비율 d1/BL은 범위 0.0011≤d1/BL≤513이며, 여기서 d1은 코어(166)의 직경이며, BL은 베이스라인이며, 바람직하게 비율 d1/BL은 범위 0.0129≤d1/BL≤28, 보다 바람직하게 범위 0.185≤d1/BL≤7.1인
측정 헤드. - 제 1 항 내지 제 11 항 중 어느 한 항에 있어서,
각각의 광 수신 섬유(116)는 적어도 하나의 입구 면(118)을 가지며, 각각의 입구 면(118)의 기하학적 중심은 전송 장치(114)의 광 축(120)에 대해 수직으로 정렬되는
측정 헤드. - 제 1 항 내지 제 12 항 중 어느 한 항에 있어서,
상기 광 수신 섬유(116) 중 적어도 하나는 성형 및/또는 구조화된 입구(118) 및/또는 출구 면을 갖는 구조화된 섬유인
측정 헤드. - 제 1 항 내지 제 13 항 중 어느 한 항에 있어서,
상기 측정 헤드(110)는 관심 영역을 스캔하기 위해 측정 헤드(110)를 이동시키도록 구성된 적어도 하나의 액추에이터(164)를 포함하는
측정 헤드. - 제 1 항 내지 제 14 항 중 어느 한 항에 기재된 적어도 하나의 측정 헤드(110) 및 적어도 하나의 물체(112)의 위치를 결정하기 위한 검출기(128)를 포함하는 키트(126)에 있어서,
상기 검출기(128)는:
- 적어도 2개의 광학 센서(140) ― 각각의 광학 센서(140)는 적어도 하나의 감광 영역(146)을 가지며, 각 광학 센서(140)는 측정 헤드(110)의 광 수신 섬유(116) 중 적어도 하나를 통과한 광 빔에 의한 각각의 감광 영역(146)의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 설계됨 ―; 및
- 센서 신호로부터 결합된 신호(Q)를 평가함으로써 물체(112)의 적어도 하나의 세로 좌표(z)를 결정하도록 구성되는 적어도 하나의 평가 장치(148)를 포함하는
키트. - 제 15 항에 있어서,
상기 평가 장치(148)는 센서 신호를 나누는 것, 센서 신호의 배수를 나누는 것, 센서 신호의 선형 조합을 나누는 것 중 하나 이상에 의해 결합된 신호(Q)를 유도하도록 구성되는
키트. - 제 16 항에 있어서,
상기 평가 장치(148)는 세로 좌표를 결정하기 위해 결합된 신호(Q)와 세로 좌표 사이의 적어도 하나의 사전결정된 관계를 사용하도록 구성되는
키트. - 키트를 기재하는 제 15 항 내지 제 17 항 중 어느 한 항에 있어서,
상기 광학 센서(140)는 이중-셀 또는 사분면 다이오드의 부분 다이오드이고 및/또는 적어도 하나의 CMOS 센서를 포함하는
키트. - 키트를 기재하는 제 15 항 내지 제 18 항 중 어느 한 항에 기재된 키트(126)를 사용하여 적어도 하나의 물체(112)의 위치를 결정하는 방법에 있어서,
ⅰ) 적어도 하나의 측정 헤드(110)를 제공하는 단계 ― 상기 측정 헤드(110)는:
- 적어도 하나의 전송 장치(114) ― 상기 전송 장치(114)는 물체(112)로부터 측정 헤드(110)로 전파하는 적어도 하나의 입사 광 빔(122)에 응답하여 적어도 하나의 초점 길이를 가짐 ―; 및
- 적어도 2개의 광 수신 섬유(116) ― 상기 광 수신 섬유(116) 및/또는 전송 장치(114) 중 적어도 하나는 비율 εr/k≥0.362(m·K)/W를 가지며, 여기서 k는 열전도율이고, εr은 비유전율임 ―를 포함함 ―;
ⅱ) 적어도 하나의 검출기(128)를 제공하는 단계 ― 상기 검출기(128)는 적어도 2개의 광학 센서(140)를 포함하며, 각 광학 센서(140)는 적어도 하나의 감광 영역(146)을 가지며, 각각의 광학 센서(140)는 측정 헤드(110)의 광 수신 섬유(116) 중 적어도 하나를 통과한 광 빔에 의한 각각의 감광 영역(146)의 조명에 응답하여 적어도 하나의 센서 신호를 생성하도록 설계됨 ―;
ⅲ) 적어도 하나의 광 수신 섬유(116)를 통과한 적어도 하나의 광 빔으로 검출기(128)의 적어도 2개의 광학 센서(140)의 각 감광 영역(146)을 조명하며, 이에 의해 각각의 감광 영역(146)은 적어도 하나의 센서 신호를 생성하는 단계 ―; 및
ⅳ) 센서 신호를 평가하며, 이에 의해 물체(112)의 적어도 하나의 세로 좌표(z)를 결정하는 단계 ― 평가는 센서 신호의 결합된 신호(Q)를 유도하는 것을 포함함 ―를 포함하는
물체 위치 결정 방법. - 측정 헤드에 관한 제 1 항 내지 제 14 항 중 어느 한 항에 따른 측정 헤드(110)의 용도에 있어서,
사용 목적을 위해, 교통 기술에서의 위치 측정; 엔터테인먼트 응용; 광학 데이터 저장 응용; 보안 응용; 감시 응용; 안전 응용; 인간-기계 인터페이스 응용; 물류 응용; 내시경 응용; 의료 응용; 추적 응용; 사진 응용; 머신 비전 응용; 로봇 응용; 품질 관리 응용; 3D 프린팅 응용; 증강 현실 응용; 제조 응용; 광학 데이터 저장 및 판독과 조합된 용도로 구성되는 그룹으로부터 선택되는
측정 헤드의 용도.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18190749 | 2018-08-24 | ||
| EP18190749.4 | 2018-08-24 | ||
| PCT/EP2019/072622 WO2020039084A1 (en) | 2018-08-24 | 2019-08-23 | A measurement head for determining a position of at least one object |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20210046044A true KR20210046044A (ko) | 2021-04-27 |
Family
ID=63405075
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217008098A KR20210046044A (ko) | 2018-08-24 | 2019-08-23 | 적어도 하나의 물체의 위치를 결정하기 위한 측정 헤드 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20210364610A1 (ko) |
| EP (1) | EP3841351A1 (ko) |
| JP (1) | JP2021535407A (ko) |
| KR (1) | KR20210046044A (ko) |
| CN (1) | CN113015882A (ko) |
| WO (1) | WO2020039084A1 (ko) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11143736B2 (en) | 2017-11-17 | 2021-10-12 | Trinamix Gmbh | Detector for determining a position of at least one object comprising at least one device to determine relative spatial constellation from a longitudinal coordinate of the object and the positions of reflection image and reference image |
| DE102018128962A1 (de) * | 2018-11-19 | 2020-05-20 | Rheinmetall Waffe Munition Gmbh | Verfahren zur Bestimmung der Position eines Objektes, Vorrichtung zur Bestimmung der Position eines Objektes und System |
| US20240263937A1 (en) | 2021-07-02 | 2024-08-08 | Trinamix Gmbh | Measurement head |
| CN114413750B (zh) * | 2021-12-01 | 2023-09-15 | 广西交科集团有限公司 | 基于激光散射光斑的定位传感器、定位系统及定位方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6786099B2 (en) * | 2002-02-14 | 2004-09-07 | Kla-Tencor Technologies Corporation | Surface photo-acoustic film measurement device and technique |
| JP2005287900A (ja) * | 2004-04-01 | 2005-10-20 | Hamamatsu Univ School Of Medicine | 内視鏡 |
| KR101496883B1 (ko) * | 2010-02-23 | 2015-03-02 | 에이에스엠엘 네델란즈 비.브이. | 리소그래피 장치 및 디바이스 제조 방법 |
| CN106019305B (zh) | 2011-02-15 | 2019-10-11 | 巴斯夫欧洲公司 | 用于光学检测至少一种物体的检测器 |
| JP2013186808A (ja) * | 2012-03-09 | 2013-09-19 | Lintec Corp | タッチパネル部材貼付用粘着剤、タッチパネル部材貼付用粘着シート、及びタッチパネル装置 |
| GB2501542A (en) * | 2012-04-28 | 2013-10-30 | Bae Systems Plc | Abnormal behaviour detection in video or image surveillance data |
| CA2890066C (en) * | 2012-11-01 | 2021-11-09 | Sio2 Medical Products, Inc. | Coating inspection method |
| JP6415447B2 (ja) | 2012-12-19 | 2018-10-31 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 1つ以上の物体を光学的に検出するための検出器 |
| JP2016529474A (ja) | 2013-06-13 | 2016-09-23 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 少なくとも1つの物体を光学的に検出する検出器 |
| JP2016015248A (ja) * | 2014-07-02 | 2016-01-28 | 株式会社豊田自動織機 | 蓄電装置ユニット |
| US11540875B2 (en) * | 2014-07-16 | 2023-01-03 | Microcube, Llc | Minimally invasive access channels into bodily regions |
| US9593941B2 (en) | 2014-09-24 | 2017-03-14 | Hood Technology Corporation | Clearance detection system and method using frequency identification |
| JP2019534069A (ja) | 2016-09-23 | 2019-11-28 | キヤノン ユーエスエイ, インコーポレイテッドCanon U.S.A., Inc | スペクトル符号化内視鏡検査装置および方法 |
| KR102502094B1 (ko) | 2016-11-17 | 2023-02-21 | 트리나미엑스 게엠베하 | 적어도 하나의 피사체를 광학적으로 검출하기 위한 검출기 |
-
2019
- 2019-08-23 KR KR1020217008098A patent/KR20210046044A/ko not_active Application Discontinuation
- 2019-08-23 CN CN201980066485.5A patent/CN113015882A/zh active Pending
- 2019-08-23 JP JP2021534824A patent/JP2021535407A/ja active Pending
- 2019-08-23 US US17/270,525 patent/US20210364610A1/en active Pending
- 2019-08-23 WO PCT/EP2019/072622 patent/WO2020039084A1/en unknown
- 2019-08-23 EP EP19756373.7A patent/EP3841351A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20210364610A1 (en) | 2021-11-25 |
| CN113015882A (zh) | 2021-06-22 |
| EP3841351A1 (en) | 2021-06-30 |
| JP2021535407A (ja) | 2021-12-16 |
| WO2020039084A1 (en) | 2020-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7374195B2 (ja) | 少なくとも1つの物体の位置を決定するための検出器 | |
| KR20210046044A (ko) | 적어도 하나의 물체의 위치를 결정하기 위한 측정 헤드 | |
| JP7387712B2 (ja) | 少なくとも1つの領域を光学的に監視する装置及び方法 | |
| JP2020521954A5 (ko) | ||
| KR101691156B1 (ko) | 조명 광학계와 결상 광학계가 통합된 광학계 및 이를 포함하는 3차원 영상 획득 장치 | |
| CN103576133A (zh) | 距离测量系统 | |
| KR20190117578A (ko) | 광학 애플리케이션용 장치, 분광계 시스템, 및 광학 애플리케이션용 장치 생산 방법 | |
| KR101439411B1 (ko) | 전방위 렌즈 모듈 | |
| KR20210033528A (ko) | 적어도 하나의 오브젝트의 위치를 결정하기 위한 검출기 | |
| US8413902B2 (en) | Image acquisition device and optical component thereof | |
| CN111290061B (zh) | 光学扩散片、光源装置及距离测量装置 | |
| TW201007143A (en) | Spectral detector with angular resolution using refractive and reflective structures | |
| KR102072623B1 (ko) | 광학 빔 성형 유닛, 거리 측정 디바이스 및 레이저 조명기 | |
| KR102008455B1 (ko) | 애너모픽 광학면 기반의 광전송 모듈 | |
| KR101988602B1 (ko) | Tof용 렌즈조립체 | |
| US20240263937A1 (en) | Measurement head | |
| RU2650705C1 (ru) | Оптическая система для фокусировки излучения | |
| CN111487223B (zh) | 使用反射几何的光学装置 | |
| US7505151B2 (en) | Arrangement for the optical distance determination of a reflecting surface | |
| KR102708546B1 (ko) | 광출력모듈 | |
| JP2017110965A (ja) | 光波距離測定装置 | |
| Semenets et al. | Laser system for recording optics | |
| RU2017181C1 (ru) | Устройство для формирования и отслеживания оптического пучка | |
| CN115079129A (zh) | 光学感测系统 | |
| JP2004144694A (ja) | 光学式検出器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITB | Written withdrawal of application |