この問題は、独立特許請求項の特徴を備えた本発明によって解決される。個別に又は組み合わせて実現することができる本発明の有利な展開は、従属請求項及び/又は以下の明細書及び詳細な実施形態に示されている。
以下で使用される場合、「有する」、「備える」、又は「含む」という用語、又はそれらの任意の文法上の変形は、非排他的な方法で使用される。したがって、これらの用語は、これらの用語によって導入された特徴の他に、この文脈で説明されているものにさらなる特徴が存在しない状況と、1つ以上のさらなる特徴が存在する状況の両方を指し得る。一例として、「AはBを有する」、「AはBを備える」、及び「AはBを含む」という表現は、B以外にAに他の要素が存在しない状況(つまり、Aは専らかつ排他的にBを有する状況)と、Bに加えて、1つ以上の要素、例えば要素C、要素CとD、又はさらに要素などが実体Aに存在する状況の双方を指し得る。
さらに、「少なくとも1つ」、「1つ以上」という用語、又は、特徴もしくは要素が1回以上存在し得ることを示す同様の表現は、典型的には、それぞれの特徴又は要素を導入するときに1回だけ使用されることに留意されたい。以下では、ほとんどの場合、それぞれの特徴又は要素を参照するときに、「少なくとも1つ」又は「1つ以上」という表現は、それらの特徴又は要素が1回以上現れるという事実にもかかわらず、繰り返されないことに留意されたい。
さらに、以下で使用される場合、「好ましくは」、「より好ましくは」、「特に」、「さらに特に」、「具体的に」、「より具体的に」という用語、又は、同様の用語は、代替の可能性を制限することなく、任意の特徴に関連して使用される。したがって、これらの用語によって導入される特徴は、任意の特徴であり、如何なる意味でも特許請求の範囲を限定することを意図するものではない。本発明は、当業者であれば認識するように、代替的特徴を用いて実施することができる。同様に、「本発明の一実施形態では」又は同様の表現によって導入される特徴は、本発明の代替実施形態に関するいかなる制限もなく、本発明の範囲に関するいかなる制限もなく、及び、そのような方法で導入される特徴を本発明の他の任意の又は非任意の特徴と組み合わせる可能性に関するいかなる制限もなく、任意の特徴であることが意図されている。
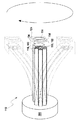
本発明の第1態様では、少なくとも1つの物体の位置を決定するための測定ヘッドが開示されている。本明細書で使用される場合、「測定ヘッド」という用語は、物体からの少なくとも1つの光ビームを受けるように構成された少なくとも1つの測定手段を指す。測定ヘッドは、以下に詳細に概説されるように、少なくとも2つの光測定ファイバなど、少なくとも2つの光受信ファイバなどの測定ヘッドのさらなる構成要素を収容するように構成された少なくとも1つのスペーサ装置を含んでいてよい。測定ヘッドは、特に光受信ファイバの配置から見て、少なくとも1つの放射状に配置された、又は放射状に対称でさえある設計を有していてよい。放射状に配置された又は放射状に対称でさえある設計は、特に、物体の測定点における強い白黒コントラストにおいて、又は凹面又は凸面の測定のために、測定値のロバスト性を高めることを可能にすることができる。
本明細書で使用される場合、「物体」という用語は、少なくとも1つの光ビームを放出する点又は領域を指す。光ビームは、物体及び/又は物体に一体化又は取り付けられた光ビームを放出する少なくとも1つの照射源などの物体から発生してもよく、又は直接又は間接的に物体を照射する照射源などの別の照射源から発生してもよく、そこでは光ビームは物体によって反射又は散乱される。本明細書で使用される場合、「位置」という用語は、空間での物体及び/又は物体の少なくとも一部の位置及び/又は方向に関する少なくとも1つの情報項目を指す。したがって、該少なくとも1つの情報項目は、物体の少なくとも1つの点と少なくとも1つの測定ヘッドの少なくとも1つの距離を示すことができる。以下でさらに詳細に説明するように、距離は、縦方向座標であってもよく、又は物体の点の縦方向座標を決定するのに寄与するものでもよい。追加的に又は代替的に、物体及び/又は物体の少なくとも一部の位置及び/又は方向に関する1つ以上の他の情報項目が決定されることができる。一例として、さらに、物体及び/又は物体の少なくとも一部の、少なくとも1つの横方向座標が決定されることができる。したがって、物体の位置は、物体及び/又は物体の少なくとも一部の縦方向座標を意味し得る。追加的に又は代替的に、物体の位置は、物体及び/又は物体の少なくとも一部の少なくとも1つの横方向座標を意味し得る。追加的に又は代替的に、物体の位置は、空間における物体の方向付けを示す、物体の少なくとも1つの方向付け情報を意味し得る。
測定ヘッドは:
― 少なくとも1つの転送装置であって、前記転送装置が、物体から測定ヘッドに伝播する少なくとも1つの入射光ビームに対応して少なくとも1つの焦点距離を有する、少なくとも1つの転送装置と;
― 少なくとも2つの光受信ファイバであって、前記光受信ファイバの少なくとも1つ及び/又は前記転送装置は、εr/k≧0.362(m・K)/Wの比εr/kを有し、式中kは熱伝導率であり、εrは比誘電率である、少なくとも2つの光受信ファイバと、
を有している。
「転送システム」とも呼ばれる「転送装置」という用語は、一般に、光ビームの1つ以上のビームパラメータ、光ビームの幅、又は光ビームの方向のうちの1つ以上を変更することによってなど、光ビームを変更するように適合された1つ以上の光学要素を指し得る。転送装置は、光ビームを光受信ファイバに案内するように適合され得る。転送装置は、具体的には:少なくとも1つのレンズ、例えば、少なくとも1つの焦点調節可能レンズ、少なくとも1つの非球面レンズ、少なくとも1つの球面レンズ、少なくとも1つのフレネルレンズからなる群から選択される少なくとも1つのレンズ;少なくとも1つの回折光学要素;少なくとも1つの凹面鏡;少なくとも1つのビーム偏向要素、好ましくは少なくとも1つのミラー;少なくとも1つのビーム分割要素、好ましくはビーム分割キューブ又はビーム分割ミラーのうちの少なくとも1つ;少なくとも1つのマルチレンズシステム、のうちの1つ以上を含み得る。転送装置は、少なくとも1つの勾配指数(GRIN)レンズを備えることができる。GRINレンズは、連続的な屈折勾配、例えば、軸方向及び/又は半径方向及び/又は球状の屈折勾配を有してよい。GRINレンズのf値は、レンズ長に依存し得る。GRINレンズを使用することにより、光学系を小型化、特に非常に薄い光学系を使用することを可能にすることができる。例えば、0.2mmの厚さ又は直径の非常に薄い光学系が可能となり得る。転送装置は、例えばトーラス形状を有する少なくとも1つの環状軸方向レンズを含むことができる。環状軸方向レンズは、平面−凸形状、例えば、軸方向及び/又は半径方向及び/又は球状の曲率を有してよい。
転送装置は、物体から測定ヘッドに伝播する少なくとも1つの入射光ビームに対応する焦点距離を有する。本明細書で使用される場合、転送装置の「焦点距離」という用語は、転送装置に衝突する可能性がある入射平行光線が「フォーカルポイント(focal point)」とも呼ばれる「焦点(focus)」に集束される距離を指す。したがって、焦点距離は、衝突する光ビームを集束させる転送装置の能力の尺度を構成する。したがって、転送装置は、集束レンズの効果を有し得る1つ以上の画像化要素を含むことができる。例として、転送装置は、1つ以上のレンズ、特に1つ以上の屈折レンズ、及び/又は1つ以上の凸面ミラーを有することができる。この例では、焦点距離は、薄い屈折レンズの中心から薄いレンズの主焦点までの距離として定義することができる。凸型又は両凸型の薄レンズなどの、集束する薄い屈折レンズの場合、焦点距離は、正であると考えられ、転送装置としての薄レンズに衝突する平行光が単一の点に集束され得る距離を与えることができる。さらに、転送装置は、少なくとも1つの波長選択要素、例えば少なくとも1つの光フィルタを含むことができる。さらに、転送装置は、例えばセンサ領域の位置で、具体的にはセンサ領域で、電磁放射に所定のビームプロファイルを印加するように設計され得る。転送装置の上記の任意の実施形態は、原則として、個別に、又は任意の所望の組み合わせで実現することができる。
転送装置は、光軸を有してよい。本明細書で使用される場合、「転送装置の光軸」という用語は、一般に、レンズ又はレンズシステムの鏡面対称又は回転対称の軸を指す。特に、測定ヘッドと転送装置は共通の光軸を有する。測定ヘッドの光軸は、測定ヘッドの光学構成の対称線であってよい。測定ヘッドは、少なくとも1つのレンズを有する少なくとも1つの転送システムを備えてよい。転送システムは、一例として、ビーム経路内の転送システムの要素が光軸に対して回転配置されるか、又は対称的にさえ配置されている、少なくとも1つのビーム経路を含むことができる。それでも、以下にさらに詳細に概説するように、ビーム経路内に位置する1つ以上の光学要素は、光軸に対して中心ズレされているか、又は傾斜していてもよい。この場合、しかし、光軸は、ビーム経路内の光学要素の中心を相互接続することによって、例えば、レンズの中心を相互接続することによって、順次定義されてもよく、この文脈では、光センサは光学要素として考慮されない。光軸は、一般にビーム経路を示してよい。そこでは、測定ヘッドは、光ビームがそれに沿って物体から光受信ファイバに進む単一のビーム経路を有してもよいし、複数のビーム経路を有してもよい。一例として、単一のビーム経路が与えられてもよいし、又はビーム経路が2つ以上の部分ビーム経路に分割されてもよい。後者の場合、各部分ビーム経路は、それ自身の光軸を有することができる。光受信ファイバは、1つかつ同一のビーム経路又は部分ビーム経路に配置されてよい。代替的に、しかし、光受信ファイバはまた、異なる部分ビーム経路に配置されてよい。
転送装置は、縦方向座標lが光軸に沿った座標であり、dが光軸からの空間的オフセットである座標系を構成してよい。座標系は、転送装置の光軸がz軸を形成し、z軸からの距離及び極角が追加の座標として使用され得る極座標系であり得る。z軸に平行又は反平行な方向は、縦方向とみなすことができ、z軸に沿った座標は縦方向座標lとみなすことができる。z軸に垂直な任意な方向は、横方向とみなすことができ、極座標及び/又は極角度は横方向座標とみなすことができる。
「光ビーム」という用語は、一般に、特定の方向に放出及び/又は反射される光の量を指すことができる。したがって、光ビームは、光ビームの伝播方向に垂直な方向に所定の広がりを有する光線の束であってよい。好ましくは、光ビームは、例えばビームウェスト、レイリー長、又は、ビーム径及び/又は空間を伝播するビームの広がりを特徴付けるのに適した任意の他のビームパラメータ又はビームパラメータの組み合わせのうちの1つ以上などの、1つ以上のガウスビームパラメータによって特徴づけられ得る、ガウス光ビームの線形結合などの1つ以上のガウス光ビームであり得るかそれを含み得る。本明細書で使用される場合、「光線(ray)」という用語は、一般に、エネルギーの流れの方向を指す光の波面に対して垂直である線を指す。本明細書で使用される場合、「ビーム」という用語は一般に光線の集まりを指す。以下では、「光線」及び「ビーム」という用語は同義語として使用される。本明細書でさらに使用される場合、「光ビーム」という用語は、一般に光の量を指し、具体的には、光ビームが発散角又は広がり角を有する可能性を含めて実質的に同じ方向に進む光の量である。光ビームは空間的広がりを有することができる。具体的には、光ビームは、非ガウスビームプロファイルを有することができる。ビームプロファイルは台形ビームプロファイル;三角形ビームプロファイル;円錐形ビームプロファイル、からなる群から選択されてよい。台形ビームプロファイルは、プラトー領域と少なくとも1つのエッジ領域とを有することができる。本明細書で使用される場合、「ビームプロファイル」という用語は、一般に、光ビームの横方向の強度プロファイルを指す。ビームプロファイルは、特に光ビームの伝播に垂直な少なくとも1つの平面における、光ビームの強度の空間分布であり得る。光ビームは、具体的には、以下でさらに詳細に概説するように、ガウス光ビーム又はガウス光ビームの線形結合であり得る。しかしながら、他の実施形態も可能である。測定ヘッドは、ビームプロファイル、特にビームプロファイルの形状の調整、定義、及び決定の1つ以上のために構成された少なくとも1つの転送装置を有してよい。本明細書で使用される場合、「光」という用語は、一般に、可視スペクトル範囲、紫外スペクトル範囲、及び赤外スペクトル範囲のうちの1つ以上における電磁放射を指す。そこでは、可視スペクトル範囲という用語は、一般に、380nm〜780nmのスペクトル範囲を指す。赤外スペクトル範囲という用語は、一般に、780nm〜1mmの範囲、好ましくは780nm〜3.0マイクロメートルの範囲における電磁放射を指す。紫外スペクトル範囲という用語は、一般に、1nm〜380nmの範囲、好ましくは100nm〜380nmの範囲における電磁放射を指す。好ましくは、本発明内で使用される光は、可視光、すなわち、可視スペクトル範囲の光である。
本明細書で使用される場合、「光ファイバ」という用語は、その通常の意味を有し、具体的には、光ファイバの入口面に衝突する少なくとも1つの光ビームを光ファイバの出口面に導くように構成された少なくとも1つの光学要素を指す。入口面と出口面は、一定の距離だけ互いに離れていてもよく、少なくとも1つの導光構造によって接続されていてもよい。本明細書で使用される場合、「少なくとも部分的に導光する」という用語は、完全な導光を指し、及び、入口面からの吸収及び反射及び/又は導光構造から又は導光構造外への吸収及び反射が可能な構成を指す。具体的には、光受信ファイバの各々は、少なくとも1つの光測定ファイバであってもよく、及び/又はそれを備えていてもよい。本明細書で使用される場合、「光測定ファイバ」という用語は、入射光ビームを少なくとも1つの光センサに提供するように構成された少なくとも1つの光ファイバを有する少なくとも1つの角度依存光学要素を指す。光受信ファイバは、2つの端部を有してよい。光受信ファイバは、物体から発生する少なくとも1つの光ビームを受信するように適合された少なくとも1つの受信端を含んでよい。光受信ファイバは、物体から発生した光ビームが光受信ファイバから離れる少なくとも1つの出口端を含んでよい。受信端はまた、少なくとも1つの受信ファイバの少なくとも1つの入口面としても示され、該入口面は、物体から測定ヘッドに向かって進む光ビームが光受信ファイバに衝突する位置としても示されてもよい。この理論に拘束されることを望まないが、入射角が光受信ファイバの受容角と等しいか、又はそれよりも小さいことを前提として、入射角が出射角と等しくなるように、光受信ファイバによって受信される光ビームの入射角は維持されると考えられる。このように、光ビームに符号化された距離情報は本質的に保存され、下で詳細に説明する結合信号Qを用いて評価されることができる。
光受信ファイバは、反射効果を無視して、光受信ファイバに対して平行に、すなわち0°の角度で入射する光線に対して、透過率が最も高くなるように設計され得る。光受信ファイバは、より高い角度、例えば1°から10°までの角度で、透過率が、平行光線の透過率の約80%まで滑らかに減少し、光受信ファイバの受容角まで一定にこのレベルを維持できるように設計されてよい。本明細書で使用される場合、「受容角」という用語は、光線が光受信ファイバの外に反射されるなど、光受信ファイバ内での全反射が不可能な角度以上の角度を指し得る。光受信ファイバは、受容角で、透過率がゼロに急激に低下するように設計されてよい。大きい入射角を有する光線はカットされ得る。
光受信ファイバは、入口端及び出口端などのそれぞれの光受信ファイバの両端間で、吸収及び/又は反射されない入射光ビームの少なくとも一部を伝送するように、適合されてよい。光受信ファイバは、ある長さを有し、ある距離伝送を可能にするように適合されてよい。光受信ファイバは、シリカ、アルミノケイ酸塩ガラス、ゲルマンケイ酸塩ガラス、フルオロジルコン酸塩、希土類ドープガラス、フッ化物ガラス、カルコゲナイドガラス、サファイア、特に石英ガラスにドープされた変種、リン酸塩ガラス、PMMA、ポリスチレン、ポリ(パーフルオロブテニルビニルエーテル)等のフッ素ポリマー、又は類似物からなる群から選択される少なくとも1つの材料を含んでよい。光受信ファイバは、シングルモードファイバであってもよいし、マルチモードファイバであってもよい。各光受信ファイバは、ステップインデックスファイバ、偏光ファイバ、偏光維持ファイバ、プラスチック光受信ファイバ等のうちの1つ以上であってもよいし、それを含んでいてもよい。
光受信ファイバの各々は、少なくとも1つのファイバクラッドによって囲まれた少なくとも1つのファイバコアを含んでよい。ファイバククラッドは、ファイバコアとしてより低い屈折率を有することができる。ファイバクラッドは、二重又は複数のクラッドであってよい。ファイバクラッドは、いわゆるアウタージャケットを含んでよい。ファイバクラッドは、損傷や湿気から光受信ファイバを保護するように適合された、いわゆるバッファによって被覆されていてよい。バッファは、少なくとも1つのUV硬化ウレタンアクリレート組成物及び/又は少なくとも1つのポリイミド材料を含み得る。一実施形態では、ファイバコアの屈折率は、ファイバクラッド材料の屈折率よりも高くてよく、光受信ファイバは、受容角以下で全内部反射によって入射光ビームを導くように適合されてよい。一実施形態では、光受信ファイバは、フォトニックバンドギャップファイバとも呼ばれる少なくとも1つの中空コアファイバを含むことができる。中空コアファイバは、入射光ビームを実質的にいわゆる中空領域内で導くように適合されてよく、そこでは、光ビームのわずかな部分が、ファイバクラッド材料内への伝播によって失われる。
光受信ファイバは、それぞれの光受信ファイバの端部に1つ以上のファイバコネクタを備えることができる。光受信ファイバは、コアレスエンドキャップなどのエンドキャップを備えることができる。光受信ファイバは、ファイバカプラ、ファイバブラッググレーティング、ファイバ偏光子、ファイバアンプ、ファイバ結合ダイオードレーザ、ファイバコリメータ、ファイバジョイント、ファイバスプライシング、ファイバコネクタ、メカニカルスプライシング、フュージョンスプライシングなどのうちの1つ以上を含み得る。光受信ファイバは、ポリマーコーティングを含み得る。
光受信ファイバは、少なくとも2つ又はそれ以上のファイバを含み得る。光受信ファイバの少なくとも1つは、少なくとも1つの多分岐光ファイバ、特に少なくとも1つの分岐光ファイバであってよい。例えば、分岐光ファイバは、2つのファイバ、具体的には、少なくとも1つの第1ファイバと少なくとも1つの第2ファイバを含み得る。第1ファイバと第2ファイバは、分岐光ファイバの入口端で互いに近接して配置されてよく、分岐光ファイバの出口端で距離を隔てて2つの脚部に分割されてよい。第1ファイバ及び第2ファイバは、同一の特性を有するファイバとして設計されていてもよいし、又は異なるタイプのファイバであってもよい。第1ファイバは、少なくとも1つの第1透過光ビームを生成するように適合されてよく、第2ファイバは、少なくとも1つの第2透過光ビームを生成するように適合されてよい。分岐光ファイバは、入射光ビームが、第1入射角で第1ファイバに衝突し、及び、第1入射角とは異なる第2入射角で第2ファイバへ衝突し、第1透過光ビームと第2透過光ビームとで透過率が異なるように構成されてよい。光受信ファイバの少なくとも1つは、2つ以上のファイバ、例えば3つ、4つ又はそれ以上のファイバを備えてよい。例えば、多分岐型は、複数のファイバを備えることができ、各ファイバは、コア、クラッド、バッファ、ジャケットのうちの少なくとも1つを備えてよく、1つ以上のファイバは、ファイバの一端などで、ファイバが互いに近くに留まることを確実にするために、ポリマーホースなどさらなるジャケットによって部分的に又は全体的に束ねられてよい。全ての光受信ファイバは、同じ開口数を有してよい。全ての光受信ファイバは、物体から測定ヘッドに伝播する光ビームが、転送装置と転送装置の焦点との間で全ての光受信ファイバに衝突するように配置されてよい。光受信ファイバは、物体から測定ヘッドに伝播する光ビームが光受信ファイバに衝突する光軸に沿った位置が、全ての光ファイバについて同一となるように配置されてよい。他の配置もあり得る。
光受信ファイバは、広範囲の環境下での距離測定の安定性を確保するために、特定の機械的特性を有してよい。光受信ファイバの機械的特性は同一であってもよいし、光受信ファイバの機械的特性は異なっていてもよい。この理論に拘束されることを望むことなく、様々で急速に変化する環境条件の中で測定するための光受信ファイバを有する光学系の信頼性は、屈折率と特定のエネルギー輸送特性の関係に依存する。さらに、光受信ファイバを含む光学系の全ての機能が、特に条件の変化の間、安定した方式で維持されるために、特定の機械的パラメータが前提であり得る。したがって、特定の機械的パラメータは、安定した測定自体を確保するための前提条件として機能し得る。少なくとも1つの光受信ファイバ及び/又は転送装置は、εr/k≧0.362(m・K)/Wの比εr/kを有する。好ましくは、少なくとも1つの光受信ファイバ及び/又は転送装置は、εr/k≧0.743(m・K)/Wの比εr/kを有し、好ましくはεr/k≧1.133(m・K)/Wの比εr/kである。少なくとも1つの光受信ファイバ及び/又は転送装置は、0.362(m・K)/W≦εr/k≦1854(m・K)/Wの範囲の比εr/kを有してよく、式中kは熱伝導率、εrは比誘電率である。この理論に拘束されることなく、電熱装置及び/又は電気スパーク装置及び/又は加熱アーク装置等によって放出される電界に関連する、電熱装置及び/又は電気冷却装置に関連する急速な熱サイクル及び/又は高温又は低温の環境において、熱伝導率及び誘電率の商に対する所定の範囲内での光学系の使用することにより、これらの環境において優れた安定性を有する測定ヘッドを得られることが示されている。比誘電率は、誘電率ともして知られている。好ましくは、比εr/kは0.743(m・K)/W≦εr/k≦194(m・K)/Wの範囲である。より好ましくは、比εr/kは1.133(m・K)/W≦εr/k≦88.7(m・K)/Wの範囲である。光受信ファイバの少なくとも1つ及び/又は転送装置は、1.02≦εr≦18.5、好ましくは1.02≦εr≦14.5、より好ましくは1.02≦εr≦8.7の範囲の比誘電率を有していてよく、ここで比誘電率は20℃及び1kHzで測定されている。光受信ファイバ及び/又は転送装置は、k≦24(m・K)/W、好ましくはk≦17(m・K)/W、より好ましくはk≦14(m・K)/Wの熱伝導率を有することができる。光受信ファイバ及び/又は転送装置は、k≧0.003(m・K)/W)、好ましくはk≦0.007(m・K)/W、より好ましくはk≦0.014(m・K)/Wの熱伝導率を有することができる。熱伝導率は、0℃、及び1%未満の相対湿度で測定され得る。
転送装置は、9.05≦νe/nD≦77.3の範囲内の比νe/nDを有してよく、νeはアッベ数、nDは屈折率である。アッベ数νeは以下の数式1で与えられる。
ここで、niは異なる波長に対する屈折率であり、nCは656nmの場合の屈折率、nDは589nmの場合の屈折率、及びnFは、486nmの場合の屈折率であり、室温で測定されたものであり、たとえばhttps://en.wikipedia.org/wiki/Abbe_numberを参照されたい。好ましくは、比νe/nDは、13.9≦νe/nD≦44.7の範囲であり、より好ましくは、15.8≦νe/nD≦40.1の範囲である。この理論に拘束されることを望まないが、屈折率は常に製造公差に依存する。さらに、屈折率は温度依存である。さらに、光源の波長は、温度変化に関して常に一定の許容誤差がある。急速に変化する温度や非常に高い温度、又は制御されていない環境にも拘わらず、安定した距離測定を保証するために、屈折率に対するアッベ数の商は、必要な安定範囲を保証する値に制限される場合がある。
上述したように、光受信ファイバの各々は、少なくとも1つのクラッドと少なくとも1つのコア含み得る。積αΔnは、視覚及び近赤外波長範囲の少なくとも1つの波長、好ましくは656nm、589nm、又は486nmから選択される少なくとも1つの波長において、αΔn≦110dB/kmであってもよく、式中αは減衰係数であり、ΔnはΔn=(n1 2−n2 2)/(2n1 2)の屈折率コントラストであり、n1は最大コア屈折率であり、n2はクラッド屈折率である。好ましくは、積αΔnはαΔn≦23dB/km、好ましくはαΔn≦11.26dB/kmである。積αΔnは、視覚及び近赤外波長範囲の少なくとも1つの波長、好ましくは656nm、589nm、又は486nmから選択される少なくとも1つの波長において、0.0004dB/km≦αΔn≦110dB/kmの範囲であってもよい。好ましくは、積αΔnは0.002dB/km≦αΔn≦23dB/kmの範囲であり、より好ましくは0.02dB/km≦αΔn≦11.26dB/kmの範囲である。屈折率コントラストΔnは、0.0015≦Δn≦0.285の範囲、好ましくは0.002≦Δn≦0.2750の範囲、より好ましくは0.003≦Δn≦0.25の範囲であり得る。光受信ファイバの減衰係数は、0.2dB/km≦α≦420dB/km、より好ましくは0.25dB/km≦α≦320dB/kmの範囲であり得る。転送装置は、開口面積D1を有してよく、光受信ファイバの少なくとも1つは、断面積D2を有するファイバコアであってよく、比D1/D2は、0.54≦D1/D2≦5087の範囲、好ましくは1.27≦D1/D2≦413の範囲、より好ましくは2.17≦D1/D2≦59.2の範囲にある。この理論に拘束されることを望まないが、光学系の機械的境界を制限することは、光学系に関する測定安定性を大幅に向上させる結果となり得る。光受信ファイバの少なくとも1つのコアの直径dcoreは、2.5μm≦dcore≦10000μm、好ましくは7μm≦dcore≦3000μm、より好ましくは10μm≦dcore≦500μmの範囲であってよい。この理論に拘束されることを望まないが、光受信ファイバの屈折率コントラストは、製造公差及び/又は製造品質に関して敏感である一方で、温度変化及び/又は高温に関しても敏感であることが示されている。さらに、屈折率コントラストとは関係なく、主に材料特性の影響を受ける減衰係数は、製造品質、温度変化、高運転温度などに対して同様の感度を示す。さらに、環境パラメータの強い独立性が要求される場合、これらの量の関係する感度は、測定ヘッドの適切な機能を保証するために、ある範囲に制限される必要がある。
光受信ファイバ及び/又は転送装置は、例えば超音波試験を使用することにより、室温で測定された、ヤング率(弾性率とも呼ばれる)が188GPa以下であってよい。好ましくは、光受信ファイバ及び/又は転送装置は、167GPa以下、より好ましくは0.0001GPa〜97GPaの範囲のヤング率を有することができる。光受信ファイバ及び/又は転送装置は、0.0001GPa以上、好ましくは0.007GPa以上、より好ましくは0.053GPa以上のヤング率を有することができる。
上述したように、光受信ファイバの各々は、少なくとも1つの入口面を有してよい。それぞれの入口面の幾何学的中心は、転送装置の光軸に対して垂直に整合されてよい。本明細書で使用される場合、領域の「幾何学的中心」という用語は、一般に、該領域の重心を指してよい。例として、領域の内側又は外側の任意の点が選択され、この任意の点を領域の各点と相互接続するベクトルにかけて積分が形成される場合、積分は、任意の点の位置の関数である。任意点が領域の幾何学的中心に位置する場合、積分の絶対値の積分は最小化される。したがって、言い換えれば、幾何学的中心は、その領域の全ての点からの全体の距離又は和の距離が最小となる領域の内側又は外側の点であってよい。
光受信ファイバの少なくとも1つは、物体に向かって配向された入口面を有してよい。本明細書で使用される場合、「物体に向かって配向される」という用語は、一般に、入口面の対応する表面又は開口部が物体から完全に又は部分的に見える状態を指す。具体的には、物体の少なくとも1つの点とそれぞれの入口面の少なくとも1つの点との間の少なくとも1つの相互接続線は、入口面の表面要素と0°と異なる角度、例えば、20°から90°の範囲の角度、好ましくは80°から90°の範囲の角度、例えば90°を形成することができる。したがって、物体が光軸上又は光軸の近くにある場合、物体から測定ヘッドに向かって伝播する光ビームは、実質的に光軸に平行であり得る。本明細書で使用される場合、「実質的に垂直」という用語は、例えば±20°以下、好ましくは±10°以下、より好ましくは±5°以下の許容誤差を有する垂直な向きの状態を指す。同様に、「実質的に平行」という用語は、例えば±20°以下、好ましくは±10°以下、より好ましくは±5°以下の許容誤差を有する平行な向きの状態を指す。追加的又は代替的に、入口面の少なくとも1つは、物体に向かう方向付けとは異なる方向付けをされてよい。例えば、入口面の少なくとも1つは、例えば、入口面の少なくとも1つは、光軸に対して及び物体に対して垂直又は任意の角度の下に配向されてよい。
転送装置は、光ビームの伝播方向を調整及び/又は変更するように適合されてよい。転送装置は、特に、少なくとも1つのGRINレンズ及び/又は少なくとも1つの回折光学要素(DOE)であってもよいし、それらを含んでいてもよい。転送装置は、物体から測定ヘッドに伝播する光ビームに影響を与えるように、例えば、転向させるように適合されてよい。特に、転送装置は、光ビームの伝播方向を調整するように適合されてよい。転送装置は、転送装置の光軸に関して伝播の角度を調整及び/又は生成するように適合され得る。伝播角度は、転送装置の光軸と、物体から測定ヘッドへ伝播する光ビームの伝播方向との間の角度であってよい。転送装置を使用しない場合、光ビームの伝播角度は、主に、光ビームが生成される物体の特性、例えば物体の表面特性及び/又は材料特性に依存し得る。転送装置は、物体の表面特性に依存しないような伝播角度を調整及び/又は生成するように適合され得る。転送装置は、光ビームの伝播方向の角度依存性を増強及び/又は増幅するように適合され得る。理論に拘束されることを望まないが、物体によって生成された光ビームは、物体から測定ヘッドまで伝播し、0°から、すなわち光軸から、物体上の散乱源から転送装置の端部までで定義される任意の角度Xまで、の角度範囲で転送装置に衝突し得る。転送装置は集光特性を含むことができるため、転送装置を通過した後の角度範囲は、元の角度範囲とは著しく異なる可能性がある。例えば、光軸に平行に衝突する光ビームは、フォーカルポイント又は焦点に集束され得る。転送装置の集光特性に応じて、転送装置に衝突する前と、転送装置を通過した後の角度依存性が反転する場合がある。転送装置は、遠方場、すなわち、物体が光ビームが光軸に実質的に平行に伝播する遠い距離に配置されている場合の角度依存性を増幅するように適合され得る。一般的に、転送装置を使用しない場合、角度依存性は、近場領域で最大になり得る。近場では、信号は一般に遠方場信号に比べて強くなり得る。したがって、遠方場での角度依存性を増幅する転送装置による近場でのより小さい角度依存性は、近場における一般的に良好な信号対ノイズ比により、及び/又は非ゼロベースラインによる距離依存性スポット移動などの追加の近場特性を使用することにより、少なくとも部分的に補償され得る。追加的又は代替的に、光ビームの伝播方向を調整及び/又は変更するために、光受信ファイバの少なくとも1つは、形状化及び/又は構造化された入口面及び/又は出口面を有する構造化ファイバであってよい。構造化ファイバを使用することは、入射光ビームの角度依存性をさらに増大させることを可能にすることができる。
光受信ファイバは、物体から転送装置後方の測定ヘッドに伝播する入射光ビームの伝播方向に配置されてよい。光受信ファイバ及び転送装置は、物体から測定ヘッドへ伝播する光ビームが光受信ファイバに衝突する前に転送装置を通過するように配置されてよい。GRINレンズなどの転送装置と光受信ファイバとは一体に構成されてよい。光受信ファイバは、屈折率の差がより大きい界面での反射を低減するために、ポリマーや接着剤などによって転送装置に取り付けられることができる。あるいは、転送装置と光受信ファイバは、光軸方向に、あるいは光軸と平行な方向に離間するように、空間的に分離されて配置されてよい。転送装置及び/又は光受信ファイバは、光軸に垂直な方向に変位して配置されてよい。光受信ファイバは、物体から測定ヘッドに伝播する光ビームが、転送装置と転送装置の焦点との間の光受信ファイバに衝突するように配置されてよい。例えば、転送装置と、物体から測定ヘッドに伝播する光ビームが光受信ファイバに衝突する位置との間の光軸と平行な方向の距離は、焦点距離の少なくとも20%、より好ましくは焦点距離の少なくとも50%、最も好ましくは焦点距離の少なくとも80%であり得る。例えば、物体から測定ヘッドに伝播する光ビームを受信する光受信ファイバの少なくとも1つの入口面と、転送装置との間の光軸と平行な方向の距離は、焦点距離の少なくとも20%、より好ましくは焦点距離の少なくとも50%、最も好ましくは焦点距離の少なくとも80%であり得る。
光受信ファイバのそれぞれは、物体から測定ヘッドに向かって伝播し、それぞれの光受信ファイバに衝突する入射光ビームの入射角に依存する少なくとも1つのビームプロファイルを有する少なくとも1つの光ビームを生成するように構成されてよい。特に、光受信ファイバのそれぞれは、入射光ビームのビームプロファイルに影響を与え、及び/又は変更し、及び/又は調整するように適合されてよい。例えば、光学要素のそれぞれは、角度依存透過特性、角度依存反射特性、又は角度依存吸収特性のうちの1つ以上を有してよい。それぞれの光受信ファイバを通過した光ビームは、少なくとも1つの透過光ビーム及び/又は少なくとも1つの反射光ビームを有してよい。入口面のなどの光受信ファイバの光軸に対して入射角を測定することができる。
入口面に衝突する電磁波は、光受信ファイバの特性に応じて、部分的に吸収及び/又は反射及び/又は透過され得る。「吸収」という用語は、光受信ファイバによる入射光ビームの出力及び/又は強度の減少を指す。例えば、入射光ビームの出力及び/又は強度は、光受信ファイバによって熱又は別のタイプのエネルギーに変換され得る。本明細書で使用される場合、「透過」という用語は、光受信ファイバの外側で光軸に対して90°以上の角度を有する半空間で測定可能な電磁波の一部を指す。例えば、透過は、入口面に衝突し、光受信ファイバを通過し、出口端で光受信ファイバから離れる電磁波の残りの部分であり得る。「反射」という用語は、光受信ファイバの外側で光軸に対して90°未満の角度を有する半空間において測定可能な電磁波の一部分を指す。例えば、反射は、光受信ファイバとの相互作用による入射光ビームの波面の方向の変化であってよい。光受信ファイバに衝突する電磁波の総出力は、光受信ファイバによって、少なくとも3つの成分、すなわち、吸収成分、反射成分及び透過成分に分配され得る。透過率は、光受信ファイバに衝突する電磁波の総出力で正規化された透過成分の出力として定義することができる。吸収率は、光受信ファイバに衝突する電磁波の総出力で正規化された吸収成分の出力として定義することができる。反射率は、光受信ファイバに衝突する電磁波の総出力で正規化された反射成分の出力として定義することができる。少なくとも1つの転送装置を使用することにより、縦方向座標の測定の堅牢性をさらに高めることができる。転送装置は、例えば、少なくとも1つのコリメートレンズを含んでよい。光受信ファイバは、より小さな角度で入射する光線に比べて、より大きな角度で入射する光線を弱めるように設計され得る。例えば、透過率は、光軸に平行な光線、すなわち0°で最も高く、より高い角度では減少してもよい。特に、少なくとも1つのカットオフ角度で、透過率は急にゼロに低下し得る。したがって、大きい入射角を有する光線は、カットオフされ得る。
測定ヘッドは、複数の光受信ファイバ、例えば、複数の単一光受信ファイバ又は複数の多分岐光受信ファイバを含むことができる。例えば、光受信ファイバは、光受信ファイバの束に配置されてよい。例えば、測定ヘッドは、複数の単一光ファイバ、例えば、同一の特性を有する光受信ファイバを含むことができる。光ファイバ、すなわち単一光ファイバ又は多分岐光ファイバは、入射光ビームが、光ファイバにそれぞれに異なる入射角で衝突し、光ファイバのそれぞれについて透過度が異なるように構成されてよい。
測定ヘッドは、少なくとも1つのスペーサ装置を含んでよい。スペーサ装置は、少なくとも1つの転送装置と光ファイバの少なくとも1つとを接続するように構成されてよい。スペーサ装置は、転送装置を光ファイバの少なくとも1つに取り付けるように構成されてよい。測定ヘッドが複数の転送装置及び/又は光ファイバを有する場合、スペーサ装置は、転送装置の少なくとも1つと光ファイバの少なくとも1つとを接続するように構成されてよい。光ファイバの光路は、内部反射を回避するために、完全又は部分的に透過性のない機械的壁又はクラッドなどの機械的手段によって完全又は部分的に光学的に分離され得る。機械的手段による光学的分離は、スペーサ装置の一部であってもよい。スペーサ装置は、中実容積Vsと、ハル容積とも呼ばれる中空容積Vhを含んでよい。中実容積は、スペーサ装置が構成する固体材料の容積によって定義することができる。ハル容積は、凸包容積であってよい。スペーサ装置の凸包容積は、スペーサ装置の中実容積のうち、最小凸包容積として定義されることができる。スペーサ装置の中空容積は、スペーサ装置の凸包容積からスペーサ装置の中実容積を差し引いた容積として定義することができる。例えば、中空容積は、固体材料の内部エッジによって定義され得る。中実容積と中空容積の比Vs/Vhは、0.013≦Vs/Vh≦547の範囲、好ましくは0.047≦Vs/Vh≦87.6の範囲、より好ましくは0.171≦Vs/Vh≦26.2の範囲にある。
入射光ビームは、物体から測定ヘッドに向かって伝播してよい。以下にさらに詳細に概説するように、入射光ビームは、物体、及び/又は物体に一体化された又は取り付けられた少なくとも1つの光ビームを放出する照射源によってなど、物体から発生してもよく、又は別の照射源から、例えば物体を直接又は間接的に照射し、光ビームが物体によって反射又は散乱され、それによって、少なくとも部分的に測定ヘッドに向けられる照射源から、発生してもよい。照射源は、一例として、外部照射源、検出器に一体化された照射源、又は、物体に取り付けられた、物体に一体化された、又は物体によって保持された、のうちの1つ以上であるビーコン装置に一体化された照射源、のうちの1つ以上であってもよいし、又はそれらを含んでいてもよい。したがって、測定ヘッドは、能動的及び/又は受動的な照射シナリオで使用されてよい。
測定ヘッドは、物体を照射するための照射源をさらに含んでよい。照射源は、例えば光ビームを反射する物体に光ビームを向けることによって、物体を照射するように構成されてよい。照射源は、物体を照射するための照射光ビームを生成するように構成され得る。したがって、照射源は、少なくとも1つの光源を含むことができる。具体的には、照射源は、少なくとも1つのレーザ及び/又はレーザ源を含むことができる。光源は、少なくとも1つのマルチビーム光源であってもよいし、それを含んでもよい。例えば、光源は、少なくとも1つのレーザ源と、1つ以上の回折光学要素(DOE)を含んでよい。照射源は、少なくとも1つの角度依存光学要素を介して物体を照射するように適合されていてもよい。半導体レーザなどの様々なタイプのレーザを採用することができる。追加的又は代替的に、LED及び/又は電球などの非レーザ光源を使用することができる。照射源は、点群を生成及び/又は投影するように適合されてもよく、例えば、照射源は、少なくとも1つのデジタル光処理プロジェクタ、少なくとも1つのLCoSプロジェクタ、少なくとも1つの空間光変調器うちの1つ以上;少なくとも1つの回折光学要素;少なくとも1つの発光ダイオードのアレイ;少なくとも1つのレーザ光源のアレイのうちの1つ以上を含んでよい。照射源は、人工照射源、特に、少なくとも1つのレーザ源及び/又は少なくとも1つの白熱灯及び/又は少なくとも1つの半導体光源、例えば、少なくとも1つの発光ダイオード、特に、有機及び/又は無機発光ダイオードを含み得る。一例として、照射源が放出する光は、300〜1000nm、特に500〜1000nmの波長を有し得る。追加的又は代替的に、赤外スペクト領域の光、例えば780nm〜3.0μmの範囲の光を使用することができる。具体的には、シリコンフォトダイオードが適用可能な、具体的には700nm〜1000nmの範囲の近赤外領域部分の光を使用することができる。それらの一般的に定義されたビームプロファイル及び取り扱い性の他の特性のため、照射源としての少なくとも1つのレーザ源の使用が特に好ましい。照射源は、測定ヘッドのスペーサ装置に組み込まれていてもよい。
照射源は、照射光ビームが測定ヘッドの光軸に沿って検出器から物体に向かって伝播するように、構成されてよい。この目的のために、測定ヘッドは、照射光ビームを光軸上に偏向させるために、少なくとも1つの反射要素、好ましくは少なくとも1つのプリズムを含み得る。
照射源は、少なくとも1つの光照射ファイバを備えてよい。光照射ファイバは、少なくとも1つの入口端を有することができる。少なくとも1つの光源は、入口端に配置され得る。照射源は、光源によって生成された少なくとも1つの光ビームを光照射ファイバに連結するように構成された少なくとも1つのカップリング要素を含んでよい。光照射ファイバは、少なくとも1つの出口端をさらに備えることができ、該出口端は、光照射ファイバを通過した光ビームを放出するように構成されている。照射源は、少なくとも1つのさらなる転送装置を備えることができる。さらなる転送装置は、転送装置と一体に設計することができ、例えば、転送装置が、さらなる転送装置として使用されてよい。
さらに、照射源は、変調された光又は変調されていない光を放出するように構成され得る。複数の照射源が使用される場合、異なる照射源は、後に光ビームを区別するために使用され得る異なる変調周波数を有してよい。
照射光ビームは、一般に、測定ヘッド、具体的には転送装置の光軸に対して平行であってもよいし、光軸に対して傾斜していてもよく、例えば、光軸との角度を含んでいてもよい。一例として、レーザ光ビームなどの照射光ビームと光軸の角度は、10°未満、好ましくは5°未満、さらに好ましくは2°未満の角度を含んでよい。しかしながら、他の実施形態が可能である。さらに、照射光ビームは、光軸上にあってもよいし、光軸からずれていてもよい。一例として、照射光ビームは、光軸に対して10mm未満、好ましくは、光軸に対して5mm未満、さらに、光軸に対して1mm未満の距離を有して光軸に平行であり得るか、又は光軸と一致さえすることができる。
測定ヘッドは、物体から測定ヘッドへ進行する光ビームを光ファイバに結合するように適合されたさらなる結合要素、特にさらなるインカップリング要素を含んでよい。さらなる結合要素は、物体から検出器へと進行する光ビームの伝播方向に、光ファイバの前方に配置されてよい。さらなる結合要素は、少なくとも1つの転送装置であり得るか、又はそれを含み得る。
測定ヘッドは、1つの照射源又は複数の同一の照射源及び/又は複数の異なる照射源を含むことができる。例えば、複数の照射源は、色又は変調周波数などのような異なる特性を有する光を発生する少なくとも2つの照射源を含むことができる。
照射源は、1.5・10−7mm2・sr≦G≦314mm2・srの範囲、好ましくは、1・10−5mm2・sr≦G≦22mm2・srの範囲、より好ましくは、3・10−4mm2・sr≦G≦3.3mm2・srの範囲の幾何学的広がりGを有することができる。照射源の幾何学的広がりGは、
G=A・Ω・n2
によって定義されることができ、式中、Aは、活性放射面、電球、光学的開口、又はA=AOF=π・r2 OFを有するファイバコアの面積であり得る表面面積であり、Ωは、光によって規定される投影立体角であり、nは媒体の屈折率である。半開口角θを有する回転対称光学系の場合、幾何学的広がりは下式によって与えられる。
G=π・A・sin2(θ)n2
光ファイバの場合、発散角はθmax=arcsin(NA/n)で得られ、式中、NAは、光ファイバの最大開口数である。
半開口角θ及び/又は発散角θmaxは小さくてもよい。特に、半開口角θは、0.01°≦θ≦42°の範囲;好ましくは0.1°≦θ≦21°の範囲;より好ましくは、0.15°≦θ≦13°の範囲にあってよく、及び/又は、発散角θmaxが0.01°≦θmax≦42°の範囲;好ましくは0.1°≦θmax≦21°の範囲;より好ましくは0.15°≦θmax≦13°の範囲にあってよい。面積Aは小さくてよい。特に、面積Aは10mm2より小さく、好ましくは3mm2より小さく、より好ましくは1mm2より小さくてよい。
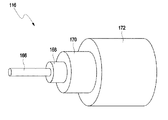
測定ヘッドは、小さいベースラインを含んでよい。特に、ベースラインは、検出器の、少なくとも1つの照射チャネルと少なくとも1つの受信器チャネルとの間の距離であり得る。具体的には、少なくとも1つの照射チャネルと少なくとも1つの受信器チャネルとの間の距離は、例えばxy平面内で、可能な限り小さくてよい。本明細書で使用される場合、「照射チャネル」という用語は、少なくとも1つの物体を照射するための少なくとも1つの照射光ビームを生成するように適合された少なくとも1つの光照射ファイバなどの少なくとも1つの照射源を含む少なくとも1つの光チャネルを指す。照射チャネルは、少なくとも1つの照射源及び少なくとも1つのレンズ要素などの少なくとも1つの送信器光学系を含み得る。本明細書で使用される場合、「受信器チャネル」という用語は、物体から測定ヘッドに伝播する照射光ビームを受信するように適合された光受信ファイバの少なくとも1つを含む少なくとも1つの光チャネルを指す。受信器チャネルは、少なくとも1つの転送装置などの少なくとも1つの受信器光学系を含み得る。ベースライン、すなわち照射チャネルと受信器チャネルとの間の距離は、最小距離であり得る。最小距離は、送信器光学系及び受信器光学系の構成要素のサイズにのみ依存してよい。最小距離はゼロであってもよい。特に、照射源と光受信ファイバの入口面との間の、測定ヘッドの光軸に垂直な距離は、小さくてよい。各光受信ファイバは、少なくとも1つのファイバクラッドと少なくとも1つのコアを含む。比d1/BLは、0.0011≦d1/BL≦513の範囲であってよく、式中、d1はコアの直径であり、BLはベースラインである。好ましくは、比d1/BLは、0.0129≦d1/BL≦28の範囲、より好ましくは、0.185≦d1/BL≦7.1の範囲にある。ベールラインは、0より大きい広がりを有してよい。ベースラインは、10μm≦BL≦127000μmの範囲、好ましくは100μm≦BL≦76200μmの範囲、より好ましくは500μm≦BL≦25400μmの範囲にある。本明細書で使用される場合、ベーシスライン(basis line)とも称される「ベースライン(baseline)」という用語は、少なくとも1つの送信器光学系と少なくとも1つの受信器光学系との間の、例えばxy平面での距離をさらに指す。例えば、ベースラインは、光軸と照射源との間の距離、特に、光軸と照射光ビームのz成分との間の距離であり得る。測定ヘッドは、追加の光学要素、例えば、少なくとも1つのミラーを有してよく、これは、照射源までの距離をさらに増強し得る。例えば、ベースラインは、送信器レンズと受信器レンズとの間の距離であってよい。送信器レンズは、照射光ビームの伝播方向において、光照射ファイバの後方に配置されてよい。受信器レンズは、物体から測定ファイバに伝播する光ビームの伝播方向において、測定ファイバとも称される光受信ファイバの前方に配置されてよい。転送装置は、受信器レンズを含み得る。具体的には、「ベースライン」という用語は、物体から測定ヘッドに伝播する光ビームが光受信ファイバ、特に少なくとも1つの光受信ファイバの少なくとも1つの入口面又は端部に衝突する位置と、照射源及び/又は少なくとも1つの光照射ファイバの少なくとも1つの出口面又は端部との間の距離を意味する。本明細書で使用される場合、「光照射ファイバの入口面又は端部」という用語は、光源によって生成された光ビームを受信するように適合された光照射ファイバの少なくとも1つの端部を指す。用語「光照射ファイバの出口面又は端部」とは、光照射ファイバを通って伝播した光ビームが光照射ファイバを離れる光照射ファイバの少なくとも1つの端部を指す。本明細書で使用される場合、用語「光受信ファイバの入口面又は端部」とは、物体から測定ヘッドに伝播する光ビームを受信するように適合された光受信ファイバの少なくとも1つの端部を指す。「光受信ファイバの出口面」という用語は、光受信ファイバを通って伝播した光ビームが光受信ファイバを離れるように適合された光受信ファイバの少なくとも1つの端部を指す。光受信ファイバは、第1光センサに光を提供する第1光受信ファイバと、第2光センサに光を提供する第2光受信ファイバの2つの光受信ファイバを有してよい。各光受信ファイバは、出口端と入口端とを有してよい。例えば、光受信ファイバは、それぞれが少なくとも1つの入口面を有する少なくとも2つの光受信ファイバを有してよく、ここで、該入口面は、互いに同心状に、又は互いの上に、又は互いに平行に、又は横並びに配置されてよい。
照射源は、少なくとも1つの照射光ビームを生成するように適合されてよく、ここで、光照射ファイバは、屈折率の差がより大きい界面での反射を低減するために、ポリマー又は接着剤などによって、さらなる転送装置に取り付けられてよい。例えば、測定ヘッドは、さらなる光学要素を有しないコンパクトな装置であってよく、ここで、照射源は、可能な限り転送装置の端に近い位置に配置されてよい。したがって、ベースラインは、転送装置の直径、特にレンズの直径及びレンズ及び光源のハウジングの直径の半分に近くてよい。例えば、測定ヘッドは、さらにコンパクトな装置であってよく、ここで、ミラー、特に小型のミラーは、転送装置の前、特に、照射ビームをビーム経路に結合するために、中央、例えば幾何学的中心、又は転送装置の中心近くに配置されてもよい。したがって、ベースラインは、転送装置の直径の半分以下であってもよい。照射源は、ベースラインが可能な限り小さくなるように配置されてよい。照射光ビームの伝播方向が光軸と実質的に平行であるように、及び照射源及び/又は照射ファイバの出口面及び光軸が小さなベースラインによって分離されるように、照射源及び/又は照射ファイバの出口面を配置することにより、非常にコンパクトな装置が可能となる。例えば、転送装置の中心から照射源及び/又は照射ファイバの出口面までの距離、特に転送装置の中心から照射源及び/又は照射ファイバの出口面までの接続線に沿った距離は、好ましくは転送装置の中心から転送装置の端部までの距離の2.5倍以下、より好ましくは転送装置の中心から端部までの距離の1.5倍以下、最も好ましくは転送装置の中心から端部までの距離の1倍以下である。転送装置は任意の形状を有してよく、特に非円形の形状が可能である。小さな距離では、照射源の開口部は小さくてよく、ベースラインは小さくてよい。大きな距離では、照射源の開口部は大きくてよく、ベースラインは小さくてよい。これは三角測量法、そこでは、大きな距離では大きなベースラインが必要になるのとは対照的である。さらに、三角測量法に基づくシステムは、ベースラインの必要な空間的範囲のために、検出器システムから例えば20cmのような、ゼロよりも著しく大きい最小検出範囲を有する。このような大きなベースラインは、物体から散乱された照射光が、転送装置の後方にある光センサの感光エリアに到達しないことを生じる可能性がある。さらに、三角測量法に基づくシステムでは、小さなベースラインを使用することは、最小検出範囲を減少させるが、同時に最大検出範囲を減少させる。さらに、三角測量法に基づくシステムは、複数の感光エリアとセンサ信号、例えば少なくとも1つの検出器列のセンサ信号を必要とする。本発明によれば、縦方向座標zの決定は、減少された数のセンサ信号、特に20個以下、好ましくは10個以下、より好ましくは5個以下のセンサ信号で可能である。照射源及び光受信ファイバは、以下に詳細に説明するように、物体から転送装置の後方にある測定ヘッドに進行する光ビームの伝播方向に配置されてよい。照射ファイバの出口面などの照射源と、光受信ファイバの出口面の間の測定ヘッドの光軸に垂直な距離は、転送装置の半径よりも小さくてよい。
測定ヘッドは、関心領域を走査するために測定ヘッドを移動させるように構成された少なくとも1つのアクチュエータを含むことができる。本明細書で使用される場合、「移動」という用語は、測定ヘッドを駆動すること、及び/又は測定ヘッドを振動させることを意味する。本明細書で使用される場合、「アクチュエータ」という用語は、測定ヘッドを移動させる力を発生するように適合された任意の装置を指す。具体的には、アクチュエータは、光受信ファイバに取り付けられ、及び/又は結合され、及び/又は接続されることができ、光受信ファイバを移動させる力、特に振動させる力を発生するように適合されてよい。アクチュエータは、光照射ファイバに取り付けられ、及び/又は結合され、及び/又は接続されることができ、光照射ファイバを移動させる力を発生するように適合されてよい。アクチュエータは、光受信ファイバ及び/又は光照射ファイバの固有共振周波数の高調波に対応する力を発生するように適合されてよい。アクチュエータは、少なくとも1つの電気機械アクチュエータ及び/又は少なくとも1つの圧電アクチュエータを含むことができる。圧電アクチュエータは、少なくとも1つの圧電セラミックアクチュエータ;少なくとも1つの圧電アクチュエータからなる群から選択される少なくとも1つのアクチュエータを含むことができる。アクチュエータは、測定ヘッド、具体的には光照射ファイバ及び/又は光受信ファイバを振動させるように構成されてよい。アクチュエータは、測定ヘッドを線形走査及び/又はラジアル走査及び/又はスパイラル走査で移動させるように適合されてよい。例えば、アクチュエータは、測定ヘッドが上方及び下方に移動するように、測定ヘッドに力を発生させるように適合されてよい。例えば、アクチュエータは、測定ヘッドが所定の半径軌道上を移動するように、測定ヘッドに力を発生するように構成されてよい。半径は調整可能であり得る。例えば、アクチュエータは、測定ヘッドが交互に減少又は増加する半径でスパイラル状に移動するような力を発生させるように適合されてよい。
本発明のさらなる態様において、少なくとも1つの物体の位置を決定するためのキットが開示されている。キットは、上に開示された実施形態による、及び/又は以下にさらに詳細に開示される1つ以上の実施形態による、少なくとも1つの測定ヘッドを含む。該キットは、
− 少なくとも2つの光センサであって、各光センサは、測定ヘッドの光受信ファイバの少なくとも1つを通過した光ビームによる各感光エリアの照射に応答して、少なくとも1つのセンサ信号を生成するように設計されている、少なくとも2つの光センサと;
− センサ信号からの結合信号Qを評価することにより、物体の少なくとも1つの縦方向座標zを決定するように構成されている、少なくとも1つの評価装置と、
を含む少なくとも1つの検出器をさらに含む。
本明細書で使用される場合、「光センサ」は、一般に、光ビームの検知のための、例えば少なくとも1つの光ビームによって生成される照射及び/又は光スポットの検知のための感光装置を指す。本明細書でさらに使用される場合、「感光エリア」は、一般に、少なくとも1つの光ビームによって外部から照射され、該照射に応答して少なくとも1つのセンサ信号を生成する、光センサのエリアを指す。感光エリアは、具体的には、それぞれの光センサの表面に位置し得る。しかしながら、他の実施形態も可能である。本明細書で使用される場合、「それぞれが少なくとも1つの感光エリアを有する少なくとも2つの光センサ」という用語は、それぞれが1つの感光エリアを有する2つの単一の光センサを備える構成と、少なくとも2つの感光エリアを有する1つの結合された光センサを備える構成とを指す。したがって、「光センサ」という用語は、さらに、1つの出力信号を生成するように構成された感光装置を指し、本明細書では、2つ以上の出力信号を生成するように構成された感光装置、例えば少なくとも1つのCCD及び/又はCMOS装置を、2つ以上の光センサと呼ぶ。以下でさらに詳細に概説されるように、各光センサは、正確に1つの感光エリアがそれぞれの光センサ内に存在するように、例えば、照射され得る正確に1つの感光エリアを提供することによって、該感光エリアの照射に応答して光センサ全体について正確に1つの均一なセンサ信号が生成されるように、具現化されてもよい。したがって、各光センサは、単一エリア光センサであってよい。単一エリア光センサの使用は、しかしながら、検出器の構成を特に簡単かつ効率的にする。したがって、一例として、それぞれが正確に1つの感応エリアを有する市販の光センサ、例えば、市販のシリコンフォトダイオードなどが、構成において使用されてもよい。しかしながら、他の実施形態も可能である。したがって、一例として、本発明の文脈において2つ、3つ、4つ、又は4つ以上の光センサとみなされる、2つ、3つ、4つ、又は4つ以上の感光エリアを含む光学装置が使用されてもよい。一例として、光学装置は、感光エリアのマトリックスを含むことができる。したがって、一例として、光センサは、ピクセル化光学装置の一部であってもよく、又はそれを構成していてもよい。一例として、光センサは、ピクセルのマトリックスを有し、各ピクセルが感光エリアを形成する少なくとも1つのCCD及び/又はCMOS装置の一部であってもよく、又はそれを構成してもよい。
光受信ファイバのそれぞれは、光ビームが感光エリアに衝突するように、少なくとも1つの光ビームを放出するように構成されてよい。例えば、感光エリアの少なくとも1つが光軸に対して任意の角度で配向されている場合、光受信ファイバは、光ビームを感光エリアに導くように適合されてよい。
本明細書でさらに使用される場合、「センサ信号」は、一般に、光ビームによる照射に応答して光センサによって生成される信号を指す。具体的には、センサ信号は、少なくとも1つのアナログ電気信号及び/又は少なくとも1つのデジタル電気信号などの少なくとも1つの電気信号であり得るか、又はそれらを含み得る。より具体的には、センサ信号は、少なくとも1つの電圧信号及び/又は少なくとも1つの電流信号であり得るか、又はそれらを含み得る。より具体的には、センサ信号は、少なくとも1つの光電流を含み得る。さらに、未処理のセンサ信号を使用してもよく、又は検出器、光センサ、又はその他の要素が、フィルタリングなどによる前処理など、センサ信号を処理又は前処理するように適合され得、それによってセンサ信号としても使用できる二次センサ信号を生成することができる。
光センサは、紫外、可視、又は赤外スペクトル範囲の1つ以上で感度を有してよい。具体的には、光センサは、500nm〜780nm、最も好ましくは650nm〜750nm、又は690nm〜700nmの可視スペクトル範囲で感度を有してよい。具体的には、光センサは近赤外領域で感度を有してよい。具体的には、光センサは、シリコンフォトダイオードが適用可能な特に700nm〜1000nmの範囲の近赤外領域の部分で感度を有してよい。光センサは、具体的には、赤外スペクトル範囲、具体的には780nm〜3.0μmの範囲で感度を有してよい。例えば、光センサは、それぞれ独立に、フォトダイオード、フォトセル、光伝導体、フォトトランジスタ又はそれらの任意の組み合わせからなる群から選択される少なくとも1つの要素であってもよく、又はそれらを含んでもよい。例えば、光センサは、CCDセンサ要素、CMOSセンサ要素、フォトダイオード、フォトセル、光伝導体、フォトトランジスタ又はそれらの任意の組み合わせからなる群から選択される少なくとも1つの要素であってもよく、又はそれを含んでもよい。他の任意のタイプの感光性要素を使用してもよい。以下でさらに詳細に概説されるように、感光性要素は、一般に、完全に又は部分的に無機材料で作製されることができ、及び/又は、完全に又は部分的に有機材料で作製されることができる。最も一般的には、以下でさらに詳細に概説するように、市販のフォトダイオード、例えば、無機半導体フォトダイオードなどの1つ以上のフォトダイオードが使用され得る。
少なくとも1つの光センサが各光受信ファイバの出口端に配置されてよい。あるいは、少なくとも2つ以上の光受信ファイバが、同一の光センサを用いてよい。光受信ファイバの端部の光センサは、光センサに向かって光受信ファイバを出射する光ビームの輝度出力の少なくとも80%、好ましくは少なくとも90%、より好ましくは少なくとも99%が、少なくとも1つの光センサに衝突するように配置されてよい。物体から測定装置に進む光ビームが光受信ファイバに衝突する、転送装置に相対する位置は、高いダイナミックレンジを有する結合信号Qを得るように最適化され得る。
照射源及び/又は光放射ファイバの出口面、及び光受信ファイバの一方又は両方の入口面は、転送装置の光軸から相対的な空間的オフセットを有して配置されてよい。特に、照射源及び/又は光放射ファイバの出口面、及び光受信ファイバの一方又は両方の入口面は、光軸から異なる空間的オフセットを有して配置されてよい。そのような配置は、結合信号Qの傾向、ひいては距離測定の精度を高めることを可能にすることができる。特に、空間的オフセットの増加に伴い、Q対距離の図の傾きが増加し、したがって、類似の距離をより正確に区別することが可能になる。例えば、照射源の1つと光受信ファイバの一方又は両方の入口面を光軸上に配置することができ、他方を光軸から離間して配置してもよい。例えば、照射源及び光受信ファイバの一方又は両方の入口面の両方が、光軸から少なくとも1つの異なる距離離間して、特に光軸に対して垂直に配置されてよい。例えば、少なくとも2つの光受信ファイバが、光軸から異なる距離に配置されてよい。光受信ファイバは、照射源及び/又は光センサを移動させることなく、照射源と光センサとの間の光軸に垂直な実際の距離と比較して、より大きな距離を模倣するように適合されてよい。
光センサ及び/又は少なくとも1つの光受信ファイバの入口面は、焦点からずれて(オフフォーカスで)配置されてよい。本明細書で使用される場合、「焦点」という用語は、一般に、転送装置によって引き起こされる光ビーム、特に、物体の1つの点から放出される少なくとも1つの光ビームの錯乱円の最小範囲又は転送装置の焦点距離の一方又は両方を指す。本明細書で使用される場合、「錯乱円」という用語は、転送装置によって集束される光ビームの円錐状の光線によって引き起こされる光スポットを指す。錯乱円は、転送装置の焦点距離f、物体から転送装置までの縦方向距離、転送装置の射出瞳の直径、転送装置から感光エリアまでの縦方向距離、転送装置から物体の画像までの距離に依存し得る。例えば、ガウスビームの場合、錯乱円の直径はガウスビームの幅であり得る。特に、検出器から無限の距離に位置又は配置された点状の物体の場合、転送装置は、物体からの光ビームを転送装置の焦点距離で焦点に集束させるように適合され得る。検出器から無限の距離に位置又は配置された非点状の物体の場合、転送装置は、物体の少なくとも1つの点からの光ビームを転送装置の焦点距離で焦点面に集束させるように適合され得る。測定ヘッドから無限の距離に位置しないか又は配置されていない点状の物体については、錯乱円は少なくとも1つの縦方向座標において最小の広がりを有することができる。測定ヘッドから無限の距離に位置しないか又は配置されていない非点状の物体については、物体の少なくとも1つの点からの光ビームの錯乱円は、少なくとも1つの縦方向座標において最小の広がりを有することができる。本明細書で使用される場合、「オフフォーカスで配置される」という用語は、一般に、転送装置又は転送装置の焦点距離によって引き起こされる光ビームの錯乱円の最小広がり以外の位置を指す。特に、焦点又は錯乱円の最小の広がりは、縦方向座標lfocusの位置にあってよく、各光センサの位置及び/又は少なくとも1つの光ファイバの入口面は、lfocusとは異なる縦方向座標lsensorを有してよい。例えば、縦方向座標lsensorは、縦方向において、縦方向座標lfocusよりも転送装置に近い位置に配置されてもよいし、縦方向座標lfocuseよりも転送装置の位置から離れた位置に配置されてもよい。このように、縦方向座標lsensor及び縦方向座標lfocusは、転送装置から異なる距離に配置されてよい。例えば、光センサ及び/又は少なくとも1つの光受信ファイバの入口面は、焦点距離の±2%、好ましくは焦点距離の±10%、最も好ましくは焦点距離の±20%で、縦方向で錯乱円の最小広がりから離れていてよい。例えば、転送装置の焦点距離は20mmであってよく、縦方向座標lsensorは19.5mmであってよく、すなわち、センサ及び/又は光受信ファイバの少なくとも1つの入口面は、lsensorが焦点から焦点距離の2.5%だけ離れているように、97.5%の焦点距離で配置されてよい。
例えば、光受信ファイバの少なくとも1つの入口面は、結合信号の距離依存性の分散が最大となるように配置されてよく、これは結合信号Qにおける最大ダイナミックレンジに相当する。この理論に束縛されることを望まないが、ダイナミックレンジを最大化するための実用的な近似は、距離依存性にかかる錯乱円の分散を最大化することである。小さい物体距離と大きい物体距離における錯乱円半径の商は、小さい物体距離と大きい物体距離における結合信号の商への実用的な近似である。特に、光受信ファイバの少なくとも1つの入口面は、大きな物体距離での結合信号Qfarと小さな物体距離での結合信号Qcloseが最大の変動を有するように配置されてよい。
ここで、式中、以下の数式3は、小さな物体距離における錯乱円の半径であり、以下の数式4は、大きな物体距離における錯乱円の半径であり、式中、zoは、光受信ファイバの少なくとも1つの入口面と物体との間の検出可能な距離範囲であり、zsは、転送装置と光受信ファイバの少なくとも1つの入口面との間の距離であり、ziは、物体zoの位置に依存する転送装置の後方にある焦点化画像の位置である。
光受信ファイバの最適位置、具体的には、物体から測定ヘッドに進む光ビームが光受信ファイバに衝突する光受信ファイバの端部の位置は、以下のステップを使用して調整することができる:i)光受信ファイバの少なくとも1つの入口面を、最も遠い物体距離の焦点位置に配置すること;ii)焦点位置からの距離Δが最良の錯乱円変動と最大範囲を与えるように、光センサ及び/又は光受信ファイバの少なくとも1つの入口面を焦点から、特に光軸に沿って、又は光軸に対して移動させること。ここで、
であり、O
sizeは少なくとも1つの光受信ファイバの入口面上のスポットサイズであり、fは転送装置の焦点距離であり、F
#は転送装置のF値であり、式中、
は最も遠い物体距離である。
上述したように、測定ヘッドは、少なくとも2つの光受信ファイバ、特に少なくとも2つの受信ファイバを備え、第1受信ファイバは、物体から測定ヘッドに伝播する光ビームの少なくとも一部を第1光センサに提供するように適合され、第2受信ファイバは、物体から測定ヘッドに伝播する光ビームの少なくとも一部を第2光センサに提供するように適合されている。測定ヘッドは、複数の光受信ファイバを含んでいてよく、光受信ファイバのそれぞれは、物体から測定ヘッドに伝播する光ビームの少なくとも一部を光センサの1つに提供するように適合されている。受信ファイバのそれぞれの入口面の幾何学的中心は、縦方向座標lcenter,iに配置されていてよく、ここで、iはそれぞれの受信ファイバの番号を表す。検出器は、正確に2つの光センサを含むことができ、及び/又は測定ヘッドはそれぞれが入口面を含むことができる正確に2つの受信ファイバを含むことができる。検出器は、2つ以上の光センサを含むことができ、及び/又は測定ヘッドは2つ以上の受信ファイバを含むことができる。受信ファイバは、少なくとも1つの第1入口面を有する少なくとも1つの第1受信ファイバ、及び少なくとも1つの第2入口面を有する少なくとも1つの第2受信ファイバを含むことができる。第1入口面、特に幾何学的中心は、第1縦方向座標lcenter,1に配置されてよく、第2入口面、特に幾何学的中心は、第2縦方向座標lcenter,2に配置されてよく、第1縦方向座標と第2縦方向座標とは異なる。例えば、第1入口端と第2入口端は、光軸方向にオフセットした異なる平面内に配置されていてよい。第1入口端は、第2入口端の前方に配置されていてよい。第1入口端と第2入口端の相対的な距離は、例えば、焦点距離又は物体距離に依存してよい。光受信ファイバの入口面の縦方向座標も、同一であってよい。具体的には、受信ファイバの入口面の縦方向座標は同一であってもよいが、受信ファイバの入口面は、光軸から異なる空間的オフセットで離間していてよい。第1光受信ファイバと第2光受信ファイバは、共通の中心軸を有するように配置されてよい。第1光受信ファイバと第2光受信ファイバは、同心円状に配置されてよい。第1光受信ファイバは、第2光受信ファイバを取り囲んでいてよい。例えば、第1入口面及び第2入口面は、円形であってもよく、ここで、第1入口面は、第1半径を有する円であってよく、第2入口面は、第1半径とは異なる第2半径を有する円であってよい。追加的又は代替的に、第1入口面は、第2入口面から離間されていてよい。第1入口面は、第2入口面の前に配置されてもよく、第2入口面から50mm以下、好ましくは15mm以下離間されて配置されてよい。第1光センサと第2光センサとの相対距離は、例えば、焦点距離又は物体距離に依存し得る。
光受信ファイバの各入口面の各幾何学的中心は、受信ファイバの各入口面が位置するビーム経路又は各ビーム経路の光軸など、転送装置の光軸から間隔をあけて配置されてよい。それぞれが1つの入口面を含む正確に2つの受信ファイバを含む測定ヘッドの場合、及び2つ以上の受信ファイバを含む測定ヘッドの場合、受信ファイバは、光軸から第1空間的オフセットだけ離間された少なくとも1つの第1入口面を含む少なくとも1つの第1受信ファイバ、及び、光軸から第2空間的オフセットだけ離間された少なくとも1つの第2入口面を含む少なくとも1つの第2受信ファイバを含むことができ、ここで、第1空間的オフセット及び第2空間的オフセットは異なってよい。一例として、第1及び第2空間的オフセットは、少なくとも1.2倍、より好ましくは少なくとも1.5倍、より好ましくは少なくとも2倍異なっていてもよい。空間的オフセットはまた、光受信ファイバの縦方向座標及び/又は入口面の断面が異なっている場合、ゼロであってもよいし、負の値を想定してよい。
光受信ファイバは第1断面を有する少なくとも1つの第1受信ファイバ、及び第2断面を有する少なくとも1つ第2受信ファイバを含んでよい。「断面」という用語は、受信ファイバの延在方向に垂直な領域を指す。2つ以上の受信ファイバを含む測定ヘッドの場合、光受信ファイバの第1グループ又は少なくとも1つの光受信ファイバは第1断面を形成することができ、光受信ファイバの第2グループ又は少なくとも1つの他の光受信ファイバは第2断面を形成することができる。第1断面と第2断面とは異なっていてよい。特に、第1断面と第2断面とは一致しない。このように、第1受信ファイバの断面と第2受信ファイバの断面は、形状又は内容のいずれか1つ以上が異なっていてよい。例えば、第1断面は、第2断面よりも小さくてよい。一例として、第1断面と第2断面の両方は、円の形状を有していてよい。第1入口面の第1の円の半径は、第2入口面の第2の円の対応する半径よりも小さくてよい。具体的には、第1断面の直径は、第2断面の直径よりも小さくてよい。また、代替的に、一例として、第1断面は第1等価直径を有してよく、第2断面は第2等価直径を有してよく、ここで、第1等価直径は第2等価直径よりも小さい。断面は、空間的オフセット及び/又は受信ファイバの入口面の縦方向座標が異なる場合には、一致してよい。
評価装置は、まず、センサ信号の結合信号Qを評価することにより、物体の少なくとも1つの縦方向座標zを決定するように構成されている。本明細書で一般的に使用される場合、「結合」という用語は、一般的に、信号などの2つ以上の構成要素が、少なくとも1つの併合された結合信号を形成するために数学的に併合され、及び/又は、少なくとも1つの比較信号又は比較結果を形成するために比較される、任意の操作を指し得る。本明細書で使用される場合、「結合信号Q」という用語は、センサ信号を結合することによって、特に、センサ信号を除算すること、センサ信号の倍数を除算すること、又はセンサ信号の線形結合を除算することのうちの1つ以上によって、生成される信号を指す。特に、結合信号は、商信号であってよい。結合信号Qは、様々な手段を用いて決定されてよい。一例として、結合信号を導出するためのソフトウェア手段、結合信号を導出するためのハードウェア手段、又はその両方を用いてよく、評価装置に実装してもよい。したがって、評価装置は、一例として、少なくとも1つのデバイダを含んでもよく、ここで、デバイダは、商信号を導出するように構成される。デバイダは、完全に又は部分的に、ソフトウェアデバイダ又はハードウェアデバイダの一方又は両方として具現化されてよい。
評価装置は、センサ信号を徐算すること、センサ信号の倍数を徐算すること、センサ信号の線形結合を徐算することのうちの1つ以上によって、結合信号Qを導出するように構成されてよい。評価装置は、結合信号Qと縦方向座標との間の少なくとも1つの所定の関係を用いて縦方向座標を決定するように構成されてよい。例えば、評価装置は、以下の数式7によって結合信号Qを導出するように構成されている。
ここで、式中、x及びyは横方向座標、A1及びA2は光センサの位置における光受信ファイバを通過した光ビームのビームプロファイルの面積、E(x、y、zo)は物体距離zoで与えられるビームプロファイルを表す。面積A1と面積A2は異なっていてよい。具体的に、A1とA2は、一致していない。したがって、A1及びA2は、形状又は内容のうちの1つ以上が異なっていてよい。ビームプロファイルは、光ビームの断面であってよい。ビームプロファイルは、台形ビームプロファイル;三角形ビームプロファイル;円錐ビームプロファイル及びガウスビームプロファイルの線形結合からなる群から選択されてよい。一般に、ビームプロファイルは、輝度L(zo)及びビーム形状S(x,y;zo)に依存し、E(x,y;zo)=L・Sである。このように、結合信号を導出することで、輝度から独立した縦方向の座標を決定することができる。さらに、結合信号を使用することにより、物体の大きさとは無関係に距離z0を決定することができる。このように、結合信号は、物体の材料特性及び/又は反射特性及び/又は散乱特性とは無関係に、及び、例えば製造精度、熱、水分、汚れ、レンズの損傷などによる光源の変化とは無関係に、距離z0を決定することを可能にする。
センサ信号の各々は、光受信ファイバを通過した光ビームのビームプロファイルの少なくとも1つの領域の少なくとも1つの情報を含んでよい。本明細書で使用される場合、「ビームプロファイルの領域」という用語は、一般に、結合信号Qを決定するために使用されるセンサ位置におけるビームプロファイルの任意の領域を指す。光受信ファイバの感光エリア及び/又は入口面は、第1センサ信号がビームプロファイルの第1領域の情報を含み、第2センサ信号がビームプロファイルの第2領域の情報を含むように配置されてよい。ビームプロファイルの第1領域とビームプロファイルの第2領域は、隣接する領域又は重複する領域のいずれか一方又は両方であってよい。ビームプロファイルの第1領域とビームプロファイルの第2領域は、領域が一致していなくてよい。
評価装置は、ビームプロファイルの第1領域及びビームプロファイルの第2領域を決定及び/又は選択するように構成されてよい。ビームプロファイルの第1領域は、ビームプロファイルの実質的にエッジ情報を含んでよく、ビームプロファイルの第2領域は、ビームプロファイルの実質的に中心情報を含んでよい。ビームプロファイルは、中心、すなわちビームプロファイルの最大値及び/又はビームプロファイルのプラトーの中心点及び/又は光スポットの幾何学的中心と、中心から延びる立下りエッジとを有してよい。第2領域は、断面の内側領域を含んでよく、第1領域は、断面の外側領域を含んでよい。本明細書で使用される場合、「実質的に中心情報」という用語は、一般に、中心情報の割合、すなわち中心に対応する強度分布の割合と比較して、エッジ情報の割合が低いこと、すなわちエッジに対応する強度分布の割合が低いことを指す。好ましくは、中心情報は、10%未満、より好ましくは5%未満、のエッジ情報の割合を有し、最も好ましくは、中心情報はエッジ内容を含まない。本明細書で使用される場合、「実質的にエッジ情報」という用語は、一般に、エッジ情報の割合と比較して、中心情報の割合が低いことを指す。エッジ情報は、ビームプロファイル全体の情報、特に中心領域及びエッジ領域からの情報を含み得る。エッジ情報は、10%未満、好ましくは5%未満の中心情報の割合を有し、より好ましくは、エッジ情報は中心情報を含まない。ビームプロファイルが中心に近いか又はその周囲にあり、実質的に中心情報を含む場合は、ビームプロファイルの少なくとも1つの領域は、ビームプロファイルの第2領域として決定及び/又は選択されてよい。ビームプロファイルが断面の立下りエッジの少なくとも部分を含む場合は、ビームプロファイルの少なくとも1つの領域は、ビームプロファイルの第1領域として決定及び/又は選択されてよい。例えば、断面の全領域が第1領域として決定されてよい。ビームプロファイルの第1領域を領域A2、ビームプロファイルの第2領域を領域A1としてよい。
エッジ情報は、ビームプロファイルの第1領域の光子数に関する情報を含むことができ、中心情報は、ビームプロファイルの第2領域の光子数に関する情報を含むことができる。評価装置は、ビームプロファイルの面積積分を決定するように適合されてよい。評価装置は、第1領域の積分及び/又は加算によってエッジ情報を決定するように適合されてよい。評価装置は、第2領域の積分及び/又は加算によって中心情報を決定するように適合されてよい。例えば、ビームプロファイルは台形ビームプロファイルであってよく、評価装置は、台形の積分値を決定するように適合されてよい。さらに、台形ビームプロファイルが想定される場合、エッジと中心信号の決定は、エッジの勾配と位置、ならびに中心プラトーの高さの決定などの台形ビームプロファイルの特性を利用し、幾何学的考察によってエッジと中心信号を導出する等価評価によって置き換えることができる。
追加的又は代替的に、評価装置は、光スポットの少なくとも1つのスライス又はカットから中心情報又はエッジ情報の一方又は両方を決定するように適合されてよい。これは、例えば、結合信号Qの面積積分をスライス又はカットに沿った線積分に置き換えることによって実現できる。精度を向上させるために、光スポットを通る複数のスライス又はカットを使用して平均化してもよい。楕円スポットプロファイルの場合には、複数のスライス又はカットにわたって平均化することにより、改善された距離情報が得られる場合がある。
評価装置は、エッジ情報と中心情報を除算すること、エッジ情報と中心情報の倍数を除算すること、エッジ情報と中心情報の線形結合を除算することのうちの1つ以上によって、結合信号Qを導出するように構成されてよい。したがって、実質的には、本方法の物理的な基礎として、光子比が使用されてよい。
本明細書でさらに使用される場合、「評価装置」という用語は、一般に、好ましくは少なくとも1つのデータ処理装置を使用することにより、より好ましくは、少なくとも1つのプロセッサ及び/又は少なくとも1つの特定用途向け集積回路を使用することにより、指定された操作を実行するように構成された任意の装置を指す。したがって、一例として、少なくとも1つの評価装置は、多数のコンピュータコマンドを含むそこに保存されたソフトウェアコードを有する少なくとも1つのデータ処理装置を備えることができる。評価装置は、1つ以上の指定された操作を実行するために、1つ以上のハードウェア要素を提供してもよいし、及び/又は、1つ以上の指定された操作を実行するために、そこで実行されるソフトウェアを1つ以上のプロセッサに提供してもよい。
本発明の一実施形態では、検出器は、
− 第1感光エリアを有する少なくとも1つの第1光センサであって、前記第1光センサは、第1光受信ファイバの1つを通過した光ビームによる第1感光エリアの照射に応答して、少なくとも1つの第1センサ信号を生成するように構成されている、少なくとも1つの第1光センサ;
− 第2感光エリアを有する少なくとも1つの第2光センサであって、前記第2光センサは、第2光受信ファイバの他の1つを通過した光ビームによる第2感光エリアの照射に応答して、少なくとも1つの第2センサ信号を生成するように構成されている、少なくとも1つの第2光センサ、
を備えることができる。
評価装置は、第1及び第2センサ信号を評価することにより、物体の少なくとも1つの縦方向座標zを決定するように構成されてよい。
光受信ファイバの入口面は、大きさ及び/又は形状が同一であってもよいし、異なっていてもよい。例えば、第1光受信ファイバの第1入口面は、第2光受信ファイバの第2入口面よりも小さくてもよい。第1入口面は、第2感光エリアよりも小さくてよい。本明細書で使用される場合、「より小さい」という用語は、第1入口面の表面積が、第2入口面の表面積よりも小さいという事実、例えば少なくとも0.9倍、たとえば少なくとも0.7倍、又は少なくとも0.5倍という事実を指す。一例として、第1入口面及び第2入口面の両方は、正方形又は長方形の形状を有することができ、第1入口面の正方形又は長方形の辺の長さは、対応する第2入口面の正方形又は長方形の辺よりも小さい。あるいは、一例として、第1入口面及び第2入口面の両方が、円の形状を有してもよく、第1入口面の直径が第2入口面の直径よりも小さい。また、代替的に、例として、第1入口面は第1等価直径を有してよく、第2入口面は第2等価直径を有してよく、第1等価直径は第2等価直径よりも小さい。第2入口面は第1入口面よりも大きくてよい。したがって、一例として、第2入口面は、少なくとも2倍、より好ましくは少なくとも3倍、最も好ましくは少なくとも5倍、第1入口面より大きくてよい。第1入口面は、具体的には、小さい入口面、好ましくは、光ビームがこの入口面を完全に照射するような、小さな入口面であってよい。したがって、典型的な光学構成に適用できる例として、第1入口面は、1mm2から150mm2の表面面積、より好ましくは10mm2から100mm2の表面面積を有することができる。入口面は、具体的には大面積であり得る。したがって、好ましくは、検出器の測定範囲内で、光スポットは、例えば光スポットが完全に第2入口面の境界内に完全に配置されるように、第2入口面内に完全に配置され得る。例えば典型的な光学構成で適用可能な例として、第2入口面は160mm2から1000mm2の表面面積、より好ましくは200mm2から600mm2の表面面積を有してよい。
第1入口面は、具体的には、光ビームの伝播方向において、第2入口面と重なっていてよい。光ビームは、第1入口面と、完全に又は部分的に第2入口面の両方を、照射してよい。したがって、一例として、検出器の光軸上に位置する物体から見た場合、第1入口面は、第1入口面が、物体から見た場合、第2入口面内に完全に位置するように、第2入口面の前方に位置してよい。この物体から光ビームが、第1及び第2入口面に向かって伝播するとき、光ビームは、第1入口面を完全に照射してもよく、第2入口面上に光スポットを形成してもよく、ここで、第1入口面によって形成された影が光スポット内に位置している。しかしながら、他の実施形態が可能であることに留意されたい。
第1及び第2入口面は、具体的には、検出器の1つで同一のビーム経路に直線的に配置されてよい。本明細書で使用される場合「直線的に」という用語は、一般に、入口面が1つの軸に沿って配置されることを指す。したがって、一例として、第1及び第2入口面は両方とも検出器の光軸上に配置されてよい。具体的には、第1及び第2入口面は、検出器の光軸に対して同心円状に配置されてよい。
第1入口面は、第2入口面の前に配置されてよい。したがって、一例として、第1入口面は、単に第2入口面の表面上に配置されてよい。追加的又は代替的に、第1入口面は、第2入口面から第1入口面の表面面積の平方根の5倍以下の間隔を空けてよい。追加的又は代替的に、第1入口面は、第2入口面の前に配置されてもよく、第2入口面から50mm以下、好ましくは15mm以下の間隔を空けてよい。
一例では、測定ヘッドは、
− 第1断面を有する少なくとも1つの第1受信ファイバであって、物体から測定ヘッドに伝播する光ビームの少なくとも一部を光センサの少なくとも1つの光センサに提供するように適合されている、第1受信ファイバと;
− 第2断面を有する少なくとも1つの第2受信ファイバであって、物体から測定ヘッドに伝播する光ビームの少なくとも一部を光センサの少なくとも1つの他の光センサに提供するように適合されている、第2受信ファイバと、
を備える。
第1断面は、第2断面よりも小さくてよい。
物体から測定ヘッドへと伝播する光ビームは、具体的には、例えば、第1受信ファイバの第1断面及び/又は第2受信ファイバの第2断面よりも大きい光ビームの幅により、第1断面及び/又は第2断面が光ビーム内に完全に位置するように、第1断面及び/又は第2断面を完全に照射することができる。反対に、好ましくは、物体から測定ヘッドに伝播する光ビームが、具体的には第1断面及び/又は第2断面を部分的に照射してもよい。光ビームに集束又はデフォーカス効果を有する少なくとも1つ以上の適切なレンズ又は要素、例えば適切な転送装置が、物体から測定ヘッドに伝播する光ビームの伝播方向に、受信ファイバの入口面の前に配置されていてもよい。
上で概説したように、第1断面は、第2断面よりも小さくてよい。本明細書で使用される場合、「より小さい」という用語は、第1断面が、例えば少なくとも0.9倍、例えば少なくとも0.7倍、又はさらに少なくとも0.5倍、第2断面よりも小さいという事実を指す。一例として、第1断面及び第2断面の両方は、円の形状を有してもよく、第1断面の直径が第2断面の直径よりも小さい。上で概説したように、第2断面は、第1断面よりも大きくてよい。したがって、一例として、第2断面は、第1断面よりも少なくとも2倍、より好ましくは少なくとも3倍、最も好ましくは少なくとも5倍大きくてよい。
具体的には、第1断面は、物体から検出器に伝播する光ビームの伝播方向において、第2断面と重なってよい。物体から検出器に伝播する光ビームは、第1断面と、完全に又は部分的に第2断面の両方を照射してよい。したがって、一例として、検出器の光軸上に位置する物体から見た場合、第1断面は、第1断面と第2断面とが同心であるように、第2断面の中心に位置してもよい。しかしながら、他の実施形態が可能であることに留意されたい。
第1及び第2受信ファイバの入口面は、具体的には、同一の縦方向座標に配置されていてもよいし、異なる縦方向座標に配置されていてもよい。したがって、一例として、第1入口面及び第2入口面の両方が、検出器の光軸上に配置されていてよい。具体的には、第1入口面及び第2入口面は、検出器の光軸に関して同心に配置されてよい。例えば、第1入口面は、第2入口面の前に配置されていてもよい。例えば、第1入口面は、第2入口面から第1入口面の断面の平方根の5倍以下の間隔を空けてよい。追加的又は代替的に、第1入口面は、第2入口面の前に配置されてもよく、第2入口面から50mm以下、好ましくは15mm以下の間隔を空けてよい。
2つの光センサの線形配置の代わりに、光センサは検出器の異なるビーム経路に配置されてよい。光受信ファイバは、第1光ビーム及び第2光ビームを生成するように適合されていてもよい。第1光ビーム及び第2光ビームは、異なる透過度で生成されてよい。第1光センサは、第1光ビームによる第1感光エリアの照射に応答して、第1センサ信号を生成するように構成されてよい。第2光センサは、第2光ビームによる第2感光エリアの照射に応答して第2センサ信号を生成するように構成されてよい。例えば、上述したように、光受信ファイバは少なくとも1つの多分岐光受信ファイバを含むことができ、該多分岐光ファイバは、入射光ビームが、第1入射角で第1ファイバに衝突し、第1入射角とは異なる第2入射角で第2ファイバに衝突し、それによって透過率が、この場合第1透過光ビームである第1光ビームと、この場合第2透過光ビームである第2光ビームとで異なるように、配置され得る。第1光センサ及び第2光センサの一方は、第1ファイバの出口端に配置され、他方の光センサは、第2ファイバの出口端に配置されてよい。
評価装置は、具体的には、第1及び第2センサ信号を除算することによって、第1及び第2センサ信号の倍数を除算することによって、又は第1及び第2センサ信号の線形結合を除算することによって、結合信号Qを導出するように構成されてよい。例として、Qは、Q=s1/s2又はQ=s2/s1として簡単に決定されてよく、ここでs1は第1センサ信号を示し、s2は第2センサ信号を示す。追加的又は代替的に、Qは、Q=a・s1/b・s2又はQ=b・s2/a・s1として決定されてよく、ここでa及びbは、一例として、予め定められているか、又は決定可能な実数である。追加的又は代替的に、Qは、Q=(a・s1+b・s2)/(c・s1+d・s2)として決定されてよく、ここでa、b、c及びdは、一例として、予め定められているか又は決定可能な実数である。後者の簡単な例として、Qは、Q=s1/(s1+s2)として決定されてよい。他の結合信号又は商信号が可能である。
典型的には、上述の構成において、Qは、物体の縦方向座標、及び/又は光スポットの直径又は等価直径などの光スポットのサイズの単調関数である。したがって、一例として、特に線形光センサが使用される場合、商Q=s1/s2は、光スポットのサイズの単調減少関数である。この理論に拘束されることを望まないが、これは、上述の構成において、第1信号s1及び第2信号s2の両方が、検出器に到達する光量が減少するため、光源までの距離が増すにつれて二乗関数として減少する、という事実によると考えられる。しかしながら、そこでは、第1信号s1は、第2信号s2よりも急速に減少し、実験で使用されたような光学構成では、像平面内の光スポットは成長し、したがって、より広いエリアにわたって拡大する。したがって、第1及び第2センサ信号の商は、光ビームの直径又は光スポットの直径が増加するにつれて連続的に減少する。さらに、商は、光ビームの総出力が第1センサ信号及び第2センサ信号の両方において1つの係数を形成するため、ほとんど光ビームの総出力から独立し得る。結果として、商Qは、第1及び第2センサ信号と、光ビームのサイズ又は直径との間の一意的かつ明確な関係を提供する二次信号を形成することができる。他方では、光ビームのサイズ又は直径は、入射光ビームが検出器に向かって伝播する物体と検出器自体の間の距離に依存するため、すなわち、物体の縦方向座標に依存するため、第1と第2センサ信号と縦方向座標の間に一意的かつ明確な関係が存在し得る。後者については、例えばWO2014/097181A1などを参照することができる。所定の関係は、例えばガウス光ビームの線形結合を仮定するなどの分析的考察により、例えば第1及び第2センサ信号を計測する測定、又は物体の縦方向座標の関数としてそこから導出される二次信号などの経験的測定により、又はその両方により決定され得る。
先行技術文献WO2014/097181A1に含まれる技術的課題、特にFiP効果を生成するために必要とされる技術的努力を考慮して、本発明は、非FiP光センサを使用することによって具体的に実現され得ることに留意されたい。実際には、FiP特性を有する光センサは、典型的には、焦点でそれぞれのセンサ信号に強いピークを示すため、光センサとしてFiPセンサを用いる本発明による検出器の測定範囲は、第1光センサと第2光センサが光ビームの焦点にある2つの位置との間の範囲に限定され得る。しかし、線形光センサ、すなわちFiP効果を示さない光センサを使用する場合、本発明の構成では、一般的にこの問題は回避され得る。結果として、第1及び第2光センサはそれぞれ、少なくとも測定範囲内で、それぞれの第1及び第2センサ信号が、それぞれの光センサの照射の総出力に依存し、照射の光スポットの直径から独立し得るように、線形信号特性を有してよい。しかしながら、他の実施形態も可能であることに留意されたい。
第1及び第2光センサは、それぞれ具体的には、半導体センサであり得、好ましくは無機半導体センサ、より好ましくはフォトダイオードであり、最も好ましくはシリコンフォトダイオードであり得る。したがって、複雑で高価なFiPセンサとは反対に、本発明は、単に、市販の無機フォトダイオード、すなわち、1つの小さなフォトダイオード及び1つの大面積フォトダイオードを使用することによって実現することができる。このように、本発明の構成は、安価で高価でない方式で実現することができる。
具体的には、第1及び第2光センサは、それぞれ独立して、赤外スペクトル範囲、好ましくは780nm〜3.0μmの範囲で感度を有し、及び/又は、可視スペクトル範囲、好ましくは380nm〜780nmの範囲で感度を有する無機フォトダイオードであり得るか、又はそれらを含み得る。具体的には、第1及び第2光センサは、シリコンフォトダイオードが適用可能な特に700nm〜1000nmの範囲で近赤外領域の部分で感度を有し得る。第1光センサ、第2光センサ、又は第1及び第2光センサの両方に使用できる赤外光センサは、市販の赤外光センサであってよく、例えば、ドイツのtrinamiX GmbH,D−67056 Ludwigshafen am RheinからHertzstueck(登録商標)というブランド名で市販されている赤外光センサであってよい。したがって、一例として、第1光センサ、第2光センサ、又は第1及び第2光センサの両方は、固有の光起電型の少なくとも1つの光センサ、より好ましくはGeフォトダイオード、InGaAsフォトダイオード、拡張InGaAsフォトダイオード、InAsフォトダイオード、InSbフォトダイオード、HgCdTeフォトダイオード、からなる群から選択される少なくとも1つの半導体フォトダイオードを含み得る。追加的又は代替的に、第1光センサ、第2光センサ、又は第1及び第2光センサの両方は、外因性光起電型の少なくとも1つの光センサ、より好ましくはGe:Auフォトダイオード、Ge:Hgフォトダイオード、Ge:Cuフォトダイオード、Ge:Znフォトダイオード、Si:Gaフォトダイオード、Si:Asフォトダイオードなる群から選択される少なくとも1つの半導体フォトダイオードを含み得る。追加的又は代替的に、第1光センサ、第2光センサ、又は第1及び第2光センサの両方は、少なくとも1つのボロメータ、好ましくはVOボロメータ及びアモルファスSiボロメータからなる群から選択されるボロメータなどを含み得る。
第1及び第2光センサは、それぞれ具体的には、単一の感光エリアを有する均一なセンサであり得る。したがって、第1及び第2光センサは、具体的には、非ピクセル化光センサであり得る。
上述したように、第1及び第2センサ信号を評価することによって、検出器は、物体全体、又は物体の1つ以上の部分の縦方向座標を決定する選択肢を含む、物体の少なくとも1つの縦方向座標を決定することを可能にすることができる。しかし、それに加えて、1つ以上の横方向座標及び/又は回転座標を含む物体の他の座標が、検出器によって決定されてよい。したがって、一例として、1つ以上の追加の横方向センサが少なくとも1つの横方向座標を決定するために使用されてよい。様々な横方向センサは、例えば、WO2014/097181A1に開示されている横方向センサ、及び/又は他の位置感知デバイス(PSD)、例えば、象限ダイオード、CCD又はCMOSチップなどが、当技術分野で一般的に知られている。これらの装置は、一般に、本発明による検出器にも実装することができる。一例として、光ビームの一部は、少なくとも1つのビーム分割要素によって検出器内で分割されてよい。分割部分は、一例として、CCD又はCMOSチップ又はカメラセンサなどの横方向センサに向かって案内されてよく、横方向センサ上の分割部分によって生成された光スポットの横方向位置が決定され、それによって物体の少なくとも1つの横方向座標が決定され得る。したがって、本発明による検出器は、例えば、簡単な距離測定装置のような一次元の検出器であってもよく、あるいは、二次元の検出器として、あるいは三次元の検出器として具現化されてもよい。さらに、上記に概説したように、又は以下にさらに詳細に概説するように、場景や環境を一次元的に走査することにより、三次元画像が作成されてもよい。したがって、本発明による検出器は、具体的には、一次元検出器、二次元検出器、三次元検出器のいずれであってもよい。評価装置はさらに、物体の少なくとも1つの横方向座標x、yを決定するように構成されてよい。
光センサは、バイセルダイオード又は象限ダイオードの部分ダイオードであってもよく、及び/又は少なくとも1つのCMOSセンサを含んでもよい。例えば、光センサは、CMOSセンサを含んでよい。評価装置は、CMOSセンサのセンサ領域を少なくとも2つのサブ領域に分割するように適合されてよい。具体的には、評価装置は、CMOSセンサのセンサ領域を、少なくとも1つの左部分と少なくとも1つの右部分とに分割するように適合されてもよく、及び/又は、少なくとも1つの上部分と少なくとも1つの下部分とに分割するように適合されてもよく、及び/又は、少なくとも1つの内側と少なくとも1つの外側とに分割するように適合されてもよい。評価装置は、少なくとも2つのサブ領域のセンサ信号からの結合信号Qを評価することにより、物体の少なくとも1つの縦方向座標zを決定するように構成されてよい。少なくとも1つのCMOSセンサを使用することにより、物体を照射するための照射源の移動を可能にすることができる。特に、少なくとも1つの光照射ファイバと光受信ファイバの独立した移動が可能であり得る。バイセルダイオード又は象限ダイオードの部分ダイオードとして配置された光センサを使用する場合、光受信ファイバと光照射ファイバは、相互に、特に固定的に接続されてよい。光照射ファイバを用いた照射に加えて、又は代替的に、任意の照射源から生成された光ビームによって物体を照射してもよい。特に、物体の照射は、光受信ファイバから独立して実施されてよい。
例えば、検出器は、光センサのマトリックスを有し、光センサはそれぞれ感光エリアを有する少なくとも1つのセンサ要素を含むことができ、そこでは、各光センサは、1つ以上の光受信ファイバを通過した光ビームによる感光エリアの照射に応答して、少なくとも1つのセンサ信号を生成するように構成されてよい。検出器は、検出器の異なるビーム経路に配置された2つのセンサ要素、特に少なくとも1つの第1センサ要素及び少なくとも1つの第2センサ要素を含むことができる。第1及び第2センサ要素のうちの一方は、第1ファイバの出口端に配置されてよく、他方のセンサ要素は、第2ファイバの出口端に配置されてよい。
評価装置は、
a)最高のセンサ信号を有する少なくとも1つの光センサを決定し、少なくとも1つの中心信号を形成すること;
b)マトリックスの光センサのセンサ信号を評価し、少なくとも1つの和信号を形成すること;
c)中心信号と和信号を結合させることにより、少なくとも1つの結合信号を決定すること;及び
d)結合信号を評価することにより、物体の少なくとも1つの縦方向座標zを決定すること、
によって、センサ信号を評価するように構成され得る。
本明細書で使用される場合、「センサ要素」という用語は、一般に、少なくとも1つのパラメータを感知するように構成された装置又は複数の装置の組み合わせを指す。この場合、パラメータは、具体的には光パラメータであってよく、センサ要素は、具体的には光センサ要素であってよい。センサ要素は、一体の単一装置として、又はいくつかの装置の組み合わせとして形成され得る。本明細書でさらに使用される場合、「マトリックス」という用語は、一般に、複数要素の所定の幾何学的順序における配置を指す。マトリックスは、以下にさらに詳細に概説するように、具体的には、1つ以上の行及び1つ以上の列を有する長方形のマトリックスであってもよく、又はそれを含んでもよい。行と列は、具体的には長方形方式に配置され得る。しかしながら、非長方形の配置などの他の配置も可能であることが説明される。一例として、円形の配置も可能であり、そこでは要素は中心点のまわりに同心の円又は楕円に配置される。例えば、マトリックスは、ピクセルの単一の行であってよい。他の配置も可能である。
マトリックスの光センサは、具体的には、大きさ、感度、及び他の光学的、電気的、機械的特性のうちの1つ以上で等しくてよい。マトリックスの全ての光センサの感光エリアは、具体的には、共通の平面内に配置されてよく、該共通平面は、好ましくは、光受信ファイバを通過した光ビームが該共通平面上に光スポットを生成するように、物体に面している。
例えばWO2012/110924A1又はWO2014/097181A1などの上記の先行技術文献の1つ以上においてより詳細に説明されるように、典型的には、光スポットの直径、ビームウェスト又は同等の直径などの光スポットのサイズと、光ビームが検出器に向かって伝播する物体の縦方向座標の間には、所定の又は決定可能な関係が存在する。理論に拘束されることを望まないが、光スポットは2つの測定変数:中心信号とも呼ばれる、光スポットの中心又は中心に近い小さな測定パッチで測定される測定信号と、中心信号の有無にかかわらず、光スポット上で積分された積分信号又は和信号によって特徴付けられる。ビームが拡大又は集束しても変化しない特定の総出力を有する光ビームの場合、和信号は光スポットのスポットサイズから独立しているべきであり、したがって、少なくとも線形光センサがそれぞれの測定範囲内で使用される場合、和信号は物体と検出器の間の距離から独立しているべきである。ただし、中心信号はスポットサイズに依存する。したがって、中心信号は、通常、光ビームが集束されると増加し、光ビームがデフォーカスすると減少する。したがって、中心信号と和信号を比較することにより、光ビームによって生成される光スポットのサイズに関する情報項目、したがって、物体の縦方向座標関する情報項目を生成することができる。中心信号と和信号の比較は、一例として、中心信号と和信号から結合信号Qを形成し、縦方向座標と結合信号の間の、所定の又は決定可能な関係を、縦方向座標を導出するために使用することによって、行うことができる。
光センサのマトリックスの使用は、複数の優位及び利益を提供する。このように、センサ要素上の、例えばセンサ要素のマトリックスの光センサの感光エリアの共通平面上の、光ビームによって生成される光スポットの中心は、物体の横方向の位置によって変化し得る。光センサのマトリックスを使用することにより、本発明による検出器は、これらの条件の変化に適応することができ、したがって、センサ信号を比較するだけで光スポットの中心を決定することができる。その結果、本発明による検出器は、それ自体で中心信号を選択し、和信号を決定し、及びこれらの2つの信号から、物体の縦方向座標に関する情報を含む結合信号を導出することができる。結合信号を評価することにより、物体の縦方向座標がこのように決定され得る。光センサのマトリックスの使用は、したがって、物体の位置、特に物体の横方向の位置に関して著しい柔軟性を提供する。
光センサのマトリックス上の光スポットの横方向位置、例えばセンサ信号を生成する少なくとも1つの光センサの横方向位置は、例えばWO2014/198629A1に開示されているように、それから物体の横方向位置に関する少なくとも1つの情報項目が導出される追加的な情報項目として使用されてよい。追加的又は代替的に、以下でさらに詳細に概説するように、本発明による検出器は、少なくとも1つの縦方向座標に加えて、物体の少なくとも1つの横方向座標を検出するための少なくとも1つの追加の横方向検出器を含んでもよい。
したがって、本発明によれば、「中心信号」という用語は、一般に、ビームプロファイルの実質的に中心の情報を含む少なくとも1つのセンサ信号を指す。本明細書で使用される場合、「最高のセンサ信号」という用語は、関心領域の局所最大値又は最大値の一方又は両方を指す。例えば、中心信号は、マトリックス全体又はマトリックス内の関心領域の光センサによって生成される複数のセンサ信号のうち、最も高いセンサ信号を有する少なくとも1つの光センサの信号であり得、該関心領域は、マトリックスの光センサによって生成される画像内で予め決定された、又は決定可能であり得る。中心信号は、単一の光センサから、又は以下でさらに詳細に概説されるように、一群の光センサから生じてもよく、後者の場合、一例として、一群の光センサのセンサ信号は、中心信号を決定するために、加算、積分、又は平均化され得る。中心信号が生じる光センサの一群は、最高のセンサ信号を有する実際の光センサから所定距離より短く離れた光センサなどの隣接する光センサの一群であり得、又は、最高のセンサ信号から所定範囲内にあるセンサ信号を生成する光センサの一群であり得る。中心信号が生じる光センサの一群は、最大のダイナミックレンジを可能にするように、できるだけ大きく選択され得る。評価装置は、複数のセンサ信号、例えば最高のセンサ信号を有する光センサの周りの複数の光センサのセンサ信号を積分することによって中心信号を決定するように適合されてもよい。例えば、ビームプロファイルは台形ビームプロファイルであり得、評価装置は、台形、特に台形のプラトーの積分を決定するように適合されてもよい。
同様に、「和信号」という用語は、一般に、ビームプロファイルの実質的にエッジ情報を含む信号を指す。例えば、和信号は、センサ信号を加算すること、センサ信号を積分すること、又はマトリックス全体又はマトリックス内の関心領域のセンサ信号を平均することによって導出することができ、該関心領域は、マトリックスの光センサによって生成される画像内で予め決定された、又は決定可能である。センサ信号を合計、積分、又は平均化する場合、センサ信号が生成される実際の光センサは、加算、積分、又は平均化から除外されてもよく、あるいは、加算、積分、又は平均化に含まれてもよい。評価装置は、マトリックス全体の、又はマトリックス内の関心領域の信号を積分することにより、和信号を決定するように適合され得る。例えば、ビームプロファイルは台形ビームプロファイルであり得、評価装置は、台形全体の積分を決定するように適合され得る。さらに、台形ビームプロファイルが想定される場合、エッジ信号と中心信号の決定は、エッジの勾配と位置の決定、及び中央プラトーの高さの決定など、台形ビームプロファイルの特性を利用し、そして幾何学的考察によってエッジ信号と中心信号を導出する等価評価に置き換えることができる。
追加的に又は代替的に、評価装置は、光スポットの少なくとも1つのスライス又はカットから中心情報又はエッジ情報の一方又は両方を決定するように適合され得る。これは、例えば、結合信号Qの面積積分を、スライス又はカットに沿った線積分で置き換えることによって実現することができる。精度を向上させるために、光スポットを通るいくつかのスライス又はカットを使用して平均化することができる。楕円形のスポットプロファイルの場合、いくつかのスライス又はカットを平均することによって距離情報が向上することがある。
同様に、本明細書で使用される「結合信号」という用語は、一般に、中心信号と和信号を結合して生成される信号を指す。具体的には、結合は、中心信号と和信号の商を形成すること、又はその逆の商を形成すること;中心信号の倍数と和信号の倍数の商を形成すること、又はその逆の商を形成すること;中心信号の線形結合と和信号の線形結合の商を形成すること、又はその逆の商を形成すること、の1つ以上によって決定されてもよい。追加的又は代替的に、結合信号は、中心信号と和信号の間の比較に関する情報の少なくとも1つの項目を含む任意の信号又は信号の結合を含み得る。
光ビームは、中心信号が生成される少なくとも1つの光センサが光ビーム内に完全に位置するように、センサ信号が生じる少なくとも1つの光センサの感光エリアより大きい光ビーム幅で、中心信号が生成される少なくとも1つの光センサを完全に照射してよい。反対に、好ましくは、光ビームは、光スポットがマトリックス内に完全に位置するように、マトリックスよりも小さい光スポットをマトリックス全体の上に生成してもよい。このような状況は、光学の当業者であれば、適切な転送装置を使用するなど、光ビームに集束又はデフォーカス効果を有する1つ以上の適切なレンズ又は要素を選択することによって、容易に調整することができる。本明細書でさらに使用される場合、「光スポット」は、一般に、光ビームによる物品、エリア、又は物体の可視又は検出可能な円形又は非円形の照射を指す。
上述したように、中心信号は、一般に、光スポットの中心にある光センサからのセンサ信号などの単一のセンサ信号であってもよいし、又は、光スポットの中心にある光センサから生じるセンサ信号の組合せなど、複数のセンサ信号の組合せであってもよいし、又は、前述の可能性の1つ以上から導出されるセンサ信号を処理することによって導出される二次センサ信号であってもよい。中心信号の決定は、センサ信号の比較が従来の電子機器によってかなり簡単に実施されるため、電子的に実行されてもよく、又は、ソフトウェアによって完全に又は部分的に実行されてもよい。具体的には、中心信号は、最高センサ信号;最高センサ信号からの所定の許容範囲内にあるセンサ信号の一群の平均;最高センサ信号を有する光センサを含む光センサの一群及び隣接する光センサの所定の一群からのセンサ信号の平均;最高センサ信号を有する光センサを含む光センサの一群及び隣接する光センサの所定の一群からのセンサ信号の合計;最高センサ信号から所定の許容範囲内にあるセンサ信号の一群の合計;所定の閾値を超えるセンサ信号の一群の平均;最高センサ信号を有する光センサの一群及び隣接する光センサの所定の一群からのセンサ信号の積分;最高センサ信号から所定の許容範囲内にあるセンサ信号の一群の積分;所定の閾値を超えるセンサ信号の一群の積分、からなる群から選択され得る。
上記で概説したように、光センサの未処理のセンサ信号は、評価、又はそれから導出される二次センサ信号に使用されてよい。本明細書で使用される場合、「二次センサ信号」という用語は、一般に、フィルタリング、平均化、又は復調など、1つ以上の未処理信号を処理することによって得られる、電子信号、より好ましくはアナログ及び/又はデジタル信号などの信号を指す。したがって、画像処理アルゴリズムが、マトリックスのセンサ信号の全体から、又はマトリックス内の関心領域から、二次センサ信号の生成に使用され得る。具体的には、評価装置などの検出器は、光センサのセンサ信号を変換し、それによって二次光センサ信号を生成するように構成され得、該評価装置は、二次光センサ信号を使用してステップa)〜d)を実行するように構成される。センサ信号の変換は、具体的には、以下:フィルタリング;少なくとも1つの関心領域の選択;センサ信号によって生成された画像と少なくとも1つのオフセットとの間の差分画像の形成;センサ信号によって生成された画像を反転することによるセンサ信号の反転;異なる時間にセンサ信号によって生成された画像間の差分画像の形成;背景補正;カラーチャネルへの分解;色相への分解;飽和;そして輝度チャネル;周波数分解;特異値分解;キャニーエッジ検出器の適用;ガウスフィルタのラプラシアンの適用;ガウスフィルタの差分の適用;ソーベル演算子の適用;ラプラス演算子の適用;Scharr演算子の適用;プレウィット演算子の適用;ロバーツ演算子の適用;Kirsch演算子の適用;ハイパスフィルタの適用;ローパスフィルタの適用;フーリエ変換の適用;ラドン変換の適用;ハフ変換の適用;ウェーブレット変換の適用;閾値処理;バイナリイメージの作成、からなる群から選択される少なくとも1つの変換を含み得る。関心領域は、ユーザにより手動によって決定されるか、あるいは、光センサによって生成された画像内で物体を認識することによってなど、自動で決定され得る。一例として、車両、人、又は別のタイプの所定の物体は、画像内で、すなわち、光センサによって生成されたセンサ信号全体内で自動画像認識によって決定され得、関心領域は、物体が該関心領域内に位置するように選択され得る。この場合、縦方向座標の決定などの評価は、関心領域に対してのみ実行されるようにすることができる。ただし、他の実施も可能である。
上記で概説したように、光スポットの中心の検出、すなわち、中心信号及び/又は中心信号が生じる少なくとも1つの光センサの検出は、完全に又は部分的に電子的に実行され得、又は1つ以上のソフトウェアアルゴリズムを使用して完全に又は部分的に実行され得る。具体的には、評価装置は、少なくとも1つの最高のセンサ信号を検出するため、及び/又は中心信号を形成するための少なくとも1つの中心検出器を備えることができる。中心検出器は、具体的には、完全に又は部分的にソフトウェアで具体化されてもよく、及び/又は完全又は部分的にハードウェアで具体化されてもよい。中心検出器は、少なくとも1つのセンサ要素に完全に又は部分的に一体化されてもよく、及び/又はセンサ要素から独立して完全に又は部分的に具体化されてもよい。
上記で概説したように、和信号は、マトリックスの全てのセンサ信号から、関心領域内のセンサ信号から、又は中心信号に寄与する光センサから生じるセンサ信号を除いたこれらの可能性の1つから導出できる。全ての場合において、縦方向座標を決定するために、中心信号と確実に比較することができる信頼できる和信号が生成され得る。一般に、和信号は、マトリックスの全てのセンサ信号の平均;マトリックスの全てのセンサ信号の合計;マトリックスの全てのセンサ信号の積分;中心信号に寄与する光センサからのセンサ信号を除く、マトリックスの全てのセンサ信号の平均;中心信号に寄与する光センサからのセンサ信号を除く、マトリックスの全てのセンサ信号の合計;中心信号に寄与する光センサからのセンサ信号を除く、マトリックスの全てのセンサ信号の積分;最高のセンサ信号を有する光センサから所定の範囲内の光センサのセンサ信号の合計;最高のセンサ信号を有する光センサから所定の範囲内の光センサのセンサ信号の積分;最高のセンサ信号を有する光センサから所定の範囲内に位置する光センサの所定の閾値を超えるセンサ信号の合計;最高のセンサ信号を有する光センサから所定の範囲内にある光センサの所定の閾値を超えるセンサ信号の積分、からなる群から選択され得る。しかしながら、他の選択肢がある。
加算は、完全に又は部分的にソフトウェアで実行されてもよく、及び/又は完全に又は部分的にハードウェアで実行されてもよい。加算は一般に、典型的には検出器に容易に実装され得る純粋に電子的手段によって可能である。したがって、電子工学の分野では、加算装置は一般に、アナログ信号とデジタル信号の両方の2つ以上の電気信号を加算することが知られている。したがって、評価装置は、和信号を形成するための少なくとも1つの加算装置を備えることができる。加算装置は、完全に又は部分的にセンサ要素に一体化されてもよく、又は完全に又は部分的にセンサ要素とは独立して具体化されてもよい。加算装置は、完全に又は部分的に、ハードウェア又はソフトウェアの一方又は両方で具体化されてもよい。
上で概説したように、中心信号と和信号との間の比較は、具体的には、1つ以上の商信号を形成することによって実行されてもよい。したがって、一般的に、結合信号は、中心信号と和信号の商を形成すること、又はその逆の商を形成すること;中心信号の倍数と和信号の倍数の商を形成すること、又はその逆の商を形成すること;中心信号の線形結合と和信号の線形結合の商を形成すること、又はその逆の商を形成すること;中心信号の商と和信号と中心信号の線形結合の商を形成すること、又はその逆の商を形成すること;和信号の商と和信号と中心信号の線形結合の商を形成すること、又はその逆を形成すること;中心信号のべき乗と和信号のべき乗の商を形成すること、又はその逆の商を形成すること、のうちの1つ以上によって導出される商信号であってもよい。しかし、他の選択肢も存在する。評価装置は、1つ以上の商信号を形成するように構成されていてもよい。評価装置は、少なくとも1つの商信号を評価することにより、少なくとも1つの縦方向座標を決定するようにさらに構成されてもよい。
評価装置は、具体的には、少なくとも1つの縦方向座標を決定するために、結合信号Qと縦方向座標の間の少なくとも1つの所定の関係を使用するように構成されてよい。このように、上記に開示された理由により、及び光スポットの特性の縦方向座標への依存性により、結合信号Qは、典型的には、縦方向座標の単調関数であり、及び/又は、光スポットの直径又は等価直径のような光スポットのサイズの単調関数である。したがって、一例として、具体的に線形光センサが使用される場合、センサ信号scenterと和信号ssumの簡単な商Q=scenter/ssumは、距離の単調減少関数であり得る。理論に拘束されることを望まないが、これは、上記の好ましい構成では、検出器に到達する光の量が減少するため、光源までの距離の増加に伴って、中心信号scenterと和信号ssumの両方が、二乗関数として減少するという事実が原因であると考えられる。しかしながら、そこでは、中心信号scenterは、実験で使用される光学構成では、画像平面内の光スポットが増大し、したがってより広いエリアに広がるため、和信号ssumよりも急速に減少する。中心信号と和信号の商は、したがって、マトリックスの光センサの感光エリア上の光ビーム又は光スポットの直径の増加に伴って連続的に減少する。さらに、商は、光ビームの総出力が中心信号と和センサ信号の両方の係数を形成するため、通常、光ビームの総出力から独立している。その結果、商Qは、中心信号と和信号との間、及び光ビームのサイズ又は直径との間の一意的かつ明確な関係を提供する二次信号を形成し得る。一方、光のサイズ又は直径は、光ビームが検出器に向かって伝播する物体と検出器自体の間の距離に依存するため、つまり、物体の縦方向座標に依存するため、一方では中心信号と和信号の間で、他方では中心信号と縦方向座標の間に、一意的かつ明確な関係が存在し得る。後者については、例えばWO2014/097181A1などの上記の先行技術文献のうちの1つ以上に対して参照することができる。所定の関係は、例えばガウス光ビームの線形結合を仮定することによる分析的考察により、また例えば結合信号及び/又は中心信号及び和信号又はそこから導出される二次信号を、物体の縦方向座標の関数として計測する測定などの経験的測定により、又はその両方により、決定することができる。
このように、一般的に評価装置は、商信号などの結合信号Qを評価することによって、縦方向座標を決定するように構成され得る。この決定は、例えば中心信号と和信号を直接結合してその縦方向座標を導出することによってなど、1ステップの過程であってもよいし、例えば第1に中心信号と和信号から結合信号を導出し、第2に結合信号から縦方向座標を導出するような複数ステップの過程であってもよい。両方の選択肢、すなわちステップc)とd)が別個の独立したステップである選択肢と、ステップc)とd)が完全に又は部分的に組み合わされる選択肢である、両方の選択肢が本発明に含まれるものとする。
評価装置は、結合信号と縦方向座標との間の少なくとも1つの所定の関係を使用するように構成されてよい。所定の関係は、経験的関係、半経験的関係、及び分析的に導出された関係のうちの1つ以上であってよい。評価装置は、所定の関係を保存するための少なくとも1つのデータ記憶装置、例えばルックアップリスト又はルックアップテーブルを備えることができる。
上記で概説したように、光センサは、具体的には、光検出器、好ましくは無機光検出器、より好ましくは無機半導体光検出器、最も好ましくはシリコン光検出器であってもよいし、又はそれらを含んでよい。具体的には、光センサは、赤外スペクトル範囲において感度を有していてもよい。マトリックスの光センサの全て、又はマトリックスの光センサの少なくとも一群は、具体的には同一であってもよい。マトリックスの同一の光センサの群は、具体的には、異なるスペクトル範囲に提供されてもよく、又は全ての光センサは、スペクトル感度に関して同一であってもよい。さらに、光センサは、サイズ及び/又はそれらの電子的又は光電子的特性に関して同一であってもよい。
マトリックスは、独立した光センサで構成されていてもよい。したがって、無機フォトダイオードのマトリックスを構成することができる。しかしながら、代替的に、CCD検出器チップなどの1つ以上のCCD検出器、及び/又はCMOS検出器チップなどCMOS検出器などの市販のマトリックスが使用されてもよい。
したがって、一般に、検出器の光センサは、センサアレイを形成してもよく、又は上述のマトリックスなどのセンサアレイの一部であってもよい。したがって、一例として、検出器は、m行及びn列を有し、ここでm、nは独立して正の整数である、長方形アレイなどの光センサアレイを備えることができる。好ましくは、1つ以上の列及び1つ以上の行が与えられ、すなわち、n>1、m>1である。したがって、一例として、nは2〜16以上であり得、mは2〜16以上であり得る。好ましくは、行数と列数の比は1に近い。一例として、n及びmは、m/n=1:1、4:3、16:9又は同様のものを選択することなどにより、0.3≦m/n≦3となるように選択され得る。一例として、アレイは、m=2、n=2又はm=3、n=3などを選択することなどにより、等しい数の行及び列を有する正方形アレイであってもよい。
上記でさらに概説したように、マトリックスは、具体的には、少なくとも1行、好ましくは複数行及び複数列を有する長方形のマトリックスであってよい。一例として、行及び列は、実質的に垂直な方向に方向付けられてよく、「実質的に垂直」という用語に関しては、上記の定義を参照することができる。したがって、一例として、20°より小さい、具体的には10°より小さい、又は5°より小さい許容誤差でさえ許容され得る。広い視野を提供するために、マトリックスは、具体的には、少なくとも10行、好ましくは少なくとも50行、より好ましくは少なくとも100行を有してもよい。同様に、マトリックスは、少なくとも10列、好ましくは少なくとも50列、より好ましくは少なくとも100列を有してもよい。マトリックスは、少なくとも50個の光センサ、好ましくは少なくとも100個の光センサ、より好ましくは少なくとも500個の光センサを含み得る。マトリックスは、数メガピクセルの範囲の数のピクセルを含み得る。しかしながら、他の実施形態も可能である。したがって、上述したように、軸回転対称性が期待される構成では、ピクセルとも呼ばれ得るマトリックスの光センサの円形配置又は同心配置が好ましいことがある。
照射源は、複数の照射領域が、光センサのマトリックス、例えばCMOS検出器上に生成されるように、点群を生成及び/又は投影するように適合されてよい。さらに、外乱、例えば斑点及び/又は外来光及び/又は多重反射による外乱は、光センサのマトリックス上に存在してもよい。評価装置は、少なくとも1つの関心領域、例えば、物体の縦方向座標の決定に使用される、光ビームによって照射される1つ以上のピクセルを決定するように適合されてよい。例えば、評価装置は、フィルタリング方法、例えば、ブロブ分析及び/又は物体認識方法を実行するように適合されてよい。
上述したように、中心信号及び和信号を評価することによって、検出器は、物体全体又は物体の1つ以上の部分の縦方向座標を決定する選択肢を含めて、物体の少なくとも1つの縦方向座標を決定することができる。しかしさらに、1つ以上の横方向座標及び/又は回転座標を含む物体の他の座標が、検出器、特に評価装置によって決定され得る。したがって、一例として、1つ以上の横方向センサが、物体の少なくとも1つの横方向座標を決定するために使用されてよい。上述したように、中心信号が生じる少なくとも1つの光センサの位置は、物体の少なくとも1つの横方向座標に関する情報を提供することができ、ここで、一例として、単純なレンズ方程式が、光学的変換、及び横方向座標の導出のために使用されてよい。追加的又は代替的に、1つ以上の追加の横方向センサが使用されてよく、検出器によって含まれてよい。種々の横方向センサ、例えばWO2014/097181A1に開示されている横方向センサ及び/又は例えば象限ダイオード、CCD又はCMOSチップなどの他の位置感知装置(PSD)が、当技術分野で一般に知られている。追加的又は代替的に、例として、本発明による検出器は、R.A.Street:Technology and Applications of Amorphous Silicon,Springer−Verlag Heidelberg、2010、346〜349頁に開示されている1つ以上のPSDを含むことができる。他の実施形態も可能である。これらの装置は、一般に、本発明による検出器に実装されてもよい。一例として、光ビームの一部は、少なくとも1つのビーム分割要素によって、検出器内で分割されてもよい。分割部分は、一例として、CCD又はCMOSチップ又はカメラセンサのような横方向センサに向かって案内されてもよく、横方向センサ上の分割部分によって生成される光スポットの横方向位置が決定され、それによって少なくとも1つの横方向座標が決定され得る。したがって、本発明による検出器は、簡単な距離測定装置のような一次元の検出器であってもよいし、二次元の検出器として、又は三次元の検出器として具現化されてもよい。また、上述したように、あるいは以下にさらに詳細に説明するように、場景や環境を一次元的に走査することにより、三次元的な画像を生成することもできる。したがって、本発明による検出器は、具体的には、一次元検出器、二次元検出器、又は三次元検出器のいずれかであってよい。評価装置は、さらに、物体の少なくとも1つの横方向座標x,yを決定するように構成されてよい。評価装置は、縦方向座標と横方向座標の情報を組み合わせて、空間における物体の位置を決定するように適合されてよい。
一実施形態では、検出器は、各光センサが感光エリアを有する少なくとも2つの光センサを含んでよく、各感光エリアは幾何学的中心を有し、光センサの幾何学的中心は、異なる空間的オフセットによって検出器の光軸から離間されており、各光センサは、光受信ファイバを通過した光ビームによる各感光エリアの照射に応答して、センサ信号を生成するように構成されてよい。評価装置は、少なくとも2つのセンサ信号を結合することにより、物体の少なくとも1つの縦方向座標zを決定するように構成されてよい。
光センサの感光エリアは、物体から見えるように、重なっていてもよいし、重ならなくてもよく、すなわち、互いに重ならないように隣り合って配置されていてもよい。感光エリアは、互いに離間して配置されていてもよいし、直接隣接して配置されていてもよい。光センサは、1つかつ同一のビーム経路又は部分ビーム経路に配置されてよい。しかし、代替的に、光センサはまた、異なる部分ビーム経路に配置されてもよい。光センサが異なる部分ビーム経路に分散している場合、上記条件は、少なくとも1つの第1光センサが、第1空間的オフセットによって第1部分ビーム経路の光軸からオフセットされて、少なくとも1つの第1部分ビーム経路に配置され、少なくとも1つの第2光センサが、第2空間的オフセットによって第2部分ビーム経路の光軸からオフセットされて、少なくとも1つの第2部分ビーム経路に配置され、第1空間的オフセットと第2空間的オフセットとが異なるというように記載されてよい。
検出器は、2つ以上の光センサを含んでよい。いずれの場合でも、すなわち、正確に2つの光センサを含む検出器の場合、及び2つ以上の光センサを含む検出器の場合、光センサは、第1空間的オフセットだけ光軸から離間された少なくとも1つの第1光センサと、第2空間的オフセットだけ光軸から離間された少なくとも1つの第2光センサとを含んでよく、ここで、第1空間的オフセット及び第2空間的オフセットは異なる。第1光センサ及び第2光センサの他に、さらなる光センサが提供される場合、これらの追加の光センサもまた、条件を満たすか、又は代替的に、第1空間的オフセットだけ、第2空間的オフセットだけ、又は異なる空間的オフセットだけ光軸から離間されてよい。一例として、第1及び第2空間的オフセットは、少なくとも1.2倍、より好ましくは少なくとも1.5倍、より好ましくは少なくとも2倍異なってよい。上で概説したように、各感光エリアは幾何学的中心を有する。各感光エリアの各幾何学的中心は、検出器の光軸、例えば、ビーム経路の光軸、又は各光センサが配置されている各ビーム経路の光軸から離れていてよい。上で概説したように、光センサ及び/又は受信ファイバの入口面は、具体的には、光軸に垂直な平面であることが好ましい1つかつ同一の平面内に、配置されてよい。しかし、他の構成も可能である。したがって、光センサ及び/又は受信ファイバの入口面のうちの2つ以上は、光軸に平行な方向に離間されてよい。
例えば、光センサは、セグメント化されたダイオードの部分ダイオードであってもよく、該セグメント化されたダイオードの中心は検出器の光軸から中心ズレされている。光センサは、バイセルダイオード又は象限ダイオードの部分ダイオードであってもよく、及び/又は少なくとも1つのCMOSセンサを有してよい。本明細書で使用される場合、「部分ダイオード」という用語は、直列又は並列に接続された、いくつかのダイオードを含んでよい。この例は、かなり簡単であり、コスト効率的に実現可能である。したがって、一例として、バイセルダイオード又は象限ダイオードは、低コストで広く市販されており、これらのバイセルダイオード又は象限ダイオードの駆動スキームは一般に知られている。本明細書で使用される場合、「バイセルダイオード」という用語は、一般に、1つのパッケージ内に2つの部分ダイオードを有するダイオードを指す。バイセルダイオード及び象限ダイオードは、2つ又は4つの別々の感光エリア、特に2つ又は4つの活性エリアを有することができる。一例として、バイセルダイオードは、それぞれがダイオードの完全な機能を有する独立したダイオードを形成することができる。一例として、バイセルダイオードは各々、正方形又は長方形の形状を有してもよく、2つのダイオードは、2つの部分ダイオードが合計で長方形の形状を有する1×2又は2×1マトリックスを形成するように、1つの平面内に配置されてよい。しかしながら、本発明では、以下にさらに詳細に概説するように、バイセルダイオード及び象限ダイオードのセンサ信号を評価するための新しいスキームが提案される。しかし、一般的に、光センサは、具体的には、象限ダイオードの部分ダイオードであってもよく、象限ダイオードの中心は、転送装置の光軸から中心ズレされている。本明細書で使用される場合、「象限ダイオード」という用語は、一般的に、1つのパッケージ内に4つの部分ダイオードを有するダイオードを指す。一例として、4つの部分ダイオードは各々、ダイオードの全機能を有する独立したダイオードを形成することができる。一例として、4つの部分ダイオードは各々、正方形又は長方形の形状を有してもよく、4つの部分ダイオードは、4つの部分ダイオードが合計で長方形又は正方形の形状を有する2×2マトリックスを形成するように、1つの平面内に配置されてもよい。さらなる例では、4つの部分ダイオードは、合計で、円形又は楕円形の形状を有する2×2マトリックスを形成することができる。一例として、部分ダイオードは、互いに最小の間隔で隣接していてよい。
部分ダイオードの2×2マトリックスを有する象限ダイオードが使用される場合、象限ダイオードの中心は、具体的には光軸から中心ズレ又はオフセットされてよい。したがって、一例として、象限ダイオードの光センサの幾何学中心の交点であり得る象限ダイオードの中心は、少なくとも0.2mm、より好ましくは少なくとも0.5mm、より好ましくは少なくとも1.0mm、さらには2.0mmだけ光軸から中心ズレされてよい。同様に、複数の光センサを有する他のタイプの光センサ構成を使用する場合、光センサの全体的な中心は、光軸から同じ距離だけオフセットされ得る。
一般に、光センサの感光エリアは、任意の表面エリア又はサイズを有してよい。好ましくは、しかし、特にセンサ信号の簡単な評価の観点から、光センサの感光エリアは、実質的に等しいことが好ましく、例えば10%未満、好ましくは5%未満、又はさらに1%未満の許容範囲内が好ましい。これは、具体的には、典型的な市販の象限ダイオードの場合である。
典型的な構成においては、象限フォトダイオードのような市販の象限ダイオードが位置決めのために、すなわち象限フォトダイオードの平面内の光スポットの横方向座標を調整及び/又は測定するために使用される。したがって、一例として、象限フォトダイオードを用いたレーザビームの位置決めがよく知られている。しかしながら、典型的な先入観によれば、象限フォトダイオードは、xy位置決めにのみ使用される。この仮定によると、象限フォトダイオードは距離の測定には適していない。しかしながら、検出器の光軸に関して中心ズレされた象限フォトダイオードを使用する上述の知見は、以下のさらなる測定で示されるように、そうでないことを示している。したがって、上述したように、象限フォトダイオードでは、スポットの非対称性は、上述したオフセットのように、象限ダイオードをわずかに軸からずらすことによって測定することができる。それによって、単調なz依存関数が、例えば象限フォトダイオードの2つ以上の部分フォトダイオード、すなわち象限の2つ以上のセンサ信号の結合信号Qを形成することによって、生成され得る。そこでは、原則として、2つのフォトダイオードのみを、距離測定に用いてよい。他の2つのダイオードは、ノイズキャンセルのために、又はより正確な測定値を得るために使用されてよい。
象限ダイオード又は象限フォトダイオードを使用することに加えて、又はその代わりとして、他のタイプの光センサを使用することができる。したがって、例えば、スタガード光センサを使用することができる。
象限ダイオードの使用は、既知の光検出器に比べて多数の利点を提供する。このように、象限ダイオードは、LED又は活動的なターゲットと組み合わせて多数の用途に使用されており、スペクトル感度などの様々な光学特性と、様々なサイズで非常に低価格で、広く市販されている。市販の製品を本発明による検出器に実装することができるため、特別な製造方法を確立する必要はない。
以下でさらに詳細に概説するように、本発明による検出器を使用する距離測定は、1つ以上の追加の距離測定手段を検出器内に実装することにより、及び/又は検出器を他のタイプの距離測定手段と組み合わせることにより、強化することができる。したがって、一例として、検出器は、少なくとも1つの三角測量距離測定装置を備えてもよく、又はそれと組み合わせてもよい。このように、距離測定は、上述した測定原理と三角測量型の距離測定とを組み合わせることにより、精度を向上させることができる。さらに、x座標及び/又はy座標などの1つ以上の他の座標を測定するための手段が提供されてよい。象限ダイオードが使用される場合、象限ダイオードは追加の目的にも使用され得る。したがって、象限ダイオードは、オプトエレクトロニクス及びレーザ物理学の分野で一般的に知られているように、光スポットの従来のx−y測定にも使用することができる。したがって、一例として、レンズ又は検出器の位置を、象限ダイオードの従来のxy位置情報を使用して、距離測定のためのスポットの位置を最適化するように、調整することができる。実際的な例として、光スポットは、最初に、象限ダイオードの真ん中に配置することができ、これは通常、商関数Qを用いた上述の距離測定では許されない。このように、第1に、従来の象限フォトダイオード技術が、例えば象限ダイオード上のスポット位置が測定に最適であるように、象限フォトダイオード上の光スポットの位置を中心ズレするために使用され得る。したがって、一例として、検出器の光センサの異なる中心ズレは、光スポットが光軸に関して及び光センサのアレイの幾何学的中心に関して中心ズレされるように、単に光スポットの光軸に関しての動きの出発点であり得る。
したがって、一般に、検出器の光センサは、センサアレイを形成してもよく、又は上述の象限ダイオードのように、センサアレイの一部であってもよい。したがって、一例として、検出器は、例えば、m行及びn列を有し、m、nが独立して正の整数である、長方形アレイなどの光センサのアレイを備えてよい。好ましくは、1つ超の列及び1つ超の行が与えられる、すなわち、n>1、m>1である。したがって、一例として、nは2〜16以上であり得、mは2〜16以上であり得る。好ましくは、行数と列数との比は1に近い。一例として、例えばm/n=1:1、4:3、16:9、又は同様のものを選択することによって、例えば0.3≦m/n≦3となるように、n及びmを選択することができる。一例として、アレイは、m=2、n=2又はm=3、n=3などを選択することなどにより、等しい数の行及び列を有する正方形のアレイであってよい。m=2、n=2の場合は、象限ダイオード又は象限光センサの場合であり、それは、象限フォトダイオードが広く利用可能であるため、実用上の理由から、好ましい場合の1つである。
出発点として、アレイ内の光受信ファイバの入口面の幾何学中心は、特定のオフセットなどによって、光軸から中心ズレされてもよい。光受信ファイバの入口面は、具体的には、例えば勾配に沿って、好ましくは自動的に、例えば光軸に垂直な平面内で光受信ファイバの入口面を動かすことによって、及び/又は、例えば、光軸を平行にシフトさせたり、及び/又は光軸を傾けたりして光軸自体を動かすことによって、光軸に対して移動可能であり得る。したがって、光受信ファイバの入口面の平面内で光ビームによって生成される光スポットの位置を調整するために、光受信ファイバの入口面はシフトさせることができる。追加的に又は代替的に、光軸は、適切な要素を使用することによって、例えば1つ以上の偏向要素及び/又は1つ以上のレンズを使用することにより、シフト及び/又は傾斜させることができる。一例として、移動は、光軸を平行シフト移動させること及び/又は光軸を傾けることなど、光軸を動かすために、例えば光受信ファイバの入口面を移動及び/又はシフトする、及び/又は、ビーム経路内の1つ以上の光学要素を移動及び/又はシフト及び/又は傾けるなど、1つ以上のピエゾアクチュエータ及び/又は1つ以上の電磁アクチュエータ及び/又は1つ以上の空気圧式又は機械式アクチュエータなどの1つ以上の適切なアクチュエータを使用することによって行われ得る。評価装置は、具体的には、光軸に対するセンサアレイの相対位置を、例えば光軸に垂直な平面内で制御するように調整することができる。調整手順は、評価装置が、第1に、センサ信号を使用することによって、光受信ファイバの入口面上の光ビームによって生成された光スポットの少なくとも1つの横方向位置を決定するように、第2に、光受信ファイバの入口面及び/又は光軸を移動することによってなど、例えば光スポットが中心ズレするまで平面内の光受信ファイバの入口面を光軸に移動させることによって、及び/又は、光スポットが中心ズレするまでレンズを傾けることによって、光軸に対してアレイを動かすように構成される場合に実行され得る。本明細書で使用される場合、横方向位置は、x−y平面とも呼ばれ得る光軸に垂直な平面内の位置とすることができる。横方向座標の測定のために、一例として、光センサのセンサ信号が比較されてもよい。一例として、センサ信号が等しいことが判明した場合、したがって、光スポットが象限ダイオードの中心など、光センサに関して対称的に配置されていると判断された場合、光受信ファイバの入口面内の光スポットを中心ズレさせるために、光受信ファイバの入口面のシフト及び/又はレンズの傾斜が行われ得る。したがって、光軸から光受信ファイバの入口面の中心を中心ズレさせることによってなど、光軸からの光受信ファイバの入口面の中心ズレは、光スポットが光軸上に位置し、したがって中心に位置する典型的な状況を回避するための単なる出発点であり得る。したがって、光軸に対してアレイを中心ズレさせることによって、光スポットを中心ズレさせる必要がある。光スポットが偶然に光受信ファイバの入口面の中心に位置し、全ての光受信ファイバの入口面を等しく照射するなどのように、光スポットの中心ズレが真でない場合は、光受信ファイバの入口面上の光スポットを中心ズレさせるために、光軸に対するアレイの上述のシフトが行われ、好ましくは自動的に行われてもよい。それによって、信頼性のある距離測定が行われ得る。さらに、移動可能な光源を備えた走査システムでは、象限ダイオード上の光スポットの位置は固定されていない可能性がある。これはまだ可能であるが、ダイオード内のスポットのxy位置に応じて、異なる較正が使用されることが必要となる場合がある。
上述したように、具体的には、象限フォトダイオードが使用され得る。一例として、4つの光センサを提供するために、紫外スペクトル範囲から近赤外スペクトル範囲において感度ある、タイプS4349の象限Si PINフォトダイオードなど、Hamamatsu Photonics Deutschland GmbH、D−82211 Herrsching am Ammersee,Germanyから入手可能な1つ以上の象限フォトダイオードなど、市販の象限フォトダイオードを組み込むことができる。光センサのアレイが使用される場合、アレイは裸チップであってもよく、又はTO−5金属パッケージ内に封入されたような封入アレイであってもよい。追加的に又は代替的に、例えばTT Electronics plc,Fourth Floor,St Andrews House,West Street Woking Surrey, GU21 6EB,Englandから入手可能なTT Electronics OPR5911などの表面実装装置を使用することができる。他の光センサも使用できることに留意されたい。
さらに、正確に1つの象限フォトダイオードが使用される選択肢に加えて、2つ以上の象限フォトダイオードも使用され得ることに留意されたい。したがって、一例として、2つ以上の光センサを提供することによって、第1象限フォトダイオードを上述のように距離測定に使用することができる。他の象限フォトダイオードが、例えば、少なくとも1つの横方向座標x及び/又はyを使用するためなどの横方向位置測定のために、第1象限フォトダイオードのビーム経路から分割された第2部分ビーム経路内で使用されることができる。第2象限フォトダイオードは、一例として、光軸に対して軸上に配置されてもよい。
さらに、1つ以上の象限フォトダイオードを使用するという選択肢に加えて、好ましくは2×2マトリックスのような長方形マトリックスなどの対称形状に互いに近接して配置又は組み立てられる別個のフォトダイオードによって、1つ以上の象限フォトダイオード、又は追加のフォトダイオードアレイが置換又は模倣され得ることに留意されたい。しかしながら、さらなる配置が可能である。そのような配置又は組み立てにおいては、フォトダイオードは、全てのフォトダイオードが単一のハウジング又はマウント内にある、又は、フォトダイオードのグループが単一のハウジング又はマウント内にあるというように、1つのハウジング又はマウント内に配置又は組み立てられてよく、又は、フォトダイオードのそれぞれが別のハウジング又はマウントに配置又は組み立てられてよい。さらに、フォトダイオードは回路基板上に直接組み立てられてよい。このような配置又は組み立てでは、フォトダイオードは、フォトダイオードの活性エリア間の間隔が、1センチメートル未満、好ましくは1ミリメートル未満、より好ましくはできるだけ小さい分離値を有するように配置されることができる。さらに、測定を悪化させる可能性がある光反射、歪みなどを回避するために、活性エリアの間の空間は、空であるか、又は材料、好ましくは例えばブラックシリコン、ブラックポリオキシメチレンなどのブラックポリマーなどの光吸収材料、より好ましくは、ブラックセラミック、又はブラックシリコンなどの絶縁性ブラックポリマーなどの光吸収性及び電気絶縁性材料で満たされ得る。さらに、フォトダイオード間隔の分離値は、プラスチックセパレータのようなフォトダイオード間に別個のビルディングブロックを追加することによっても実現することができる。さらなる実施形態が可能である。活性エリア間の最小距離を有する2×2の長方形マトリックスなどの、同様の構成に配置された単一ダイオードによる象限フォトダイオードの置換は、光検出器のコストをさらに最小限に抑えることができる。さらに、象限ダイオードからの2つ以上のダイオードを並列又は直列に接続して単一の感光エリアを形成することができる。
光センサは、それぞれ、独立して、不透明、透明又は半透明であってよい。しかし、簡単のために、これらの不透明センサが一般に広く市販されているため、光ビームに対して透明でない不透明センサを使用することができる。
物体の少なくとも1つの縦方向座標の決定を含む上述した操作は、少なくとも1つの評価装置によって実行されてよい。したがって、一例として、上記の関係のうちの1つ以上が、1つ以上のルックアップテーブルを実装することによるなど、ソフトウェア及び/又はハードウェアに実装されてよい。したがって、一例として、評価装置は、物体の少なくとも1つの縦方向座標を決定するために、1つ以上のコンピュータ、特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)、又は上述の評価を実行するように構成されたデジタル信号プロセッサ(DSP)などの、1つ以上のプログラム可能な装置を備えてよい。追加的又は代替的に、しかしながら、評価装置は、ハードウェアによって完全に又は部分的に具現化されてもよい。
検出器は、単一の光ビーム、又は複数の光ビームを評価するように構成されてよい。複数の光ビームが物体から検出器に伝播する場合、光ビームを区別するための手段が設けられ得る。したがって、光ビームが異なるスペクトル特性を有し、検出器が、異なる光ビームを区別するための1つ以上の波長選択要素を含んでよい。光ビームの各々は、したがって独立に評価されてよい。波長選択要素は、一例として、1つ以上のフィルタ、1つ以上のプリズム、1つ以上のグレーティング、1つ以上の二色性ミラー、又はそれらの任意の組み合わせであってもよいし、それらを含んでもよい。さらに、追加的に又は代替的に、2つ以上の光ビームを区別するために、光ビームは、特定の方法で変調されてもよい。したがって、一例として、光ビームは周波数変調されてもよく、センサ信号は、それらの復調周波数に従って、異なる光ビームから発生するセンサ信号を部分的に区別するために復調されてもよい。これらの技術は、一般に、高周波エレクトロニクスの分野の当業者に知られている。一般に、評価装置は、異なる変調を有する異なる光ビームを区別するように構成されてよい。
上述したように、検出器は、さらに、1つ以上の追加の光学要素などの、1つ以上の追加の要素を含み得る。さらに、検出器は、完全に又は部分的に、少なくとも1つのハウジングに一体化されてよい。
キットは、少なくとも1つの光ビームを検出器に向けるように適合された少なくとも1つのビーコン装置をさらに含み、ビーコン装置は、物体に取り付け可能であり、物体によって保持可能であり、及び物体に一体化可能であるうちの少なくとも1つである。少なくとも1つのビーコン装置は、レーザ、LED、電球など、1つ以上の光源など、1つ以上の照射源を含む、少なくとも1つの能動型ビーコン装置であり得るか、又はそれを含み得る。一例として、照射源によって放出される光は、300〜1000nm、特に500〜1000nmの波長を有し得る。あるいは、上記で概説したように、赤外スペクトル範囲、例えば780nm〜3.0μmの範囲が使用され得る。具体的には、シリコンフォトダイオードが特に700nm〜1000nmの範囲で適用可能な近赤外領域が使用され得る。2つ以上の光ビームを区別するために、1つ以上のビーコン装置によって放出される光は、上記で概説したように、非変調であっても、変調されてもよい。追加的に又は代替的に、少なくとも1つのビーコン装置は、1つ以上の反射要素を備えることなどによって、1つ以上の光ビームを検出器に向けて反射するように適合され得る。さらに、少なくとも1つのビーコン装置は、光ビームを散乱させるように適合された1つ以上の散乱要素であってもよく、又はそれを含んでもよい。そこでは、弾性又は非弾性散乱を使用することができる。少なくとも1つのビーコン装置が一次光ビームを検出器に向けて反射及び/又は散乱するように適合されている場合、ビーコン装置は、光ビームのスペクトル特性に影響を与与えないようにするように適合されてよく、あるいは、光ビームの波長を変更するなどして、光ビームのスペクトル特性を変更するように適合されてよい。
さらなる態様において、本発明は、上記に開示された、又は以下でさらに詳細に開示される検出器を参照する実施形態のうちの1つ以上によるように、本発明によるキットを使用することにより、少なくとも1つの物体の位置を決定する方法を開示している。それでも、他のタイプのキットを使用してもよい。本発明の方法は、以下の方法ステップを含み、該方法ステップは、所定の順序で実行されてもよいし、異なる順序で実行されてもよい。さらに、記載されていない1つ以上の追加の方法ステップが存在してもよい。さらに、1つ、複数、又は全ての方法ステップが繰り返し実行されてもよい。
本方法は、以下のステップ、
i) 少なくとも1つの測定ヘッドを提供するステップであって、該測定ヘッドが、
− 少なくとも1つの転送装置であって、物体から測定ヘッドに伝播する少なくとも1つの入射光ビームに対応して少なくとも1つの焦点距離を有する、少なくとも1つ転送装置と;
− 少なくとも2つの光受信ファイバであって、前記光受信ファイバの少なくとも1つ及び/又は前記転送装置は、εr/k≧0.362(m・K)/Wの比εr/kを有し、式中、kは熱伝導率であり、εrは比誘電率である、少なくとも2つの光受信ファイバと、
を有する、ステップ;
ii) 少なくとも1つの検出器を提供するステップであって、前記検出器は、少なくとも2つの光センサを含み、各光センサは、少なくとも1つの感光エリアを有し、前記測定ヘッドの光受信ファイバの少なくとも1つを通過した光ビームによる前記感光エリアの照射に応答して、少なくとも1つのセンサ信号を生成するように設計されている、ステップ;
iii) 光受信ファイバの少なくとも1つを通過した少なくとも1つの光ビームによって、検出器の少なくとも2つの光センサの各感光エリアを照射するステップであって、それにより、各感光エリアは、少なくとも1つのセンサ信号を生成する、ステップ;及び
iv) センサ信号を評価し、それによって物体の少なくとも1つの縦方向座標zを決定するステップであって、前記評価はセンサ信号の結合信号Qを導出する、ステップ
を含む。
具体的には、第1及び第2センサ信号を評価することは、第1及び第2センサ信号を除算することにより、又は第1及び第2センサ信号の倍数を除算することにより、又は第1及び第2センサ信号の線形結合を除算することにより、結合信号Qを導出することを含み得る。さらに、縦方向座標の決定は、結合信号Qを評価することを含み得る。詳細、選択肢、及び定義については、上記した検出器を参照することができる。したがって、具体的には、上で概説したように、本方法は、例えば、上記で与えられた、又は以下でさらに詳細に与えられる1つ以上の実施形態による検出器など、本発明による検出器を使用することを含むことができる。
本発明のさらなる態様において、上記で与えられた、又は以下でさらに詳細に与えられる1つ以上の実施形態によるキットなど、本発明によるキットの使用が、交通技術における位置測定;娯楽用途;光データ保存用途;セキュリティ用途;監視用途;安全用途;ヒューマンマシーンインターフェイス用途;追跡用途;写真用途;画像化又はカメラ用途;産業用センシング用途;医療用途;3D印刷用途;少なくとも1つの空間マップを生成するためのマッピング用途;車両用のホーミング又は追跡ビーコン検出器;マシーンビジョン用途;ロボット用途;品質管理用途;製造用途、からなる群から選択される使用目的のために提案される。
本出願による測定ヘッド及びキットのさらなる用途については、WO2018/091640A1を参照し、その内容は参照により本明細書に含まれる。
全体的に、本発明の文脈では、以下の実施形態が好ましいと考えられる。
実施形態1:少なくとも1つの物体の位置を決定するための測定ヘッドであって、
― 前記少なくとも1つの転送装置であって、前記物体から前記測定ヘッドに伝播する前記少なくとも1つの入射光ビームに対応する少なくとも1つの焦点距離を有する、少なくとも1つの転送装置と、
― 少なくとも2つの光受信ファイバであって、前記光受信ファイバの少なくとも1つ及び/又は前記転送装置は、εr/k≧0.362(m・K)/Wの比εr/kを有し、ここで、kは熱伝導率であり、εrは比誘電率である、少なくとも2つの光受信ファイバ(116)と、を有する測定ヘッド。
実施形態2:前記光受信ファイバの少なくとも1つ及び/又は前記転送装置は、εr/k≧0.743(m・K)/Wの比εr/kを有し、好ましくは比εr/kはεr/k≧1.133(m・K)/Wである、先行する実施形態による測定ヘッド。
実施形態3:前記比εr/kは0.362(m・K)/W≦εr/k≦1854(m・K)/Wの範囲にあり、式中kは熱伝導率、εrは比誘電率である、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態4:前記比εr/kは、0.743(m・K)/W≦εr/k≦194(m・K)/Wの範囲にあり、好ましくは、比εr/kは、1.133(m・K)/W≦εr/k≦88.7(m・K)/Wの範囲にある、先行する実施形態による測定ヘッド。
実施形態5:前記転送装置は、9.05≦νe/nD≦77.3の範囲の比νe/nDを有し、式中νeはアッベ数、nDは屈折率であり、前記アッベ数νeは以下の数式8で与えられる。
ここで、niは異なる波長に対する屈折率であり、nCは656nmの場合の屈折率、nDは589nmの場合の屈折率、及びnFは、486nmの場合の屈折率である、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態6:前記比νe/nDは、13.9≦νe/nD≦44.7の範囲であり、より好ましくは、15.8≦νe/nD≦40.1の範囲である、先行する実施形態による測定ヘッド。
実施形態7:前記光受信ファイバの各々が、少なくとも1つのクラッドと少なくとも1つのコアを含む、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態8:積αΔnは、視覚及び近赤外波長範囲の少なくとも1つの波長、好ましくは656nm、589nm、又は486nmから選択される少なくとも1つの波長において、αΔn≦110dB/kmであり、式中αは減衰係数であり、ΔnはΔn=(n1 2−n2 2)/(2n1 2)の屈折率コントラストであり、n1は最大コア屈折率であり、n2はクラッド屈折率である、先行する実施形態による測定ヘッド。
実施形態9:前記積αΔnはαΔn≦23dB/km、好ましくはαΔn≦11.26dB/kmである、先行する実施形態による測定ヘッド。
実施形態10:前記積αΔnは、視覚及び近赤外波長範囲の少なくとも1つの波長、好ましくは656nm、589nm、又は486nmから選択される少なくとも1つの波長において、0.0004dB/km≦αΔn≦110dB/kmの範囲にあり、式中、αは減衰係数であり、ΔnはΔn=(n1 2−n2 2)/(2n1 2)の屈折率コントラストであり、n1は最大コア屈折率であり、n2はクラッド屈折率である、先行する3つの実施形態のいずれか1つによる測定ヘッド。
実施形態11:前記積αΔnは0.002dB/km≦αΔn≦23dB/kmの範囲であり、好ましくは0.02dB/km≦αΔn≦11.26dB/kmの範囲である、先行する実施形態による測定ヘッド。
実施形態12:前記転送装置は、開口面積D1を有し、前記光受信ファイバの少なくとも1つは、断面積D2を有するファイバコアを有し、比D1/D2は、0.54≦D1/D2≦5087の範囲、好ましくは1.27≦D1/D2≦413の範囲、より好ましくは2.17≦D1/D2≦59.2の範囲にある、先行する3つの実施形態のいずれか1つによる測定ヘッド。
実施形態13:前記測定ヘッドは、少なくとも1つのスペーサ装置を含み、前記スペーサ装置は、少なくとも1つの転送装置と光受信ファイバの少なくとも1つとを接続するように構成されている、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態14:前記スペーサ装置は、中実容積Vsと中空容積Vhを含み、前記中実容積と前記中空容積の比Vs/Vhは、0.013≦Vs/Vh≦547の範囲、好ましくは0.047≦Vs/Vh≦87.6の範囲、より好ましくは0.171≦Vs/Vh≦26.2の範囲にある、先行する実施形態による測定ヘッド。
実施形態15:前記測定ヘッドは、物体を照射するための照射源をさらに含む、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態16:前記照射源は、1.5・10−7mm2・sr≦G≦314mm2・srの範囲、好ましくは、1・10−5mm2・sr≦G≦22mm2・srの範囲、より好ましくは、3・10−4mm2・sr≦G≦3.3mm2・srの範囲の幾何学的広がりGを有する、先行する実施形態による測定ヘッド。
実施形態17.前記照射源の幾何学的広がりGは、
G=A・Ω・n2
によって定義されることができ、式中、Aは、A=AOF=π・r2 OFを有する面積であり、Ωは、光によって規定される投影立体角であり、nは媒体の屈折率であり、半開口角θを有する回転対称光学系の場合、幾何学的広がりは下式によって与えられ、
G=π・A・sin2(θ)n2
光ファイバの場合、発散角はθmax=arcsin(NA/n)で得られ、式中、NAは、光ファイバの最大開口数であり、半開口角θ及び/又は発散角θmaxは小さく、前記半開口角θは、0.01°≦θ≦42°の範囲;好ましくは0.1°≦θ≦21°の範囲;より好ましくは、0.15°≦θ≦13°の範囲であり、及び/又は、発散角θmaxが0.01°≦θmax≦42°の範囲;好ましくは0.1°≦θmax≦21°の範囲;より好ましくは0.15°≦θmax≦13°の範囲にあり、面積Aは10mm2より小さく、好ましくは3mm2より小さく、より好ましくは1mm2より小さい、先行する実施形態による測定ヘッド。
実施形態18:前記各光受信ファイバは、少なくとも1つのファイバクラッドと少なくとも1つのコアを含み、比d1/BLは、0.0011≦d1/BL≦513の範囲にあり、式中、d1はコアの直径であり、BLはベースラインである、先行する2つの実施形態のいずれか1つによる測定ヘッド。
実施形態19:前記比d1/BLは、0.0129≦d1/BL≦28の範囲、好ましくは、0.185≦d1/BL≦7.1の範囲にある、先行する実施形態による測定ヘッド。
実施形態20:前記光受信ファイバの各々は、少なくとも1つの入口面を有し、それぞれの入口面の幾何学的中心は、前記転送装置の光軸に対して垂直に整合されている、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態21:前記光受信ファイバの少なくとも1つは、形状化及び/又は構造化された入口面及び/又は出口面を有する構造化ファイバである、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態22:前記転送装置は、具体的には:少なくとも1つのレンズ、例えば、少なくとも1つの焦点調節可能レンズ、少なくとも1つの非球面レンズ、少なくとも1つの球面レンズ、少なくとも1つのフレネルレンズからなる群から選択される少なくとも1つのレンズ;少なくとも1つの回折光学要素;少なくとも1つの凹面鏡;少なくとも1つのビーム偏向要素、好ましくは少なくとも1つのミラー;少なくとも1つのビーム分割要素、好ましくはビーム分割キューブ又はビーム分割ミラーのうちの少なくとも1つ;少なくとも1つのマルチレンズシステム;少なくとも1つの勾配指数(GRIN)レンズ、のうちの1つ又は複数を含む、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態23:前記測定ヘッドは、関心領域を走査するために測定ヘッドを移動させるように構成された少なくとも1つのアクチュエータを含む、先行する実施形態のいずれか1つによる測定ヘッド。
実施形態24:前記アクチュエータは、少なくとも1つの電気機械アクチュエータ及び/又は少なくとも1つの圧電アクチュエータを含み、前記圧電アクチュエータは、少なくとも1つの圧電セラミックアクチュエータ;少なくとも1つの圧電アクチュエータからなる群から選択される少なくとも1つのアクチュエータを含む、先行する実施形態による測定ヘッド。
実施形態25:前記アクチュエータは、前記測定ヘッドの光照射ファイバ及び/又は光受信ファイバを動かすように構成される、先行する2つの実施形態のいずれか1つによる測定ヘッド。
実施形態26:前記アクチュエータは、前記光照射ファイバ及び/又は前記測定ヘッドの一方又は両方を、線形走査及び/又はラジアル走査及び/又はスパイラル走査で移動させるように適合される、先行する実施形態による測定ヘッド。
実施形態27:先行する実施形態のいずれか1つによる、少なくとも1つの測定ヘッド及び少なくとも1つの物体の位置を決定するための検出器を含むキットであって、前記検出器が、
− 少なくとも2つの光センサであって、各光センサは、前記測定ヘッドの光受信ファイバの少なくとも1つを通過した光ビームによる各感光エリアの照射に応答して、少なくとも1つのセンサ信号を生成するように設計されている、少なくとも2つの光センサと;
− 前記センサ信号からの結合信号Qを評価することにより、前記物体の少なくとも1つの縦方向座標zを決定するように構成されている、少なくとも1つの評価装置と、
を含むキット。
実施形態28:前記評価装置は、前記センサ信号を徐算すること、前記センサ信号の倍数を徐算すること、前記センサ信号の線形結合を徐算することのうちの1つ以上によって、結合信号Qを導出するように構成される、先行する実施形態によるキット。
実施形態29:前記評価装置は、結合信号Qと縦方向座標との間の少なくとも1つの所定の関係を用いて縦方向座標を決定するように構成されている、先行する実施形態によるキット。
実施形態30:前記評価装置は、以下の数式9によって結合信号Qを導出するように構成されている。
ここで、式中、x及びyは横方向座標、A1及びA2は光ファイバを通過した光ビームの光センサの位置におけるビームプロファイルの面積、E(x、y、zo)は物体距離zoで与えられるビームプロファイルを表す、先行する実施形態のいずれか1つによるキット。
実施形態31:前記センサ信号の各々は、光ビームのビームプロファイルの少なくとも1つの領域の少なくとも1つの情報を含み、前記ビームプロファイルは、台形ビームプロファイル;三角形ビームプロファイル;円錐ビームプロファイル及びガウスビームプロファイルの線形結合からなる群から選択される、先行する実施形態のいずれか1つによるキット。
実施形態32:前記感光エリアは、第1センサ信号がビームプロファイルの第1領域の情報を含み、第2センサ信号がビームプロファイルの第2領域の情報を含むように配置されており、前記ビームプロファイルの第1領域と前記ビームプロファイルの第2領域は、隣接する領域又は重複する領域のいずれか一方又は両方であり、前記評価装置は、前記ビームプロファイルの第1領域及び前記ビームプロファイルの第2領域を決定するように構成されており、前記ビームプロファイルの第1領域は、ビームプロファイルの実質的にエッジ情報を含んでおり、前記ビームプロファイルの第2領域は、ビームプロファイルの実質的に中心情報を含んでおり、前記エッジ情報は、前記ビームプロファイルの第1領域の光子数に関する情報を含み、前記中心情報は、前記ビームプロファイルの第2領域の光子数に関する情報を含み、前記評価装置は、前記エッジ情報と前記中心情報を除算すること、前記エッジ情報と前記中心情報の倍数を除算すること、前記エッジ情報と前記中心情報の線形結合を除算することのうちの1つ以上によって、結合信号Qを導出するように構成されている、先行する実施形態によるキット。
実施形態33:前記光センサは、バイセルダイオード又は象限ダイオードの部分ダイオードであり、及び/又は少なくとも1つのCMOSセンサを含む、キットを参照する先行する実施形態のいずれか1つによるキット。
実施形態34:キットを参照する先行する実施形態のいずれか1つによるキットを使用することによって少なくとも1つの物体の位置を決定する方法であって、前記方法は、以下のステップ、
i) 少なくとも1つの測定ヘッドを提供するステップであって、該測定ヘッドが、
− 少なくとも1つ転送装置であって、物体から測定ヘッドに伝播する少なくとも1つの入射光ビームに対応して少なくとも1つの焦点距離を有する、少なくとも1つ転送装置と、
− 少なくとも2つの光受信ファイバであって、前記光受信ファイバの少なくとも1つ及び/又は前記転送装置は、εr/k≧0.362(m・K)/Wの比εr/kを有し、式中、kは熱伝導率であり、εrは比誘電率である、少なくとも2つの光受信ファイバと、
を有する、ステップ、
ii) 少なくとも1つの検出器を提供するステップであって、前記検出器は、少なくとも2つの光センサを含み、各光センサは、少なくとも1つの感光エリアを有し、前記測定ヘッドの光受信ファイバの少なくとも1つを通過した光ビームによる前記感光エリアの照射に応答して、少なくとも1つのセンサ信号を生成するように設計されている、ステップ、
iii) 光受信ファイバの少なくとも1つを通過した少なくとも1つの光ビームによって、検出器の少なくとも2つの光センサの各感光エリアを照射するステップであって、それにより、各感光エリアは、少なくとも1つのセンサ信号を生成する、ステップ;及び
iv) センサ信号を評価し、それによって物体の少なくとも1つの縦方向座標zを決定するステップであって、前記評価はセンサ信号の結合信号Qを導出することを含む、ステップ
を含む、方法。
実施形態35:測定ヘッドに関連する先行する実施形態のいずれか1つによる測定ヘッドの使用であって、使用目的が:交通技術における位置測定;娯楽用途;光データ保存用途;セキュリティ用途;監視用途;安全用途;ヒューマンマシーンインターフェイス用途;物流用途;内視鏡検査用途;医療用途;追跡用途;写真用途;マシーンビジョン用途;ロボット用途;品質管理用途;3D印刷用途;拡張現実用途;製造用途;光学的データ保存及び読み出しを組み合わせた使用、からなる群から選択される、測定ヘッドの使用。