KR20200083783A - 승강기의 로프장력과 견인력 측정장치 및 방법 - Google Patents
승강기의 로프장력과 견인력 측정장치 및 방법 Download PDFInfo
- Publication number
- KR20200083783A KR20200083783A KR1020180172590A KR20180172590A KR20200083783A KR 20200083783 A KR20200083783 A KR 20200083783A KR 1020180172590 A KR1020180172590 A KR 1020180172590A KR 20180172590 A KR20180172590 A KR 20180172590A KR 20200083783 A KR20200083783 A KR 20200083783A
- Authority
- KR
- South Korea
- Prior art keywords
- rope
- measuring
- elevator
- tension
- rope tension
- Prior art date
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/04—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring tension in flexible members, e.g. ropes, cables, wires, threads, belts or bands
- G01L5/10—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring tension in flexible members, e.g. ropes, cables, wires, threads, belts or bands using electrical means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B7/00—Other common features of elevators
- B66B7/12—Checking, lubricating, or cleaning means for ropes, cables or guides
- B66B7/1207—Checking means
- B66B7/1215—Checking means specially adapted for ropes or cables
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C17/00—Arrangements for transmitting signals characterised by the use of a wireless electrical link
- G08C17/02—Arrangements for transmitting signals characterised by the use of a wireless electrical link using a radio link
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Abstract
본 발명은 장치 자체의 구성이 컴팩트하여 설치상의 편리함을 제공함과 동시에 승강기를 하강시키는 방법으로 측정이 가능한 승강기의 로프장력과 견인력 측정장치 및 방법에 관한 것이다.
본 발명에 따르면, 승강기(10)의 승강카(11)를 매단 상태로 연장되는 복수의 로프(12) 상에 설치되는 측정본체(33)와, 상기 측정본체(33)의 일면에 돌출되게 구비되어 상기 로프(12)의 길이방향을 따라 3점 지지되도록 로프(12) 상에 지그재그 형태로 끼워지는 복수의 지지롤러(34)와, 상기 지지롤러(34) 중의 하나에 연결되어 로프(12)의 장력을 감지하도록 된 로드셀(35)로 구성된 측정수단(31,32)과; 상기 측정수단(31,32)에 연결되어 상기 로드셀(35)에 의해 측정된 데이터값에 의해 로프장력과 견인력을 계산 및 표시하도록 된 단말수단(40)을 포함한 승강기의 로프장력과 견인력 측정장치 및 방법이 제공된다.
본 발명에 따르면, 승강기(10)의 승강카(11)를 매단 상태로 연장되는 복수의 로프(12) 상에 설치되는 측정본체(33)와, 상기 측정본체(33)의 일면에 돌출되게 구비되어 상기 로프(12)의 길이방향을 따라 3점 지지되도록 로프(12) 상에 지그재그 형태로 끼워지는 복수의 지지롤러(34)와, 상기 지지롤러(34) 중의 하나에 연결되어 로프(12)의 장력을 감지하도록 된 로드셀(35)로 구성된 측정수단(31,32)과; 상기 측정수단(31,32)에 연결되어 상기 로드셀(35)에 의해 측정된 데이터값에 의해 로프장력과 견인력을 계산 및 표시하도록 된 단말수단(40)을 포함한 승강기의 로프장력과 견인력 측정장치 및 방법이 제공된다.
Description
본 발명은 승강기의 로프장력과 견인력 측정장치 및 방법에 관한 것으로, 보다 상세하게는 장치 자체의 구성이 컴팩트하여 설치상의 편리함을 제공함과 동시에 승강기를 하강시키는 방법으로 측정이 가능한 승강기의 로프장력과 견인력 측정장치 및 방법에 관한 것이다.
일반적으로 승강기는 건물의 상하로 승강되어 승객을 원하는 층으로 이동시키도록 된 장치로, 대개 사람이 탑승할 수 있도록 된 승강카를 로프의 일단에 연결한 상태에서 권상수단에 의해 승강시키게 되고, 상기 로프의 타단에는 상기 승강카의 하중을 보상하기 위한 밸런스 웨이트가 결합된 것이다.
이러한 승강기는 장시간 사용하게 되면 로프의 노후화나 로프를 걸도록 된 풀리의 마모 등으로 인한 안전상의 문제가 발생되는 것을 미연에 방지하도록 주기적으로 또는 필요에 따라 안전검사를 실시하고, 검사결과에 따라서는 로프나 풀리의 교체 등과 같은 유지보수 작업을 행하게 되는데, 통상적인 안전검사는 로프장력을 측정하거나 로프에 의한 승강카의 견인력을 측정하여 안전여부를 판단하는 것으로, 이러한 로프장력이나 견인력의 측정은 승강카에 의한 탑승하는 인원수에 의한 최대적재하중을 파악하는 중요한 데이터로 활용되는 것이다.
종래의 로프장력과 견인력을 측정하는 장치는 대개 로드셀이 장착되는 측정수단을 로프에 그립한 상태로 볼트 등에 의해 나사체결하는 구조로 이루어져 로드셀을 결합하는 작업 자체가 매우 번거로울 뿐만 아니라 그에 따른 장치의 구성 자체가 복잡하여 제작이나 설치 등의 번거로움이 따를 수 있는 것이다.
또한 종래에는 로프장력이나 견인력을 측정할 때에 권상수단에 의해 로프를 당겨 승강카를 끌어 올리는 힘을 측정하는 것으로, 이러한 승강카 상승견인식 측정방법은 견인력을 계산할 때에 승강카의 자중값이 필요하므로, 사전에 승강카의 자중에 대한 정보를 가지고 있는 경우에는 상관이 없으나, 실질적으로 현장에서는 승강카의 자중을 모르는 상태로 측정이 진행되는 경우가 빈번하여 검사의 정확도를 확보하는 데에 어려움이 있는 것이다.
본 발명은 전술한 바와 같은 문제점을 해결하기 위한 것으로, 본 발명은 장치 자체의 구성이 컴팩트하여 설치상의 편리함을 제공함과 동시에 복수의 로프 상에 장치를 설치하여 비교 측정함에 따른 측정 오차를 줄일 수 있으며, 승강기를 하강시키는 방법으로 측정이 이루어짐과 동시에 승강카의 자중을 모르는 상태에서도 측정이 가능하여 측정상의 편리함과 정확성을 확보할 수 있도록 된 승강기의 로프장력과 견인력 측정장치 및 방법을 제공하는 것이다.
본 발명의 특징에 따르면, 승강기(10)의 승강카(11)를 매단 상태로 연장되는 복수의 로프(12) 상에 설치되는 측정본체(33)와, 상기 측정본체(33)의 일면에 돌출되게 구비되어 상기 로프(12)의 길이방향을 따라 3점 지지되도록 로프(12) 상에 지그재그 형태로 끼워지는 복수의 지지롤러(34)와, 상기 지지롤러(34) 중의 하나에 연결되어 로프(12)의 장력을 감지하도록 된 로드셀(35)로 구성된 측정수단(31,32)과;
상기 측정수단(31,32)에 연결되어 상기 로드셀(35)에 의해 측정된 데이터값에 의해 로프장력과 견인력을 계산 및 표시하도록 된 단말수단(40)을 포함하며;
상기 측정수단(31,32)은 상기 로프(12) 중에서 하나의 로프(12)에 장착되는 제1 측정수단(31)과, 상기 제1 측정수단(31)과는 다른 로프(12) 상에 장착되는 제2 측정수단(32)으로 구성되고;
상기 단말수단(40)은 상기 제1 측정수단(31)과 제2 측정수단(32)에 의한 측정값을 평균값으로 환산하여 로프장력과 견인력을 계산하도록 된 것을 특징으로 하는 승강기의 로프장력과 견인력 측정장치가 제공된다.
본 발명의 다른 특징에 따르면, 상기 측정수단(31,32)과 단말수단(40) 사이에는 상기 측정수단(31,32)에 의해 측정된 데이터를 단말수단(40) 측으로 전달하기 위한 인터페이스수단(50)이 개재되며;
상기 인터페이스수단(50)에는 상기 측정수단(31,32)이 착탈 가능하게 결합되는 제1 커넥터부(51)와, 상기 단말수단(40)이 착탈 가능하게 결합되는 제2 커넥터부(52)가 구비되되, 상기 제2 커넥터부(52)는 상기 단말수단(40)의 종류에 따라 접속 가능하도록 다른 형태로 된 복수의 커넥터(53,54)로 구비된 것을 특징으로 하는 승강기의 로프장력과 견인력 측정장치가 제공된다.
본 발명의 또 다른 특징에 따르면, 승강기(10)의 로프(12) 상에 상기 측정장치(30)의 측정수단(31,32)을 장착하는 단계(S100)와;
상기 단말수단(40) 상에 검사예정인 승강기(10)의 정격적재하중이나 로프(12)의 가닥수를 포함한 기본정보를 입력하는 단계(S200)와;
빈 상태의 승강카(11)를 하강시켜 무부하 상태의 로프장력을 측정하는 단계(S300)와;
상기 승강카(11) 상에 일정 무게의 시험하중을 적재한 상태로 상기 승강카(11)를 하강시켜 부하상태의 로프장력을 측정하는 단계(S400)와;
무부하 상태와 부하상태의 로프장력을 비교하여 옵셋보정하는 단계(S500)와;
빈 상태의 승강카(11)를 비상정지 모드로 로프(12)를 풀어 승강카(11)를 하강 작동시키는 단계(S600)와;
상기 로프(12)의 풀림과정에서의 로프장력을 측정하는 단계(S700)와;
상기 로프(12)의 풀림과정에서의 로프장력과 옵셋보정 상태의 로프장력을 비교하여 견인력을 측정하는 단계(S800)를 포함하는 것을 특징으로 하는 승강기의 로프장력과 견인력 측정방법이 제공된다.
이상에서와 같이 본 발명에 의하면, 로프(12) 상에 지그재그 형태로 끼워지는 복수의 지지롤러(34)가 구비됨에 따라, 측정수단(31,32)을 로프(12) 상에 장착하는 작업이 매우 용이하면서도 상기 지지롤러(34)에 의해 로프(12)의 길이방향을 따라 3점 지지하여 견고한 결합상태를 유지할 수 있는 장점이 있다.
또한 본 발명의 하나의 로프(12)에 장착되는 제1 측정수단(31)과 다른 로프(12)에 장착되는 제2 측정수단(32)으로 구비됨에 따라, 상기 제1 측정수단(31)과 제2 측정수단(32)에 의해 측정된 값의 평균값으로 로프장력과 견인력을 계산하여 측정상의 오차를 줄일 수 있는 장점이 있다.
또한 본 발명은 측정수단(31,32)과 단말수단(40) 사이에 인터페이스수단(50)이 개재되고, 상기 인터페이스수단(50)에 의해 다른 종류의 단말수단(40)을 연결하도록 구비되어 PC나 통상의 DAQ(데이터수집)장비 등에 용이하게 연결할 수 있는 장점이 있다.
또한 본 발명은 승강카(11)를 하강시키거나 로프(12)의 풀림에 따른 로프장력과 견인력을 측정함에 따라, 승강카(11)의 자중을 알지 못한 상황에서도 최대적재하중을 계산할 수 있는 장점이 있다.
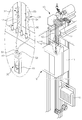
도 1은 본 발명의 일실시예에 따른 장치의 설치상태를 도시한 사시도
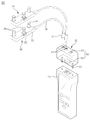
도 2는 본 발명의 일실시예를 따른 장치를 도시한 분해 사시도
도 3은 본 발명의 일실시예에 따른 방법을 도시한 순서도
도 2는 본 발명의 일실시예를 따른 장치를 도시한 분해 사시도
도 3은 본 발명의 일실시예에 따른 방법을 도시한 순서도
상술한 본 발명의 목적, 특징들 및 장점은 다음의 상세한 설명을 통하여 보다 분명해질 것이다. 이하, 본 발명의 바람직한 실시예를 첨부한 도면에 의거하여 설명하면 다음과 같다.
도 1 내지 도 3은 본 발명의 바람직한 실시예를 도시한 것이다. 도 1에 도시된 바와 같이, 본 발명의 측정장치(10)는 승강기(10)의 승강카(11)를 매달도록 연결된 복수의 로프(12) 중에서 두개의 로프(12) 상에 각각 측정수단(31,32)을 결합하고, 그 측정수단(31,32)에 의한 측정값을 단말수단(40)에 의해 평균값으로 환산하여 로프장력과 견인력을 계산 및 표시할 수 있도록 된 것으로, 상기 측정수단(31,32)에는 일정 크기로 된 블록 형태의 측정본체(33) 상에 상기 로프(12) 상에 결합되는 지지롤러(34)와 상기 지지롤러(34) 중의 하나에 연결되어 로프(12)의 장력을 감지하도록 된 로드셀(35)로 구성된 것이다.
이러한 측정수단(31,32)에 있어서, 상기 지지롤러(34)는 측정본체(33)의 일면에 돌출되도록 3개가 구비되고, 각 지지롤러(34)는 로프(12)의 길이방향을 따라 지그재그 형태로 끼워짐에 따라 별도의 볼트체결 등과 같은 체결작업를 배제한 상태에서도 간단하게 끼움결합이 가능할 뿐만 아니라 로프(12) 상에 좌우로 대향된 위치에서 3점 지지되는 결합구조에 의해 견고한 결합상태를 유지할 수 있는 것이다.
또한 상기 측정수단(31,32)은 승강카(11)에 연결되는 복수의 로프(12) 중에서 하나의 로프(12)에 장착되는 제1 측정수단(31)과, 상기 제1 측정수단(31)과는 다른 로프(12) 상에 장착되는 제2 측정수단(32)으로 구성되고, 이 측정수단(31)은 후술되는 인터페이스수단(50)에 의해 단말수단(40)에 연결되는데, 이를 도 2에 의해 설명하면 다음과 같다.
도 2에 도시된 바와 같이, 상기 측정수단(31,32)에는 측정본체(33)로부터 연장되는 케이블(36)과 이 케이블(36)의 단부에 접속구(37)가 구비되고, 상기 제1 측정수단(31)과 제2 측정수단(32)은 인터페이스수단(50)의 일측에 구비된 제1 커넥터부(51) 상에 접속구(37)가 착탈 가능하게 결합되는 것이다.
또한 상기 단말수단(40)은 상기 로드셀(35)에 의해 측정된 데이터값에 의해 로프장력과 견인력을 계산 및 표시하도록 된 것으로, 상기 제1 측정수단(31)과 제2 측정수단(32)에 의한 측정값을 평균값으로 환산하여 로프장력과 견인력을 계산할 수 있도록 소프트웨어가 내장됨과 동시에 계산값 등을 화면상에 표시하도록 구비될 수 있는 것이다.
이러한 단말수단(40)은 통상의 PC나 DAQ장비로 구비될 수 있는 것으로, 상기 인터페이스수단(50) 측에는 상기 단말수단(40)이 착탈 가능하게 결합되는 제2 커넥터부(52)가 구비되고, 상기 제2 커넥터부(52)는 단말수단(40)의 종류 등에 따라 용이하게 접속 가능하도록 다른 형태로 된 복수의 커넥터(53,54)로 구비될 수 있는 것이다.
이와 같은 본 발명의 측정장치(30)를 승강기(10)의 로프(12) 상에 장착하여 로프(12)의 초기장력을 측정하고, 시험하중을 적재한 후에 장력의 변화와 비상정지장치를 작동시킨 상태에서 승강카(11)를 하강 운전하여 로프(12)가 풀리(14)로부터 슬립될 때의 장력변화에 등에 대한 하중을 산출하여 최대견인력(≒최대적재하중)을 측정하게 되는데, 이를 도 3에 의해 설명하면 다음과 같다.
도 3에 도시된 바와 같이, 본 발명의 측정방법은 상기 로프(12) 상에 측정수단(31,32)을 장착하는 단계(S100)와, 기본정보를 입력하는 단계(S200) 그리고 무부하 상태의 로프장력을 측정하는 단계(S300), 부하상태의 로프장력을 측정하는 단계(S400), 옵셋보정하는 단계(S500), 비상정지 모드로 승강카를 하강 작동시키는 단계(S600)와, 로프(12)의 풀림과정에서의 로프장력을 측정하는 단계(S700), 견인력을 측정하는 단계(S800)를 포함하게 된다.
구체적으로, 측정수단(31,32)을 장착하는 단계(S100)에서는 전술된 바와 같은 제1 측정수단(31)과 제2 측정수단(32)을 승강기(10)의 로프(12) 상에 각각 장착하는데, 복수의 로프(12) 중에서 작업자의 숙련된 감각이나 직관 등에 따라 텐션정도가 가장 큰 것과 가장 작은 것으로 판단되는 로프(12)를 선택할 수 있으나, 사실상의 로프(12)에는 하중의 거의 균등하게 분담하여 장력이 작용하는 것임에 따라 어느 로프(12)에 측정수단(31,32)을 장착하여도 상관이 없는 것이다.
또한 기본정보를 입력하는 단계(S200)에서는 전술된 바와 같은 측정장치(30)의 단말수단(40) 상에 검사예정인 승강기(10)에 대한 정격적재하중이나 로프(12)의 가닥수 등을 포함한 필요정보를 입력하게 된다.
또한 무부하 상태의 로프장력을 측정하는 단계(S300)에서는 빈 상태의 승강카(11)를 하강시켜 로프장력을 측정하고, 부하상태의 로프장력을 측정하는 단계(S400)에서는 승강카(11) 내에 일정 무게의 시험하중을 적재한 상태로 하강시켜 로프장력을 측정하게 되는데, 이때의 시험하중의 무게는 정격적재하중의 대략 10~20% 정도의 하중을 적재하게 된다.
또한 옵셋보정하는 단계(S500)에서는 무부하 상태의 로프장력과 부하상태의 로프장력을 비교하여 그 변화량을 단말수단(40) 상에 입력하며, 비상정지 모드로 승강카(11)를 하강 작동시키는 단계(S600)에서는 빈 상태의 승강카(11)를 비상정지장치에 의해 추락 방지한 상태에서 승강기(10)의 권상수단(13)에 의해 로프(12)를 풀어 승강카(11)를 하강시키게 된다.
이러한 상태에서는 승강카(11)가 비상정지장치에 의해 일정 위치에 고정됨에 따라, 상기 권상수단(13)으로부터 언와인딩되는 로프(12)가 느슨해지면서 풀리(14)로부터 슬립되게 되며, 이후에 로프(12)의 풀림과정에서의 로프장력을 측정하는 단계(S700)에서는 전술된 바와 같은 로프(12)의 슬립에 따른 장력을 측정하는 것이다.
또한 견인력을 측정하는 단계(S800)에서는 상기 로프(12)의 풀림과정에서의 로프장력과 옵셋보정 상태의 로프장력을 비교하여 견인력을 계산하게 되고, 이 견인력에 의해 승강기(10)의 최대적재하중을 예측할 수 있게 되는데, 이를 구체적인 수치를 대입하여 설명하면 다음과 같다.
예를 들면, 승강카(11)의 정격적재하중이 1000kg이고, 로프(12)의 가닥수가 5개라면 이를 단말수단(40)에 입력하고, 이후에 측정과정에서 빈 승강카(11)를 하강시킬 때의 로프장력이 200kg으로 측정되고, 시험하중을 100kg 적재한 상태로 측정된 로프장력이 220kg라면 각 로프(12)는 100kg당 20kg의 장력변화가 발생한 것을 알 수 있게 된다.
이후에는 옵셋보정에서 적재하중 100kg에 대한 장력변화량 20kg를 단말수단(40)에 입력하며, 이후의 측정과정에서 비상정지 모드로 승강카(11)를 하강 작동시켜 로프(12)의 풀림시에 측정되는 로프장력이 120kg라면 승강카(11) 자체의 무게가 로프(12)에 작용한 상태의 장력(200kg)에 비해 승강카(11)의 무게가 로프(12)에 작용하지 않은 상태의 장력(120kg)이 80kg 감소한 것이므로, 이는 적재하중에 대한 장력변화량에 대응됨에 따라 100:20=X:80라는 비례식에 의해 X=400을 얻을 수 있게 된다.
이때에, X=400이라는 의미는 각 로프(12)는 정격적재하중에 비해 400kg을 더 견인할 수 있다는 것이고, 만약에 승강카(11)와 이 승강카(11)의 하중을 보상하기 위해 로프(12)의 타단에 연결되는 밸런스 웨이트(15)의 하중차가 500kg(50%의 언밸런스하중)인 경우라면 400kg*2=800kg이므로, 승강기(10)의 최대적재하중은 1800kg이라는 것을 예측할 수 있는 것이다. 이와 같은 본 발명의 측정방법에 따르면, 승강카(11)의 자중을 모르는 상태에서도 최대적재하중을 계산할 수 있다는 점에서 실제의 현장에서 승강카(11)의 자중에 대한 정보를 얻는 것이 쉽지 않음을 감안할 때에 측정상의 편리함을 제공할 수 있게 된다.
이상에서 설명되지 않은 부호는 상기 인터페이스수단(50) 상에 돌출되어 단말수단(40)에 끼워지도록 된 고정핀(55)을 나타낸 것이다.
이상에서 설명한 본 발명은 전술한 실시예 및 첨부된 도면에 의해 한정되는 것이 아니고, 본 발명의 기술적 사상을 벗어나지 않는 범위 내에서 여러 가지 치환, 변형 및 변경이 가능함은 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 명백할 것이다.
10: 승강기 11: 승강카
12: 로프 13: 권상수단
14: 풀리 30: 측정장치
31: 제1 측정수단 32: 제2 측정수단
33: 측정본체 34: 지지롤러
35: 로드셀 36: 케이블
37: 접속구 40: 단말수단
50: 인터페이스수단 51: 제1 커넥터부
52: 제2 커넥터부 53,54: 커넥터
12: 로프 13: 권상수단
14: 풀리 30: 측정장치
31: 제1 측정수단 32: 제2 측정수단
33: 측정본체 34: 지지롤러
35: 로드셀 36: 케이블
37: 접속구 40: 단말수단
50: 인터페이스수단 51: 제1 커넥터부
52: 제2 커넥터부 53,54: 커넥터
Claims (3)
- 승강기(10)의 승강카(11)를 매단 상태로 연장되는 복수의 로프(12) 상에 설치되는 측정본체(33)와, 상기 측정본체(33)의 일면에 돌출되게 구비되어 상기 로프(12)의 길이방향을 따라 3점 지지되도록 로프(12) 상에 지그재그 형태로 끼워지는 복수의 지지롤러(34)와, 상기 지지롤러(34) 중의 하나에 연결되어 로프(12)의 장력을 감지하도록 된 로드셀(35)로 구성된 측정수단(31,32)과;
상기 측정수단(31,32)에 연결되어 상기 로드셀(35)에 의해 측정된 데이터값에 의해 로프장력과 견인력을 계산 및 표시하도록 된 단말수단(40)을 포함하며;
상기 측정수단(31,32)은 상기 로프(12) 중에서 하나의 로프(12)에 장착되는 제1 측정수단(31)과, 상기 제1 측정수단(31)과는 다른 로프(12) 상에 장착되는 제2 측정수단(32)으로 구성되고;
상기 단말수단(40)은 상기 제1 측정수단(31)과 제2 측정수단(32)에 의한 측정값을 평균값으로 환산하여 로프장력과 견인력을 계산하도록 된 것을 특징으로 하는 승강기의 로프장력과 견인력 측정장치.
- 제1항에 있어서, 상기 측정수단(31,32)과 단말수단(40) 사이에는 상기 측정수단(31,32)에 의해 측정된 데이터를 단말수단(40) 측으로 전달하기 위한 인터페이스수단(50)이 개재되며;
상기 인터페이스수단(50)에는 상기 측정수단(31,32)이 착탈 가능하게 결합되는 제1 커넥터부(51)와, 상기 단말수단(40)이 착탈 가능하게 결합되는 제2 커넥터부(52)가 구비되되, 상기 제2 커넥터부(52)는 상기 단말수단(40)의 종류에 따라 접속 가능하도록 다른 형태로 된 복수의 커넥터(53,54)로 구비된 것을 특징으로 하는 승강기의 로프장력과 견인력 측정장치.
- 승강기(10)의 로프(12) 상에 제1항 또는 제2항의 측정장치(30)의 측정수단(31,32)을 장착하는 단계(S100)와;
상기 단말수단(40) 상에 검사예정인 승강기(10)의 정격적재하중이나 로프(12)의 가닥수를 포함한 기본정보를 입력하는 단계(S200)와;
빈 상태의 승강카(11)를 하강시켜 무부하 상태의 로프장력을 측정하는 단계(S300)와;
상기 승강카(11) 상에 일정 무게의 시험하중을 적재한 상태로 상기 승강카(11)를 하강시켜 부하상태의 로프장력을 측정하는 단계(S400)와;
무부하 상태와 부하상태의 로프장력을 비교하여 옵셋보정하는 단계(S500)와;
빈 상태의 승강카(11)를 비상정지 모드로 로프(12)를 풀어 승강카(11)를 하강 작동시키는 단계(S600)와;
상기 로프(12)의 풀림과정에서의 로프장력을 측정하는 단계(S700)와;
상기 로프(12)의 풀림과정에서의 로프장력과 옵셋보정 상태의 로프장력을 비교하여 견인력을 측정하는 단계(S800)를 포함하는 것을 특징으로 하는 승강기의 로프장력과 견인력 측정방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180172590A KR102143284B1 (ko) | 2018-12-28 | 2018-12-28 | 승강기의 로프장력과 견인력 측정장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180172590A KR102143284B1 (ko) | 2018-12-28 | 2018-12-28 | 승강기의 로프장력과 견인력 측정장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200083783A true KR20200083783A (ko) | 2020-07-09 |
| KR102143284B1 KR102143284B1 (ko) | 2020-08-11 |
Family
ID=71602243
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180172590A KR102143284B1 (ko) | 2018-12-28 | 2018-12-28 | 승강기의 로프장력과 견인력 측정장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102143284B1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102594345B1 (ko) | 2023-08-31 | 2023-10-26 | (주)신우 프론티어 | 수직형 휠체어리프트의 케이지 추락방지부 시험장치 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006052040A (ja) * | 2004-08-10 | 2006-02-23 | Fujitec Co Ltd | エレベータの荷重校正方法及び校正装置 |
| JP2009162602A (ja) * | 2008-01-04 | 2009-07-23 | Toshiba Elevator Co Ltd | エレベータのロープ張力測定装置 |
| CN101726383A (zh) * | 2009-12-11 | 2010-06-09 | 太原理工大学 | 多绳提升机钢丝绳张力检测方法及其装置 |
| KR101487623B1 (ko) | 2013-10-31 | 2015-01-30 | 한국승강기 안전관리원 | 엘리베이터의 권상력 측정방법 |
| KR101681599B1 (ko) * | 2016-06-15 | 2016-12-01 | 주식회사 한성시스코 | 안전수단이 구비된 로드셀을 이용한 장력 측정 및 조절 장치 |
| US20170138806A1 (en) * | 2013-09-10 | 2017-05-18 | Southwire Company, Llc | Wireless-Enabled Tension Meter |
| CN207395939U (zh) * | 2017-11-15 | 2018-05-22 | 西安特种设备检验检测院 | 一种电梯钢丝绳张力监测装置 |
-
2018
- 2018-12-28 KR KR1020180172590A patent/KR102143284B1/ko active IP Right Grant
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006052040A (ja) * | 2004-08-10 | 2006-02-23 | Fujitec Co Ltd | エレベータの荷重校正方法及び校正装置 |
| JP2009162602A (ja) * | 2008-01-04 | 2009-07-23 | Toshiba Elevator Co Ltd | エレベータのロープ張力測定装置 |
| CN101726383A (zh) * | 2009-12-11 | 2010-06-09 | 太原理工大学 | 多绳提升机钢丝绳张力检测方法及其装置 |
| US20170138806A1 (en) * | 2013-09-10 | 2017-05-18 | Southwire Company, Llc | Wireless-Enabled Tension Meter |
| US10107699B2 (en) * | 2013-09-10 | 2018-10-23 | Southwire Company, Llc | Wireless enabled tension meter |
| KR101487623B1 (ko) | 2013-10-31 | 2015-01-30 | 한국승강기 안전관리원 | 엘리베이터의 권상력 측정방법 |
| KR101681599B1 (ko) * | 2016-06-15 | 2016-12-01 | 주식회사 한성시스코 | 안전수단이 구비된 로드셀을 이용한 장력 측정 및 조절 장치 |
| CN207395939U (zh) * | 2017-11-15 | 2018-05-22 | 西安特种设备检验检测院 | 一种电梯钢丝绳张力监测装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102143284B1 (ko) | 2020-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FI124542B (en) | Procedure and arrangement for monitoring the condition of lift lines | |
| RU2372271C2 (ru) | Разгрузочный способ измерения для тяговых приводов, в частности приводов ведущего шкива для лифтов | |
| CN107539877B (zh) | 吊钩载荷称重设备 | |
| CN100366519C (zh) | 电梯载荷测量装置及电梯系统 | |
| KR102143284B1 (ko) | 승강기의 로프장력과 견인력 측정장치 및 방법 | |
| KR101487623B1 (ko) | 엘리베이터의 권상력 측정방법 | |
| EP2643670B1 (en) | Arrangement and method for testing the load-supporting capability of a lifting fixture | |
| JP2007168938A (ja) | エレベータの秤装置の調整方法 | |
| CN109890740B (zh) | 电梯装置、以及秤装置的校正方法 | |
| KR101691265B1 (ko) | 엘리베이터의 권상능력평가 및 브레이크 제동력 측정장치 | |
| WO2003074407A1 (fr) | Testeur d'arret d'urgence d'un ascenseur | |
| KR100958298B1 (ko) | 승강기 언밸런스하중 및 최대적재하중 측정방법 및 장치 | |
| CN111302174A (zh) | 电梯平衡系数及电梯静态曳引试验的无载检测方法以及检测装置 | |
| CN111874779A (zh) | 用于检测电梯轿厢的位置的方法和设备 | |
| JP6244281B2 (ja) | エレベータの昇降体の重量測定方法及び重量測定装置 | |
| CN112660954B (zh) | 加载模块、电梯安全保护装置性能检测系统及方法 | |
| KR101015054B1 (ko) | 승강기 언밸런스하중 및 최대적재하중 측정방법 및 장치 | |
| KR102058189B1 (ko) | 엘리베이터 체대 신뢰성 테스트 장치 | |
| KR102581247B1 (ko) | 엘리베이터 시스템의 부하 지지 부재의 텐셔닝 위한 방법 | |
| KR100365315B1 (ko) | 엘리베이터 하중측정장치 | |
| CA2029422C (en) | Procedure and apparatus for producing elevator load data | |
| CN113340630A (zh) | 一种卷扬吊装测力系统及吊装安全监测方法 | |
| KR100923174B1 (ko) | 하중 측정장치를 구비한 엘리베이터 | |
| KR20160081456A (ko) | 소음진동계를 이용한 엘리베이터의 승강카 및 균형추 자중측정방법 | |
| CN107416628B (zh) | 称取电梯轿厢和对重重量的称重装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |