KR20200029014A - Dsi 프로토콜에 기초하여 자동차 내 센서 장치를 작동시키는 방법 - Google Patents
Dsi 프로토콜에 기초하여 자동차 내 센서 장치를 작동시키는 방법 Download PDFInfo
- Publication number
- KR20200029014A KR20200029014A KR1020207004294A KR20207004294A KR20200029014A KR 20200029014 A KR20200029014 A KR 20200029014A KR 1020207004294 A KR1020207004294 A KR 1020207004294A KR 20207004294 A KR20207004294 A KR 20207004294A KR 20200029014 A KR20200029014 A KR 20200029014A
- Authority
- KR
- South Korea
- Prior art keywords
- communication
- power supply
- sensor units
- sensor
- central unit
- Prior art date
Links
Images
Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/87—Combinations of sonar systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B11/00—Transmission systems employing sonic, ultrasonic or infrasonic waves
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/02—Details
- H04L12/10—Current supply arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- H04L12/40045—Details regarding the feeding of energy to the node from the bus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- H04L2012/40273—Bus for use in transportation systems the transportation system being a vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
- Small-Scale Networks (AREA)
Abstract
본 발명은 자동차(1) 내의 센서 장치(2)를 작동하는 방법에 관한 것으로, 센서 장치(2)는 중앙 유닛(3) 및 복수의 센서 유닛(S1, S2, S3)을 가지며, 중앙 유닛(3) 및 센서 유닛(S1, S2, S3)은 버스 케이블(4)에 접속되고, 단계들에 의해 버스 케이블(4)을 통해 중앙 유닛(3)과 센서 유닛(S1, S2, S3) 사이에 통신이 이루어지되, 상기 단계들은, 전력 공급 단계(E) 및 통신 단계(K)를 교대로 수행하는 단계와, 전력 공급 단계(E)에서 센서 유닛(S1, S2, S3)에 전기 에너지를 공급하는 단계와, 통신 단계(K)에서 통신 사이클을 반복적으로 수행하는 단계 - 상기 통신 사이클은, 상기 중앙 유닛(3)으로부터 적어도 하나의 센서 유닛(S1, S2, S3)으로 명령(F1, F2, F3)를 송신하는 것과, 상기 중앙 유닛(3)에서 센서 유닛(S1, S2, S3)의 응답(A1, A2, A3)을 수신하는 것과, 상기 중앙 유닛(3)에서 모든 센서 유닛(S1, S2, S3)으로부터 제각기의 에너지 상태 정보 항목(ES1, ES2, ES3)을 수신하는 것과, 상기 센서 유닛(S1, S2, S3)으로부터의 상기 에너지 상태 정보 항목(ES1, ES2, ES3)이 상기 대응하는 센서 유닛(S1, S2, S3)이 지속 동작을 위해 추가 전기 에너지를 요구함을 나타내면, 상기 통신 단계(K)에서 상기 통신 사이클의 반복 수행을 보충 전력 공급 단계(Z)만큼 중단하는 것을 포함함 - 를 포함한다. 이런 방식으로, 마스터와 슬레이브 사이의 통신이 고 대역폭에서 정상적으로 가능하도록, 자동차(1)에서 센서 장치(2)를 작동시키는 효과적인 방법이 제공된다.
Description
본 발명은 DSI 프로토콜에 기초하여 자동차 내 센서 장치를 작동시키는 방법에 관한 것으로, 센서 장치는 마스터로서의 중앙 유닛과 마스터에 의해 제어되는 슬레이브로서의 다수의 센서 유닛을 가지며, 중앙 유닛과 센서 유닛들은 버스 케이블에 연결되고, 중앙 유닛과 센서 유닛들 사이의 통신은 버스 케이블을 통해 이루어진다. 본 발명은 또한 자동차, 센서 장치, 및 이러한 센서 장치를 갖는 차량에서 이러한 방법을 이용하는 것과 관련이 있다.
DSI 프로토콜 분산 시스템 인터페이스(DSI Protocol Distributed System Interface)(2011년 2월 16일자 DSI3 버스 표준, 개정판 1.00 참고 - 이는 본 발명의 개시에 명시적으로 포함되어 그 일부를 형성한다)는, 마스터가 2선(two-wire) 버스 케이블을 통해 하나 이상의 슬레이브와 통신하는 간단한 2선 케이블 구조에 기초하여, 센서 네트워크가 구축될 수 있게 하는 프로토콜이다. DSI 프로토콜은, 마스터를 통해 다수의 슬레이브, 특히 센서 및 액츄에이터를 폴링 및/또는 제어하기 위해, 주로 자동차에서의 사용을 기반으로 한다.
DSI 프로토콜의 사양은 이러한 센서 장치가 두 가지 동작 클래스 중 하나에서 작동할 수 있음을 명시하고 있는데, 이들 중 하나는 "신호 기능 클래스(Signal Function Class)"이고 다른 하나는 "전력 기능 클래스(Power Function Class)"이다. 이 프로토콜은 또한 기본적으로 세 가지 모드(이들 모드에서 마스터와 슬레이브 사이에 버스가 사용될 수 있다)를 규정한다.
CRM 모드(명령 및 응답 모드)에서는 마스터와 슬레이브간에 양방향 통신이 이루어진다. 마스터는 명령(Command)을 전송하고, 이에 대해 슬레이브가 응답한다(Response). 이 방법은, 예를 들어, 선택적으로 슬레이브에서 특정 값을 질의하거나 슬레이브를 구성하는 데 사용된다.
PDCM 모드(Periodic Data Collection mode)에서, 슬레이브는 지정된 타임 슬롯 내에서 비교적 많은 양의 데이터를 마스터로 전송하며, 여기서 마스터의 전송 동작은 동기화 신호(브로드캐스트 읽기 명령(Broadcast Read Command))를 통해 슬레이브에 이 타임 슬롯을 결정하기 위한 기준점을 제공하는 것으로 제한된다. 슬레이브는 이미 각 타임 슬롯에 대한 정보를 미리 갖추고 있어, 동기화 신호에 응답하여 각각의 전송 시간 간격을 결정하며, 이에 기초하여 센서 데이터를 마스터에 전송할 수 있다.
전력 공급 단계에서, 에너지 소비가 높은 슬레이브에 충분한 에너지를 공급하기 위해 비교적 많은 양의 전기 에너지가 전달된다.
전술한 사양에 따른 전술한 신호 기능 클래스는, 에너지 소비가 낮고 슬레이브에서 마스터로 전송되는 데이터 트래픽이 비교적 높은 슬레이브들을 연결하는 데 주로 사용된다. 신호 기능 클래스의 센서 장치를 시운전한 후 CRM 모드에서 마스터와 슬레이브 사이에 제1 통신 단계가 발생하며, 이 단계 동안에 슬레이브는 일반적으로, 예컨대 이 슬레이브에 대해 전술한 PDCM 타임 슬롯의 파라미터와 관련하여 구성된다. 이 단계가 완료되면, 센서 장치는 PDCM 모드로 전환되고, 여기서 슬레이브는 마스터의 동기 신호에 응답하여, 수집된 데이터를 제각기 할당된 타임 슬롯에서 중앙 엔티티로 전송한다. PDCM 모드에서 이 단계는 일반적으로 센서 장치의 동작이 중단될 때까지 다시 종료되지 않는다. 전력 공급 단계는 신호 기능 클래스에 따라서는 제공되지 않고, 슬레이브의 낮은 에너지 소비로 인해 필요하지도 않다.
전술한 전력 기능 클래스는, 에너지 소비가 높고 마스터에서 슬레이브로 전송되는 데이터 트래픽이 비교적 낮은 슬레이브들의 연결에 주로 사용된다. 전력 기능 클래스의 센서 장치의 동작에서, CRM 모드에서 마스터와 슬레이브 사이의 통신 단계들은 전력 공급 단계들과 교대로 발생한다. 전력 공급 단계의 지속 기간은 일반적으로 크게 우세하다. CRM 모드에 비해 더 높은 전압으로 이들 단계에서 슬레이브에 비교적 많은 양의 에너지를 공급하는 것은, 특히 액츄에이터가 작동될 수 있다는 것을 의미하는데, 이는 일반적으로 CRM 단계에서 마스터로부터 슬레이브로 이전에 전송된 제어 명령에 기초하여 수행된다. PDCM 모드는 전력 기능 클래스에 따라 적용할 수 없는데, 이는 전술한 액츄에이터의 경우 데이터량이 적어서 불필요하기 때문이다.
PDCM 모드에서, 데이터 전송은 마스터가 지정한 고정 스키마(fixed schema)를 따른다. 이와 관련하여, 각각의 슬레이브는 일반적으로 고정된 타임 슬롯, 즉 마스터에 의해 방출된 동기화 신호와 관련하여 지정된 기간이 할당되며, 여기서 데이터는 각각의 슬레이브에서 마스터로 전송된다.
WO 2016/054345 A1에는, 석유, 가스 또는 발전 산업에서 사용되는 것과 같은 구조의 상태 또는 무결성을 모니터링하기 위한 초음파 시스템이 기술되어 있다. 이 시스템은 다수의 초음파 센서 및 적어도 하나의 디지털 센서 인터페이스를 포함한다.
문서 DE 10 2013 226 376 A1은 초음파 센서 및 제어 유닛으로 센서 시스템을 작동시키는 방법을 기술하는데, 여기서 초음파 센서로부터 제어 유닛으로의 데이터는 전류 변조되고 제어 유닛으로부터 초음파 센서로의 데이터는 전압 변조된다. 이 솔루션은, 적절한 PSI5 데이터 버스 인터페이스를 수정한 후 데이터 전송을 위한 데이터 버스와 LIN 데이터 버스만 서로 결합되도록 하여 두 버스 시스템의 장점을 활용할 수 있게 한다.
DE 10 2012 103 907 A1에는, 송신기 유닛에 연결된 자동차 제어 유닛의 수신기 유닛을 작동시키는 방법이 설명되어 있다. 수신기 유닛은 수신된 신호에 송신기 유닛의 가상 어드레스를 포함하는 식별자를 추가한다. 이것은 PSI5 Version1 표준에 따른 센서 장치를 PSI Version2 표준의 신호를 처리하는 자동차 제어 장치에 연결하는 데 사용될 수 있다.
마지막으로, 문헌 EP 2 263 102 B1에는 복수의 센서를 갖는 초음파 기반 운전자 보조 시스템이 기술되어 있다. 이들 센서에는 각각 고유 식별 코드가 할당되어 있으며, 이는 인터페이스를 통해 제어 유닛에 의해 판독될 수 있다. 인터페이스는 PSI(Peripheral Sensor Interface)를 준수하도록 설계된 2선 버스 인터페이스이다.
본 발명의 목적은 DSI 프로토콜에 기초하여 자동차에서 센서 장치를 작동시키는 방법을 구체화하는 것으로, 마스터와 슬레이브 사이의 고 대역폭 통신이 정상적으로 가능하다.
이 목적은 독립 청구항의 주제에 의해 달성된다. 본 발명의 바람직한 확장은 종속 청구항에 기재되어 있다.
따라서, 본 발명에 따르면, DSI 프로토콜에 기초하여 자동차 내 센서 장치를 작동시키는 방법이 제공되며, 여기서,
센서 장치는 마스터로서의 중앙 유닛과 마스터에 의해 제어되는 슬레이브로서의 복수의 센서 장치를 가지며,
중앙 유닛 및 센서 유닛은 버스 케이블에 접속되고,
단계들에 의해 버스 케이블을 통해 중앙 유닛과 센서 유닛 사이에 통신이 이루어지되, 상기 단계들은,
한편으로는 전력 공급 단계를 다른 한편으로는 통신 단계를 교대로 수행하는 단계 - 상기 전력 공급 단계와 상기 통신 단계는 각각 미리 결정된 지속 기간 동안 유지됨 - 와,
전력 공급 단계(E)가 지속되는 동안 전력 공급 단계에서 센서 유닛에 전기 에너지를 공급하는 단계와,
통신 단계가 지속되는 동안 통신 단계에서 통신 사이클을 반복적으로 수행하는 단계 - 상기 통신 사이클은, 중앙 유닛으로부터 적어도 하나의 센서 유닛으로 명령를 송신하는 것과, 중앙 유닛에서 센서 유닛의 적어도 하나의 응답을 수신하는 것과, 중앙 유닛에서 모든 센서 유닛으로부터 제각기의 에너지 상태 정보 항목을 수신하는 것과, 센서 유닛으로부터의 에너지 상태 정보 항목 중 적어도 한 항목이 대응하는 센서 유닛이 지속 동작을 위해 추가 전기 에너지를 요구함을 나타내면, 통신 단계에서 통신 사이클의 반복 수행을 보충 전력 공급 단계만큼 중단하는 것을 포함함 - 를 포함한다.
따라서, 센서 유닛이 추가 에너지 없이는 추가 통신 사이클을 수행할 수 없는 위험이 있는 경우, 보충 전력 공급 단계만큼 통신 단계가 중단될 수 있는 것이 본 발명의 기본적인 특징이다. 이러한 방식으로, 통신 단계의 지속 기간이 종래의 경우보다 더 길게 선택될 수 있다. 이는, 가능한 최악의 모든 시나리오에 있어서, 센서 장치로 전송되는 에너지가 실제로 통신 단계의 전체 기간 동안 충분할 것을 더 이상 보장할 필요가 없다는 것을 의미한다. "비상" 상황에서, 추가로 필요한 에너지가 전달되는 보충 전력 공급 단계만큼 통신 단계의 중단이 결국 발생할 수 있다. 이는 통신 단계의 시간이 더 길어지게 하며, 그 결과 기존 솔루션에 비해 마스터와 슬레이브 사이의 데이터 전송 대역폭이 증가할 수 있다.
원칙적으로, 통신 단계가 보충 전력 공급 단계 동안 전혀 중단되지 않거나 또는 한 번만 중단되지 않는 것이 가능하다. 그러나, 본 발명의 바람직한 개선에 따르면, 센서 유닛으로부터의 에너지 상태 정보 항목 중 적어도 하나가 해당 센서 유닛이 추가 전기 에너지를 요구함을 나타낼 경우, 제각기의 보충 전력 공급 단계만큼 통신 단계에서 통신 사이클의 반복 구현의 추가 중단이 또한 가능하다. 이 추가 중단 후에 보충 전력 공급 단계를 위한 추가적인 중단이 이어질 수 있다.
본 발명에 따르면, 통신 단계가 보충 전력 공급 단계에 의해 중단된 경우, 통신 단계를 연장하는 것이 절대적으로 필수적인 것은 아니다. 그러나, 본 발명의 바람직한 개선에 따르면, 보충 전력 공급 단계 또는 보충 전력 공급 단계들의 지속 기간만큼 통신 단계의 미리 결정된 지속 기간이 연장된다. 따라서, 실제로 마스터와 슬레이브 사이의 계획된 전체 통신이, 이 통신의 일부를 나중 통신 단계로 이동할 필요없이, 처리될 수 있도록 보장될 수 있다.
본 발명의 바람직한 개선에 따르면, 보충 전력 공급 단계의 발생이 기록되고 통신 단계의 지속 기간은 보충 전력 공급 단계가 발생하지 않는 한 계속해서 연장된다. 가능한 보충 전력 공급 단계로 인해, 보충 전력 공급 단계가 없었더라면 센서 유닛이 더 이상 가용 에너지를 충분히 갖지 못했을 상황에서도 지속적인 작동이 보장될 수 있기 때문에, 이러한 통신 단계의 연장은 통신 대역폭을 개선하고 따라서 위험을 감수할 수 있게 한다. 이러한 방식으로, 통신 단계에 이용 가능한 시간의 비율은 바람직하게는 보충 전력 공급 단계가 전혀 요구되지 않거나 또는 거의 드물게 요구될 정도까지 확장될 수 있다.
본 발명의 범위 내에서, 센서 유닛은 에너지 상태 정보를 통해, 지속적인 동작을 위해 충분한 에너지를 더 이상 이용할 수 없게 되는 시간 이전에 이미 몇 번의 통신 사이클에 걸쳐 추가 전기 에너지가 필요하다는 신호를 보낸다. 바람직하게는 센서 유닛은 대응하는 센서 유닛이 미리 결정된 수보다 적은 수의 통신 사이클을 구현할 수 있을 때에만 에너지 상태 정보를 통해 추가 전기 에너지가 필요하다고 처음 표시한다. 미리 결정된 수의 통신 사이클은 특히 매우 바람직하게는 1개이다. 이러한 방식으로, 개별 센서 유닛에 이용 가능한 에너지가 충분히 사용되며, 추가 전기 에너지 없이는 통신 단계 내의 추가 동작이 실제로 더 이상 가능하지 않을 때까지 통신 단계의 중단이 발생하지 않는다. 이러한 방식으로, 마스터와 슬레이브 간의 데이터 전송에서 특히 높은 대역폭이 달성된다.
본 발명은 또한 전술한 바와 같은 방법을 자동차에 사용하는 것과 관련된다. 본 발명은 또한 전술한 바와 같은 방법에 의해 작동하도록 구성된 센서 장치와 관련된다. 마지막으로, 본 발명은 또한 이러한 센서 장치를 갖는 자동차와 관련된다.
전반적으로, 본 발명에 있어서 센서 유닛과 중앙 유닛은 바람직하게는 버스 케이블을 통해 서로 직렬로 연결되어 소위 "데이지 체인(daisy-chain)"구성으로 되어 있는 것이 사실이다. 또한, 본 발명의 바람직한 개선에 따르면, 센서 유닛들 각각은 전력 기능 클래스의 적어도 하나의 액츄에이터를 갖는다. 센서 장치 전체가 전력 기능 클래스의 유형인 경우가 특히 바람직하다. 또한, 버스 케이블은 바람직하게는 2선 케이블이다. 또한, 센서 장치는 센서 유닛으로서 초음파 신호를 송신 및/또는 수신하기 위한 초음파 센서 유닛을 구비하는 것이 바람직하다.
이하에서, 본 발명은 바람직한 실시예에 기초한 도면을 참조하여 보다 상세하게 설명된다. 설명된 특징들은 개별적으로 그리고 조합하여 본 발명의 양태를 나타낼 수 있다.
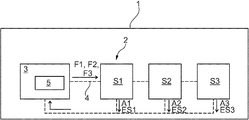
도 1은 데이지 체인(daisy-chain) 구성에서 마스터로서의 중앙 유닛과 슬레이브로서의 3개의 센서 유닛을 갖는 본 발명의 바람직한 실시예에 따른 센서 장치를 구비한 자동차의 개략도이다.
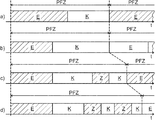
도 2는 본 발명의 바람직한 실시예에 따른, 다양한 경우에 전력 공급 단계, 통신 단계 및 보충 전력 공급 단계의 시간 순서를 나타내는 개략도이다.
도 1은 데이지 체인(daisy-chain) 구성에서 마스터로서의 중앙 유닛과 슬레이브로서의 3개의 센서 유닛을 갖는 본 발명의 바람직한 실시예에 따른 센서 장치를 구비한 자동차의 개략도이다.
도 2는 본 발명의 바람직한 실시예에 따른, 다양한 경우에 전력 공급 단계, 통신 단계 및 보충 전력 공급 단계의 시간 순서를 나타내는 개략도이다.
도 1은 본 발명의 바람직한 실시예에 따른 센서 장치를 갖는 자동차(1)의 개략도이다. 센서 장치(2)는 중앙 유닛(3) 및 3개의 센서 유닛(S1, S2 및 S3)을 포함한다. 마스터(3) 및 센서 유닛(S1, S2, S3)은 2선 케이블( two-wire cable)로 구현되는 버스 케이블(4)에 의해 서로 연결된다. 또한, 중앙 유닛(3)과 센서 유닛(S1, S2, S3)은 연결되는 경우, 서로 직렬로, 즉 소위 데이지 체인 구성으로 연결된다.
전술한 DSI3 사양의 의미 내에서, 중앙 유닛(3)은 버스 케이블(4)을 통해 DSI3 사양에서 슬레이브로서 작용하는 3개의 센서 유닛(S1, S2, S3)에 연결된 마스터를 나타내며, 따라서 전반적으로 DSI3 사양의 의미에서의 버스가 존재한다. 또한, 센서 유닛(S1, S2, S3)은 비교적 높은 에너지 소비를 갖는 액추에이터를 구비한 센서 유닛이며, 따라서 전술한 전력 기능 클래스에 속한다. 전술한 바와 같이, 전력 기능 클래스의 이 센서 장치(2)의 동작에서, 도 2를 참조하여 아래에서 상세히 설명되는 바와 같이, 한편으로는 전력 공급 단계와 다른 한편으로는 통신 단계가 교대로 발생한다.
도 2는 전력 기능 사이클(PFZ) 시퀀스의 4개의 상이한 경우 a) 내지 d)를 도시한 것으로, 이들은 각각 반복되며, 중심 유닛(3)으로부터 센서 유닛(S1, S2, S3)으로의 에너지 전달 및 중앙 유닛(3)과 센서 유닛(S1, S2, S3) 사이의 통신을 모두 포함한다. 경우 a)에서, 비교적 긴 전력 공급 단계(E)가 발생하는데, 여기서 중앙 유닛(3)으로부터 센서 유닛(S1, S2, S3)으로 에너지가 전달된다. 이 전력 공급 단계 동안, 중앙 유닛(3)과 센서 유닛(S1, S2, S3) 사이에는 통신이 이루어지지 않는다.
전력 공급 단계(E) 다음에는 통신 단계(K)가 이어지고, 이 통신 단계 내에서 중앙 유닛(3)과 센서 유닛(S1, S2, S3) 사이의 통신이 수행된다. 이 통신 단계 동안, 센서 유닛(S1, S2, S3)으로의 에너지 공급은 일어나지 않는다. 각 경우에 응답(A1, A2, A3)뿐만 아니라 에너지 상태 정보 항목(ES1, ES2, ES3)도 버스로 전달된다. 도 1에서 명확히 알 수 있듯이, 이 통신 단계에서, 중앙 유닛(3)이 질문(question)과 같은 명령(F1, F2, F3)을 센서 유닛(S1, S2, S3)에 보내고, 이들 센서 유닛은 응답(A1, A2, A3)으로 응답하며, 이들 응답은 중앙 유닛(3)으로 보내져서 중앙 유닛(3)에 의해 수신된다. 통신 단계(K)의 종료와 함께 전력 기능 사이클(PFZ)도 종료되고, 새로운 동일한 전력 기능 사이클(PFZ)이 새로운 전력 공급 단계(E)와 함께 시작한다.
경우 a)에서, 전력 공급 단계(E)의 지속 기간은 충분한 에너지가 센서 유닛(S1, S2, S3)으로 전달될 수 있을 정도로 충분히 길기 때문에, 통신 단계(K) 동안 이들에 이용 가능한 충분한 에너지가 항상 존재한다. 따라서, 이 시간 동안 센서 유닛(S1, S2, S3)에 추가적인 에너지가 제공될 필요없이 전체 통신 단계(K) 동안 동작이 보장된다. 그러나, 원칙적으로, 센서 장치(2)를 동작시키기 위한 본 경우에 기술된 방법은 계속 작동하기 위해 추가 에너지가 필요한 센서 유닛(S1, S2, S3)에 보충 전력 공급 단계(Z)에서 추가 에너지를 전달하기 위해 통신 단계(K)가 중단될 수도 있다.
이를 위해, 전술한 이들의 응답(A1, A2, A3)에 더하여, 센서 유닛(S1, S2, S3)은 제각기의 경우에 에너지 상태 정보 항목(ES1, ES2, ES3)을 버스에 전달한다. 이들 에너지 상태 정보 항목(ES1, ES2, ES3)은 각 센서 유닛(S1, S2, S3)이 지속적인 작동을 위해 추가적인 전기 에너지를 필요로 하는지 여부를 나타낸다. 구체적으로, 본 경우에 설명된 본 발명의 바람직한 실시예에 따르면, 각 센서 유닛(S1, S2, S3)의 에너지 상태 정보 항목(ES1, ES2, ES3)은, 대응하는 센서 유닛(S1, S2, S3)에 사전에 추가 전기 에너지가 공급되지 않고 현재 통신 단계(K) 내에서 더 이상의 통신 사이클이 실제로 가능하지 않을 경우, 대응하는 센서 유닛(S1, S2, S3)이 계속 작동을 위해 추가 전기 에너지를 필요로 함을 나타낸다. 중앙 유닛(3)에서, 이 에너지 상태 정보(ES1, ES2, ES3)는, 필요에 따라 보충 전력 공급 단계(Z)를 개시하기 위해 에너지 상태 모니터(5)에 의해 기록되고 평가된다.
이 경우에, 적어도 하나의 보충 전력 공급 단계(Z)의 발생 확률이 0보다 더 큰 방식으로 전력 공급 단계(E)의 지속 기간을 조정하기 위해 보충 전력 공급 단계(Z)의 발생이 기록된다. 경우 a)에서 보충 전력 공급 단계(Z)가 발생하지 않았기 때문에, 경우 b)에서 전력 공급 단계(E)는 이제 경우 a)에 비해 단축된다. 이러한 방식으로, 전력 기능 사이클(PFZ)이 연장되지 않고 통신 단계(K)에 더 큰 시간 간격이 이용 가능하다. 경우 b)에서 센서 유닛(S1, S2, S3)의 작동 동안, 전력 공급 단계(E)에서 전송된 에너지는 센서 유닛(S1, S2, S3)이 추가적인 에너지를 요구함 없이 통신 단계(K)의 전체 기간 동안 지속되기에 여전히 충분하다. 따라서, 원칙적으로, 전력 공급 단계(E)의 추가 감소가 이루어질 수 있다. 그러나, 센서 유닛(S1, S2, S3)의 동작이 변경되면, 이 경우의 상태는, 경우 c)에 대해 후술되는 바와 같이, 변할 수 있다.
경우 c)에서는, 동일한 에너지가 센서 유닛(S1, S2, S3)으로 전송되는 경우와 동일한 전력 공급 단계(E)에 있어서, 센서 유닛(S1, S2, S3)의 상이한 동작으로 인해 적어도 하나의 센서 유닛(S1, S2, S3)의 에너지가 통신 단계(K)의 전체 지속 기간 동안 지속하기에 충분하지 않다. 해당 센서 유닛(S1, S2, S3)의 추가 동작을 위해 추가적인 에너지가 필요함을 나타내는 센서 유닛(S1, S2, S3) 중 하나로부터의 에너지 상태 정보 항목(ES1, ES2, ES3)의 적절한 전송에 응답하여, 통신 단계(K)가 보충 전력 공급 단계(Z)에 의해 중단된다. 이 보충 전력 공급 단계(Z)에서, 센서 유닛(S1, S2, S3)에 추가 에너지가 공급되어, 이들이 계속 작동될 수 있으며, 이후 통신 단계(K)가 완료될 수 있다.
따라서, 보충 전력 공급 단계(Z)에 의한 중단을 포함하여 전체 통신 단계(K)는 이 보충 전력 공급 단계(Z)의 지속 기간만큼 정확하게 연장되며, 그 결과 전력 기능 사이클(PFZ)이 발생하며, 이는 정확히 보충 전력 공급 단계(Z)의 지속 기간만큼 연장된다. 보충 전력 공급 단계(Z)의 지속 기간만큼 전력 기능 사이클(PFZ)을 연장하면, 중앙 유닛(3)과 센서 유닛(S1, S2, S3) 사이의 통신은 통신 단계(K)의 중단이 발생하지 않은 정상적인 경우와 동일한 방식으로 완료된다.
마지막으로, 경우 d)에서는, 통신 단계(K)의 중단이 복수 회 발생할 수 있는 것으로 도시되어 있다. 본 경우에, 센서 유닛(S1, S2, S3)의 지속적인 작동을 보장하기 위해 각 보충 전력 공급 단계(Z)에 의한 2회의 중단이 발생한다. 또한, 전력 기능 사이클(PFZ)은 전체적으로 중앙 유닛(3)과 센서 유닛(S1, S2, S3) 사이의 완전한 통신을 보장하기 위해 보충 전력 공급 단계(Z)의 전체 지속 기간만큼 연장된다.
1: 자동차
2: 센서 장치
3: 중앙 유닛
4: 버스 케이블
5: 에너지 상태 모니터
S1: 센서 유닛
S2: 센서 유닛
S3: 센서 유닛
E: 전력 공급 단계
K: 통신 단계
Z: 보충 전력 공급 단계
F1: 명령
F2: 명령
F3: 명령
A1: 응답
A2: 응답
A3: 응답
ES1: 에너지 상태 정보
ES2: 에너지 상태 정보
ES3: 에너지 상태 정보
PFZ: 전력 기능 사이클
2: 센서 장치
3: 중앙 유닛
4: 버스 케이블
5: 에너지 상태 모니터
S1: 센서 유닛
S2: 센서 유닛
S3: 센서 유닛
E: 전력 공급 단계
K: 통신 단계
Z: 보충 전력 공급 단계
F1: 명령
F2: 명령
F3: 명령
A1: 응답
A2: 응답
A3: 응답
ES1: 에너지 상태 정보
ES2: 에너지 상태 정보
ES3: 에너지 상태 정보
PFZ: 전력 기능 사이클
Claims (11)
- DSI 프로토콜에 기초하여 자동차(1) 내의 센서 장치(2)를 작동하는 방법으로서,
상기 센서 장치(2)는 마스터로서의 중앙 유닛(3)과 상기 마스터에 의해 제어되는 슬레이브로서의 복수의 센서 유닛(S1, S2, S3)을 포함하며,
상기 중앙 유닛(3) 및 상기 센서 유닛(S1, S2, S3)은 버스 케이블(4)에 접속되고,
단계들에 의해 상기 버스 케이블(4)을 통해 상기 중앙 유닛(3)과 상기 센서 유닛(S1, S2, S3) 사이에 통신이 이루어지되, 상기 단계들은,
한편으로는 전력 공급 단계(E)를 다른 한편으로는 통신 단계(K)를 교대로 수행하는 단계 - 상기 전력 공급 단계(E)와 상기 통신 단계(K)는 각각 미리 결정된 지속 기간 동안 유지됨 - 와,
상기 전력 공급 단계(E)가 지속되는 동안 상기 전력 공급 단계(E)에서 상기 센서 유닛(S1, S2, S3)에 전기 에너지를 공급하는 단계와,
상기 통신 단계(K)가 지속되는 동안 상기 통신 단계(K)에서 통신 사이클을 반복적으로 수행하는 단계 - 상기 통신 사이클은, 상기 중앙 유닛(3)으로부터 적어도 하나의 센서 유닛(S1, S2, S3)으로 명령(F1, F2, F3)을 송신하는 것과, 상기 중앙 유닛(3)에서 센서 유닛(S1, S2, S3)의 적어도 하나의 응답(A1, A2, A3)을 수신하는 것과, 상기 중앙 유닛(3)에서 모든 센서 유닛(S1, S2, S3)으로부터 제각기의 에너지 상태 정보 항목(ES1, ES2, ES3)을 수신하는 것과, 상기 센서 유닛(S1, S2, S3)으로부터의 상기 에너지 상태 정보 항목(ES1, ES2, ES3) 중 적어도 한 항목이 대응하는 상기 센서 유닛(S1, S2, S3)이 지속 동작을 위해 추가 전기 에너지를 요구함을 나타내면, 상기 통신 단계(K)에서 상기 통신 사이클의 반복 수행을 보충 전력 공급 단계(Z)만큼 중단하는 것을 포함함 - 를 포함하는,
방법.
- 제1항에 있어서,
상기 단계들은, 상기 센서 유닛(S1, S2, S3)으로부터의 상기 에너지 상태 정보 항목(ES1, ES2, ES3) 중 적어도 한 항목이 대응하는 상기 센서 유닛(S1, S2, S3)이 추가 전기 에너지를 요구함을 나타내면, 상기 통신 단계(K)에서 상기 통신 사이클의 반복 수행을 제각기의 보충 전력 공급 단계(Z)만큼 한 번 더 중단하는 단계를 더 포함하는,
방법.
- 제1항 또는 제2항에 있어서,
상기 단계들은, 상기 보충 전력 공급 단계(Z) 또는 보충 전력 공급 단계들(Z)의 지속 기간만큼 상기 통신 단계(K)의 상기 미리 결정된 지속 기간을 연장하는 단계를 더 포함하는,
방법.
- 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 단계들은,
상기 보충 전력 공급 단계(Z)의 발생을 기록하는 단계와,
적어도 하나의 보충 전력 공급 단계(Z)의 발생 확률이 0보다 큰 방식으로 상기 전력 공급 단계(E)의 지속 기간을 조정하는 단계를 더 포함하는,
방법.
- 제1항 내지 제4항 중 어느 한 항에 있어서,
상기 단계들은, 상기 센서 유닛(S1, S2, S3)이 미리 결정된 통신 사이클 수보다 더 적은 수의 통신 사이클만 수행할 수 있는 경우, 상기 에너지 상태 정보 항목(ES1, ES2, ES3)을 통해, 상기 대응하는 센서 유닛(S1, S2, S3)이 추가 전기 에너지를 요구함을 나타내는 단계를 포함하는,
방법.
- 제5항에 있어서,
상기 미리 결정된 통신 사이클 수는 1개인,
방법.
- 제1항 내지 제6항 중 어느 한 항에 따른 방법의 자동차(1)에서의 사용.
- 비휘발성 컴퓨터 판독 가능 저장 매체로서,
프로세서에서 실행될 경우에, 제1항 내지 제6항 중 어느 한 항에 따른 방법을 구현하는,
비휘발성 컴퓨터 판독 가능 저장 매체.
- 제1항 내지 제6항 중 어느 한 항에 따른 방법에 의해 작동하도록 구성된,
센서 장치.
- 제9항에 있어서,
초음파 신호를 송신 및/또는 수신하기 위한 초음파 센서 유닛을 센서 유닛(S1, S2, S3)으로서 포함하는,
센서 장치.
- 제10항에 있어서,
에너지 상태 모니터(5) - 상기 에너지 상태 모니터(5)에 의해, 상기 센서 유닛(S1, S2, S3)으로부터의 상기 에너지 상태 정보의 수신에 응답하여, 상기 통신 단계(K)가 보충 전력 공급 단계(Z)만큼 중단될 수 있음 - 를 갖는 중앙 유닛(3)을 포함하는,
센서 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017118574.7A DE102017118574A1 (de) | 2017-08-15 | 2017-08-15 | Verfahren zum Betreiben einer Sensoranordnung in einem Kraftfahrzeug auf Basis eines DSI-Protokolls |
| DE102017118574.7 | 2017-08-15 | ||
| PCT/EP2018/071867 WO2019034579A1 (de) | 2017-08-15 | 2018-08-13 | Verfahren zum betreiben einer sensoranordnung in einem kraftfahrzeug auf basis eines dsi-protokolls |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200029014A true KR20200029014A (ko) | 2020-03-17 |
| KR102298186B1 KR102298186B1 (ko) | 2021-09-07 |
Family
ID=63244591
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207004294A KR102298186B1 (ko) | 2017-08-15 | 2018-08-13 | Dsi 프로토콜에 기초하여 자동차 내 센서 장치를 작동시키는 방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11671269B2 (ko) |
| EP (1) | EP3669527B1 (ko) |
| JP (1) | JP6894043B2 (ko) |
| KR (1) | KR102298186B1 (ko) |
| DE (1) | DE102017118574A1 (ko) |
| WO (1) | WO2019034579A1 (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018114225A1 (de) | 2018-06-14 | 2019-12-19 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betreiben einer Sensoranordnung in einem Kraftfahrzeug auf Basis eines DSI-Protokolls |
| DE102018114218B4 (de) * | 2018-06-14 | 2020-06-25 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betreiben einer Sensoranordnung in einem Kraftfahrzeug auf Basis eines DSI-Protokolls |
| DE102018119533A1 (de) | 2018-08-10 | 2020-02-13 | Valeo Schalter Und Sensoren Gmbh | Verfahren und Vorrichtung zum Bereitstellen eines digitalen Sensorsignals eines Ultraschallsensors |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130107345A (ko) * | 2010-12-20 | 2013-10-01 | 알까뗄 루슨트 | 개인 영역 네트워크에서 통신하기 위한 방법 및 장치 |
| KR20160149992A (ko) * | 2015-06-18 | 2016-12-28 | 삼성전자주식회사 | 센서 네트워크에 대한 커뮤니케이션 시스템 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09298486A (ja) * | 1996-04-30 | 1997-11-18 | Yamatake Honeywell Co Ltd | 非接触データ送受信方法およびその装置 |
| JP4320598B2 (ja) * | 2004-02-02 | 2009-08-26 | 三菱電機株式会社 | 通信アダプタ |
| DE102007003010B4 (de) * | 2006-01-31 | 2017-02-09 | Sew-Eurodrive Gmbh & Co Kg | Anlage, Vorrichtung und Verfahren |
| DE102008000570A1 (de) | 2008-03-07 | 2009-09-10 | Robert Bosch Gmbh | Ultraschallbasiertes Fahrerassistenzsystem |
| DE102010002679B4 (de) * | 2010-03-09 | 2023-01-05 | Robert Bosch Gmbh | Verfahren zur Versorgung mindestens eines Busteilnehmers |
| EP2577878A4 (en) * | 2010-05-28 | 2016-12-07 | Ronen Apelker | SYSTEM AND METHOD FOR CONTROLLING AUTOMATED LOADS |
| DE102012103907A1 (de) | 2012-05-04 | 2013-11-07 | Continental Automotive Gmbh | Verfahren zum Betrieb einer Empfangseinheit eines mit zumindest einer Sendeeinheit verbundenen Kraftfahrzeugsteuergeräts |
| US9292409B2 (en) * | 2013-06-03 | 2016-03-22 | Infineon Technologies Ag | Sensor interfaces |
| US9343959B2 (en) * | 2013-11-26 | 2016-05-17 | Infineon Technologies Ag | Interrupt protection circuits, systems and methods for sensors and other devices |
| DE102013226376A1 (de) | 2013-12-18 | 2015-06-18 | Robert Bosch Gmbh | Verfahren zur Sensoranbindung |
| DE102014113456B4 (de) * | 2014-09-18 | 2019-03-14 | Infineon Technologies Ag | Sensorvorrichtung und sensoranordnung |
| US10247705B2 (en) | 2014-10-01 | 2019-04-02 | Sensor Networks, Inc. | Asset-condition monitoring system |
| EP3274473B1 (en) | 2015-03-24 | 2020-10-28 | Pacific Biosciences of California, Inc. | Methods and compositions for single molecule composition loading |
| WO2016206921A1 (en) * | 2015-06-25 | 2016-12-29 | Koninklijke Philips N.V. | Device and method for monitoring a physiological state of a subject |
-
2017
- 2017-08-15 DE DE102017118574.7A patent/DE102017118574A1/de not_active Withdrawn
-
2018
- 2018-08-13 JP JP2020508471A patent/JP6894043B2/ja active Active
- 2018-08-13 KR KR1020207004294A patent/KR102298186B1/ko active IP Right Grant
- 2018-08-13 US US16/637,933 patent/US11671269B2/en active Active
- 2018-08-13 WO PCT/EP2018/071867 patent/WO2019034579A1/de unknown
- 2018-08-13 EP EP18755783.0A patent/EP3669527B1/de active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130107345A (ko) * | 2010-12-20 | 2013-10-01 | 알까뗄 루슨트 | 개인 영역 네트워크에서 통신하기 위한 방법 및 장치 |
| KR20160149992A (ko) * | 2015-06-18 | 2016-12-28 | 삼성전자주식회사 | 센서 네트워크에 대한 커뮤니케이션 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3669527A1 (de) | 2020-06-24 |
| US11671269B2 (en) | 2023-06-06 |
| US20210399906A1 (en) | 2021-12-23 |
| EP3669527B1 (de) | 2021-07-21 |
| JP6894043B2 (ja) | 2021-06-23 |
| DE102017118574A1 (de) | 2019-02-21 |
| KR102298186B1 (ko) | 2021-09-07 |
| JP2020532178A (ja) | 2020-11-05 |
| WO2019034579A1 (de) | 2019-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20200249312A1 (en) | Method for operating a sensor arrangement in a motor vehicle on the basis of a dsi protocol | |
| KR102298187B1 (ko) | 디에스아이 프로토콜 기반 자동차 내 센서 장치 작동 방법 | |
| US11313964B2 (en) | Methods for operating a sensor arrangement on the basis of a DSI protocol in a motor vehicle and also a corresponding sensor arrangement in a motor vehicle | |
| KR102298186B1 (ko) | Dsi 프로토콜에 기초하여 자동차 내 센서 장치를 작동시키는 방법 | |
| US20100262736A1 (en) | Communication method and master-slave system for a field bus configured according to the as-interface standard | |
| CN106134151A (zh) | 用于在无线的车辆网络中进行授权的方法 | |
| US9871559B2 (en) | Motor vehicle on-board power system and method for transmitting data signals in a motor vehicle on-board power system | |
| CN104885414A (zh) | 具有车辆通信总线的汽车和用于产生总线消息的方法 | |
| KR101886076B1 (ko) | 네트워크 제어기 관리 시스템 및 방법 | |
| KR101612834B1 (ko) | 차량 내 lin 통신에서의 lin id 자동 할당 및 설정 방법 및 그를 위한 장치 | |
| CN111142498A (zh) | 具有并行总线端口配置的传感器布线 | |
| US11424954B2 (en) | Method for operating a sensor arrangement in a motor vehicle on the basis of a DSI protocol | |
| EP4059206B1 (en) | Data communication network in a vehicle | |
| KR101899967B1 (ko) | 차량의 네트워크 제어기 감시 방법 | |
| EP1050826A1 (en) | Method for operating a communication system on a serial bus | |
| CN111555946A (zh) | 总线系统的用户站和在总线系统中的数据传输的方法 | |
| KR101593338B1 (ko) | 차량의 lin 통신 장치 및 그 제어 방법 | |
| KR101899964B1 (ko) | 차량의 네트워크 제어기 감시 방법 | |
| JP5128089B2 (ja) | 車載データベース分配ノード、電子制御ユニットおよび車載データベースシステム | |
| KR101899966B1 (ko) | 차량의 네트워크 제어기 감시 방법 | |
| WO2022163279A1 (ja) | 補助電源システム、モジュール、補助電源制御方法、及びプログラム | |
| KR101899968B1 (ko) | 차량의 네트워크 제어기 감시 방법 | |
| KR101899965B1 (ko) | 차량의 네트워크 제어기 감지 방법 | |
| JP2009171138A (ja) | 個体情報記憶システム、個体情報記憶方法、ノード、及び検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |