KR20180120164A - 무선 로컬 영역 네트워크 레인징 및 방향 탐지를 위한 유니캐스트 및 브로드캐스트 프로토콜 - Google Patents
무선 로컬 영역 네트워크 레인징 및 방향 탐지를 위한 유니캐스트 및 브로드캐스트 프로토콜 Download PDFInfo
- Publication number
- KR20180120164A KR20180120164A KR1020187024522A KR20187024522A KR20180120164A KR 20180120164 A KR20180120164 A KR 20180120164A KR 1020187024522 A KR1020187024522 A KR 1020187024522A KR 20187024522 A KR20187024522 A KR 20187024522A KR 20180120164 A KR20180120164 A KR 20180120164A
- Authority
- KR
- South Korea
- Prior art keywords
- frame
- sta
- ftm
- information
- cbf
- Prior art date
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/76—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted
- G01S13/765—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted with exchange of information between interrogator and responder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/023—Monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0246—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves involving frequency difference of arrival or Doppler measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/12—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves by co-ordinating position lines of different shape, e.g. hyperbolic, circular, elliptical or radial
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/26—Systems using multi-frequency codes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/0091—Signaling for the administration of the divided path
- H04L5/0092—Indication of how the channel is divided
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
- H04W64/006—Locating users or terminals or network equipment for network management purposes, e.g. mobility management with additional information processing, e.g. for direction or speed determination
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/06—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station
- H04B7/0613—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station using simultaneous transmission
- H04B7/0615—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station using simultaneous transmission of weighted versions of same signal
- H04B7/0617—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station using simultaneous transmission of weighted versions of same signal for beam forming
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/06—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station
- H04B7/0613—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station using simultaneous transmission
- H04B7/0615—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station using simultaneous transmission of weighted versions of same signal
- H04B7/0619—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station using simultaneous transmission of weighted versions of same signal using feedback from receiving side
- H04B7/0636—Feedback format
- H04B7/0643—Feedback on request
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/06—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station
- H04B7/0686—Hybrid systems, i.e. switching and simultaneous transmission
- H04B7/0695—Hybrid systems, i.e. switching and simultaneous transmission using beam selection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/26—Systems using multi-frequency codes
- H04L27/2601—Multicarrier modulation systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/0001—Arrangements for dividing the transmission path
- H04L5/0014—Three-dimensional division
- H04L5/0023—Time-frequency-space
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/003—Arrangements for allocating sub-channels of the transmission path
- H04L5/0048—Allocation of pilot signals, i.e. of signals known to the receiver
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W16/00—Network planning, e.g. coverage or traffic planning tools; Network deployment, e.g. resource partitioning or cells structures
- H04W16/24—Cell structures
- H04W16/28—Cell structures using beam steering
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W76/00—Connection management
- H04W76/10—Connection setup
- H04W76/14—Direct-mode setup
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mobile Radio Communication Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Radio Transmission System (AREA)
Abstract
개시된 실시예들은 무선으로 네트워킹된 디바이스들 간에, 레인징 및 방향 탐지를 포함하는 무선 채널 교정을 가능하게 한다. 일부 실시예들에서, 제1 STA(station) 상에서의 방법은: 제1 NDPA 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하는 단계 ― 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 또는 각도 정보를 포함한다는 것을 표시하는 제1 비트를 포함함 ― ; 및 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하는 단계를 포함할 수 있다. 제2 프레임은 NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 NDP_az 프레임, 또는 NDP(Null Data Packet) 프레임, 또는 BRP(Beam Refinement Protocol) 프레임 중 하나일 수 있다. 제1 NDPA 프레임은 유니캐스팅, 멀티캐스팅 또는 브로드캐스팅될 수 있다.
Description
[0001]
본 출원은 2016년 2월 28일에 출원된 명칭이 "Unicast and Broadcast Protocol for Wireless Local Area Network Ranging and Direction Finding"인 미국 가특허 출원 제62/300,879 호, 및 2016년 2월 28일에 출원된 명칭이 "Unicast and Broadcast Protocol for Wireless Local Area Network Ranging and Direction Finding"인 미국 가특허 출원 제62/300,884 호뿐만 아니라 2016년 6월 23일에 출원된 명칭이 "Unicast and Broadcast Protocol for Wireless Local Area Network Ranging and Direction Finding"인 미국 정식 출원 제15/191,493 호의 이점 및 우선권을 주장하고, 상기 출원들은 본원의 양수인에게 양도되고, 전체 내용들이 인용에 의해 본원에 통합된다.
[0002]
본원에 개시된 요지는 무선 통신에 관한 것이며, 상세하게는, 무선 통신 시스템들에서의 사운딩, 레인징 및/또는 방향 탐지를 위한 유니캐스트, 멀티캐스트 및/또는 브로드캐스트 프로토콜에 관한 것이다.
[0003]
사용자 장비(UE), 이를테면, 모바일 단말, 셀룰러 폰 또는 다른 모바일 디바이스에 대한 포지셔닝 기능들을 수행하는 것이 종종 바람직하다. "위치" 및 "포지션"이라는 용어들은 동의어이고 본원에서 상호 교환 가능하게 사용된다. 예컨대, IEEE 802.11 표준에 기반한 무선 시스템에서, 포지셔닝은 액세스 포인트(AP)와 사용자 장비(UE) 사이의 RTT(Round Trip Time) 측정들을 사용하여 수행될 수 있고, 사용자 장비(UE)는 모바일 스테이션, 셀 폰, 웨어러블, 핸드헬드 컴퓨팅 디바이스 또는 일부 다른 사용자 디바이스 형태를 취할 수 있다.
[0004]
현대 무선 시스템들에서, 송신기 및 수신기에서의 다수의 안테나들은 MIMO(multiple input/multiple output)를 구현하는 데 사용될 수 있다. MIMO는, 다수의 공간 스트림들로 지칭되는 다수의 공간적으로 다중화된 데이터 신호들의 동시 전달을 가능하게 한다. 또한, "빔포밍(beamforming)"은 방향성 신호 송신 또는 수신을 위해 사용될 수 있다. 빔포밍에서, 위상 어레이 안테나 내의 엘리먼트들은, 일부 각도들에서 신호들이 보강 간섭(constructive interference)을 경험하는 반면에, 다른 신호들이 상쇄 간섭을 경험하도록 결합되어, 빔이 원하는 방향으로 "스티어링"될 수 있다. 빔포밍은 송신 및 수신 단부들에서 공간 선택성을 달성하는 데 사용될 수 있다. 따라서, 빔포밍 교정을 가능하게 하기 위한 기술들은 개선된 UE 위치 결정 및/또는 채널 특성화를 제공할 수 있다.
[0005]
개시된 실시예들은, RTT 결정 목적으로 각도 정보를 전송하기 위한 기존의 NDPA/NDP 교환들을 레버리지(leverage)함으로써 부분적으로 무선 STA들 간의 정보 교환을 가능하게 한다. 개시된 실시예들은 또한 CFI를 송신하기 위한 CBF 프레임들의 사용에 부분적으로 기반하여 무선 STA들 간의 정보 교환을 가능하게 한다. 위의 CBF, NDP 및/또는 NDPA 프레임들은, 일부 실시예들에서, 브로드캐스트 또는 멀티캐스트 방식으로 사용될 수 있다. 일부 실시예들에서, 통합된 프로토콜을 형성하기 위해 NDPA/NDP 프레임워크를 갖는 BRP 프레임들(예컨대, 60 GHz에서 사용됨)이 사용될 수 있다. 개시된 실시예들은 또한 대칭적인 RTT/AoA/AoD/방위각 교환을 가능하게 한다.
[0006]
일부 실시예들에서, 제1 STA(station) 상에서의 방법은: 제1 NDPA 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하는 단계 ― 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징(ranging) 또는 각도 정보를 포함한다는 것을 표시하는 제1 비트를 포함함 ― ; 및 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하는 단계를 포함할 수 있고, 제2 프레임은, NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 NDP_az 프레임, 또는 NDP(Null Data Packet) 프레임, 또는 BRP(Beam Refinement Protocol) 프레임 중 하나일 수 있다.
[0007]
추가의 양상에서, 제1 STA(station)는 메모리, 및 메모리에 커플링된 프로세서를 포함할 수 있고, 프로세서는: 제1 시간에서, 제1 NDPA 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하고 ― 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 또는 각도 정보를 포함한다는 것을 표시하는 제1 비트를 포함함 ― ; 그리고 제1 시간으로부터 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하도록 구성되고, 제2 프레임은: NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 NDP_az 프레임, 또는 NDP(Null Data Packet) 프레임, 또는 BRP(Beam Refinement Protocol) 프레임 중 하나이다.
[0008]
개시된 실시예들은 또한 제1 STA(station)에 관한 것이며, 제1 STA는: 제1 NDPA 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하기 위한 수단 ― 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 또는 각도 정보를 포함한다는 것을 표시하는 제1 비트를 포함함 ― ; 및 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하기 위한 수단을 포함하고, 제2 프레임은 NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 NDP_az 프레임, 또는 NDP(Null Data Packt) 프레임, 또는 BRP(Beam Refinement Protocol) 프레임 중 하나이다.
[0009]
다른 양상에서, 비-일시적인 컴퓨터-판독 가능 매체는, 제1 NDPA 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하고 ― 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 또는 각도 정보를 포함한다는 것을 표시하는 제1 비트를 포함함 ― ; 그리고 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하도록 프로세서에 의해 실행 가능한 프로그램 코드를 포함할 수 있고, 제2 프레임은 NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 NDP_az 프레임, 또는 NDP(Null Data Packet) 프레임, 또는 BRP(Beam Refinement Protocol) 프레임 중 하나이다.
[0010]
개시된 방법들은 다양한 프로토콜들을 사용하여 AP들, 비-AP STA들, UE들 등 중 하나 또는 그 초과에 의해 수행될 수 있다. 개시된 실시예들은 또한 비일시적인 컴퓨터 판독 가능 매체 또는 컴퓨터 판독 가능 메모리를 사용하여 프로세서들에 의해 생성, 저장, 액세스, 판독 또는 수정되는 소프트웨어, 펌웨어 및 프로그램 명령들에 관한 것이다.
[0011]
본 발명의 실시예들은, 도면들을 참조하여, 단지 예로서, 설명될 것이다.
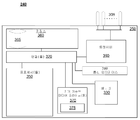
[0012] 도 1은 본원에 제시된 특정 실시예들에 따라, 무선 환경에서 유니캐스트, 멀티캐스트 및/또는 브로드캐스트를 포함하는 무선 통신, 및 무선 매체 특성화를 수행하도록 인에이블링되는 UE(100)로서 도시된 비-AP STA의 특정 예시적인 특징들을 예시하는 개략적인 블록도를 도시한다.
[0013] 도 2는 본원에 제시된 특정 실시예들에 따른 무선 통신 시스템(200)의 간략화된 아키텍처를 도시한다.
[0014] 도 3은 본원에 제시된 특정 실시예들에 따라, 무선 환경에서 유니캐스트, 멀티캐스트 및/또는 브로드캐스트를 포함하는 무선 통신, 및 무선 매체 특성화를 수행하도록 인에이블링되는 AP(240)를 예시하는 개략적인 블록도를 도시한다.
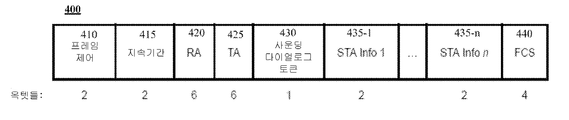
[0015] 도 4a는 본원에 제시된 특정 실시예들에 따른, 후속 NDP 프레임에 관한 정보를 갖는 예시적인 NDPA 프레임(400)을 도시한다.
[0016] 도 4b는 본원에 제시된 특정 실시예들에 따른, 2-비트 길이를 갖는 예비 서브필드(432) 및 사운딩 다이얼로그 토큰 넘버 서브필드(434)를 포함하는 사운딩 다이얼로그 토큰 필드(430)의 포맷을 도시한다.
[0017] 도 5a는 본원에 제시된 특정 실시예들에 따른, 개시자(510)(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 유니캐스트 메시지 흐름(500)을 도시한다.
[0018] 도 5b는 본원에 제시된 특정 실시예들에 따른, 개시자(552)(예컨대, AP(240))와 응답자 1(554)(예컨대, 비-AP STA/UE(100))로서 식별된 응답자 간의 예시적인 유니캐스트 메시지 흐름(550)을 도시한다.
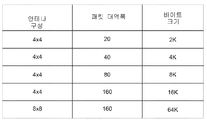
[0019] 도 5c는 상이한 안테나 구성들에 대해 하나의 STA로부터 다른 STA로 송신될 수 있는 CFI 데이터의 양을 도시한다.
[0020] 도 5d는 CBF(Compressed Beamforming Feedback) 프레임의 부분을 형성할 수 있는 VHT MIMO 제어 필드의 포맷을 도시한다.
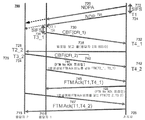
[0021] 도 5e는 일부 개시된 실시예들에 따른, NDPA(593)가 전송된 후속 프레임(NDP_az, NDP 또는 BRP)을 통보하는 유니캐스트 메시지 흐름(590)을 도시한다.
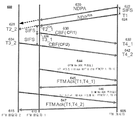
[0022] 도 6은 FTM 개시자(605)(예컨대 AP (240))와 2개의 FTM 응답자들, 즉, FTM 응답자 1(610) 및 FTM 응답자 2(615)(예컨대, UE들(100-1 및 100-2)) 간의 예시적인 메시지 흐름(600)을 도시하며, NDPA는 FTM 응답자 1 및 FTM 응답자 2 둘 모두에 브로드캐스팅된다.
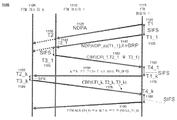
[0023] 도 7a는 개시자(705)(예컨대 AP(240))와 2개의 FTM 응답자들, 즉, 응답자 1(710) 및 응답자 2(715)(예컨대, UE들 또는 비-AP STA들(100-1 및 100-2)) 간의 예시적인 메시지 흐름(700)을 도시하며, NDPA는 응답자들, 즉, 응답자 1 및 응답자 2에 브로드캐스팅/멀티캐스팅된다.
[0024] 도 7b는 본원에 제시된 특정 실시예들에 따른 예시적인 빔포밍 보고 폴 프레임에 대한 포맷을 도시한다.
[0025] 도 8a는 본원에 제시된 특정 실시예들에 따른, AoA, AoD 및/또는 다른 정보를 포함할 수 있는 예시적인 FTM(Fine Timing Measurement) 프레임을 도시한다.
[0026] 도 8b 및 8c는 본원에 제시된 특정 실시예들에 따른 예시적인 AoA 필드(830) 및 AoD 필드(840)의 포맷들을 도시한다.
[0027] 도 8d는 FTM 확인응답(FTM Ack)에 대한 요청을 나타내는 예시적인 FTM(Fine Timing Measurement) No Ack 프레임(800)을 도시한다.
[0028] 도 8e는 반경 "r" 및 각도들 "세타" 및 "파이"를 사용하여 STA의 포지션을 나타내기 위한 예시적인 3-차원 좌표계(880)이다.
[0029] 도 9a는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 대칭적인 유니캐스트 메시지 흐름을 도시하고, FTM 프레임들은 CFI 필드를 포함한다.
[0030] 도 9b는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 유니캐스트 메시지 흐름을 도시하고, 여기서 FTM 프레임들은 CFI 필드, AoA(Angle of Arrival) 필드 및/또는 AoD(Angle of Departure) 필드 및/또는 방위각(azimuth) 필드 및/또는 범위(Range) 필드를 포함한다.
[0031] 도 9c는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 대칭적인 메시지 흐름을 도시하고, 여기서 NDPA는 브로드캐스트 NDP를 통보하고, FTM 프레임들은 AoA(Angle of Arrival) 필드 및/또는 AoD(Angle of Departure) 필드를 포함한다.
[0032] 도 10은, FTM 응답자가 정보를 공유하지 않고 개시자들이 다수인 멀티캐스트 비-대칭적인 메시지 흐름(1000)을 도시한다.
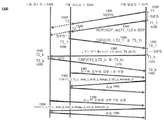
[0033] 도 11은, FTM 응답자가 정보를 공유하고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1100)을 도시한다.
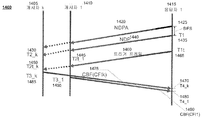
[0034] 도 12는, 레인징 비트가 설정되고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1200)을 도시한다.
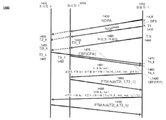
[0035] 도 13은, 레인징 비트가 설정되지 않고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1300)을 도시한다.
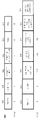
[0036] 도 14a는, 모든 개시자들에 대한 정보가 SIFS 인터벌 내에서 수신되고 개시자들이 다수인 멀티캐스트 대칭적인 OFDMA(Orthogonal Frequency Division Multiple Access) 또는 다운링크 다중 사용자 MIMO 메시지 흐름(1400)을 도시한다.
[0037] 도 14b는, 모든 개시자들에 대한 정보가 SIFS 인터벌 내에서 수신되고 개시자들이 다수인 멀티캐스트 대칭적인 OFDMA(Orthogonal Frequency Division Multiple Access) 또는 다운링크 다중 사용자 MIMO 메시지 흐름(1487)을 도시한다.
[0038] 도 15는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, 제1 STA)와 응답자(하나 또는 그 초과의 제2 STA들/UE들) 간의 메시지 흐름을 위한 방법(1500)을 예시하는 예시적인 흐름도를 도시한다.
[0012] 도 1은 본원에 제시된 특정 실시예들에 따라, 무선 환경에서 유니캐스트, 멀티캐스트 및/또는 브로드캐스트를 포함하는 무선 통신, 및 무선 매체 특성화를 수행하도록 인에이블링되는 UE(100)로서 도시된 비-AP STA의 특정 예시적인 특징들을 예시하는 개략적인 블록도를 도시한다.
[0013] 도 2는 본원에 제시된 특정 실시예들에 따른 무선 통신 시스템(200)의 간략화된 아키텍처를 도시한다.
[0014] 도 3은 본원에 제시된 특정 실시예들에 따라, 무선 환경에서 유니캐스트, 멀티캐스트 및/또는 브로드캐스트를 포함하는 무선 통신, 및 무선 매체 특성화를 수행하도록 인에이블링되는 AP(240)를 예시하는 개략적인 블록도를 도시한다.
[0015] 도 4a는 본원에 제시된 특정 실시예들에 따른, 후속 NDP 프레임에 관한 정보를 갖는 예시적인 NDPA 프레임(400)을 도시한다.
[0016] 도 4b는 본원에 제시된 특정 실시예들에 따른, 2-비트 길이를 갖는 예비 서브필드(432) 및 사운딩 다이얼로그 토큰 넘버 서브필드(434)를 포함하는 사운딩 다이얼로그 토큰 필드(430)의 포맷을 도시한다.
[0017] 도 5a는 본원에 제시된 특정 실시예들에 따른, 개시자(510)(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 유니캐스트 메시지 흐름(500)을 도시한다.
[0018] 도 5b는 본원에 제시된 특정 실시예들에 따른, 개시자(552)(예컨대, AP(240))와 응답자 1(554)(예컨대, 비-AP STA/UE(100))로서 식별된 응답자 간의 예시적인 유니캐스트 메시지 흐름(550)을 도시한다.
[0019] 도 5c는 상이한 안테나 구성들에 대해 하나의 STA로부터 다른 STA로 송신될 수 있는 CFI 데이터의 양을 도시한다.
[0020] 도 5d는 CBF(Compressed Beamforming Feedback) 프레임의 부분을 형성할 수 있는 VHT MIMO 제어 필드의 포맷을 도시한다.
[0021] 도 5e는 일부 개시된 실시예들에 따른, NDPA(593)가 전송된 후속 프레임(NDP_az, NDP 또는 BRP)을 통보하는 유니캐스트 메시지 흐름(590)을 도시한다.
[0022] 도 6은 FTM 개시자(605)(예컨대 AP (240))와 2개의 FTM 응답자들, 즉, FTM 응답자 1(610) 및 FTM 응답자 2(615)(예컨대, UE들(100-1 및 100-2)) 간의 예시적인 메시지 흐름(600)을 도시하며, NDPA는 FTM 응답자 1 및 FTM 응답자 2 둘 모두에 브로드캐스팅된다.
[0023] 도 7a는 개시자(705)(예컨대 AP(240))와 2개의 FTM 응답자들, 즉, 응답자 1(710) 및 응답자 2(715)(예컨대, UE들 또는 비-AP STA들(100-1 및 100-2)) 간의 예시적인 메시지 흐름(700)을 도시하며, NDPA는 응답자들, 즉, 응답자 1 및 응답자 2에 브로드캐스팅/멀티캐스팅된다.
[0024] 도 7b는 본원에 제시된 특정 실시예들에 따른 예시적인 빔포밍 보고 폴 프레임에 대한 포맷을 도시한다.
[0025] 도 8a는 본원에 제시된 특정 실시예들에 따른, AoA, AoD 및/또는 다른 정보를 포함할 수 있는 예시적인 FTM(Fine Timing Measurement) 프레임을 도시한다.
[0026] 도 8b 및 8c는 본원에 제시된 특정 실시예들에 따른 예시적인 AoA 필드(830) 및 AoD 필드(840)의 포맷들을 도시한다.
[0027] 도 8d는 FTM 확인응답(FTM Ack)에 대한 요청을 나타내는 예시적인 FTM(Fine Timing Measurement) No Ack 프레임(800)을 도시한다.
[0028] 도 8e는 반경 "r" 및 각도들 "세타" 및 "파이"를 사용하여 STA의 포지션을 나타내기 위한 예시적인 3-차원 좌표계(880)이다.
[0029] 도 9a는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 대칭적인 유니캐스트 메시지 흐름을 도시하고, FTM 프레임들은 CFI 필드를 포함한다.
[0030] 도 9b는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 유니캐스트 메시지 흐름을 도시하고, 여기서 FTM 프레임들은 CFI 필드, AoA(Angle of Arrival) 필드 및/또는 AoD(Angle of Departure) 필드 및/또는 방위각(azimuth) 필드 및/또는 범위(Range) 필드를 포함한다.
[0031] 도 9c는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 대칭적인 메시지 흐름을 도시하고, 여기서 NDPA는 브로드캐스트 NDP를 통보하고, FTM 프레임들은 AoA(Angle of Arrival) 필드 및/또는 AoD(Angle of Departure) 필드를 포함한다.
[0032] 도 10은, FTM 응답자가 정보를 공유하지 않고 개시자들이 다수인 멀티캐스트 비-대칭적인 메시지 흐름(1000)을 도시한다.
[0033] 도 11은, FTM 응답자가 정보를 공유하고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1100)을 도시한다.
[0034] 도 12는, 레인징 비트가 설정되고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1200)을 도시한다.
[0035] 도 13은, 레인징 비트가 설정되지 않고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1300)을 도시한다.
[0036] 도 14a는, 모든 개시자들에 대한 정보가 SIFS 인터벌 내에서 수신되고 개시자들이 다수인 멀티캐스트 대칭적인 OFDMA(Orthogonal Frequency Division Multiple Access) 또는 다운링크 다중 사용자 MIMO 메시지 흐름(1400)을 도시한다.
[0037] 도 14b는, 모든 개시자들에 대한 정보가 SIFS 인터벌 내에서 수신되고 개시자들이 다수인 멀티캐스트 대칭적인 OFDMA(Orthogonal Frequency Division Multiple Access) 또는 다운링크 다중 사용자 MIMO 메시지 흐름(1487)을 도시한다.
[0038] 도 15는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, 제1 STA)와 응답자(하나 또는 그 초과의 제2 STA들/UE들) 간의 메시지 흐름을 위한 방법(1500)을 예시하는 예시적인 흐름도를 도시한다.
[0039]
개시된 실시예들은 디바이스들 간의 무선 통신을 가능하게 한다. 일부 실시예들에서, 무선 통신은 채널 교정(channel calibration)을 보조하는 프로토콜들 또는 프로토콜들에 대한 수정들의 사용을 통해 가능하게 된다. 일부 실시예들에서, 채널 교정은 사운딩, 레인징 및/또는 방향 탐지에 관련된 측정들을 수행하는 것을 포함할 수 있다. 일부 실시예들에서, 개시된 기술들은 디바이스들 간의 레인징 및 방향 탐지를 가능하게 하기 위해 무선 환경들에서 사용될 수 있다. 무선 네트워크 디바이스들의 세트에서, 개시된 실시예들은 2개의 디바이스들(1 대 1) 사이 및/또는 멀티캐스트(1 대 다) 및/또는 브로드캐스트(1 대 전부) 디바이스들 사이의 레인징 및/또는 방향 탐지를 가능하게 할 수 있다. "유니캐스트"라는 용어는 STA로부터 단일 디바이스로의 신호들의 송신을 나타내기 위해 사용되는 반면에, "멀티캐스트"라는 용어는 STA로부터 복수의 디바이스들로의 신호들의 송신을 나타내기 위해 사용된다. "브로드캐스트"라는 용어는 STA로부터, 전송된 신호를 수신하도록 인가되고 그리고/또는 이를 수신할 수 있는 모든 디바이스들로의 신호들의 송신을 지칭하는 데 사용된다.
[0040]
현대 무선 시스템들에서, 송신기 및 수신기에서의 다수의 안테나들은 MIMO(multiple input/multiple output)를 구현하는 데 사용될 수 있다. MIMO는, 다수의 공간 스트림들로 지칭되는 다수의 공간적으로 다중화된 데이터 신호들의 동시 전달을 가능하게 한다. 또한, 다중-사용자 MIMO(MU-MIMO)에서, AP는 다수의 클라이언트 UE들에 동시에 송신할 수 있고, 빔포밍(beamforming)은 방향성 신호 송신 또는 수신을 위해 사용될 수 있다. MU-MIMO에서, "다운링크"라는 용어는 AP로부터 하나 또는 그 초과의 UE들로의, 동시에 발생할 수 있는 (AP에 의해 송신되는) 통신을 지칭하는 반면에, "업링크"라는 용어는 하나 또는 그 초과의 UE들로부터 AP로의, 동시에 발생할 수 있는 (AP에 의해 수신되는) 통신을 지칭한다.
[0041]
빔포밍에서, 위상 어레이 안테나 내의 엘리먼트들은, 일부 각도들의 신호들이 보강 간섭(constructive interference)을 경험하는 반면에 다른 신호들이 상쇄 간섭(destructive interference)을 경험하도록 결합된다. 빔포밍은 송신 및 수신 단부들에서 공간 선택성을 달성하는 데 사용될 수 있다. 예컨대, 802.11ac에서, AP는, 송신을 지향시키는 방법을 결정하기 위해 NDPA(Null Data Packet Announcement)를 사용할 수 있고, NPDA는 NDP(Null Data Packet)가 바로 후속될 수 있다. NDP는 데이터가 없지만 포맷이 알려진 물리 계층(PHY) 프레임일 수 있고, 채널을 교정하는 데 사용될 수 있다. 예컨대, NDP를 수신하는 UE(들)(수신기들)는, 채널에 관한 일부 정보를 제공하는 "빔포밍 매트릭스(beamforming matrix)"로 응답할 수 있다. 정보는 후속 송신들을 포커싱하기 위해 AP(송신기)에 의해 사용될 수 있다.
[0042]
그러나, 빔포밍 매트릭스가 일부 채널 관련 정보를 포함할 수 있지만, 기존의 빔포밍 매트릭스는 AoA(Angle of Arrival), AoD(Angle of Departure), 방위각, CFR(Channel Frequency Response), CIR(Channel Impulse Response), PDP(Power Delay Profile), FAC(First Arrival Correction) 및/또는 통신하는 STA들 간의 다른 채널 교정 메트릭들에 관한 정보를 포함하지 않는다. 또한, 위의 정보는 빔포밍 매트릭스로부터 유도될 수 없다. 따라서, 위의 정보를 획득하기 위해 부가적인 레인징/사운딩 메시지 교환들이 종종 사용되고, 이로써 시스템 성능 메트릭들에 불리하게 영향을 줄 수 있는 시스템 오버헤드 및 레이턴시를 증가시킨다.
[0043]
일부 개시된 실시예들은, 개선된 UE 위치 결정 및/또는 채널 특성화(characterization)를 가능하게 하는 빔포밍 교정 기술들에 관련된다. 또한, 개시된 실시예들은 또한 다수의 송신 체인들의 사용을 가능하게 한다. 예컨대, 일부 개시된 실시예들은, 다수의 송신 체인들의 활용을 가능하게 하기 위해 NDP(Null Data Packet) 프레임 구조를 이용할 수 있다. 또한, 개시된 실시예들은 AoA(Angle of Arrival), AoD(Angle of Departure), 방위각, CFR(Channel Frequency Response), CIR(Channel Impulse Response), PDP(Power Delay Profile), FAC(First Arrival Correction) 및/또는 2개의 통신하는 STA들 간의 다른 채널 교정 파라미터들/메트릭들 중 하나 또는 그 초과를 포함하는 정보의 교환을 위한 기술들을 제공하고, 이들은 또한 본원에서 "채널 교정 파라미터들", "채널 교정 메트릭들" 또는 "채널 특성화 정보"로 지칭된다. 일부 실시예들에서, 위의 채널 교정 파라미터들/메트릭들은, 통신하는 STA들 사이에서 프레임 교환들이 더 적게 결정되고 교환될 수 있다. 예컨대, 일부 실시예들에서 프레임 구조 및/또는 프레임들 내의 정보 엘리먼트들 및/또는 메시지 교환 프로토콜들 중 하나 또는 그 초과는 교정 파라미터들/메트릭들을 결정하고 그리고/또는 교환하도록 레버리지(leverage)될 수 있다. 예시적인 실시예들이 본원에 추가로 설명된다. 개시된 기술들은 또한 마이크로-위치들(micro-locations)의 결정을 포함하는 위치 결정을 가능하게 하는 데 사용될 수 있다. 일부 실시예들에서, 위치 결정은 위의 채널 교정 파라미터들 중 하나 또는 그 초과에 기반할 수 있다. 예컨대, 개시된 기술들은, 상점 내의 원하는 제품을 포함하는 선반으로 사용자를 향하게 할 수 있는, UE 상의 애플리케이션에서 구현될 수 있다. 다른 예들로서, 개시된 기술들은 감시 카메라들(surveillance cameras) 및/또는 드론 내비게이션(drone navigation)에 사용될 수 있다. 본원에 설명된 예시적인 메시지 흐름들, 프레임 포맷들 및/또는 정보 엘리먼트들은 일부 802.11 표준들에서 알려진 규격들, 다이어그램들 및 지침들과, 일부 측면들에서, 호환 가능할 수 있다.
[0044]
"AoA(Angle of Arrival)”라는 용어는 안테나 어레이의 배향에 대해 안테나 어레이에 입사하는 라디오-주파수 파의 전파 방향을 지칭한다. 일 예로서, AoA는 안테나 어레이의 개별 엘리먼트들에서 수신된 라디오 파의 TDOA(Time Difference of Arrival) 또는 위상 차 측정들에 기반하여 결정될 수 있다. 반대로, "AoD(Angle of Departure)"라는 용어는 안테나 어레이의 배향에 대해 안테나 어레이로부터 송신된 라디오-주파수 파의 전파 방향을 지칭한다. 일부 실시예들에서, AoA 및 AoD는 다른 STA와 교환되는 신호들에 기반하여 STA에 의해 결정될 수 있다. 예컨대, 수신기와 같은 STA는 다른 STA와 교환되는 신호들에 기반하여 AoA 및 AoD를 분석(resolve)할 수 있다.
[0045]
임의의 적절한 기술은 응답자 디바이스에 의해 수신된 프레임들의 AoA 정보를 추정하고 그리고/또는 응답자 디바이스로부터 송신된 프레임들에 대한 AoD 정보를 추정하는 데 사용될 수 있다. 적어도 일부 실시예들에서, 응답자 디바이스는, 개시자 디바이스로부터 수신된 프레임들의 AoA 정보를 추정할 때, 다수의 상이한 안테나 패턴들을 사용할 수 있다. 더 구체적으로, 응답자 디바이스가 다수(N ≥ 2)의 안테나들을 포함할 때, 응답자 디바이스는 안테나들의 상이한 조합들을 선택적으로 인에이블링하고, 대응하는 수의 상이한 안테나 패턴들에 대한 채널 조건들을 추정할 수 있다. 각도 정보는 상관관계(correlation); 최대 우도 추정(maximum likelihood estimation); 이를테면, Root-MUSIC(Multiple Signal Classification), 사이클릭 MUSIC 또는 스무스 MUSIC를 포함하는 MUSIC 기술들; ESPRIT(Estimation of Signal Parameters using Rotational Invariance Techniques); 매트릭스 펜슬(Matrix Pencil) 등을 포함하지만, 이에 제한되지 않는 다양한 기술들을 사용하여 획득될 수 있다.
[0046]
제i 송신(Tx) 안테나 및 제j 수신(Rx) 안테나에 대한 CFR이라는 용어는 또한 톤 k에 대해  로 표기된다.
로 표기된다.  으로 표기되는 CIR이라는 용어는 제i Tx 안테나 및 제j Rx 안테나에 대한 CFR의 역고속 푸리에 변환(inverse Fast Fourier Transform)을 나타낸다. 일부 실시예들에서, 2개의 통신하는 STA들 사이에서 교환되는 정보는, 최초 도착 정보를 캡처할 수 있는, CIR(CIR') 내의 정보의 서브세트를 포함할 수 있다. CIR'의 길이는 최초 도착 정보의 추정의 정확도의 함수일 수 있다. CFI(Channel Feedback Information)라는 용어는 본원에서 CFR 또는 CIR 또는 CIR' 또는 PDP 또는 FAC를 지칭하는 데 사용된다. 예컨대, CBF(Compressed Beamforming) 프레임 또는 다른 프레임은 CFI 필드를 포함할 수 있다. CFI 필드는 CFR(Channel Frequency Response) 정보, 또는 CIR(Channel Impulse Response) 정보, 또는 최초 도착 정보를 갖는 CIR 정보의 서브세트, 또는 PDP(Power Delay Profile) 정보, 또는 FAC(First Arrival Correction) 정보 중 하나 또는 그 초과를 포함할 수 있다. PDP는 시간 지연의 함수로서 다중경로 채널을 통해 수신되는 신호 세기의 척도(measure)이다. FAC 시간 정보는 2개의 STA들 간의 통신들의 타이밍에서 더 큰 정확성을 가능하게 하고, 이는 포지셔닝 애플리케이션들에서 품질을 개선할 수 있다.
으로 표기되는 CIR이라는 용어는 제i Tx 안테나 및 제j Rx 안테나에 대한 CFR의 역고속 푸리에 변환(inverse Fast Fourier Transform)을 나타낸다. 일부 실시예들에서, 2개의 통신하는 STA들 사이에서 교환되는 정보는, 최초 도착 정보를 캡처할 수 있는, CIR(CIR') 내의 정보의 서브세트를 포함할 수 있다. CIR'의 길이는 최초 도착 정보의 추정의 정확도의 함수일 수 있다. CFI(Channel Feedback Information)라는 용어는 본원에서 CFR 또는 CIR 또는 CIR' 또는 PDP 또는 FAC를 지칭하는 데 사용된다. 예컨대, CBF(Compressed Beamforming) 프레임 또는 다른 프레임은 CFI 필드를 포함할 수 있다. CFI 필드는 CFR(Channel Frequency Response) 정보, 또는 CIR(Channel Impulse Response) 정보, 또는 최초 도착 정보를 갖는 CIR 정보의 서브세트, 또는 PDP(Power Delay Profile) 정보, 또는 FAC(First Arrival Correction) 정보 중 하나 또는 그 초과를 포함할 수 있다. PDP는 시간 지연의 함수로서 다중경로 채널을 통해 수신되는 신호 세기의 척도(measure)이다. FAC 시간 정보는 2개의 STA들 간의 통신들의 타이밍에서 더 큰 정확성을 가능하게 하고, 이는 포지셔닝 애플리케이션들에서 품질을 개선할 수 있다.
[0047]
스테이션 또는 "STA"라는 용어는 무선 네트워크에 커플링된 MAC(Medium Access Control) 식별자를 갖는 디바이스를 지칭할 수 있다. STA는 무선 매체에 대한 MAC(medium access control) 및 PHY(physical layer) 인터페이스의 단일 어드레싱 가능한 인스턴스인 로지컬 엔티티로서 보여질 수 있다. STA는, 모바일 스테이션, 셀룰러 폰과 같은 디바이스들, 또는 웨어러블 디바이스, 랩톱, 핸드헬드, 태블릿 등과 같은 컴퓨팅 디바이스, 또는 무선 네트워크에 커플링된 다른 엔티티를 지칭하는 비-AP STA의 형태를 취할 수 있다. STA는 또한, 하나 또는 그 초과의 비-AP STA들에 무선 연결을 제공하는 AP들을 지칭하는 액세스 포인트 STA(AP STA)의 형태를 취할 수 있다. AP STA는 하나 또는 그 초과의 비-AP 디바이스들 및/또는 다른 AP STA들과 통신할 수 있다. 일부 사례들에서, 아래의 설명에서, STA는 또한, 개시된 시퀀스에 응답하는 STA와, 이벤트들의 시퀀스를 개시하는 STA를 구별하기 위한 설명을 용이하게 하기 위해 "개시자" 또는 "응답자"로 지칭될 수 있다. "STA"는 "개시자"와 "응답자" 둘 모두로 기능할 수 있다. STA들은 이동식이거나 고정식일 수 있다.
[0048]
STA는 또한 셀룰러 또는 다른 무선 통신 디바이스, PCS(personal communication system) 디바이스, PND(personal navigation device), PIM(Personal Information Manager), PDA(Personal Digital Assistant), 랩톱, 또는 무선 통신 및/또는 내비게이션 신호들을 수신할 수 있는 다른 적절한 모바일 디바이스와 같은 "UE(user equipment)" 또는 "모바일 스테이션"의 형태를 취할 수 있다. UE라는 용어는 또한, 위성 신호 수신, 보조 데이터 수신 및/또는 포지션-관련 프로세싱이 디바이스에서 발생하는지 또는 PND(personal navigation device)에서 발생하는지에 관계없이, 이를테면, 단거리 무선, 적외선, 유선 연결 또는 다른 연결에 의해 PND와 통신하는 디바이스를 포함하도록 의도된다.
[0049]
도 1은 본원에 제시된 특정 실시예들에 따라, MU-MIMO 환경에서 유니캐스트, 브로드캐스트를 포함하는 무선 통신, 및 무선 매체 특성화를 수행하도록 인에이블링되는 UE(100)로서 도시된 비-AP STA의 특정 예시적인 특징들을 예시하는 개략적인 블록도를 도시한다. 일부 실시예들에서, UE(100)는 손목 시계, 안경(spectacles) 등과 같은 웨어러블 사용자 디바이스의 형태를 취할 수 있으며, 여기서 UE(100)의 하나 또는 그 초과의 기능 컴포넌트들은 물리적으로 분리되지만, 다른 기능적 컴포넌트들에 동작 가능하게 커플링될 수 있다. 예컨대, 디스플레이(190)는 물리적으로 분리되지만, 프로세서(들)(150) 및/또는 UE(100)의 다른 기능적 유닛들에 동작 가능하게 커플링될 수 있다.
[0050]
UE(100)는, 예컨대, 하나 또는 그 초과의 프로세싱 유닛들 또는 프로세서(들)(150) 및 메모리(130)를 포함할 수 있다. UE(100)는 또한 무선 네트워크 인터페이스(105)를 포함할 수 있다. 일부 실시예들에서, 무선 네트워크 인터페이스는 송신기(112) 및 수신기(114)를 포함할 수 있다. 일부 실시예들에서, UE(100)는 컴퓨터 판독 가능 매체(160) 및 디스플레이(190)를 더 포함할 수 있다. 위의 컴포넌트들은 하나 또는 그 초과의 연결들(120)(예컨대, 버스들, 라인들, 섬유들, 링크들 등)을 사용하여 서로에 동작 가능하게 커플링될 수 있다. 특정 예시적인 구현들에서, UE(100)의 전부 또는 일부는 칩셋 등의 형태를 취할 수 있다. 또한, UE(100)는 선택적으로 다양한 타입들의 이미지들을 렌더링할 수 있는 스크린 또는 디스플레이(190)를 포함할 수 있다.
[0051]
일부 실시예들에서, 프로세서(들)(150)는 또한, MIMO/MU-MIMO를 사용한 신호 송신 및 수신을 위해 사용될 수 있는 하나 또는 그 초과의 안테나들(105)을 통해 무선 신호들을 수신할 수 있는 트랜시버(110)로부터 입력을 수신할 수 있다. 트랜시버(110)는, 예컨대, 하나 또는 그 초과의 타입들의 무선 통신 네트워크들을 통해 하나 또는 그 초과의 무선 신호들을 송신하도록 인에이블링되는 송신기(112) 및 하나 또는 그 초과의 타입들의 무선 통신 네트워크들을 통해 송신된 하나 또는 그 초과의 신호들을 수신하기 위한 수신기(114)를 포함할 수 있다. 예컨대, 트랜시버(110)는 IEEE 802.11 표준들에 기반할 수 있는 WLAN(Wireless Local Area Network), IEEE 802.15 표준들에 기반할 수 있는 WPAN(Wireless Personal Area Network) 및/또는 하나 또는 그 초과의 셀룰러 통신 표준들에 기반한 WAN(Wide Area Network)와 통신할 수 있다.
[0052]
프로세서(들)(150)는 하드웨어, 펌웨어 및 소프트웨어의 조합을 사용하여 구현될 수 있다. 일부 실시예들에서, 프로세서(들)(150)는, 독립적으로 및/또는 다른 STA들로부터의 수신된 데이터 또는 측정들과 함께 UE(100)에 의해 무선 측정들로부터 유도된 정보에 기반하여 포지션 결정 및/또는 위치 보조 기능들을 수행할 수 있다. 일부 실시예들에서, 프로세서(들)(150)는 단일 칩, 집적 회로 또는 패키지의 부분으로서 트랜시버(110) 및/또는 다른 컴포넌트들을 포함할 수 있다.
[0053]
프로세서(들)(150)는 TDOA(Time Difference of Arrival), RTT(Round Trip Time), RSSI(Received Signal Strength Indication), CFR, CIR, PDP, FAC 등을 포함하는 채널 특성화 정보를 결정하기 위해 수신된 신호들 및/또는 정보 중 일부 또는 전부를 사용할 수 있다. 무선 신호들이 이용 가능한 위치들에서, 포지션 결정은 채널 특성화 정보 및/또는 본원에 설명된 다양한 기술들에 부분적으로 기반하여 수행될 수 있다. 예컨대, RTT 측정들, TDOA, RSTD(Reference Signal Time Difference), AFLT(Advanced Forward Link Trilateralation), 하이브리드 기술들, RSSI(Received Signal Strength Indicator) 기반 측정들 및/또는 상기의 일부 조합을 포함하는 기술들은 포지션 결정을 위해 사용될 수 있다.
[0054]
일 예로서, 프로세서(들)(150)는, UE(100)와 하나 또는 그 초과의 다른 디바이스들 사이의 RTT 및/또는 거리를 결정하는 데 사용될 수 있는 신호들의 수신/도착의 시간(TOA) 및/또는 송신/출발의 시간(TOD)과 연관된 타임스탬프들을 결정, 기록 및/또는 수신할 수 있다. 또한, 본원에 설명된 AoA, AoD 및 다른 특성들 및 파라미터들은 UE(100)와 통신하는 디바이스들의 위치/마이크로-위치를 결정하거나 추정하는 데 사용될 수 있다. 일부 실시예들에서, 측정들 및/또는 측정들로부터 획득된 결과들은, 본원에 설명된 하나 또는 그 초과의 프로토콜들에 따라, 2개의 STA들 사이, 이를테면, UE(100)와 다른 디바이스 사이에서 교환되는 하나 또는 그 초과의 프레임들에 포함될 수 있다.
[0055]
본원에 설명된 엘리먼트들 및 방법들은 애플리케이션에 따라 다양한 수단들에 의해 구현될 수 있다. 예컨대, 이들 엘리먼트들 및 방법들은 하드웨어, 펌웨어, 소프트웨어 또는 이들의 임의의 조합으로 구현될 수 있다. 예컨대, 하드웨어 구현에 대해, 프로세서(들)(150)는 하나 또는 그 초과의 ASIC들(application specific integrated circuits), DSP들(digital signal processors), DSPD(digital signal processing devices), PLD들(programmable logic devices), FPGA들(field programmable gate arrays), 프로세서들, 제어기들, 마이크로-제어기들, 마이크로프로세서들, 전자 디바이스들, 본원에 설명된 기능들을 수행하도록 설계된 다른 전자 유닛들, 또는 이들의 조합 내에서 구현될 수 있다.
[0056]
펌웨어 및/또는 소프트웨어 구현에 대해, 방법들은 본원에 설명된 기능들을 수행하는 프로그램 코드, 마이크로코드, 절차들, 기능들 등을 사용하여 구현될 수 있다. 명령들을 유형적으로 포함하는 임의의 기계-판독가능 매체는 본원에서 설명되는 방법들을 구현하는 데 사용될 수 있다. 예컨대, 비-일시적인 컴퓨터 판독 가능 매체(160) 및/또는 메모리(130)에 저장될 수 있는 프로그램 코드는 프로세서(들)(150)에 의해 판독되고 실행될 수 있다.
[0057]
메모리는 프로세서(들)(150) 내에서 또는 프로세서(들)(150) 외부에서 구현될 수 있다. 본원에서 사용된 바와 같이, "메모리"라는 용어는 임의의 타입의 장기, 단기, 휘발성, 비휘발성, 또는 다른 메모리를 지칭하며, 메모리의 임의의 특정 타입 또는 메모리들의 개수, 또는 메모리가 저장되는 매체들의 타입으로 한정되는 것은 아니다. 메모리(130)는, 예컨대, 1차 메모리 및/또는 2차 메모리를 포함할 수 있다. 1차 메모리는, 예컨대, 랜덤 액세스 메모리, 판독 전용 메모리 등을 포함할 수 있다. 이러한 예에서 프로세서(들)(150)와 별개인 것으로 예시되지만, 1차 메모리의 부분 또는 전부가 프로세서(들)(150) 내에 제공되거나 이와 달리 콜로케이팅/커플링될 수 있다는 것이 이해되어야 한다. 펌웨어 및/또는 소프트웨어로 구현되는 경우, 기능들은 컴퓨터-판독 가능 매체, 이를테면, 매체(160) 및/또는 2차 메모리 상에 하나 또는 그 초과의 명령들 또는 프로그램 코드로서 저장될 수 있다. 예들은 컴퓨터 프로그램들로 그리고 프로그램들과 연관되거나 프로그램에 의해 사용되는 데이터로 인코딩된 컴퓨터 판독 가능 매체를 포함한다.
[0058]
컴퓨터-판독 가능 매체(160)는 물리 컴퓨터 저장 매체를 포함한다. 저장 매체는 컴퓨터에 의해 액세스될 수 있는 임의의 이용가능한 매체일 수 있다. 비제한적 예로서, 이러한 비-일시적인 컴퓨터-판독 가능 매체는 RAM, ROM, EEPROM, CD-ROM, 플래시 메모리, 또는 다른 광학 디스크 저장소, 자기 디스크 저장소 또는 다른 자기 저장 디바이스들, 또는 원하는 프로그램 코드를 명령들 및/또는 데이터 형태로 저장하는 데 사용될 수 있고 그리고 컴퓨터에 의해 액세스될 수 있는 임의의 다른 매체를 포함할 수 있고; 본원에 사용된 바와 같이, 디스크(disk) 및 디스크(disc)는 CD(compact disc), 레이저 디스크(laser disc), 광학 디스크(optical disc), DVD(digital versatile disc), 플로피 디스크(floppy disk) 및 블루-레이 디스크(blu-ray disc)를 포함하며, 여기서 디스크들(disks)은 일반적으로 데이터를 자기적으로 재생하는 반면에, 디스크들(discs)은 레이저들을 사용하여 광학적으로 데이터를 재생한다. 상기한 것들의 결합들이 또한 컴퓨터-판독가능 매체들의 범위 내에 포함되어야 한다.
[0059]
예컨대, 저장된 프로그램 코드를 포함하는 컴퓨터-판독 가능 매체는 본원에 제시된 특정 실시예들에 따라 MU-MIMO 환경에서 유니캐스트, 브로드캐스트를 포함하는 무선 통신 및 무선 매체/채널 특성화를 지원하기 위한 프로그램 코드를 포함할 수 있다. 프로그램 코드는 추가로, 사운딩, 레인징 및/또는 포지션 결정을 포함하는 무선 채널 특성화를 지원할 수 있다. 예컨대, 그 코드는 AFLT/RTT/RSSI/RSTD/TDOA/AoA/AoD 및 다른 위치 결정 기술들 및/또는 채널 특성화 중 하나 또는 그 초과를 지원할 수 있다.
[0060]
일부 실시예들에서, 명령들 및/또는 데이터는 통신 채널을 통해 제공될 수 있다. 예컨대, 통신 장치는, 명령들 및 데이터를 나타내는 신호들을 수신기(114)를 통해 수신할 수 있는 트랜시버(110)를 포함할 수 있다. 명령들 및 데이터는, 하나 또는 그 초과의 프로세서들로 하여금, 레인징 및/또는 포지션 결정을 포함하는, (예컨대, MU-MIMO 환경에서의) 무선 채널 특성화 및/또는 무선 통신을 구현하게 할 수 있다. 명령들 및 데이터는 또한 하나 또는 그 초과의 프로세서들로 하여금 본원에 요약된 기능들을 구현하게 할 수 있다.
[0061]
도 2는 본원에 제시된 특정 실시예들에 따른 무선 통신 시스템(200)의 간략화된 아키텍처를 도시한다. 시스템(200)은, WLAN(230)을 통해 통신할 수 있는 비-AP STA들, 이를테면, UE들(100-1 내지 100-n)(집합적으로 UE들(100)로 지칭됨) 및 AP STA들, 이를테면, AP들(240-1 내지 240-4)(집합적으로 STA들(240)로 지칭됨)을 포함할 수 있다. 일부 실시예들에서, UE들(100) 및 AP들(240)은 WLAN(230)을 통해 서버(250)와 통신할 수 있다. 시스템(200)이 몇몇의 UE들(100) 및 AP들(240)을 예시하지만, UE들(100) 및 AP들(240)의 수는 다양한 설계 파라미터들에 따라 변경될 수 있고, 더 적거나 더 많은 수의 UE들(100) 및/또는 AP들(240)을 포함할 수 있다. 일부 실시예들에서, 하나 또는 그 초과의 UE들(100) 및/또는 AP들(240)은 다중 안테나들을 포함할 수 있고, MU-MIMO를 포함하는 MIMO를 지원할 수 있다.
[0062]
일부 실시예들에서, UE들(100) 및 AP들(240)은 IEEE 802.11 또는 호환 가능한 표준들에 기반할 수 있는 WLAN 네트워크를 통해 통신할 수 있다. 일부 실시예들에서, UE들(100) 및 AP들(240)은 IEEE 802.11 표준들의 변형들을 사용하여 통신할 수 있다. 예컨대, UE들(100) 및 AP들(240)은, MIMO, MU-MIMO 및 다수의 공간 스트림들을 지원할 수 있는, 5GHz 대역 상에서 802.11ac를 사용하여 통신할 수 있다. 일부 실시예들에서, UE들(100) 및 AP들(240)은 위의 표준들 중 일부를 사용하여 통신할 수 있으며, 위의 표준들의 일부는 VHT(Very High High Throughput)(위에 표준들에 설명됨) 및 HEW(High Efficiency WLAN) 및/또는 표준화된 사운딩 및 피드백 메커니즘들을 갖는 빔포밍 중 하나 또는 그 초과를 추가로 지원할 수 있다. 일부 실시예들에서, UE들(100) 및/또는 AP들(240)은 레거시 디바이스들과의 통신을 위한 레거시 표준들을 추가적으로 지원할 수 있다.
[0063]
일부 실시예들에서, UE들(100) 및/또는 AP들(240)은 하나 또는 그 초과의 추가 네트워크들, 이를테면, 셀룰러 캐리어 네트워크, 위성 포지셔닝 네트워크, WPAN 액세스 포인트들 등(도 2에 도시되지 않음)과 연결될 수 있다. 일부 실시예들에서, UE들(100) 및/또는 AP들(240)은 WWAN(wireless wide area network)(도 2에 도시되지 않음)에 커플링될 수 있다. WWAN은 CDMA(Code Division Multiple Access) 네트워크, TDMA(Time Division Multiple Access) 네트워크, FDMA(Frequency Division Multiple Access) 네트워크, OFDMA(Orthogonal Frequency Division Multiple Access) 네트워크, SC-FDMA(Single-Carrier Frequency Division Multiple Access) 네트워크, LTE(Long Term Evolution), WiMax 등일 수 있다.
[0064]
CDMA 네트워크는 cdma2000, 광대역 CDMA(W-CDMA: Wideband-CDMA) 등과 같은 하나 또는 그 초과의 라디오 액세스 기술(RAT: radio access technology)들을 구현할 수 있다. cdma2000은 IS-95, IS-2000, 및 IS-856 표준들을 포함한다. TDMA 네트워크는 GSM(Global System for Mobile Communications), D-AMPS(Digital Advanced Mobile Phone System) 또는 몇몇의 다른 RAT를 구현할 수 있다. GSM, W-CDMA 및 LTE는 3GPP로부터의 문서들에 설명된다. cdma2000은 "3세대 파트너쉽 프로젝트 2(3GPP2)"로 명명된 콘소시엄으로부터의 문서들에서 설명된다. 3GPP 및 3GPP2 문서들은 공개적으로 입수가능하다.
[0065]
도 2에 예시된 바와 같이, UE(100)는 또한 네트워크(230) 및 네트워크(230)와 연관될 수 있는 AP들(240)을 통해 서버(250-1)와 통신할 수 있다. UE(100)는 포지션 결정을 위해 사용될 수 있는, AP들(240)부터의 신호들을 수신하고 측정할 수 있다. 일부 실시예들에서, AP들(240)은, WLAN(wireless local area network)일 수 있는 무선 통신 네트워크(230)의 부분을 형성할 수 있다. 예컨대, WLAN은 IEEE 802.11x 네트워크일 수 있다.
[0066]
이제 도 3에 대해 참조가 이루어지고, 도 3은 AP(240)를 예시하는 개략적인 블록도이다. 일부 실시예들에서, AP(240)는 (유니캐스트, 멀티캐스트 및 브로드캐스트를 포함하는) 무선 통신 및 무선 매체 특성화를 수행하도록 인에이블링될 수 있다. 예컨대, 무선 통신 및/또는 무선 매체 특성화는 본원에 제시된 특정 실시예들에 따라 MU-MIMO 환경에서 수행될 수 있다. 일부 실시예들에서, UE(100)는 AP(100)로서 기능할 수 있다.
[0067]
일부 실시예들에서, AP(240)는, 예컨대, 하나 또는 그 초과의 프로세서(들)(350), 메모리(330), 커플링된 저장소(360) 및 트랜시버(390)를 포함할 수 있고, 이들은 하나 또는 그 초과의 연결들(320)(예컨대, 버스들, 라인들, 섬유들, 링크들 등)을 사용하여 동작 가능하게 커플링된다. 트랜시버(390)는 IEEE 802.11 표준(또는 이의 변형들)에 기반할 수 있는 WLAN(Wireless Local Area Network), IEEE 802.15에 기반할 수 있는 WPAN(Wireless personal Area Network) 및/또는 하나 또는 그 초과의 셀룰러 통신 표준들에 기반한 WAN(Wide Area Network)과 통신할 수 있다. 일부 실시예들에서, 트랜시버(390)는 MIMO/MU-MIMO를 사용하여 신호 송신 및/또는 수신을 위해 사용될 수 있는 하나 또는 그 초과의 안테나들(305)에 커플링될 수 있다.
[0068]
일부 실시예들에서, AP(240)는 또한 SSID들(Service Set Identifiers), BSSID(basic service set identification), 네트워크 식별자들 및/또는 타이밍 정보와 같은 다양한 네트워크 구성 관련 정보를 획득하기 위해 통신 인터페이스(380)를 통해 유선 네트워크와 인터페이스할 수 있다. 프로세서(들)(350)는 특정 개시된 실시예들에 따라, CFI, TDOA, RTT, RSSI, CFR, CIR, PDP, 범위, AOA, AOD, 방위각 및 다른 채널 특성화 정보를 생성하기 위해 수신된 정보의 일부 또는 전부를 사용할 수 있다.
[0069]
프로세서(들)(350)는 하드웨어, 펌웨어 및 소프트웨어의 조합, 또는 이들의 임의의 조합을 사용하여 구현될 수 있다. 하드웨어 구현에 대해, 프로세싱 유닛(950)은, 하나 또는 그 초과의 ASIC들(application specific integrated circuits), DSP들(digital signal processors), DSPD들(digital signal processing devices), PLD들(programmable logic devices), FPGA들(field programmable gate arrays), 프로세서들, 제어기들, 마이크로-제어기들, 마이크로프로세서들, 전자 디바이스들, 본원에서 설명되는 기능들을 수행하도록 설계된 다른 전자 유닛들, 또는 이들의 조합 내에서 구현될 수 있다. 펌웨어 및/또는 소프트웨어 구현에 대해, 본 방법들은 본원에 설명된 기능을 수행하는 절차들, 기능들 등을 사용하여 구현될 수 있다.
[0070]
명령들을 유형적으로 포함하는 임의의 기계-판독가능 매체는 본원에서 설명되는 방법들을 구현하는 데 사용될 수 있다. 예컨대, 소프트웨어는, 제거가능 매체들을 포함하는, 비-일시적인 컴퓨터-판독가능 매체들(378)의 사용을 지원할 수 있는 제거 가능한 미디어 드라이브(370)에 저장될 수 있다. 프로그램 코드는 비-일시적인 컴퓨터 판독 가능 매체(378) 및/또는 메모리(330) 상에 상주할 수 있고, 프로세서들(350)에 의해 판독 및 실행될 수 있다. 예컨대, 저장된 프로그램 코드를 포함하는 컴퓨터-판독 가능 매체는, 본원에 제시된 특정 실시예들에 따라, 무선 통신(유니캐스트, 멀티캐스트 및 브로드캐스트를 포함함) 및/또는 무선 매체 특성화(MIMO/MU-MIMO를 포함함) 환경을 지원하기 위한 프로그램 코드를 포함할 수 있다. 메모리(330)는 프로세서들(350) 내에서 또는 프로세서들(350) 외부에서 구현될 수 있다.
[0071]
특정 구현들에서, 2차 메모리는 비-일시적 컴퓨터-판독 가능 매체(378)를 동작 가능하게 수용할 수 있거나, 그렇지 않다면 이에 커플링하도록 구성 가능할 수 있다. 이와 같이, 특정 예시적인 구현들에서, 본원에 제시된 방법들 및/또는 장치들은 컴퓨터 구현가능 명령들이 저장된 비-일시적 컴퓨터 판독가능 매체(378)를 포함할 수 있는 제거 가능한 미디어 드라이브(370)의 형태를 부분적으로 또는 전체적으로 취할 수 있고, 명령들은, 적어도 하나의 프로세싱 유닛(350)에 의해 실행되는 경우에, 본원에 설명된 메시지 흐름들 및 프로토콜들을 포함하는 예시적인 동작들의 부분들을 수행하도록 동작 가능하게 인에이블링될 수 있다.
[0072]
도 4a는 본원에 제시된 특정 실시예들에 따른, 후속 NDP 프레임에 관한 정보를 갖는 예시적인 NDPA 프레임(400)을 도시한다. 일부 실시예들에서, NDPA 프레임(400)은 "파트 11: 무선 LAN MAC(Medium Access Control) 및 PHY(Physical Layer) 규격", IEEE P802.11-REVmcTM/D5.0, 2016년 1월, 정보 기술 초안 표준 - 시스템 로컬과 대도시권 네트워크들 간의 전기 통신들 및 정보 교환 - 특정 요건들(이하 "WLAN MAC & PHY 규격")§8.3.1.20, 621-622에 정의된 802.11ac NDPA 프레임의 형태를 취할 수 있고, 이는 전체가 인용에 의해 본원에 통합된다.
[0073]
일부 실시예들에서, NDPA 프레임은 지속기간 필드(415), RA(Recipient Address) 필드(420), TA(Transmitter Address) 필드(425), 사운딩 다이얼로그 토큰(430), STA Info 필드(들)(435-1…435-n) 및 FCS 필드(440)를 포함할 수 있다. NDPA 프레임은 적어도 하나의 STA Info 필드를 포함한다. 이들 필드들은 WLAN MAC & PHY 규격 문서에서 추가로 설명된다.
[0074]
일부 실시예들에서, NDP 통보 프레임(예컨대, VHT NDPA)이 하나 초과의 STA Info 필드(435)를 포함할 때, NDP 통보 프레임의 RA 필드(420)는 브로드캐스트 어드레스로 설정될 수 있다. VHT NDP 통보 프레임이 단일 STA Info 필드(435)를 포함할 때, VHT NDP 통보 프레임의 RA 필드(420)는 VHT 빔포미의 MAC 어드레스로 설정될 수 있다. TA 필드는, 예컨대, VHT NDP 통보 프레임을 송신하는 UE(100)의 어드레스로 설정될 수 있다.
[0075]
사운딩 다이얼로그 토큰 필드(430)의 포맷이 도 4b에 도시되고, 2- 비트 길이를 갖는 예비 서브필드(432) 및 사운딩 다이얼로그 토큰 넘버 서브필드(434)를 포함한다. 사운딩 다이얼로그 토큰 필드의 사운딩 다이얼로그 토큰 넘버 서브필드는 NDPA 프레임(400)을 식별하기 위해 AP(빔포머)에 의해 선택된 값을 포함한다.
[0076]
일부 실시예들에서, 예비 서브필드(432)의 제1 비트는, 바로 후속하는 NDP가 레인징을 위해 사용되어야 한다는 것을 응답자에 나타내기 위해 개시자에 의해 사용될 수 있다. 일부 실시예들에서, 예비 서브필드(432)의 제2 비트는 대칭적인 레인징을 나타내기 위해, 일 측(예컨대, 개시자)이 (예컨대, 개시자에 의해 캡처 및/또는 결정된) 레인징 정보와 같은 정보를 기꺼이 공유한다는 것을 나타내기 위해 사용될 수 있다. 아래의 예시적인 실시예들에서, 레인징 및 대칭/비대칭적인 레인징을 위한 NDP 프레임들의 사용은 예비 서브필드(432)의 비트들을 적절하게 구성함으로써 표시될 수 있다. 일부 실시예들에서, NDPA 프레임(400) 내의 다른 정보 엘리먼트들 중 일부분들은: (i) 후속 NDP 프레임이 레인징을 위해 사용된다는 것; 및/또는 (ⅱ) 개시자가 레인징 및/또는 다른 측정된/결정된 채널 특성화 정보를 기꺼이 공유할 것이라는 것을 나타내기 위해 사용될 수 있다.
[0077]
일부 실시예들에서, 다수의 안테나들로부터 송신될 수 있는 NDP 프레임들은 AoA, AoD 및 다른 파라미터들을 결정하기 위해 레버리지될 수 있다. 일부 실시예들에서, AoA, AoD 및 다른 결정된 정보는 FTM 프레임에 포함될 수 있고, 이로써 위치 결정을 가능하게 한다. 일부 실시예들에서, AoA, AoD 및 RTT를 결정함으로써, 디바이스는 위치가 알려진 하나의 다른 디바이스와의 FTM 프레임들의 교환에 기반하여 자신의 3D 위치를 결정할 수 있고, 이로써 네트워크 트래픽을 감소시키고, 오버헤드를 낮추고 그리고/또는 더 빠른 포지션 결정을 가능하게 한다. 아래의 설명에서, 특정 레인징/사운딩 또는 다른 동작을 요청하는 STA는 동작의 "개시자"로 지칭될 수 있는 반면에, 레인징/사운딩 또는 다른 요청에 응답하는 STA는 동작의 "응답자"로 지칭될 수 있다.
[0078]
도 5a는 본원에 제시된 특정 실시예들에 따라 개시자(505)(예컨대, AP(240))와 응답자(예컨대, UE(100))(507) 사이의 레인징을 위한 예시적인 메시지 흐름(500)을 도시한다. 예컨대, 예비 서브필드(432)(도 4b)의 제1 비트는, 바로 후속하는 NDP 프레임(515)이 레인징을 위해 사용되어야 한다는 것을 응답자(507)에 나타내기 위해 개시자(505)에 의해 사용될 수 있다. 또한, NDPA 프레임(510)은 (유니캐스트를 나타내는) 단일 STA Info 필드(435)를 포함할 수 있고, RA 필드(420)는 응답자(507)의 어드레스로 설정될 수 있다. 도 5a에 도시된 예시적인 메시지 흐름(500)은, 일부 측면들에서, 예컨대, 일부 802.11 표준들에서 알려진 규격들, 다이어그램들 및 지침들과 일치할 수 있다.
[0079]
도 5a에 도시된 바와 같이, NDPA 프레임(510)은 개시자(505)에 의해 전송될 수 있다. NDPA 프레임(510)은, NDPA 프레임(510)의 송신의 종료로부터 측정된 SIFS(Short Interframe Space) 시간 인터벌(512)로 주어진 시간 인터벌 후에 시간 T1(513)에서 NDP 프레임(515)의 전송이 후속될 수 있다. 다음의 도면들에서 시간 인터벌들은 실척대로 도시되지는 않았다. NDP 프레임(512)은 시간 T2(514)에서 응답자(510)에 의해 수신될 수 있다. 시간 T1(513)은 개시자(505)에 의해 캡처될 수 있는 반면에, 시간 T2(514)는 응답자(510)에 의해 캡처될 수 있다.
[0080]
SIFS 인터벌은 관련 IEEE 802.11 표준들에 의해 제공되는 다양한 시간 지속기간 값들이다. SIFS 인터벌은, 예컨대, (예컨대, 요청 또는 다른 프레임을 수신하기 위한) 수신 모드로부터 (예컨대, 확인응답 또는 다른 프레임을 송신하기 위한) 송신 모드로 전환하는 시간을 지정할 수 있다.
[0081]
응답자(507)는 FTM(Fine Timing Measurement) 프레임(522)이 송신되는 제1 시간(T3)을 캡처하는 것에 응답할 수 있다. FTM 절차는 레인징 측정들을 위해, 예컨대, UE(예컨대, 비-AP STA)가 다른 STA(예컨대, AP STA)에 대한 자신의 범위를 획득하는 것을 위해 사용될 수 있다. FTM은 증가된 타임스탬프 분해능을 제공하는 데 사용될 수 있다. 일부 실시예들에서, 타임스탬프 분해능은 10 나노초 내지 100 피코초의 범위일 수 있다.
[0082]
또한, 일부 실시예들에서, FTM 프레임(522)은 이전에 수신된 NDP로부터의 AoA(Angle of Arrival) 및 AoD(Angle of Departure) 측정들 또는 다른 각도 측정들을 포함할 수 있다. 일부 실시예들에서, FTM 프레임(522)은 응답자(507)에 의해 수행되는 각도 컴퓨테이션들에 후속하는 시간에서 전송될 수 있다. 일부 실시예들에서, FTM 프레임(522)은 선택적으로, 아래에 추가로 요약되는 바와 같은 다양한 다른 측정된 파라미터들을 포함할 수 있다. 일부 실시예들에서, AoA 및 AoD는 NDP 및 NDPA 패킷 송신 동안에 획득된 측정들에 기반하여 (예컨대, 응답자(507)에 의해) 결정될 수 있다.
[0083]
FTM 프레임(522)의 수신의 종료로부터 측정된 SIFS 시간 인터벌 후에, 개시자(505)는, FTM 프레임이 개시자(505)에 도착하는 제2 시간 T4(524) 및 개시자(505)가 Ack 메시지(532)를 송신하는 제3 시간 T5(530)를 캡처하는 것에 Ack(Acknowledgment) 메시지(532)로 응답할 수 있다. 응답자(507)는 Ack 메시지(532)가 응답자(507)에 도착하는 제4 시간 T6(535)을 캡처할 수 있다.
[0084]
일부 실시예들에서, 응답자(510)는, 시간 T3(520), T6(535), AoA 및 AoD 정보를 포함할 수 있는 FTM 프레임(540)으로 Ack 메시지(532)에 응답할 수 있다. 일부 실시예들에서, FTM 프레임은 CFI(Channel Feedback Information)를 포함할 수 있다. 일부 실시예들에서, FTM 프레임들(522 및 540)은 CFI를 포함할 수 있다. CFI는 다중-체인 개시자에 대한 AoD의 컴퓨테이션 및/또는 CFI 내의 다중-체인 정보의 포함으로 인한 더 정확한 레인징 추정(예컨대, NDP 프레임에 대한 도착 시간의 개선된 결정)의 컴퓨테이션을 가능하게 할 수 있다.
[0085]
FTM 프레임(540)의 수신의 종료로부터 측정된 SIFS 시간 인터벌 후에, 개시자(505)는 FTM 프레임(540)에 Ack 메시지(545)로 응답할 수 있다. 일부 실시예들에서, 예시적인 메시지 흐름(500)에 도시된 것과 같은 FTM 세션들은 개시자(505)와 응답자(507) 사이의 RTT 및/또는 개개의 액세스 포인트들과 연관된 TDOA(Time Difference Of Arrival) 타이밍 정보를 결정하는 데 사용될 수 있다. 일부 실시예들에서, UE 및/또는 AP 내의 포지션 계산 유닛은 FTM 세션(들)으로부터 유도된 RTT 및/또는 TDOA 정보에 기반하여 UE의 포지션을 결정할 수 있다. 예컨대, RTT는  를 컴퓨팅함으로써 시간들(T3, T4, T5 및 T6)에 기반하여 개시자(505)에 의해 계산될 수 있다.
를 컴퓨팅함으로써 시간들(T3, T4, T5 및 T6)에 기반하여 개시자(505)에 의해 계산될 수 있다.
[0086]
FTM 응답자들은 때때로 FTM 요청에 대한 응답으로 FTM 프레임을 송신할 수 있다. FTM 프레임 송신에 선행하는 추가 FTM 요청은 오버헤드를 증가시킬 수 있다. 또한, 종래의 방식들은 단일 안테나를 사용하여 FTM 프레임들을 송신하는데, 이는 송신 모드들에 관련된 다양한 레인징 파라미터들의 계산을 제한할 수 있다. 또한, 단일 안테나가 송신을 위해 사용될 때, 측정될 수 있는 파라미터들의 타입들이 제한될 수 있고 그리고/또는 측정 정확도가 악화될 수 있다. 예컨대, AoA가 단일 안테나로부터의 송신에 기반하여 측정 및/또는 결정되면, 다수의 안테나 송신들로부터 측정된/결정된 AoA에 비해 측정이 부정확할 수 있다. 본원에 개시된 일부 실시예들에서, FTM 프레임들은 다수의 안테나들을 사용하여 송신될 수 있으며, 이로써 (i) 다양한 파라미터들의 정확한 컴퓨테이션을, (ii) 다수의 송신 모드들에서 가능하게 한다. 일부 실시예들에서, 다수의 안테나들을 사용하여 송신될 수 있는 NDP 프레임들은, 아래에 추가로 요약된 바와 같이, AoA, AoD 및/또는 다양한 다른 파라미터들의 측정을 가능하게 할 수 있다.
[0087]
도 5b는 본원에 제시된 특정 실시예들에 따른, 개시자(552) (예컨대, AP(240))와 응답자(554)(예컨대, 비-AP STA/UE(100))로서 식별된 응답자 간의 예시적인 유니캐스트 메시지 흐름(550)을 도시한다. 예컨대, 예비 서브필드(432)(도 4b)의 제1 비트는 바로 후속하는 NDP 프레임(572)이 레인징을 위해 사용되어야 한다는 것을 응답자(554)에게 나타내기 위해 개시자(552)에 의해 사용될 수 있다. 또한, NDPA 프레임(555)은 (유니캐스트를 나타내는) 단일 STA Info 필드(435)를 포함할 수 있고, RA 필드(420)는 응답자(554)의 어드레스로 설정될 수 있다.
[0088]
도 5b에 도시된 바와 같이, NDPA 프레임(555)은 개시자(552)에 의해 유니캐스팅될 수 있다. NDPA 프레임(555)은 NDPA 프레임(555)의 송신의 종료로부터 측정된 SIFS(565)로 주어진 시간 인터벌 후에 시간 T1(570)에서 프레임(572)의 송신이 후속될 수 있다. 도 5b에 도시된 바와 같이, 프레임(572)은: NDP_az 프레임, 또는 NDP 프레임, 또는 BRP(Beam Refinement Protocol) 프레임 중 하나의 형태를 취할 수 있다.
[0089]
응답자(554)는 NDP 프레임(555)이 수신되는 제1 시간 T2_1(560) 및 CBF 프레임이 전송되는 제2 시간 T3_1(575)을 캡처할 수 있다. CBF 프레임(580)은 프레임(572)의 수신 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T3_1(575)에 전송될 수 있다.
[0090]
일부 실시예들에서, CBF 프레임(580)은 CFI1로서 도시된 CFI 및 시간들 T2_1(560) 및 T3_1(575), 또는 그의 차이를 포함할 수 있다. 일부 실시예들에서, 개시자(552)는 CBF 프레임(580)이 수신되는 시간 T4_1(572)을 캡처할 수 있다. 통상적으로, CBF 프레임들은 빔포밍 매트릭스들과 연관된 각도들을 포함할 수 있다. 본원에 설명된 일부 실시예들에서, CBF 프레임들은 대안적으로(또는 부가적으로) CFI1을 포함할 수 있다. 개시자(552)는 CBF 프레임(580)에서 송신되는 CFI1로부터 AoD 또는 LCI(Location Configuration Information)를 결정할 수 있다. CFI1로부터 결정된 LCI는 응답자(554)의 위도/경도 정보와 같은 위치 정보를 포함할 수 있다.
[0091]
일부 실시예들에서, 응답자(554)는 개시자(552)로부터의 NDP 프레임(572) 및/또는 교정 데이터에 기반하여 AoD를 결정할 수 있다. 일부 실시예들에서, 응답자(554)는 또한 개시자(552)로부터 이전에 획득된 위치 정보(예컨대, 비콘 프레임으로부터의 정보)로부터 LCI(예컨대, 위도/경도)를 결정할 수 있다.
[0092]
일부 실시예들에서, 개시자(552)는 추가로, 시간 T1(570), 시간 T4_1(572), AoD 및 LCI를 포함하는 FTM No Ack 프레임(578)으로 응답할 수 있다. 본원에 사용된 바와 같이, "FTM No Ack" 프레임은 확인응답 응답 필드, 비트, 또는 "FTM No Ack" 프레임에 대한 응답이 본원에서 "FTM Ack" 프레임으로 지칭되는 FTM 프레임 형태로 전송될 수 있다는 표시를 갖는 FTM 프레임의 형태를 취할 수 있다. 확인응답 응답 필드 또는 비트가 설정되지 않을 때, 정규 Ack 프레임은 FTM No Ack 프레임에 대한 응답으로 전송될 수 있다. 일부 실시예들에서, 응답자가 "FTM Ack" 응답에 대한 능력이 없을 때, 정규 Ack 프레임은 FTM No Ack 프레임에 대한 응답으로 전송될 수 있다. 명확성 및 설명의 용이함을 위해, 확인응답 응답 필드, 비트 또는 다른 표시는 또한 본원에서 "FTM Ack" 비트로 지칭된다.
[0093]
종래의 교환들에서, FTM 프레임들은 Ack(Acknowledgment) 프레임(예컨대, 도 5a의 Ack 프레임(532))으로 응답된다. 일부 실시예들에서, FTM No Ack 프레임에서 "FTM Ack" 비트로 지칭되는 비트를 1로 설정하는 것은 종래의 Ack 프레임 응답이 요구되지 않는다는 것을 나타내기 위해 사용될 수 있다. 일부 실시예들에서, FTM No Ack 프레임에 대한 응답은, FTM 프레임의 포맷과 유사한 포맷일 수 있는 FTM Ack 프레임의 형태를 취할 수 있다.
[0094]
일부 실시예들에서, FTM 프레임은 도 5b에서 1로 설정된 "FTM Ack" 비트로 증대될 수 있다. FTM Ack 비트는, FTM Ack=1을 갖는 FTM No Ack 프레임(578)의 수신기가 FTM Ack(FTM Acknowledgment) 프레임(579)과 같은 FTM Ack 프레임으로 응답할 수 있음을 나타내기 위해 사용될 수 있다.
[0095]
일부 실시예들에서, FTM Ack=1을 갖는 FTM No Ack 프레임(578)의 수신 시에, 응답자(554)는 시간 T 2_1(560) 및 시간 T3_1(575)을 포함하는 FTM Ack 프레임(579)으로 SIFS 인터벌 후에 응답할 수 있다. 일부 실시예들에서, 개시자(552)와 응답자(554) 간의 왕복 시간은, 예컨대, 개시자(552) 및/또는 응답자 1(554)에 의해  로서 계산될 수 있다.
로서 계산될 수 있다.
[0096]
기존의 CBF 구조는 최대 8 개의 스트림들(56 개의 각도), 468 개의 서브캐리어들, 및 평균적으로 톤 당 8 비트들을 지원한다. 따라서, CBF는  바이트들의 정보를 보유할 수 있으며, 이는 본원에 설명된 일부 다중-안테나 실시예들을 지원할 수 있다.
바이트들의 정보를 보유할 수 있으며, 이는 본원에 설명된 일부 다중-안테나 실시예들을 지원할 수 있다.
[0097]
도 5c는 상이한 안테나 구성들에 대해 송신 STA로부터 수신 STA로 송신될 수 있는 CFI 데이터의 양을 도시한다. 일부 실시예들에서, CFI 정보 엘리먼트/필드는 현재 FTM 프레임 정의에 선택적인 서브-엘리먼트로서 추가되거나 통합될 수 있다. 일부 실시예들에서, CFI 필드는 다양한 규격들에 정의된 바와 같이 CSI(Channel State Information) 보고 필드와 유사한 방식으로 구성될 수 있다. 예컨대, CFI 필드의 구조는 WLAN MAC & PHY 규격들(예컨대, 표 9-52, §9.4.1.28)에 정의된 바와 같이 CSI 보고서 필드의 구조를 미러링할 수 있다.
[0098]
도 5d는 CBF(Compressed Beamforming Feedback) 프레임(547)의 부분을 형성할 수 있는 VHT MIMO 제어 필드(547)의 포맷을 도시한다. VHT MIMO 제어 필드(547)는, VHT MIMO 제어 필드 내의 비트들(B16 및 B17)인 예비 비트들(586)을 포함한다. 일부 실시예들에서, 예컨대, Nc 인덱스 서브필드(557)=7(Nc=8), Nr 인덱스 서브필드(567)=7(Nr=8), 채널 폭 서브필드(577)=3(160 MHz 또는 80+80 MHz), 그루핑(grouping) 서브필드(587)=0(Ng=1, 그루핑 없음), 코드북 정보 서브필드(588)=1, 및 피드백 타입 서브필드(589)=0(단일 사용자) 또는 1(다중 사용자)일 때, 예비 비트들(586)은, CBF 프레임이 레인징/RTT 목적으로 사용되고 있다는 것을 나타내기 위해 사용될 수 있다. 일부 실시예들에서, 그루핑 서브필드(587)=3(예비됨)은 또한, CBF 프레임이 (예컨대, 도 5b에 도시된 바와 같이) 레인징/RTT 목적으로 사용되고 있다는 것을 나타내기 위해 사용될 수 있다.
[0099]
도 5e는 일부 개시된 실시예들에 따른 레인징을 위한 후속 프레임(NDP_az, NDP, 또는 BRP)을 통보하는 NDPA(593)를 갖는 유니캐스트 메시지 흐름(590)을 도시한다. 도 5e에 도시된 바와 같이, NDPA 프레임(593)은 시간 T1(583)에서 FTM 개시자(591)에 의해 유니캐스팅될 수 있다. NDPA 프레임(593)은 NDPA 프레임(593)의 송신의 종료로부터 측정된 SIFS(Short Interframe Space)(565)로 주어진 시간 인터벌 후에 시간 T1'(595)에서 프레임(594)의 송신이 후속될 수 있다.
[00100]
또한, 도 5e에 도시된 바와 같이, NDPA 프레임(593)에 후속하는 프레임(594)은 시간 T1(591)을 갖는 NDP_az 프레임, 또는 NDP 프레임, 또는 BRP(Beam Refinement Protocol) 프레임 중 하나의 형태를 취할 수 있다.
[00101]
FTM 응답자(592)는 NDPA 프레임(593)이 수신되는 제1 시간 T2(599) 및 프레임(594)이 수신되는 제2 시간 T2'(596) 및 FTM 프레임(595)이 수신되는 제3 시간 T3(597)을 캡처할 수 있다. FTM 프레임(595)은 시간 T2(599), 시간 T2'(596), CFI 및 시간 T3(597)을 포함할 수 있다. 도 5e에 도시된 바와 같이, FTM 프레임(595)은 프레임(594)의 수신의 종료에 후속하는 SIFS 시간 인터벌 후에 전송될 수 있다.
[00102]
FTM 개시자(591) 및 FTM 응답자(592)가 동기화될 때, 비행 시간(Time of Flight)은 (a) 시간들 T2(599) 및 T1(583)의 차이, 즉, (T2-T1); 또는 (b)  로 계산될 수 있다. FTM 개시자(591) 및 FTM 응답자(592)가 동기화되지 않을 때, TOF는
로 계산될 수 있다. FTM 개시자(591) 및 FTM 응답자(592)가 동기화되지 않을 때, TOF는  이다.
이다.
[00103]
일부 실시예들에서, FTM 개시자(591)는 FTM 프레임(595)에 Ack(Acknowledgment) 프레임(595A)으로 응답할 수 있다.
[00104]
도 6은 FTM 개시자(605)(예컨대 AP (240))와 2개의 FTM 응답자들, 즉, FTM 응답자 1(610) 및 FTM 응답자 2(615)(예컨대, UE들(100-1 및 100-2)) 간의 예시적인 메시지 흐름(600)을 도시하며, NDPA는 FTM 응답자 1 및 FTM 응답자 2 둘 모두에 브로드캐스팅된다.
[00105]
도 6에 도시된 바와 같이, NDPA 프레임(620)은 FTM 개시자(605)에 의해 브로드캐스팅 또는 멀티캐스팅될 수 있다. 예컨대, 예비 서브필드(432)(도 4b)의 제1 비트는, 바로 후속하는 NDP 프레임(515)이 레인징을 위해 사용되어야 한다는 것을 응답자(507)에 나타내기 위해 FTM 개시자(605)에 의해 사용될 수 있다. 예컨대, NDPA 프레임(620)은 브로드캐스트를 나타내기 위한 다수의 STA Info 필드들(435)(도 4a)을 포함할 수 있고, RA 필드(420)(도 4a)는 브로드캐스트 어드레스로 설정될 수 있다. NDPA 프레임(620)은, NDPA 프레임(620)의 송신의 종료로부터 측정된 SIFS(622)로 주어진 시간 인터벌 후에 시간 T1(624)에서 NDP 프레임(625)의 송신이 후속될 수 있다.
[00106]
FTM 응답자 1(610)은, NDP 프레임(625)이 FTM 응답자 1(610)에 의해 수신되는 제1 시간 T2_1(626) 및 CBF(Compressed Beamforming Feedback) 프레임(630)이 FTM 응답자 1(610)에 의해 전송되는 제2 시간 T3_1(636)을 캡처할 수 있다. 일부 실시예들에서, CBF 프레임(630)은, NDP 프레임(625)의 수신으로부터 SIFS로 주어진 시간 인터벌 후에 FTM 응답자 1(610)에 의해 전송될 수 있다. 일부 실시예들에서, VHT MIMO 제어 필드(도 5d) 내의 적절한 예비 비트들(586)(도 5d)은, CBF 프레임이 레인징/RTT 목적으로 사용되고 있음을 나타내기 위해 CBF 프레임들에서 설정될 수 있다. 일부 실시예들에서, CBF 프레임(630)은 FTM 응답자 1(CFI_1)의 CFI를 포함할 수 있다. 일부 실시예들에서, FTM 개시자(605)는 CBF 프레임(630)이 수신되는 시간 T4_1(632)을 캡처할 수 있다.
[00107]
또한, FTM 응답자 2(615)는, NDP 프레임(625)이 FTM 응답자 2(615)에 의해 수신되는 제1 시간 T2_2(628) 및 CBF(Compressed Beamforming Feedback) 프레임(640)이 FTM 응답자 2(615)에 의해 전송되는 제2 시간 T3_2(634)를 캡처할 수 있다. 일부 실시예들에서, CBF 프레임(640)은, 응답자 2에서 NDP 프레임(625)의 수신으로부터 SIFS로 주어진 시간 인터벌 후에 FTM 응답자 2(615)에 의해 전송될 수 있다. 일부 실시예들에서, CBF 프레임(640)은 FTM 응답자 2의 CFI(CFI_2)를 포함할 수 있다. 일부 실시예들에서, FTM 개시자(605)는 CBF 프레임(630)이 수신되는 시간 T4_2(642)를 캡처할 수 있다.
[00108]
일부 실시예들에서, FTM 응답자 1(610)은 또한 시간들 T2_1(626) 및 T3_1(636)을 포함하는 FTM No Ack 프레임(644)으로 응답할 수 있다. FTM No Ack 프레임(644)은, 도 6a에서 1로 설정되는 "FTM Ack" 비트로 증대될 수 있다. FTM Ack 비트는, FTM Ack=1을 갖는 FTM 프레임(644)의 수신기가 FTM Ack(FTM Acknowledgment) 프레임(645)과 같은 FTM Ack 프레임으로 응답할 수 있음을 나타내기 위해 사용될 수 있다. 일부 실시예들에서, FTM Ack=1을 갖는 FTM No Ack 프레임(644)의 수신 시에, 개시자(605)는 시간들 T1(624) 및 T4_1(632)을 포함하는 FTM Ack 프레임(645)으로 응답할 수 있다. 일부 실시예들에서,  이고, 여기서 RTT1은 개시자(605)와 응답자 1(610) 사이의 RTT이다. RTT1은 개시자(605) 및/또는 응답자 1(610)에 의해 계산될 수 있다. 일부 실시예들에서, FTM Ack 프레임은 FTM 프레임과 유사하거나 동일한 포맷일 수 있다.
이고, 여기서 RTT1은 개시자(605)와 응답자 1(610) 사이의 RTT이다. RTT1은 개시자(605) 및/또는 응답자 1(610)에 의해 계산될 수 있다. 일부 실시예들에서, FTM Ack 프레임은 FTM 프레임과 유사하거나 동일한 포맷일 수 있다.
[00109]
일부 실시예들에서, 응답자 2(615)는 또한 시간들 T2_2(628) 및 T3_2(634)를 포함하는 FTM No Ack 프레임(646)으로 응답할 수 있다. FTM No Ack 프레임(646)은, 도 6a에서 1로 설정되는 "FTM Ack" 비트로 증대될 수 있다. FTM Ack 비트는, FTM Ack=1을 갖는 FTM 프레임(646)의 수신기가 FTM Ack(FTM Acknowledgment) 프레임(647)과 같은 FTM Ack 프레임으로 응답할 수 있음을 나타내기 위해 사용될 수 있다. 일부 실시예들에서, FTM Ack=1을 갖는 FTM No Ack 프레임(646)의 수신 시에, 응답자 2(615)는 시간들 T1(624) 및 T4_2(642)를 포함하는 FTM Ack 프레임(647)으로 응답할 수 있다. 일부 실시예들에서,  이고, 여기서 RTT2는 개시자(605)와 응답자 2(615) 사이의 RTT이다. RTT2는 개시자(605) 및/또는 응답자 2(615)에 의해 계산될 수 있다.
이고, 여기서 RTT2는 개시자(605)와 응답자 2(615) 사이의 RTT이다. RTT2는 개시자(605) 및/또는 응답자 2(615)에 의해 계산될 수 있다.
[00110]
일부 실시예들에서, NDPA 프레임(620) 및 NDP 프레임(625)에 대한 다수의 응답자들에 의한 응답들을 가능하게 하기 위해, 응답자들 간에 순서 또는 우선순위 방식이 설정될 수 있다. 일반적으로, k 개의 응답자들을 갖는 환경에서, 제k 응답자에 대한 RTT는  로서 계산되며, 여기서 T4_k는 개시자(605)에서 제k 응답자로부터 CBF 프레임의 수신 시간이고; T2_k는 제k 응답자에서 NDP 프레임(625)의 수신 시간이고; T3_k는 제k 응답자로부터의 CBF 프레임이 송신되는 시간이다. 위에 요약된 바와 같이, 제k 응답자로부터의 CBF 프레임은 응답자 k의 CFI(CFIk)를 포함할 수 있다.
로서 계산되며, 여기서 T4_k는 개시자(605)에서 제k 응답자로부터 CBF 프레임의 수신 시간이고; T2_k는 제k 응답자에서 NDP 프레임(625)의 수신 시간이고; T3_k는 제k 응답자로부터의 CBF 프레임이 송신되는 시간이다. 위에 요약된 바와 같이, 제k 응답자로부터의 CBF 프레임은 응답자 k의 CFI(CFIk)를 포함할 수 있다.
[00111]
도 7a는 개시자(705)(예컨대 AP(240))와 2개의 응답자들, 즉, 응답자 1(710) 및 응답자 2(715)(예컨대, UE들 또는 비-AP STA들(100-1 및 100-2)) 간의 예시적인 메시지 흐름(700)을 도시하며, NDPA는 응답자들, 즉, 응답자 1 및 응답자 2에 브로드캐스팅/멀티캐스팅된다.
[00112]
도 7a에 도시된 바와 같이, NDPA 프레임(720)은 개시자(705)에 의해 브로드캐스팅될 수 있다. NDPA 프레임(720)은, NDPA 프레임(720)의 송신의 종료로부터 측정된 SIFS(722)로 주어진 시간 인터벌 후에 시간 T1(724)에서 NDP 프레임(725)의 송신이 후속될 수 있다.
[00113]
응답자 1(710)은, NDP 프레임(725)이 응답자 1(710)에 의해 수신되는 제1 시간 T2_1(726) 및 CBF(Compressed Beamforming Feedback) 프레임(730)이 응답자 1(710)에 의해 전송되는 제2 시간 T3_1(736)을 캡처할 수 있다. 일부 실시예들에서, CBF 프레임(730)은, NDP 프레임(725)의 수신의 종료로부터 SIFS로 주어진 시간 인터벌 후에 응답자 1(710)에 의해 전송될 수 있다. 일부 실시예들에서, 예비 비트들(586)(도 5d)은, CBF 프레임이 레인징/RTT 목적으로 사용되고 있다는 것을 나타내기 위해 사용될 수 있다. 일부 실시예들에서, CBF 프레임(730)은 응답자 1(CFI_1)의 하나의 CFI를 포함할 수 있다. 일부 실시예들에서, 개시자(705)는 CBF 프레임(730)이 수신되는 시간 T4_1(732)을 캡처할 수 있다.
[00114]
일부 실시예들에서, 개시자 1(705)은 응답자 2(715)와 연관된 BSSID(Basic Service Set IDdentifier)를 갖는 빔포밍 보고 폴 프레임(738)을 전송할 수 있다. BRP 프레임은 이전 사운딩으로부터 빔포밍 보고(이를테면, VHT(Very High Throughput) 빔포밍 보고)를 획득하는 데 사용될 수 있다. 응답자 2(715)는, BRP 프레임(738)이 응답자 2(715)에 의해 수신되는 제1 시간 T2_2(728) 및 CBF 프레임(740)이 응답자 2(715)에 의해 전송되는 제2 시간 T3_2(734)를 캡처할 수 있다. 일부 실시예들에서, CBF 트리거 프레임(740)은, 응답자 2(715)에서 CBF 트리거 프레임(738)의 수신의 종료로부터 SIFS로 주어진 시간 인터벌 후에 응답자 2(715)에 의해 전송될 수 있다. 일부 실시예들에서, CBF 프레임(740)은 응답자 2의 CFI(CFI_2) 중 하나를 포함할 수 있다. 일부 실시예들에서, 개시자(705)는 CBF 프레임(730)이 수신되는 시간 T4_2(742)를 캡처할 수 있다.
[00115]
일부 실시예들에서, 응답자 1(710)은 또한 시간들 T2_1(726) 및 T3_1(736)을 포함하는 FTM No Ack 프레임(744)으로 응답할 수 있다. FTM No Ack 프레임(744)은, 도 7a에서 1로 설정되는 "FTM Ack" 비트로 증대될 수 있다. FTM Ack 비트는, FTM Ack=1을 갖는 FTM 프레임(744)의 수신기가 FTM Ack(FTM Acknowledgment) 프레임(745)과 같은 FTM Ack 프레임으로 응답할 수 있음을 나타내기 위해 사용될 수 있다. 일부 실시예들에서, FTM Ack=1을 갖는 FTM No Ack 프레임(744)의 수신 시에, 응답자 1(710)은 시간들 T1(724) 및 T4_1(732)을 포함하는 FTM Ack 프레임(745)으로 응답할 수 있다. 일부 실시예들에서,  이고, 여기서 RTT1은 개시자(705)와 응답자 1 사이의 RTT이다. 개시자(705) 및 응답자 1(710) 둘 모두가 충분한 타임스탬프 정보를 갖기 때문에, RTT1은 개시자(705) 및/또는 응답자 1(710)에 의해 계산될 수 있다.
이고, 여기서 RTT1은 개시자(705)와 응답자 1 사이의 RTT이다. 개시자(705) 및 응답자 1(710) 둘 모두가 충분한 타임스탬프 정보를 갖기 때문에, RTT1은 개시자(705) 및/또는 응답자 1(710)에 의해 계산될 수 있다.
[00116]
일부 실시예들에서, 응답자 2(715)는 또한 시간들 T2_2(728) 및 T3_2(734)를 포함하는 FTM No Ack 프레임(746)으로 응답할 수 있다. FTM No Ack 프레임(746)은, 도 7a에서 1로 설정되는 "FTM Ack" 비트로 증대될 수 있다. FTM Ack 비트는, FTM Ack=1을 갖는 FTM 프레임(746)의 수신기가 FTM Ack(FTM Acknowledgment) 프레임(747)과 같은 FTM Ack 프레임으로 응답할 수 있음을 나타내기 위해 사용될 수 있다. 일부 실시예들에서, FTM Ack=1을 갖는 FTM No Ack 프레임(746)의 수신 시에, 응답자 2(715)는 시간들 T1(724) 및 T4_2(742)를 포함하는 FTM Ack 프레임(747)으로 응답할 수 있다. 일부 실시예들에서,  이고, 여기서 RTT2는 응답자 2에 대한 RTT이고, 개시자(705) 및/또는 응답자 2(715)에 의해 계산될 수 있다.
이고, 여기서 RTT2는 응답자 2에 대한 RTT이고, 개시자(705) 및/또는 응답자 2(715)에 의해 계산될 수 있다.
[00117]
일부 실시예들에서, 빔포밍 보고 폴 프레임은 개시자(705)에 의해 각각의 응답자_k에 전송될 수 있고, 이로써 NDPA 프레임(720) 및 NDP 프레임(725)에 대한 다수의 응답자들에 의한 응답들을 가능하게 한다. 일반적으로, k 개의 응답자들을 갖는 환경에서, RTT_k로 주어진 제k 응답자에 대한 RTT는  로 계산될 수 있고, 여기서, T4_k는 개시자(705)에서 제k 응답자로부터 CBF 프레임을 수신한 시간이고; T2_k는 제k 응답자에서 대응하는 제k BRP 프레임을 수신한 시간이고, T3_k는 제k 응답자로부터의 CBF 프레임이 송신되는 시간이다. 위에서 요약된 바와 같이, 제k 응답자의 CBF 프레임은 응답자_k의 CFI(CFI_k)를 포함할 수 있다.
로 계산될 수 있고, 여기서, T4_k는 개시자(705)에서 제k 응답자로부터 CBF 프레임을 수신한 시간이고; T2_k는 제k 응답자에서 대응하는 제k BRP 프레임을 수신한 시간이고, T3_k는 제k 응답자로부터의 CBF 프레임이 송신되는 시간이다. 위에서 요약된 바와 같이, 제k 응답자의 CBF 프레임은 응답자_k의 CFI(CFI_k)를 포함할 수 있다.
[00118]
도 7b는 본원에 제시된 특정 실시예들에 따른 예시적인 빔포밍 보고 폴 프레임에 대한 포맷을 도시한다. 일부 실시예들에서, 빔포밍 보고 폴 프레임은 프레임 제어 필드(752); 지속기간 필드(754); 의도된 수신자의 어드레스로 설정된 RA(Recipient Address) 필드(756); CBF 트리거를 송신하는 STA의 어드레스로 설정될 수 있는 TA(Transmitter Address) 필드(756); 및 VHT(Very High Throughput) 또는 HEW의 요청된 피드백 세그먼트들을 나타내는 피드백 세그먼트 재송신 비트 맵 필드(762)를 포함할 수 있다.
[00119]
도 8a 및 8b는 본원에 제시된 특정 실시예들에 따른, AoA, AoD 및/또는 다른 정보를 포함할 수 있는 예시적인 FTM(Fine Timing Measurement) 프레임(800)을 도시한다. 일부 실시예들에서, FTM No Ack 프레임 및 FTM Ack 프레임들은 FTM 프레임(800)에서 비트들 또는 필드들의 적절한 값들을 갖는 FTM 프레임(800)의 형태를 취할 수 있다. 따라서, FTM 프레임(800)은 본원에 설명된 FTM, Ack, FTM No Ack 및 FTM Ack 메시지 시퀀스들/교환들과 관련하여 사용될 수 있다.
[00120]
도 8a에 도시된 바와 같이, FTM 프레임(800)은 필드들, 즉, 카테고리(802), 공개 액션(804), 다이얼로그 토큰(806), 팔로우 업 다이얼로그 토큰(608), TOD(Time of Departure)(810), TOA(Time of Arrival)(812), TOD 에러(814), TOA 에러(816)를 포함할 수 있다. FTM 프레임(800)은 선택적으로 FTM 동기화 정보(818), LCI 보고(820) 필드, 위치 시빅 보고 필드(822) 및 미세 타이밍 측정 파라미터 필드(824) 중 하나 또는 그 초과를 포함할 수 있고, 이들은 가변 길이를 가질 수 있다. 위의 필드들은 WLAN MAC & PHY 규격들에 정의된다.
[00121]
공개 액션(804)은 다양한 공개 액션 프레임 포맷들을 구별하고, 다양한 확장된 관리 액션들을 지정하기 위한 메커니즘을 제공한다. 32의 값들은 FTM 요청을 나타내는 반면에, 33의 값은 FTM 프레임을 나타낸다. 카테고리(802)는 공개 액션(804)의 카테고리를 지정할 수 있다. 예컨대, 21의 카테고리 값은 VHT를 나타낼 수 있다. 다이얼로그 토큰(806)은 FTM No Ack/FTM 프레임을 한 쌍 중 제1 FTM 프레임으로 식별하기 위해 응답하는 STA에 의해 선택된 비제로 값일 수 있고, 제2 또는 팔로우-업 FTM 프레임이 나중에 전송된다. 다이얼로그 토큰 필드는 FTM 세션의 종료를 나타내기 위해 0으로 설정될 수 있다.
[00122]
한 쌍 중 제2 또는 팔로우-업 FTM 프레임은, (i) (한 쌍 중) 현재(제2) FTM/FTM ack 프레임이 팔로우-업 FTM이고, (ii) TOD(810), TOA(812), TOD 에러(814) 및 TOA 에러(818) 필드들이 한 쌍 중 제1 FTM/FTM No Ack 프레임으로 캡처된 타임스탬프들과 연관된 값들을 포함한다는 것을 나타내기 위해, 팔로우 업 다이얼로그 토큰(808)에서 마지막으로 전송된 FTM 프레임 내의 다이얼로그 토큰(806)의 비제로 값을 사용할 수 있다. 팔로우 업 다이얼로그 토큰(808)은, (i) 현재 FTM/FTM No Ack 프레임이 팔로우 업이 아니고, 그리고 (ii) TOD(810), TOA(812), TOD 에러(814) 및 TOA 에러(818) 필드들이 예비된 것을 나타내기 위해 0으로 설정될 수 있다. TOD 및 TOA 필드들은 피코초 단위로 표현될 수 있다.
[00123]
일부 실시예들에서, TOD(810)는, 마지막으로 송신된 FTM No Ack/FTM 프레임의 프리앰블의 시작이 송신하는 STA의 송신 안테나 커넥터에 나타난, 시간 축에 관련하여 시간을 나타내는 타임스탬프를 포함할 수 있다.
[00124]
일부 실시예들에서, TOA(812) 필드는, 마지막으로 송신된 FTM No Ack/FTM 프레임에 대한 FTM Ack/Ack 프레임의 프리앰블의 시작이 수신하는 STA의 수신 안테나 커넥터에 도착한, 시간 축에 관련하여 시간을 나타내는 타임스탬프를 포함할 수 있다.
[00125]
일부 실시예들에서, FTM 동기화 정보(818)는 초기 FTM 프레임 및 임의의 재송신들에 존재한다.
[00126]
도 8b는 예시적인 AoA 필드(830)의 포맷을 도시하는 반면에, 도 8c는 본원에 개시된 특정 실시예들에 따른 예시적인 AoD 필드(840)의 포맷을 도시한다. 일부 실시예들에서, AoA 필드(830)는 엘리먼트 ID(832), 길이(834) 및 AoA 정보(848)를 포함할 수 있다. 마찬가지로, 일부 실시예들에서, AoD 필드는 엘리먼트 ID(842), 길이(844), AoD 정보(848)를 포함할 수 있다. 일부 구현들에서, AoA 정보는, 지정된 프레임의 도착 각도 정보를 나타내기 위해, 아래에 설명되는 바와 같이, 도 8f에서 Theta_AoA 및 Phi_AoA에 대한 값들을 저장할 수 있다. 일부 구현들에서, AoD 필드는 지정된 프레임의 출발 각도 정보를 나타내기 위해 Theta_AoD 및 Phi_AoD에 대한 값들을 저장할 수 있다.
[00127]
일 실시예에서, (다른 실시예들에서는, 다른 필드 길이들이 사용될 수 있지만) TOD 필드(810)는 6 바이트들을 포함할 수 있고, TOA 필드(812)는 6 바이트들을 포함할 수 있고, (예컨대, 별개의 선택적인 AoA 필드(830) 또는 FTM 파라미터들(824)의 부분으로서) AoA 필드는 5 바이트들을 포함할 수 있고, (예컨대, 별개의 선택적 AoD 필드(840) 또는 FTM 파라미터들(824)의 부분으로서) AoD 필드(613)는 5 바이트들을 포함할 수 있다.
[00128]
일부 실시예들에서, AoA 필드(830)는 레인징 동작 중에 교환되는 프레임들에 대한 AoA 정보(838)를 포함할 수 있고, AoD 필드(840)는 레인징 동작 중에 교환되는 프레임들에 대한 AoD 정보(848)를 포함할 수 있다. 예컨대, 응답자는 FTM 프레임(800)의 AoA 필드로서 기능하는 AoA 필드(830)(또는 다른 정보 엘리먼트)에 AoA 정보(838)를 임베딩할 수 있고, FTM 프레임의 AoD 정보(848)를 AoD 필드(840)(또는 FTM 프레임(800)의 AoD 필드로서 기능하는 다른 정보 엘리먼트)에 임베딩할 수 있다. 응답자 디바이스는 또한 FTM 프레임(800)의 TOA 필드(812)에 TOA 정보를 임베딩할 수 있고, FTM 프레임(800)의 TOD 필드(810)에 TOD 정보를 임베딩할 수 있다. 이어서, 응답자 STA는 각도 정보(예컨대, AoD 및/또는 AoA) 및 시간 값들을 개시자 디바이스로 송신하기 위한 FTM No Ack 프레임 레인징 동작들로서 FTM 프레임(800)을 사용할 수 있다. 일부 실시예들에서, 부분적으로, FTM No Ack 프레임은 FTM 프레임들에 대한 기존의 표준들/포맷들을 준수할 수 있고, 이로써 FTM(FTM No Ack) 및/또는 FTM Ack 프레임들 내의 AoA, AoD 및 다른 정보의 임베딩, 송신 및 수신을 지원하는 디바이스들 및 레거시 디바이스들이 혼합된 환경들에서 프레임들의 사용을 가능하게 한다.
[00129]
일부 실시예들에서, 엘리먼트 ID 필드(842)는, AoA 필드(830)가 지정된 프레임에 대한 AoA 정보를 포함한다는 것을 나타내는 엘리먼트 ID 값을 저장할 수 있는 반면에, 길이 필드(834)는 AoA 필드(830)의 길이(바이트 단위)를 나타내는 값을 저장할 수 있다. 일부 실시예들에서, 엘리먼트 ID 필드(842)는, AoD 필드(840)가 지정된 프레임에 대한 AoD 정보를 포함한다는 것을 나타내는 엘리먼트 ID 값을 저장할 수 있는 반면에, 길이 필드(844)는 AoD 필드(840)의 길이(바이트 단위)를 나타내는 값을 저장할 수 있다.
[00130]
도 8d는, 응답이 FTM 확인응답(FTM Ack) 프레임으로서 전송될 수 있음을 나타내는 예시적인 FTM(Fine Timing Measurement)/FTM No Ack 프레임(800)의 부분(850)을 도시한다. 일부 실시예들에서, FTM/FTM No Ack 프레임(800)의 예비 비트는, FTM Ack 프레임으로 응답이 요구된다는 것을 응답자에게 표시하도록 설정될 수 있다. 일부 실시예들에서, 최대 TOA 에러 필드(860)의 비트 B15(870)는, FTM Ack 프레임으로 응답이 요구된다는 것을 응답자에게 나타내기 위해 사용될 수 있다. FTM No Ack 프레임(800) 내의 예비 비트(예컨대, 최대 TOA 에러 필드(860)의 비트 B15(870)) ― 이는 FTM Ack 프레임으로 응답이 요구된다는 것을 응답자에 나타내기 위해 사용됨 ― 는 또한 본원에서 확인응답 응답 비트로 지칭된다.
[00131]
도 8e는 반경 "r" 및 각도들 "세타(theta)" 및 "파이(phi)"를 사용하여 STA의 포지션을 나타내기 위한 예시적인 3 차원 좌표계(880)이다. 도 8a에 도시된 바와 같이, 파이는 수평(x-y) 평면에 관련된 각도일 수 있는 반면에, 세타는 수직(z) 축에 관련된 각도일 수 있다. 파이는 0° 내지 360°의 범위일 수 있는 반면에, 세타는 0° 내지 180°의 범위일 수 있다. 반경 r은 원점과 원점에 대해 무선 디바이스의 위치를 나타내는 점 좌표 사이의 거리이다. 일부 구현들에서, AoA 필드는, 지정된 프레임의 도착 각도 정보를 나타내기 위해 Theta_AoA 및 Phi_AoA에 대한 값들을 저장할 수 있다. 일부 구현들에서, AoD 필드는 지정된 프레임의 출발 각도 정보를 나타내기 위해 Theta_AoD 및 Phi_AoD에 대한 값들을 저장할 수 있다.
사이의 거리이다. 일부 구현들에서, AoA 필드는, 지정된 프레임의 도착 각도 정보를 나타내기 위해 Theta_AoA 및 Phi_AoA에 대한 값들을 저장할 수 있다. 일부 구현들에서, AoD 필드는 지정된 프레임의 출발 각도 정보를 나타내기 위해 Theta_AoD 및 Phi_AoD에 대한 값들을 저장할 수 있다.
[00132]
따라서, 개시된 실시예들은, 일부 실시예들에서, 종래의 FTM 프레임의 형태를 취할 수 있는 FTM 프레임(800)의 사용을 포함한다. 일부 실시예들에서, FTM 프레임(800)은 AoA, AoD 및 다른 정보를 포함할 수 있다. 예컨대, FTM 측정 파라미터(824), 부가적인 선택적인 AOA 및/또는 AoD 필드들은 AoA, AoD 및/또는 다른 파라미터들을 포함할 수 있다. 일부 실시예들에서, FTM 측정 파라미터들(824)은 AoA, AoD 및/또는 다른 파라미터들에 관한 정보를 반송하는 데 사용될 수 있다.
[00133]
일부 실시예들에서, 별개의 선택적인 AoA 및/또는 AoD 필드들이 FTM 프레임(800)에 제공될 수 있다. AoA 및/또는 AoD 필드들은 AoA 및/또는 AoD 정보를 반송할 수 있다. FTM 프레임(800)은, FTM 프레임(800)이 부가 정보를 포함하는 때를 나타내기 위해 다른 비트들, 필드들 등을 포함할 수 있다. 일부 실시예들에서, AoA, AoD, FTM Ack 및 다른 정보는, 레거시 디바이스들이 정상적으로 계속해서 기능할 수 있도록 하는 방식으로 포함될 수 있다. 예컨대, 일부 실시예들에서, 응답자 디바이스가 액세스 포인트 STA일 수 있는 경우에, 응답자 디바이스는, 응답자 디바이스가 개시자 디바이스와 응답자 디바이스 사이에서 교환되는 하나 또는 그 초과의 프레임들에 AoA 및/또는 AoD 정보를 포함시킬 수 있는지를 나타내는 정보를 비콘 또는 다른 프레임에 임베딩할 수 있다. 일부 양상들에서, 이러한 정보는 비콘 프레임 또는 다른 프레임의 IE(information element) 또는 VSIE(vendor-specific information element) 내에 임베딩될 수 있다.
[00134]
또한, 일부 실시예들에서, FTM 프레임(800)은 (대안적으로 또는 부가적으로) FTM No Ack 또는 FTM Ack 프레임의 형태를 취할 수 있다. 예컨대, 도 8c에 도시된 바와 같이, FTM No Ack 프레임(800) 내의 예비 비트 또는 확인응답 응답 비트는, FTM Ack 프레임으로 응답이 요구된다는 것을 응답자에게 표시하도록 설정될 수 있다.
[00135]
일부 실시예들에서, AoA 정보 필드(838)의 처음 12 비트들은 Theta_AoA에 대한 값을 나타내기 위해 사용될 수 있고, AoA 정보 필드의 그 다음 12 비트들은 Phi_AoA에 대한 값을 나타내기 위해 사용될 수 있다. 유사하게, AoD 정보 필드(848)의 처음 12 비트들은 Theta_AoD에 대한 값을 나타내기 위해 사용될 수 있고, AoD 정보 필드(848)의 그 다음 12 비트들은 Phi_AoD에 대한 값을 나타내기 위해 사용될 수 있다. 실시예들에서, 12-비트 값들이 사용되는 경우에, Theta_AoA 및 Theta_AoD에 대한 12-비트 값들은 약 0.044°(180°를 (212-1)로 나눔)의 분해능을 제공할 수 있는 반면, Phi_AoA 및 Phi_AoD에 대한 12-비트 값들은 약 0.088°(360°를 (212-1)로 나눔)의 분해능을 제공할 수 있다.
[00136]
현재 FTM 프로토콜들(예컨대, IEEE 802.11REVmc 표준들에 의해 정의됨)에 따라 포맷된 FTM 프레임들은, 예컨대, 타임스탬프 값들(t1_TOD 및 t2_ TOA)을 임베딩하기 위해, TOD 및 TOA 정보를 각각 저장하기 위한 6-바이트 TOD 필드(810) 및 6-바이트 TOA 필드(812)를 포함하고, 여기서 t1_TOD는 제1 프레임의 출발 시간이고, t2_ TOA는 대응하는 응답 프레임의 도착 시간이며, 여기서 제1 프레임 및 대응하는 응답 프레임은 RTT를 측정하는 데 사용된다. 일부 실시예들에서, RTT가 2개의 개별 타임스탬프 값들보다는 단일 시간 차이 값 을 사용하여 결정될 수 있기 때문에, 예컨대, TOD(810) 또는 TOA(812) 필드들 중 하나는 AoA 및 AoD 정보를 저장하도록 다른 목적으로 변경될 수 있고, 이로써 FTM 프레임이 AoA 및 AoD 정보를 저장하는 별개의 필드를 포함할 필요성을 제거한다(그리고 따라서 FTM 프레임의 크기를 감소시킴). 예컨대, 위에서 표시된 바와 같이, RTT는
을 사용하여 결정될 수 있기 때문에, 예컨대, TOD(810) 또는 TOA(812) 필드들 중 하나는 AoA 및 AoD 정보를 저장하도록 다른 목적으로 변경될 수 있고, 이로써 FTM 프레임이 AoA 및 AoD 정보를 저장하는 별개의 필드를 포함할 필요성을 제거한다(그리고 따라서 FTM 프레임의 크기를 감소시킴). 예컨대, 위에서 표시된 바와 같이, RTT는  로 결정될 수 있으며, 여기서 t1_TOD는 제1 프레임의 출발 시간이고, t2_ TOA는 대응하는 응답/확인응답 프레임의 도착 시간이며, 여기서 제1 프레임 및 대응하는 응답 프레임은 RTT를 측정하는 것을 포함하여 레인징을 위해 사용된다.
로 결정될 수 있으며, 여기서 t1_TOD는 제1 프레임의 출발 시간이고, t2_ TOA는 대응하는 응답/확인응답 프레임의 도착 시간이며, 여기서 제1 프레임 및 대응하는 응답 프레임은 RTT를 측정하는 것을 포함하여 레인징을 위해 사용된다.
[00137]
도 9a는 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 대칭적인 메시지 흐름을 도시한다. 예컨대, NDPA 프레임(912)의 예비 서브필드(432)(도 4b)의 제1 비트는, 바로 후속하는 NDP 프레임(918)이 레인징을 위해 사용되어야 한다는 것을 응답자(910)에게 나타내기 위해 개시자(905)에 의해 사용될 수 있다. 또한, NDPA 프레임(912)의 예비 서브필드(432)(도 4b)의 제2 비트는, 개시자(905)가 레인징 정보를 공유할 수 있음을 응답자(910)에게 나타내기 위해 개시자(905)에 의해 사용될 수 있다.
[00138]
도 9a에 도시된 바와 같이, NDPA 프레임(912)은 개시자(905)에 의해 전송될 수 있다. NDPA 프레임(912)은, NDPA 프레임(912)의 송신의 종료로부터 측정된 SIFS(914)로 주어진 시간 인터벌 후에 시간 T1(920)에서 NDP 프레임(918)의 송신이 후속될 수 있다. 개시자(905)는 시간 T1(920)에서 NDP 프레임(912)의 송신 시간을 기록할 수 있다. 응답자(910)는 시간 T2(916)에서 NDP 프레임(912)의 수신 시간을 기록할 수 있다.
[00139]
또한, 도 9a에 도시된 바와 같이, NDPA 프레임(922)(예컨대, 1로 설정된 예비 서브필드(432) 내의 브로드캐스트 비트를 가짐)은 응답자(910)에 의해 전송될 수 있다. 예컨대, NDPA 프레임(922) 내의 예비 서브필드(432)(도 4b)의 제1 비트는, 바로 후속하는 NDP 프레임(925)이 레인징을 위해 사용되어야 한다는 것을 개시자(905)에 나타내기 위해 응답자(910)에 의해 사용될 수 있다. 또한, NDPA 프레임(922) 내의 예비 서브필드(432)(도 4b)의 제2 비트는, 응답자(910)가 레인징 정보를 공유할 수 있음을 개시자(905)에게 나타내기 위해 응답자(910)에 의해 사용될 수 있다.
[00140]
NDPA 프레임(922)은, NDPA 프레임(922)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T3(924)에서 NDP 프레임(925)의 송신이 후속될 수 있다. 응답자는 시간 T3(924)에서 NDP 프레임(925)의 송신 시간을 기록할 수 있다. 개시자(905)는 시간 T4(926)에서 NDP 프레임(925)의 수신 시간을 기록할 수 있다.
[00141]
응답자(910)는, 시간 T2(916), 시간 T3(924) 및 CFI를 포함할 수 있는 FTM 프레임(928)으로 NDP 프레임(918)에 응답할 수 있다. 개시자(905)는 Ack(Acknowledgment) 메시지(930)로 응답할 수 있다. 또한, 개시자(905)는 시간 T1(920), 시간 T4(926) 및 CFI를 포함할 수 있는 FTM 프레임(932)으로 NDP 프레임(925)에 응답할 수 있다. 응답자(910)는 Ack(Acknowledgment) 메시지(934)로 응답할 수 있다. 일부 실시예들에서, RTT, TDOA 및/또는 다른 계산들은 기록 및 수신된 정보에 기반하여 개시자(905) 및/또는 응답자(910)에 의해 수행될 수 있다.
[00142]
일부 실시예들에서, (도 9a에 도시된 바와 같이) FTM 프레임(928)을 전송하는 대신에, 응답자(910)는, 1로 설정된 FTM Ack 비트를 갖고, 시간 T2(916), 시간 T3(924) 및 CFI를 갖는 FTM No Ack 프레임을 전송할 수 있고; 개시자(905)는 시간 T1(920), 시간 T4(926) 및 CFI를 포함하는(Ack 프레임(930) 대신에) FTM Ack 프레임으로 응답할 수 있다. 따라서, Ack 프레임들(930 및 934)이 제거될 수 있고, 이로써 RTT, TDOA 및/또는 FTM 세션들에 관련된 다른 계산들에 대한 정보의 교환을 가속(speed up)할 수 있다.
[00143]
도 9b는 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 메시지 흐름을 도시한다.
[00144]
도 9b에 도시된 바와 같이, NDPA 프레임(942)은 시간 T1(941)에서 개시자(945)에 의해 전송될 수 있다. NDPA 프레임(942)은, NDPA 프레임(942)의 송신의 종료로부터 측정된 SIFS(914)로 주어진 시간 인터벌 후에 시간 T1'(942)에서 프레임(944)의 송신이 후속될 수 있다. 개시자(945)는 NDPA 프레임(942)의 송신 시간(T1) 및 프레임(944)의 송신 시간(T1')을 기록할 수 있다. 일부 실시예들에서, 프레임(944)은 시간 T1(947)을 갖는 NDP_az 프레임, 또는 NDP 프레임(944) 또는 BRP(Beam Refinement Protocol) 프레임 중 하나일 수 있다. NDPA 프레임(942)은 시간 T2(943)에서 응답자(950)에 의해 수신될 수 있는 반면에, 프레임(944)은 시간 T2'(949)에서 응답자(950)에 의해 수신될 수 있다.
[00145]
응답자(950)는 FTM No Ack 프레임(948)에 프레임(942)으로 응답할 수 있다. FTM No Ack 프레임(948)은 1로 설정된 FTM Ack 비트를 가질 수 있다. FTM No Ack 프레임(948)은 시간 T2(943), 시간 T2'(949), CFI 및 시간 T3(948) 정보를 포함할 수 있다. 응답자(950)는 FTM No Ack 프레임(948)의 송신 시간 T3(946)을 기록할 수 있다. 일부 실시예들에서, FTM No Ack 프레임(948)은 AoD, AoA, 방위각 또는 범위 정보를 요청할 수 있다.
[00146]
일부 실시예들에서, FTM 요청 프레임은, 대안적으로, AoD, AoA, 방위각 또는 범위 정보를 요청하는 데 사용될 수 있다. AoD, AoA, 방위각 및/또는 범위 정보를 요청하는 FTM 요청 프레임이 FTM No Ack 프레임 대신에 전송되는 실시예들에서, 이어서, Ack 프레임은 (FTM ACK 프레임 대신에) 응답자(950)에 의해 전송될 수 있다.
[00147]
개시자(945)는 FTM Ack 프레임(948)의 도착 시간 T4(952)를 기록할 수 있다. 개시자(945)는, ACK를 포함하는 FTM Ack 프레임(956)으로 응답할 수 있다. 일부 실시예들에서, FTM ACK 프레임(956)은 AoD, AoA, 방위각 및 범위 정보 중 하나 또는 그 초과를 포함할 수 있다. 일부 실시예들에서, FTM ACK 프레임(956)에 포함된 정보는 FTM 프레임(948)에서 요청된 정보에 부분적으로 기반할 수 있다. 응답자(950)는 Ack 메시지(956)의 도착 시간 T6(958)을 기록할 수 있다.
[00148]
개시자(945) 및 응답자(950)가 동기화될 때 비행 시간은 (a) 시간들 T2(943) 및 T1(941)의 차이, 즉, (T2-T1); 또는 (b)  로 계산될 수 있다. 개시자(945) 및 응답자(950)가 동기화되지 않을 때, TOF는
로 계산될 수 있다. 개시자(945) 및 응답자(950)가 동기화되지 않을 때, TOF는  로 계산될 수 있다.
로 계산될 수 있다.
[00149]
도 9c는 개시자(예컨대, AP(240))와 응답자(예컨대, UE(100)) 간의 예시적인 대칭적인 메시지 흐름을 도시하고, 여기서 NDPA는 대칭적인 요청을 통보한다.
[00150]
도 9c에 도시된 바와 같이, NDPA 프레임(972)은 개시자(975)에 의해 전송될 수 있다. NDPA 프레임(972)은, NDP 프레임(972)의 송신의 종료로부터 측정된 SIFS(973)로 주어진 시간 인터벌 후에 시간 T1(974)에서 NDP 프레임(976)의 송신이 후속될 수 있다. 예컨대, 예비 서브필드(432)(도 4b)의 제1 비트는, 바로 후속하는 NDP 프레임(976)이 레인징을 위해 사용되어야 한다는 것을 응답자(980)에게 나타내기 위해 개시자(975)에 의해 사용될 수 있다. 또한, NDPA 프레임(972)은 (유니캐스트를 나타내는) 단일 STA Info 필드(435)를 포함할 수 있고, RA 필드(420)는 응답자(980)의 어드레스로 설정될 수 있다. 개시자는 시간 T1에서 NDP 프레임(972)의 송신 시간을 기록할 수 있다. 응답자(980)는 시간 T2(978)에서 NDP 프레임(972)의 수신 시간을 기록할 수 있다.
[00151]
또한, 도 9c에 도시된 바와 같이, NDPA 프레임(984)은 응답자(980)에 의해 전송될 수 있다. NDPA 프레임(984)은, NDPA(984)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T3(982)에서 NDP 프레임(988)의 송신이 후속될 수 있다. 예컨대, NDPA 프레임(984) 내의 예비 서브필드(432)(도 4b)의 제1 비트는, 바로 후속하는 NDP 프레임(988)이 레인징을 위해 사용되어야 한다는 것을 개시자(975)에게 나타내기 위해 응답자(980)에 의해 사용될 수 있다. 또한, NDPA 프레임(984) 내의 예비 서브필드(432)(도 4b)의 제2 비트는, 응답자(980)가 레인징 정보를 공유할 수 있음을 개시자(975)에게 나타내기 위해 응답자(980)에 의해 사용될 수 있다. 응답자(980)는 시간 T3(982)에서 NDP 프레임(988)의 송신 시간을 기록할 수 있다. 개시자(975)는 시간 T4(986)에서 NDP 프레임(988)의 수신 시간을 기록할 수 있다.
[00152]
응답자(980)는, 시간 T2(978), 시간 T3(982), AoA 및 AoD를 포함할 수 있는 FTM 프레임(990)으로 NDP 프레임(976)에 응답할 수 있다. 개시자(975)는 Ack(Acknowledgment) 메시지(992)로 응답할 수 있다. 또한, 개시자(975)는, 시간 T1(974), 시간 T4(986), AoA 및 AoD를 포함할 수 있는 FTM 프레임(994)으로 NDP 프레임(988)에 응답할 수 있다. 응답자(980)는 Ack 메시지(996)로 응답할 수 있다. 일부 실시예들에서, RTT, TDOA 및/또는 다른 계산들은, 기록되고 수신된 정보에 기반하여 개시자(975) 및/또는 응답자(980)에 의해 수행될 수 있다.
[00153]
일부 실시예들에서, (도 9c에 도시된 바와 같이) FTM 프레임(990)을 전송하는 대신에, 응답자(980)는 시간 T2(978), 시간 T3(982), AoA 및 AOD를 갖고 1로 설정된 FTM Ack 비트를 갖는 FTM No Ack 프레임을 전송할 수 있고, 개시자(975)는 시간 T1(974), 시간 T4(986), AoA 및 AoD를 포함하는 (Ack 메시지(992) 대신에) FTM Ack 프레임으로 응답할 수 있다. 따라서, Ack 메시지들(992 및 996)이 제거될 수 있고, 이로써 RTT, TDOA 및/또는 FTM 세션들에 관련된 다른 계산들에 대한 정보의 교환을 가속한다.
[00154]
도 10은, FTM 응답자가 정보를 공유하지 않고 FTM 개시자들이 다수인 멀티캐스트 비-대칭적인 메시지 흐름(1000)을 도시한다. 예컨대, NDPA 프레임(1020)의 예비 서브필드(432)(도 4b)의 제1 비트는, 바로 후속하는 프레임(1040)이 레인징을 위해 사용되어야 한다는 것을 FTM 개시자들에게 나타내기 위해 FTM 응답자(1015)에 의해 사용될 수 있다. 또한, NDPA 프레임(1020) 내의 예비 서브필드(432)(도 4b)의 제2 비트는, FTM 응답자(1015)가 레인징 정보를 공유하지 않는다는 것을 FTM 개시자들에게 나타내기 위해 FTM 응답자(1015)에 의해 사용될 수 있다. 도 10에 도시된 바와 같이, NDPA 프레임(1020)은 시간 T1(1025)에서 FTM 응답자 1(1015)에 의해 전송될 수 있다. FTM 응답자 1(1015)은 시간 T1(1025)에서 NDPA 프레임의 송신 시간을 기록할 수 있다. NDPA 프레임(1020)은 시간 T2(1030)에서 FTM 개시자 1(1010)에 의해 수신될 수 있다. 시간 T2(1030)는 FTM 개시자(1010)에 의해 기록될 수 있다.
[00155]
NDPA 프레임(1020)은, NDPA 프레임(1020)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T1_1(1035)에서 프레임(1040)의 (FTM 응답자 1(1015)에 의한) 송신이 후속될 수 있다. 프레임(1040)은 시간 T1_1(1035)을 갖는 NDP_az 프레임, NDP 프레임, 또는 BRP(Beam Refinement Protocol) 프레임의 형태를 취할 수 있다. 프레임(1040)은 시간 T2_1(1045)에서 FTM 개시자 1(1010)에 의해 수신될 수 있다. 시간 2_1(1045)은 FTM 개시자 1(1010)에 의해 기록될 수 있다.
[00156]
프레임(1040)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_1(1055)에서, FTM 개시자 1(1010)은 응답자 1의 CFI(CFI_1), 시간 T2_1(1045) 및 시간 T3_1(1055)을 갖는 CBF(1060)를 송신할 수 있다. CBF(1060)는 시간 T4_1(1065)에서 FTM 응답자 1(1015)에 의해 수신될 수 있다.
[00157]
SIFS 시간 인터벌 후에, FTM 응답자 1(1015)은 FTM 개시자 k(1005)의 BSSID를 갖는 빔포밍 보고 폴(BSSID k) 프레임(1090)을 송신할 수 있으며, 여기서 k ≥ 2는 몇몇의 정수이다. FTM 개시자 k(1005)는 시간 T2_k(1050)에서 빔포밍 보고 폴(BSSID k) 프레임(1090)을 수신할 수 있다. 프레임(1090)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_k(1085)에서, FTM 개시자 k(1005)는 CFI_k, 시간 T2_k(1050) 및 시간 3_k(1075)를 갖는 CBF(1075)를 송신할 수 있다. CBF(1070)는 시간 T4_k(1080)에서 FTM 응답자 1에 의해 수신될 수 있다. 일부 실시예들에서, 도 10의 메시지 교환에 도시된 바와 같이, 시간 T4_k(1080)는 FTM 개시자 k로 전송되지 않을 수 있다.
[00158]
도 11은, FTM 응답자가 정보를 공유하고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1100)을 도시한다. 도 11에 도시된 바와 같이, NDPA 프레임(1120)은 시간 T1(1125)에서 FTM 응답자 1(1115)에 의해 전송될 수 있다. FTM 응답자 1은 시간 T1(1125)에서 NDPA 프레임의 송신 시간을 기록할 수 있다. NDPA 프레임(1120)은 시간 T2(1130)에서 FTM 개시자 1(1110)에 의해 수신될 수 있다. 시간 T2(1130)는 FTM 개시자(1110)에 의해 기록될 수 있다.
[00159]
NDPA 프레임(1120)은, NDPA 프레임(1120)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T1_1(1135)에서 프레임(1140)의 (FTM 응답자 1(1115)에 의한) 송신이 후속될 수 있다. 프레임(1140)은 시간 T1_1(1135)을 갖는 NDP_az 프레임, NDP 프레임 또는 BRP 프레임의 형태를 취할 수 있다. 프레임(1140)은 시간 T2_1(1145)에서 FTM 개시자 1(1110)에 의해 수신될 수 있다. 시간 2_1(1145)는 FTM 개시자 1(1110)에 의해 기록될 수 있다.
[00160]
프레임(1140)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_1(1155)에서, FTM 개시자 1(1110)은 CFI_1, 시간 T2_1(1145) 및 시간 T3_1(1155)을 갖는 CBF(1160)를 송신할 수 있다. CBF(1160)는 시간 T4_1(1165)에서 FTM 응답자 1(1115)에 의해 수신될 수 있다.
[00161]
SIFS 시간 인터벌 후에, FTM 응답자 1(1115)은 FTM 개시자 k(1105)의 BSSID, 및 T4_k를 갖는 빔포밍 보고 폴(BSSID k, T4_(k-1)) 프레임(1190)을 전송할 수 있으며, 여기서 k ≥ 2는 몇몇의 정수이다. 예컨대, SIFS 시간 인터벌 후에, FTM 응답자 1(1115)은 FTM 개시자 k=2의 BSSID 및 T4_1을 갖는 빔포밍 보고 폴(BSSID k=2, T4_1) 프레임(1190)을 송신할 수 있다.
[00162]
FTM 개시자 k(1105)는 시간 T2_k(1150)에서 빔포밍 보고 폴(BSSID k, T4_(k-1)) 프레임(1190)을 수신할 수 있다. 프레임(1190)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_k(1185)에서, FTM 개시자 k(1105)는 CFI_k, 시간 T2_k(1150) 및 시간 T3_k(1175)를 갖는 CBF(1175)를 송신할 수 있다. CBF(1170)은 시간 T4_k(1180)에서 FTM 응답자 1에 의해 수신될 수 있다.
[00163]
CBF(1175)의 수신의 종료에 후속하는 SIFS 시간 인터벌 후에, FTM 응답자 1(1115)은 프레임(1195)을 송신할 수 있다. 프레임(1195)은 시간 T4_k(1180)을 갖는 FTM ACK 프레임 또는 시간 T4_k(1180)를 갖는 빔포밍 보고 폴(NULL, T4_k) 프레임의 형태를 취할 수 있다.
[00164]
제 k FTM 개시자(RTT_k)에 대한 왕복 시간은 FTM 응답자 1(1115) 및 FTM 개시자 k(1105) 둘 모두에 의해  로서 컴퓨팅될 수 있다.
로서 컴퓨팅될 수 있다.
[00165]
도 12는, 레인징 비트가 설정되고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1200)을 도시한다. 도 12에 도시된 바와 같이, NDPA 프레임은 시간 T1(1225)에서 FTM 응답자 1(1215)에 의해 전송될 수 있다. FTM 응답자 1은 시간 T1(1225)에서 NDPA 프레임의 송신 시간을 기록할 수 있다. NDPA 프레임(1220)은 시간 T2(1230)에서 FTM 개시자 1(1210)에 의해 수신될 수 있다. 시간 T2(1230)는 FTM 개시자(1210)에 의해 기록될 수 있다.
[00166]
NDPA 프레임(1220)은, NDPA 프레임(1220)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에, 시간 T1_1(1235)에서, 프레임(1240)의 (FTM 응답자 1(1215)에 의한) 송신이 후속될 수 있다. 프레임(1240)은 시간 T1_1(1235)을 갖는 NDP_az 프레임, NDP 프레임 또는 BRP 프레임의 형태를 취할 수 있다. 프레임(1240)은 시간 T2_1(1245)에서 FTM 개시자 1(1210)에 의해 수신될 수 있다. 시간 2_1(1245)는 FTM 개시자 1(1210)에 의해 기록될 수 있다.
[00167]
프레임(1240)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_1(1255)에서, FTM 개시자 1(1210)은 CFI_1, 시간 T2_1(1245) 및 시간 T3_1(1255)을 갖는 CBF(1260)를 송신할 수 있다. CBF(1260)는 시간 T4_1(1265)에서 FTM 응답자 1(1215)에 의해 수신될 수 있다.
[00168]
SIFS 시간 인터벌 후에, FTM 응답자 1(1215)은 FTM 개시자 k(1205)의 BSSID 및 시간 T4(k-1)(1265)를 갖는 빔포밍 보고 폴(개시자 k의 BSSID, T4_(k-1)) 프레임(1290)을 송신할 수 있으며, 여기서 k ≥ 2는 몇몇의 정수이다. 예컨대, SIFS 시간 인터벌 후에, FTM 응답자 1(1215)은 FTM 개시자 k=2의 BSSID 및 T4_1을 갖는 빔포밍 보고 폴(BSSID k=2, T4_1) 프레임(1190)을 송신할 수 있다.
[00169]
FTM 개시자 k(1205)는 시간 T2_k(1250)에서 빔포밍 보고 폴(개시자 k의 BSSID, T4_(k-1)) 프레임(1290)을 수신할 수 있다. 프레임(1290)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_k(1285)에서, FTM 개시자 k(1205)는 CFI_k, 시간 T2_k(1250) 및 시간 3_k(1275)를 갖는 CBF(1275)를 송신할 수 있다. CBF(1270)는 시간 T4_k(1280)에서 FTM 응답자 1에 의해 수신될 수 있다.
[00170]
CBF(1275)의 수신의 종료에 후속하는 SIFS 시간 인터벌 후에, FTM 응답자 1(1215)은 프레임(1295)을 송신할 수 있다. 프레임(1295)은 FTM ACK 프레임의 형태를 취할 수 있다. 일부 실시예들에서, FTM ACK 프레임(1295)은 FTM 프레임과 포맷이 유사할 수 있지만, FTM 개시자들에게 브로드캐스팅되고 FTM 개시자들에 의해 히어링될 수 있다.
[00171]
T4_k 후의 시간에서, FTM 응답자 1(1215)은 T1_1, T4_1…T1_k, T4_k, AoA_1…AoA_k, AoD_1…AoD_k, 범위_1…범위_k, LCI_1…LCI_k 및 방위각 1…방위각_k을 갖는 FTM ACK 프레임(1295)을 송신할 수 있다. 일부 실시예들에서, FTM Ack 프레임(1295)은 각각의 FTM 개시자에 대한 AOD, AOA를 포함하는 브로드캐스트 프레임일 수 있다. AoA_j는 FTM 개시자 j로부터의 CBF 프레임의 도착 각도를 나타낸다. AoD_j는 FTM 개시자 j로부터의 CBF 프레임의 출발 각도를 나타낸다. 범위_j, LCI_j 및 방위각_j는 각각 FTM 개시자 j에 대한 범위, 위치 컨텍스트 식별자 및 방위각이고, 여기서 1 ≤ j ≤ k 이다. 일부 실시예들에서, FTM Ack 프레임(1295)은 CFI_k 및 FTM 개시자 k에 관련된 다른 정보를 갖는 CBF의 수신의 SIFS 시간 인터벌 내에서 전송되지 않을 수 있다. 일부 실시예들에서, FTM Ack 프레임(1295)은 다양한 FTM 개시자들에 관련된 정보를 포함하는 벡터 엔트리들을 포함할 수 있다.
[00172]
제 k FTM 개시자(RTT_k)에 대한 왕복 시간은 FTM 응답자 1(1215) 및 FTM 개시자 k(1205) 둘 모두에 의해  로 컴퓨팅될 수 있다.
로 컴퓨팅될 수 있다.
[00173]
도 13은, (예컨대, 도 4b의 예비 서브필드(432) 내의) 레인징 비트가 설정되지 않고 개시자들이 다수인 멀티캐스트 대칭적인 메시지 흐름(1300)을 도시한다. 도 13에 도시된 바와 같이, NDPA 프레임(1320)은 시간 T1(1325)에서 FTM 응답자 1(1315)에 의해 전송될 수 있다. FTM 응답자 1(1315)은 시간 T1(1325)에서 NDPA 프레임의 송신 시간을 기록할 수 있다. NDPA 프레임(1320)은 시간 T2(1330)에서 FTM 개시자 1(1310)에 의해 수신될 수 있다. 시간 T2(1330)는 FTM 개시자(1310)에 의해 기록될 수 있다.
[00174]
NDPA 프레임(1320)은, NDPA 프레임(1320)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T1_1(1335)에서 프레임(1340)의 (FTM 응답자 1(1315)에 의한) 송신이 후속될 수 있다. 프레임(1340)은 시간 T1_1(1335)을 갖는 NDP_az 프레임, NDP 프레임 또는 BRP 프레임의 형태를 취할 수 있다. 프레임(1340)은 시간 T2_1(1345)에서 FTM 개시자 1(1310)에 의해 수신될 수 있다. 시간 2_1(1345)는 FTM 개시자 1(1310)에 의해 기록될 수 있다.
[00175]
프레임(1340)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_1(1355)에서, FTM 개시자 1(1310)은 CFI_1, 시간 T2_1(1345) 및 시간 T3_1(1355)을 갖는 CBF(1360)를 송신할 수 있다. CBF(1360)는 시간 T4_1(1365)에서 FTM 응답자 1(1315)에 의해 수신될 수 있다.
[00176]
SIFS 시간 인터벌 후, 시간 T1_k(1370)에서, FTM 응답자 1(1315)은 FTM 개시자 k(1305)의 BSSID 및 시간 T4_1(1365)을 갖는 빔포밍 보고 폴(개시자 k의 BSSID, T4_(k-1))(1390)을 송신할 수 있고, 여기서 k ≥ 2는 몇몇의 정수이다. FTM 개시자 k(1305)는 시간 T2_k(1350)에서 빔포밍 보고 폴(개시자 k의 BSSID, T4_(k-1)) 프레임(1390)을 수신할 수 있다. 프레임(1390)의 수신의 종료에 후속하는 SIFS 인터벌 후에, 시간 T3_k(1385)에서, FTM 개시자 k(1305)는 CFI_k, 시간 T2_k(1350) 및 시간 3_k(1375)를 갖는 CBF(1375)를 송신할 수 있다. CBF(1370)는 시간 T4_k(1380)에서 FTM 응답자 1에 의해 수신될 수 있다.
[00177]
일부 실시예들에서, 시간 T4_K(1380) 후에, FTM 개시자 1(1310)은 피드백 정보(1391)에 대한 FTM 요청을 송신할 수 있고, FTM 응답자 1(1315)은 FTM 개시자 1(1310)에 대한 시간 T1_1(1335), 시간 T4_1(1365), AoA_1, AoD_1, 범위_1, LCI_1, 방위각_1을 포함하는 정보를 갖는 FTM 프레임(1392)으로 응답할 수 있다. FTM 개시자 1은 Ack 프레임(1393)으로 응답할 수 있다.
[00178]
마찬가지로, 피드백 정보를 요구하는 임의의 FTM 개시자 k는 피드백 정보(1395)에 대한 FTM 요청을 송신할 수 있고, FTM 응답자 1(1315)은 FTM 개시자 k(1305)에 대한 시간 T1_k(1370), 시간 T4_k(1380), AoA_k, AoD_k, 범위_k, LCI_k, 방위각_k를 포함하는 정보를 갖는 FTM 프레임(1394)으로 응답할 수 있다. FTM 개시자 k는 Ack 프레임(1396)으로 응답할 수 있다.
[00179]
제 k FTM 개시자에 대한 왕복 시간(RTT_k)은 FTM 응답자 1(1315) 및 FTM 개시자 k(1305) 둘 모두에 의해  로 컴퓨팅될 수 있다.
로 컴퓨팅될 수 있다.
[00180]
도 13에서, 피드백은, 피드백 정보의 수신을 통한 FTM 개시자 제어를 가능하게 하는, 각각의 FTM 개시자에 대한 유니캐스트 FTM 세션들의 형태이다. 예컨대, FTM 개시자들은, 자신들이 피드백 정보를 수신할지 여부를 제어할 수 있다.
[00181]
도 14a는 모든 개시자들에 대한 정보가 SIFS 인터벌 내에서 수신되고 개시자들이 다수인 멀티캐스트 대칭적인 OFDMA(Orthogonal Frequency Division Multiple Access) 메시지 흐름(1400)을 도시한다. 도 14a에서, 응답자는 정보를 공유하지 않는다. 도 14a에서, OFDMA가 사용되고, 개시자들과 응답자들 간의 동기화는 개시자들과 응답자들 사이의 정보 및/또는 프레임들의 교환들에 의해 가능하게 될 수 있다. 이와 대조적으로, 응답자들에 의해 시간 다중화된 응답들을 사용하여 AP로부터의 다중-사용자 NDP 프레임에 응답하는 일부 방식들은 AP의 송신의 부재로 인해 적절한 동기화를 유지하는 데 실패할 수 있다.
[00182]
도 14a에 도시된 바와 같이, NDPA 프레임(1420)(예컨대, 1로 설정된 예비 서브필드(432) 내의 브로드캐스트 비트를 가짐)은 응답자 1(1415)에 의해 전송될 수 있다. NDPA 프레임(1420)은 개시자들 k(1405)를 통해 개시자 1(1410)에 의해 수신될 수 있다.
[00183]
NDPA 프레임(1320)은, NDPA 프레임(1420)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T1(1425)에서 NDP 프레임(1440)의 (응답자 1(1415)에 의한) 송신이 후속될 수 있다. NDP 프레임(1440)은 T2_1, T2_2,… T2_k로 각각 주어진 시간들에서 개시자들 k에 의해 수신될 수 있다.
[00184]
NDP 프레임(1440)의 송신의 종료로부터 SIFS 인터벌 후에, 트리거 프레임(1460)은 시간 T1t(1465)에서 응답자 1(1415)에 의해 송신되고, T2t_1(1445), T2t_2,…T2t_k(1450)로 각각 주어진 시간들에서 개시자들 k에 의해 수신될 수 있다.
[00185]
트리거 프레임(1460)의 수신의 종료로부터 SIFS 인터벌 후에, CBF 프레임들, CBF(CFI1)(1490), CBF(CFI2),…CBF(CFI_k)(1475)는 시간들 t3_1(1455), t3_2,…t3_k(1485)에서 송신될 수 있다. CBF 프레임들은 시간들 T4_1(1480), T4_2,…T4_k(1470)에서 응답자 1(1415)에 의해 수신된다. 일부 실시예들에서, CBF 프레임들은 OFDMA 또는 업링크 다중-사용자 MIMO(UL MU-MIMO)를 사용하여 다중화될 수 있다.
[00186]
제 k 개시자 RTT_k에 대한 왕복 시간은 응답자 1(1415)에 의해  로 컴퓨팅될 수 있다.
로 컴퓨팅될 수 있다.
[00187]
도 14b는 모든 개시자들에 대한 정보가 SIFS 인터벌 내에서 수신되는 개시자들이 다수인 멀티캐스트 대칭적인 OFDMA(Orthogonal Frequency Division Multiple Access) 메시지 흐름(1487)을 도시한다. 도 14b는 도 14a에 도시된 메시지 흐름에 대해 몇몇의 추가적인 메시지 교환들을 도시한다. 도 14a와 공통인 메시지 흐름들 및 엘리먼트들은 도 14a에서 사용된 동일한 참조 번호들로 식별되었다.
[00188]
도 14b에서, 응답자는 정보를 공유한다(예컨대, 도 4b의 예비 서브필드(432)의 비트가 설정될 수 있다). 도 14b에서, OFDMA가 사용되고, 개시자들과 응답자들 간의 동기화는 개시자들과 응답자들 간의 정보 및/또는 프레임들의 교환에 의해 가능하게 될 수 있다. 이와 대조적으로, 응답자들에 의해 시간 다중화된 응답들을 사용하여 AP로부터의 다중-사용자 NDP 프레임에 응답하는 일부 방식들은 AP의 송신의 부재로 인해 적절한 동기화를 유지하는 데 실패할 수 있다.
[00189]
도 14b에 도시된 바와 같이, NDPA 프레임(1420)(예컨대, 1로 설정된 예비 서브필드(432) 내의 브로드캐스팅 비트를 가짐)은 응답자 1(1415)에 의해 전송될 수 있다. NDPA 프레임(1420)은 개시자들 k(1405)를 통해 개시자 1(1410)에 의해 수신될 수 있다.
[00190]
NDPA 프레임(1320)은, NDPA 프레임(1420)의 송신의 종료로부터 측정된 SIFS로 주어진 시간 인터벌 후에 시간 T1(1425)에서 NDP 프레임(1440)의 (응답자 1(1415)에 의한) 송신이 후속될 수 있다. NDP 프레임(1440)은 T2_1, T2_2,… T2_k로 각각 주어진 시간들에서 개시자들 k에 의해 수신될 수 있다.
[00191]
NDP 프레임(1440)의 송신의 종료로부터 SIFS 인터벌 후에, 트리거 프레임(1460)은 시간 T1t(1465)에서 응답자 1(1415)에 의해 송신되고, T2t_1(1445), T2t_2,…T2t_k(1450)로 각각 주어진 시간들에서 개시자들 k에 의해 수신될 수 있다.
[00192]
트리거 프레임(1460)의 수신의 종료로부터 SIFS 인터벌 후에, CBF 프레임들, CBF(CFI1)(1490), CBF(CFI2),…CBF(CFI_k)(1475)는 시간들 t3_1(1455), t3_2,…t3_k(1485)에서 송신될 수 있다. CBF 프레임은 시간들 T4_1(1480), T4_2,…T4_k(1470)에서 응답자 1(1415)에 의해 수신된다. 일부 실시예들에서, CBF 프레임들은 OFDMA 또는 업링크 다중-사용자 MIMO(UL MU-MIMO)를 사용하여 다중화될 수 있다.
[00193]
응답자 1(1415)은 시간 T1t(1465), T4_1(1480), AoA, AoD, 방위각을 갖고 설정된 FTM Ack 비트를 갖는 FTM No Ack 프레임(1491)을 개시자 1(1410)로 송신한다. 개시자(1415)는 시간 T2t_1(1445) 및 시간 T3_1(1455)을 갖는 FTM Ack 프레임(1493)으로 응답한다.
[00194]
마찬가지로, 응답자 1(1415)은 시간 T1t(1465), T4_k(1470), AoA, AoD, 방위각을 갖고 설정된 FTM Ack 비트를 갖는 FTM No Ack 프레임(1495)을 개시자 k(1405)로 송신할 수 있다. 개시자 k(1405)는 시간 T2t_k(1450) 및 시간 T3_k(1485)를 갖는 FTM ack 프레임(1496)으로 응답한다. 제k 개시자(RTT_k)에 대한 왕복 시간은 개시자들 및 응답자들 둘 모두에 의해  로 컴퓨팅될 수 있다.
로 컴퓨팅될 수 있다.
[00195]
일부 실시예들에서, 도 5a, 5b, 5e, 6, 7a, 9a, 9b 및 9c 및 10-15에 도시된 메시지 흐름들은 도면들의 하나 또는 그 초과의 프로토콜들에 대한 지원을 표시하는, 통신 디바이스로부터 수신된 능력 정보에 기반하여 사용될 수 있다.
[00196]
도 15는 본원에 제시된 특정 실시예들에 따른, 개시자(예컨대, 제1 STA)와 응답자(하나 또는 그 초과의 제2 STA들/UE들) 간의 메시지 흐름을 위한 방법(1500)을 예시하는 예시적인 흐름도를 도시한다.
[00197]
일부 실시예들에서, 방법(1500)은, 블록(1510)에서, 제1 시간에서, 제1 NDPA 프레임을 하나 또는 그 초과의 제2 스테이션들(STA들)로 송신하는 단계를 포함할 수 있고, 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 또는 각도 정보를 포함한다는 것을 표시하는 제1 비트를 포함한다. 일부 실시예들에서, 제1 NDPA 프레임을 송신하는 단계는 제1 NDPA 프레임을 하나 또는 그 초과의 제2 STA들 내의 대응하는 STA로 유니캐스팅하는 단계를 포함할 수 있다. 일부 실시예들에서, 제1 NDPA 프레임을 송신하는 단계는 제1 NDPA 프레임을 하나 또는 그 초과의 제2 STA들로 브로드캐스팅하는 단계를 포함할 수 있다.
[00198]
블록(1520)에서, 제1 시간으로부터의 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임이 송신되고, 제2 프레임은 (a) NDP_az(Null Data Packet az) 프레임의 송신의 시간에 관한 정보를 갖는 NDP_az 프레임, 또는 (b) NDP(Null Data Packet) 프레임, 또는 (c) BRP(Beam Refinement Protocol) 프레임 중 하나이다.
[00199]
일부 실시예들에서, 제1 NDPA 프레임이 유니캐스팅되는 경우에, 방법(1500)은, 제1 STA에서, 제2 프레임에 대한 응답으로, 대응하는 STA로부터 FTM(Fine Timing Measurement) 프레임을 수신하는 단계를 더 포함할 수 있다. FTM 프레임은: 제1 STA에 의한 RTT(Round Trip Time) 계산들을 위한 제1 타이밍 정보 ― 제1 타이밍 정보는, 대응하는 STA에서 제2 프레임의 도착 시간, 또는 제1 FTM 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― ; 또는 제2 프레임의 AoA(Angle of Arrival), 또는 제2 프레임의 AoD(Angle of Departure); 또는 대응하는 STA에 대한 LCI(Location Context Identifier); 또는 제1 STA와 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드 중 적어도 하나를 포함할 수 있고, CFI 필드는 CFR(Channel Frequency Response) 정보, 또는 CIR(Channel Impulse Response) 정보, 또는 제2 프레임의 도착 정보를 갖는 CIR 정보의 서브세트, 또는 PDP(Power Delay Profile) 정보, 또는 제2 프레임에 대한 FAC(First Arrival Correction) 정보 중 하나를 포함한다. 또한, 일부 실시예들에서, FTM 프레임은 확인응답 응답(또는 FTM Ack) 비트를 포함할 수 있고, 확인응답 응답(FTM Ack) 비트는 제1 FTM 프레임에 대한 응답이 FTM Ack(FTM Acknowledgment) 프레임의 형태로 전송될 수 있다는 것을 표시한다. 방법은, 확인응답 응답 비트(또는 FTM Ack 비트)의 값에 부분적으로 기반하여, FTM Ack 프레임을 대응하는 STA로 송신하는 단계를 더 포함할 수 있고, FTM Ack 프레임은: 제2 타이밍 정보 ― 제2 타이밍 정보는, 제1 STA에서의 FTM 프레임의 도착 시간, 또는 제1 STA에 의한 FTM Ack 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― , 또는 FTM 프레임의 AoA 정보, 또는 FTM 프레임의 AoD 정보, 또는 대응하는 STA에 관한 방위각 정보, 또는 대응하는 STA에 관한 범위 정보 중 하나 또는 그 초과를 포함할 수 있다.
[00200]
일부 실시예들에서, 제1 NDPA 프레임이 유니캐스팅되는 경우에, 방법(1500)은, 제1 STA에서, 제2 프레임에 대한 응답으로, CBF(Compressed Beamforming) 프레임을 수신하는 단계를 더 포함할 수 있고, CBF 프레임은, 제1 STA와 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드, 또는 제1 STA에 의한 RTT(Round Trip Time) 계산들을 위한 타이밍 정보 중 하나 또는 그 초과를 포함하고, 타이밍 정보는, 대응하는 STA에서의 제2 프레임의 도착 시간, 또는 대응하는 STA에 의한 CBF 프레임의 송신 시간 중 하나 또는 그 초과를 포함한다.
[00201]
일부 실시예들에서, 제1 NDPA 프레임이 브로드캐스팅되는 경우에, 방법(1500)은, 제1 STA에서, 제2 프레임에 대한 응답으로, 하나 또는 그 초과의 제2 STA들 내의 제1 대응하는 STA로부터 제1 CBF(Compressed Beamforming) 프레임을 수신하는 단계를 더 포함할 수 있고, 여기서 제1 CBF 프레임은, 제1 STA와 하나 또는 그 초과의 제2 STA들 내의 제1 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 제1 대응하는 CFI(Channel Feedback Information) 필드, 제1 대응하는 STA에서의 제2 프레임의 수신 시간, 및 제1 STA로의 제1 CBF 프레임의 송신 시간을 포함할 수 있다. 방법은 하나 또는 그 초과의 BRP(Beamforming Report Poll) 프레임들을 송신하는 단계를 더 포함할 수 있고, 각각의 BRP 프레임은 하나 또는 그 초과의 제2 STA들 중 제2 대응하는 STA와 연관된 대응하는 BSS ID(Basic Service Set Identifier)를 포함한다.
[00202]
일부 실시예들에서, 방법은, 하나 또는 그 초과의 BRP 프레임들 각각에 대한 응답으로, 하나 또는 그 초과의 대응하는 제2 CBF 프레임들을 수신하는 단계를 더 포함할 수 있고, 각각의 대응하는 제2 CBF 프레임은 하나 또는 그 초과의 제2 STA들 중 제2 대응하는 STA로부터 수신되고, 각각의 대응하는 제2 CBF 프레임은, 제1 STA와 제2 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 제2 대응하는 CFI 필드, 제2 대응하는 STA에서의 대응하는 BRP 프레임의 수신 시간, 및 제1 STA로의 대응하는 제2 CBF 프레임의 송신 시간을 포함할 수 있다.
[00203]
일부 실시예들에서, 하나 또는 그 초과의 BRP 프레임들(예컨대, 마지막 수신된 BRP 프레임)에 대한 응답으로 마지막 제2 대응하는 STA로부터 수신되는 마지막 대응하는 제2 CBF 프레임의 수신 시에, 방법은, 마지막 대응하는 제2 CBF 프레임의 수신 시간을 갖는 FTM Ack(FTM Acknowledgment) 프레임, 또는 널 BSS ID 및 마지막 대응하는 제2 CBF 프레임의 수신 시간을 갖는 부가적인 BRP 프레임을 송신하는 단계를 더 포함할 수 있다.
[00204]
일부 실시예들에서, 하나 또는 그 초과의 BRP 프레임들(예컨대, 마지막 수신된 BRP 프레임)에 대한 응답으로 마지막 제2 대응하는 STA로부터 수신되는 마지막 대응하는 제2 CBF 프레임의 수신 시에, 방법은 FTM Ack(FTM Acknowledgment) 프레임을 브로드캐스팅하는 단계를 더 포함할 수 있고, FTM Ack 프레임은, 제2 프레임의 송신 시간, 제1 CBF 프레임의 수신 시간 및 대응하는 제2 CBF 프레임들 각각의 수신 시간들, 또는 제1 CBF 프레임에 대응하는 AoA(Angle of Arrival) 및 대응하는 제2 CBF 프레임들 각각의 도착 각도들, 또는 제1 CBF 프레임에 대응하는 AoD(Angle of Departure) 및 대응하는 제2 CBF 프레임들 각각의 출발 각도들, 또는 하나 또는 그 초과의 제2 STA들 각각에 대한 범위, 또는 LCI(Location Context Identifier), 또는 방위각 중 하나 또는 그 초과를 갖는다.
[00205]
일부 실시예들에서, 방법은, 하나 또는 그 초과의 제2 STA들 내의 제3 STA로부터, 정보에 대한 FTM(Fine Timing Measurement) 요청을 수신하는 단계를 더 포함할 수 있다. 예컨대, 정보에 대한 FTM 요청은 위의 FTM Ack 프레임의 송신/브로드캐스트 후에(예컨대, 마지막 대응하는 제2 CBF 프레임의 수신 시에) 수신될 수 있다. FTM 요청에 대한 응답으로, 방법은 FTM 프레임을 제3 STA로 송신하는 단계를 더 포함할 수 있고, FTM 프레임은, 제3 STA로의 대응하는 BRP 프레임의 송신 시간, 제3 STA로부터의 대응하는 제2 CBF 프레임의 수신 시간, 또는 제3 STA로부터의 대응하는 제2 CBF 프레임의 AoA(Angle of Arrival), 또는 제3 STA로부터의 대응하는 제2 CBF 프레임의 AoD(Angle of Departure), 또는 제3 STA에 대한 범위, 또는 LCI(Location Context Identifier), 또는 방위각 중 하나 또는 그 초과를 포함한다.
[00206]
위에 개시된 방법은 STA(100)(예컨대, AP들 및/또는 UE)에 의해 수행되고 그리고/또는 컴퓨터-판독 가능 매체 상에 구현되고, STA(100) 상의 프로세서에 의해 실행될 수 있다. 본 개시내용이 교육 목적으로 특정 실시예들과 관련하여 예시되지만, 실시예들은 이에 제한되지 않는다. 다양한 적응들 및 수정들이 본 설명의 범위에서 벗어나지 않고서 이루어질 수 있다. 따라서, 첨부된 청구항들의 사상 및 범위는 전술된 설명으로 제한되지 않아야 한다.
Claims (30)
- 제1 STA(station) 상에서의 방법으로서,
제1 시간에서, 제1 NDPA(Null Data Packet Announcement) 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하는 단계 ― 상기 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징(ranging) 정보를 포함한다는 것을 표시함 ― ; 및
상기 제1 시간으로부터 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하는 단계를 포함하고, 상기 제2 프레임은,
NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 상기 NDP_az 프레임, 또는
NDP(Null Data Packet) 프레임, 또는
BRP(Beam Refinement Protocol) 프레임 중 하나인,
제1 STA 상에서의 방법. - 제1 항에 있어서,
상기 제1 NDPA 프레임을 송신하는 단계는 상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 유니캐스팅하는 단계를 포함하고, 그리고
상기 제2 프레임을 송신하는 단계는 상기 제2 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 상기 대응하는 STA로 유니캐스팅하는 단계를 포함하는,
제1 STA 상에서의 방법. - 제2 항에 있어서,
상기 방법은, 상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 대응하는 STA로부터 FTM(Fine Timing Measurement) 프레임을 수신하는 단계를 더 포함하고, 상기 FTM 프레임은:
상기 제1 STA에 의한 RTT(Round Trip Time) 계산들을 위한 제1 타이밍 정보 ― 상기 제1 타이밍 정보는, 상기 대응하는 STA에서 상기 제2 프레임의 도착 시간, 또는 상기 FTM 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― ; 또는
상기 하나 또는 그 초과의 후속 프레임들이 각도 정보를 포함한다는 것을 상기 제1 NDPA 프레임이 추가로 표시할 때, 상기 제2 프레임의 AoA(Angle of Arrival), 또는 상기 제2 프레임의 AoD(Angle of Departure) 중 하나 또는 그 초과; 또는
상기 대응하는 STA에 대한 LCI(Location Context Identifier); 또는
상기 제1 STA와 상기 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드 중 적어도 하나를 갖고,
상기 CFI 필드는 CFR(Channel Frequency Response) 정보, 또는 CIR(Channel Impulse Response) 정보, 또는 상기 제2 프레임의 도착 정보를 갖는 상기 CIR 정보의 서브세트, 또는 PDP(Power Delay Profile) 정보, 또는 상기 제2 프레임에 대한 FAC(First Arrival Correction) 정보 중 하나를 포함하는,
제1 STA 상에서의 방법. - 제3 항에 있어서,
상기 FTM 프레임은 확인응답 응답 비트(acknowledgment response bit)를 포함하고, 상기 확인응답 응답 비트는 상기 FTM 프레임에 대한 응답이 FTM Ack(FTM Acknowledegment) 프레임의 형태로 전송될 수 있는지 여부를 표시하고, 상기 방법은,
상기 확인응답 응답 비트의 값에 부분적으로 기반하여, 상기 FTM Ack 프레임을 상기 대응하는 STA로 송신하는 단계를 더 포함하고, 상기 FTM Ack 프레임은:
제2 타이밍 정보 ― 상기 제2 타이밍 정보는, 상기 제1 STA에서의 상기 FTM 프레임의 도착 시간, 또는 상기 제1 STA에 의한 상기 FTM Ack 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― , 또는
상기 FTM 프레임의 AoA 정보, 또는
상기 FTM 프레임의 AoD 정보, 또는
상기 대응하는 STA에 관한 방위각 정보, 또는
상기 대응하는 STA에 관한 범위 정보 중 하나 또는 그 초과를 포함하는,
제1 STA 상에서의 방법. - 제2 항에 있어서,
상기 방법은, 상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, CBF(Compressed Beamforming) 프레임을 수신하는 단계를 더 포함하고, 상기 CBF 프레임은,
상기 제1 STA와 상기 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드, 또는
상기 제1 STA에 의한 RTT(Round Trip Time) 계산들에 대한 타이밍 정보 중 하나 또는 그 초과를 포함하고,
상기 타이밍 정보는, 상기 대응하는 STA에서의 상기 제2 프레임의 도착 시간, 또는 상기 대응하는 STA에 의한 상기 CBF 프레임의 송신 시간 중 하나 또는 그 초과를 포함하는,
제1 STA 상에서의 방법. - 제1 항에 있어서,
상기 제1 NDPA 프레임을 송신하는 단계는 상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들로 브로드캐스팅하는 단계를 포함하고, 그리고
상기 제2 프레임을 송신하는 단계는 상기 제2 프레임을 상기 하나 또는 그 초과의 제2 STA들로 브로드캐스팅하는 단계를 포함하는,
제1 STA 상에서의 방법. - 제6 항에 있어서,
상기 방법은, 상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 하나 또는 그 초과의 제2 STA들 내의 제1 대응하는 STA로부터 제1 CBF(Compressed Beamforming) 프레임을 수신하는 단계를 더 포함하고, 상기 제1 CBF 프레임은,
상기 제1 STA와 상기 하나 또는 그 초과의 제2 STA들 내의 상기 제1 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 제1 대응하는 CFI(Channel Feedback Information) 필드,
상기 제1 대응하는 STA에서의 상기 제2 프레임의 수신 시간, 및
상기 제1 STA로의 상기 제1 CBF 프레임의 송신 시간을 포함하는,
제1 STA 상에서의 방법. - 제7 항에 있어서,
상기 방법은 하나 또는 그 초과의 BRP(Beamforming Report Poll) 프레임들을 송신하는 단계를 더 포함하고, 각각의 BRP 프레임은 상기 하나 또는 그 초과의 제2 STA들 중 제2 대응하는 STA와 연관된 대응하는 BSS ID(Basic Service Set Identifier)를 포함하는,
제1 STA 상에서의 방법. - 제8 항에 있어서,
상기 방법은, 상기 하나 또는 그 초과의 BRP 프레임들 각각에 대한 응답으로, 하나 또는 그 초과의 대응하는 제2 CBF 프레임들을 수신하는 단계를 더 포함하고, 각각의 대응하는 제2 CBF 프레임은 상기 하나 또는 그 초과의 제2 STA들 중 제2 대응하는 STA로부터 수신되고, 각각의 대응하는 제2 CBF 프레임은,
상기 제1 STA와 상기 제2 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 제2 대응하는 CFI 필드,
상기 제2 대응하는 STA에서의 대응하는 BRP 프레임의 수신 시간, 및
상기 제1 STA로의 상기 대응하는 제2 CBF 프레임의 송신 시간을 포함하는,
제1 STA 상에서의 방법. - 제9 항에 있어서,
상기 하나 또는 그 초과의 제2 STA들 중 마지막 제2 대응하는 STA로부터 상기 하나 또는 그 초과의 BRP 프레임들에 대한 응답으로 수신되는 마지막 대응하는 제2 CBF 프레임의 수신 시에,
상기 마지막 대응하는 제2 CBF 프레임의 수신 시간을 갖는 FTM Ack(FTM Acknowledgment) 프레임, 또는
널(null) BSS ID 및 상기 마지막 대응하는 제2 CBF 프레임의 수신 시간을 갖는 부가적인 BRP 프레임 중 하나를 송신하는 단계를 더 포함하는,
제1 STA 상에서의 방법. - 제9 항에 있어서,
상기 방법은, 상기 하나 또는 그 초과의 제2 STA들 중 마지막 제2 대응하는 STA로부터 상기 하나 또는 그 초과의 BRP 프레임들에 대한 응답으로 수신되는 마지막 대응하는 제2 CBF 프레임의 수신 시에, FTM Ack(FTM Acknowledgment) 프레임을 브로드캐스팅하는 단계를 더 포함하고, 상기 FTM Ack 프레임은,
상기 제2 프레임의 송신 시간,
상기 제1 CBF 프레임의 수신 시간 및 상기 대응하는 제2 CBF 프레임들 각각의 수신 시간들, 또는
상기 제1 CBF 프레임에 대응하는 AoA(Angle of Arrival) 및 상기 대응하는 제2 CBF 프레임들 각각의 도착 각도들, 또는
상기 제1 CBF 프레임에 대응하는 AoD(Angle of Departure) 및 상기 대응하는 제2 CBF 프레임들 각각의 출발 각도들, 또는
상기 하나 또는 그 초과의 제2 STA들 각각에 대한 범위, 또는 LCI(Location Context Identifier), 또는 방위각 중 하나 또는 그 초과를 갖는,
제1 STA 상에서의 방법. - 제10 항에 있어서,
상기 방법은:
상기 하나 또는 그 초과의 제2 STA들 내의 제3 STA로부터, 정보에 대한 FTM(Fine Timing Measurement) 요청을 수신하는 단계; 및
상기 FTM 요청에 대한 응답으로, FTM 프레임을 상기 제3 STA로 송신하는 단계를 더 포함하고, 상기 FTM 프레임은,
상기 제3 STA로의 대응하는 BRP 프레임의 송신 시간,
상기 제3 STA로부터의 대응하는 제2 CBF 프레임의 수신 시간, 또는
상기 제3 STA로부터의 상기 대응하는 제2 CBF 프레임의 AoA(Angle of Arrival), 또는
상기 제3 STA로부터의 상기 대응하는 제2 CBF 프레임의 AoD(Angle of Departure), 또는
상기 제3 STA에 대한 범위, 또는 LCI(Location Context Identifier), 또는 방위각 중 하나 또는 그 초과를 포함하는,
제1 STA 상에서의 방법. - 제1 STA(station)로서,
메모리, 및
상기 메모리에 커플링된 프로세서를 포함하고, 상기 프로세서는:
제1 시간에서, 제1 NDPA(Null Data Packet Announcement) 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하고 ― 상기 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 정보를 포함한다는 것을 표시함 ― ; 그리고
상기 제1 시간으로부터 SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하도록 구성되고, 상기 제2 프레임은:
NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 상기 NDP_az 프레임, 또는
NDP(Null Data Packet) 프레임, 또는
BRP(Beam Refinement Protocol) 프레임 중 하나인,
제1 STA. - 제13 항에 있어서,
상기 프로세서는:
상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 유니캐스팅함으로써 상기 제1 NDPA 프레임을 송신하고; 그리고
상기 제2 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 유니캐스팅함으로써 상기 제2 프레임을 송신하도록 구성되는,
제1 STA. - 제14 항에 있어서,
상기 프로세서는 추가로,
상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 대응하는 STA로부터 FTM(Fine Timing Measurement) 프레임을 수신하도록 구성되고, 상기 FTM 프레임은:
상기 제1 STA에 의한 RTT(Round Trip Time) 계산들을 위한 제1 타이밍 정보 ― 상기 제1 타이밍 정보는, 상기 대응하는 STA에서의 상기 제2 프레임의 도착 시간, 또는 상기 FTM 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― , 또는
상기 하나 또는 그 초과의 후속 프레임들이 각도 정보를 포함한다는 것을 상기 제1 NDPA 프레임이 추가로 표시할 때, 상기 제2 프레임의 AoA(Angle of Arrival), 또는 상기 제2 프레임의 AoD(Angle of Departure) 중 하나 또는 그 초과, 또는
상기 대응하는 STA에 대한 LCI(Location Context Identifier), 또는
상기 제1 STA와 상기 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드 중 중 적어도 하나를 갖고,
상기 CFI 필드는 CFR(Channel Frequency Response) 정보, 또는 CIR(Channel Impulse Response) 정보, 또는 상기 제2 프레임의 도착 정보를 갖는 상기 CIR 정보의 서브세트, 또는 PDP(Power Delay Profile) 정보, 또는 상기 제2 프레임에 대한 FAC(First Arrival Correction) 정보 중 하나를 포함하는,
제1 STA. - 제15 항에 있어서,
상기 FTM 프레임은 확인응답 응답 비트를 포함하고, 상기 확인응답 응답 비트는 상기 FTM 프레임에 대한 응답이 FTM Ack(FTM Acknowledgment) 프레임의 형태로 전송될 수 있는지 여부를 표시하고, 상기 프로세서는 추가로,
상기 확인응답 응답 비트의 값에 부분적으로 기반하여, FTM Ack 프레임을 상기 대응하는 STA로 송신하도록 구성되고, 상기 FTM Ack 프레임은,
제2 타이밍 정보 ― 상기 제2 타이밍 정보는 상기 제1 STA에서 상기 FTM 프레임의 도착 시간, 또는 상기 제1 STA에 의한 상기 FTM Ack 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― , 또는
상기 FTM 프레임의 AoA 정보, 또는
상기 FTM 프레임의 AoD 정보, 또는
상기 대응하는 STA에 관한 방위각 정보, 또는
상기 대응하는 STA에 관한 범위 정보 중 하나 또는 그 초과를 포함하는,
제1 STA. - 제14 항에 있어서,
상기 프로세서는 추가로,
상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, CBF(Compressed Beamforming) 프레임을 수신하도록 구성되고, 상기 CBF 프레임은:
상기 제1 STA와 상기 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드, 또는
상기 제1 STA에 의한 RTT(Round Trip Time) 계산들에 대한 타이밍 정보 중 하나 또는 그 초과를 포함하고,
상기 타이밍 정보는, 상기 대응하는 STA에서의 상기 제2 프레임의 도착 시간, 또는 상기 대응하는 STA에 의한 상기 CBF 프레임의 송신 시간 중 하나 또는 그 초과를 포함하는,
제1 STA. - 제13 항에 있어서,
상기 프로세서는:
상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들로 브로드캐스팅함으로써 상기 제1 NDPA 프레임을 송신하고; 그리고
상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 브로드캐스팅함으로써 상기 제2 프레임을 송신하도록 구성되는,
제1 STA. - 제18 항에 있어서,
상기 프로세서는 추가로,
상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 하나 또는 그 초과의 제2 STA들 내의 제1 대응하는 STA로부터 제1 CBF(Compressed Beamforming) 프레임을 수신하도록 구성되고, 상기 제1 CBF 프레임은,
상기 제1 STA와 상기 하나 또는 그 초과의 제2 STA들 내의 상기 제1 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 제1 대응하는 CFI(Channel Feedback Information) 필드,
상기 제1 대응하는 STA에서의 상기 제2 프레임의 수신 시간, 및
상기 제1 STA로의 상기 제1 CBF 프레임의 송신 시간을 포함하는,
제1 STA. - 제19 항에 있어서,
상기 프로세서는 추가로,
하나 또는 그 초과의 BRP(Beamforming Report Poll) 프레임들을 송신하도록 구성되고,
각각의 BRP 프레임은 상기 하나 또는 그 초과의 제2 STA들 중 제2 대응하는 STA와 연관된 대응하는 BSS ID(Basic Service Set Identifier)를 포함하는,
제1 STA. - 제20 항에 있어서,
상기 프로세서는 추가로,
상기 하나 또는 그 초과의 BRP 프레임들 각각에 대한 응답으로, 대응하는 제2 CBF 프레임을 수신하도록 구성되고, 각각의 대응하는 제2 CBF 프레임은 상기 하나 또는 그 초과의 제2 STA들 중 상기 제2 대응하는 STA로부터 수신되고, 각각의 대응하는 제2 CBF 프레임은,
상기 제1 STA와 상기 제2 대응하는 STA 사이의 통신 채널에 관한 제2 대응하는 CFI 필드,
상기 제2 대응하는 STA에서의 대응하는 BRP 프레임의 수신 시간, 및
상기 제1 STA로의 상기 대응하는 제2 CBF 프레임의 송신 시간을 포함하는,
제1 STA. - 제21 항에 있어서,
상기 프로세서는 추가로,
상기 하나 또는 그 초과의 제2 STA들 중 마지막 제2 대응하는 STA로부터 상기 하나 또는 그 초과의 BRP 프레임들에 대한 응답으로 수신되는 마지막 대응하는 제2 CBF 프레임의 수신 시에,
상기 마지막 대응하는 제2 CBF 프레임의 수신 시간을 갖는 FTM Ack(FTM Acknowledgment) 프레임, 또는
널 BSS ID 및 상기 마지막 대응하는 제2 CBF 프레임의 수신 시간을 갖는 부가적인 BRP 프레임 중 하나를 송신하도록 구성되는,
제1 STA. - 제21 항에 있어서,
상기 프로세서는 추가로,
상기 하나 또는 그 초과의 제2 STA들 중 마지막 제2 대응하는 STA로부터 상기 하나 또는 그 초과의 BRP 프레임들에 대한 응답으로 수신되는 마지막 대응하는 제2 CBF 프레임의 수신 시에, FTM Ack(FTM Acknowledgment) 프레임을 브로드캐스팅하도록 구성되고, 상기 FTM Ack 프레임은,
상기 제2 프레임의 송신 시간,
상기 제1 CBF 프레임의 수신 시간 및 상기 대응하는 제2 CBF 프레임들 각각의 수신 시간들, 또는
상기 제1 CBF 프레임에 대응하는 AoA(Angle of Arrival) 및 상기 대응하는 제2 CBF 프레임들 각각의 도착 각도들, 또는
상기 제1 CBF 프레임에 대응하는 AoD(Angle of Departure) 및 상기 대응하는 제2 CBF 프레임들 각각의 출발 각도들, 또는
상기 하나 또는 그 초과의 제2 STA들 각각에 대한 범위, 또는 LCI(Location Context Identifier), 또는 방위각 중 하나 또는 그 초과를 갖는,
제1 STA. - 제22 항에 있어서,
상기 프로세서는 추가로:
상기 하나 또는 그 초과의 제2 STA들 내의 제3 STA로부터, 정보에 대한 FTM(Fine Timing Measurement) 요청을 수신하고; 그리고
상기 FTM 요청에 대한 응답으로, FTM 프레임을 상기 제3 STA로 송신하도록 구성되고, 상기 FTM 프레임은:
상기 제3 STA로의 대응하는 BRP 프레임의 송신 시간,
상기 제3 STA로부터의 대응하는 제2 CBF 프레임의 수신 시간, 또는
상기 제3 STA로부터의 상기 대응하는 제2 CBF 프레임의 AoA(Angle of Arrival), 또는
상기 제3 STA로부터의 상기 대응하는 제2 CBF 프레임의 AoD(Angle of Departure), 또는
상기 제3 STA에 대한 범위, 또는 LCI(Location Context Identifier), 또는 방위각 중 하나 또는 그 초과를 포함하는,
제1 STA. - 제1 STA(station)로서,
제1 NDPA(Null Data Packet Announcement) 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하기 위한 수단 ― 상기 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 정보를 포함한다는 것을 표시함 ― ; 및
SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하기 위한 수단을 포함하고, 상기 제2 프레임은,
NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 상기 NDP_az 프레임, 또는
NDP(Null Data Packet) 프레임, 또는
BRP(Beam Refinement Protocol) 프레임 중 하나인,
제1 STA. - 제25 항에 있어서,
상기 제1 NDPA 프레임을 송신하기 위한 수단은 상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 유니캐스팅하기 위한 수단을 포함하고, 그리고
상기 제2 프레임을 송신하기 위한 수단은 상기 제2 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 유니캐스팅하기 위한 수단을 포함하고,
상기 제1 STA는:
상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 대응하는 STA로부터 FTM(Fine Timing Measurement) 프레임을 수신하기 위한 수단을 더 포함하고, 상기 FTM 프레임은:
상기 제1 STA에 의한 RTT(Round Trip Time) 계산들을 위한 제1 타이밍 정보 ― 상기 제1 타이밍 정보는, 상기 대응하는 STA에서의 상기 제2 프레임의 도착 시간, 또는 상기 FTM 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― , 또는
상기 하나 또는 그 초과의 후속 프레임들이 각도 정보를 포함한다는 것을 상기 제1 NDPA 프레임이 추가로 표시할 때, 상기 제2 프레임의 AoA(Angle of Arrival), 또는 상기 제2 프레임의 AoD(Angle of Departure) 중 하나 또는 그 초과, 또는
상기 대응하는 STA에 대한 LCI(Location Context Identifier), 또는
상기 제1 STA와 상기 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드 중 적어도 하나를 갖고,
상기 CFI 필드는 CFR(Channel Frequency Response) 정보, 또는 CIR(Channel Impulse Response) 정보, 또는 상기 제2 프레임의 도착 정보를 갖는 상기 CIR 정보의 서브세트, 또는 PDP(Power Delay Profile) 정보, 또는 제2 프레임에 대한 FAC(First Arrival Correction) 정보 중 하나를 포함하는,
제1 STA. - 제25 항에 있어서,
상기 제1 NDPA 프레임을 송신하기 위한 수단은 상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들로 브로드캐스팅하기 위한 수단을 포함하고,
상기 제2 프레임을 송신하기 위한 수단은 상기 제2 프레임을 상기 하나 또는 그 초과의 제2 STA들로 브로드캐스팅하기 위한 수단을 포함하고,
상기 제1 STA는,
상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 하나 또는 그 초과의 제2 STA들 내의 제1 대응하는 STA로부터 제1 CBF(Compressed Beamforming) 프레임을 수신하기 위한 수단을 더 포함하고, 상기 제1 CBF 프레임은,
상기 제1 STA와 상기 하나 또는 그 초과의 제2 STA들 내의 상기 제1 대응하는 STA 사이의 통신 채널에 관한 제1 대응하는 CFI(Channel Feedback Information) 필드,
상기 제1 대응하는 STA에서의 상기 제2 프레임의 수신 시간, 및
상기 제1 STA로의 상기 제1 CBF 프레임의 송신 시간을 포함하는,
제1 STA. - 코드를 포함하는 비-일시적인 컴퓨터-판독 가능 저장 매체로서, 상기 코드는:
제1 NDPA(Null Data Packet Announcement) 프레임을 하나 또는 그 초과의 제2 STA들(stations)로 송신하고 ― 상기 제1 NDPA 프레임은, 하나 또는 그 초과의 후속 프레임들이 레인징 정보를 포함한다는 것을 표시함 ― ; 그리고
SIFS(Short Interval Frame Space) 시간 인터벌 후에, 제2 프레임을 송신하도록 프로세서에 의해 실행 가능하고, 상기 제2 프레임은,
NDP_az(Null Data Packet az) 프레임의 송신 시간에 관한 정보를 갖는 상기 NDP_az 프레임, 또는
NDP(Null Data Packet) 프레임, 또는
BRP(Beam Refinement Protocol) 프레임 중 하나인,
비-일시적인 컴퓨터-판독 가능 저장 매체. - 제28 항에 있어서,
상기 코드는,
상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 유니캐스팅함으로써 상기 제1 NDPA 프레임을 송신하고, 그리고
상기 제2 프레임을 상기 하나 또는 그 초과의 제2 STA들 중 대응하는 STA로 유니캐스팅함으로써 상기 제2 프레임을 송신하도록 상기 프로세서에 의해 실행 가능하고,
상기 매체는:
상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 대응하는 STA로부터 FTM(Fine Timing Measurement) 프레임을 수신하도록 상기 프로세서에 의해 실행 가능한 코드를 더 포함하고, 상기 FTM 프레임은:
상기 제1 STA에 의한 RTT(Round Trip Time) 계산들을 위한 제1 타이밍 정보 ― 상기 제1 타이밍 정보는, 상기 대응하는 STA에서의 상기 제2 프레임의 도착 시간, 또는 상기 FTM 프레임의 송신 시간 중 하나 또는 그 초과를 포함함 ― , 또는
상기 하나 또는 그 초과의 후속 프레임들이 각도 정보를 포함한다는 것을 상기 제1 NDPA 프레임이 추가로 표시할 때, 상기 제2 프레임의 AoA(Angle of Arrival), 또는 상기 제2 프레임의 AoD(Angle of Departure) 중 하나 또는 그 초과, 또는
상기 대응하는 STA에 대한 LCI(Location Context Identifier), 또는
상기 제1 STA와 상기 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 CFI(Channel Feedback Information) 필드 중 적어도 하나를 갖고,
상기 CFI 필드는, CFR(Channel Frequency Response) 정보, 또는 CIR(Channel Impulse Response) 정보, 또는 상기 제2 프레임의 도착 정보를 갖는 상기 CIR 정보의 서브세트, 또는 PDP(Power Delay Profile) 정보, 또는 제2 프레임에 대한 FAC(First Arrival Correction) 정보 중 하나를 포함하는,
비-일시적인 컴퓨터-판독 가능 저장 매체. - 제28 항에 있어서,
상기 코드는,
상기 제1 NDPA 프레임을 상기 하나 또는 그 초과의 제2 STA들로 브로드캐스팅함으로써 상기 제1 NDPA 프레임을 송신하고, 그리고
상기 제2 프레임을 상기 하나 또는 그 초과의 제2 STA들로 브로드캐스팅함으로써 상기 제2 프레임을 송신하도록 상기 프로세서에 의해 실행 가능하고,
상기 매체는:
상기 제1 STA에서, 상기 제2 프레임에 대한 응답으로, 상기 하나 또는 그 초과의 제2 STA들 내의 제1 대응하는 STA로부터 제1 CBF(Compressed Beamforming) 프레임을 수신하도록 상기 프로세서에 의해 실행 가능한 코드를 더 포함하고, 상기 제1 CBF 프레임은,
상기 제1 STA와 상기 하나 또는 그 초과의 제2 STA들 내의 상기 제1 대응하는 STA 사이의 통신 채널에 관한 정보를 갖는 제1 대응하는 CFI(Channel Feedback Information) 필드,
상기 제1 대응하는 STA에서의 상기 제2 프레임의 수신 시간, 및
상기 제1 STA로의 상기 제1 CBF 프레임의 송신 시간 중 하나 또는 그 초과를 포함하는,
비-일시적인 컴퓨터-판독 가능 저장 매체.
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662300879P | 2016-02-28 | 2016-02-28 | |
| US201662300884P | 2016-02-28 | 2016-02-28 | |
| US62/300,879 | 2016-02-28 | ||
| US62/300,884 | 2016-02-28 | ||
| US15/191,493 US11131743B2 (en) | 2016-02-28 | 2016-06-23 | Unicast and broadcast protocol for wireless local area network ranging and direction finding |
| US15/191,493 | 2016-06-23 | ||
| PCT/US2017/015134 WO2017146861A1 (en) | 2016-02-28 | 2017-01-26 | Unicast and broadcast protocol for wireless local area network ranging and direction finding |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180120164A true KR20180120164A (ko) | 2018-11-05 |
Family
ID=59685476
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187024522A KR20180120164A (ko) | 2016-02-28 | 2017-01-26 | 무선 로컬 영역 네트워크 레인징 및 방향 탐지를 위한 유니캐스트 및 브로드캐스트 프로토콜 |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP3420742B1 (ko) |
| JP (1) | JP2019507874A (ko) |
| KR (1) | KR20180120164A (ko) |
| CN (1) | CN108700641B (ko) |
| WO (3) | WO2017146863A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022045567A1 (ko) * | 2020-08-25 | 2022-03-03 | 삼성전자 주식회사 | 증강 현실을 위한 타겟 장치 인식 방법 및 장치 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10247808B2 (en) * | 2015-01-12 | 2019-04-02 | Qualcomm Incorporated | Location reporting for extremely high frequency (EHF) devices |
| CN111052819A (zh) * | 2017-09-06 | 2020-04-21 | 洛希克斯有限公司 | 在存在多个通信路径的情况下进行精确射频定位的粗略和精细飞行时间估计的系统和方法 |
| CN107765211B (zh) * | 2017-10-18 | 2021-05-28 | 国家新闻出版广电总局广播科学研究院 | 一种对不明广播电视侵入信号的侦测系统 |
| CN109714092B (zh) * | 2017-10-26 | 2021-09-07 | 华为技术有限公司 | 用于传输数据的方法和装置 |
| TWI645733B (zh) * | 2017-11-13 | 2018-12-21 | 財團法人工業技術研究院 | 基於通道資訊之定位裝置、系統及方法 |
| CN117062229A (zh) | 2017-11-24 | 2023-11-14 | 华为技术有限公司 | 一种信息指示方法和装置 |
| WO2019202873A1 (ja) * | 2018-04-19 | 2019-10-24 | 日本電気株式会社 | 端末、無線通信システム、及び通信方法 |
| EP3614778B1 (en) * | 2018-06-29 | 2023-08-16 | LG Electronics Inc. | Signal transmitting/receiving method in wireless lan system and device therefor |
| US10908274B2 (en) | 2019-01-11 | 2021-02-02 | Samsung Electronics Co... Ltd. | Framework and methods to acknowledge the ranging configuration for IEEE 802.15.4Z |
| US11617148B2 (en) | 2019-05-03 | 2023-03-28 | Samsung Electronics Co., Ltd. | Enhancement of flexibility to change STS index/counter for IEEE 802.15.4z |
| CN112748425A (zh) * | 2019-10-31 | 2021-05-04 | 华为技术有限公司 | 感知方法及装置 |
| WO2021198729A1 (en) * | 2020-03-31 | 2021-10-07 | Telefonaktiebolaget Lm Ericsson (Publ) | Drone state estimation by single base station |
| CN114760640B (zh) * | 2021-01-08 | 2023-09-08 | 华为技术有限公司 | 无线局域网感知方法及装置 |
| EP4346271A1 (en) * | 2021-06-28 | 2024-04-03 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Wireless communication method and device |
| CN117616716A (zh) * | 2021-07-16 | 2024-02-27 | 高通股份有限公司 | 用于射频(rf)侦听的信道状态信息(csi)报告 |
| WO2023240422A1 (zh) * | 2022-06-13 | 2023-12-21 | Oppo广东移动通信有限公司 | 感知测量方法、装置、设备及存储介质 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012093794A2 (en) * | 2011-01-03 | 2012-07-12 | Lg Electronics Inc. | Channel sounding method in wireless local area network system and apparatus for supporting the same |
| US9332449B2 (en) * | 2011-11-24 | 2016-05-03 | Lg Electronics Inc. | Method and apparatus for feedback of channel state information |
| US9497057B2 (en) * | 2011-12-06 | 2016-11-15 | Lg Electronics Inc. | Method for performing channel sounding in wireless LAN system and apparatus |
| US9351297B2 (en) * | 2012-08-27 | 2016-05-24 | Huawei Technologies Co., Ltd. | System and method for a collaborative service set |
| WO2014130070A1 (en) * | 2013-02-19 | 2014-08-28 | Intel Corporation | Improved wireless network location techniques |
| US9456306B2 (en) * | 2013-09-30 | 2016-09-27 | Broadcom Corporation | Fine timing measurement transmissions between APs |
| US9839047B2 (en) * | 2013-12-04 | 2017-12-05 | Electronics And Telecommunications Research Institute | Methods for channel sounding and scheduling for interference alignment in wireless local area network |
| WO2015130618A2 (en) * | 2014-02-25 | 2015-09-03 | Mediatek Inc. | Direction finding positioning in wireless local area networks |
-
2017
- 2017-01-26 WO PCT/US2017/015160 patent/WO2017146863A1/en active Application Filing
- 2017-01-26 WO PCT/US2017/015155 patent/WO2017146862A1/en active Application Filing
- 2017-01-26 EP EP17704613.3A patent/EP3420742B1/en active Active
- 2017-01-26 JP JP2018544845A patent/JP2019507874A/ja active Pending
- 2017-01-26 CN CN201780012661.8A patent/CN108700641B/zh active Active
- 2017-01-26 KR KR1020187024522A patent/KR20180120164A/ko unknown
- 2017-01-26 WO PCT/US2017/015134 patent/WO2017146861A1/en active Application Filing
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022045567A1 (ko) * | 2020-08-25 | 2022-03-03 | 삼성전자 주식회사 | 증강 현실을 위한 타겟 장치 인식 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3420742A1 (en) | 2019-01-02 |
| WO2017146863A1 (en) | 2017-08-31 |
| CN108700641B (zh) | 2022-12-02 |
| WO2017146862A1 (en) | 2017-08-31 |
| JP2019507874A (ja) | 2019-03-22 |
| EP3420742B1 (en) | 2019-12-04 |
| WO2017146861A1 (en) | 2017-08-31 |
| CN108700641A (zh) | 2018-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10379196B2 (en) | Unicast and broadcast protocol for wireless local area network ranging and direction finding | |
| CN108700641B (zh) | 用于无线局域网测距和测向的单播和广播协议 | |
| US10104635B2 (en) | Unicast and broadcast protocol for wireless local area network ranging and direction finding | |
| US11129126B2 (en) | Communication nodes and methods therein for positioning in a wireless communications network | |
| EP3256874B1 (en) | Ftm protocol with angle of arrival and angle of departure | |
| US20180310133A1 (en) | Wireless network positioning | |
| US9730179B2 (en) | Passive locationing over multiple channels | |
| JP2022544111A (ja) | 測位基準信号処理のための計算複雑さフレームワーク | |
| US20190306825A1 (en) | Access point (ap) to access point (ap) ranging for passive locationing | |
| TW202122819A (zh) | 接收或傳送波束鎖資訊之報告 | |
| WO2014056172A1 (zh) | 定位方法和装置 | |
| US20180310127A1 (en) | System and Method for Collaborative Position Determination | |
| WO2018059128A1 (zh) | 一种波束扫描和切换的方法及装置 | |
| TW202241185A (zh) | 對用於無線定位的基於精度的發送/接收點選擇的幾何衰減 | |
| TW202239224A (zh) | 可重配智慧表面輔助定位的操作調整 | |
| US20240061069A1 (en) | Mapping of reference signal measurements to angles of departure | |
| US20230379861A1 (en) | Multi-port positioning reference signal (prs) for downlink angle-of-departure (aod) estimation | |
| US20230273284A1 (en) | Multi-port positioning reference signal (prs) for downlink angle-of-departure (aod) estimation | |
| KR20230084498A (ko) | 채널 상태 정보 요청 필드에 기초한 포지셔닝 관련 액션의 트리거 | |
| KR20230156041A (ko) | 포지셔닝 자원에 대한 기준 신호의 다수의 서브대역들에 대한 측정 표시들을 갖는 측정 보고 | |
| WO2023033836A1 (en) | Apparatus and method of performing an anti-multipath function to calibrate an antenna array | |
| WO2023033835A1 (en) | Apparatus and method of beam parameter estimation for line-of-sight determination | |
| TW202249514A (zh) | 用於基於出發角(aod)的定位的探測參考訊號(srs)的可重配置智慧表面(ris)波束掃瞄 | |
| WO2023027695A1 (en) | Apparatus and method of determining transfer functions for position estimation | |
| JP2024503038A (ja) | 増大した発射角測定粒度 |