KR20180098999A - 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템 - Google Patents
무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템 Download PDFInfo
- Publication number
- KR20180098999A KR20180098999A KR1020170025901A KR20170025901A KR20180098999A KR 20180098999 A KR20180098999 A KR 20180098999A KR 1020170025901 A KR1020170025901 A KR 1020170025901A KR 20170025901 A KR20170025901 A KR 20170025901A KR 20180098999 A KR20180098999 A KR 20180098999A
- Authority
- KR
- South Korea
- Prior art keywords
- bogie
- communication
- speed
- rail
- bogies
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/08—Control, warning or like safety means along the route or between vehicles or trains for controlling traffic in one direction only
- B61L23/14—Control, warning or like safety means along the route or between vehicles or trains for controlling traffic in one direction only automatically operated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/34—Control, warning or like safety means along the route or between vehicles or trains for indicating the distance between vehicles or trains by the transmission of signals therebetween
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0018—Communication with or on the vehicle or train
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0018—Communication with or on the vehicle or train
- B61L15/0036—Conductor-based, e.g. using CAN-Bus, train-line or optical fibres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0072—On-board train data handling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or trains
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or trains
- B61L25/025—Absolute localisation, e.g. providing geodetic coordinates
-
- B61L27/0005—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/04—Automatic systems, e.g. controlled by train; Change-over to manual control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/70—Details of trackside communication
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L2201/00—Control methods
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L2205/00—Communication or navigation systems for railway traffic
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
이를 위해, 본 발명에 따른 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템은, 무인대차의 주행을 위한 레일을 따라서는 각 대차간의 통신을 수행하기 위한 통신선이 포설되고, 각 대차에는 해당 대차의 현재 위치를 취득하기 위한 절대위치 센서와, 상기 통신선을 매개로 각 대차 상호 간에 데이터의 송.수신이 이루어지는 통신부 및, 상기 통신부를 통해 수신된 데이터를 기초로 상대 대차의 속도, 위치, 방향 정보를 얻은 후 해당 대차의 위치 및 속도 제어를 위한 연산을 수행하는 컨트롤러가 포함되어 구성된다.
Description
도 2는 본 발명에 따른 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템의 개략적인 구성을 나타내는 도면,
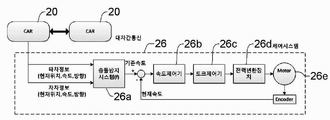
도 3은 본 발명에 따른 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템을 통한 대차의 충돌방지 운전제어 과정을 나타내는 제어블록도이다.
22: 절대위치 센서, 24: 통신부,
26: 컨트롤러, 30: 상위 컨트롤러,
40: 통신선.
Claims (4)
- 무인대차의 주행을 위한 레일을 따라서는 각 대차간의 통신을 수행하기 위한 통신선이 포설되고;
각 대차에는 해당 대차의 현재 위치를 취득하기 위한 절대위치 센서와, 상기 통신선을 매개로 각 대차 상호 간에 데이터의 송.수신이 이루어지는 통신부 및, 상기 통신부를 통해 수신된 데이터를 기초로 상대 대차의 속도, 위치, 방향 정보를 얻은 후 해당 대차의 위치 및 속도 제어를 위한 연산을 수행하는 컨트롤러가 포함되어 구성된 것;을 특징으로 하는 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템. - 제 1항에 있어서,
상기 통신선에는 다수 대의 대차에 대한 정보를 통합하여 모니터링 하고, 임의의 대차에 선택적으로 필요 정보를 제공하는 상위 컨트롤러가 연계되어 구성된 것을 특징으로 하는 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템. - 제 1항에 있어서,
상기 각 대차에 구비된 컨트롤러는 현재위치와 속도 및 방향 정보를 포함하는 자차정보 및 타차정보를 기초로 현재속도에 대한 감속거리를 연산한 후, 설정된 범위에 도달 시 최적의 기준속도를 생성하고, 현재속도가 기준속도에 도달하도록 모터의 구동제어를 행하도록 이루어진 것을 특징으로 하는 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템. - 제 1항에 있어서,
상기 다수 대의 대차가 주행하는 레일은 루프형 레일, 분기된 형태의 레일, 직선형 레일을 비롯한 다양한 형태의 레일이 적용 가능한 것을 특징으로 하는 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170025901A KR20180098999A (ko) | 2017-02-28 | 2017-02-28 | 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170025901A KR20180098999A (ko) | 2017-02-28 | 2017-02-28 | 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180098999A true KR20180098999A (ko) | 2018-09-05 |
Family
ID=63594378
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170025901A Ceased KR20180098999A (ko) | 2017-02-28 | 2017-02-28 | 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20180098999A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210089436A (ko) * | 2020-01-08 | 2021-07-16 | 현대무벡스 주식회사 | 이송 대차의 주행 시스템 |
-
2017
- 2017-02-28 KR KR1020170025901A patent/KR20180098999A/ko not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210089436A (ko) * | 2020-01-08 | 2021-07-16 | 현대무벡스 주식회사 | 이송 대차의 주행 시스템 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102890510B (zh) | 基于rfid的港口无人运输车辆智能导航云系统 | |
| JP6296676B2 (ja) | 列車制御システム | |
| KR101625524B1 (ko) | 대차 시스템 및 대차의 제어방법 | |
| KR101905936B1 (ko) | 열차 제어 시스템의 지상 장치 | |
| KR101930584B1 (ko) | 열차 제어 장치 | |
| KR101812088B1 (ko) | 스마트 팩토리 구현을 위한 원격제어방식의 무인반송시스템 | |
| CN105416259A (zh) | 基于视频识别无人驾驶电机车行车控制系统 | |
| KR20130120530A (ko) | 유궤도 대차 시스템 | |
| CN104828450A (zh) | 智能搬运车及智能搬运车用交叉口防撞系统 | |
| JP2019046013A (ja) | 自動運転車両の走行管制方法及び走行管制装置 | |
| KR20140081851A (ko) | 열차 제어 시스템 | |
| CN109195856B (zh) | 识别轨道车辆前方的危险空间中的障碍物的方法和系统 | |
| KR20190036288A (ko) | 패싱 백 방식을 이용한 자율주행 열차의 운행 제어 장치 및 방법 | |
| KR101308868B1 (ko) | 무인 자율 이동체 및 무인 자율 이동체의 적외선 통신 방법 | |
| KR20180088961A (ko) | 무인 자동물류 반송차 | |
| KR20140018693A (ko) | 하이브리드 궤도회로 열차제어시스템 | |
| CN204642872U (zh) | 智能搬运车及智能搬运车用交叉口防撞系统 | |
| KR20180098999A (ko) | 무인대차 시스템의 다수대 대차간 통신에 의한 충돌방지 제어 시스템 | |
| JP2849728B2 (ja) | 無人搬送車の複数台制御方法 | |
| JP3607966B2 (ja) | 走行支援システム | |
| KR19980083717A (ko) | 자동 열차제어 장치 및 방법 | |
| JPH07101336A (ja) | 坑道用動力車の自動走行制御装置 | |
| JP4974934B2 (ja) | 無人搬送車の制御方法 | |
| KR102850854B1 (ko) | 무궤도 미니트램의 제동 제어장치 | |
| JP3452703B2 (ja) | 列車走行制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20170228 |
|
| PA0201 | Request for examination | ||
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
Patent event date: 20170906 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
Patent event date: 20180710 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20181120 Patent event code: PE09021S01D |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20190521 Patent event code: PE09021S02D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20191219 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20190521 Comment text: Final Notice of Reason for Refusal Patent event code: PE06011S02I Patent event date: 20181120 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |