KR20180098414A - 도구의 제어 움직임에 사용되는 프레임의 위치 및 방향을 추정하는 장치 및 방법 - Google Patents
도구의 제어 움직임에 사용되는 프레임의 위치 및 방향을 추정하는 장치 및 방법 Download PDFInfo
- Publication number
- KR20180098414A KR20180098414A KR1020187023683A KR20187023683A KR20180098414A KR 20180098414 A KR20180098414 A KR 20180098414A KR 1020187023683 A KR1020187023683 A KR 1020187023683A KR 20187023683 A KR20187023683 A KR 20187023683A KR 20180098414 A KR20180098414 A KR 20180098414A
- Authority
- KR
- South Korea
- Prior art keywords
- frame
- tool
- image
- determining
- transform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 0 *CC1(CC2)[C@]2CC(*)C1 Chemical compound *CC1(CC2)[C@]2CC(*)C1 0.000 description 2
- LYIZIBGCPOGXLT-UHFFFAOYSA-N C=C=C(CCC1)C1=C=C Chemical compound C=C=C(CCC1)C1=C=C LYIZIBGCPOGXLT-UHFFFAOYSA-N 0.000 description 1
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/04—Viewing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
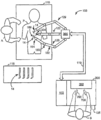
도 2는 내시경의 관찰 단부에 대한 엔드 이펙터의 위치와 오퍼레이터의 눈에 대한 마스터 컨트롤 장치의 대응하는 위치를 나타내는 개략적인 3차원 도면을 나타내고 있다.
도 3은 이미지 포착 시스템의 이미지 프레임에 대한 엔드 이펙터의 위치 및 방향을 나타내는 개략적인 3차원 도면을 나타내고 있다.
도 4는 의료용 로봇 시스템의 오퍼레이터의 눈과 관련된 눈 기준 시스템에 대한 마스터 컨트롤 장치의 집게 형성부의 위치 및 방향을 나타내는 개략적인 3차원 도면을 나타내고 있다.
도 5는 이미지 포착 시스템과 결합된 이미지 프레임에 대한 도구의 엔드 이펙터의 위치 및 방향을 결정하기 위해서 컨트롤 시스템에 의해 사용된 프레임의 위치를 나타내는 수술 스테이션의 일부분의 개략적인 측면도를 나타내고 있다.
도 6은 외과의사의 눈과 관련된 눈 프레임에 대한 마스터 컨트롤 장치 집게 형성부의 위치 및 방향을 결정하기 위해서 컨트롤 시스템에 의해 사용된 프레임의 위치를 나타내는 외과의사의 워크스테이션(200)의 일부분의 개략적인 측면도를 나타내고 있다.
도 7 내지 도 9는 외과의사의 손, 마스터 컨트롤 장치, 그리고 도구의 엔드 이펙터에 대한 대응하는 매핑 위치와 이들의 선택을 위한 방법을 개략적으로 나타내고 있다.
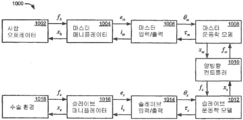
도 10은 마스터/슬레이브 로봇 시스템의 고 레벨 컨트롤 아키텍쳐 모델(high level control architecture model)의 블록도를 나타내고 있다.
도 11은 공통 입구 포트에 배치된 공통 피벗점을 중심으로 도구와 내시경이 피벗운동하도록 만곡된 캐뉼라를 통하여 내시경과 함께 삽입된 왼쪽 도구와 오른쪽 도구의 개략적인 측면도를 나타내고 있다.
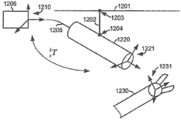
도 12는 도구를 관찰하기 위해 작업 부위에 묶여 있는 내시경의 개략적인 측면도를 나타내고 있다.
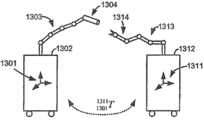
도 13은 로봇으로 제어되는 도구 및 이미지 포착 시스템을 각각 작업 부위에 위치시키는 이동가능한 구조의 개략적인 측면도를 나타내고 있다.
도 14는 이미지 프레임의 포인트를 고정 프레임으로 변환시키기 위해 사용된 이미지 프레임 변환 및 도구 프레임의 포인트를 고정 프레임으로 변환시키기 위해 사용된 도구 프레임 변환의 개략도를 나타내고 있다.
도 15는 마스터 컨트롤 장치의 움직임에 대응하여 도구의 움직임을 명령하기 위한 알려지지 않은 프레임 변환을 추정하는 방법의 흐름도를 나타내고 있다.

Claims (22)
- 컨트롤 장치 프레임을 가진 컨트롤 장치와, 이미지 프레임을 가진 이미지 포착 시스템을 포함하는 시스템을 작동시키는 방법으로서,
일련의 프레임에 대해 복수의 프레임 변환을 지정하는 단계를 포함하고, 상기 일련의 프레임은 상기 이미지 프레임으로부터 도구 프레임까지이고, 상기 도구 프레임은 상기 이미지 포착 시스템의 시야 내에 배치된 도구의 프레임이고, 상기 일련의 프레임은 상기 이미지 프레임, 상기 도구 프레임, 그리고 상기 이미지 프레임과 상기 도구 프레임 사이의 하나 이상의 추가 프레임을 포함하고, 상기 복수의 프레임 변환의 각각의 프레임 변환은 상기 일련의 프레임 중의 한 쌍의 인접한 프레임에 대응하고, 상기 복수의 프레임 변환은 알려지지 않은 프레임 변환을 포함하고;
상기 방법이 또한,
상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임에 관한 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계;
상기 이미지-도구 프레임 관계와 상기 복수의 프레임 변환 중의 하나 이상의 알려진 프레임 변환을 이용하여 상기 알려지지 않은 프레임 변환에 대한 추정된 프레임 변환을 결정하는 단계;
상기 추정된 프레임 변환과 상기 하나 이상의 알려진 프레임 변환을 이용하여 상기 컨트롤 장치에서의 입력 움직임에 대응하여 상기 도구에 대한 출력 움직임을 결정하는 단계; 그리고
상기 출력 움직임에 따라 상기 도구의 움직임을 일으키는 단계;
를 포함하는 것을 특징으로 하는 방법. - 제1항에 있어서,
상기 컨트롤 장치에서의 입력 움직임에 대응하여 상기 도구에 대한 출력 움직임을 결정하는 단계가
상기 추정된 프레임 변환과 상기 하나 이상의 알려진 프레임 변환을 이용하여 마스터-도구 변환을 결정하는 단계와,
상기 입력 움직임에 대응하여 상기 출력 움직임을 결정하기 위해서 상기 마스터-도구 변환을 이용하는 단계를 포함하고;
상기 시스템이 오퍼레이터가 볼 수 있는 디스플레이, 상기 오퍼레이터에 대해 한정되어 있는 눈 프레임, 그리고 상기 이미지 포착 시스템에 의해 포착된 이미지의 정보를 상기 디스플레이에 나타내도록 구성된 영상 시스템을 더 포함하고 있고; 그리고
상기 마스터-도구 변환을 결정하는 단계가, 상기 컨트롤 장치 프레임의 지점들을 상기 눈 프레임의 대응하는 지점들로 변환시키는 마스트-눈 변환을 상기 도구 프레임의 지점들을 상기 이미지 프레임의 대응하는 지점들로 변환시키는 도구-이미지 변환과 정렬시키는 단계를 포함하는 것을 특징으로 하는 방법. - 제1항에 있어서, 상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계가
상기 하나 이상의 이미지로부터 상기 도구의 자세 표시 지점을 확인하는 단계; 그리고
상기 자세 표시 지점을 이용하여 상기 이미지-도구 프레임 관계를 결정하는 단계;
를 포함하는 것을 특징으로 하는 방법. - 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 알려지지 않은 프레임 변환의 적어도 하나의 파라미터가 알려져 있는 것을 특징으로 하는 방법.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계가
하나의 순시치로부터 도출된 지점 쌍들을 결정하는 단계를 포함하는 것을 특징으로 하는 방법. - 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계가
다수의 순시치로부터 도출된 지점 쌍들을 결정하는 단계를 포함하는 것을 특징으로 하는 방법. - 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 알려지지 않은 프레임 변환에 대한 추정된 프레임 변환을 결정하는 단계가
상기 알려지지 않은 프레임 변화의 6개의 독립 파라미터보다 적은 수의 독립 파라미터를 결정하는 단계를 포함하는 것을 특징으로 하는 방법. - 컨트롤 장치 프레임을 가진 컨트롤 장치;
이미지 프레임을 가진 이미지 포착 시스템; 그리고
일련의 프레임에 대해 복수의 프레임 변환을 지정하는 단계를 포함하고, 상기 일련의 프레임은 상기 이미지 프레임으로부터 도구 프레임까지이고, 상기 도구 프레임은 상기 이미지 포착 시스템의 시야 내에 배치된 도구의 프레임이고, 상기 일련의 프레임은 상기 이미지 프레임, 상기 도구 프레임, 그리고 상기 이미지 프레임과 상기 도구 프레임 사이의 하나 이상의 추가 프레임을 포함하고, 상기 복수의 프레임 변환의 각각의 프레임 변환은 상기 일련의 프레임 중의 한 쌍의 인접한 프레임에 대응하고, 상기 복수의 프레임 변환은 알려지지 않은 프레임 변환을 포함하고;
또한,
상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임에 관한 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계;
상기 이미지-도구 프레임 관계와 상기 복수의 프레임 변환 중의 하나 이상의 알려진 프레임 변환을 이용하여 상기 알려지지 않은 프레임 변환에 대한 추정된 프레임 변환을 결정하는 단계;
상기 추정된 프레임 변환과 상기 하나 이상의 알려진 프레임 변환을 이용하여 상기 컨트롤 장치에서의 입력 움직임에 대응하여 상기 도구에 대한 출력 움직임을 결정하는 단계; 그리고
상기 출력 움직임에 따라 상기 도구의 움직임을 일으키는 단계;
를 포함하는 방법을 실행시키도록 구성된 적어도 하나의 프로세서;
를 포함하는 것을 특징으로 하는 시스템. - 제8항에 있어서,
상기 컨트롤 장치에서의 입력 움직임에 대응하여 상기 도구에 대한 출력 움직임을 결정하는 단계가
상기 추정된 프레임 변환과 상기 하나 이상의 알려진 프레임 변환을 이용하여 마스터-도구 변환을 결정하는 단계; 그리고
상기 입력 움직임에 대응하여 상기 출력 움직임을 결정하기 위해서 상기 마스터-도구 변환을 이용하는 단계;
를 포함하는 것을 특징으로 하는 시스템. - 제9항에 있어서,
오퍼레이터가 볼 수 있는 디스플레이;
상기 오퍼레이터에 대해 한정되어 있는 눈 프레임; 그리고
상기 이미지 포착 시스템에 의해 포착된 이미지의 정보를 상기 디스플레이에 나타내도록 구성된 영상 시스템;
을 더 포함하고 있고,
상기 마스터-도구 변환을 결정하는 단계가, 상기 컨트롤 장치 프레임의 지점들을 상기 눈 프레임의 대응하는 지점들로 변환시키는 마스트-눈 변환을 상기 도구 프레임의 지점들을 상기 이미지 프레임의 대응하는 지점들로 변환시키는 도구-이미지 변환과 정렬시키는 단계를 포함하는 것을 특징으로 하는 시스템. - 제8항에 있어서, 상기 방법이
제2 일련의 프레임에 대해 제2 복수의 프레임 변환을 지정하는 단계를 더 포함하고, 상기 제2 일련의 프레임은 상기 이미지 프레임으로부터 제2 도구 프레임까지이고, 상기 제2 도구 프레임은 상기 이미지 포착 시스템의 시야 내에 배치된 제2 도구의 프레임이고;
상기 방법이 또한
상기 제2 복수의 프레임 변환 중의 알려지지 않은 프레임 변환에 대한 제2 추정된 프레임 변환을 결정하는 단계; 그리고
상기 추정된 프레임 변환과 상기 하나 이상의 알려진 프레임 변환을 이용하여 결정된 제2 출력 움직임에 따라 상기 도구를 이동시키는 단계;
를 더 포함하는 것을 특징으로 하는 시스템. - 제8항에 있어서, 하나 이상의 알려진 프레임이 복수의 알려진 프레임을 포함하는 것을 특징으로 하는 시스템.
- 제8항에 있어서, 상기 복수의 프레임 변환이 제2 알려지지 않은 프레임 변환을 포함하고, 상기 방법이
상기 이미지-도구 프레임 관계와 상기 하나 이상의 알려진 프레임 변환을 이용하여 제2 알려지지 않은 프레임 변환에 대한 제2 추정된 프레임 변환을 결정하는 단계를 더 포함하는 것을 특징으로 하는 시스템. - 제13항에 있어서, 제2 알려지지 않은 프레임 변환에 대한 제2 추정된 프레임 변환을 결정하는 단계가 비용 함수를 최적화하는 단계를 포함하는 것을 특징으로 하는 시스템.
- 제8항 내지 제13항 중 어느 한 항에 있어서, 상기 알려지지 않은 프레임 변환의 적어도 하나의 파라미터가 알려져 있는 것을 특징으로 하는 시스템.
- 제8항 내지 제13항 중 어느 한 항에 있어서, 상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계가
상기 하나 이상의 이미지로부터 상기 도구의 자세 표시 지점을 확인하는 단계; 그리고
상기 자세 표시 지점을 이용하여 상기 이미지-도구 프레임 관계를 결정하는 단계;
를 포함하는 것을 특징으로 하는 시스템. - 제8항 내지 제13항 중 어느 한 항에 있어서, 상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계가
하나의 순시치로부터 도출된 지점 쌍들을 결정하는 단계를 포함하는 것을 특징으로 하는 시스템. - 제8항 내지 제13항 중 어느 한 항에 있어서, 상기 이미지 포착 시스템에 의해 포착된 하나 이상의 이미지에 대한 정보로부터 상기 이미지 프레임과 상기 도구 프레임 사이의 이미지-도구 프레임 관계를 결정하는 단계가
다수의 순시치로부터 도출된 지점 쌍들을 결정하는 단계를 포함하는 것을 특징으로 하는 시스템. - 제8항 내지 제13항 중 어느 한 항에 있어서, 상기 일련의 프레임이
상기 이미지 프레임으로부터 고정 프레임까지의 제1 일련의 프레임; 및
상기 고정 프레임으로부터 상기 도구 프레임까지의 제2 일련의 프레임;
을 포함하는 것을 특징으로 하는 시스템. - 제8항 내지 제13항 중 어느 한 항에 있어서, 상기 이미지 포착 시스템이 기계 요소에 구속되어 있는 것을 특징으로 하는 시스템.
- 제8항 내지 제13항 중 어느 한 항에 있어서,
상기 이미지 포착 시스템과 상기 도구 중의 하나에 결합되도록 구성된 제1 로봇 암을 가지고 있으며 제1 구조 프레임을 가지고 있는 제1 구조; 및
상기 이미지 포착 시스템과 상기 도구 중의 다른 하나에 결합되도록 구성된 제2 로봇 암을 가지고 있으며 제2 구조 프레임을 가지고 있는 제2 구조;
를 더 포함하고 있고,
상기 제1 구조와 상기 제2 구조 중의 적어도 하나가 이동가능한 구조이고, 상기 제1 구조 프레임이 고정 프레임이고, 상기 알려지지 않은 프레임 변환이 상기 제2 구조 프레임의 지점들을 상기 고정 프레임의 대응하는 지점들로 변환시키는 것을 특징으로 하는 시스템. - 제8항 내지 제13항 중 어느 한 항에 있어서, 상기 알려지지 않은 프레임 변환에 대한 추정된 프레임 변환을 결정하는 단계가
상기 알려지지 않은 프레임 변화의 6개의 독립 파라미터보다 적은 수의 독립 파라미터를 결정하는 단계를 포함하는 것을 특징으로 하는 시스템.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161485706P | 2011-05-13 | 2011-05-13 | |
| US61/485,706 | 2011-05-13 | ||
| US13/360,380 | 2012-01-27 | ||
| US13/360,380 US9259289B2 (en) | 2011-05-13 | 2012-01-27 | Estimation of a position and orientation of a frame used in controlling movement of a tool |
| PCT/US2012/037310 WO2012158458A2 (en) | 2011-05-13 | 2012-05-10 | Estimation of a position and orientation of a frame used in controlling movement of a tool |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137031922A Division KR101891162B1 (ko) | 2011-05-13 | 2012-05-10 | 도구의 제어 움직임에 사용되는 프레임의 위치 및 방향을 추정하는 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180098414A true KR20180098414A (ko) | 2018-09-03 |
| KR101957302B1 KR101957302B1 (ko) | 2019-03-12 |
Family
ID=47142423
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187023683A Active KR101957302B1 (ko) | 2011-05-13 | 2012-05-10 | 도구의 제어 움직임에 사용되는 프레임의 위치 및 방향을 추정하는 장치 및 방법 |
| KR1020137031922A Active KR101891162B1 (ko) | 2011-05-13 | 2012-05-10 | 도구의 제어 움직임에 사용되는 프레임의 위치 및 방향을 추정하는 장치 및 방법 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137031922A Active KR101891162B1 (ko) | 2011-05-13 | 2012-05-10 | 도구의 제어 움직임에 사용되는 프레임의 위치 및 방향을 추정하는 장치 및 방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (6) | US9259289B2 (ko) |
| EP (2) | EP2706947B1 (ko) |
| JP (1) | JP6026515B2 (ko) |
| KR (2) | KR101957302B1 (ko) |
| CN (1) | CN103533909B (ko) |
| WO (1) | WO2012158458A2 (ko) |
Families Citing this family (81)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2816089A1 (en) | 2010-10-29 | 2012-05-03 | Richard H. Feins | Modular staged reality simulator |
| US9805625B2 (en) | 2010-10-29 | 2017-10-31 | KindHeart, Inc. | Surgical simulation assembly |
| US9259289B2 (en) | 2011-05-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Estimation of a position and orientation of a frame used in controlling movement of a tool |
| JP5941762B2 (ja) * | 2012-06-14 | 2016-06-29 | オリンパス株式会社 | マニピュレータシステム |
| CN110279427B (zh) * | 2012-12-10 | 2024-01-16 | 直观外科手术操作公司 | 图像采集装置和可操纵装置活动臂受控运动过程中的碰撞避免 |
| DE102012025100A1 (de) * | 2012-12-20 | 2014-06-26 | avateramedical GmBH | Entkoppeltes Mehrkamerasystem für die minimal-invasive Chirurgie |
| US11747895B2 (en) * | 2013-03-15 | 2023-09-05 | Intuitive Surgical Operations, Inc. | Robotic system providing user selectable actions associated with gaze tracking |
| KR102283176B1 (ko) | 2013-03-15 | 2021-07-29 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 로봇 수술 시스템에서의 수술 중 도구의 교환 |
| KR102115447B1 (ko) * | 2013-03-27 | 2020-05-27 | 한양대학교 에리카산학협력단 | 내시경 장치 |
| KR20140121581A (ko) * | 2013-04-08 | 2014-10-16 | 삼성전자주식회사 | 수술 로봇 시스템 |
| US9424378B2 (en) * | 2014-02-03 | 2016-08-23 | Siemens Product Lifecycle Management Software Inc. | Simulation using coupling constraints |
| US10285764B2 (en) * | 2014-02-20 | 2019-05-14 | Intuitive Surgical Operations, Inc. | Limited movement of a surgical mounting platform controlled by manual motion of robotic arms |
| EP3119323B1 (en) * | 2014-03-17 | 2019-08-28 | Intuitive Surgical Operations, Inc. | System and machine readable medium executing a method for recentering imaging devices and input controls |
| WO2015142955A1 (en) * | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Automated structure with pre-established arm positions in a teleoperated medical system |
| KR102356213B1 (ko) | 2014-03-17 | 2022-01-28 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격조정 의료 장치를 위한 안내 설정 |
| EP3868326B1 (en) | 2014-03-17 | 2025-12-31 | Intuitive Surgical Operations, Inc. | TOOL POSITIONING SYSTEM |
| DE102014007909A1 (de) | 2014-05-27 | 2015-12-03 | Carl Zeiss Meditec Ag | Chirurgisches Mikroskop |
| EP3169491A2 (en) * | 2014-07-15 | 2017-05-24 | Koninklijke Philips N.V. | Reconfigurable robot architecture for minimally invasive procedures |
| USD779678S1 (en) | 2014-07-24 | 2017-02-21 | KindHeart, Inc. | Surgical tray |
| JP6682512B2 (ja) | 2014-10-27 | 2020-04-15 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 一体化された手術台のシステム及び方法 |
| EP3212150B1 (en) | 2014-10-27 | 2021-08-11 | Intuitive Surgical Operations, Inc. | System for registering to a surgical table |
| CN110584789B (zh) * | 2014-10-27 | 2022-09-20 | 直观外科手术操作公司 | 用于器械干扰补偿的系统和方法 |
| JP6676061B2 (ja) | 2014-10-27 | 2020-04-08 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 統合された手術台運動のためのシステム及び方法 |
| WO2016069660A1 (en) | 2014-10-27 | 2016-05-06 | Intuitive Surgical Operations, Inc. | System and method for monitoring control points during reactive motion |
| CN112274250B (zh) | 2015-03-17 | 2024-12-31 | 直观外科手术操作公司 | 用于在远程操作医疗系统中呈现器械的屏幕识别的系统和方法 |
| US20160314716A1 (en) | 2015-04-27 | 2016-10-27 | KindHeart, Inc. | Telerobotic surgery system for remote surgeon training using remote surgery station and party conferencing and associated methods |
| JP2016221166A (ja) * | 2015-06-03 | 2016-12-28 | 株式会社デンソー | 医療行為支援システム |
| CN113397709B (zh) * | 2015-06-10 | 2024-09-20 | 直观外科手术操作公司 | 当错开时的主从取向映射 |
| CN105127997B (zh) * | 2015-08-10 | 2017-04-05 | 深圳百思拓威机器人技术有限公司 | 药剂师智能机器人系统及其控制方法 |
| JP6407826B2 (ja) * | 2015-09-03 | 2018-10-17 | ファナック株式会社 | 座標系設定方法、座標系設定装置、及び座標系設定装置を備えたロボットシステム |
| WO2017048922A1 (en) | 2015-09-16 | 2017-03-23 | KindHeart, Inc. | Surgical simulation system and associated methods |
| USD773686S1 (en) | 2015-09-16 | 2016-12-06 | KindHeart, Inc. | Surgical tray |
| TWI576649B (zh) * | 2015-12-09 | 2017-04-01 | 榮光 譚 | 手術用影像擷取裝置及其影像擷取方法 |
| CN105411681B (zh) * | 2015-12-22 | 2018-07-03 | 哈尔滨工业大学 | 分体式微创手术机器人的手眼协调控制系统及方法 |
| CN105395254B (zh) * | 2015-12-22 | 2018-03-30 | 哈尔滨工业大学 | 一种分体式微创手术机器人的控制系统 |
| CN108472090B (zh) * | 2015-12-29 | 2021-06-18 | 皇家飞利浦有限公司 | 用于控制外科手术机器人的系统、控制单元和方法 |
| WO2017189317A1 (en) | 2016-04-26 | 2017-11-02 | KindHeart, Inc. | Telerobotic surgery system for remote surgeon training using robotic surgery station and remote surgeon station and an animating device |
| JP6520831B2 (ja) * | 2016-06-07 | 2019-05-29 | オムロン株式会社 | 表示制御装置、表示制御システム、表示制御方法、表示制御プログラム、記録媒体 |
| CN109069215B (zh) * | 2016-07-14 | 2022-07-15 | 直观外科手术操作公司 | 用于控制外科器械的系统和方法 |
| KR102604919B1 (ko) | 2016-07-14 | 2023-11-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 컴퓨터 보조 원격조작 시스템에서의 2차 기구 제어 |
| DE102016217792A1 (de) * | 2016-09-16 | 2018-03-22 | Xion Gmbh | Justiersystem |
| WO2018052795A1 (en) * | 2016-09-19 | 2018-03-22 | Intuitive Surgical Operations, Inc. | Base positioning system for a controllable arm and related methods |
| EP3541219B1 (en) | 2016-11-16 | 2024-01-24 | Wink Robotics | Eyelid covering and stabilization for automatic eyelash extension |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| CN108261167B (zh) * | 2017-01-03 | 2019-12-03 | 上银科技股份有限公司 | 内视镜操控系统 |
| US10813710B2 (en) | 2017-03-02 | 2020-10-27 | KindHeart, Inc. | Telerobotic surgery system using minimally invasive surgical tool with variable force scaling and feedback and relayed communications between remote surgeon and surgery station |
| JP6445604B2 (ja) * | 2017-03-07 | 2018-12-26 | 上銀科技股▲フン▼有限公司 | ロボットアーム |
| JP2020512116A (ja) | 2017-03-31 | 2020-04-23 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | マーカーレスロボット追跡システム、制御装置、及び方法 |
| CN106945072B (zh) * | 2017-04-21 | 2023-07-04 | 哈尔滨思哲睿智能医疗设备股份有限公司 | 一种医用机器人主从响应测试系统 |
| CN111093891B (zh) | 2017-04-27 | 2022-08-02 | 磁转换技术全球私人有限公司 | 具有至少一个传感器布置和消磁能力的磁耦合装置 |
| US10903030B2 (en) | 2017-04-27 | 2021-01-26 | Magswitch Technology Worldwide Pty Ltd. | Variable field magnetic couplers and methods for engaging a ferromagnetic workpiece |
| US10806532B2 (en) | 2017-05-24 | 2020-10-20 | KindHeart, Inc. | Surgical simulation system using force sensing and optical tracking and robotic surgery system |
| EP3681368A4 (en) * | 2017-09-14 | 2021-06-23 | Vicarious Surgical Inc. | SURGICAL CAMERA SYSTEM WITH VIRTUAL REALITY |
| US10952801B2 (en) * | 2017-11-10 | 2021-03-23 | Intuitive Surgical Operations, Inc. | Systems and methods for controlling a robotic manipulator or associated tool |
| EP3709927A4 (en) | 2017-11-16 | 2020-12-23 | Intuitive Surgical Operations Inc. | MASTER / SLAVE REGISTRATION AND CONTROL FOR REMOTE OPERATION |
| CN110709024A (zh) | 2017-11-21 | 2020-01-17 | 直观外科手术操作公司 | 用于直观运动的主/工具配准和控制的系统和方法 |
| WO2019118767A1 (en) | 2017-12-14 | 2019-06-20 | Auris Health, Inc. | System and method for estimating instrument location |
| KR102678682B1 (ko) * | 2018-05-21 | 2024-06-25 | 텔레이그지스턴스 인크. | 원격조작 시스템, 정보처리 방법 및 프로그램 |
| CN110623747B (zh) * | 2018-06-22 | 2021-07-09 | 深圳市精锋医疗科技有限公司 | 连接机构、动力机构、操作臂及从操作设备 |
| CN109159115B (zh) * | 2018-08-17 | 2020-11-13 | 哈尔滨工业大学 | 一种面向科普的触觉通信装置 |
| US11597084B2 (en) | 2018-09-13 | 2023-03-07 | The Charles Stark Draper Laboratory, Inc. | Controlling robot torque and velocity based on context |
| US12008768B2 (en) | 2018-09-25 | 2024-06-11 | Visual Robotics Systems, Inc. | Spatially-aware camera and method thereof |
| CN118438439A (zh) * | 2018-10-22 | 2024-08-06 | 直观外科手术操作公司 | 用于主机/工具配准和控制以进行直观运动的系统和方法 |
| JP2022504368A (ja) * | 2018-10-25 | 2022-01-13 | ウィンク・ロボティクス | 美容ロボット工学のための着脱可能なエンドエフェクタ |
| US10926416B2 (en) * | 2018-11-21 | 2021-02-23 | Ford Global Technologies, Llc | Robotic manipulation using an independently actuated vision system, an adversarial control scheme, and a multi-tasking deep learning architecture |
| US12082898B2 (en) | 2019-02-06 | 2024-09-10 | Covidien Lp | Hand eye coordination system for robotic surgical system |
| US12605211B2 (en) | 2020-03-30 | 2026-04-21 | Intuitive Surgical Operations, Inc. | Method and system for facilitating remote presentation or interaction |
| US12251175B2 (en) | 2020-06-22 | 2025-03-18 | Auris Health, Inc. | Medical instrument driving |
| US12251177B2 (en) | 2020-06-22 | 2025-03-18 | Auris Health, Inc. | Control scheme calibration for medical instruments |
| WO2022002155A1 (zh) | 2020-07-01 | 2022-01-06 | 北京术锐技术有限公司 | 主从运动的控制方法、机器人系统、设备及存储介质 |
| WO2022230814A1 (ja) * | 2021-04-27 | 2022-11-03 | 川崎重工業株式会社 | ロボットシステム |
| WO2022261520A1 (en) * | 2021-06-11 | 2022-12-15 | Magswitch Technology, Inc. | Adjustable end-of-arm tool or fixture |
| US12552048B2 (en) | 2021-06-11 | 2026-02-17 | Magswitch Automation Company | Component handling systems and methods |
| US20250134609A1 (en) * | 2021-09-30 | 2025-05-01 | Covidien Lp | Setting remote center of motion in surgical robotic system |
| WO2023114136A1 (en) * | 2021-12-13 | 2023-06-22 | Genesis Medtech (USA) Inc. | Dynamic 3d scanning robotic laparoscope |
| NO347527B1 (en) * | 2022-05-20 | 2023-12-11 | Momek Tappingmate As | Robotic Tapping System for Electric Arc Furnace |
| CN117695016A (zh) * | 2022-08-24 | 2024-03-15 | 上海微创医疗机器人(集团)股份有限公司 | 机械臂的匹配方法、医生控制台和计算机可读存储介质 |
| US12565802B2 (en) | 2023-03-31 | 2026-03-03 | ABT Systems, LLC | Window actuator linkage assembly for alignment adjustment at a moveable portion of a window |
| CN121532143A (zh) | 2023-07-19 | 2026-02-13 | 直观外科手术操作公司 | 在器械的插入期间对成像装置定位以观察器械的部分 |
| CN121889103A (zh) | 2023-09-27 | 2026-04-17 | 直观外科手术操作公司 | 对准由计算机辅助系统支承的器械 |
| KR20250138512A (ko) * | 2024-03-13 | 2025-09-22 | 주식회사 리브스메드 | 수술용 장치를 구동하는 방법 및 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6424885B1 (en) * | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US20060258938A1 (en) * | 2005-05-16 | 2006-11-16 | Intuitive Surgical Inc. | Methods and system for performing 3-D tool tracking by fusion of sensor and/or camera derived data during minimally invasive robotic surgery |
| US20090033655A1 (en) * | 2007-08-02 | 2009-02-05 | Boca Remus F | System and method of three-dimensional pose estimation |
| US20100168562A1 (en) * | 2008-12-31 | 2010-07-01 | Intuitive Surgical, Inc. | Fiducial marker design and detection for locating surgical instrument in images |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2664205B2 (ja) | 1988-06-10 | 1997-10-15 | 株式会社日立製作所 | マニピュレータ制御システム |
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| ATE215430T1 (de) * | 1992-01-21 | 2002-04-15 | Stanford Res Inst Int | Endoskopisches chirurgisches instrument |
| JP3394322B2 (ja) * | 1994-05-19 | 2003-04-07 | ファナック株式会社 | 視覚センサを用いた座標系設定方法 |
| JP3402021B2 (ja) * | 1995-11-07 | 2003-04-28 | 株式会社明電舎 | ロボット装置の相対位置姿勢検出方法 |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| JP4020994B2 (ja) * | 1996-09-24 | 2007-12-12 | ファナック株式会社 | ロボットのツール座標系補正設定方法並びに該方法に使用するエンドエフェクタ |
| JPH1197311A (ja) | 1997-09-22 | 1999-04-09 | Isuzu Advanced Engineering Center Ltd | 電気二重層コンデンサ、電極及びその製造方法 |
| JPH1190868A (ja) * | 1997-09-24 | 1999-04-06 | Toyoda Mach Works Ltd | ロボット制御装置 |
| US6468265B1 (en) * | 1998-11-20 | 2002-10-22 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US6493608B1 (en) * | 1999-04-07 | 2002-12-10 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US6799065B1 (en) | 1998-12-08 | 2004-09-28 | Intuitive Surgical, Inc. | Image shifting apparatus and method for a telerobotic system |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| DE19961578A1 (de) | 1999-12-21 | 2001-06-28 | Bosch Gmbh Robert | Sensor mit zumindest einer mikromechanischen Struktur und Verfahren zur Herstellung |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| US8108072B2 (en) | 2007-09-30 | 2012-01-31 | Intuitive Surgical Operations, Inc. | Methods and systems for robotic instrument tool tracking with adaptive fusion of kinematics information and image information |
| US8971597B2 (en) | 2005-05-16 | 2015-03-03 | Intuitive Surgical Operations, Inc. | Efficient vision and kinematic data fusion for robotic surgical instruments and other applications |
| US9867669B2 (en) | 2008-12-31 | 2018-01-16 | Intuitive Surgical Operations, Inc. | Configuration marker design and detection for instrument tracking |
| EP2038712B2 (en) * | 2006-06-13 | 2019-08-28 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| US8000890B2 (en) * | 2007-11-30 | 2011-08-16 | General Electric Company | Image-guided navigation employing navigated point computation method and system |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| WO2010048164A2 (en) | 2008-10-20 | 2010-04-29 | University Of South Florida | N,n'-di-p-bromophenyl guanidine treatment for stroke at delayed timepoints |
| EP2355711B1 (en) * | 2008-10-20 | 2019-09-11 | The Johns Hopkins University | Environment property estimation and graphical display |
| IT1395018B1 (it) | 2009-07-22 | 2012-09-05 | Surgica Robotica S R L | Apparecchiatura per procedure chirurgiche minimamente invasive |
| US8888789B2 (en) * | 2009-09-23 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Curved cannula surgical system control |
| US8183520B2 (en) * | 2009-11-13 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Optical fiber shape sensor calibration |
| JP5704833B2 (ja) * | 2010-05-10 | 2015-04-22 | オリンパス株式会社 | 操作入力装置およびマニピュレータシステム |
| US9259289B2 (en) | 2011-05-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Estimation of a position and orientation of a frame used in controlling movement of a tool |
| EP2745268B1 (en) | 2011-09-13 | 2017-08-02 | Koninklijke Philips N.V. | Automatic online registration between a robot and images |
| US10772703B2 (en) * | 2017-08-25 | 2020-09-15 | Titan Medical Inc. | Methods and apparatuses for positioning a camera of a surgical robotic system to capture images inside a body cavity of a patient during a medical procedure |
-
2012
- 2012-01-27 US US13/360,380 patent/US9259289B2/en active Active
- 2012-05-10 EP EP12785315.8A patent/EP2706947B1/en active Active
- 2012-05-10 EP EP18179651.7A patent/EP3398550B1/en active Active
- 2012-05-10 KR KR1020187023683A patent/KR101957302B1/ko active Active
- 2012-05-10 JP JP2014510464A patent/JP6026515B2/ja active Active
- 2012-05-10 CN CN201280023715.8A patent/CN103533909B/zh active Active
- 2012-05-10 WO PCT/US2012/037310 patent/WO2012158458A2/en not_active Ceased
- 2012-05-10 KR KR1020137031922A patent/KR101891162B1/ko active Active
-
2016
- 2016-01-15 US US14/997,257 patent/US9827057B2/en active Active
-
2017
- 2017-09-28 US US15/719,275 patent/US10582974B2/en active Active
-
2020
- 2020-01-31 US US16/779,564 patent/US11284952B2/en active Active
-
2022
- 2022-02-22 US US17/677,866 patent/US11801100B2/en active Active
-
2023
- 2023-09-27 US US18/373,695 patent/US12364553B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6424885B1 (en) * | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US20060258938A1 (en) * | 2005-05-16 | 2006-11-16 | Intuitive Surgical Inc. | Methods and system for performing 3-D tool tracking by fusion of sensor and/or camera derived data during minimally invasive robotic surgery |
| US20090033655A1 (en) * | 2007-08-02 | 2009-02-05 | Boca Remus F | System and method of three-dimensional pose estimation |
| US20100168562A1 (en) * | 2008-12-31 | 2010-07-01 | Intuitive Surgical, Inc. | Fiducial marker design and detection for locating surgical instrument in images |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012158458A3 (en) | 2013-01-10 |
| US20220175475A1 (en) | 2022-06-09 |
| US20160206387A1 (en) | 2016-07-21 |
| US9827057B2 (en) | 2017-11-28 |
| JP2014518775A (ja) | 2014-08-07 |
| CN103533909A (zh) | 2014-01-22 |
| US11284952B2 (en) | 2022-03-29 |
| KR101891162B1 (ko) | 2018-08-24 |
| US20240016556A1 (en) | 2024-01-18 |
| KR101957302B1 (ko) | 2019-03-12 |
| US11801100B2 (en) | 2023-10-31 |
| CN103533909B (zh) | 2016-08-17 |
| KR20140022907A (ko) | 2014-02-25 |
| US9259289B2 (en) | 2016-02-16 |
| JP6026515B2 (ja) | 2016-11-16 |
| EP2706947A4 (en) | 2015-03-04 |
| WO2012158458A2 (en) | 2012-11-22 |
| US10582974B2 (en) | 2020-03-10 |
| EP3398550A1 (en) | 2018-11-07 |
| US20180014895A1 (en) | 2018-01-18 |
| EP2706947B1 (en) | 2018-07-04 |
| US20200170725A1 (en) | 2020-06-04 |
| EP3398550B1 (en) | 2022-11-02 |
| US20120290134A1 (en) | 2012-11-15 |
| US12364553B2 (en) | 2025-07-22 |
| EP2706947A2 (en) | 2014-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101957302B1 (ko) | 도구의 제어 움직임에 사용되는 프레임의 위치 및 방향을 추정하는 장치 및 방법 | |
| US12162143B2 (en) | Systems and methods for master/tool registration and control for intuitive motion | |
| CN116370080B (zh) | 用于控制机器人操纵器或相关工具的系统和方法 | |
| KR102858565B1 (ko) | 마스터 슬레이브 운동의 제어 방법, 로봇 시스템, 장비 및 저장 매체 | |
| KR102105142B1 (ko) | 입력 장치의 오퍼레이터가 볼 수 있는 디스플레이 영역으로 기구가 진입할 때 기구의 제어를 입력 장치로 전환하는 방법 | |
| KR102764208B1 (ko) | 컴퓨터 보조 원격조작 시스템에서의 2차 기구 제어 | |
| US20220401178A1 (en) | Robotic surgical navigation using a proprioceptive digital surgical stereoscopic camera system | |
| CN105188590A (zh) | 图像采集装置和可操纵装置活动臂受控运动过程中的碰撞避免 | |
| CN104490474A (zh) | 提供延伸到进入引导器远端外的可铰接器具的辅助视图的医疗机器人系统 | |
| JPH07328016A (ja) | 手術用マニピュレータシステム | |
| JP2012529971A (ja) | 低侵襲手術のための仮想測定ツール | |
| WO2018150489A1 (ja) | 手術器具の動作方法、ロボット手術システム、及びカメラ座標とロボットに関する座標との関係の推定プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A18-div-PA0104 St.27 status event code: A-0-1-A10-A16-div-PA0104 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-5-5-R10-R17-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 7 |