KR20180098008A - 자동초점 조절장치 및 방법 - Google Patents
자동초점 조절장치 및 방법 Download PDFInfo
- Publication number
- KR20180098008A KR20180098008A KR1020170024919A KR20170024919A KR20180098008A KR 20180098008 A KR20180098008 A KR 20180098008A KR 1020170024919 A KR1020170024919 A KR 1020170024919A KR 20170024919 A KR20170024919 A KR 20170024919A KR 20180098008 A KR20180098008 A KR 20180098008A
- Authority
- KR
- South Korea
- Prior art keywords
- index value
- focus
- image
- distance
- largest
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000000034 method Methods 0.000 title claims abstract description 86
- 230000008569 process Effects 0.000 claims description 22
- 238000004364 calculation method Methods 0.000 claims description 19
- 230000006870 function Effects 0.000 claims description 19
- 238000003384 imaging method Methods 0.000 claims description 6
- 230000001105 regulatory effect Effects 0.000 claims 1
- 238000012806 monitoring device Methods 0.000 description 12
- 239000000470 constituent Substances 0.000 description 5
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/282—Autofocusing of zoom lenses
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Studio Devices (AREA)
Abstract
본 실시예의 일 측면에 의하면, 초점을 조절하기 위해 초점 인덱스 값을 연산함에 있어, 복수의 방법 중 어느 하나를 선택하여 연산할 수 있도록 하여, 정확한 초점거리를 선정하며, 각 촬영거리에 대한 정밀한 초점 인덱스 값의 연산 없이도 신속하고 정확하게 초점거리를 선정할 수 있는 자동초점 조절장치 및 방법을 제공한다.
Description
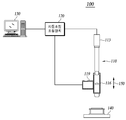
도 2는 본 발명의 일 실시예에 따른 자동초점 조절장치의 구성을 도시한 도면이다.
도 3은 본 발명의 일 실시예에 따른 제1 초점 인덱스 값 연산부가 초점 인덱스 값을 연산하는 과정을 도시한 그래프이다.
도 4는 본 발명의 일 실시예에 따른 제2 초점 인덱스 값 연산부가 초점 인덱스 값을 연산하는 과정을 도시한 그래프이다.
도 5는 본 발명의 일 실시예에 따른 초점거리 선정부가 초점 거리를 선정하는 과정을 도시한 그래프이다.
도 6은 본 발명의 일 실시예에 따른 자동초점 조절 방법을 도시한 순서도이다.

113: 이미지 센서 116: 렌즈
119: 모터 120: 자동초점 조절장치
130: 모니터링 장치 140: 피사체
150: 촬영거리 210: 제1 초점 인덱스 값 연산부
220: 제2 초점 인덱스 값 연산부 230: 메모리부
240: 초점거리 선정부 250: 연산 선택부
260: 모터 제어부 410: 기 설정된 범위
Claims (17)
- 렌즈를 이용해 피사체에 대한 복수의 이미지를 빠른 속도로 촬영하는 촬영장치와 연결되어, 상기 렌즈와 상기 피사체 간 촬영거리 내에서 자동으로 상기 피사체에 대한 초점거리를 조절하는 장치에 있어서,
상기 촬영거리를 제1 간격마다 바꾸어 생성된 이미지를 취득하여 각 이미지의 초점에 대한 인덱스(Index) 값을 연산하는 제1 초점 인덱스 값 연산부;
연산된 초점에 대한 인덱스 값 중 가장 큰 인덱스 값을 갖는 촬영 거리를 중심으로 기 설정된 범위 내에서 상기 촬영거리를 제2 간격마다 바꾸어 생성된 이미지를 취득하여 각 이미지의 초점에 대한 인덱스 값을 연산하는 제2 초점 인덱스 값 연산부;
상기 제1 초점 인덱스 값 연산부 또는 상기 제2 초점 인덱스 값 연산부가 취득한 이미지, 각 이미지의 촬영거리 및 각 이미지의 초점에 대한 인덱스 값을 매칭하여 저장하는 메모리부;
상기 메모리부에 저장된 이미지의 초점에 대한 인덱스 값 중 가장 큰 초점에 대한 인덱스 값 및 상기 가장 큰 초점에 대한 인덱스 값 전후로 연산된 기 설정된 개수의 초점에 대한 인덱스 값을 이용하여 상기 촬영거리 중 상기 피사체에 대한 초점거리를 선정하는 초점거리 선정부
를 포함하는 것을 특징으로 하는 초점거리 조절장치. - 제1항에 있어서,
상기 제1 초점 인덱스 값 연산부 또는 제2 초점 인덱스 값 연산부는,
상기 각 이미지의 초점에 대한 인덱스 값을 연산함에 있어, 콘트라스트(Contrast) 방식 또는 이산 코사인 변환(DCT: Discrete Cosine Transform) 방식을 선택적으로 이용하는 것을 특징으로 하는 초점거리 조절장치. - 제2항에 있어서,
상기 제1 초점 인덱스 값 연산부 또는 제2 초점 인덱스 값 연산부는,
상기 콘트라스트 방식을 이용하는 경우, 상기 피사체에 대한 이미지 내 포함된 모든 화소(Pixel)에 대하여, 각 화소를 기준으로 가로, 세로 또는 대각선 방향으로 기 설정된 오프셋(Offset)만큼 떨어진 화소와의 차이값의 절대값 또는 제곱값을 초점에 대한 인덱스 값으로 연산하는 것을 특징으로 하는 초점거리 조절장치. - 제2항에 있어서,
상기 제1 초점 인덱스 값 연산부 또는 제2 초점 인덱스 값 연산부는,
상기 이산 코사인 변환 방식을 이용하는 경우, 상기 피사체에 대한 이미지를 이산 코사인 변환하여 가장 작은 수평 주파수 성분 내지 n번째 작은 수평 주파수 성분 및 가장 작은 수직 주파수 성분 내지 n번째 작은 수직 주파수 성분 만의 계수값의 절대값 또는 제곱값을 초점에 대한 인덱스 값으로 연산하는 것을 특징으로 하는 초점거리 조절장치. - 제4항에 있어서,
상기 제1 초점 인덱스 값 연산부 또는 제2 초점 인덱스 값 연산부는,
상기 피사체에 대한 이미지를 이산 코사인 변환함에 있어, 상기 피사체에 대한 이미지를 기 설정된 개수의 화소가 포함된 하나 이상의 구역으로 나누어, 각 구역의 초점에 대한 인덱스 값을 연산하여 상기 각 구역의 초점에 대한 인덱스 값의 합을 상기 피사체에 대한 이미지의 초점에 대한 인덱스 값으로 연산하는 것을 특징으로 하는 초점거리 조절장치. - 제1항에 있어서,
상기 제2 간격은,
상기 제1 간격보다 좁은 것을 특징으로 하는 초점거리 조절장치. - 제1항에 있어서,
상기 초점거리 선정부는,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값에 따라 상기 피사체에 대한 초점거리를 선정하는 방식을 달리하는 것을 특징으로 하는 초점거리 조절장치. - 제7항에 있어서,
상기 초점거리 선정부는,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값이 동일한 경우, 상기 가장 큰 초점에 대한 인덱스 값을 갖는 촬영거리를 상기 피사체에 대한 초점거리로 선정하는 것을 특징으로 하는 초점거리 조절장치. - 제7항에 있어서,
상기 초점거리 선정부는,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값이 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값보다 큰 경우, 상기 촬영 거리 및 상기 각 이미지의 초점에 대한 인덱스 값을 함수로 생성하여, 상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 두 번째 전에 연산된 인덱스 값을 지나는 직선 및 상기 가장 큰 초점에 대한 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값을 지나는 직선이 교차하는 점에서의 촬영거리를 상기 피사체에 대한 초점거리로 선정하는 것을 특징으로 하는 초점거리 조절장치. - 제7항에 있어서,
상기 초점거리 선정부는,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값이 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값보다 작은 경우, 상기 촬영 거리 및 상기 각 이미지의 초점에 대한 인덱스 값을 함수로 생성하여, 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 두 번째 후에 연산된 인덱스 값을 지나는 직선 및 상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값을 지나는 직선이 교차하는 점에서의 촬영거리를 상기 피사체에 대한 초점거리로 선정하는 것을 특징으로 하는 초점거리 조절장치. - 제1항에 있어서,
상기 제1 초점 인덱스 값 연산부 또는 제2 초점 인덱스 값 연산부가 상기 각 이미지의 초점에 대한 인덱스 값을 연산할 방식을 상기 초점거리 조절장치의 사용자로부터 입력받아 선택하는 연산 선택부를 더 포함하는 것을 특징으로 하는 초점거리 조절장치. - 렌즈를 이용해 피사체에 대한 복수의 이미지를 빠른 속도로 촬영하는 촬영장치와 연결되어, 상기 렌즈와 상기 피사체 간 촬영거리 내에서 자동으로 상기 피사체에 대한 초점거리를 조절하는 방법에 있어서,
상기 촬영거리에 대해 제1 간격마다 상기 피사체에 대한 이미지를 취득하여 각 이미지의 초점에 대한 인덱스(Index) 값을 연산하는 제1 초점 인덱스 값 연산과정;
연산된 초점에 대한 인덱스 값 중 가장 큰 인덱스 값을 갖는 촬영 거리를 중심으로 기 설정된 범위 내에서 제2 간격마다 상기 피사체에 대한 이미지를 취득하여 각 이미지의 초점에 대한 인덱스 값을 연산하는 제2 초점 인덱스 값 연산과정;
상기 제1 초점 인덱스 값 연산과정 및 상기 제2 초점 인덱스 값 연산과정에서 취득된, 상기 피사체에 대한 이미지, 각 이미지의 촬영거리 및 각 이미지의 초점에 대한 인덱스 값을 매칭하여 저장하는 저장과정;
상기 저장과정에서 저장된 이미지의 초점에 대한 인덱스 값 중 가장 큰 초점에 대한 인덱스 값 및 상기 가장 큰 초점에 대한 인덱스 값 전후로 연산된 기 설정된 개수의 초점에 대한 인덱스 값을 이용하여 상기 촬영거리 중 상기 피사체에 대한 초점거리를 선정하는 초점거리 선정과정
을 포함하는 것을 특징으로 하는 초점거리 조절방법. - 제12항에 있어서,
상기 제1 초점 인덱스 값 연산과정 또는 제2 초점 인덱스 값 연산과정은,
상기 각 이미지의 초점에 대한 인덱스 값을 연산함에 있어, 콘트라스트(Contrast) 방식 또는 이산 코사인 변환(DCT: Discrete Cosine Transform) 방식을 선택적으로 이용하는 것을 특징으로 하는 초점거리 조절방법. - 제12항에 있어서,
상기 초점거리 선정과정은,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값에 따라 상기 피사체에 대한 초점거리를 선정하는 방식을 달리하는 것을 특징으로 하는 초점거리 조절방법. - 제14항에 있어서,
상기 초점거리 선정과정,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값이 동일한 경우, 상기 가장 큰 초점에 대한 인덱스 값을 갖는 촬영거리를 상기 피사체에 대한 초점거리로 선정하는 것을 특징으로 하는 초점거리 조절방법. - 제14항에 있어서,
상기 초점거리 선정과정,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값이 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값보다 큰 경우, 상기 촬영 거리 및 상기 각 이미지의 초점에 대한 인덱스 값을 함수로 생성하여, 상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 두 번째 전에 연산된 인덱스 값을 지나는 직선 및 상기 가장 큰 초점에 대한 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값을 지나는 직선이 교차하는 점에서의 촬영거리를 상기 피사체에 대한 초점거리로 선정하는 것을 특징으로 하는 초점거리 조절방법. - 제14항에 있어서,
상기 초점거리 선정과정,
상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값이 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값보다 작은 경우, 상기 촬영 거리 및 상기 각 이미지의 초점에 대한 인덱스 값을 함수로 생성하여, 상기 가장 큰 초점에 대한 인덱스 값 직후에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값 두 번째 후에 연산된 인덱스 값을 지나는 직선 및 상기 가장 큰 초점에 대한 인덱스 값 직전에 연산된 인덱스 값과 상기 가장 큰 초점에 대한 인덱스 값을 지나는 직선이 교차하는 점에서의 촬영거리를 상기 피사체에 대한 초점거리로 선정하는 것을 특징으로 하는 초점거리 조절방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170024919A KR20180098008A (ko) | 2017-02-24 | 2017-02-24 | 자동초점 조절장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170024919A KR20180098008A (ko) | 2017-02-24 | 2017-02-24 | 자동초점 조절장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180098008A true KR20180098008A (ko) | 2018-09-03 |
Family
ID=63600981
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170024919A Ceased KR20180098008A (ko) | 2017-02-24 | 2017-02-24 | 자동초점 조절장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20180098008A (ko) |
-
2017
- 2017-02-24 KR KR1020170024919A patent/KR20180098008A/ko not_active Ceased
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109712192B (zh) | 摄像模组标定方法、装置、电子设备及计算机可读存储介质 | |
| US9313419B2 (en) | Image processing apparatus and image pickup apparatus where image processing is applied using an acquired depth map | |
| US9489747B2 (en) | Image processing apparatus for performing object recognition focusing on object motion, and image processing method therefor | |
| US10395348B2 (en) | Image pickup apparatus, image processing apparatus, and control method of image pickup apparatus | |
| US7941042B2 (en) | Auto-focus method, medium, and apparatus for image-capturing | |
| US10511781B2 (en) | Image pickup apparatus, control method for image pickup apparatus | |
| US9531938B2 (en) | Image-capturing apparatus | |
| CN109255810B (zh) | 图像处理装置及图像处理方法 | |
| US8648961B2 (en) | Image capturing apparatus and image capturing method | |
| US20080050108A1 (en) | Imaging apparatus | |
| US11831979B2 (en) | Image pickup apparatus, an image processing method and a non-transitory computer-readable medium for displaying a plurality of images different in in-focus position | |
| JP2014138290A (ja) | 撮像装置及び撮像方法 | |
| JP7271353B2 (ja) | 撮像装置および波長取得方法 | |
| US9591202B2 (en) | Image processing apparatus and image processing method for generating recomposed images | |
| JP2015207090A (ja) | 画像処理装置、及びその制御方法 | |
| US9769376B2 (en) | Imaging device, imaging device body, and lens barrel | |
| US10326951B2 (en) | Image processing apparatus, image processing method, image capturing apparatus and image processing program | |
| KR101599434B1 (ko) | 자동 초점 조절을 이용한 영상촬상장치의 공간감지장치 및 공간감지방법 | |
| KR101890188B1 (ko) | 필름층을 구비한 피사체에 대한 자동초점 조절장치 및 방법 | |
| KR20180098008A (ko) | 자동초점 조절장치 및 방법 | |
| JP2014134723A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP6645690B2 (ja) | 自動焦点調節装置、撮像装置、および自動焦点調節方法 | |
| JP2016080738A (ja) | 撮像装置、自動合焦方法 | |
| JP6525710B2 (ja) | 撮像装置及びその制御方法、並びにプログラム | |
| EP2735138B1 (en) | System and method for focusing an electronic imaging system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20170224 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20180801 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20190219 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20190817 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20190219 Comment text: Notification of reason for refusal Patent event code: PE06011S01I Patent event date: 20180801 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |