KR20170083854A - 가변형 바퀴가 장착된 이동로봇 - Google Patents
가변형 바퀴가 장착된 이동로봇 Download PDFInfo
- Publication number
- KR20170083854A KR20170083854A KR1020160003253A KR20160003253A KR20170083854A KR 20170083854 A KR20170083854 A KR 20170083854A KR 1020160003253 A KR1020160003253 A KR 1020160003253A KR 20160003253 A KR20160003253 A KR 20160003253A KR 20170083854 A KR20170083854 A KR 20170083854A
- Authority
- KR
- South Korea
- Prior art keywords
- wheel
- mobile robot
- unit
- spokes
- obstacle
- Prior art date
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B9/00—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces
- B60B9/26—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces comprising resilient spokes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B9/00—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces
- B60B9/26—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces comprising resilient spokes
- B60B9/28—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces comprising resilient spokes with telescopic action
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
본 발명은 이동로봇에 관한 것으로, 더욱 상세하게는 평지에서는 원형의 바퀴형상을 유지하고, 계단 등의 장애물을 만나면 바퀴에 형성된 스포크의 길이를 조절하여 바퀴의 형상을 변형하여 주행할 수 있도록 한 가변형 바퀴가 장착된 이동로봇에 관한 것이다.
상기한 목적을 달성하기 위한 본 발명의 가변형 바퀴가 장착된 이동로봇은,
좌우 양측에 구동축(111)이 형성된 구동모터(110)가 설치된 몸체(100); 상기 몸체(100)의 외면 일측에 형성된 센서부(200); 상기 몸체(100)의 일측에 형성된 제어부(300); 상기 구동모터(110)의 동력을 전달받아 회전되는 회전축(410)과, 상기 회전축(410)의 선단에 형성되는 바퀴허브(420)와, 상기 바퀴허브(420)의 외주면에 일정간격으로 이격되어 방사상으로 다수개 설치되는 길이가 조절되는 스포크(430)와, 상기 스포크(430)의 선단에 각각 형성되어 노면에 접지되는 접지부(440)로 구성된 바퀴유닛(400); 으로 이루어지며 상기 바퀴유닛(400)이 상기 구동모터(110)의 좌우 양측에 형성된 구동축(111)에 각각 설치되어 된 것을 특징으로 한다.
상기한 목적을 달성하기 위한 본 발명의 가변형 바퀴가 장착된 이동로봇은,
좌우 양측에 구동축(111)이 형성된 구동모터(110)가 설치된 몸체(100); 상기 몸체(100)의 외면 일측에 형성된 센서부(200); 상기 몸체(100)의 일측에 형성된 제어부(300); 상기 구동모터(110)의 동력을 전달받아 회전되는 회전축(410)과, 상기 회전축(410)의 선단에 형성되는 바퀴허브(420)와, 상기 바퀴허브(420)의 외주면에 일정간격으로 이격되어 방사상으로 다수개 설치되는 길이가 조절되는 스포크(430)와, 상기 스포크(430)의 선단에 각각 형성되어 노면에 접지되는 접지부(440)로 구성된 바퀴유닛(400); 으로 이루어지며 상기 바퀴유닛(400)이 상기 구동모터(110)의 좌우 양측에 형성된 구동축(111)에 각각 설치되어 된 것을 특징으로 한다.
Description
본 발명은 이동로봇에 관한 것으로, 더욱 상세하게는 평지에서는 원형의 바퀴형상을 유지하고, 계단 등의 장애물을 만나면 바퀴에 형성된 스포크의 길이를 조절하여 바퀴의 형상을 변형하여 주행할 수 있도록 한 가변형 바퀴가 장착된 이동로봇에 관한 것이다.
일반적으로 이동로봇은 원형의 바퀴를 이용하여 이동로봇 자체로 운행하거나, 휠체어 등과 같은 설치대상물에 적용하여 사용되는 것이다.
이러나, 상기와 같은 이동로봇에 원형바퀴를 적용하여 사용할 경우, 원형바퀴의 반지름 이상의 높이를 갖는 장애물은 승월하지 못하는 단점이 있다. 따라서 장애물의 승월이 가능한 다양한 기술이 개발되어져 왔다.
그 종래의 기술로는 이동로봇에 관절을 갖는 보행다리를 형성하고 그 보행다리의 하부에 바퀴를 설치하는 탐사용 보행로봇이 있으며, 상기와 같은 보행로봇은 허벅지부와 종아리부를 갖는 관절이 포함하여 형성된 다수의 보행다리가 설치된 것으로 이는 그 장치의 구성이 매우 복잡하여 다양한 설치대상물에 적용하여 사용하기는 어렵다.
따라서, 주행시에는 원형의 바퀴를 사용하고, 장애물을 승월하고자 할때는 바퀴와 별도로 형성된 스포크를 사용하는 이동로봇이 대한민국 등록특허 제1211786호(2012. 12. 06, 평지 및 계단 주행이 가능한 변형 바퀴, 바퀴조립체 및 이를 구비한 이동로봇)이 개시되어 있다.
상기 기술은 휠(210); 상기 휠(210)의 가장자리 내측에 설치되며, 회동에 의해 자유단부가 상기 휠(210) 외측으로 돌출되도록 일측부가 상기 휠(210)에 축결합되는 스포크(220); 및 모터(410)의 동력을 상기 휠(210)에 전달하는 휠 기어부(231)와, 상기 스포크(220)의 일측부에 전달하는 스포크 기어부(232)와, 상기 모터(410)와 상기 휠 기어부(231) 및 스포크 기어부(232) 사이에서 상기 휠 기어부(231) 및 스포크 기어부(232)에 선택적으로 연결되는 이동 기어부(233)가 구비되는 기어박스(230);를 포함하되, 상기 기어박스(230)는, 상기 기어박스의 휠 기어부(231)에 구비되며, 상기 휠(210)의 회전축과 동축상에 연결되는 제1기어(231a) 및 상기 기어박스의 스포크 기어부(232)에 구비되며, 상기 제1기어(231a)와 동일한 기어치 형상, 갯수로, 상기 제1기어(231a)와 동축상에 설치되는 제2기어(232a)를 포함하며, 상기 이동 기어부(233)는, 상기 제1기어(231a), 제2기어(232a)에 동시 접속 가능한 폭을 가지고 상기 모터(410)의 회전축에 연결되며, 상기 제1기어(231a)와 제2기어(232a) 전부에 접속된 상태에서, 상기 제2기어(232a)측으로 이동되어 상기 제2기어(232a)에만 접속된 상태로 전환되는 이동 기어(233a)를 더 포함하여 구성되는 것이다.
상기와 같은 구성으로 된 이동로봇은 원형의 휠과는 별도로 구성되어 장애물을 승월하고자 할때 다수개의 스포크를 동시에 출몰조정하여 사용하는 것이 주된 특징이다.
이는, 평지를 이동하고자 할때는 원형의 바퀴를 사용하여 이동하고, 장애물이 나타났을때는 스포크를 사용하여 승월할 수 있도록 된 것이지만, 상기 다수개로 이루어진 스포크는 동시에 출몰조정되도록 구성되어 있어 폭과 높이가 동일하지 않은 계단과 같은 장애물을 승월하고자 할때는 각각의 스포크를 개별적으로 조정하여 사용할 수 없으므로 그 이동이 불안정한 문제점이 있으며 또한, 원형의 바퀴와 스포크를 별도의 구성으로 형성하여야 하므로 그 제작비용이 상승하는 문제점이 있었다.
본 고안의 목적은 평지를 이동하거나 장애물을 넘어야 할 때, 각각의 상황에 맞추어 형상이 가변될 수 있도록 접지부와 스포크가 형성된 바퀴가 설치되어, 장애물을 넘거나 경사로를 이동할 때에도 수평을 유지할 수 있는 이동로봇을 제공하는 데 있다.
상기한 목적을 달성하기 위한 본 발명의 가변형 바퀴가 장착된 이동로봇은, 좌우 양측에 구동축(111)이 형성된 구동모터(110)가 설치된 몸체(100); 상기 몸체(100)의 외면 일측에 형성된 센서부(200); 상기 몸체(100)의 일측에 형성된 제어부(300); 상기 구동모터(110)의 동력을 전달받아 회전되는 회전축(410)과, 상기 회전축(410)의 선단에 형성되는 바퀴허브(420)와, 상기 바퀴허브(420)의 외주면에 일정간격으로 이격되어 방사상으로 다수개 설치되는 길이가 조절되는 스포크(430)와, 상기 스포크(430)의 선단에 각각 형성되어 노면에 접지되는 접지부(440)로 구성된 바퀴유닛(400); 으로 이루어지며 상기 바퀴유닛(400)이 상기 구동모터(110)의 좌우 양측에 형성된 구동축(111)에 각각 설치되어 된 것을 특징으로 한다.
상기한 구성으로 이루어진 가변형바퀴가 장착된 이동로봇에 따르면, 길이가 조절되는 스포크의 작동으로 인해, 평지를 이동 할때는 원형형상의 바퀴로 이동할 수 있으며, 계단 또는 험로와 같은 장애물을 넘어야 할 때는 제어부에서 각각의 스포크의 길이를 조절하여 이동할 수 있게 된다.
또한, 거리와 수평을 감지하는 센서가 형성되어, 장애물을 넘거나 경사로를 이동할 때에도 수평을 유지한 채 이동할 수 있는 효과가 있다.
도 1은 본 발명의 가변형 바퀴가 장착된 이동로봇의 사시도,
도 2는 본 발명의 스포크의 길이가 확장된 상태를 나타낸 사시도,
도 3은 본 발명의 가변형 바퀴가 장착된 이동로봇의 바퀴유닛을 분리한 사시도,
도 4는 본 발명의 가변형 바퀴가 장착된 이동로봇이 이동수단의 바퀴로 적용된 상태도,
도 5는 본 발명의 가변형 바퀴가 장착된 이동로봇이 전후로 각각 배치되고 연결프레임에 의해 이격되게 설치된 상태를 나타낸 사시도,
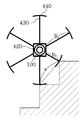
도 6은 본 발명의 가변형 바퀴가 장착된 이동로봇이 계단을 승월하는 상태를 나타낸 개략도,
도 7은 본 발명의 가변형 바퀴가 장착된 이동로봇이 계단을 승월하는 다른 상태를 나타낸 개략도,
도 8은 본 발명의 가변형 바퀴가 장착된 이동로봇이 좌우로 경사진 노면을 이동하는 상태를 나타낸 개략도,
도 9는 본 발명의 가변형 바퀴가 장착된 이동로봇이 경사로를 등판하는 상태를 나타낸 개략도.
도 2는 본 발명의 스포크의 길이가 확장된 상태를 나타낸 사시도,
도 3은 본 발명의 가변형 바퀴가 장착된 이동로봇의 바퀴유닛을 분리한 사시도,
도 4는 본 발명의 가변형 바퀴가 장착된 이동로봇이 이동수단의 바퀴로 적용된 상태도,
도 5는 본 발명의 가변형 바퀴가 장착된 이동로봇이 전후로 각각 배치되고 연결프레임에 의해 이격되게 설치된 상태를 나타낸 사시도,
도 6은 본 발명의 가변형 바퀴가 장착된 이동로봇이 계단을 승월하는 상태를 나타낸 개략도,
도 7은 본 발명의 가변형 바퀴가 장착된 이동로봇이 계단을 승월하는 다른 상태를 나타낸 개략도,
도 8은 본 발명의 가변형 바퀴가 장착된 이동로봇이 좌우로 경사진 노면을 이동하는 상태를 나타낸 개략도,
도 9는 본 발명의 가변형 바퀴가 장착된 이동로봇이 경사로를 등판하는 상태를 나타낸 개략도.
일반적으로 이동로봇은 원형의 바퀴를 사용하여 평지를 이동하고, 계단과 같은 장애물을 만나면 별도의 관절을 갖는 보행다리와 같은 수단을 사용하여 이동하며, 조난자를 수색하거나, 군사작전시 정찰에 사용된다.
또한, 휠체어와 같은 이동수단에 적용하여 그 이동수단이 이동할 수 있도록 하는 것이다.
본 발명은, 평지를 이동하거나 장애물을 넘어야 할 때, 각각의 상황에 맞추어 형상이 가변될 수 있도록 접지부와 스포크가 형성된 바퀴가 설치되어, 장애물을 넘거나 경사로를 이동할 때에도 수평을 유지할 수 있는 이동로봇에 관한 것이다.
이하, 첨부된 도면을 참조하여 본 발명의 바람직한 실시 예에 따른 가변형바퀴가 장착된 이동로봇을 상세히 설명하기로 한다.
본 발명의 가변형바퀴가 장착된 이동로봇은 몸체(100), 센서부(200), 제어부(300), 바퀴유닛(400)를 포함하여 형성된다.
상기 몸체(100)에는 좌우 양측에 구동축(111)이 형성된 구동모터(110)가 설치되어 있으며, 바람직하게는 상기 몸체(100)의 내부에 구동모터(110)의 본체가 수용되고, 상기 구동축(111)은 상기 몸체(100)의 좌우 양측을 관통하여 돌출되도록 형성되는 것이다.
이때, 상기 몸체(100)의 형상은 도면에 도시된 형상에 한정되지 아니하며, 내부에 구동모터의 본체가 수용될 수 있는 수용공간이 확보되고, 좌우 양측에 구동축(111)이 관통될 수 있도록 관통공(112)이 형성된 형상의 것이면 된다.
아울러, 상기 구동모터(110)는 이동로봇이 전진 또는 후진이 가능하도록 정역모터를 사용하는것이 바람직하다.
상기 센서부(200)는 주행영역을 효과적으로 추정하기 위해 설치되는 것으로, 거리를 감지하는 거리감지수단(210)와, 상기 몸체(100)의 기울기를 감지하는 기울기센서(220)로 구성된다.
상기 거리감지수단(210)은 주행영역의 거리 및 장애물의 정보를 얻기위해 설치되는 것으로 바람직하게는 초음파센서를 사용하거나, 카메라를 사용할 수 있으며, 상기 초음파센서나 카메라를 활용하여 주행에 필요한 정보를 얻을 수 있는 방법은 종래에 널리 사용되고 있는 것으로 자세한 설명은 생략하기로 한다.
또한, 레이저센서를 사용하여 거리정보를 얻을 수 있는데, 이동로봇에서 요구되는 거리정보는 일반적인 단일지향 레이저센서로는 얻을 수 없는 것이므로, 이때에는 다중 레이어를 갖는 레이저거리센서를 이용하여 각 레이어에 대해 지향 방향에 수직되게 직선으로 이루어진 거리정보를 획득할 수 있는 레이저센서를 사용하는 것으로 한다.
상기 기울기센서(220)는 이동로봇의 전,후,좌,우의 기울기를 측정할 수 있도록 설치되는 것으로, 바람직하게는 자이로센서 또는 중력센서를 사용하거나 상기 자이로센서 및 중력센서를 병행하여 사용할 수 있으며, 자이로 드리프트(drift)로 인해 발생되는 오차를 줄이기 위해 가속도센서를 함께 사용할 수도 있다.
상기 제어부(300)는 상기 거리감지수단(210)으로부터 얻은 정보와, 상기 기울기센서(220)를 통해 얻은 정보를 계산하여, 이동로봇의 주행이 원활하도록 상기 바퀴유닛을 제어하기 위해 설치되는 것이다.
이때, 상기 제어부(300)는 도면에 도시된 바와 같이 몸체(100)의 외면 일측에 형성되어도 되며, 몸체의 내부에 수용되어도 무방하다.
상기 바퀴유닛(400)은 상기 구동모터(110)의 동력을 전달받아 회전되는 회전축(410)과, 상기 회전축(410)의 선단에 형성되는 바퀴허브(420)와, 상기 바퀴허브(420)의 외주면에 일정간격으로 이격되어 방사상으로 다수개 설치되는 길이가 조절되는 스포크(430)와, 상기 스포크(430)의 선단에 각각 형성되어 노면에 접지되는 접지부(440)로 구성되어 진다.
상기와 같이 구성된 바퀴유닛(400)이 상기 구동모터(110)의 좌우 양측에 형성된 구동축(111)에 각각 설치되면 가변형 바퀴가 장착된 이동로봇으로 기능을 하게 되는 것이다.
이때, 상기 스포크(430)와 접지부(440)의 형상과 그 분할되는 갯수는 사용자의 의도에 맞추어 형성하면 되고, 도시된 형상에 한정되지 아니한다.
또한, 상기 스포크(430)는 상기 제어부(300)의 신호에 따라 길이가 가변되는 것으로, 직선왕복운동이 가능하도록 로드를 갖는 형상의 것이면 되고, 그 방식은 리니어모터를 사용하는것이 바람직하다.
아울러, 상기 바퀴허브(420)에는 슬립링(미도시)이 내장되어 상기 제어부(300)로부터 상기 스포크(430)로 신호를 전달하고 상기 스포크(430)의 동작에 필요한 전원을 공급할 수 있는 것이다.
이때, 상기 구동모터(110)와 스포크(430)의 작동에 필요한 전원을 공급하는 전원부(미도시)는 상기 몸체(100)의 일측에 형성하면 된다.
상기와 같이 구성된 가변형 바퀴가 장착된 이동로봇은, 그 자체로 작전 및 정찰에 쓰이는 군용로봇으로 사용되거나, 별도의 이동수단(500)의 바퀴로 사용될 수도 있다.
이때, 상기 이동수단(500)은 장애인이나 부상자가 사용하는 휠체어가 주로 그 대상이 되며, 그 밖에도 세그웨이(미도시)와 같은 좌우양측에 바퀴가 설치된 이륜형 탈것에 적용할 수 있다.
또한, 가변형 바퀴가 장착된 이동로봇이 전후로 각각 배치되고 연결프레임(600)에 의해 이격되게 연결설치하여 사륜형의 이동로봇으로 구성하여 사용할 수도 있다.
이하에서는 첨부된 도면을 참조하여 가변형 바퀴가 장착된 이동로봇이 계단 및 경사로를 이동할 때, 상기 센서부(200)로부터 전달된 수치를 이용하여 제어부(300)에서 수행하는 계산과정을 설명하기로 한다.
동일한 길이의 스포크(430)로 이루어진 바퀴유닛(400)이 승월할 수 있는 계단폭(W)과 계단높이(H)는 다음과 같다.

이때, 계단간의 빗변(a)과 계단의 밑각( )은 다음과 같다.
)은 다음과 같다.

여기서, R은 스포크(430)의 길이 또는 바퀴의 반지름,  는 스포크간의 각도이다.
는 스포크간의 각도이다.
길이가 서로 다르게 조절된 스포크(430)로 이루어진 바퀴유닛(400)이 계단을 승월하는 경우의 계산식은 다음과 같다.

여기서,  은 긴 스포크의 길이이고,
은 긴 스포크의 길이이고,  는 짧은 스포크의 길이이며, a는 승월할 수 있는 빗볏의 값이다.
는 짧은 스포크의 길이이며, a는 승월할 수 있는 빗볏의 값이다.
다음은, 상기 바퀴유닛(400)이 좌륜과 우륜으로 사용되는 이동로봇의 주행로의 노면이 평탄하지 않고 좌우로 경사진 경우, 이동로봇이 좌우로 기울러지지않고 수펴을 유지하기 위한 좌륜과 우륜의 스포크(430)의 길이 조절에 필요한 관계식은 다음과 같다.
여기서, D는 상기 좌륜과 우륜간의 축거리이고,  는 좌륜의 바퀴유닛(400)의 반지름 또는 스포크(430)의 길이 이고,
는 좌륜의 바퀴유닛(400)의 반지름 또는 스포크(430)의 길이 이고,  는 좌우의 경사각이다.
는 좌우의 경사각이다.
다음은, 이동로봇을 전륜과 후륜으로 각각 배치하고 상기 연결프레임(600)에 연결하여 사륜형의 이동로봇으로 사용하는 경우, 이동로봇의 중심이 수평을 유지하기 위한 전륜과 후륜 및 스포크길이의 관계식이다.
여기서, L은 경사로 등판시에 상기 전륜과 후륜간의 거리이고,  는 전륜의 바퀴유닛(400)의 반지름 또는 스포크(430)의 길이이며,
는 전륜의 바퀴유닛(400)의 반지름 또는 스포크(430)의 길이이며,  는 상기 후륜의 바퀴유닛(400)의 반지름 또는 스포크(430)의 길이이고,
는 상기 후륜의 바퀴유닛(400)의 반지름 또는 스포크(430)의 길이이고,  는 경사로의 등판각이다.
는 경사로의 등판각이다.
상기와 같이 구성된 본 발명에 따르면, 가변형 바퀴가 장착된 이동로봇가 주행할 때, 센서부가 노면과 장애물의 정보를 제어부로 전달하고, 제어부에서 스포크를 상황에 맞도록 조절하게 되며, 길이가 조절되는 스포크의 작동으로 인해, 평지를 이동 할때는 원형형상의 바퀴로 이동할 수 있으며, 장애물을 넘어야 할 때는 제어부에서 각각의 스포크의 길이를 조절하여 계단 또는 험로에서도 이동할 수 있게 되는 것이다.
또한, 거리와 수평을 감지하는 센서가 형성되어, 장애물을 넘거나 경사로를 이동할 때에도 수평을 유지한 채 이동할 수 있는 효과가 있다.
아울러, 장애인이나 부상자가 사용하는 휠체어 또는 세그웨이와 같은 탈것의 바퀴부로 사용하게되면 사용자의 이동경로의 제한이 줄어들 수 있게 되는 것이다.
100 : 몸체
110 : 구동모터
111 : 구동축 200 : 센서부
210 : 거리감지센서 220 : 기울기센서
300 : 제어부 400 : 바퀴유닛
410 : 회전축 420 : 바퀴허브
430 : 스포크 440 : 접지부
500 : 이동수단 600 : 연결프레임
111 : 구동축 200 : 센서부
210 : 거리감지센서 220 : 기울기센서
300 : 제어부 400 : 바퀴유닛
410 : 회전축 420 : 바퀴허브
430 : 스포크 440 : 접지부
500 : 이동수단 600 : 연결프레임
Claims (4)
- 좌우 양측에 구동축(111)이 형성된 구동모터(110)가 설치된 몸체(100);
상기 몸체(100)의 외면 일측에 주행영역의 장애물정보와, 몸체(100)의 기울기를 측정하기 위해 형성된 센서부(200);
상기 몸체(100)의 일측에 상기 센서부(200)로부터 전달된 수치를 계산하여 바퀴유닛(400)을 제어하기 위해 형성된 제어부(300);
상기 구동모터(110)의 동력을 전달받아 회전되는 회전축(410)과, 상기 회전축(410)의 선단에 형성되는 바퀴허브(420)와, 상기 바퀴허브(420)의 외주면에 일정간격으로 이격되어 방사상으로 다수개 설치되는 길이가 조절되는 스포크(430)와, 상기 스포크(430)의 선단에 각각 형성되어 노면에 접지되는 접지부(440)로 구성된 바퀴유닛(400); 으로 이루어지며,
상기 바퀴유닛(400)이 상기 구동모터(110)의 좌우 양측에 형성된 구동축(111)에 각각 설치되어 된 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇. - 제 1항에 있어서,
상기 센서부(200)는 이동로봇과 장애물간의 거리를 감지하는 거리감지수단(210)과, 상기 몸체(100)의 기울기를 감지하는 기울기센서(220)로 구성된 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇.
- 제 1항에 있어서,
상기 가변형 바퀴가 장착된 이동로봇은 이동수단(500)의 바퀴로 사용되는 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇. - 제 1항에 있어서,
상기 가변형 바퀴가 장착된 이동로봇은 전후로 각각 배치되고 연결프레임(600)에 의해 이격되게 연결설치된 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160003253A KR20170083854A (ko) | 2016-01-11 | 2016-01-11 | 가변형 바퀴가 장착된 이동로봇 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160003253A KR20170083854A (ko) | 2016-01-11 | 2016-01-11 | 가변형 바퀴가 장착된 이동로봇 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170083854A true KR20170083854A (ko) | 2017-07-19 |
Family
ID=59427558
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160003253A KR20170083854A (ko) | 2016-01-11 | 2016-01-11 | 가변형 바퀴가 장착된 이동로봇 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170083854A (ko) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180081667A (ko) * | 2017-01-07 | 2018-07-17 | 고인순 | 자전거 바퀴 휠 |
| KR101984854B1 (ko) * | 2018-01-29 | 2019-06-03 | (주)세진티비엠 | 세그멘트 바퀴 및 세그멘트 바퀴가 조립된 대차 |
| KR102015000B1 (ko) | 2019-07-15 | 2019-08-27 | 채승학 | 변형바퀴를 갖는 주행장치 |
| KR20190103852A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 스포크휠 |
| KR20190103851A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 실린더휠 |
| US10525766B2 (en) | 2017-09-22 | 2020-01-07 | Keir P. Daniels | Wheel with adjustable radius and tread firmness |
| KR20200062695A (ko) | 2018-11-27 | 2020-06-04 | 한국기계연구원 | 가변강성 바퀴 및 이의 구동제어방법 |
| KR20200069605A (ko) * | 2018-12-07 | 2020-06-17 | 넥센타이어 주식회사 | 실린더 타이어 |
| WO2020122587A1 (ko) * | 2018-12-11 | 2020-06-18 | 서울대학교산학협력단 | 변형 바퀴 및 이를 구비한 로봇 |
| KR20210035944A (ko) * | 2019-09-24 | 2021-04-02 | 한국타이어앤테크놀로지 주식회사 | 분할조립이 가능하고 유연한 자동차 휠 |
| CN112937650A (zh) * | 2021-01-26 | 2021-06-11 | 江苏远平园林建设有限公司 | 一种便于越过路坑的市政工程用混凝土道路辅助行走装置 |
| KR20210155661A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 아치 메커니즘을 이용한 장애물 극복용 바퀴유닛 및 이를 포함하는 회전 구동모듈 |
| KR20210155662A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 표면장력 메커니즘을 이용한 장애물 극복용 바퀴유닛 |
| KR20220031818A (ko) | 2020-09-04 | 2022-03-14 | 선문대학교 산학협력단 | 가변형 휠 유니트가 구비된 휠체어 로봇 |
| KR20220043864A (ko) | 2020-09-29 | 2022-04-05 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
| WO2022145591A1 (ko) * | 2020-12-30 | 2022-07-07 | (주)필드로 | 단차 주행이 가능한 독립 서스펜션 바퀴장치 및 이를 포함하는 주행장치 |
| KR20220099318A (ko) | 2021-01-06 | 2022-07-13 | 한국기계연구원 | 복합 구조로 형성된 장애물 극복용 바퀴유닛 |
| KR20220101958A (ko) | 2021-01-12 | 2022-07-19 | 한국기계연구원 | 다분절 블록을 포함하는 장애물 극복용 바퀴유닛 |
| KR20230089384A (ko) | 2021-12-13 | 2023-06-20 | 엘지전자 주식회사 | 로봇 |
| KR20240007953A (ko) | 2020-09-29 | 2024-01-17 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
-
2016
- 2016-01-11 KR KR1020160003253A patent/KR20170083854A/ko not_active Application Discontinuation
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180081667A (ko) * | 2017-01-07 | 2018-07-17 | 고인순 | 자전거 바퀴 휠 |
| US10525766B2 (en) | 2017-09-22 | 2020-01-07 | Keir P. Daniels | Wheel with adjustable radius and tread firmness |
| KR101984854B1 (ko) * | 2018-01-29 | 2019-06-03 | (주)세진티비엠 | 세그멘트 바퀴 및 세그멘트 바퀴가 조립된 대차 |
| KR20190103852A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 스포크휠 |
| KR20190103851A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 실린더휠 |
| KR20200062695A (ko) | 2018-11-27 | 2020-06-04 | 한국기계연구원 | 가변강성 바퀴 및 이의 구동제어방법 |
| KR20200069605A (ko) * | 2018-12-07 | 2020-06-17 | 넥센타이어 주식회사 | 실린더 타이어 |
| WO2020122587A1 (ko) * | 2018-12-11 | 2020-06-18 | 서울대학교산학협력단 | 변형 바퀴 및 이를 구비한 로봇 |
| KR102015000B1 (ko) | 2019-07-15 | 2019-08-27 | 채승학 | 변형바퀴를 갖는 주행장치 |
| KR20210035944A (ko) * | 2019-09-24 | 2021-04-02 | 한국타이어앤테크놀로지 주식회사 | 분할조립이 가능하고 유연한 자동차 휠 |
| KR20210155661A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 아치 메커니즘을 이용한 장애물 극복용 바퀴유닛 및 이를 포함하는 회전 구동모듈 |
| KR20210155662A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 표면장력 메커니즘을 이용한 장애물 극복용 바퀴유닛 |
| KR20220031818A (ko) | 2020-09-04 | 2022-03-14 | 선문대학교 산학협력단 | 가변형 휠 유니트가 구비된 휠체어 로봇 |
| KR20220043864A (ko) | 2020-09-29 | 2022-04-05 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
| KR20240007953A (ko) | 2020-09-29 | 2024-01-17 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
| US12060123B2 (en) | 2020-09-29 | 2024-08-13 | Lg Electronics Inc. | Robot |
| WO2022145591A1 (ko) * | 2020-12-30 | 2022-07-07 | (주)필드로 | 단차 주행이 가능한 독립 서스펜션 바퀴장치 및 이를 포함하는 주행장치 |
| KR20220099318A (ko) | 2021-01-06 | 2022-07-13 | 한국기계연구원 | 복합 구조로 형성된 장애물 극복용 바퀴유닛 |
| KR20220101958A (ko) | 2021-01-12 | 2022-07-19 | 한국기계연구원 | 다분절 블록을 포함하는 장애물 극복용 바퀴유닛 |
| CN112937650B (zh) * | 2021-01-26 | 2022-01-04 | 江苏远平园林建设有限公司 | 一种便于越过路坑的市政工程用混凝土道路辅助行走装置 |
| CN112937650A (zh) * | 2021-01-26 | 2021-06-11 | 江苏远平园林建设有限公司 | 一种便于越过路坑的市政工程用混凝土道路辅助行走装置 |
| KR20230089384A (ko) | 2021-12-13 | 2023-06-20 | 엘지전자 주식회사 | 로봇 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170083854A (ko) | 가변형 바퀴가 장착된 이동로봇 | |
| US12005753B2 (en) | System and method for traversing vertical obstacles | |
| US11572117B2 (en) | Obstacle traversing mobile robot | |
| US11052002B2 (en) | Vehicle wheel assembly | |
| EP2205935B1 (en) | A device and a method for checking an attitude of a vehicle | |
| JP2014161991A (ja) | ロボットの移動機構及びそれを備えるロボット | |
| JP6569342B2 (ja) | 移動ロボット | |
| KR20130020107A (ko) | 차륜구동과 4족보행을 동시에 취할 수 있는 하이브리드형 구동 로봇의 주행 알고리듬과 그 로봇. | |
| JP2016024766A (ja) | 案内用ロボット | |
| KR102422354B1 (ko) | 가변형 휠 유니트가 구비된 휠체어 로봇 | |
| JP2009095933A (ja) | 車両の転倒防止装置および脚車輪型ロボット | |
| JP2018039310A (ja) | 旅客搭乗橋 | |
| JP2015083927A (ja) | 案内用ロボット | |
| WO2020090207A1 (ja) | 走行車両 | |
| Imadu et al. | Walking guide interface mechanism and navigation system for the visually impaired | |
| JP2004097712A (ja) | 四足歩行装置 | |
| WO2014141602A1 (ja) | 障害物回避先導ロボット | |
| JP2023112721A (ja) | 移動ロボット、移動ロボットの制振方法、及びプログラム | |
| JP2009055682A (ja) | 倒立型移動体 | |
| JP2017029208A (ja) | 車両 | |
| CN117021049A (zh) | 一种智能导盲协作机器人 | |
| JPH03127918U (ko) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E601 | Decision to refuse application |