KR20170065564A - 전기청소기 - Google Patents
전기청소기 Download PDFInfo
- Publication number
- KR20170065564A KR20170065564A KR1020177010884A KR20177010884A KR20170065564A KR 20170065564 A KR20170065564 A KR 20170065564A KR 1020177010884 A KR1020177010884 A KR 1020177010884A KR 20177010884 A KR20177010884 A KR 20177010884A KR 20170065564 A KR20170065564 A KR 20170065564A
- Authority
- KR
- South Korea
- Prior art keywords
- body case
- main body
- shape
- vacuum cleaner
- electric vacuum
- Prior art date
Links
- 238000004140 cleaning Methods 0.000 claims description 68
- 238000000034 method Methods 0.000 claims description 18
- 238000003384 imaging method Methods 0.000 description 12
- 238000004891 communication Methods 0.000 description 11
- 239000000428 dust Substances 0.000 description 11
- 238000005286 illumination Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000013500 data storage Methods 0.000 description 2
- 238000007790 scraping Methods 0.000 description 2
- 241001270131 Agaricus moelleri Species 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/009—Carrying-vehicles; Arrangements of trollies or wheels; Means for avoiding mechanical obstacles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2852—Elements for displacement of the vacuum cleaner or the accessories therefor, e.g. wheels, casters or nozzles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0242—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using non-visible light signals, e.g. IR or UV signals
-
- G05D2201/0215—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single 2D image sensor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two 2D image sensors having a relative position equal to or related to the interocular distance
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- Signal Processing (AREA)
- Acoustics & Sound (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Electric Suction Cleaners (AREA)
Abstract
물체의 형상을 정밀도 좋게 검출할 수 있는 전기청소기를 제공한다. 전기청소기(11)는 본체 케이스, 구동륜, 제어수단(27), 복수의 카메라(51a, 51b), 화상 생성부(62) 및 형상 취득부(63)를 갖는다. 구동륜은 본체 케이스를 주행 가능하게 한다. 제어수단(27)은 구동륜의 구동을 제어함으로써 본체 케이스를 자율 주행시킨다. 카메라(51a, 51b)는 본체 케이스에 배치되어 서로 이격되고, 본체 케이스의 주행방향측을 촬상한다. 화상 생성부(62)는 카메라(51a, 51b)에 의해 촬상한 화상에 의해, 주행방향측에 위치하는 물체의 거리 화상을 생성한다. 형상 취득부(63)는 화상 생성부(62)에서 생성한 거리 화상으로부터, 촬상된 물체의 형상정보를 취득한다.
Description
본 발명의 실시형태는 본체 케이스의 주행방향측을 촬상하는 복수의 촬상수단을 구비한 전기청소기에 관한 것이다.
종래, 피청소면으로서의 바닥면 위를 자율 주행하면서 바닥면을 청소하는, 소위 자율주행형의 전기청소기(청소로봇)가 알려져 있다.
이와 같은 전기청소기는 주행시에 장애물을 피하지 않으면 안된다. 그 때문에, 주행에 지장을 초래하는 장애물의 검출용으로서, 초음파 센서나 자외선 센서 등의 센서를 사용하고 있다. 그러나, 이들 센서를 사용한 경우, 장애물의 유무를 검출할 수는 있어도, 그 장애물의 크기나 형상 등을 검출하는 것은 용이하지 않다.
이와 같은 자율주행형의 전기청소기에서는 장애물의 크기나 형상을 검출할 수 없는 경우, 본래 주행할 수 있을 부분도 피하면서 주행하게 되므로, 청소할 수 있는 영역이 한정되어 청소가 순조롭지 않게 된다.
따라서, 자율주행형의 전기청소기에서 청소를 보다 원활하게 하기 위해, 장애물의 형상을 검출하는 것이 요망되고 있다.
본 발명이 해결하고자 하는 과제는 물체의 형상을 정밀도 좋게 검출할 수 있는 전기청소기를 제공하는 것이다.
실시형태의 전기청소기는 본체 케이스, 구동륜, 제어수단, 복수의 촬상수단, 거리 화상 생성수단, 및 형상취득수단을 갖는다. 구동륜은 본체 케이스를 주행 가능하게 한다. 제어수단은 구동륜의 구동을 제어함으로써 본체 케이스를 자율 주행시킨다. 촬상수단은 본체 케이스에 배치되어 서로 이격되고, 본체 케이스의 주행방향측을 촬상한다. 거리 화상 생성수단은 촬상수단에 의해 촬상된 화상에 의해, 주행방향측에 위치하는 물체의 거리 화상을 형성한다. 형상취득수단은 거리 화상 생성수단에서 생성한 거리 화상으로부터 촬상된 물체의 형상정보를 취득한다.
도 1은 일 실시형태의 전기청소기의 내부 구조를 도시한 블럭도이다.
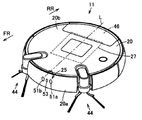
도 2는 상기 전기청소기를 도시한 사시도이다.
도 3은 상기 전기청소기를 하방으로부터 도시한 평면도이다.
도 4는 상기 전기청소기를 포함하는 전기 청소 시스템을 모식적으로 도시한 설명도이다.
도 5는 상기 전기청소기의 물체의 거리의 계산방법을 모식적으로 도시한 설명도이다.
도 6의 (a)는 한쪽의 촬상수단에 의해 촬상된 화상의 일례를 도시한 설명도, (b)는 다른쪽 촬상수단에 의해 촬상된 화상의 일례를 도시한 설명도, (c)는 (a) 및 (b)에 기초하여 생성한 거리 화상의 일례를 도시한 설명도이다.
도 7은 상기 촬상수단에 의해 촬상되는 물체의 일례를 모식적으로 도시한 사시도이다.
도 8은 상기 전기청소기의 주행제어를 도시한 플로우차트이다.
도 9는 상기 전기청소기의 주행제어를 (a) 내지 (c)에 도시한 설명도이다.
도 2는 상기 전기청소기를 도시한 사시도이다.
도 3은 상기 전기청소기를 하방으로부터 도시한 평면도이다.
도 4는 상기 전기청소기를 포함하는 전기 청소 시스템을 모식적으로 도시한 설명도이다.
도 5는 상기 전기청소기의 물체의 거리의 계산방법을 모식적으로 도시한 설명도이다.
도 6의 (a)는 한쪽의 촬상수단에 의해 촬상된 화상의 일례를 도시한 설명도, (b)는 다른쪽 촬상수단에 의해 촬상된 화상의 일례를 도시한 설명도, (c)는 (a) 및 (b)에 기초하여 생성한 거리 화상의 일례를 도시한 설명도이다.
도 7은 상기 촬상수단에 의해 촬상되는 물체의 일례를 모식적으로 도시한 사시도이다.
도 8은 상기 전기청소기의 주행제어를 도시한 플로우차트이다.
도 9는 상기 전기청소기의 주행제어를 (a) 내지 (c)에 도시한 설명도이다.
(실시형태)
이하, 일 실시형태의 구성을 도면을 참조하여 설명한다.
도 1 내지 도 4에서, "11"은 전기청소기이고, 이 전기청소기(11)는 이 전기청소기(11)의 충전용 기지부가 되는 기지장치로서의 충전장치(충전대)(12)(도 4)와 함께 전기청소장치(전기 청소 시스템)을 구성하는 것이다. 그리고, 전기청소기(11)는 본 실시형태에서 주행면으로서의 피청소면인 바닥면상을 자율 주행(자주)하면서 바닥면을 청소하는, 소위 자주식 로봇클리너(청소 로봇)이고, 예를 들어 청소영역내 등에 배치된 중계수단(중계부)로서의 홈게이트웨이(루터)(14)와의 사이에서 유선통신 또는 Wi-Fi(등록상표)나 Bluetooth(등록상표) 등의 무선통신을 사용하여 통신(송수신)함으로써, 인터넷 등의 (외부)네트워크(15)를 통하여, 데이터 저장수단(데이터 저장부)로서의 범용의 서버(16)나, 표시수단(표시부)인 범용의 외부장치(17) 등과 유선 또는 무선통신 가능하게 되어 있다.
또한, 이 전기청소기(11)는 중공 형상의 본체 케이스(20)와, 이 본체 케이스(20)를 바닥면상에서 주행시키는 주행부(21)와, 바닥면 등의 먼지를 청소하는 청소부(22)와, 충전장치(12)를 포함하는 외부장치와 통신하는 통신부(23)와, 화상을 촬상하는 촬상부(25)와, 센서부(26)와, 주행부(21), 청소부(22), 통신부(23), 및 촬상부(25) 등을 제어하는 컨트롤러인 제어수단(제어부)(27)과, 이들 주행부(21), 청소부(22), 통신부(23), 촬상부(25), 센서부(26) 및 제어수단(27) 등에 급전하는 2차 전지(28)를 구비하고 있다. 또한, 이하, 전기청소기(11)(본체 케이스(20))의 주행방향을 따른 방향을 전후방향(도 2에 도시한 화살표 FR, RR방향)으로 하고, 이 전후방향에 대하여 교차(직교)하는 좌우방향(양측 방향)을 폭 방향으로서 설명한다.
본체 케이스(20)는 예를 들어 합성수지 등에 의해 편평한 원기둥 형상(원반 형상) 등으로 형성되어 있다. 즉, 이 본체 케이스(20)는 측면부(20a)와, 이 측면부(20a)의 상부 및 하부에 각각 연속하는 상면부(20b)(도 2) 및 하면부(20c)(도 3)을 구비하고 있다. 이 본체 케이스(20)의 측면부(20a)는 대략 원통면 형상으로 형성되어 있고, 이 측면부(20a)에는 예를 들어 촬상부(25) 등이 배치되어 있다. 또한, 본체 케이스(20)의 상면부(20b) 및 하면부(20c)는 각각 대략 원 형상으로 형성되어 있고, 도 3에 도시한 바와 같이, 바닥면에 대향하는 하면부(20c)에는 집진구인 흡입구(31) 및 배기구(32) 등이 각각 개구되어 있다.
주행부(21)는 복수(한쌍)의 구동부로서의 구동륜(34,34), 이들 구동륜(34, 34)을 구동시키는 동작부로서의 구동수단인 모터(35, 35)(도 1), 및 선회용 선회륜(36) 등을 구비하고 있다.
각 구동륜(34)은 전기청소기(11)(본체 케이스(20))를 바닥면상에서 전진방향 및 후퇴방향으로 주행(자율주행)시키는, 즉 주행용의 것이고, 좌우 폭방향을 따라서 도시하지 않은 회전축을 갖고, 폭방향에 대칭으로 배치되어 있다.
각 모터(35)(도 1)는 예를 들어 구동륜(34)의 각각에 대응하여 배치되어 있고, 각 구동륜(34)을 독립하여 구동시키는 것이 가능해져 있다.
선회륜(36)은 본체 케이스(20)의 하면부(20c)의 폭방향의 대략 중앙부 앞쪽에 위치하고 있으며, 바닥면을 따라서 선회 가능한 종동륜이다.
청소부(22)는 예를 들어 본체 케이스(20) 내에 위치하여 먼지를 흡입구(31)로부터 공기와 함께 흡입하여 배기구(32)로부터 배기하는 전동송풍기(41), 흡입구(31)에 회전 가능하게 부착되어 먼지를 긁어 올리는 회전 청소체로서의 회전 브러시(42) 및 이 회전 브러시(42)를 회전 구동시키는 브러시 모터(43)(도 1), 본체 케이스(20)의 전측 등의 양측에 회전 가능하게 부착되어 먼지를 긁어 모으는 선회 청소부로서의 보조 청소 수단(보조 청소부)인 사이드 브러시(44) 및 이 사이드 브러시(44)를 구동시키는 사이드 브러시 모터(45)(도 1), 및 흡입구(31)와 연통하여 먼지를 모으는 집진부(46)(도 2) 등을 구비하고 있다. 또한, 전동송풍기(41)와, 회전 브러시(42) 및 브러시 모터(43)(도 1)와, 사이드 브러시(44) 및 사이드 브러시 모터(45)(도 1)는 적어도 어느 것을 구비하고 있으면 좋다.
도 1에 도시한 통신부(23)는 홈게이트웨이(14) 및 네트워크(15)를 통하여 외부장치(17)와 무선통신을 하기 위한 무선통신수단(무선통신부) 및 청소기 신호 수신수단(청소기 신호 수신부)으로서의 무선 LAN 디바이스(47), 충전장치(12)(도 4) 등으로 무선신호(적외선 신호)를 송신하는 예를 들어 적외선 발광소자 등의 도시하지 않는 송신수단(송신부), 및 충전장치(12)나 도시하지 않는 리모컨 등으로부터의 무선신호(적외선 신호)를 수신하는 예를 들어 포토트랜지스터 등의 도시하지 않는 수신수단(수신부) 등을 구비하고 있다. 또한, 예를 들어, 통신부(23)에 액세스 포인트 기능을 탑재하고, 홈게이트웨이(14)를 통하지 않고 외부장치(17)와 직접 무선통신을 하도록 해도 좋다. 또한, 예를 들어 통신부(23)에 웹서버 기능을 부가해도 좋다.
무선 LAN 디바이스(47)는 전기청소기(11)로부터 홈게이트웨이(14)를 통하여 네트워크(15)에 대해서 각종 정보를 송수신하는 것이다.
촬상부(25)는 복수, 예를 들어 한쪽 및 다른쪽 촬상수단(촬상부 본체)으로서의 카메라(51a, 51b) 및 이들 카메라(51a, 51b)에 조명을 부여하는 조명수단(조명부)으로서의 LED 등의 램프(53)를 구비하고 있다.
도 2에 도시한 바와 같이, 카메라(51a, 51b)는 본체 케이스(20)의 측면부(20a)에서 전부의 양측에 배치되어 있다. 즉, 본 실시형태에서는 카메라(51a, 51b)는 본체 케이스(20)의 측면부(20a)에서 전기청소기(11)(본체 케이스(20))의 폭 방향의 중심선(L)에 대하여, 좌우 방향으로 거의 동등한 소정 각도(예각) 경사진 위치에 각각 배치되어 있다. 다시 말하면, 이들 카메라(51a, 51b)는 본체 케이스(20)에 대하여 폭 방향으로 거의 대칭으로 배치되어 있고, 이들 카메라(51a, 51b)의 중심위치가, 전기청소기(11)(본체 케이스(20))의 주행방항인 전후방향과 교차(직교)하는 폭방향의 중심위치와 거의 일치하고 있다. 또한, 이들 카메라(51a, 51b)는 상하 방향으로 거의 동등한 위치, 즉 거의 동등한 높이 위치에 각각 배치되어 있다. 이 때문에, 이들 카메라(51a, 51b)는 전기청소기(11)를 바닥면상에 얹은 상태에서 이 바닥면으로부터의 높이가 서로 거의 동등하게 설정되어 있다. 따라서, 카메라(51a, 51b)는 서로 어긋난 위치(좌우방향으로 어긋난 위치)에 이격되어 배치되어 있다. 또한, 이들 카메라(51a, 51b)는 본체 케이스(20)의 주행방향인 전방을, 각각 소정의 수평화각(예를 들어, 105°등)으로 디지털 화상을 소정 시간마다, 예를 들어 수십밀리초 마다 등의 미소 시간마다, 또는 수초마다 등에 촬상하는 디지털 카메라이다. 또한, 이들 카메라(51a, 51b)는 서로의 촬상범위(시야)(Va, Vb)가 겹쳐 있고(도 5), 이들 카메라(51a, 51b)에 의해 촬상되는(한 쪽 및 다른 쪽의) 화상(P1, P2)(도 6(a) 및 도 6(b))은 그 촬상영역이 전기청소기(11)(본체 케이스(20))의 폭방향의 중심선(L)을 연장한 전방의 위치를 포함하는 영역에서 좌우 방향으로 겹쳐져 있다. 본 실시형태에서는 이들 카메라(51a, 51b)는 예를 들어 가시광 영역의 화상을 촬상하는 것으로 한다. 또한, 이들 카메라(51a, 51b)에 의해 촬상한 화상은, 예를 들어 도시하지 않은 화상처리회로 등에 의해 소정의 데이터 형식으로 압축할 수도 있다.
램프(53)는 카메라(51a, 51b)에 의해 화상을 촬상할 때의 조명용 광을 출력하는 것으로, 카메라(51a, 51b)의 중간위치, 즉 본체 케이스(20)의 측면부(20a)의 중심선(L)상의 위치에 배치되어 있다. 즉, 램프(53)는 카메라(51a, 51b)로부터의 거리가 거의 동등해져 있다. 또한, 이 램프(53)는 카메라(51a, 51b)와 상하 방향으로 거의 동등한 위치, 즉 거의 동등한 높이 위치에 배치되어 있다. 따라서, 이 램프(53)는 카메라(51a, 51b)의 폭 방향의 거의 중앙부에 배치되어 있다. 본 실시형태에서는 이 램프(53)는 가시광 영역을 포함하는 광을 조명하도록 이루어져 있다.
도 1에 도시한 센서부(26)는 예를 들어 각 구동륜(34)(각 모터(35))의 회전수를 검출하는 광 엔코더 등의 회전수 센서(55)를 구비하고 있다. 이 회전수 센서(55)는 측정한 구동륜(34)(도 3) 또는 모터(35)의 회전수에 의해, 전기청소기(11)(본체 케이스(20)(도 3))의 선회각도나 진행거리를 검출하도록 이루어져 있다. 따라서, 이 회전수 센서(55)는 예를 들어 충전장치(12)(도 4) 등의 기준위치로부터의 전기청소기(11)(본체 케이스(20)(도 3))의 상대위치를 검출하는, 위치검출센서이다.
제어수단(27)은 예를 들어 제어수단 본체(제어부 본체)인 CPU, 이 CPU에 의해 판독되는 프로그램 등의 고정적인 데이터를 저장한 저장부인 ROM, 프로그램에 의한 데이터 처리의 작업영역이 되는 작업영역 등의 각종 메모리 영역을 동적으로 형성하는 영역 저장부인 RAM(각각 도시하지 않음) 등을 구비하는 마이크로컴퓨터이다. 이 제어수단(27)은 또한 예를 들어 카메라(51a, 51b)에서 촬상한 화상의 데이터 등을 기억하는 기억수단(기억부)로서의 메모리(61), 카메라(51a, 51b)에서 촬상한 화상에 기초하여 카메라(51a, 51b)로부터의 물체(특징점)의 거리(심도)를 계산하고, 이 계산한 물체의 거리에 기초하여 거리 화상을 생성하는 거리 화상 생성수단(거리 화상 생성부)으로서의 화상 생성부(62), 이 화상 생성부(62)에 의해 생성한 거리 화상 중에 촬상된 물체의 형상을 취득하는 형상취득수단으로서의 형상 취득부(63), 이 형상 취득부(63)에 의해 취득한 물체의 형상에 따라서 제어를 판정하는 판정수단으로서의 판정부(64), 및 판정부(64)에 의한 장애물 판정에 기초하여 청소영역의 맵을 생성하는 맵 생성수단(맵 생성부)으로서의 화상처리부(65) 등을 구비하고 있다. 또한, 이 제어수단(27)은 주행부(21)의 모터(35, 35)(구동륜(34, 34(도 3))의 동작을 제어하는 주행제어부(66), 청소부(22)의 전동송풍기(41), 브러시 모터(43) 및 사이드 브러시 모터(45)의 동작을 제어하는 청소 제어부(67), 촬상부(25)의 카메라(51a, 51b)를 제어하는 촬상 제어부(68), 및 촬상부(25)의 램프(53)를 제어하는 조명 제어부(69) 등을 구비하고 있다. 그리고, 이 제어수단(27)은 예를 들어 구동륜(34, 34)(도 3) 즉 모터(35, 35)를 구동하여 전기청소기(11)(본체 케이스(20)(도 3))를 자율 주행시키는 주행모드와, 충전장치(12)(도 4)를 통하여 2차 전지(28)를 충전하는 충전모드와, 동작대기중의 대기모드를 구비하고 있다.
메모리(61)는 전기청소기(11)의 전원의 온오프에 관계없이 기억한 각종 데이터를 유지하는, 예를 들어 플래시메모리 등의 불휘발성의 메모리이다.
화상 생성부(62)는 이미 알려진 방법을 사용하여 카메라(51a, 51b)에 의해 촬상한 화상과, 카메라(51a, 51b)간의 거리에 기초하여 물체(특징점)의 거리를 계산하고, 또한 이 계산한 물체(특징점)의 거리를 나타내는 거리 화상을 생성한다. 즉, 이 화상 생성부(62)는 예를 들어 카메라(51a, 51b)와 물체(특징점)(O)의 거리, 및 카메라(51a, 51b)간의 거리에 기초하는 삼각 측량을 응용하고(도 5), 카메라(51a, 51b)에 의해 촬상한 각 화상중으로부터 동일 위치를 나타내는 화소 도트를 검출하고, 이 화소도트의 상하방향 및 좌우방향의 각도를 계산하여, 이들 각도와 카메라(51a, 51b)간의 거리로부터 그 위치의 카메라(51a, 51b)로부터의 거리를 계산한다. 따라서, 카메라(51a, 51b)에 의해 촬상하는 화상은, 가능한 범위가 겹쳐(랩되어) 있는 것이 바람직하다. 또한, 이 화상 생성부(62)에 의한 거리 화상의 생성은 계산한 각 화소도트의 거리를, 예를 들어 1도트마다 등의 소정 도트마다 명도, 또는 색조 등의, 시인에 의해 식별 가능한 계조로 변색하여 표시함으로써 실시된다. 본 실시형태에서 화상 생성부(62)는 거리가 클수록 명도가 작은 흑백의 화상, 즉 전기청소기(11)(본체 케이스(20))로부터의 전방으로의 거리가 멀수록 검고 거리가 가까울수록 흰, 예를 들어 256계조(8비트=28)의 그레이 스케일의 화상으로서 거리 화상을 생성한다. 따라서, 이 거리 화상은 이른바 전기청소기(11)(본체 케이스(20))의 주행방향 전방의 카메라(51a, 51b)에 의해 촬상되는 범위내에 위치하는 물체의 거리정보(거리 데이터)의 집합체를 가시화한 것이다. 또한, 이 화상 생성부(62)는 카메라(51a, 51b)에 의해 촬상된 각 화상 중의 소정의 화상범위 내의 화소도트에 대해서만 거리 화상을 생성해도 좋고, 화상 전체의 거리 화상을 생성해도 좋다. 이 화상범위는 예를 들어 전기청소기(11)(본체 케이스(20))의 주행속도 등의 조건에 따라서 변화시켜도 좋지만, 적어도 카메라(51a, 51b)로부터 소정의 거리(D), 또는 소정의 거리범위 DR(도 5)내의 소정 위치(예를 들어 거리범위 DR(도 5)) 중 가장 가까운 위치)에 전기청소기(11)(본체 케이스(20))가 위치하는 경우의, 이 전기청소기(11)(본체 케이스(20))의 외형형상(상하 좌우의 크기) 이상으로 하는 것이 바람직하다.
형상 취득부(63)는 화상 생성부(62)에 의해 생성된 거리 화상에 대해서, 소정의 거리(D), 또는 소정의 거리범위(DR)를 설정함으로써, 이 거리(D), 또는 거리범위(DR)에 위치하는 물체(O)의 형상 정보를 취득하는 것이다(도 5). 구체적으로, 이 형상 취득부(63)는 거리 화상 중의 일례로서, 거리 화상(PL)에 촬상된 예를 들어 빈 캔 등의 물체(O)에 대해서, 소정의 거리(D), 또는 거리범위(DR)(도 5)에서의 화소도트의 거리를 검출함으로써, 물체(O)의 수평방향의 치수 즉 폭 치수(W) 및 상하방향의 치수 즉 높이치수(H)를 검출할 수 있다(도 6(c)). 이 소정의 거리(D), 또는 소정의 거리범위(DR)(도 5)는, 예를 들어 전기청소기(11)(본체 케이스(20))의 주행속도 등에 대응하여 설정되어 있다. 이 소정의 거리(D), 또는 소정의 거리범위(DR)(도 5)는 예를 들어 전기청소기(11)(본체 케이스(20))의 주행속도 등에 대응하여 가변 설정되도록 해도 좋다. 또한, 이 형상 취득부(63)는 물체의 형상정보(폭 치수 및 높이 치수)를 취득함으로써, 그 물체가 존재하지 않는 공간이나 구멍부의 형상정보(폭 치수 및 높이 치수) 등도 간접적으로 취득할 수 있다. 예를 들어, 도 7에 도시한 바와 같은 베드 등의 물체(O)의 형상정보를 취득함으로써, 천판부인 풋보드부(FB)와 바닥면(F)의 상하방향의 간격(G1), 및 풋보드부(FB)로부터 서로 이격되어 바닥면(F)을 향하여 돌출되는 다리부(LP)의 수평방향의 간격(G2)을 간접적으로 취득할 수 있으므로, 이들 다리부(LP, LP) 사이로 구획되는 좁은 장소(구멍부)(NS)가 위치하고 있는지 여부, 및 이 좁은 장소(NS)의 형상정보(폭 치수 및 높이 치수)를 취득할 수 있다.
판정부(64)는 형상 취득부(63)에 의해 취득한 소정의 거리, 또는 소정의 거리범위의 물체의 형상정보, 및 물체간에 위치하는 좁은 장소 등의 형상정보에 기초하여, 물체가 주행의 방해가 되는 장애물인지의 여부, 또는 물체가 타고 올라가는 것이 가능한 것인지의 여부 등을 판정하고, 또한 전기청소기(11)(본체 케이스(20))의 주행제어의 변경의 여부를 판정한다. 이 판정부(64)는 또한 형상 취득부(63)에 의해 취득한 소정의 거리, 또는 소정의 거리범위의 물체의 형상정보, 및 물체간에 위치하는 좁은 장소 등의 형상정보에 기초하여, 청소제어의 변경의 여부를 판정해도 좋다. 이들 판정의 상세한 내용을 후술한다.
화상처리부(65)는 형상 취득부(63)에 의해 취득한 물체의 형상정보와, 센서부(26)의 회전수 센서(55)에 의해 검출한 전기청소기(11)(본체 케이스(20))의 위치로부터 전기청소기(11)(본체 케이스(20))가 배치된 청소영역 및 이 청소영역 내에 위치하는 물체 등의 위치관계를 계산하여 맵을 생성한다. 또한, 화상처리부(65)는 필수의 구성은 아니다.
주행제어부(66)는 모터(35, 35)에 흐르는 전류의 크기 및 방향을 제어함으로써 모터(35, 35)를 정회전, 또는 역회전시킴으로써 모터(35, 35)의 구동을 제어하고, 이들 모터(35, 35)의 구동을 제어함으로써 구동륜(34, 34)(도 3)의 구동을 제어하고 있다. 또한, 이 주행 제어부(66)는 판정부(64)의 판정에 따라서, 전기청소기(11)(본체 케이스(20))의 주행방향 및/또는 주행속도를 제어하도록 구성되어 있다.
청소 제어부(67)는 전동송풍기(41), 브러시 모터(43), 및 사이드 브러시 모터(45)를 각각 별개로 도통각 제어함으로써, 이들 전동송풍기(41), 브러시 모터(43)(회전 브러시(42)(도 3)), 및 사이드 브러시 모터(45)(사이드 브러시(44)(도 3))의 구동을 제어하고 있다. 또한, 이 청소 제어부(67)는 판정부(64)의 판정에 따라서, 청소부(22)의 동작을 제어하도록 구성되어 있다. 또한, 이들 전동송풍기(41), 브러시 모터(43), 및 사이드 브러시 모터(45)의 각각에 대응하여 제어부를 별개로 설치해도 좋다.
촬상 제어부(68)는 카메라(51a, 51b)의 셔터의 동작을 제어하는 제어회로를 구비하고, 이 셔터를 소정 시간마다 동작시킴으로써 소정 시간마다 카메라(51a, 51b)에 의해 화상을 촬상시키도록 제어한다.
조명 제어부(69)는 스위치 등을 통하여 램프(53)의 온오프를 제어하고 있다. 이 조명 제어부(69)는 본 실시형태에서는 전기청소기(11)의 주위의 밝기를 검출하는 센서를 구비하고 있고, 이 센서에 의해 검출한 밝기가 소정 이하인 경우에 램프(53)를 점등시키고, 그 밖일 때에는 램프(53)를 점등시키지 않도록 하는 것이다.
또한, 2차 전지(28)는 예를 들어 도 3에 도시한 본체 케이스(20)의 하면부(20c)의 후부의 양측에 노출되는 접속부로서의 충전단자(71, 71)와 전기적으로 접속되어 있고, 이들 충전단자(71, 71)가 충전장치(12)(도 4)측과 전기적 및 기계적으로 접속됨으로써, 이 충전장치(12)(도 4)를 통하여 충전되도록 이루어져 있다.
도 1에 도시한 홈게이트웨이(14)는 액세스 포인트 등이라고도 불리고, 건물 내에 설치되고, 네트워크(15)에 대해서 예를 들어 유선에 의해 접속되어 있다.
서버(16)는 네트워크(15)에 접속된 컴퓨터(클라우드 서버)이고, 각종 데이터를 보존 가능하다.
외부장치(17)는 건물의 내부에서는 예를 들어 홈게이트웨이(14)를 통하여 네트워크(15)에 대하여 유선 또는 무선 통신 가능하고, 건물의 외부에서는 네트워크(15)에 대하여 유선 또는 무선 통신 가능한, 예를 들어 PC(태블릿 단말(태블릿 PC))(17a)나 스마트폰(휴대전화)(17b) 등의 범용의 디바이스이다. 이 외부장치(17)는 적어도 화상을 표시하는 표시기능을 갖고 있다.
다음에, 상기 일 실시형태의 동작을 설명한다.
일반적으로 전기청소장치는 전기청소기(11)에 의해 청소를 하는 청소작업과, 충전장치(12)에 의해 2차 전지(28)를 충전하는 충전작업으로 크게 나뉘어진다. 충전작업은 충전장치(12)에 내장된 정전류 회로 등의 충전회로를 사용하는 이미 알려진 방법이 사용되므로, 청소작업에 대해서만 설명한다. 또한, 외주장치(17) 등으로부터의 지령에 따라서 카메라(51a, 51b) 중 적어도 어느 것에 의해 소정의 대상물을 촬상하는 촬상작업을 별도로 구비하고 있어도 좋다.
전기청소기(11)는 예를 들어 미리 설정된 청소 개시 시각이 되었을 때나, 리모컨 또는 외부장치(17)에 의해 송신된 청소 개시의 지령신호를 수신했을 때 등의 타이밍으로 제어수단(27)이 대기모드로부터 주행모드로 전환되고, 이 제어수단(27)(주행제어부(66))이 모터(35, 35)(구동륜(34, 34))를 구동시켜 충전장치(12)로부터 소정 거리 이탈한다.
이어서, 전기청소기(11)는 화상처리부(65)에 의해, 청소영역의 맵을 생성한다. 이 맵의 생성시에는 개략적으로 전기청소기(11)는 청소영역의 외벽 등을 따라서 주행하거나, 그 위치에서 선회하면서, 카메라(51a, 51b)에 의해 촬상한 화상 중의 물체의 거리를 계산하고, 이 거리로부터 벽이나 장애물을 판정하여, 현재의 전기청소기(11)의 위치에 기초하여 맵을 생성한다(맵 생성 모드). 그리고, 제어수단(27)이 청소영역 전체를 맵핑했다고 판정한 경우에는, 맵 생성 모드를 종료하고, 후술하는 청소모드로 이행한다. 또한, 이 맵은 생성시에 예를 들어 메모리(61) 등에 일단 기억해 두면, 다음회의 청소 이후는 메모리(61)로부터 읽어내는 것만으로도 좋고, 청소시 마다 생성할 필요는 없지만, 메모리(61)에 기억하고 있는 맵과 다른 청소영역을 청소하는 경우나, 동일한 청소영역이어도 물체의 레이아웃 등이 변화되고 있는 경우도 있으므로, 예를 들어 사용자의 지령 등에 따라서, 또는 소정 기간마다 등에 적절하게 생성할 수 있도록 해도 좋고, 일단 생성한 맵을, 청소작업시의 물체의 거리측정에 기초하여 수시로 갱신해도 좋다.
이어서, 전기청소기(11)는 생성한 맵에 기초하여 청소영역 내를 자율 주행하면서 청소를 한다(청소모드). 이 자율주행시에는 개략적으로, 전기청소기(11)는 전진하면서 카메라(51a, 51b)에 의해 촬상한 화상 중의 물체의 거리를 계산하고, 이 거리나 매핑한 맵에 기초하여 벽이나 장애물을 판정하고, 이들 벽이나 장애물을 회피하여 주행하면서, 청소부(22)에 의해 청소를 실시한다.
보다 상세하게는 도 8에 도시한 플로우차트 등도 참조하면서 설명하면, 우선 제어수단(27)(주행 제어부(66))에 의해 모터(35, 35)(구동륜(34,34))을 구동시켜 전기청소기(11)(본체 케이스(20))를 주행시키고(단계 1), 제어수단(27)(촬상 제어부(68))에 의해 구동시킨 카메라(51a, 51b)에 의해 주행방향 전방을 촬상한다(단계 2). 이들 촬상한 화상 중 적어도 어느 것은, 메모리(61)에 기억할 수 있다. 다음에, 이들 카메라(51a, 51b)에 의해 촬상한 화상과, 카메라(51a, 51b)와의 사이의 거리에 기초하여, 화상 생성부(62)에 의해 소정의 화상범위내의 물체(특징점)의 거리를 계산한다(단계 3). 구체적으로, 예를 들어 카메라(51a, 51b)에 의해 도 6(a) 및 도 6(b)에 도시한 바와 같은 화상(P1, P2)을 촬상한 경우, 그 화상(P1, P2) 중의 각 화소도트의 거리를 화상 생성부(62)에 의해 계산한다. 또한, 화상 생성부(62)는 계산한 거리에 기초하여 거리 화상을 생성한다(단계 4). 이 거리 화상도, 예를 들어 메모리(61)에 기억할 수 있다. 이 화상 생성부(62)에 의해 생성한 거리 화상(PL)의 예를 도 6(c)에 도시한다. 그리고, 이 생성한 거리 화상으로부터, 형상 취득부(63)가 소정의 거리, 또는 소정의 거리범위의 물체의 형상 정보를 취득한다(단계 5). 이 때, 물체의 형상정보로서 폭 치수, 높이 치수 등을 검출함으로써 좁은 장소의 형상정보 등도 취득할 수 있다.
그리고, 판정부(64)가, 형상 취득부(63)에 의해 취득한 물체의 형상 정보에 기초하여, 전기청소기(11)(본체 케이스(20))의 전방의 소정의 거리, 또는 소정의 거리범위내에 물체가 있는지의 여부를 판정한다(단계 6). 구체적으로 판정부(64)는 형상 취득부(63)에 의해 취득한 물체의 폭 치수 및 높이 치수, 물체간의 수평방향 또는 상하방향의 간격에 기초하여, 거리 화상의 소정의 화상범위내에 물체 중 적어도 일부가 위치하고 있는지 여부를 판정한다. 이 화상범위는 카메라(51a, 51b)로부터 소정의 거리(D), 또는 소정의 거리범위(DR) 내의 소정 위치(예를 들어, 거리범위(DR) 중 가장 가까운 위치)에 전기청소기(11)(본체 케이스(20))가 위치하는 경우의, 이 전기청소기(11)(본체 케이스(20))의 외형 형상(상하 좌우의 크기)에 대응한다. 따라서, 이 화상범위내에서 소정의 거리, 또는 소정의 거리범위내에 장애물이 위치하는 것은, 전기청소기(11)(본체 케이스(20))가 이대로 전진했을 때 전기청소기(11)(본체 케이스(20))의 궤적내에 물체가 위치하는 것을 의미한다.
이 단계(6)에서 물체가 없다고 판정한 경우, 전기청소기(11)(본체 케이스(20))의 전방에 주행 가능한 공간이 있는 것으로 상정되므로, 판정부(64)는 형상 취득부(63)에 의해 취득한 물체의 형상정보에 기초하여, 이 공간이 큰지의 여부, 즉 전기청소기(11)(본체 케이스(20))의 전방에 좁은 장소가 있는지의 여부를 판정한다(단계 7)). 구체적으로, 판정부(64)는 형상 취득부(63)에 의해 취득한 물체간의 수평방향의 간격 및 물체간의 상하방향의 간격이 각각 소정의 범위 내일 때, 좁은 장소가 위치하고 있다고 판정한다. 보다 상세하게 판정부(64)는 형상 취득부(63)에 의해 취득한 물체간의 수평방향 및 상하방향의 각각의 간격과, 전기청소기(11)(본체 케이스(20))의 폭 치수 및 높이 치수와의 차이 중 적어도 어느 것인가가 소정값 미만일 때, 좁은 장소가 위치하고 있다고 판정한다. 그리고, 제어수단(27)(주행제어부(66))은 이 판정에 따라서, 전기청소기(11)(본체 케이스(20))의 주행속도를 제어한다.
구체적으로, 단계 7에서 전기청소기(11)(본체 케이스(20))의 전방에 좁은 장소가 없다(상기의 차가 각각 소정값 미만이 아니라고(소정값 이상이라고)) 판정한 경우에는, 전기청소기(11)(본체 케이스(20))의 전방에 충분한 공간이 있거나, 또는 전기청소기(11)(본체 케이스(20))의 전방에 물체가 없다고 상정되므로, 전기청소기(11)(본체 케이스(20))의 주행속도를 상대적으로 고속의 제1 속도로 설정하고(단계 8), 단계 1로 되돌아간다. 이 단계 8의 주행제어로서는 제어수단(27)(주행 제어부(66))가, 전기청소기(11)(본체 케이스(20))의 주행속도가 제1 속도가 되도록 모터(35, 35)(구동륜(34, 34))의 구동을 제어한다. 따라서, 전기청소기(11)(본체 케이스(20))가 이미 제1 속도로 주행하고 있는 경우에는, 주행속도를 변경하지 않고 단계 1로 되돌아간다.
또한, 단계 7에서 전기청소기(11)(본체 케이스(20))의 전방에 좁은 장소가 있다고(상기의 차 중 적어도 어느 것이 소정값 미만이라고) 판정한 경우에는, 전기청소기(11)(본체 케이스(20))의 전방의 좁은 장소에 전기청소기(11)(본체 케이스(20))가 들어가는 것으로 상정되므로, 전기청소기(11)(본체 케이스(20))의 주행속도를 상대적으로 저속의 제2 속도로 설정하고(단계 9), 단계 1로 되돌아간다. 이 단계 9의 주행제어로서는 제어수단(27)(주행 제어부(66))이, 전기청소기(11)(본체 케이스(20)의 주행속도가 제2 속도가 되도록 모터(35, 35)(구동륜(34, 34))의 구동을 제어함으로써, 전기청소기(11)(본체 케이스(20))의 외형에 대하여 여유가 적은, 빠듯한 형상인 좁은 장소에, 이 좁은 장소를 둘러싸는 물체와 충돌하지 않도록 신중하게 주행하면서 확실하게 들어가도록 한다. 따라서, 전기청소기(11)(본체 케이스(20))가 이미 제2 속도로 주행하고 있는 경우에는, 주행속도를 변경하지 않고 단계 1로 되돌아간다.
한편, 단계 6에서 물체가 있다고 판정한 경우, 전기청소기(11)(본체 케이스(20)의 전방의 물체가 주행의 방해가 되는 장애물인 경우와, 주행의 방해가 되지 않는 물체인 경우가 상정되므로, 판정부(64)는 형상 취득부(63)에 의해 취득한 물체의 형상 정보에 기초하여, 물체는 장애물인지의 여부를 판정한다(단계 10). 구체적으로, 판정부(64)는 형상 취득부(63)에 의해 취득한 물체의 높이 치수에 기초하여, 물체가 장애물인지의 여부를 판정한다. 보다 상세하게 판정부(64)는 형상 취득부(63)에 의해 취득한 물체의 높이 치수가 소정의 높이 이상인 경우에, 물체가 장애물이라고 판정한다. 이 소정의 높이는, 예를 들어 전기청소기(11)(본체 케이스(20))가 올라타도 걸리지 않는 높이로 설정되어 있다.
그리고, 이 단계 10에서 물체는 장애물이 아닌(물체의 높이 치수가 소정의 높이 치수 미만)이라고 판정한 경우에는, 물체가 예를 들어 현관매트나 청소영역의 일부에 배치된 융단이나 카펫 등, 비교적 높이가 작고 올라탈 수 있는 물체인 것으로 상정되므로, 판정부(64)는 제어수단(27)(청소 제어부(67))에 의한 청소제어를 변경하고(단계 11), 단계 1로 되돌아가 물체를 피하지 않고 물체에 올라타게 한다. 이 단계 11의 청소제어의 변경으로서는, 예를 들어 청소부(22)의 전동송풍기(41)의 입력의 증감, 회전 브러시(42)(브러시 모터(43)) 및/또는 사이드 브러시(44, 44)(사이드 브러시 모터(45, 45))의 구동의 온오프 또는 구동속도를 제어수단(27)(청소 제어부(67))에 의해 변경한다. 예를 들어, 이 단계 10에서는 전동송풍기(41)의 입력을 증가시키고, 회전 브러시(42)(브러시 모터(43))의 구동속도를 증가시킴으로써 먼지제거를 향상시킨다. 또한, 이 청소제어의 변경은, 예를 들어 물체의 높이 치수에 복수의 임계값을 설정하고, 물체의 높이 치수가 큰(두꺼운) 경우와, 물체의 높이 치수가 작은(얇은) 경우에서, 다른 제어로 해도 좋다.
한편, 단계 10에서 물체는 장애물(물체의 높이 치수가 소정의 높이 치수 미만)이라고 판정한 경우에는, 전기청소기(11)(본체 케이스(20))의 전방에 회피해야할 물체나 들어갈 수 없는 좁은 장소가 위치하고 있는 것으로 상정되고, 판정부(64)는 제어수단(27)(주행제어부(66))에 의한 전기청소기(11)(본체 케이스(20))의 주행방향을 변경하고(단계 12)), 단계 1로 되돌아 간다. 이 주행방향의 변경으로서는 형상 취득부(63)에 의해 취득한 물체의 형상 정보에 기초하여, 그 형상정보에 따라서 적절하게 주행방향을 바꾸어 회피 동작하거나, 미리 설정된 단수, 또는 복수의 소정의 회피동작 루틴을 선택할 수 있다. 회피동작으로서는, 예를 들어 제어수단(27)(주행 제어부(66))가 모터(35, 35)(구동륜(34, 34))의 구동을 제어하고, 전기청소기(11)(본체 케이스(20))를 물체에 대하여 일단 정지시키고, 그 위치, 또는 소정 거리 후퇴한 위치에서 선회함으로써, 도 9(a)에 도시한 바와 같이 물체(O)를 크랭크 형상으로 회피하거나(물체 O가 비교적 작은 경우), 도 9(b), 도 9(c)에 도시한 바와 같이 물체 O로부터 이반하는 방향으로 주행 또는 물체(O)를 따라서 주행하거나(물체(O)가 벽 등인 경우) 한다.
그 결과, 전기청소기(11)(본체 케이스(20))는 청소영역 내의 바닥면상을, 장애물을 회피하면서 좁은 장소(NS)(도 7) 등 구석구석에 이르기까지 자율 주행하면서 청소부(22)를 제어수단(27)(청소 제어부(67))에 의해 동작시켜 바닥면의 먼지를 청소한다. 즉, 전기청소기(11)는 장애물을 검출해도 청소작업을 계속하는 등, 계속된 동작을 실시한다.
청소부(22)에서는 제어수단(27)(청소 제어부(67))에 의해 구동된 전동송풍기(41), 회전 브러시(42)(브러시 모터(43)), 또는 사이드 브러시(44)(사이드 브러시 모터(45))에 의해 바닥면의 먼지를, 흡입구(31)를 통하여 집진부(46)로 포집한다. 그리고, 맵한 청소영역의 청소가 완료된 경우, 또는 청소작업 중에 2차 전지(28)의 용량이 소정량까지 저하되어 청소나 촬상을 완료시키기에 부족한(2차 전지(28)의 전압이 방전 종지 전압 근방까지 저하되어 있는) 등의 소정 조건시에는 전기청소기(11)에서는 충전장치(12)에 귀환하도록 제어수단(27)(주행제어부(66))에 의해 모터(35, 35)(구동륜(34, 34))의 동작을 제어한다. 이 후, 충전단자(71, 71)와 충전장치(12)의 충전용 단자가 접속되면, 청소작업을 종료하고, 제어수단(27)이 대기모드, 또는 충전모드로 이행한다.
또한, 메모리(61)에 기억한 화상의 데이터는 예를 들어 전기청소기(11)가 충전장치(12)에 귀환했을 때, 청소작업 중에 수시로, 소정 시간마다, 또는 외부장치(17)로부터의 요구가 있었을 때 무선 LAN 디바이스(47)를 통하여 홈게이트웨이(14) 및 네트워크(15)를 경유하여 서버(16)에 송신한다. 또한, 송신이 종료된 데이터는 메모리(61)로부터 소거, 또는 새로운 데이터를 기억할 때 덮어쓰기함으로써, 메모리(61)의 용량을 효율 좋게 사용할 수 있다.
서버(16)에서는 전기청소기(11)로부터 송신된 화상의 데이터를 보존하고, 외부장치(17)로부터의 요구(액세스)에 따라서 그 화상의 데이터를 다운로드 가능하게 되어 있다.
그리고, 외부장치(17)에서는 서버(16)로부터 다운로드된 화상이 표시된다.
이상 설명한 일 실시형태에 따르면, 카메라(51a, 51b)에 의해 촬상한 화상에 의해, 전기청소기(11)(본체 케이스(20))의 주행방향측에 위치하는 물체의 거리 화상을 화상 생성부(62)에 의해 생성하고, 이 생성한 거리 화상으로부터, 촬상된 물체의 형상정보를 형상 취득부(63)에 의해 취득함으로써, 물체의 유무만이 아니라, 물체의 형상도 정밀도 좋게 검출할 수 있다.
또한, 형상 취득부(63)에 의해, 전기청소기(11)(본체 케이스(20))의 주행방향측에 위치하는 물체의 수평방향의 간격을 취득함으로써, 수평방향으로 전기청소기(11)(본체 케이스(20))가 들어가는 공간이 있는지의 여부를 용이하게 판정할 수 있다.
동일하게, 형상 취득부(63)에 의해, 전기청소기(11)(본체 케이스(20))의 주행방향측에 위치하는 물체의 상하방향의 간격을 취득함으로써, 상하방향으로 전기청소기(11)(본체 케이스(20))가 들어가는 공간이 있는지의 여부를 용이하게 판정할 수 있다.
이 때문에, 이들 수평방향 및 상하방향의 간격의 취득 등의 형상정보에 기초하여, 형상 취득부(63)에 의해, 전기청소기(11)(본체 케이스(20))의 전방에 좁은 장소(NS)(도 7)가 위치하고 있는지의 여부를 취득함으로써, 전기청소기(11)(본체 케이스(20)가 침대 등의 물체(O)(도 7)의 하부의 다리부(LP, LP) 사이나, 의자 등의 물체의 다리부 사이 등에 들어가도록 주행 제어할 수 있다.
그리고, 제어수단(27)이 형상 취득부(63)에 의해 취득한 형상정보에 따라서 전기청소기(11)(본체 케이스(20))의 주행을 제어하도록 모터(35, 35)(구동륜(34, 34))의 동작을 제어함으로써, 주행의 방해가 되는 장애물 등을, 충돌하기 전에 미연에 회피하고, 또한 장애물을 필요 이상으로 크게 회피하지 않고, 장애물의 근방을 따르게 하여 전기청소기(11)(본체 케이스(20))를 주행시킬 수 있어, 주행성능을 향상시킬 수 있다. 이 때문에, 청소영역내를 구석구석까지 청소할 수 있고, 청소성능을 향상시킬 수 있다.
구체적으로, 제어수단(27)이 형상 취득부(63)에 의해 취득한 물체의 형상정보에 따라서 전기청소기(11)(본체 케이스(20))의 주행속도를 제어하도록 모터(35, 35)(구동륜(34, 34))의 동작을 제어함으로써, 예를 들어 전기청소기(11)(본체 케이스(20))의 전방에 비교적 공간이 큰, 즉 주행의 방해가 되는 장애물이 되지 않는 경우에는, 전기청소기(11)(본체 케이스(20))를 상대적으로 고속으로 주행시켜 효율 좋게 청소할 수 있고, 또한 전기청소기(11)(본체 케이스(20))가 좁은 장소(NS)(도 7)에 들어갈 때, 이 좁은 장소(NS)(도 7)의 폭 치수나 높이 치수가 전기청소기(11)(본체 케이스(20))의 외형 빠듯한 형상인 경우 등에는, 전기청소기(11)(본체 케이스(20))를 상대적으로 저속으로 주행시켜 좁은 장소(NS)에 들어가기 쉽게 하는 등도 가능하게 된다.
동일하게, 제어수단(27)이 형상 취득부(63)에 의해 취득한 물체의 형상정보에 따라서 전기청소기(11)(본체 케이스(20))의 주행방향을 제어하도록 모터(35, 35)(구동륜(34, 34))의 동작을 제어함으로써, 예를 들어 전기청소기(11)(본체 케이스(20))의 전방에 위치하는 장애물의 형상에 따라서 그 회피동작을 다르게 하는 것 등도 가능해진다.
따라서, 물체의 형상에 적합한 전기청소기(11)(본체 케이스(20))의 주행제어가 가능해진다.
또한, 형상 취득부(63)에 의해 거리 화상으로부터 얻어진 소정의 거리에서 물체의 형상 정보를 취득하는 경우에는, 전기청소기(11)(본체 케이스(20))가 현재의 위치로부터 소정 거리의 위치까지 주행했을 때, 이 소정의 거리에 위치하는 물체에 대해서 전기청소기(11)(본체 케이스(20))가 충돌하지 않도록 주행 제어하는 것이 가능해진다.
또한, 형상 취득부(63)에 의해 거리 화상으로부터 얻어진 소정의 거리범위에서 물체의 형상을 취득하는 경우에는, 전기청소기(11)(본체 케이스(20))가 현재의 위치로부터 소정의 거리범위내에 전부(前部)가 위치할 때까지 주행했을 때, 이 거리범위내에 위치하는 물체에 대해서 전기청소기(11)(본체 케이스(20))가 충돌하지 않도록 주행 제어하는 것이 가능해진다.
또한, 제어수단(27)이 형상 취득부(63)에 의해 취득한 물체의 형상정보에 따라서 청소부(22)의 동작을 제어함으로써, 형상 취득부(63)에 의해 취득한 물체의 형상정보로부터, 전기청소기(11)(본체 케이스(20))가 예를 들어 융단이나 카펫 등에 올라탈 수 있다고 판정했을 때 등의, 바닥면의 종류가 변화된다고 판정한 경우에, 그 바닥면에 적합한 청소 상태로 할 수 있어, 청소효율을 향상시킬 수 있다.
또한, 상기 일 실시형태에서, 형상 취득부(63)에 의해 취득한 물체의 형상정보에 기초하는 제어수단(27)(주행제어부(66))에 의한 전기청소기(11)(본체 케이스(20))의 주행 제어는, 상기의 형태에 한정되지 않고, 물체의 형상에 대응시켜 임의로 설정할 수 있다.
또한, 카메라(51a, 51b)를 본체 케이스(20)(측면부(20a))의 좌우 방향으로 거의 동등한 위치, 즉 상하에 배치할 수도 있다.
또한, 카메라(51a, 51b) 중 적어도 어느 것을, 적외영역의 화상을 촬상하는, 적외선 카메라로 할 수도 있다.
또한, 화상의 표시는 제어수단(27)에 의해 외부장치(17)에서 표시 가능해지도록 처리하는 구성 이외에, 예를 들어 각각 외부장치(17)에 인스톨된 전용의 프로그램(어플리케이션)에 의해 외부장치(17)에서 표시하도록 처리할 수도 있고, 제어수단(27), 또는 서버(16)에서 미리 처리를 해 두고, 외부장치(17)의 브라우저 등의 범용의 프로그램에 의해 표시할 수도 있다. 즉, 표시제어수단(표시 제어부)으로서는 서버(16)에 보존된 프로그램이나, 외부장치(17)에 인스톨된 프로그램 등에 의해 화상을 표시하게 하는 구성으로 할 수도 있다.
또한, 메모리(61)에 일시 기억한 화상 등의 데이터는, 서버(16)에 송신하여 서버(16)에 기억하도록 했지만, 메모리(61)에 그대로 기억해 두어도 좋고, 외부장치(17)에 기억해 두어도 좋다.
또한, 카메라(51a, 51b)에서 촬상한 화상이나 화상 생성부(62)에서 생성한 거리 화상은 외부장치(17)에 한정되지 않고, 예를 들어 전기청소기(11) 자체에 설치한 표시부 등에 표시할 수도 있다. 이 경우에는, 메모리(61)로부터 서버(16)로와 홈게이트웨이(14) 및 네트워크(15) 경유로 데이터를 송신하지 않아도 좋고, 전기청소기(11)의 구성이나 제어를 보다 간략화할 수도 있다.
그리고, 화상 생성부(62), 형상 취득부(63), 판정부(64), 청소 제어부(67), 촬상 제어부(68) 및 조명 제어부(69)는 각각 제어수단(27) 중에 구비했지만, 각각 서로 별개의 구성으로 해도 좋고, 어느 2개 이상을 임의로 조합해도 좋다.
또한, 화상 생성부(62)에 의한 거리계산은 청소작업시뿐만 아니라, 전기청소기(11)(본체 케이스(20))의 임의의 주행시에도 사용할 수 있다.
또한, 촬상수단은 3개 이상 설정되어 있어도 좋다. 즉, 촬상수단은 복수이면 그 갯수는 한정되지 않는다.
본 발명의 일 실시형태를 설명했지만, 이 실시형태는 예로서 제시한 것이고, 발명의 범위를 한정하려는 의도는 없다. 이 신규의 실시형태는 그 밖의 여러가지 형태로 실시되는 것이 가능하고, 발명의 요지를 벗어나지 않는 범위에서, 여러가지 생략, 치환, 변경을 실시할 수 있다. 이 실시형태나 그 변형은 발명의 범위나 요지에 포함되고, 또한 특허청구범위에 기재된 발명과 그 균등한 범위에 포함된다.
주행방향측을 촬상하는 복수의 촬상수단을 서로 이격된 위치에 구비하는 본체 케이스를 자율주행시키는 전기청소기의 제어방법으로, 촬상수단에 의해 촬상한 화상에 의해, 이 주행방향측에 위치하는 물체의 거리 화상을 생성하고, 이 생성된 거리 화상으로부터 촬상된 물체의 형상정보를 취득하는 것을 특징으로 한 전기청소기의 제어방법.
거리 화상으로부터 얻어진 소정의 거리에서, 물체의 형상정보를 취득하는 것을 특징으로 한 전기청소기의 제어방법.
거리 화상으로부터 얻어진 소정의 거리범위에서, 물체의 형상정보를 취득하는 것을 특징으로 한 전기청소기의 제어방법.
물체의 형상정보에 기초하여 본체 케이스의 주행방향측에 좁은 장소가 위치하고 있는지의 여부를 취득하는 것을 특징으로 한 전기청소기의 제어방법.
본체 케이스의 주행방향측에 위치하는 물체의 수평방향의 간격을 취득하는 것을 특징으로 한 전기청소기의 제어방법.
본체 케이스의 주행방향측에 위치하는 물체의 상하방향의 간격을 취득하는 것을 특징으로 한 전기청소기의 제어방법.
형상취득수단에 의해 취득한 물체의 형상정보에 따라서 본체 케이스의 주행을 제어하는 것을 특징으로 한 전기청소기의 제어방법.
형상취득수단에 의해 취득한 물체의 형상정보에 따라서 본체 케이스의 주행속도를 제어하는 것을 특징으로 한 전기청소기의 제어방법.
형상취득수단에 의해 취득한 물체의 형상정보에 따라서 본체 케이스의 주행방향을 제어하는 것을 특징으로 한 전기청소기의 제어방법.
취득한 물체의 형상정보에 따라서 청소부의 동작을 제어하는 것을 특징으로 한 전기청소기의 제어방법.
Claims (10)
- 본체 케이스,
상기 본체 케이스를 주행 가능하게 하는 구동륜,
상기 구동륜의 구동을 제어함으로써 상기 본체 케이스를 자율 주행시키는 제어수단,
상기 본체 케이스에 배치되어 서로 이격되고, 상기 본체 케이스의 주행방향측을 촬상하는 복수의 촬상수단,
이들 촬상수단에 의해 촬상한 화상에 의해, 이 주행방향측에 위치하는 물체의 거리 화상을 생성하는 거리 화상 생성수단, 및
상기 거리 화상 생성수단에서 생성한 거리 화상으로부터, 촬상된 물체의 형상정보를 취득하는 형상취득수단을 구비한, 전기청소기. - 제 1 항에 있어서,
형상 취득 수단은 거리 화상으로부터 얻어진 소정의 거리에서, 물체의 형상정보를 취득하는, 전기청소기. - 제 1 항에 있어서,
형상취득수단은 거리 화상으로부터 얻어진 소정의 거리범위에서, 물체의 형상정보를 취득하는, 전기청소기. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
형상취득수단은 물체의 형상정보에 기초하여 본체 케이스의 주행방향측에 좁은 장소가 위치하고 있는지의 여부를 취득하는, 전기청소기. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
형상취득수단은 본체 케이스의 주행방향측에 위치하는 물체의 수평방향의 간격을 취득하는, 전기청소기. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
형상취득수단은 본체 케이스의 주행방향측에 위치하는 물체의 상하방향의 간격을 취득하는, 전기청소기. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
제어수단은 형상취득수단에 의해 취득한 물체의 형상정보에 따라서 본체 케이스의 주행을 제어하도록 구동륜의 동작을 제어하는, 전기청소기. - 제 7 항에 있어서,
제어수단은 형상취득수단에 의해 취득한 물체의 형상정보에 따라서 본체 케이스의 주행속도를 제어하도록 구동륜의 동작을 제어하는, 전기청소기. - 제 7 항 내지 제 8 항 중 어느 한 항에 있어서,
제어수단은 형상취득수단에 의해 취득한 물체의 형상정보에 따라서 본체 케이스의 주행방향을 제어하도록 구동륜의 동작을 제어하는, 전기청소기. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
제어수단은 형상취득수단에 의해 취득한 물체의 형상정보에 따라서 청소부의 동작을 제어하는, 전기청소기.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015200186A JP7007078B2 (ja) | 2015-10-08 | 2015-10-08 | 電気掃除機 |
| JPJP-P-2015-200186 | 2015-10-08 | ||
| PCT/JP2016/079290 WO2017061375A1 (ja) | 2015-10-08 | 2016-10-03 | 電気掃除機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170065564A true KR20170065564A (ko) | 2017-06-13 |
| KR102003787B1 KR102003787B1 (ko) | 2019-07-25 |
Family
ID=58487629
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177010884A KR102003787B1 (ko) | 2015-10-08 | 2016-10-03 | 전기청소기 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20180289225A1 (ko) |
| EP (1) | EP3360454B1 (ko) |
| JP (1) | JP7007078B2 (ko) |
| KR (1) | KR102003787B1 (ko) |
| CN (1) | CN107105958B (ko) |
| MY (1) | MY191840A (ko) |
| TW (1) | TWI641349B (ko) |
| WO (1) | WO2017061375A1 (ko) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180134230A (ko) * | 2017-06-08 | 2018-12-18 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| JP7065449B2 (ja) * | 2018-07-20 | 2022-05-12 | パナソニックIpマネジメント株式会社 | 自走式掃除機 |
| JP2020010981A (ja) * | 2018-07-20 | 2020-01-23 | パナソニックIpマネジメント株式会社 | 自走式掃除機 |
| JP2020110260A (ja) * | 2019-01-09 | 2020-07-27 | 三菱電機株式会社 | 自走式掃除機 |
| US11191407B2 (en) | 2019-01-31 | 2021-12-07 | Irobot Corporation | Cleaning of pet areas by autonomous cleaning robots |
| US10463217B1 (en) * | 2019-01-31 | 2019-11-05 | Irobot Corporation | Cleaning of pet areas by autonomous cleaning robots |
| CN111596651B (zh) * | 2019-02-19 | 2022-08-09 | 科沃斯机器人股份有限公司 | 环境区域划分与定点清扫方法、设备及存储介质 |
| US11523722B2 (en) * | 2019-05-28 | 2022-12-13 | Pixart Imaging Inc. | Dirtiness level determining method and electronic device applying the dirtiness level determining method |
| US11493336B2 (en) | 2020-06-22 | 2022-11-08 | Pixart Imaging Inc. | Optical navigation device which can determine dirtiness level of cover or fix multi light pattern issue |
| CN110279350A (zh) * | 2019-06-20 | 2019-09-27 | 深圳市银星智能科技股份有限公司 | 自移动设备移动方法及自移动设备 |
| KR20210084129A (ko) * | 2019-12-27 | 2021-07-07 | 삼성전자주식회사 | 로봇 청소기 및 그 제어 방법 |
| CA3105484A1 (en) * | 2020-01-10 | 2021-07-10 | Bissell Inc. | Autonomous floor cleaner and method for autonomous floor cleaning |
| CN113848872B (zh) * | 2020-06-28 | 2024-03-15 | 苏州科瓴精密机械科技有限公司 | 自动行走设备及其控制方法及可读存储介质 |
| US20220284707A1 (en) * | 2021-03-08 | 2022-09-08 | Beijing Roborock Technology Co., Ltd. | Target detection and control method, system, apparatus and storage medium |
| CN113687438A (zh) * | 2021-09-22 | 2021-11-23 | 汤恩智能科技(常熟)有限公司 | 一种防压脚检测方法及终端 |
| JPWO2023145529A1 (ko) * | 2022-01-31 | 2023-08-03 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040062040A (ko) * | 2002-12-31 | 2004-07-07 | 엘지전자 주식회사 | 화상처리를 이용한 로봇 청소기의 자동충전장치 및 방법 |
| JP2006209644A (ja) * | 2005-01-31 | 2006-08-10 | Matsushita Electric Works Ltd | 清掃ロボット |
| JP2006260105A (ja) * | 2005-03-16 | 2006-09-28 | Matsushita Electric Works Ltd | 移動装置 |
| JP2007163223A (ja) | 2005-12-12 | 2007-06-28 | Sharp Corp | 移動量検知装置 |
| JP2008009999A (ja) * | 2007-07-27 | 2008-01-17 | Sony Corp | 平面抽出方法、その装置、そのプログラム、その記録媒体及び撮像装置 |
| EP2623010A2 (en) * | 2012-02-04 | 2013-08-07 | LG Electronics, Inc. | Robot cleaner |
| JP2013235351A (ja) | 2012-05-07 | 2013-11-21 | Sharp Corp | 自走式電子機器 |
| US20130338831A1 (en) * | 2012-06-18 | 2013-12-19 | Dongki Noh | Robot cleaner and controlling method of the same |
| JP2014194729A (ja) * | 2013-02-27 | 2014-10-09 | Sharp Corp | 周囲環境認識装置、それを用いた自律移動システムおよび周囲環境認識方法 |
| US20160144512A1 (en) * | 2013-07-15 | 2016-05-26 | Lg Electronics Inc. | Robot cleaner and method for auto-correcting 3d sensor of the robot cleaner |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003023699A (ja) * | 2001-07-05 | 2003-01-24 | Saibuaasu:Kk | 空間情報聴覚化装置および空間情報聴覚化方法 |
| JP2003304992A (ja) * | 2002-04-17 | 2003-10-28 | Hitachi Ltd | 自走式掃除機 |
| CN1287722C (zh) * | 2002-06-21 | 2006-12-06 | 泰怡凯电器(苏州)有限公司 | 自动吸尘器的可清扫区域和障碍物区域的识别方法 |
| DE102005046813A1 (de) * | 2005-09-30 | 2007-04-05 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betreiben eines selbsttätig verfahrbaren Haushaltsgerätes sowie Verfahren zum Betreiben einer Basisstation |
| JP2008090380A (ja) * | 2006-09-29 | 2008-04-17 | Matsushita Electric Ind Co Ltd | 自律走行装置およびプログラム |
| DE102008014912B4 (de) * | 2008-03-19 | 2023-01-19 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Bodenstaub-Aufsammelgerät |
| DE102010017689A1 (de) * | 2010-07-01 | 2012-01-05 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Gerät sowie Verfahren zur Orientierung eines solchen Gerätes |
| KR101850386B1 (ko) * | 2011-04-19 | 2018-04-19 | 엘지전자 주식회사 | 로봇 청소기 및 이의 제어 방법 |
| TW201319853A (zh) * | 2011-11-10 | 2013-05-16 | Univ Shu Te | 雲端清潔監控系統 |
| JP2013242738A (ja) * | 2012-05-22 | 2013-12-05 | Sharp Corp | ロボット装置、端末装置、ロボット装置の遠隔操作システム及びプログラム |
| JP2014048842A (ja) * | 2012-08-30 | 2014-03-17 | Brother Ind Ltd | 自律移動型機器 |
| JP6030405B2 (ja) * | 2012-10-25 | 2016-11-24 | シャープ株式会社 | 平面検出装置およびそれを備えた自律移動装置 |
| EP2764812B1 (de) * | 2013-02-12 | 2015-07-08 | Hako GmbH | Reinigungsroboter |
| KR102071947B1 (ko) * | 2013-05-10 | 2020-01-31 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
| JP6155100B2 (ja) * | 2013-06-04 | 2017-06-28 | シャープ株式会社 | 自走式電子機器 |
| KR102094347B1 (ko) * | 2013-07-29 | 2020-03-30 | 삼성전자주식회사 | 자동 청소 시스템, 청소 로봇 및 그 제어 방법 |
| KR102093177B1 (ko) * | 2013-10-31 | 2020-03-25 | 엘지전자 주식회사 | 이동 로봇 및 그 동작방법 |
| US9504367B2 (en) * | 2013-11-20 | 2016-11-29 | Samsung Electronics Co., Ltd. | Cleaning robot and method for controlling the same |
| KR20150104311A (ko) * | 2014-03-05 | 2015-09-15 | 엘지전자 주식회사 | 로봇 청소기 및 그의 제어방법 |
-
2015
- 2015-10-08 JP JP2015200186A patent/JP7007078B2/ja active Active
-
2016
- 2016-10-03 KR KR1020177010884A patent/KR102003787B1/ko active IP Right Grant
- 2016-10-03 US US15/766,646 patent/US20180289225A1/en not_active Abandoned
- 2016-10-03 MY MYPI2018701384A patent/MY191840A/en unknown
- 2016-10-03 EP EP16853529.2A patent/EP3360454B1/en active Active
- 2016-10-03 WO PCT/JP2016/079290 patent/WO2017061375A1/ja active Application Filing
- 2016-10-03 CN CN201680003520.5A patent/CN107105958B/zh active Active
- 2016-10-05 TW TW105132117A patent/TWI641349B/zh not_active IP Right Cessation
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040062040A (ko) * | 2002-12-31 | 2004-07-07 | 엘지전자 주식회사 | 화상처리를 이용한 로봇 청소기의 자동충전장치 및 방법 |
| JP2006209644A (ja) * | 2005-01-31 | 2006-08-10 | Matsushita Electric Works Ltd | 清掃ロボット |
| JP2006260105A (ja) * | 2005-03-16 | 2006-09-28 | Matsushita Electric Works Ltd | 移動装置 |
| JP2007163223A (ja) | 2005-12-12 | 2007-06-28 | Sharp Corp | 移動量検知装置 |
| JP2008009999A (ja) * | 2007-07-27 | 2008-01-17 | Sony Corp | 平面抽出方法、その装置、そのプログラム、その記録媒体及び撮像装置 |
| EP2623010A2 (en) * | 2012-02-04 | 2013-08-07 | LG Electronics, Inc. | Robot cleaner |
| KR20130090438A (ko) * | 2012-02-04 | 2013-08-14 | 엘지전자 주식회사 | 로봇 청소기 |
| JP2013235351A (ja) | 2012-05-07 | 2013-11-21 | Sharp Corp | 自走式電子機器 |
| US20130338831A1 (en) * | 2012-06-18 | 2013-12-19 | Dongki Noh | Robot cleaner and controlling method of the same |
| JP2014194729A (ja) * | 2013-02-27 | 2014-10-09 | Sharp Corp | 周囲環境認識装置、それを用いた自律移動システムおよび周囲環境認識方法 |
| US20160144512A1 (en) * | 2013-07-15 | 2016-05-26 | Lg Electronics Inc. | Robot cleaner and method for auto-correcting 3d sensor of the robot cleaner |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102003787B1 (ko) | 2019-07-25 |
| WO2017061375A1 (ja) | 2017-04-13 |
| TWI641349B (zh) | 2018-11-21 |
| EP3360454A4 (en) | 2019-04-24 |
| JP7007078B2 (ja) | 2022-01-24 |
| MY191840A (en) | 2022-07-18 |
| US20180289225A1 (en) | 2018-10-11 |
| JP2017070558A (ja) | 2017-04-13 |
| CN107105958B (zh) | 2020-08-25 |
| TW201713265A (zh) | 2017-04-16 |
| EP3360454A1 (en) | 2018-08-15 |
| EP3360454B1 (en) | 2021-08-25 |
| CN107105958A (zh) | 2017-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102003787B1 (ko) | 전기청소기 | |
| KR101840158B1 (ko) | 전기청소기 | |
| CN109891348B (zh) | 自主行走体 | |
| JP6685755B2 (ja) | 自律走行体 | |
| TWI653022B (zh) | Autonomous mobile body | |
| CN106998983B (zh) | 电动吸尘器 | |
| JP6864433B2 (ja) | 電気掃除機 | |
| WO2018087952A1 (ja) | 電気掃除機 | |
| JP6814095B2 (ja) | 電気掃除機 | |
| US11119484B2 (en) | Vacuum cleaner and travel control method thereof | |
| JP7141220B2 (ja) | 自走式電気掃除機 | |
| CN110325089B (zh) | 电动吸尘器 | |
| JP2019109854A (ja) | 自律走行体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| AMND | Amendment | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) |