KR20160044779A - 단말의 협력 센싱 방법 및 협력 센싱을 수행하는 단말 - Google Patents
단말의 협력 센싱 방법 및 협력 센싱을 수행하는 단말 Download PDFInfo
- Publication number
- KR20160044779A KR20160044779A KR1020140139668A KR20140139668A KR20160044779A KR 20160044779 A KR20160044779 A KR 20160044779A KR 1020140139668 A KR1020140139668 A KR 1020140139668A KR 20140139668 A KR20140139668 A KR 20140139668A KR 20160044779 A KR20160044779 A KR 20160044779A
- Authority
- KR
- South Korea
- Prior art keywords
- terminal
- sensing
- cooperative
- information
- request
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7221—Determining signal validity, reliability or quality
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6887—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient mounted on external non-worn devices, e.g. non-medical devices
- A61B5/6898—Portable consumer electronic devices, e.g. music players, telephones, tablet computers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/70—Services for machine-to-machine communication [M2M] or machine type communication [MTC]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/02—Operational features
- A61B2560/0204—Operational features of power management
- A61B2560/0214—Operational features of power management of power generation or supply
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/02—Operational features
- A61B2560/0223—Operational features of calibration, e.g. protocols for calibrating sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/024—Measuring pulse rate or heart rate
- A61B5/02416—Measuring pulse rate or heart rate using photoplethysmograph signals, e.g. generated by infrared radiation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1112—Global tracking of patients, e.g. by using GPS
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/80—Services using short range communication, e.g. near-field communication [NFC], radio-frequency identification [RFID] or low energy communication
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Physiology (AREA)
- Multimedia (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Psychiatry (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mobile Radio Communication Systems (AREA)
- Cardiology (AREA)
- Radar, Positioning & Navigation (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
Abstract
Description
도 2는 일 실시예에 따른 네트워크에 포함된 복수의 단말들의 협력 센싱 수행 방법을 설명하기 위한 흐름도이다.
도 3은 일 실시예에 따른 협력 센싱을 수행하는 단말을 설명하기 위한 블록도이다.도 4 내지 도 7은 일 실시예에 따른 협력 센싱을 설명하기 위한 도면이다.
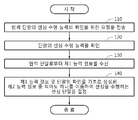
도 8은 일 실시예에 따른 협력 단말의 협력 센싱 수행 방법을 설명하기 위한 도면이다.
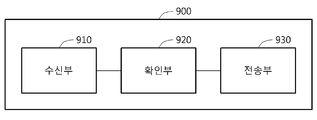
도 9는 일 실시예에 따른 협력 센싱을 수행하는 협력 단말을 설명하기 위한 블록도이다.
Claims (20)
- 단말과 연결된 적어도 하나의 협력 단말로 상기 협력 단말의 센싱 수행 능력의 확인을 위한 요청을 전송하는 단계;
상기 단말의 센싱 수행 능력을 확인하는 단계;
상기 협력 단말로부터 상기 요청을 기초로 생성된 제1 능력 정보를 수신하는 단계; 및
상기 제1 능력 정보 및 상기 단말의 확인을 기초로 생성된 제2 능력 정보 중 적어도 하나를 이용하여, 센싱을 수행하는 센싱 단말을 결정하는 단계
를 포함하는 단말의 협력 센싱 수행 방법. - 제1항에 있어서,
상기 협력 단말의 센싱 수행 능력의 확인을 위한 요청을 전송하는 단계는,
상기 협력 단말의 상기 센싱에 대한 센싱 정확도의 확인을 위해 파일럿 센싱을 요청하는 단계
를 포함하고,
상기 단말의 센싱 수행 능력을 확인하는 단계는,
상기 단말의 상기 센싱에 대한 센싱 정확도의 확인을 위해 파일럿 센싱을 수행하는 단계
를 포함하는,
단말의 협력 센싱 수행 방법. - 제1항에 있어서,
상기 센싱 단말을 결정하는 단계는,
상기 단말 및 상기 협력 단말의 상태 정보를 추가로 이용하여 상기 단말이 상기 센싱 단말을 결정하는,
단말의 협력 센싱 수행 방법. - 제3항에 있어서,
상기 단말 및 상기 협력 단말의 상태 정보는,
상기 단말 및 상기 협력 단말에 포함된 센서에 대한 정보, 상기 단말 및 상기 협력 단말의 배터리 정보, 상기 단말 및 상기 협력 단말이 상기 센싱을 수행하는데 필요한 전력, 및 사용자의 상기 센싱 단말에 대한 선호도 정보 중 적어도 하나를 포함하는,
단말의 협력 센싱 수행 방법. - 제1항에 있어서,
상기 센싱 단말을 결정하는 단계는,
상기 제1 능력 정보 및 상기 제2 능력 정보를 이용하여 상기 단말 및 상기 협력 단말의 상기 센싱에 대한 센싱 정확도를 확인하는 단계; 및
상기 확인된 센싱 정확도간의 차이가 기준 범위 이내에 있는 경우, 상기 단말 및 상기 협력 단말의 배터리 정보를 이용하여 상기 단말이 상기 센싱 단말을 결정하는 단계
를 포함하는,
단말의 협력 센싱 수행 방법. - 제1항에 있어서,
상기 센싱 단말을 결정하는 단계는,
상기 제1 능력 정보 및 상기 제2 능력 정보를 이용하여 상기 단말 및 상기 협력 단말의 상기 센싱에 대한 센싱 정확도를 확인하는 단계; 및
상기 확인된 센싱 정확도간의 차이가 기준 범위 이내에 있는 경우, 사용자의 상기 센싱 단말에 대한 선호도 정보를 이용하여 상기 단말이 상기 센싱 단말을 결정하는 단계
를 포함하는,
단말의 협력 센싱 수행 방법. - 제1항에 있어서,
상기 협력 단말이 상기 센싱 단말로 결정된 경우, 상기 센싱의 수행을 위한 센싱 요청을 상기 협력 단말로 전송하는 단계;
상기 센싱의 수행에 따라 획득된 센싱 정보를 상기 협력 단말로부터 수신하는 단계; 및
상기 센싱 정보를 시각적 방식, 청각적 방식, 및 촉각적 방식 중 적어도 하나의 방식을 통해 출력하는 단계
를 더 포함하는,
단말의 협력 센싱 수행 방법. - 제2항에 있어서,
상기 단말과 연결된 복수의 주변 단말들 중에서 상기 주변 단말들의 상태 정보를 이용하여 상기 파일럿 센싱을 수행할 상기 협력 단말을 결정하는 단계
를 더 포함하는,
단말의 협력 센싱 수행 방법. - 제8항에 있어서,
상기 상태 정보는,
상기 복수의 주변 단말들 각각에 포함된 센서의 정보, 상기 복수의 주변 단말들 각각의 배터리 정보, 상기 복수의 주변 단말들 각각이 상기 파일럿 센싱을 수행하는데 필요한 전력 중 적어도 하나를 포함하는,
단말의 협력 센싱 수행 방법. - 제2항에 있어서,
상기 센싱 정확도는 상기 단말 및 상기 협력 단말 각각의 주변 환경에 기초하여 결정되는,
단말의 협력 센싱 수행 방법. - 협력 단말과 연결된 단말로부터 상기 협력 단말의 센싱 수행 능력의 확인을 위한 요청을 수신하는 단계;
상기 요청을 기초로 상기 협력 단말의 센싱 수행 능력을 확인하는 단계; 및
상기 확인을 기초로 생성된 제1 능력 정보를 상기 단말로 전송하는 단계
를 포함하고,
상기 제1 능력 정보 및 상기 단말의 센싱 수행 능력의 확인을 기초로 생성된 제2 능력 정보 중 적어도 하나가 이용되어 센싱을 수행하는 센싱 단말이 상기 단말에 의해 결정되는,
협력 단말의 협력 센싱 수행 방법. - 제11항에 있어서,
상기 협력 단말의 센싱 수행 능력을 확인하는 단계는,
상기 협력 단말의 상기 센싱에 대한 센싱 정확도를 확인하기 위해 파일럿 센싱을 수행하는 단계
를 포함하는,
협력 단말의 협력 센싱 수행 방법. - 제11항에 있어서,
상기 센싱 단말은,
상기 단말 및 상기 협력 단말의 상태 정보가 추가로 이용되어 상기 단말에 의해 결정되는,
협력 단말의 협력 센싱 수행 방법. - 제13항에 있어서,
상기 단말 및 상기 협력 단말의 상태 정보는,
상기 단말 및 상기 협력 단말에 포함된 센서에 대한 정보, 상기 단말 및 상기 협력 단말의 배터리 정보, 상기 단말 및 상기 협력 단말이 상기 센싱을 수행하는데 필요한 전력, 및 사용자의 상기 센싱 단말에 대한 선호도 정보 중 적어도 하나를 포함하는,
협력 단말의 협력 센싱 수행 방법. - 단말과 연결된 적어도 하나의 협력 단말로 상기 협력 단말의 센싱 수행 능력의 확인을 위한 요청을 전송하는 전송부;
상기 단말의 센싱 수행 능력을 확인하는 확인부;
상기 협력 단말로부터 상기 요청을 기초로 생성된 제1 능력 정보를 수신하는 수신부; 및
상기 제1 능력 정보 및 상기 단말의 확인을 기초로 생성된 제2 능력 정보 중 적어도 하나를 이용하여, 센싱을 수행하는 센싱 단말을 결정하는 제어부
를 포함하는 협력 센싱을 수행하는 단말. - 제15항에 있어서,
상기 전송부는, 상기 협력 단말의 상기 센싱에 대한 센싱 정확도의 확인을 위해 파일럿 센싱을 요청하고,
상기 확인부는, 상기 단말의 상기 센싱에 대한 센싱 정확도의 확인을 위해 파일럿 센싱을 수행하는,
협력 센싱을 수행하는 단말. - 제15항에 있어서,
상기 제어부는,
상기 단말 및 상기 협력 단말의 상태 정보를 추가로 이용하여 상기 센싱 단말을 결정하는,
협력 센싱을 수행하는 단말. - 제17항에 있어서,
상기 단말 및 상기 협력 단말의 상태 정보는,
상기 단말 및 상기 협력 단말에 포함된 센서에 대한 정보, 상기 단말 및 상기 협력 단말의 배터리 정보, 상기 단말 및 상기 협력 단말이 상기 센싱을 수행하는데 필요한 전력, 및 사용자의 상기 센싱 단말에 대한 선호도 정보 중 적어도 하나를 포함하는,
협력 센싱을 수행하는 단말. - 제15항에 있어서,
상기 제어부는,
상기 제1 능력 정보 및 상기 제2 능력 정보를 이용하여 상기 단말 및 상기 협력 단말의 상기 센싱에 대한 센싱 정확도를 확인하고, 상기 확인된 센싱 정확도간의 차이가 기준 범위 이내에 있는 경우, 상기 단말 및 상기 협력 단말의 배터리 정보를 이용하여 상기 센싱 단말을 결정하는,
협력 센싱을 수행하는 단말. - 협력 단말과 연결된 단말로부터 상기 협력 단말의 센싱 수행 능력의 확인을 위한 요청을 수신하는 수신부;
상기 요청을 기초로 상기 협력 단말의 센싱 수행 능력을 확인하는 확인부; 및
상기 확인을 기초로 생성된 제1 능력 정보를 상기 단말로 전송하는 전송부
를 포함하고,
상기 제1 능력 정보 및 상기 단말의 센싱 수행 능력의 확인을 기초로 생성된 제2 능력 정보 중 적어도 하나가 이용되어 센싱을 수행하는 센싱 단말이 상기 단말에 의해 결정되는,
협력 센싱을 수행하는 협력 단말.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140139668A KR102315893B1 (ko) | 2014-10-16 | 2014-10-16 | 단말의 협력 센싱 방법 및 협력 센싱을 수행하는 단말 |
| US14/661,226 US10307107B2 (en) | 2014-10-16 | 2015-03-18 | Cooperative sensing method and terminal for performing cooperative sensing |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140139668A KR102315893B1 (ko) | 2014-10-16 | 2014-10-16 | 단말의 협력 센싱 방법 및 협력 센싱을 수행하는 단말 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160044779A true KR20160044779A (ko) | 2016-04-26 |
| KR102315893B1 KR102315893B1 (ko) | 2021-10-22 |
Family
ID=55748072
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140139668A Active KR102315893B1 (ko) | 2014-10-16 | 2014-10-16 | 단말의 협력 센싱 방법 및 협력 센싱을 수행하는 단말 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10307107B2 (ko) |
| KR (1) | KR102315893B1 (ko) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10335045B2 (en) | 2016-06-24 | 2019-07-02 | Universita Degli Studi Di Trento | Self-adaptive matrix completion for heart rate estimation from face videos under realistic conditions |
| CN115734198A (zh) * | 2021-09-01 | 2023-03-03 | 华为技术有限公司 | 通信方法及装置 |
| CN116456326A (zh) * | 2022-01-07 | 2023-07-18 | 维沃移动通信有限公司 | 无线感知方法、装置、设备及存储介质 |
| CN116112959B (zh) * | 2023-04-11 | 2023-07-04 | 中国移动通信有限公司研究院 | 协同感知簇确定方法、装置、电子设备及可读存储介质 |
| CN119545563A (zh) * | 2023-08-30 | 2025-02-28 | 华为技术有限公司 | 通信方法及装置 |
| CN121334611A (zh) * | 2024-07-05 | 2026-01-13 | 荣耀终端股份有限公司 | 协同感知方法、装置、系统、终端、存储介质和程序产品 |
| CN121418896A (zh) * | 2024-07-25 | 2026-01-27 | 华为技术有限公司 | 一种通信方法和装置 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140237028A1 (en) * | 2010-09-30 | 2014-08-21 | Fitbit, Inc. | Methods, Systems and Devices for Automatic Linking of Activity Tracking Devices To User Devices |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100628380B1 (ko) | 2004-12-17 | 2006-09-27 | 한국전자통신연구원 | 유비쿼터스 시스템 구현을 위한 센싱 장치 및 이를 이용한휴대 단말 장치 |
| KR100748984B1 (ko) | 2005-08-31 | 2007-08-13 | 엘지전자 주식회사 | 센서가 구비되는 이동통신 단말기 |
| KR100910034B1 (ko) * | 2007-10-30 | 2009-07-30 | 고려대학교 산학협력단 | 다중 포트를 갖는 전파 혈당 측정장치 및 그 제어방법 |
| KR100966590B1 (ko) | 2007-12-11 | 2010-06-29 | 한국전자통신연구원 | 생체신호 측정 장치들의 상호 협업 방법 및 시스템 |
| US8229535B2 (en) | 2008-02-21 | 2012-07-24 | Dexcom, Inc. | Systems and methods for blood glucose monitoring and alert delivery |
| US9026656B2 (en) | 2008-11-04 | 2015-05-05 | Qualcomm Incorporated | Resource sharing over wireless personal area networks |
| DE102009004368A1 (de) * | 2009-01-08 | 2010-07-15 | Heraeus Kulzer Gmbh | Dentalmaterialien enthaltend antimikrobielle Wirkstoffe zur Verhinderung von Plaque-Anlagerungen |
| KR101602221B1 (ko) | 2009-05-19 | 2016-03-10 | 엘지전자 주식회사 | 이동 단말 및 그 제어 방법 |
| KR20110120372A (ko) | 2010-04-29 | 2011-11-04 | 한국기술교육대학교 산학협력단 | 무선 센서 네트워크에서 센서 노드의 효율적 에너지 관리를 위한 센싱 주기 제어에 따른 데이터 전송기법 |
| KR101201604B1 (ko) | 2011-01-13 | 2012-11-14 | 한국과학기술원 | 에너지 효율적인 협력 센싱 방법 및 장치 |
| KR101431213B1 (ko) | 2012-07-25 | 2014-08-18 | 성균관대학교산학협력단 | 무선 센서 네트워크에서 센서 노드의 에너지 절약을 위한 데이터 전송 방법 및 시스템 |
| CN103686591B (zh) * | 2012-09-06 | 2015-07-29 | 腾讯科技(深圳)有限公司 | 获取位置信息的方法和系统 |
-
2014
- 2014-10-16 KR KR1020140139668A patent/KR102315893B1/ko active Active
-
2015
- 2015-03-18 US US14/661,226 patent/US10307107B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140237028A1 (en) * | 2010-09-30 | 2014-08-21 | Fitbit, Inc. | Methods, Systems and Devices for Automatic Linking of Activity Tracking Devices To User Devices |
Also Published As
| Publication number | Publication date |
|---|---|
| US10307107B2 (en) | 2019-06-04 |
| US20160106371A1 (en) | 2016-04-21 |
| KR102315893B1 (ko) | 2021-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102315893B1 (ko) | 단말의 협력 센싱 방법 및 협력 센싱을 수행하는 단말 | |
| KR101871052B1 (ko) | 하이브리드 실내 측위 시스템 및 그 방법 | |
| US10187919B2 (en) | Proximity pairing based on signal strength | |
| JP6177089B2 (ja) | 2台の通信機器間の正確な直線距離推定のための方法およびシステム | |
| US10009733B2 (en) | Method and system for determining a position of a mobile device by an access point | |
| RU2666789C2 (ru) | Обнаружение пространственной близости | |
| US10123297B1 (en) | System, method and devices for performing wireless tracking | |
| US11223936B2 (en) | IoT management device for carrying out condition modification mode and method for controlling same | |
| TW201027873A (en) | Radio frequency charging system and method | |
| KR20150140021A (ko) | 위치 정보를 제공하기 위한 방법 및 장치 | |
| RU2016100440A (ru) | Определение удаленности устройств, взаимодействующих с медиа устройствами | |
| US20160057599A1 (en) | Method of controlling transmit power and electronic device therefor | |
| US11280892B2 (en) | Measuring device, information processing device, and communication system | |
| KR20170090957A (ko) | 전자 기기의 위치 판단 방법 및 장치 | |
| WO2013117734A1 (en) | A mobile device for wireless data communication and a method for a communicating data by wireless data communication in a data communication network | |
| JP6363466B2 (ja) | 無線通信装置及び通信制御方法 | |
| CN108449952A (zh) | 定位模式之间的转换 | |
| KR102514593B1 (ko) | Rf 핑거프린트 구축 방법 및 장치 | |
| KR20180134625A (ko) | 통신을 제어하는 전자장치 및 동작 방법 | |
| KR101487208B1 (ko) | 푸시 방식을 이용한 긴급 메시지 제공 방법과 상기 방법을 수행할 수 있는 장치 | |
| JP6070561B2 (ja) | 情報処理装置 | |
| CN104202358A (zh) | 在运动时采集人体生理数据的方法和装置 | |
| WO2016052583A1 (ja) | 情報処理装置、情報処理装置の制御方法、通信システム、および制御プログラム | |
| KR101647577B1 (ko) | 위치 추정 장치, 위치 추정 방법, 컴퓨터 프로그램 및 컴퓨터 판독 가능한 기록 매체 | |
| US20260118470A1 (en) | Method and device for classifying pose by using ultra wideband communication signal |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20141016 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20191014 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20141016 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20210426 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20210730 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20211015 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20211018 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20240912 Start annual number: 4 End annual number: 4 |