KR20150093615A - 조향 가능한 차량의 경사 방지 방법 및 장치 - Google Patents
조향 가능한 차량의 경사 방지 방법 및 장치 Download PDFInfo
- Publication number
- KR20150093615A KR20150093615A KR1020150018412A KR20150018412A KR20150093615A KR 20150093615 A KR20150093615 A KR 20150093615A KR 1020150018412 A KR1020150018412 A KR 1020150018412A KR 20150018412 A KR20150018412 A KR 20150018412A KR 20150093615 A KR20150093615 A KR 20150093615A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- steering angle
- curve
- steering
- slope
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 40
- 238000012937 correction Methods 0.000 claims abstract description 31
- 238000006073 displacement reaction Methods 0.000 claims abstract description 8
- 230000001133 acceleration Effects 0.000 claims description 38
- 238000013459 approach Methods 0.000 description 13
- 230000005484 gravity Effects 0.000 description 13
- 238000004364 calculation method Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000000418 atomic force spectrum Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 3
- 230000001105 regulatory effect Effects 0.000 description 3
- 230000000087 stabilizing effect Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 230000006641 stabilisation Effects 0.000 description 2
- 238000011105 stabilization Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 238000011002 quantification Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/24—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to vehicle inclination or change of direction, e.g. negotiating bends
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
- B66F17/003—Safety devices, e.g. for limiting or indicating lifting force for fork-lift trucks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07568—Steering arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2260/00—Interaction of vehicle brake system with other systems
- B60T2260/02—Active Steering, Steer-by-Wire
- B60T2260/022—Rear-wheel steering; Four-wheel steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/04—Control of vehicle driving stability related to roll-over prevention
- B60W2030/043—Control of vehicle driving stability related to roll-over prevention about the roll axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0026—Lookup tables or parameter maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2300/00—Indexing codes relating to the type of vehicle
- B60W2300/12—Trucks; Load vehicles
- B60W2300/121—Fork lift trucks, Clarks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
- B60W2710/182—Brake pressure, e.g. of fluid or between pad and disc
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
- B60W2710/207—Steering angle of wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/10—Road Vehicles
- B60Y2200/15—Fork lift trucks, Industrial trucks
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Automation & Control Theory (AREA)
- Civil Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
본 발명은 조향 가능한 차량(100)의 경사를 방지하기 위한 방법(1300)에 관한 것이며, 상기 방법(1300)은 결정하는 단계(1302)와 공급하는 단계(1304)를 포함한다. 결정하는 단계(1302)에서 경사 기준은 차량(100)의 조향 각도(206, 212) 및 속도(216)를 사용해서 결정된다. 공급하는 단계(1304)에서는, 경사 기준이 차량(100)에 대한 경사 위험을 나타내면, 조향 각도(206)를 위한 보정 신호(208)가 공급된다. 이 경우, 보정 신호(208)는, 경사를 방지하기 위해, 조향 각도(206)보다 차량(100)의 하나 이상의 조향 가능한 휠(110)의 더 작은 변위를 나타낸다.
Description
본 발명은 후륜 조향식 차량의 경사를 방지하기 위한 방법 및 장치에 관한 것이다.
차량, 특히 지게차와 같은 산업용 트럭의 경우, 차량에서의 구조적인 조건으로 인해, 차량이 운전자에 의해 급커브로 진입 조향될 때 경사 위험이 발생할 수 있다.
EP 814051 B1은 산업용 트럭을 작동시키기 위한 방법 및 산업용 트럭을 기술하고 있다.
본 발명의 과제는, 조향 가능한 차량의 경사를 방지하기 위한 방법 및 장치를 개선하는 것이다.
상기 과제는, 독립 청구항들에 따른 조향 가능한 차량의 경사를 방지하기 위한 방법 및 장치에 의해 해결된다.
제안되는 접근법은, 차량이 너무 빠른 속도로 급커브를 통과할 때 차량이 기울어질 수 있다는 지식을 기초로 한다. 커브 운행 동안 차량에 작용하는 원심 가속도는 차량의 커브 반경의 확대를 통해 감소될 수 있다. 속도의 감속을 통해 커브 반경은 다시 축소될 수 있다.
바람직하게 커브 반경은, 차량의 운전자가 보정 개입을 거의 인지하지 못할 정도로 확대된다. 커브 반경은, 경사 위험이 제거되는 순간에 다시 축소되기 때문에, 차량은 거의 차량의 민첩성의 저하 없이 커브를 돌아 이동될 수 있다. 높은 민첩성에도 불구하고, 차량의 안전성은 거의 모든 상황에서 보장될 수 있다.
조향 가능한 차량의 경사를 방지하기 위한 방법이 제안되며, 상기 방법은 하기 단계들을 포함한다.
차량의 조향 각도 및 속도를 사용해서 경사 기준을 결정하는 단계, 및
보정 신호가, 경사를 방지하기 위해, 조향 각도보다 차량의 하나 이상의 조향 가능한 휠의 더 작은 변위를 나타내는 조건에서, 경사 기준이 차량에 대한 경사 위험을 나타내면, 조향 각도를 위한 보정 신호를 공급하는 단계.
차량은 지게차 또는 후륜 조향식 차량일 수 있다. 차량이 2개의 조향되는 휠을 포함한다면, 경사를 방지하기 위해 두 휠 모두 회동된다. 차량이 하나의 조향되는 리어 휠을 포함한다면, 그에 상응하게 상기 하나의 조향되는 휠만이 회동된다.
차량은, 차량 상에 작용하는 경사 모멘트가 차량의 안정화 모멘트보다 더 클 때 기울어질 수 있다. 달리 말하면, 경사력(tilting force)을 자신의 기울어지는 레버 암(lever arm)를 곱한 값은, 안정화를 보장하기 위해, 안정화력(stabilizing force)을 자신의 안정화하는 레버 암을 곱한 값보다 크지 않아야 한다. 이 경우, 레버 암들은 공통 회전점 또는 공통 회전축에 관련된다. 경사 모멘트 또는 경사력은 차량의 실제 속도 및 차량의 실제 커브 반경에 따라 결정된다. 차량의 커브 반경은 다시 차량의 하나 또는 다수의 조향 가능한 휠의 각도 위치에 따라 결정된다. 조향 각도란 각도 위치에 대한 설정값 뿐만 아니라 각도 위치의 실제값도 의미할 수 있다. 설정값이 사용된다면, 본원에서 제안되는 방법은 제어 과정이다. 실제값이 사용된다면, 본원에서 제안되는 방법은 조절 과정이다. 경사 기준은, 차량이 기울어질 수도 있는지의 여부에 대한 판단이다. 그 경우, 경사에 대한 안전성을 증대하기 위해, 상대적으로 작은 경사 위험까지의 공차 범위가 고려될 수 있다. 경사 위험이 존재한다면, 경사 위험을 방지하기 위해, 보정 신호를 통해 차량의 조향에 개입이 이루어진다.
또한, 경사 기준이 차량에 대한 경사 위험을 나타내면, 차량의 속도를 감속하기 위한 제동 신호가 공급될 수 있다. 감속된 속도를 통해, 차량에 작용하는 원심 가속도는 감소되는데, 그 이유는 원심 가속도가 커브에서 차량의 속도와 직접 연결되어 있기 때문이다. 속도가 감속된 경우, 차량은 기울어지지 않으면서 상대적으로 더 급한 커브를 이동할 수 있다.
본원의 방법은, 보정된 조향 각도를 얻기 위해, 조향 각도와 보정 신호를 조합하는 단계를 포함할 수 있다. 보정된 조향 각도는 차량의 조향 장치를 위해 공급될 수 있다. 보정 신호는 혼합기에서 조향 각도와 조합될 수 있다. 보정 신호는, 차량의 조향 장치로 전송되는 조향 각도를 증가시키거나 감소시킬 수 있다. 이런 조합을 통해, 조향 각도는 차량의 조향 장치로 직접 전달될 수 있다. 그 다음, 보정은 경사 위험이 있을 때에만 실행된다.
또한, 차량의 요 레이트(yaw rate)도 경사 기준을 결정하기 위해 사용될 수 있다. 요 레이트는, 차량이 차량의 수직축을 중심으로 얼마만큼 빠르게 회전하는지를 나타낸다. 차량이 자신의 수직축을 중심으로 더 빠르게 회전할수록, 차량에 작용하는 원심 가속도도 더 커진다. 요 레이트가 커질수록, 경사 위험도 더 커진다.
조향 각도로서 차량에 대한 조향 각도 입력값(steering angle entry)이 경사 기준을 결정하기 위해 사용될 수 있다. 조향 각도 입력값은 차량의 스티어링 휠 또는 조이스틱에 의해 판독될 수 있다. 차량의 입력 장치에서 조향 각도의 판독을 통해, 차량이 실제로 반응하기 전에, 경사 위험은 감소될 수 있다.
결정하는 단계에서, 조향 각도로서 휠의 각도 위치가 경사 기준을 결정하기 위해 사용될 수 있다. 조향 각도는 차량의 휠에서 각도 센서에 의해 판독될 수 있다. 마찬가지로, 조향 각도는 차량의 조향 구동장치의 위치에 의해서도 판독될 수 있다. 차량의 조향된 휠에서 조향 각도의 판독을 통해, 차량에서의 실제 상황에 대한 반응이 수행될 수 있다. 따라서 본원에서 제안되는 방법에 의한 잘못된 개입은 방지될 수 있다.
또한, 차량의 경사 특성곡선이 경사 기준을 결정하기 위해 사용될 수 있다. 경사 특성곡선은 최대로 가능한 조향 각도와 정해진 속도 사이의 관계를 나타낼 수 있다. 경사 특성곡선은 사전 결정될 수 있다. 경사 특성곡선은 메모리에서 판독될 수 있다. 경사 특성곡선은 신속하면서도 간단하게 판독될 수 있다.
또한, 차량의 측면 차량 기울기가 경사 기준을 결정하기 위해 사용될 수 있다. 차량이 경사진 지반 상에 위치한다면, 차량의 무게중심은 이미 측면으로 변위된다. 그 결과, 차량의 중량이 차량을 안정화시키는 레버 암은, 차량이 평면 지반 상에 위치할 때보다 더 짧다. 차량이 비스듬한 지반 상에서 추가로 여전히 커브를 이동하고 있다면, 상대적으로 작은 원심 가속도만으로도 충분히 차량을 기울어지게 한다. 그러므로 경사진 지반 상에서 조향 각도는 평면 지반 상에서보다 더 강하게 보정될 수 있다. 마찬가지로, 경사진 지반 상에서 차량의 속도가 평면 지반 상에서보다 더 강하게 감속될 수 있다.
또한, 하나 이상의 공간 방향에서 차량의 가속도가 경사 기준을 결정하기 위해 사용될 수 있다. 차량 상의 가속도 센서를 통해, 가속도는 차량 상에서 직접 검출될 수 있다. 다수의 축에서의 가속도들을 고려하는 것을 통해, 차량의 경사는 특히 확실하게 식별될 수 있다.
차량 종축을 중심으로 측정되는 회전속도(rotating rate)에 의해, 마찬가지로 경사가 식별될 수 있다. 경사 각도는 회전속도의 적분을 통해 결정될 수 있으며, 경우에 따라 가속도를 통해 보조될 수 있다. 차량 종축 및 횡축을 중심으로 하는 회전속도를 고려하는 것을 통해, 측면에 걸쳐서, 또는 전방 또는 후방 방향으로 차량의 경사가 특히 확실하게 식별될 수 있다.
그 밖에도, 조향 가능한 차량의 경사를 방지하기 위한 장치가 제안되며, 상기 장치는 하기 특징들을 포함한다.
차량의 조향 각도 및 속도를 사용해서 경사 기준을 결정하기 위한 유닛, 및
보정 신호가 조향 각도보다 차량의 하나 이상의 조향 가능한 휠의 더 작은 변위를 나타내는 조건에서, 경사 기준이 차량에 대한 경사 위험을 나타내면, 보정 신호를 공급하도록 형성되는, 조향 각도를 위한 보상 신호를 공급하기 위한 유닛.
일 실시예에 따라서, 본원의 장치는, 보정 신호가 실제 운행 속도보다 차량의 더 낮은 속도를 나타내는 조건에서, 경사 기준이 차량에 대한 경사 위험을 나타내면, 보정 신호를 공급하도록 형성되는, 속도를 위한 보정 신호를 공급하기 위한 유닛을 포함한다.
본 발명은 하기에서 첨부된 도면들을 참고로 더 상세히 설명된다.
본 발명에 의해, 조향 가능한 차량의 경사를 방지하기 위한 방법 및 장치가 개선된다.
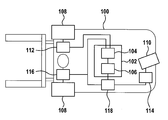
도 1은 본 발명의 일 실시예에 따른 차량의 경사를 방지하기 위한 장치를 장착한 차량을 도시한 개략도이다.
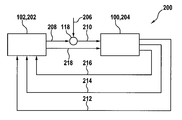
도 2는 본 발명의 일 실시예에 따른 조향 가능한 차량의 경사를 방지하기 위한 방법을 위한 조절 회로를 도시한 블록 회로도이다.
도 3은 본 발명의 일 실시예에 따라서 조향 가능한 차량의 경사를 방지하기 위한 방법을 위한 다차원 조절 회로를 도시한 블록 회로도이다.
도 4는 커브 운행 동안 차량의 언더바디를 도시한 개략도이다.
도 5는 차량의 조향된 휠 및 비조향된 휠을 도시한 개략도이다.
도 6은 커브 운행 동안 차량의 다양한 궤적들을 나타낸 그래프이다.
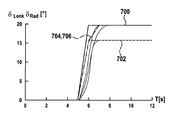
도 7은 커브 운행 동안 다양한 조향 각도들의 곡선들을 나타낸 그래프이다.
도 8은 커브 운행 동안 다양한 휠 수직력들의 곡선들을 나타낸 그래프이다.
도 9는 커브 운행 동안 차량의 속도의 곡선들을 나타낸 그래프이다.
도 10은 커브 운행 동안 차량의 다양한 지점들의 궤적들을 나타낸 그래프이다.
도 11은 커브 운행 동안 원심력의 곡선을 나타낸 그래프이다.
도 12는 본 발명의 일 실시예에 따른 차량의 경사 특성곡선을 나타낸 그래프이다.
도 13은 본 발명의 일 실시예에 따른 조향 가능한 차량의 경사를 방지하기 위한 방법을 나타낸 흐름도이다.
도 2는 본 발명의 일 실시예에 따른 조향 가능한 차량의 경사를 방지하기 위한 방법을 위한 조절 회로를 도시한 블록 회로도이다.
도 3은 본 발명의 일 실시예에 따라서 조향 가능한 차량의 경사를 방지하기 위한 방법을 위한 다차원 조절 회로를 도시한 블록 회로도이다.
도 4는 커브 운행 동안 차량의 언더바디를 도시한 개략도이다.
도 5는 차량의 조향된 휠 및 비조향된 휠을 도시한 개략도이다.
도 6은 커브 운행 동안 차량의 다양한 궤적들을 나타낸 그래프이다.
도 7은 커브 운행 동안 다양한 조향 각도들의 곡선들을 나타낸 그래프이다.
도 8은 커브 운행 동안 다양한 휠 수직력들의 곡선들을 나타낸 그래프이다.
도 9는 커브 운행 동안 차량의 속도의 곡선들을 나타낸 그래프이다.
도 10은 커브 운행 동안 차량의 다양한 지점들의 궤적들을 나타낸 그래프이다.
도 11은 커브 운행 동안 원심력의 곡선을 나타낸 그래프이다.
도 12는 본 발명의 일 실시예에 따른 차량의 경사 특성곡선을 나타낸 그래프이다.
도 13은 본 발명의 일 실시예에 따른 조향 가능한 차량의 경사를 방지하기 위한 방법을 나타낸 흐름도이다.
동일하거나 유사한 부재들은 하기 도면들에서 동일하거나 유사한 도면 부호들로 표시될 수 있다. 또한, 도면들, 실시예 설명, 및 청구범위에는 수많은 특징이 조합해서 포함되어 있다. 당업자에게 자명한 사실은, 상기 특징들이 개별적으로 고려될 수 있거나, 또는 본원에 명시되지 않은 추가의 조합들로 통합될 수 있다는 점이다.
도 1에는, 본 발명의 일 실시예에 따른 차량(100)의 경사를 방지하기 위한 장치(102)를 장착한 차량(100)이 개략도로 도시되어 있다. 차량(100)은 여기서 산업용 트럭(100) 또는 지게차(100)이다. 본원의 장치(102)는 결정하는 유닛(104)과 공급하는 유닛(106)을 포함한다. 차량(100)은 2개의 비조향된 프런트 휠(108)과 하나의 조향된 리어 휠(110)을 포함한다. 프런트 휠들(108)은 여기서 구동 모터(112)와 연결된다. 리어 휠(110)은 조향 구동장치(114)를 통해 조향될 수 있다. 조향 구동장치(114)는 리어 휠(110)의 조향 각도에 대한 설정값을 나타내는 조향 신호를 통해 제어된다. 조향 신호는 차량(100)의 스티어링 휠 상의 조향 신호 발생기(116)로부터 공급된다. 구동 모터(112)는 차량(100)의 속도를 나타내는 속도 신호를 공급한다. 결정하는 유닛(104)은 조향 신호 발생기(116) 및 구동 모터(112)와 연결된다. 결정하는 유닛(104)은, 차량(100)의 조향 각도 및 속도를 사용해서 경사 기준을 결정하도록 형성된다. 공급하는 유닛(106)은, 경사 기준이 차량(100)에 대한 경사 위험을 나타내면, 조향 각도를 위한 보정 신호를 공급하도록 형성된다. 보정 신호는, 조향 신호를 보정하도록 형성된다. 보정 신호를 통해, 리어 휠의 더 작은 변위에 대한 조향 신호가 보정된다. 보정 신호는 조향 신호 발생기와 조향 구동장치 사이에 배치된 혼합기(118)에서 조향 신호와 혼합된다. 차량(100)이 운전자의 조향 입력값을 통해 경사 임계의 운행 상태에 있을 수도 있다면, 조향 신호에서 나타나는 조향 입력값은 보정 신호를 통해 보정되고 차량(100)은 운전자에 의해 사전 설정된 것보다 더 큰 커브 반경으로 조향된다. 그 결과, 차량(100)은 안정된 운행 상태로 유지된다.
본원에서 제안되는 접근법은, 산업용 트럭(100)의 경사 안정적인 작동을 보장하기 위해, 운전자 개입의 제한을 기반으로 한다. 달리 말하면, 지게차(100)를 위한 경사 방지 시스템(anti-tilting system)이 제안된다.
지게차(100)는 오늘날 공장 내 운반 영역에서 보조 수단으로서 널리 보급되었다. 그러나 지게차는 한편으로 협폭의 윤간 거리 및 높은 무게중심 위치로 인해 경사에 매우 불안정하고 다른 한편으로는 보통 제대로 훈련받지 않은 직원에 의해 운행되기 때문에, 경사 사고의 횟수는 그 보급과 동일한 정도로 증가하였다. 이런 이유에서, 지게차의 경사 안정성을 높이기 위한 안전 시스템이 제안된다.
도 2에는, 본 발명의 일 실시예에 따른 조향 가능한 차량(100)의 경사를 방지하기 위한 방법을 위한 조절 회로(200)의 블록 회로도가 도시되어 있다. 경사를 방지하기 위한 장치(102)는 조절 회로(200)의 조절기(202)(closed-loop controller)를 나타낸다. 조절기(202)는 경사 방지 시스템(202)이라고 할 수 있다. 장치(102)는 실질적으로 도 1의 장치에 상응한다. 차량(100)은 조절 회로(200)의 조절 대상(204)을 나타낸다. 조향 각도 설정값(206)은 조절 회로(200)의 기준 변수(206)를 나타낸다. 본원의 장치(102)는 제어 변수(208)로서 보정 신호(208)를 출력한다. 조향 각도 설정값(206)은 혼합기(118) 내에서 보정 신호(208)와 혼합되어 보정된 조향 각도 설정값(210)을 형성한다. 보정된 조향 각도 설정값(210)은 차량(100) 또는 조절 대상(204)을 위한 입력 변수(210)이다. 차량(100)에서는 조향 가능한 휠들의 조향 각도(212)가 검출되어 조절기(202)로 공급된다. 마찬가지로, 차량(100)의 수직축을 중심으로 하는 요 레이트(214) 또는 회전속도(214)도 검출되어 조절기(202)로 공급된다. 그 밖에도, 차량(100)의 속도(216)도 검출되어 조절기(202)로 공급된다.
일 실시예에서, 본원의 장치(102) 또는 조절기(202)는, 경사 위험시 차량(100)의 속도(216)를 감속하기 위해, 추가 제어 변수(218)로서 차량을 위한 제동 신호(218)를 공급한다.
도 2에는, 경사 방지 시스템(102)의 구조의 일 실시예가 도시되어 있다. 경사 방지 시스템(102)은 입력 변수들로서 요 레이트(214)와, 휠 조향 각도(212)와, 속도(216)를 포함한다. 이 경우, 요 레이트(214)는 차량(100)의 수직축을 중심으로 한 회전속도이며 센서에 의해 측정될 수 있다. 휠 조향 각도(212)는 내연기관형 지게차(100)의 경우 센서를 통해 검출될 수 있고, 전동형 지게차(100)의 경우 휠 조향 각도(212)는 전기 모터 변수들의 계산을 통해 획득될 수 있다. 속도(216)는 계산을 통해, 또는 센서에 의한 측정을 통해 공급될 수 있다. 경사 방지 시스템(102)은 제어 변수들로서 속도 감속(218)을 위한 가능성 및 조향 개입(208)을 포함한다. 이 경우, 속도 감속(218)은 모터 및/또는 변속기 및/또는 제동 개입부들로 이루어진 차량(100)의 파워 트레인을 통해 수행될 수 있다. 조향 개입(208)은, 순수 전기식, 전기 기계식(예: 중첩 조향 장치), 또는 전기 유압식 중첩 조향 장치를 통해, 또는 (스티어-바이-와이어 조향 장치의 경우) 운전자 입력값의 조작을 통해 수행될 수 있다. 각각의 변형예에 따라서, 운전자의 조향 신호(206)는 전기적으로, 또는 이미 액추에이터 시스템의 제어 장치 내에서 조작되거나, 또는 기계적으로 보상된다.
마이크로 컴퓨터를 포함하는, 차량의 추가 제어 장치(202)는 본원에서 기술되는 알고리즘으로 프로그래밍된다. 필요한 신호들, 즉 속도(216), 요 레이트(214) 및 조향 각도(212)는 적합한 형태로 상응하는 인터페이스를 통해 상기 제어 장치(202)로 제공된다. 이로부터 기술한 알고리즘에 의해 경사 위험이 있는 기동이 식별되고, 바람직한 경사 방지 개입은, 적합한 인터페이스를 통해 사용되는 액추에이터 시스템으로 전송되는 속도 감속(218) 및 조향 조작(208)의 의미에서 계산된다. 이 경우, 알고리즘에서 사용되는 경사 한계(K)는, 적용 매개변수로서, "최대 안전성" 한계와 "최대 운행 민첩성" 한계 사이에서 임의로 설정된다.
도 3에는, 본 발명의 일 실시예에 따른 조향 가능한 차량(100)의 경사를 방지하기 위한 방법을 위한 다차원 조절 회로(200)의 블록 회로도가 도시되어 있다. 조절 회로(200)는 실질적으로 도 2의 조절 회로에 상응한다. 속도(218)에 추가로, 여기서는 차량(100)의 모든 수직축을 중심으로, 또는 모든 공간 방향에서 가속도들(300)이 검출되어 조절기(202)로 공급된다. 그 밖에도, 차량(100)의 모든 수직축을 중심으로, 또는 모든 공간 방향에서 회전속도들(214)이 검출되어 조절기(202)로 공급된다.
경사진 평면에 적합한 경사 방지 시스템(102)의 구조는 도 3에 도시되어 있다. 도 2에서처럼 수직축을 중심으로 한 요 레이트 대신, 여기서는 3개의 모든 공간 방향에서의 요 레이트들(214) 및 가속도들(300)이 경사 방지 개입의 계산을 위해 사용된다. 경사 방지 시스템(102)은, 입력 변수들로서, 3개의 모든 공간 방향에서의 요 레이트들(214), 3개의 모든 공간 방향에서의 가속도들(300), 휠 조향 각도(212), 및 속도(216)를 포함한다. 제어 변수들로서 경사 방지 시스템(102)은 도 2에서처럼 속도 감속(218) 및 조향 개입(208)을 포함한다.
속도(v) 및 요 레이트[d(ψ)/dt]의 측정을 통해, 방정식(9)에 따라서, 사이드 슬립 각도(β)에 대해 속도 방향이 롤링 3방향도(rolling three-sided figure)(β=γ) 상에 수직으로 위치하는 최악 조건(worst case)이 가정되고 사이드 슬립 각도 비율[d(β)/dt]에 대해서는 이동된 운행 기동에서 실제로 결정된 최댓값 또는 경험값이 평가됨으로써, 경사 임계성에 대한 추정이 수행된다. 이 경우, 안정성 한계가 K = 1이거나, 또는 추가의 안전성을 위해 1 미만의 값이 초과된다면, 도시된 모델에 따라서 적합한 최적화 방법을 통해 조향 각도 및 속도는, 경사 한계가 하회될 때까지 변동된다. 이를 위해, 모델이 주기적으로 시뮬레이션되며, 그리고 개입 변수들은 적합한 품질 함수를 통해, 한편으로 경사 한계가 하회되고 이와 동시에 실질적인 운전자 요구는 최소로만 변동될 때까지 가변된다.
확장으로서, 경사 임계의 기동이 식별될 때, 방정식(9)이 실제 시점을 위해 계산될 뿐 아니라, 결정된 앞서 존재하는 시간 범위, 즉 이른바 예측 범위에 대한 모델에 의해 향후에 대해 예측된다. 그 결과, 경사 임계의 상황들이 보다 이른 시점에 식별될 수 있으며, 그럼으로써 상기 추가적인 시간 이득의 결과로 다시 운전자 설정값에 대한 개입은 좀 더 덜 강하게 제공된다. 또한, 그 결과로, 전륜 조향식 차량에 비해 후륜 조향식 차량의 특별한 횡방향 동적 특성이 고려된다. 도 10 및 도 11에, 예시로서 차량의 커브 운행에 따른 2가지 실질적인 현상이 도시되어 있다.
도 4에는, 커브 운행 동안 차량의 언더바디(400)가 개략도로 도시되어 있다. 여기서 차량은 2개의 조향된 휠(110)과 2개의 비조향된 휠(108)을 포함한다. 비조향된 휠들(108)은 도 1의 차량의 경우처럼 비현가(unsuspended) 방식으로 차량과 연결된다. 조향된 휠들(110)은 강성의 스윙 차축(402)을 통해 서로 연결된다. 스윙 차축(402)은 스윙 조인트(404)를 통해 차량과 연결된다. 또한, 그 결과, 지면이 평탄하지 않을 때에도 4개의 휠(108, 110) 모두가 지면에 접촉한다. 비조향된 휠들(108)의 영역에서 지반의 경사 위치는 차량으로 직접 전달된다. 비조향된 휠들(108) 중 각각의 비조향된 휠과 스윙 조인트(404) 사이에는 차량의 경사 축(406)이 각각 도시되어 있다. 정지한 차량의 무게중심(408)이 경사 축들(406)과 비조향된 휠들(108) 사이의 연결선에 의해 형성된 삼각형 위에 위치하면, 차량은 안전하게 정지한다. 무게중심(408)이 삼각형 외부에 위치하면, 차량은 경사 축들(406) 중 하나의 경사 축을 넘어, 또는 연결선을 넘어 기울어지기 시작한다. 차량이 커브를 이동하면, 관성력 및/또는 원심력이 차량 상에 작용한다. 단순화된 고려의 경우, 상기 힘들은 무게중심(408)에 작용한다. 최악의 경우, 상기 힘들은 경사 라인들(406) 중 하나의 경사 라인에 대해 수직으로 작용하는데, 그 이유는 그 경우 무게중심(408)과 경사 라인(406) 사이의 간격이 가장 작기 때문이다. 그에 따라 바람직하지 않은 레버 비율(lever ratio)이 작용하는데, 그 이유는 이 경우 차량의 안정화 중량에 대한 레버 길이가 최소이기 때문이다. 관성력 및/또는 원심력과 경사 라인(406)까지 그 작용점의 간격의 곱이 중량과 경사 라인(406)과 무게중심(408) 사이의 간격의 곱보다 더 크다면, 차량은 기울어지기 시작한다.
복원 모멘트(MStand)의 경우 lhsinγ의 레버 암이 작용하며, 그에 따라 식은 하기와 같다.

원심 가속도로 인해, 경사 모멘트(MKipp1)는 상태 삼각형(state triangle)에 대해 수직인 힘으로 좌측 방향뿐 아니라 우측 방향에 대해서도 값에 따라 작용한다.
지게차 질량의 관성으로부터 추가의 경사 모멘트 성분(MKipp2)이 발생한다.
따라서 마지막으로 복원 모멘트에 대한 경사 모멘트의 비율(K)에 대해 하기 식이 적용된다.

이제 상기 모델에 따라서, 상이한 속도들에 대해 후진 조향 상태로 또는 후진 조향 없이 스텝 조향(step steer)이 시뮬레이션되고, 요구되는 K = 1의 모멘트 비율이 정확하게 설정될 때까지 조향 각도가 가변됨으로써, 조향 각도와 속도 사이의 관계가 분석되면, 경사 한계에 대해 예리한 특성곡선이 결정된다. 도 12에, 경사 한계의 곡선이 도시되어 있다.
도 5에는, 차량의 하나의 조향된 휠(110) 및 하나의 비조향된 휠(108)이 개략적으로 도시되어 있다. 2개의 휠(108, 110)은 실질적으로 도 4의 언더바디의 일측 면에 상응한다. 두 휠(108, 110)은 커브 운행 중의 상태로 도시되어 있다. 이 경우, 비조향된 휠(108)은 프런트 휠(108)이다. 조향된 휠(110)은 여기서 리어 휠(110)이면서 커브 진입 조향된다. 다시 말해 이에 속하는 차량은 여기서는 후륜 조향식이다. 후륜 조향식 차량의 경우, 커브로 이동할 때, 후미가 궤적에서 이탈된다. 커브 운행 동안, 차량은 순간 중심(500)을 중심으로 회전한다. 순간 중심(500)은 여기에는 도시되지 않은 2개의 보조 선의 교차점에 위치된다. 제 1 보조 선은 프런트 휠(108)의 접촉점을 통과하고 프런트 휠(108)의 순간 이동 방향에 대해 수직을 이룬다. 제 2 보조 선은 리어 휠(110)의 접촉점을 통과하고 리어 휠(110)의 순간 이동 방향에 대해 수직을 이룬다. 차량의 모든 지점은 마찬가지로 순간 중심(500)을 통과하여 연장되는 추가 보조 선들에 대해 수직으로 이동된다. 따라서 차량의 무게중심(408)도 여기에 표시된 보조 선(502)에 대해 수직으로 이동된다. 순간 중심(500)을 중심으로 하는 차량의 회전을 통해, 무게중심(408)에서 원심 가속도는 이동 방향에 대해 수직으로, 다시 말하면 보조 선(502)의 방향으로 작용한다. 여기에 도시된 두 휠(108, 110)은 실제의 휠들로서 도시되어 있다. 그러므로 휠들(108, 110)은 원심 가속도로 인해 측면으로 구부러지며, 그럼으로써 휠들(108, 110)은 언더바디에 의해 사전 설정된 각도에 대해 각도(알파)만큼 경사져서 롤링한다. 순간 중심(500)은 실제 이동 방향들에 의해 정의된다.
후륜 조향식 산업용 트럭의 실질적인 운행 동적 거동은 도 5에서와 같은 단일 궤적 모델(single-track model)에 의해 충분히 기술되며, 이 단일 궤적 모델에서는 3개의 동적 방정식 (1) 내지 (3)이 주어진다.

여기서는 상세 내용은 다루어지지 않지만, 시스템 변수들에 따라서 경사 거동은 매우 충분히 기술된다. 요 레이트[d(ψ)/dt]와 사이드 슬립 각도 비율[d(β)/dt]의 합으로부터, 순간 중심(500)을 중심으로 반경(r)을 갖는 원심 가속도(aZF)가 구해진다.

원심 가속도로부터, 롤 축(roll axis)을 중심으로 하는 경사 모멘트가 주어진다. 산업용 트럭의 뒤 차축은, 운행 표면의 비평면성을 보상할 수 있도록 하기 위해, 보통 스윙 조인트를 통해 바디 구조 상에 장착된다. 따라서 두 프런트 휠(108) 및 스윙 조인트는 상태 삼각형을 형성하며, 그럼으로써 프런트 휠들(108)의 수직력들만이 지게차의 경사를 막을 수 있다. 도 4에 따라서는, 유효하게 작용하는 경사력과 경사 및 복원 모멘트의 레버 암들이 결정된다.
도 6에는, 커브 운행 동안 차량의 다양한 궤적들(600, 602, 604, 606)이 도시되어 있다. 궤적들(600, 602, 604, 606)은 그래프에 도시되어 있다. 그래프의 가로좌표는 미터 단위의 거리(X)를 나타낸다. 세로좌표에도 마찬가지로 미터 단위의 거리(Y)가 표시되어 있다. 모든 궤적(600, 602, 604, 606)은, 25m의 X 값까지 가로좌표에 평행하게 연장되는 직선 구간으로 개시된다. 25m에서 커브 운행들이 개시된다. 이 경우, 제 1 궤적(600)은 20°의 일정한 휠 조향 각도를 나타낸다. 제 2 궤적(602)은 16°의 일정한 휠 조향 각도를 나타낸다. 제 3 궤적(604)은, 본원에서 제안되는 접근법에 따라서 차량의 경사를 방지하기 위한 장치를 통해 설정될 수 있는 것과 같은, 16°와 20° 사이에서 가변하는 휠 조향 각도를 나타낸다. 제 4 궤적(606)은 16°와 20° 사이에서 가변하는 휠 조향 각도를 나타내며, 차량은 본원에서 제안되는 접근법에 따라 커브 운행을 시작할 때 추가로 제동된다. 이 경우, 제 4 궤적(606)은 제 1 궤적(600)과 가장 최소한도로 차이를 나타낸다. 다른 궤적들(602, 604)은 제 1 궤적(600)과의 다소 차이를 나타낸다. 제 2 궤적(602)은 제1 궤적(600)보다 훨씬 더 먼 커브를 나타낸다. 제 3 궤적(604)은 우선 제 2 궤적(602)을 따르지만, 그 다음 20°의 휠 조향 각도로 인해 제 1 궤적(602)보다 그 커브가 더 급해진다. 그 결과, 차량은 종국에 상대적으로 더 급한 커브로 이동하게 된다.
도 7에는, 커브 운행 동안 다양한 휠 조향 각도들의 곡선들(700, 702, 704, 706)이 도시되어 있다. 곡선들(700, 702, 704, 706)은 그래프에 도시되어 있다. 그래프의 가로좌표 상에는 초 단위의 시간(T)이 표시되어 있다. 그래프의 세로좌표 상에는 도 단위의 조향 각도가 표시되어 있다. 제 1 곡선(70)은 20°의 휠 조향 각도를 나타내고, 도 6의 제 1 궤적에 상응한다. 제 2 곡선(702)은 16°의 조향 각도를 나타내고, 도 6의 제 2 궤적에 상응한다. 제 3 곡선(704)은 본원에서 제안되는 접근법에 따라서 16°와 20° 사이에서 가변하는 휠 조향 각도를 나타내고, 도 6의 제 3 궤적에 상응한다. 제 4 곡선(706)은 본원에서 제안되는 접근법에 따라서 16°와 20° 사이에서 가변하는 휠 조향 각도를 나타내고, 도 6의 제 4 궤적에 상응한다. 곡선들(700, 702, 704, 706)은 모두 0°의 각도에서 개시된다. 5초에서 제 1 곡선(70)은 20°로 급하게 상승한다. 20°는 ½초 미만의 시간 이내에 도달된다. 제 2 곡선(702)은 상대적으로 더 평평한 기울기로 ½초 미만의 시간 이내에 16°로 상승한다. 제 3 곡선(704)은 제 2 곡선(702)과 동일하게 평평한 기울기로 ½초 미만의 시간 이내에 16°로 상승하고, 그 다음 계속하여 평평해진 기울기로 ½초 이내에 20°로 상승한다. 제 4 곡선(706)은 제 3 곡선(704)에 상응한다. 곡선들(700, 702, 704, 706)이 자신들의 최종적인 각도에 도달하면, 상기 곡선들(700, 702, 704, 706)은 상기 최종 각도에서 일정하게 유지된다.
도 8에는, 차량의 커브 운행 동안 다양한 휠 수직력들의 곡선들(800, 802, 804, 806)이 도시되어 있다. 곡선들(800, 802, 804, 806)은 그래프에 도시되어 있다. 그래프의 가로좌표 상에는 초 단위의 시간(T)이 표시되어 있다. 시간(T)은 도 7에 도시된 시간에 상응한다. 그래프의 세로좌표 상에는 킬로 뉴턴 단위의 휠 수직력이 표시되어 있다. 휠 수직력은 각각 차량의 커브 안쪽 휠에서의 휠 수직력이다. 도 7에서처럼, 제 1 곡선(800)은 조향 각도가 20°일 때 커브 운행을 나타낸다. 제 2 곡선(802)은 조향 각도가 16°일 때 커브 운행을 나타낸다. 제 3 곡선(804)은 16° 내지 20°의 가변 조향 각도의 조건에서 본원에서 제안되는 접근법에 따른 커브 운행을 나타낸다. 제 4 곡선(806)은 마찬가지로 16° 내지 20°의 가변 조향 각도의 조건에서 본원에서 제안되는 접근법에 따른 커브 운행을 나타내며, 여기서는 차량이 추가로 제동된다.
곧바로 커브 진입 조향에 이어서, 모든 곡선(800, 802, 804, 806)에서 휠 수직력은 빠르게 감소한다. 20°의 휠 조향 각도를 갖는 제동되지 않은 커브 진입 조향(800)의 경우, 휠 수직력은 0 kN까지로 감소한다. 다시 말하면, 커브 안쪽 휠이 들린다. 그런 후에, 커브 안쪽 휠은 수회 지면에 접촉하며, 이때 휠 수직력은 단기간에 다시 증가하지만, 그러나 다시 영(0)으로 떨어진다. 16°의 휠 조향 각도를 갖는 제동되지 않는 커브 진입 조향(802)의 경우, 휠 수직력은 약간 상대적으로 더 느리게 감소하며, 약 1kN에서 일정하게 유지된다. 다시 말해 커브 안쪽 휠은 들리지 않는다. 조향 각도가 16°로 개시되어 이어서 20°로 계속 상승하는, 제동되지 않는 커브 진입 조향(804)의 경우에도, 마찬가지로 휠 수직력은 20°를 갖는 제동되지 않는 커브 진입 조향(800)의 경우보다 더 느리게 감소한다. 그러나 이 경우 휠 수직력은 마찬가지로 0 kN으로 감소한다. 다시 말해 커브 안쪽 휠은 여기서도 들린다. 본원에서 제안되는 접근법에 따라서 제동되는 커브 진입 조향(806)의 경우, 휠 수직력은 약 4 kN으로 감소하며, 그리고 휠 수직력의 작은 편차를 나타내면서 상기 4kN에서 유지된다. 다시 말해, 커브 안쪽 휠이 여기서는 들리지 않는다.
도 9에는, 커브 운행 동안 차량의 속도의 곡선들(900, 902, 904, 906)이 도시되어 있다. 곡선들(900, 902, 904, 906)은 그래프에 도시되어 있다. 그래프의 가로좌표 상에 초 단위의 시간(T)이 표시되어 있다. 그래프의 세로좌표 상에는 초당 미터 단위의 속도가 표시되어 있다. 가로좌표의 시간은 도 7, 도 8 및 도 9에서의 시간에 상응한다. 제 1 곡선(900)은 20°의 휠 조향 각도를 갖는 커브 진입 조향을 나타낸다. 제 2 곡선(902)은 16°의 휠 조향 각도를 갖는 커브 진입 조향을 나타낸다. 제 3 곡선(904)은 16°와 20° 사이에서 가변하는 휠 조향 각도를 갖는 커브 진입 조향을 나타낸다. 제 4 곡선(906)은 본원에서 제안되는 접근법에 따라서 추가적인 감속이 이루어지면서 16°와 20° 사이에서 가변하는 휠 조향 각도를 갖는 커브 진입 조향을 나타낸다. 곡선들(900, 902, 904, 906)은 커브 진입 조향을 개시할 때까지 함께 연장된다. 커브 진입 조향은 초당 거의 5미터의 속도에서 개시된다. 20°의 휠 조향 각도를 갖는 커브 진입 조향(900)의 경우, 속도는 우선 일정하게 유지된다. 차량의 강하게 커브 진입 조향되는 리어 휠들로 인해, 차량은 초당 약 ½미터만큼 미미하게 제동된다. 16°의 휠 조향 각도를 갖는 커브 진입 조향(902)의 경우, 속도는 변함없이 일정하게 유지되고 감속되지 않는다. 16°와 20° 사이에서 가변하는 휠 조향 각도를 갖는 제동되지 않는 커브 진입 조향(904)의 경우, 차량의 속도는 우선 일정하게 유지되고 이어서 급하게 커브 진입 조향되는 리어 휠들을 통해 마찬가지로 초당 약 ½미터만큼 미미하게 감속된다. 16°와 20° 사이에서 가변하는 조향 각도를 갖는 제동되는 커브 진입 조향(906)의 경우, 속도는 커브 진입 조향 직후에 차량의 제어되는 제동을 통해 약 1½ m/s만큼 감속된다. 이어서 속도는 다시 초당 약 ½미터만큼 상승하고 그 다음 약 4 m/s에서 일정하게 유지된다.
또한, 최대 안전성 이득이 설정값들의 변화량이 최소인 조건에서 달성되는 방식으로, 운전자의 조향 및 속도 설정값을 조작하는 시스템도 제안된다. 보조 시스템을 위한 측정 변수들 또는 입력 변수들은, 속도, 요 레이트, 리어 휠들의 휠 조향 각도이다. 추가로, 양호한 근사로 운행 표면 기울기에 상응하며 각각 3개의 모든 공간 방향에서의 요 레이트들 및 가속도들로부터 결정되는 차량 기울기는 제어 개입들의 계산 시에 고려될 수 있다. 비록, 운전자가 조향 장치에 개입하는 시스템을 통해 통제를 받을 수도 있고 지게차는 운전자가 사전 설정한 것과 다른 방향으로 이동할 수도 있다는 가정에 수긍이 가기는 하지만, 그 대신에, 이는, 운전자가 위험한 임계의 개입으로부터 보호되도록 수행된다. 지게차의 유압식 조향 장치로 인해, 운전자는, 대개 예컨대 자동차로부터 기계적으로 지속되는 조향 칼럼으로 익숙해져 있는 것처럼, 복원 모멘트의 형태로 어떠한 운행 동적 피드백도 받지 않으며, 그럼으로써 운전자는 임계의 상황들에서 비록 자신에게 작용하는 가속도를 느끼기는 하지만, 변함없이 수월하게 조향을 수행할 수 있다.
그러므로 개입의 처음 순간에, 시스템은, 운전자에 의해 사전 설정된 커브 반경보다 약간 더 큰 커브 반경으로 단기간에 차량을 강제한다. 각각의 실시예에 따라서, 파워 트레인 또는 기계식 브레이크들의 동적 거동으로 인해, 조향처럼 빠르게 변동될 수 없는 속도에 대한 추가적인 개입을 통해, 지게차는 약간 제동된다. 그러나 속도의 상기 감속 중에, 운전자 조향 설정값의 조작은 다시 일부분 취소되며, 그럼으로써 종국에 최초의 궤적으로 커브 진입 조향이 수행될 수 있다. 상기 두 개입의 조합을 통해 비로소, 운전자가 최초 목표했고 시스템의 비-개입 시 불가피하게 차량의 경사를 야기할 수도 있었던 급한 커브 반경으로 이동할 수 있게 된다. 이를 명확하게 하기 위해, 도 6 내지 도 9에는, 후륜 조향식 차량 모델을 이용하여 시뮬레이션한 경사 임계의 기동의 결과들이 도시되어 있다. 도 6에는, 이동한 궤적이 도시되어 있다. 라인(600)은 도 7의 휠 조향 각도의 곡선 및 도 9의 속도의 곡선에서 알 수 있는 것과 같은 최초의 운전자 요구를 나타낸다. 그 외에, 도 8에서 분명하게 알 수 있듯이, 커브 안쪽 휠은 이 경우 완전하게 하중 경감되고 몇 번이고 되풀이하여 짧게 지면에 접촉하며("스틱-슬립 효과"), 다시 말하면 그 결과로 매우 경사 임계적인 기동이 나타난다. 이런 기동에서 조향 각도가 곡선(602)에서처럼 16°로 제한되거나, 또는 먼저 짧게 제한되고 이어서 감속되어 곡선(604)에서처럼 20°의 최초 조향 각도가 릴리스된다면, 기동이 비록 경사 임계에서 완화되기는 하지만, 운전자의 최초 목표하던 궤적(600)은 유지되지 않는다. 추가로 여전히 속도가 감속될 때 비로소, 차량은 거의 곡선(606)에 도시된 것과 같은 최초 목표하던 궤적으로 이동할 수 있다. 본원에서 제안되는 접근법은 경사에 대해 훨씬 더 안전한데, 그 이유는 커브 안쪽 프런트 휠이 전체 기동 동안 도 8의 곡선 파형(806)처럼 잔존하는 휠 수직력을 보유하기 때문이다.
공지된 시스템들에 비해, 본원에서 제안되는 접근법을 통해, 차량의 경사는 방지될 수 있다. 속도 개입의 동적 거동은 경사 과정의 동적 거동보다 훨씬 더 빠르다. 에너지는 차량이 넘어지는 것을 방지할 만큼 충분히 신속하게 차량에서 인출될 수 있다. 그 결과, 거의 절대적인 경사 안전성과 훨씬 더 우수한 운행 민첩성이 제공되는데, 그 이유는 속도의 제한이 훨씬 더 적은 제한으로 수행될 수 있기 때문이다.
도 10에는, 커브 운행 동안 후륜 조향식 차량의 다양한 지점들의 궤적들(1000, 1002)이 도시되어 있다. 도 6에서처럼, 궤적들(1000, 1002)은 그래프에 도시되어 있으며, 이 그래프의 경우 가로좌표 상에 미터 단위의 거리(X)가 표시되어 있고, 세로좌표 상에도 미터 단위의 거리(Y)가 표시되어 있다. 차량은 180° 이상만큼의 커브로 이동한다. 이 경우, 제 1 궤적(1000)은 차량의 앞차축의 중심점의 경로를 나타낸다. 제 2 궤적(1002)은 차량의 무게중심의 경로를 나타낸다. 후륜 조향식 차량의 경우, 차량의 후미는 궤적에서 이탈하기 때문에, 무게중심은 앞차축의 중심점보다 더 큰 커브(1002)를 나타낸다.
도 11에는, 후륜 조향식 차량의 커브 운행 동안 원심 가속도의 곡선(1100)이 도시되어 있다. 곡선(1100)은 그래프에 도시되어 있고 그래프의 가로좌표 상에는 초 단위의 시간(T)이 표시되어 있다. 그래프의 세로좌표 상에는 2개의 변수가 표시되어 있다. 한편으로 그래프의 세로좌표 상에 도 단위의 휠 조향 각도가 표시되어 있고 다른 한편으로는 그래프의 세로좌표 상에 초 제곱(second squared) 당 미터 단위의 원심 가속도가 표시되어 있다. 이 경우, 휠 조향 각도의 영점은 원심 가속도의 영점과 일치한다. 그래프에는 추가로 휠 조향 각도의 곡선(1102)이 도시되어 있다. 조향 각도의 곡선(1100)은 0도에서 개시된다. 1초 후에, 휠 조향 각도는 1초 이내에 30°로 상승하며 그 다음 3초 동안 30°에서 머무르다가 다시 1초 이내에 다시 0도로 감소하고 이어서 0도에서 일정하게 유지된다. 원심 가속도의 곡선(1100)은 휠 조향 각도의 곡선(1102)에 상응한다. 커브 진입 조향의 개시 시점에, 원심 가속도는 약 ½초 동안 포지티브 오버슈트를 나타낸다. 이어서 원심 가속도는 강하게 감소되고 추가의 오버슈트로 초 제곱 당 -2미터의 값에 도달한다. 원심 가속도는 휠 조향 각도의 곡선(1102)에 대해 약간 시간 변이된다. 후진 조향을 개시할 때, 원심 가속도는 다시 네거티브 오버슈트를 나타내며, 그런 후에 원심 가속도는 시간 변이되어 초 제곱 당 0미터까지 상승한다.
커브 진입 조향 과정은 1초에서부터 개시된다. 도 10에 도시된 커브 운행을 실행하기 위해, 운전자는 먼저 1초에서 2초까지 30°의 휠 조향 각도(1102)로 커브 진입 조향한다. 원심 가속도(aZF)(1100)의 값은 2초에서 조향 과정의 종료 후에 그럼에도 계속하여 상승한다. 여기서 예측 범위는, 과도 과정(transient process)에서 개시되고 절댓값으로부터 최대인 원심 가속도(1100)가 경사 임계성의 계산에 영향을 미칠 정도로 길게 선택될 수 있다.
커브에서부터 커브 진출 조향 시에, 운전자는 조향 장치를 5초에서 6초까지 다시 0도로 복원한다. 이 경우, 절댓값으로부터 횡 가속도(1100)의 초과 상승이 나타난다. 특히 경계 영역에서 커브 운행에서 바깥쪽으로 기울어지거나 커브 진출 조향을 예측할 수 없을 경우, 상기 초과 상승은 경사를 야기할 수 있다. 여기서도 예측 범위는 절댓값으로부터 최대인 원심 가속도가 경사 임계성의 계산에 영향을 미칠 정도로 길게 선택될 수 있다.
수평 평면에 대한 상기 고려 사항들은, 예컨대 운행 표면 기울기를 통해 경사진 평면으로 확장된다. 산업용 트럭은 통상 현가되지 않는 언더바디를 구비하고 있기 때문에, 차량 기울기는 양호한 근사로 운행 표면 기울기에 상응한다. 상기 차량 기울기는 실시간으로 그리고 온라인으로 각각 3개의 모든 공간 방향에서의 가속도들 및 요 레이트들로부터 결정될 수 있고, 안정화하는 제어 개입들의 계산 또는 경사 위험의 정량화 동안 고려될 수 있다.
도 12에는, 본 발명의 일 실시예에 따른 차량의 경사 특성곡선(1200)이 도시되어 있다. 경사 특성곡선(1200)은 그래프에 도시되어 있으며, 그래프의 가로좌표 상에는 초당 미터 단위의 속도가 표시되어 있다. 그래프의 세로좌표 상에는 도 단위의 휠 조향 각도가 표시되어 있다. 경사 특성곡선(1200)은 각각 차량의 실제 운행 속도에서 경사 위험이 존재하지 않는 최대 가능한 휠 조향 각도를 나타낸다. 각각의 속도에서 상대적으로 더 높은 휠 조향 각도가 선택된다면, 차량은 경사 임계의 영역으로 들어갈 수도 있다. 속도가 더 낮을수록, 가능한 휠 조향 각도는 더 커진다. 초당 약 2½ 미터 미만에서 휠 조향 각도에 대한 제한은 존재하지 않는다.
달리 말하면, 경사 특성곡선(1200) 하부의 면은, 본원에서 제안되는 조향 개입들 및/또는 제동 개입들을 통해 벗어날 수 없는 경사에 대해 더 안전한 영역을 나타낸다.
본원에서 제안되는 시스템의 실현을 위해, 산업용 트럭은 속도 센서 및 휠 조향 각도 센서뿐만 아니라 상응하는 액추에이터 시스템을 필요로 한다. 경사 한계에 대한 상기 특성곡선(1200)은 제어 장치 내에 저장되며, 이 제어 장치는 두 신호를 연속해서 평가하면서 정의된 경사 한계(1200)가 초과되는지의 여부를 검사한다. 만일 경사 한계가 초과되는 경우라면, 액추에이터 시스템에 의해, 운전자가 한계 조향 각도를 넘어 조향함으로써 산업용 트럭이 넘어질 수 있는 것이 방지된다. 비록 산업용 트럭이 후륜 조향 및 횡방향으로 위치하는 리어 휠들로 인해 순수 조향 개입을 통해 이미 시스템으로 인해 제동된다고 하더라도, 휠 조향 각도의 제한에 추가해서 차량을 약간 제동할 수 있고, 그럼으로써 운전자는 더욱 신속하게 실제로 요구되는 조향 각도를 조정할 수 있다. 이 경우 이용되는 특성은 경사에 대해 더 안전하면서도 운행은 더 민첩하게 한다는 의미로 임의로 조정될 수 있고 자유롭게 선택될 수 있다.
액추에이터 시스템의 경우, 전기 조향 장치(스티어-바이-와이어)에서부터 전기 유압식 조향 장치를 넘어 조향 칼럼 내에 통합되는 중첩 조향 장치에 이르기까지 다양한 변형예들이 가능하다. 각각의 변형예에 따라서, 운전자의 조향 신호는 전기적으로 제한되거나 기계적으로 보상된다.
일 실시예에 따라, 산업용 트럭에 통상적인 유압 조향 장치 내에 정상의 경우 유압 밸브들에 의해 차단되는 단락 구간이 내장되는, 매우 간단하면서도 경제적인 바이패스 해결 방안이 제안된다. 이제 작동 동안 상술한 특성곡선이 초과되고 휠 조향 각도가 더 증가하지 않아야 한다면, 밸브들이 개방되고 오일 체적 유량은 유압 조향 유닛을 스쳐 통과된다. 말하자면 운전자가 정상적으로 계속하여 조향할 수 있지만, 휠 조향 각도는 더 증가하지 않는다. 특성곡선(1200)을 하회할 때야 비로소, 상기 밸브들은 다시 폐쇄되고 휠 조향 각도도 더 증가할 수 있다. 그러나 이런 변형에의 경우, 스티어링 휠 각도와 휠 조향 각도 사이의 동기성은 불가피하게 사라지지만, 이는 유압 조향 장치 내에서 오일 누출 유량으로 인해 일반적으로 제한적으로만 제공된다.
상기 실시예에서의 시스템은 특성곡선을 기반으로 한다. 다시 말해 운행 거동에서 동적 특성들은 고려되지 않는다. "속도에 걸친 한계 조향 각도" 특성곡선(1200)의 설계 및 매개변수화와, 그에 대응하는 감속 개입을 통해, 시스템은 상이하게 설정될 수 있다. 예컨대 설계에서 경사 모멘트와 복원 모멘트 사이의 경사 비율(K)이 1 미만으로 정의되고 이와 동시에 감속 개입이 증가한다면, 경사 임계의 운행 기동의 대부분을 방지할 수 있는 추가적인 안전성이 제공된다.
또한, 휠 조향 각도를 속도에 따라서 제한하는 시스템이 제안된다. 비록, 운전자가 상기 시스템을 통해 너무 강하게 제한되고 이런 제한은 허용되지 않을 수도 있다는 가정에 수긍이 가기는 하지만, 실제로는 속도에 따라서, 산업용 트럭의 경사를 야기하지 않으면서 여전히 이동될 수 있는 최소의 커브 반경이 주어진다. 이와 반대로, 운전자가 훨씬 더 좁은 반경으로 운행한다면, 다시 말해 훨씬 더 강하게 커브 진입 조향한다면, 이는 산업용 트럭을 넘어지게 할 수도 있으며, 다시 말하면 시스템은 운전자로 하여금 운전자가 실제로 조향하는 것보다 더 큰 커브 반경으로 조향하게 하는데, 그 이유는 더 좁은 반경은 이동될 수 없고, 개입을 통해 운전자가 보호되는 경사를 불가피하게 야기할 수도 있기 때문이다. 이와 동시에 산업용 트럭이 제동된다면, 제한은 일부분 취소될 수 있고, 그럼에도 운전자는, 최초 자신에 의해 조향된 좁은 커브 반경으로 이동하기 위해, 자신의 휠 조향 각도를 조정할 수 있다.
그 결과, 공지된 시스템들에 비해 훨씬 더 동적인 운행 민첩성이 주어지는데, 그 이유는 속도의 제한이 훨씬 더 적은 제한으로 수행될 수 있고 이와 동시에 동적 운행 기동에서 훨씬 더 큰 경사 안전성이 제공되기 때문이다.
시스템의 검사를 위해, 상응하는 산업용 트럭 또는 지게차에는 속도 센서, 휠 조향 각도 센서 및 스티어링 휠 각도 센서가 장착될 수 있다. 다양한 기동들에서, 상기 센서들의 신호들이 기록될 수 있다. 따라서 스티어링 휠 각도와 비교한 휠 조향 각도 곡선에서 본원에서 제안되는 제한 또는 변동은 간단하게 검사될 수 있다.
도 13에는, 본 발명의 일 실시예에 따라서 조향 가능한 차량의 경사를 방지하기 위한 방법(1300)의 흐름도가 도시되어 있다. 상기 방법(1300)은 결정하는 단계(1302)와 공급하는 단계(1304)를 포함한다. 결정하는 단계(1302)에서, 경사 기준은 차량의 조향 각도 및 속도를 사용해서 결정된다. 공급하는 단계(1304)에서는, 경사 기준이 차량에 대한 경사 위험을 나타내면, 조향 각도를 위한 보정 신호가 공급된다. 보정 신호는, 경사를 방지하기 위해, 조향 각도보다 차량의 하나 이상의 조향 가능한 휠의 더 작은 변위를 나타낸다. 상대적으로 더 작은 변위를 통해, 차량의 원심 가속도는 조향 각도에 의해 사전 설정된 커브 반경에 비해 감소한다.
본원에서 제안되는 접근법을 통해, 산업용 트럭, 예컨대 지게차가 넘어지는 것이 방지된다. 이를 위해, 경사 위험이 검출될 경우 조향 각도가 제한된다. 조향 각도가 운전자 요구에 따라서 제한되는 조향 각도를 상회한다면, 속도도 감속된다. 속도 감소에 상응하게, 조향 각도 제한은, 운전자에 의해 목표되는 조향 각도가 달성될 때까지 동적으로 취소될 수 있다. 따라서 분명히 개선된 경사 안전성이 제공되며 이와 동시에 운행 민첩성도 분명히 개선된다.
도시된 실시예들은 예시로서만 선택되어 있으며 상호 간에 조합될 수 있다.
100 차량, 산업용 트럭, 지게차
102 경사를 방지하기 위한 장치
104 결정하는 유닛
106 공급하는 유닛
108 비조향된 휠
110 조향된 휠
112 구동 모터
114 조향 장치
116 조향 각도 센서
118 혼합기
200 조절 회로
202 조절기
204 조절 대상
206 기준 변수
208 보정 신호
210 조향 각도 설정값
212 조향 각도
214 요 레이트
216 속도
218 제동 신호
300 가속도
400 언더바디
402 스윙 차축
404 스윙 조인트
406 경사 축
408 무게중심
500 순간 중심
502 보조 선
600 20°의 궤적
602 16°의 궤적
604 16° 내지 20°의 궤적
606 제동 조건에서 16° 내지 20°의 궤적
700 20°의 조향 각도 곡선
702 16°의 조향 각도 곡선
704 16° 내지 20°의 조향 각도 곡선
706 제동 조건에서 16° 내지 20°의 조향 각도 곡선
800 20°의 휠 수직력 곡선
802 16°의 휠 수직력 곡선
804 16° 내지 20°의 휠 수직력 곡선
806 제동 조건에서 16° 내지 20°의 휠 수직력 곡선
900 20°의 속도 곡선
902 16°의 속도 곡선
904 16° 내지 20°의 속도 곡선
906 제동 조건에서 16° 내지 20°의 속도 곡선
1000 앞차축 중심점의 궤적
1002 무게중심의 궤적
1100 원심 가속도 곡선
1102 조향 각도 곡선
1200 경사 특성곡선
1300 방지하기 위한 방법
1302 결정하는 단계
1304 공급하는 단계
102 경사를 방지하기 위한 장치
104 결정하는 유닛
106 공급하는 유닛
108 비조향된 휠
110 조향된 휠
112 구동 모터
114 조향 장치
116 조향 각도 센서
118 혼합기
200 조절 회로
202 조절기
204 조절 대상
206 기준 변수
208 보정 신호
210 조향 각도 설정값
212 조향 각도
214 요 레이트
216 속도
218 제동 신호
300 가속도
400 언더바디
402 스윙 차축
404 스윙 조인트
406 경사 축
408 무게중심
500 순간 중심
502 보조 선
600 20°의 궤적
602 16°의 궤적
604 16° 내지 20°의 궤적
606 제동 조건에서 16° 내지 20°의 궤적
700 20°의 조향 각도 곡선
702 16°의 조향 각도 곡선
704 16° 내지 20°의 조향 각도 곡선
706 제동 조건에서 16° 내지 20°의 조향 각도 곡선
800 20°의 휠 수직력 곡선
802 16°의 휠 수직력 곡선
804 16° 내지 20°의 휠 수직력 곡선
806 제동 조건에서 16° 내지 20°의 휠 수직력 곡선
900 20°의 속도 곡선
902 16°의 속도 곡선
904 16° 내지 20°의 속도 곡선
906 제동 조건에서 16° 내지 20°의 속도 곡선
1000 앞차축 중심점의 궤적
1002 무게중심의 궤적
1100 원심 가속도 곡선
1102 조향 각도 곡선
1200 경사 특성곡선
1300 방지하기 위한 방법
1302 결정하는 단계
1304 공급하는 단계
Claims (10)
- 조향 가능한 차량, 특히 후륜 조향식 차량(100)의 경사를 방지하기 위한 방법(1300)에 있어서, 상기 방법(1300)은
상기 차량(100)의 조향 각도(206, 212) 및 그 속도(216)를 사용해서 경사 기준을 결정하는 단계(1302)와,
보정 신호(208)가, 경사를 방지하기 위해, 상기 조향 각도(206)보다 상기 차량(100)의 하나 이상의 조향 가능한 휠(110)의 더 작은 변위를 나타내는 조건에서, 상기 경사 기준이 상기 차량(100)에 대한 경사 위험을 나타내면, 상기 조향 각도(206)를 위한 상기 보정 신호(208)를 공급하는 단계(1304)를 포함하는, 조향 가능한 차량의 경사 방지 방법(1300). - 제 1 항에 있어서, 상기 공급하는 단계(1304)에서 그 밖에, 상기 경사 기준이 상기 차량(100)에 대한 경사 위험을 나타내면, 상기 차량(100)의 속도(216)를 감속하기 위한 제동 신호(218)가 공급되는, 조향 가능한 차량의 경사 방지 방법(1300).
- 제 1 항 또는 제 2 항에 있어서, 보정된 조향 각도(210)가 상기 차량(100)의 조향 장치(114)를 위해 공급되는 조건에서, 상기 보정된 조향 각도(210)를 얻기 위해, 조향 각도(206)와 보정 신호(208)를 조합하는 단계를 포함하는 조향 가능한 차량의 경사 방지 방법(1300).
- 제 1 항 내지 제 3 항 중 어느 한 항에 있어서, 상기 결정하는 단계(1302)에서 그 밖에 차량의 요 레이트(214)가 상기 경사 기준을 결정하기 위해 사용되는, 조향 가능한 차량의 경사 방지 방법(1300).
- 제 1 항 내지 제 4 항 중 어느 한 항에 있어서, 상기 결정하는 단계(1302)에서 조향 각도(206)로서 차량에 대한 조향 각도 입력값(206)이 상기 경사 기준을 결정하기 위해 사용되는, 조향 가능한 차량의 경사 방지 방법(1300).
- 제 1 항 내지 제 5 항 중 어느 한 항에 있어서, 상기 결정하는 단계(1302)에서 조향 각도(121)로서 휠(110)의 각도 위치(212)가 상기 경사 기준을 결정하기 위해 사용되는, 조향 가능한 차량의 경사 방지 방법(1300).
- 제 1 항 내지 제 6 항 중 어느 한 항에 있어서, 상기 결정하는 단계(1302)에서 상기 차량(100)의 경사 특성곡선(1200)이 상기 경사 기준을 결정하기 위해 사용되는, 조향 가능한 차량의 경사 방지 방법(1300).
- 제 1 항 내지 제 7 항 중 어느 한 항에 있어서, 상기 결정하는 단계(1302)에서 상기 차량(100)의 측면 차량 기울기가 상기 경사 기준을 결정하기 위해 사용되는, 조향 가능한 차량의 경사 방지 방법(1300).
- 제 1 항 내지 제 8 항 중 어느 한 항에 있어서, 상기 결정하는 단계(1302)에서 하나 이상의 공간 방향에서 상기 차량(100)의 가속도(300)가 상기 경사 기준을 결정하기 위해 사용되는, 조향 가능한 차량의 경사 방지 방법(1300).
- 조향 가능한 차량, 특히 후륜 조향식 차량(100)의 경사를 방지하기 위한 장치(102)에 있어서, 상기 장치(102)는
상기 차량(100)의 조향 각도(206, 212) 및 속도(216)를 사용해서 경사 기준을 결정하기 위한 유닛(104)과,
보정 신호(208)가 상기 조향 각도(206)보다 상기 차량(100)의 하나 이상의 조향 가능한 휠(110)의 더 작은 변위를 나타내는 조건에서, 상기 경사 기준이 상기 차량(100)에 대한 경사 위험을 나타내면, 상기 보정 신호(208)를 공급하도록 형성되는, 상기 조향 각도(206, 212)를 위한 상기 보정 신호(208)를 공급하기 위한 유닛(106)을 포함하는, 조향 가능한 차량의 경사 방지 장치.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014202230.4A DE102014202230A1 (de) | 2014-02-07 | 2014-02-07 | Verfahren und Vorrichtung zum Verhindern eines Kippens eines lenkbaren Fahrzeugs |
| DE102014202230.4 | 2014-02-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20150093615A true KR20150093615A (ko) | 2015-08-18 |
Family
ID=53676771
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150018412A KR20150093615A (ko) | 2014-02-07 | 2015-02-06 | 조향 가능한 차량의 경사 방지 방법 및 장치 |
Country Status (4)
| Country | Link |
|---|---|
| KR (1) | KR20150093615A (ko) |
| CN (1) | CN104828082A (ko) |
| DE (1) | DE102014202230A1 (ko) |
| IN (1) | IN2015DE00315A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190107695A (ko) * | 2017-01-13 | 2019-09-20 | 크라운 이큅먼트 코포레이션 | 고속 전방 틸러 감도 억압 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015118472A1 (de) * | 2015-10-29 | 2017-05-04 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einem Lastteil und einem Antriebsteil |
| DE102016123104A1 (de) * | 2016-11-30 | 2018-05-30 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einer Bremssteuerung |
| CN109693664A (zh) * | 2017-10-23 | 2019-04-30 | 王飞 | 一种防止汽车侧翻系统及控制策略 |
| JP7081117B2 (ja) | 2017-11-06 | 2022-06-07 | いすゞ自動車株式会社 | 操舵制御装置及び操舵制御方法 |
| DE102018213552A1 (de) * | 2018-03-21 | 2019-09-26 | Bayerische Motoren Werke Aktiengesellschaft | Betriebsverfahren, Vorrichtung, sowie korrespondierendes Computerprodukt zum Betreiben eines Fahrzeugs |
| DE102018115043A1 (de) * | 2018-06-22 | 2019-12-24 | Thyssenkrupp Ag | Verfahren zur Ermittlung eines Radumfanges anhand der gemessenen Gierrate |
| CN109625082B (zh) * | 2018-12-14 | 2020-07-28 | 山河机场设备股份有限公司 | 一种用于集装货物装载机的转向控制装置及方法 |
| CN110949370A (zh) * | 2019-03-18 | 2020-04-03 | 长城汽车股份有限公司 | 自动驾驶车辆的安全监测方法、系统及运动控制系统 |
| US11654956B2 (en) * | 2019-12-23 | 2023-05-23 | Robert Bosch Gmbh | Method and system for steering intervention by electronic power steering unit to prevent vehicle rollover or loss of control |
| DE102020003044A1 (de) * | 2020-05-20 | 2021-11-25 | Bomag Gmbh | Baumaschine und verfahren zur erhöhung der standsicherheit einer baumaschine |
| DE102021207263A1 (de) | 2021-07-09 | 2023-01-12 | Volkswagen Aktiengesellschaft | Verfahren und Steuervorrichtung zum Vermeiden eines Kippens eines Kraftfahrzeugs mit Steer-by-Wire Lenkung und Kraftfahrzeug |
| DE102021121163A1 (de) | 2021-08-13 | 2023-02-16 | Danfoss Power Solutions Gmbh & Co. Ohg | Verbesserter Teleskoplader |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19624308A1 (de) | 1996-06-18 | 1998-01-02 | Still Wagner Gmbh & Co Kg | Verfahren zum Betreiben eines Flurförderzeugs und Flurförderzeug zur Durchführung des Verfahrens |
| JP4069921B2 (ja) * | 2004-10-25 | 2008-04-02 | 三菱自動車工業株式会社 | 車両の旋回挙動制御装置 |
| JP4297150B2 (ja) * | 2005-10-13 | 2009-07-15 | トヨタ自動車株式会社 | Osまたはusを段階的に異なる手段で抑制する車輌 |
| US7788007B2 (en) * | 2006-01-12 | 2010-08-31 | Gm Global Technology Operations, Inc. | Roll stability indicator for vehicle rollover control |
| CN100591559C (zh) * | 2007-11-29 | 2010-02-24 | 三一重工股份有限公司 | 一种液压底盘工程机械转向控制系统 |
| CN101830225B (zh) * | 2010-05-13 | 2012-09-19 | 吉林大学 | 工程车辆主动防倾翻控制系统和方法 |
| CN102529959B (zh) * | 2010-12-31 | 2015-03-25 | 财团法人车辆研究测试中心 | 车辆翻覆预防安全系统及其方法 |
| CN103121447B (zh) * | 2013-03-19 | 2015-10-28 | 大连理工大学 | 一种弯道防侧滑侧翻自动控制系统及方法 |
-
2014
- 2014-02-07 DE DE102014202230.4A patent/DE102014202230A1/de not_active Withdrawn
-
2015
- 2015-02-03 IN IN315DE2015 patent/IN2015DE00315A/en unknown
- 2015-02-06 CN CN201510062806.8A patent/CN104828082A/zh active Pending
- 2015-02-06 KR KR1020150018412A patent/KR20150093615A/ko not_active Application Discontinuation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190107695A (ko) * | 2017-01-13 | 2019-09-20 | 크라운 이큅먼트 코포레이션 | 고속 전방 틸러 감도 억압 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104828082A (zh) | 2015-08-12 |
| IN2015DE00315A (ko) | 2015-08-14 |
| DE102014202230A1 (de) | 2015-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20150093615A (ko) | 조향 가능한 차량의 경사 방지 방법 및 장치 | |
| EP2112053B1 (en) | Yaw stability control system | |
| EP1234741B1 (en) | Rollover stability control for an automotive vehicle | |
| US8781684B2 (en) | Steering and control systems for a three-wheeled vehicle | |
| JP5538620B2 (ja) | 後輪が側方に滑った場合に二輪車を安定化するための方法 | |
| EP2484572B1 (en) | Vehicle motion control device | |
| KR101977997B1 (ko) | 운전 안전성을 조절하는 방법 및 시스템 | |
| JP4777257B2 (ja) | 車両を安定化させる際に車両操作者を支援するための方法及び装置 | |
| CA2661781C (en) | Rear wheel steering angle controlling device for vehicles | |
| US8364365B2 (en) | Method and apparatus for determining a reference vehicle velocity and a rear wheel speed in a vehicle having three speed sensors | |
| JP6515754B2 (ja) | 車両の操舵反力制御装置 | |
| US7558657B2 (en) | Method for the prevention of turnover of rear wheel steered vehicles, in particular of industrial trucks | |
| US20150274201A1 (en) | Drive supporting device, operation detecting device, and controller | |
| JP2012532056A (ja) | 車両の軌道を変更するための方法及びシステム | |
| KR102429175B1 (ko) | 차량 안정성을 향상시키기 위한 차량 제어 장치 및 방법 | |
| JP5961319B2 (ja) | 二輪車のカーブ走行時の操舵トルクを低減する方法 | |
| KR102335849B1 (ko) | 차량용 외란 대처 시스템 | |
| US9266552B2 (en) | Steering system for wheeled land vehicle | |
| WO2007031817A1 (en) | Method of controlling a steer by wire steering system | |
| JP2010158963A (ja) | 車両制御装置及び車両制御方法 | |
| JP5347499B2 (ja) | 車両制御装置及び車両制御方法 | |
| JP2018161943A (ja) | 車両の減速時姿勢制御装置 | |
| JP2010155562A (ja) | 車両制御装置及び車両制御方法 | |
| JP3774052B2 (ja) | 車両のステアリング装置 | |
| JP2008273360A (ja) | 車両の運動制御装置および方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Withdrawal due to no request for examination |