KR101174676B1 - 표면형상 측정방법 및 측정장치 - Google Patents
표면형상 측정방법 및 측정장치 Download PDFInfo
- Publication number
- KR101174676B1 KR101174676B1 KR1020100115351A KR20100115351A KR101174676B1 KR 101174676 B1 KR101174676 B1 KR 101174676B1 KR 1020100115351 A KR1020100115351 A KR 1020100115351A KR 20100115351 A KR20100115351 A KR 20100115351A KR 101174676 B1 KR101174676 B1 KR 101174676B1
- Authority
- KR
- South Korea
- Prior art keywords
- index
- directions
- heights
- specular
- shadow
- Prior art date
Links
Images


Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/521—Depth or shape recovery from laser ranging, e.g. using interferometry; from the projection of structured light
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2518—Projection by scanning of the object
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Theoretical Computer Science (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
정확성이 향상된 표면형상 측정방법 및 측정장치가 개시된다. 이러한 표면형상 측정방법은, 적어도 둘 이상의 방향들에서 패턴광을 측정대상물에 조사하고, 측정대상물로부터 반사된 패턴 이미지들을 획득하는 단계와, 상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 획득하는 단계와, 상기 방향들에서의 상기 높이들의 증가율을 나타내는 벡터장들을 획득하는 단계와, 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하는 단계와, 상기 신뢰지수들 및 상기 벡터장들을 이용하여, 통합 벡터장 획득하는 단계 및 상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 측정하는 단계를 포함한다.
Description
본 발명은 표면형상 측정방법 및 측정장치에 관한 것으로, 보다 상세히 비접촉에 의한 표면형상 측정방법 및 측정장치에 관한 것이다.
비접촉에 의한 3차원 측정대상물의 표면형상을 측정하는 기술이 여러 방향으로 개발되고 있다. 이들 중에서 레이저를 이용하는 방법과 모아레 패턴을 이용하는 방법이 널리 사용되고 있다.
한편, 이러한 레이저를 이용하는 방법과 모아레 패턴을 이용하는 방법에서는 각각 측정 대상물에 비스듬한 각도로 레이저 및 슬릿 패턴광을 조사하게 되는데, 측정 대상물의 돌출되는 각도가 레이저 또는 슬릿 패턴광을 조사하는 각도보다 큰 경우에는 레이저 또는 슬릿 패턴광이 측정 대상물의 일부분에 도달되지 못하는 영역이 발생하게 된다.
이러한 문제점을 해결하기 위해서, 레이저 또는 슬릿 패턴광을 여러 다른 방향에서 조사하여 각 방향에서의, 기판상의 각 위치(x,y)에 따른 높이를 산출하여 표면형상을 측정하게 된다. 한편, 이렇게 구해진 각 방향에서의 높이들은, 일반적으로 일치하지 않으며, 특정 방향에서의 측정 값은 디펙트를 포함하고 있기 때문에 이를 제거한 정확한 높이 산출에 어려움이 있다.
본 발명이 해결하고자 하는 과제는, 각 방향에서 측정된 높이들에서 디펙트를 제거하여 보다 정확성을 향상시킬 수 있는 표면형상 측정방법을 제공하는 것이다.
본 발명이 해결하고자 하는 다른 과제는, 이러한 방법을 구현할 수 있는 표면형상 측정장치를 제공하는 것이다.
이러한 과제를 해결하기 위한, 본 발명의 예시적인 일 실시예에 의한 표면형상 측정방법은, 적어도 둘 이상의 방향들에서 패턴광을 측정대상물에 조사하고, 측정대상물로부터 반사된 패턴 이미지들을 획득하는 단계와, 상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 획득하는 단계와, 상기 방향들에서의 상기 높이들의 증가율을 나타내는 벡터장들을 획득하는 단계와, 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하는 단계와, 상기 신뢰지수들 및 상기 벡터장들을 이용하여, 통합 벡터장 획득하는 단계 및 상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 측정하는 단계를 포함한다.
예컨대, 상기 신뢰지수들은 가시도(visibility) 지수, 스펙큘러(specular) 지수, 그림자(shadow) 지수 중 적어도 어느 하나를 포함할 수 있다.
이때, 상기 가시도 지수는, 가시도 문턱값보다 큰 경우 논리값 참을 부여하고, 상기 가시도 문턱값보다 작은 경우 논리값 거짓을 부여하며, 상기 스펙큘러 지수는, 위상변화에 따른 이미지들 중, 인텐시티가 스펙큘러 문턱값보다 큰 이미지들을 합산하여 합산 스펙큘러 지수를 획득하고, 상기 합산 스펙큘러 지수가 합산 스펙큘러 문턱값보다 큰 경우 논리값 참을 부여하고, 상기 합산 스펙큘러 문턱값보다 작은 경우 논리값 거짓을 부여하며, 상기 그림자 지수는, 위상변화에 따른 이미지들 중, 인텐시티가 그림자 문턱값보다 작은 이미지들을 합산하여 합산 그림자 지수를 획득하고, 상기 합산 그림자 지수가 합산 그림자 문턱값보다 큰 경우 논리값 참을 부여하고, 상기 합산 그림자 문턱값보다 작은 경우 논리값 거짓을 부여하며, 상기 방향들에서의 상기 높이들에 대한 상기 신뢰지수들은, 상기 가시도 지수, 상기 스펙큘러 지수 및 상기 그림자 지수를 이용하여 획득할 수 있다.
이 경우, 상기 방향들에서의 상기 높이들에 대한 상기 신뢰지수들은, 상기 가시도 지수, 상기 스펙큘러 지수 및 상기 그림자 지수를 논리합하여 획득될 수 있다.
이와 다르게, 상기 방향들에서의 상기 높이들에 대한 상기 신뢰지수들은, 상기 가시도 지수, 상기 스펙큘러 지수 및 상기 그림자 지수에, 각각 거짓 또는 참 중 어느 하나인 선택 논리값을 곱하여 선택 가시도 지수, 선택 스펙큘러 지수 및 선택 그림자 지수를 획득하고, 상기 선택 가시도 지수, 상기 선택 스펙큘러 지수 및 선택 그림자 지수를 논리합하여 획득될 수 있다.
또한, 상기 통합 벡터장을 획득하는 단계는, 상기 방향들에서의 상기 벡터장들 중에서, 신뢰지수의 논리값이 참인 벡터장들을 선택하는 단계 및 상기 선택된 벡터장들을 메디안(Median) 연산하여 상기 통합 벡터장을 획득하는 단계를 포함할 수 있다.
이 경우, 상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 측정하는 단계는, 상기 통합 벡터장에 발산 연산자를 가하여 우변으로 하고, 상기 높이에 라플라스 연산자(Laplacian)를 가하여 좌변으로 하는 포아송 방정식(Poisson Equation)을 구하는 단계 및 상기 포아송 방정식의 해인 높이를 구하는 단계를 포함할 수 있다.
또한, 상기 포아송 방정식의 해인 높이를 구하는 단계는, 무한 연산자(∂/∂x, ∂/∂y)를 갖는 포아송 방정식을, 유한 연산자를 갖는 포아송 방정식으로 대치한 유한 포아송 방정식으로 변경하는 단계 및 상기 유한 포아송 방정식의 해를 푸리에 급수로 전계하고, 각 푸리에 함수의 계수를 획득하는 단계를 포함할 수 있다.
본 발명의 예시적인 일 실시예에 의한 표면형상 측정장치는, 지지부, 적어도 둘 이상의 패턴이미지 투영부들, 이미지 획득부, 저장부 및 연산부를 포함한다. 상기 지지부는 측정 대상물이 형성된 기판을 지지한다. 상기 패턴이미지 투영부들은 적어도 둘 이상의 방향에서 측정 대상물에 패턴광을 조사한다. 상기 이미지 획득부는 상기 측정대상물로부터 반사된 각 방향의 패턴 이미지들을 캡쳐한다. 상기 저장부는 상기 이미지 획득부로부터 캡쳐된 패턴 이미지들을 저장한다. 상기 연산부는, 상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 획득하고, 상기 방향들에서의 상기 높이들의 최대증가율을 나타내는 벡터장들을 획득하고, 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하고, 상기 신뢰지수들 및 상기 벡터장들을 이용하여 통합 벡터장 획득한 후, 상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 계산한다.
예컨대, 상기 연산부는 높이 계산유닛, 신뢰지수 계산유닛, 저장유닛, 벡터장 계산유닛, 통합 벡터장 계산유닛, 경계 설정유닛 및 포아송 방정식 풀이유닛을 포함할 수 있다. 상기 높이 계산유닛은 상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 계산한다. 상기 신뢰지수 계산유닛은 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 계산한다. 상기 저장유닛은 계산된 상기 높이들 및 계산된 상기 신뢰지수들을 저장한다. 상기 벡터장 계산유닛은 상기 높이들의 증가율을 나타내는 벡터장들을 계산한다. 상기 통합 벡터장 계산유닛은 상기 방향들에서의 신뢰지수들 및 벡터장들을 이용하여 통합 벡터장을 계산한다. 상기 경계 설정유닛은 측정 대상물의 경계를 설정한다. 상기 포아송 방정식 풀이유닛은, 상기 통합 벡터장에 발산 연산자를 가하여 우변으로 하고, 상기 높이에 라플라시안(Laplacian) 연산자를 가하여 좌변으로 하는 포아송 방정식에, 상기 경계 설정유닛으로부터 획득된 경계에 경계조건(boundary condition)을 대입하여 상기 높이를 계산한다.
이러한 본 발명에 의하면, 각 방향에서 측정된 높이들에서, 그림자 디펙트, 스펙큘러 디펙트 등을 제거된 높이들을 선별하고, 이들을 이용하여 보다 정확성이 향상된다.
도 1은 본 발명의 예시적인 일 실시예에 의한 표면형상 측정방법을 도시한 순서도이다.
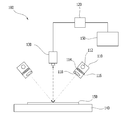
도 2는 본 발명의 예시적인 일 실시예에 의한 표면형상 측정장치를 도시한 개략도이다.
도 3은 도 2에서 도시된 저장부 및 연산부의 일 실시예를 도시한 개략도이다.
도 2는 본 발명의 예시적인 일 실시예에 의한 표면형상 측정장치를 도시한 개략도이다.
도 3은 도 2에서 도시된 저장부 및 연산부의 일 실시예를 도시한 개략도이다.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 형태를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 본문에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 개시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
제1, 제2 등의 용어는 다양한 구성 요소들을 설명하는데 사용될 수 있지만, 상기 구성 요소들은 상기 용어들에 의해 한정되어서는 안된다. 상기 용어들은 하나의 구성 요소를 다른 구성 요소로부터 구별하는 목적으로만 사용된다. 예를 들어, 본 발명의 권리 범위를 벗어나지 않으면서 제1 구성 요소는 제2 구성 요소로 명명될 수 있고, 유사하게 제2 구성 요소도 제1 구성 요소로 명명될 수 있다.
본 출원에서 사용한 용어는 단지 특정한 실시예들을 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, "포함하다" 또는 "가지다" 등의 용어는 명세서에 기재된 특징, 숫자, 단계, 동작, 구성 요소, 부분품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성 요소, 부분품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 갖는다.
일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 갖는 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.
이하, 도면을 중심으로 본 발명을 상세히 설명한다.
도 1은 본 발명의 예시적인 일 실시예에 의한 표면형상 측정방법을 도시한 순서도이다.
도 1을 참조하면, 본 발명의 예시적인 일 실시예에 의한 표면형상 측정방법에 의하면, 적어도 둘 이상의 방향들에서 패턴광을 측정대상물에 조사하고, 측정대상물로부터 반사된 패턴 이미지들을 획득한다(단계 S110).
예컨대, 상기 패턴광은 측정대상물에 기울어진 각도로 조사될 수 있으며, 상기 패턴광은 조명에 투영부와 차단부가 교대로 형성된 패턴을 투과시켜 생성시킬 수 있다. 한편, 일 방향에서 패턴광을 측정대상물에 조사하여 높이를 측정하는 경우에 측정 대상물의 타측에는 패턴광이 도달하지 못하고 그림자가 발생될 수 있다. 이를 방지하기 위해서, 적어도 둘 이상의 방향에서 패턴광을 측정대상물에 조사하여, 상기 패턴광이 도달되지 못하는 영역을 보상함으로써 보다 정확한 높이를 측정할 수 있다.
이때, 각 방향에서 패턴 이미지들은, 예컨대, 패턴의 피치를 이동시켜가면서 획득한다. 예컨대, 3-버킷 알고리즘의 경우, 상기 피치의 1/3 만큼씩 3번 이동시켜가면서, 3장의 패턴 이미지를 획득하고, 4-버킷 알고리즘의 경우, 상기 피치의 1/4 만큼씩 4번 이동시켜가면서, 4장의 패턴 이미지를 획득한다.
다음으로, 상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 획득한다(단계 S120). 즉, 이렇게 획득된 각 방향에서의 패턴이미지들을 이용하여 상기 방향들에서의 높이들을 획득한다.
격자들을 통과한 패턴광들에 대한 패턴 이미지들은 다음의 수학식 1과 같이사인함수로 근사될 수 있다.

이식에서, 아랫첨자 b는 상기 다수의 방향 중 어느 하나의 방향, 즉 채널을 도시하고, i는 피치만큼 이동시켰을 때의 이미지를 구분하기 위한 첨자로서 N-버킷 알고리즘의 경우, 1 내지 N의 자연수가 될 수 있으며, I0는 패턴의 피크 인텐티시(즉, 모듈레이션(Modulation))를 나타내고, A는 N-버킷 알고리즘에 따른 인텐시티들의 평균값이고, 이식에서 피치들을 이동시킴에 따른 위상 변화량 αbi는 다음의 수학식 2로 표현될 수 있다.
한편, 위의 수학식 1을 이용하여, 각 방향 b에서의 위상 변화량을 구하면, 아래의 수학식 3과 같이 표현된다.

또한, 수학식 3을 이용하여 각 방향에서의 높이 Hb를 구하면, 다음의 수학식 4와 같이 근사될 수 있다.

이 식에서, l0은 측정 대상물로부터 이미지 획득을 위한 이미지 획득부까지의 거리, d0은 패턴광을 조사하는 패턴이미지 투영부와 상기 이미지 획득부까지의 거리, f0은 기준면에서의 사인프리지 패턴(sin fridge pattern)의 주파수를 나타낸다.
이러한 수학식 4를 이용하여, 각 방향(b)에서, 측정대상물의 각 위치(x,y)에서의 높이Hb를 구할 수 있다.
한편, 이러한 각 방향(b)에서, 측정대상물의 각 위치(x,y)에서의 높이Hb를 구하는 방법은 예시적인 것일 뿐이며, 다른 방법이 적용될 수도 있음은 자명하다.
이하, 각 방향에서 구해진 높이들에서 노이즈들이 포함된 높이들을 제거하고, 나머지 높이들에 대한 통합방법을 상세히 설명한다.
각 방향(b)에서 구해진 높이들[Hb(x,y)]은 예컨대, 그림자들에 의한 디펙트(defect), 경면반사(또는 정반사)에 의한 디펙트(또는 스펙큘러 디펙트), 등 다양한 종류의 노이즈들이 포함될 수 있으므로, 서로 상이할 수 있으며, 이들을 통합하여 정확한 높이[H(x,y)]를 획득하게 된다.
이를 위해서, 상기 방향들에서의 상기 높이들의 최대증가율을 나타내는 벡터장들을 획득한다(단계 S130).
이러한 각 방향(b)에서의 벡터장들(Gb(x,y))은 다음의 수학식 5를 통해서 얻어질 수 있다.

즉, 각 방향에서 구해진 높이들에 그래디언트(gradient) 연산하여 각 방향(b)에서의 벡터장들들(Gb(x,y))을 구한다.
다음으로, 상기 방향들(b)에서의 상기 높이들에 대한 신뢰지수들(Cb)을 획득한다(단계 S140). 상기 신뢰지수들(Cb)은 가시도(visibility) 지수, 스펙큘러(specular) 지수, 그림자(shadow) 지수 중 적어도 어느 하나를 포함할 수 있다.
상기 가시도 지수를 구하기 위해서, 4- 버킷 알고리즘의 경우, 상기 수학식 1에서 피크 인텐시티(또는 모듈레이션) I0을 구하면 아래의 수학식 6으로 표현된다.

또한, 상기 수학식 1에서 인텐시티의 평균값 A를 구하면 아래의 수학식 7로 표현된다.

상기 수학식 6 및 수학식 7로부터 가시도(visibility) VF를 구하면, 가시도 VF는 아래의 수학식 8로 표현된다.

한편, 본 실시예에서, 상기 가시도 VF를 이용하여, 상기 방향(b)들에서의 가시도 지수 VIb는 다음의 수학식 9로 표현된다.

이 식에서, vthr은 실험에 의해 선택한 가시도의 문턱값(threshold value)이며, 수학식 9의 의미 다음과 같다. 즉, 다수의 방향들(b) 중에서, 예컨대 1방향의 가시도지수(VI1)가 가시도의 문턱값(vthr)보다 크면, 상기 제1 방향의 가시도지수(VI1)에는 논리값 참(1)을 부여하고, 가시도지수(VI1)가 가시도의 문턱값(vthr)보다 작거나 같으면, 상기 제1 방향의 가시도지수(VI1)에는 논리값 거짓(0)을 부여한다.
또한, 경면반사에 의한 스펙큘러(specular) 디펙트를 고려하기 위한, 다수의 방향들(b)의 스펙큘러 지수들(SpIb)은 다음의 수학식 10으로 표현될 수 있다.

이 식에서, 스펙큘러 문턱값(spthr) 및 합산 스펙큘러 문턱값(Spthr)은 실험에 의해 선택할 수 있다. 상기 수학식 10의 의미는 다음과 같다. 즉, 다수의 방향들(b) 중에서, 예컨대 1방향에서 위상변화에 따른 이미지들, 즉, N-버킷 알고리즘의 i번째 인텐티시(I1i)가 스펙큘러 문턱값(spthr)보다 크면, i번째 인텐티시(I1i)에 논리값 참(1)을 부여하고, 스펙큘러 문턱값(spthr)보다 작으면, i번째 인텐티시(I1i)에 논리값 거짓(0)을 부여하여, N-버킷 알고리즘의 N개의 이미지들에 대한 논리값을 합산한다. 이렇게 합산된 논리값들이 합산 스펙큘러 문턱값(Spthr)보다 크거나 같으면, 상기 제1 방향에서의 스펙큘러 지수(SpI1)에는 논리값 참(1)을 부여하고, 합산 스펙큘러 문턱값(Spthr)보다 작으면, 상기 제1 방향에서의 스펙큘러 지수(SpI1)에는 논리값 거짓(0)을 부여한다.
또한, 그림자에 의한 그림자 디펙트를 고려하기 위한, 다수의 방향들(b)의 그림자 지수들(ShIb)은 다음의 수학식 10으로 표현될 수 있다.

이 식에서, 그림자 문턱값(shthr) 및 합산 그림자 문턱값(Shthr)은 실험에 의해 선택할 수 있다. 상기 수학식 11의 의미는 다음과 같다. 즉, 다수의 방향들(b) 중에서, 예컨대 1방향에서 위상변화에 따른 이미지들 즉, N-버킷 알고리즘의 i번째 인텐티시(I1i)가 그림자 문턱값(shthr)보다 작으면, i번째 인텐티시(I1i)에 논리값 참(1)을 부여하고, 스펙큘러 문턱값(spthr)보다 크거나 같으면, i번째 인텐티시(I1i)에 논리값 거짓(0)을 부여하여, N-버킷 알고리즘의 N개의 이미지들에 대한 논리값을 합산한다. 이렇게 합산된 논리값들이 합산 그림자 문턱값(Shthr)보다 크거나 같으면, 상기 제1 방향에서의 스펙큘러 지수(SpI1)에는 논리값 참(1)을 부여하고, 합산 그림자 문턱값(Shthr)보다 작으면, 상기 제1 방향에서의 그림자 지수(ShI1)에는 논리값 거짓(0)을 부여한다.
이와 같이 상기 수학식 9, 수학식 10 및 수학식 11을 통해서 각각 얻어진 가시도지수들(VIb), 스펙큘러 지수들(SpIb) 및 그림자 지수들(ShIb)을 이용하여, 각 방향(b)에서의 신뢰지수(Cb)를 다음의 수학식 12를 통해서 계산한다.

이 식에서, VM, SpM 및 ShM은 각각 논리값 참(1) 또는 거짓(0) 중 어느 하나의 값을 나타내고, '|' 연산자는 OR-연산자이다. 이와 같이, VM, SpM 및 ShM을 조절함으로써, 신뢰지수(Cb)의 고려대상을 조절할 수 있다. 예컨대, VM, SpM 및 ShM에 모두 논리값 참(1)을 부여하는 경우, 가시도, 스펙큘러 디펙트 및 그림자 디펙트를 모두 고려하여, 각 방향(b)에서의 신뢰지수(Cb)를 산출할 수 있으며, VM 및 SpM에는 논리값 거짓(O)을 부여하고, ShM에는 논리값 참(1)을 부여하는 경우, 그림자 디펙트만을 고려한 각 방향(b)에서의 신뢰지수(Cb)를 산출할 수 있다.
한편, 본 실시예에서는, 예컨대, 상기 방향들에서의 상기 높이들의 최대증가율을 나타내는 벡터장들을 획득하고(단계 S130), 다음으로 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하는 것(단계 S140)처럼 기재되고 있으나, 이러한 순서는 예시적인 것일 뿐, 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하고, 상기 방향들에서의 상기 높이들의 최대증가율을 나타내는 벡터장들을 획득할 수도 있다.
다음으로, 수학식 12를 통해서 계산된 상기 신뢰지수들(Cb) 및 상기 수학식 5를 통해서 계산된 상기 벡터장들(Gb(x,y))을 이용하여, 통합 벡터장(G(x,y))을 획득한다(단계 S150). 예컨대, 상기 통합 벡터장(G(x,y))은 아래의 수학식 13을 통해서 획득될 수 있다.

즉, 상기 방향들에서의 상기 벡터장들 중에서, 신뢰지수의 논리값이 참(1)인 벡터장들을 선택하고, 이러한 논리값이 참(1)인 벡터장들을 메디안(Median) 연산하여 상기 통합 벡터장(G(x,y))을 계산한다.
다음으로, 수학식 13을 통해서 계산된 상기 통합 벡터장(G(x,y))을 이용하여, 각 방향(b)에서의 높이들(Hb(x,y))이 통합(merge)된, 측정대상물의 각 좌표값에 대한 높이(H(x,y))를 계산한다(단계 S160). 이를 위해서, 아래의 수학식 14를 최소화하는 높이(H(x,y))를 구한다.

위의 수학식 14를 최소화 시키기 위한 접근방법으로부터, 아래의 수학식 14와 같은, 포아송 방정식(Poisson Equation)이 도출된다.

수학식 15에서 도시된 바와 같이, 상기 통합 벡터장에 발산 연산자를 가하여 우변으로 하고, 상기 높이에 라플라스 연산자(Laplacian)를 가하여 좌변으로 하는 포아송 방정식(Poisson Equation)을 만족하는 높이(H(x,y))는, 각 방향(b)에서 획득된, 그림자들에 의한 디펙트(defect), 경면반사(또는 정반사)에 의한 디펙트, 등 다양한 종류의 노이즈들을 포함하고 있는 여러 방향에서의 높이들(Hb(x,y))이 통합된 것으로, 이러한 높이(H(x,y))는 상기 노이즈들이 제거된 통합 벡터장(G(x,y))로부터 얻어지므로, 상기 노이즈들이 제거되어 있다.
예컨대, 이러한 높이(H(x,y))를 계산하기 위해서, 예컨대, 상기 라플라스 연산자 및 발산 연산자에 포함된 무한 연산자(∂/∂x, ∂/∂y)를 유한 연산자로 근사시켜, 유산 연산자를 갖는 포아송 방정식으로 대치한 유한 포아송 방정식으로 변경할 수 있다. 이러한 유한 포아송 방정식은 아래의 수학식 16으로 표현될 수 있다.

위의 편미분 방정식의 해를 구하기 위해서, 경계지점에서의 높이를 그라운드로하여, h0n=hMn=hm0=hmN=0의 경계조건(boundary condition)을 대입한다.
한편, 수학식 16에서, x축과 y축의 변위를 동일하게 단위길이로 가정하면(즉, △x=△y=1), 상기 수학식 16은 다음의 수학식 17로 표현될 수 있다.
한편, 임의의 함수 이변수 함수는 아래 수학식 18과 같이 푸리에 급수로 전개될 수 있다.

상기 수학식 18로 전개되는 푸리에 급수를 수학식 17의 해로 가정하고, 수학식 17에 대입하면, 다음의 수학식 19을 얻을 수 있다.


이 식에서, 우변의 계수 Fjk는 다음의 수학식 20으로 나타낼 수 있다.

상기 식에서, 계수 gmn은 수학식 15의 통합 벡터장에 발산 연산자를 가하여 우변의 함수를 푸리에 전개하여 구할 수 있다.
한편, 수학식 19는 사인함수의 덧셈공식을 이용하여 정리하면, 다음의 수학식 21로 표현할 수 있다.

따라서, 수학식 18에서의 계수 Ujk는 다음의 수학식 22와 같이 표현되어, 수학식 15에서의 높이에 관한 해를 구할 수 있다.

본 발명의 예시적인 일 실시예에 의한 표면형상 측정방법에 의하면, 각 방향에서 측정된 높이들에서, 그림자 디펙트, 스펙큘러 디펙트 등을 제거된 높이들을 선별하고, 이들을 이용하여 보다 정확성이 향상된다.
도 2는 본 발명의 예시적인 일 실시예에 의한 표면형상 측정장치를 도시한 개략도이고, 도 3은 도 2에서 도시된 저장부 및 연산부의 일 실시예를 도시한 개략도이다.
도 2를 참조하면, 본 발명의 예시적인 일 실시예에 의한 표면형상 측정장치(100)는 측정대상물이 배치된 기판(S)을 지지 및 이송시키기 위한 지지부(140), 기판(S)에 패턴 이미지를 조사하기 위한 적어도 둘 이상의 패턴이미지 투영부(110), 기판(S)의 이미지를 촬영하는 이미지 획득부(130), 획득된 이미지들을 저장하는 저장부(120) 및 여러가지 연산을 수행하는 연산부(150)를 포함한다.
상기 패턴이미지 투영부(110)는 상기 기판(S)에 형성된 측정대상물의 표면형상을 측정하기 위하여 패턴 이미지를 기판(S)에 조사한다. 예를 들어, 패턴이미지 투영부(110)는 광을 발생시키는 광원(112), 광원(112)으로부터의 광을 패턴 이미지로 변환시키기 위한 격자소자(114), 격자소자(114)를 피치 이송시키기 위한 격자이송기구(116) 및 격자소자(114)에 의해 변환된 패턴 이미지를 측정대상물에 투영하기 위한 투영 렌즈(118)를 포함한다.
상기 격자소자(114)는 패턴 이미지의 위상천이를 위해 피에조 엑추에이터(piezo actuator : PZT) 등의 격자이송기구(116)를 통해 2π/N 만큼씩 이송될 수 있다. 여기서, N은 2 이상의 자연수이다. 이러한 구성을 갖는 패턴이미지 투영부(110)는 검사 정밀도를 높이기 위하여 이미지 획득부(130)를 중심으로 원주 방향을 따라 일정한 각도로 이격되도록 복수가 설치될 수 있다. 복수의 패턴이미지 투영부들(110)은 기판(S)에 대하여 일정한 각도로 기울어지게 설치되어, 복수의 방향으로부터 기판(S)에 패턴 이미지를 조사한다.
이미지 획득부(130)는 패턴이미지 투영부(110)의 패턴 이미지의 조사를 통해 기판(S)의 이미지를 촬영한다. 예를 들어, 이미지 획득부(130)는 기판(S)으로부터 수직한 상부에 설치된다. 이미지 획득부(130)는 이미지 촬영을 위해 CCD 카메라 또는 CMOS 카메라를 포함할 수 있다.
상기 저장부(120)는 이미지 획득부(130)로부터 획득된 이미지들을 저장한다. 상기 저장부(120)는 다수의 섹션으로 분할되어, 그 중에서, 어느 하나의 섹션에는 복수의 방향 중 어느 하나의 방향에서, N-버킷 알고리즘에 따라 촬영된 N개의 이미지들을 저장할 수 있다.
상기 연산부(150)는, 상기 저장부(120)에 저장된 상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 획득하고, 상기 방향들에서의 상기 높이들의 최대증가율을 나타내는 벡터장들을 획득하고, 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하고, 상기 신뢰지수들 및 상기 벡터장들을 이용하여 통합 벡터장 획득한 후, 상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 계산한다.
도 3을 참조하면, 이러한 연산을 수행하는 상기 연산부(150)는, 높이 계산유닛(151), 신뢰지수 계산유닛(152), 저장유닛(153), 벡터장 계산유닛(154), 통합 벡터장 계산유닛(155), 경계 설정유닛(157) 및 포아송 방정식 풀이유닛(156)을 포함할 수 있다.
상기 높이 계산유닛(151)은 상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 계산한다. 보다 상세히, 제1 방향의 제1 채널(Ch1)에서 N-버킷 알고리즘을 이용하여 N장의 이미지들(I11, I12, ..., I1N)을 이용하여, 예컨대 수학식 4를 통해서, 상기 제1 방향의 높이 H1을 구하고, 마찬가지 방법으로 제m 방향의 제m 채널(Chm)에서 N-버킷 알고리즘을 이용하여 N장의 이미지들(Im1, Im2, ..., ImN)을 이용하여, 예컨대 수학식 4를 통해서, 상기 제m 방향의 높이 Hm을 구한다.
또한, 상기 신뢰지수 계산유닛(152)은 상기 방향들에서의 상기 높이들(H1, H2, ... Hm)에 대한 신뢰지수들(C1, C2, ..., Cm)을, 수학식 12를 이용하여 계산한다.
상기 저장유닛(153)은 계산된 상기 높이들(H1, H2, ... Hm) 및 계산된 상기 신뢰지수들(C1, C2, ..., Cm)을 저장한다.
상기 벡터장 계산유닛(154)은, 상기 저장유닛(153)에 저장된 상기 높이들(H1, H2, ... Hm)을 이용하여 상기 높이들(H1, H2, ... Hm)의 최대증가율을 나타내는 벡터장들(G1, G2, ...Gm)을, 수학식 5를 이용하여 계산한다.
상기 통합 벡터장 계산유닛(155)은 상기 방향들에서의 신뢰지수들(C1, C2, ..., Cm) 및 벡터장들(G1, G2, ...Gm)을 이용하여 수학식 13을 통해 통합 벡터장(G)을 계산한다.
상기 경계 설정유닛(157)은 측정 대상물의 경계를 설정한다. 이때, 상기 경계 설정유닛(157)은 아래의 수학식 23에 도시된 가중평균 방법을 이용하여 측정 대상물의 경계를 설정할 수 있다.

상기 식에서 wj는 가중치이다. 이때, 경계는 반드시 측정 대상물의 단부로 한정할 필요 없으며, 기판까지 확장된 영역이어도 무방하다.
상기 포아송 방정식 풀이유닛(156)은, 상기 통합 벡터장(G)에 발산 연산자를 가하여 우변으로 하고, 상기 높이에 라플라시안(Laplacian) 연산자를 가하여 좌변으로 하는 포아송 방정식에, 상기 경계 설정유닛(157)으로부터 획득된 경계에 경계조건(boundary condition)을 대입하여 상기 높이를 계산한다.
각 유닛들에서 수행하는 연산 방법은, 도 1에 대한 설명에서 상세히 설명하였으므로, 중복되는 설명은 생략한다.
이와 같은 구성을 갖는 표면형상 측정장치(100)는 패턴이미지 투영부(110) 또는 조명부(120)를 이용하여 기판(S)에 광을 조사하고, 이미지 획득부(130)를 통해 기판(S)의 이미지를 촬영함으로써, 기판(S)의 표면형상을 측정한다. 한편, 도 2에 도시된 표면형상 측정장치(100)는 일 예에 지나지 않으며, 적어도 둘 이상의 패턴이미지 투영부(110)와 이미지 획득부(130)를 포함하는 다양한 구성으로의 변경이 가능하다.
앞서 설명한 본 발명의 상세한 설명에서는 본 발명의 바람직한 실시예들을 참조하여 설명하였지만, 해당 기술분야의 숙련된 당업자 또는 해당 기술분야에 통상의 지식을 갖는 자라면 후술될 특허청구범위에 기재된 본 발명의 사상 및 기술 영역으로부터 벗어나지 않는 범위 내에서 본 발명을 다양하게 수정 및 변경시킬 수 있을 것이다. 따라서, 전술한 설명 및 아래의 도면은 본 발명의 기술사상을 한정하는 것이 아닌 본 발명을 예시하는 것으로 해석되어져야 한다.
100: 표면형상 측정장치 110: 패턴이미지 투영부
112: 광원 114: 격자소자
118: 투영렌즈 120: 저장부
130: 이미지 획득부 140: 지지부
150: 연산부 151: 높이계산유닛
152: 신뢰지수계산유닛 153: 저장유닛
154: 벡터장계산유닛 155: 통합벡터장계산유닛
156: 포아송방정식풀이유닛 157: 경계설정유닛
112: 광원 114: 격자소자
118: 투영렌즈 120: 저장부
130: 이미지 획득부 140: 지지부
150: 연산부 151: 높이계산유닛
152: 신뢰지수계산유닛 153: 저장유닛
154: 벡터장계산유닛 155: 통합벡터장계산유닛
156: 포아송방정식풀이유닛 157: 경계설정유닛
Claims (10)
- 적어도 둘 이상의 방향들에서 패턴광을 측정대상물에 조사하고, 측정대상물로부터 반사된 패턴 이미지들을 획득하는 단계;
상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 획득하는 단계;
상기 방향들에서의 상기 높이들의 증가율을 나타내는 벡터장들을 획득하는 단계;
상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하는 단계;
상기 신뢰지수들 및 상기 벡터장들을 이용하여, 통합 벡터장 획득하는 단계; 및
상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 측정하는 단계를 포함하는 표면형상 측정방법. - 제1항에 있어서,
상기 신뢰지수들은 가시도(visibility) 지수, 스펙큘러(specular) 지수, 그림자(shadow) 지수 중 적어도 어느 하나를 포함하는 것을 특징으로 하는 표면형상 측정방법. - 제2항에 있어서,
상기 가시도 지수는, 가시도 문턱값보다 큰 경우 논리값 참을 부여하고, 상기 가시도 문턱값보다 작은 경우 논리값 거짓을 부여하며,
상기 스펙큘러 지수는, 위상변화에 따른 이미지들 중, 인텐시티가 스펙큘러 문턱값보다 큰 이미지들을 합산하여 합산 스펙큘러 지수를 획득하고, 상기 합산 스펙큘러 지수가 합산 스펙큘러 문턱값보다 큰 경우 논리값 참을 부여하고, 상기 합산 스펙큘러 문턱값보다 작은 경우 논리값 거짓을 부여하며,
상기 그림자 지수는, 위상변화에 따른 이미지들 중, 인텐시티가 그림자 문턱값보다 작은 이미지들을 합산하여 합산 그림자 지수를 획득하고, 상기 합산 그림자 지수가 합산 그림자 문턱값보다 큰 경우 논리값 참을 부여하고, 상기 합산 그림자 문턱값보다 작은 경우 논리값 거짓을 부여하며,
상기 방향들에서의 상기 높이들에 대한 상기 신뢰지수들은, 상기 가시도 지수, 상기 스펙큘러 지수 및 상기 그림자 지수를 이용하여 획득하는 것을 특징으로 하는 표면형상 측정방법. - 제3항에 있어서,
상기 방향들에서의 상기 높이들에 대한 상기 신뢰지수들은,
상기 가시도 지수, 상기 스펙큘러 지수 및 상기 그림자 지수를 논리합하여 획득하는 것을 특징으로 하는 표면형상 측정방법. - 제3항에 있어서,
상기 방향들에서의 상기 높이들에 대한 상기 신뢰지수들은,
상기 가시도 지수, 상기 스펙큘러 지수 및 상기 그림자 지수에, 각각 거짓 또는 참 중 어느 하나인 선택 논리값을 곱하여 선택 가시도 지수, 선택 스펙큘러 지수 및 선택 그림자 지수를 획득하고, 상기 선택 가시도 지수, 상기 선택 스펙큘러 지수 및 선택 그림자 지수를 논리합하여 획득하는 것을 특징으로 하는 표면형상 측정방법. - 제4항 또는 제5항에 있어서,
상기 통합 벡터장을 획득하는 단계는,
상기 방향들에서의 상기 벡터장들 중에서, 신뢰지수의 논리값이 참인 벡터장들을 선택하는 단계; 및
상기 선택된 벡터장들을 메디안(Median) 연산하여 상기 통합 벡터장을 획득하는 단계를 포함하는 것을 특징으로 하는 표면형상 측정방법. - 제6항에 있어서,
상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 측정하는 단계는,
상기 통합 벡터장에 발산 연산자를 가하여 우변으로 하고, 상기 높이에 라플라스 연산자(Laplacian)를 가하여 좌변으로 하는 포아송 방정식(Poisson Equation)을 구하는 단계; 및
상기 포아송 방정식의 해인 높이를 구하는 단계를 포함하는 것을 특징으로 하는 표면형상 측정방법. - 제7항에 있어서,
상기 포아송 방정식의 해인 높이를 구하는 단계는,
무한 연산자(∂/∂x, ∂/∂y)를 갖는 포아송 방정식을, 유한 연산자를 갖는 포아송 방정식으로 대치한 유한 포아송 방정식으로 변경하는 단계; 및
상기 유한 포아송 방정식의 해를 푸리에 급수로 전계하고, 각 푸리에 함수의 계수를 획득하는 단계를 포함하는 것을 특징으로 하는 표면형상 측정방법. - 측정 대상물이 형성된 기판을 지지하는 지지부;
적어도 둘 이상의 방향에서, 상기 측정 대상물에 패턴광을 조사하는 패턴이미지 투영부들;
상기 측정대상물로부터 반사된 각 방향의 패턴 이미지들을 캡쳐하는 이미지 획득부;
상기 이미지 획득부로부터 캡쳐된 패턴 이미지들을 저장하는 저장부; 및
상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 획득하고, 상기 방향들에서의 상기 높이들의 증가율을 나타내는 벡터장들을 획득하고, 상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 획득하고, 상기 신뢰지수들 및 상기 벡터장들을 이용하여 통합 벡터장 획득한 후, 상기 통합 벡터장을 이용하여 측정대상물의 각 좌표값에 대한 높이를 계산하는 연산부,
를 포함하는 것을 특징으로 하는 표면형상 측정장치. - 제9항에 있어서,
상기 연산부는,
상기 패턴 이미지들을 이용하여 상기 방향들에서의 높이들을 계산하는 높이계산유닛;
상기 방향들에서의 상기 높이들에 대한 신뢰지수들을 계산하는 신뢰지수 계산유닛;
계산된 상기 높이들 및 계산된 상기 신뢰지수들을 저장하는 저장유닛;
상기 높이들의 최대증가율을 나타내는 벡터장들을 계산하는 벡터장 계산유닛;
상기 방향들에서의 신뢰지수들 및 벡터장들을 이용하여 통합 벡터장을 계산하는 통합 벡터장 계산유닛;
측정 대상물의 경계를 설정하는 경계 설정유닛; 및
상기 통합 벡터장에 발산 연산자를 가하여 우변으로 하고, 상기 높이에 라플라시안(Laplacian) 연산자를 가하여 좌변으로 하는 포아송 방정식에, 상기 경계 설정유닛으로부터 획득된 경계에 경계조건(boundary condition)을 대입하여 상기 높이를 계산하는 포아송 방정식 풀이유닛을 포함하는 것을 특징으로 하는 표면형상 측정장치.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100115351A KR101174676B1 (ko) | 2010-11-19 | 2010-11-19 | 표면형상 측정방법 및 측정장치 |
| US13/298,969 US8982330B2 (en) | 2010-11-19 | 2011-11-17 | Method and apparatus of profiling a surface |
| CN201110376531.7A CN102538706B (zh) | 2010-11-19 | 2011-11-21 | 绘制表面轮廓的方法和装置 |
| JP2011253957A JP5546522B2 (ja) | 2010-11-19 | 2011-11-21 | 表面形状測定方法及び測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100115351A KR101174676B1 (ko) | 2010-11-19 | 2010-11-19 | 표면형상 측정방법 및 측정장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20120054130A KR20120054130A (ko) | 2012-05-30 |
| KR101174676B1 true KR101174676B1 (ko) | 2012-08-17 |
Family
ID=46064019
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020100115351A KR101174676B1 (ko) | 2010-11-19 | 2010-11-19 | 표면형상 측정방법 및 측정장치 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8982330B2 (ko) |
| JP (1) | JP5546522B2 (ko) |
| KR (1) | KR101174676B1 (ko) |
| CN (1) | CN102538706B (ko) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103105285B (zh) * | 2013-01-22 | 2015-03-18 | 中国计量学院 | 基于暗影剔除的光纤面板极限分辨率测试方法及仪器 |
| KR101490359B1 (ko) * | 2013-05-20 | 2015-02-06 | (주)펨트론 | 표면 형상 측정 장치 |
| JP6507653B2 (ja) * | 2015-01-13 | 2019-05-08 | オムロン株式会社 | 検査装置及び検査装置の制御方法 |
| WO2016145582A1 (zh) * | 2015-03-13 | 2016-09-22 | 香港应用科技研究院有限公司 | 相位偏移校准方法、3d形状检测的方法、系统及投影系统 |
| CN104713497B (zh) * | 2015-03-13 | 2017-07-04 | 香港应用科技研究院有限公司 | 相位偏移校准方法、3d形状检测的方法、系统及投影系统 |
| CN105043300A (zh) * | 2015-05-27 | 2015-11-11 | 东莞市盟拓光电科技有限公司 | 可从多方位对被测物同时投影的三维测量系统 |
| JP7040325B2 (ja) * | 2018-07-04 | 2022-03-23 | 日本製鉄株式会社 | 凹凸部検出方法及び凹凸部検出装置 |
| US11610350B2 (en) | 2021-08-05 | 2023-03-21 | Adobe Inc. | Automatically filling a geometric shape with graphical cells aligned with the geometric shape |
| US11651536B2 (en) * | 2021-09-16 | 2023-05-16 | Adobe Inc. | Directional pattern generation for digital images |
| US11704848B2 (en) | 2021-10-19 | 2023-07-18 | Adobe Inc. | Systems for generating stroked paths |
| CN118742784A (zh) | 2022-03-09 | 2024-10-01 | 雅马哈发动机株式会社 | 三维计测用运算装置、三维计测用程序、记录介质、三维计测装置及三维计测用运算方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007322162A (ja) | 2006-05-30 | 2007-12-13 | 3D Media Co Ltd | 3次元形状測定装置及び3次元形状測定方法 |
| JP2008170209A (ja) | 2007-01-10 | 2008-07-24 | Nikon Corp | 形状測定方法 |
| JP2009264862A (ja) | 2008-04-24 | 2009-11-12 | Panasonic Electric Works Co Ltd | 3次元形状計測方法および装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4087788A (en) * | 1977-01-14 | 1978-05-02 | Ncr Canada Ltd - Ncr Canada Ltee | Data compression system |
| US5300347A (en) * | 1991-03-01 | 1994-04-05 | Kimberly-Clark Corporation | Embossed facial tissue |
| CN1437000A (zh) | 2002-02-09 | 2003-08-20 | 沈阳同联集团高新技术有限公司 | 投影栅线测量物体三维表面形状的方法和装置 |
| US7440590B1 (en) * | 2002-05-21 | 2008-10-21 | University Of Kentucky Research Foundation | System and technique for retrieving depth information about a surface by projecting a composite image of modulated light patterns |
| US7286246B2 (en) * | 2003-03-31 | 2007-10-23 | Mitutoyo Corporation | Method and apparatus for non-contact three-dimensional surface measurement |
| JP4077754B2 (ja) | 2003-04-04 | 2008-04-23 | オリンパス株式会社 | 3次元形状測定装置 |
| US8675176B2 (en) * | 2005-02-25 | 2014-03-18 | Asml Netherlands B.V. | Parameter control in a lithographic apparatus using polarization |
| JP4611782B2 (ja) | 2005-03-28 | 2011-01-12 | シチズンホールディングス株式会社 | 3次元形状測定方法及び測定装置 |
| JP4230525B2 (ja) * | 2005-05-12 | 2009-02-25 | 有限会社テクノドリーム二十一 | 3次元形状計測方法およびその装置 |
| CA2528791A1 (en) * | 2005-12-01 | 2007-06-01 | Peirong Jia | Full-field three-dimensional measurement method |
| US7545512B2 (en) * | 2006-01-26 | 2009-06-09 | Koh Young Technology Inc. | Method for automated measurement of three-dimensional shape of circuit boards |
| FR2902197B1 (fr) * | 2006-06-07 | 2008-07-25 | Univ Bretagne Occidentale Etab | Procede de localisation d'un objet magnetique, produit programme d'ordinateur, moyen de stockage et dispositif de localisation correspondants |
| US20080117438A1 (en) * | 2006-11-16 | 2008-05-22 | Solvision Inc. | System and method for object inspection using relief determination |
| JP5016520B2 (ja) | 2008-02-26 | 2012-09-05 | パナソニック株式会社 | 3次元形状計測方法および装置 |
| DE102010029091B4 (de) | 2009-05-21 | 2015-08-20 | Koh Young Technology Inc. | Formmessgerät und -verfahren |
| US8391590B2 (en) * | 2010-03-04 | 2013-03-05 | Flashscan3D, Llc | System and method for three-dimensional biometric data feature detection and recognition |
| US20110218428A1 (en) * | 2010-03-04 | 2011-09-08 | Medical Scan Technologies, Inc. | System and Method for Three Dimensional Medical Imaging with Structured Light |
-
2010
- 2010-11-19 KR KR1020100115351A patent/KR101174676B1/ko active IP Right Grant
-
2011
- 2011-11-17 US US13/298,969 patent/US8982330B2/en active Active
- 2011-11-21 JP JP2011253957A patent/JP5546522B2/ja active Active
- 2011-11-21 CN CN201110376531.7A patent/CN102538706B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007322162A (ja) | 2006-05-30 | 2007-12-13 | 3D Media Co Ltd | 3次元形状測定装置及び3次元形状測定方法 |
| JP2008170209A (ja) | 2007-01-10 | 2008-07-24 | Nikon Corp | 形状測定方法 |
| JP2009264862A (ja) | 2008-04-24 | 2009-11-12 | Panasonic Electric Works Co Ltd | 3次元形状計測方法および装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102538706B (zh) | 2014-09-24 |
| JP2012112952A (ja) | 2012-06-14 |
| CN102538706A (zh) | 2012-07-04 |
| KR20120054130A (ko) | 2012-05-30 |
| US20120127305A1 (en) | 2012-05-24 |
| US8982330B2 (en) | 2015-03-17 |
| JP5546522B2 (ja) | 2014-07-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101174676B1 (ko) | 표면형상 측정방법 및 측정장치 | |
| JP4290733B2 (ja) | 3次元形状計測方法及びその装置 | |
| KR101257538B1 (ko) | 표면형상의 측정방법 및 이것을 이용한 장치 | |
| US9441959B2 (en) | Calibration method and shape measuring apparatus | |
| JP2022547528A (ja) | モアレ要素及び回転対称配列を用いるイメージングオーバレイターゲット | |
| US20120236317A1 (en) | Three-dimensional distance measurement apparatus, three-dimensional distance measurement method, and non-transitory computer-readable storage medium | |
| KR102149707B1 (ko) | 3차원 형상 계측 장치, 3차원 형상 계측 방법 및 프로그램 | |
| US10928190B2 (en) | Techniques for shape measurement using high frequency patterns and related systems and methods | |
| TWI512263B (zh) | 形狀測量裝置以及形狀測量方法 | |
| JP4077754B2 (ja) | 3次元形状測定装置 | |
| KR101173668B1 (ko) | 다중 공간 주파수를 이용한 3차원 물체의 깊이 측정 방법 및 그 장치 | |
| JP2011064482A (ja) | 高速三次元計測装置及び高速三次元計測方法 | |
| JP5657276B2 (ja) | 形状計測装置及び形状計測方法 | |
| WO2016001985A1 (ja) | 計測方法、計測装置、計測プログラム及び計測プログラムを記録した、コンピュータ読み取り可能な記録媒体 | |
| US8970674B2 (en) | Three-dimensional measurement apparatus, three-dimensional measurement method and storage medium | |
| JP6035031B2 (ja) | 複数の格子を用いた三次元形状計測装置 | |
| US20220155056A1 (en) | Three-dimensional shape measuring apparatus, three-dimensional shape measuring method, program, and storage medium | |
| KR101409803B1 (ko) | 기판의 휨 정보의 측정이 가능한 표면 형상 측정 방법 및 표면 형상 측정 장치 | |
| Da et al. | Phase unwrapping using interlaced fringes for phase-shifting techniques | |
| JP2010060420A (ja) | 表面形状および/または膜厚測定方法およびその装置 | |
| CN107121058A (zh) | 测量方法和测量程序 | |
| KR101465996B1 (ko) | 선택적 큰 주기를 이용한 고속 3차원 형상 측정 방법 | |
| JP2010151781A (ja) | 周波数推定方法、周波数推定装置、表面形状測定方法及び表面形状測定装置 | |
| JP2009300100A5 (ko) | ||
| JP2010185844A (ja) | 表面形状測定方法およびこれを用いた装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20150805 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20160608 Year of fee payment: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20170621 Year of fee payment: 6 |