본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명 의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
제1, 제2 등과 같이 서수를 포함하는 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되지는 않는다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다. 예를 들어, 본 발명의 권리 범위를 벗어나지 않으면서 제1 구성요소는 제2 구성요소로 명명될 수 있고, 유사하게 제2 구성요소도 제1 구성요소로 명명될 수 있다. 및/또는 이라는 용어는 복수의 관련된 기재된 항목들의 조합 또는 복수의 관련된 기재된 항목들 중의 어느 항목을 포함한다.
어떤 구성요소가 다른 구성요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다.
본 출원에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징 들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가지고 있다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥 상 가지는 의미와 일치하는 의미를 가지는 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.
또한, 첨부 도면을 참조하여 설명함에 있어, 도면 부호에 관계없이 동일한 구성 요소는 동일한 참조부호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다. 본 발명을 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 불필요하게 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.
도 1은 본 발명의 실시예에 따른 차량의 조향 방법의 개략적인 흐름도이다. 여기서, 차량은 자율적으로 조향 기능이 있는 자율 주행 차량이 될 수 있으며, 특히 무인 지상 차량(UGV)이 될 수 있다. 또한, 본 명세서에서 다루는 장애물은 정지 장애물과 이동 장애물을 포함할 수 있다. 이동 장애물은 행인, 같은 방향 또는 반대방향에서 오는 차량 등과 같이 그 위치가 각 샘플링 시간마다 변경될 수 있는 장애물이 될 수 있다. 이하에서는 차량이 무인 지상 차량인 경우와 장애물이 정지 장 애물인 경우를 중심으로 설명한다.
단계 S110에서, 무인 지상 차량의 조향 장치는 차량의 출발 지점과 목표 지점을 이용하여 제1 경로를 설정한다. 제1 경로는 출발 지점과 목표 지점을 연결하여 생성된 직선이 될 수 있다. 이후 제1 경로상에 존재하는 다양한 장애물을 회피하여 차량이 운행할 수 있도록 제2 경로를 설정하는 방법이 제시된다.
단계 S120에서, 무인 지상 차량의 진행 시 이에 탑재된 복수의 장애물 센서가 무인 지상 차량 주위에 있는 장애물을 감지하여 장애물 위치 신호를 생성한다.
장애물 위치 신호는 후술하는 바와 같이 장애물의 좌표값 및 차량의 각 정점에서 장애물을 보는 시선의 라인과 차량의 운행 방향에 의해 형성되는 각들과 같은 정보를 포함한다. 이에 대한 수식은 이하에서 자세히 서술한다.
단계 S130에서, 조향 장치는 복수의 장애물 센서로부터 수신한 장애물 위치 신호를 이용하여 시차 정보를 생성한다.
인간은 사물과의 거리를 시차(parallax)로 인식한다. 여기서, 시차는 사물과 두개의 다른 관찰점으로부터 생성된 직선간에 형성되는 각이다. 이러한 원리가 무인 지상 차량의 실제 진행 방향을 반영하도록 수정되어 본 명세서에 적용된다.
여기서, 시차 정보는 무인 지상 차량의 네 정점의 진행 방향각, 무게 중심의 진행 방향각, 요각(yaw angle), 속력 등을 고려하여 인간의 시각과 같은 정보를 포함할 수 있다.
단계 S140에서, 시차 정보를 이용하여 장애물을 회피하는 제2 경로를 설정한다. 이후 무인 지상 차량은 생성된 제2 경로를 이용하여 운행되도록 한다.
도 2는 상술한 조향 방법을 수행하는 차량의 조향 장치(210)의 블록 구성도이다. 도 2를 참조하면, 경로 설정부(212), 장애물 센서(214), 시차 정보 생성부(216)가 도시된다.
경로 설정부(212)는 무인 지상 차량의 출발 지점과 목표 지점을 이용하여 제1 경로를 설정하고, 시차 정보를 이용하여 장애물을 회피하는 제2 경로를 설정한다.
장애물 센서(214)는 차량의 진행 시 상기 장애물을 감지하여 생성한 장애물 위치 신호를 생성한다. 장애물 센서(214)는 무인 지상 차량의 표면에 여러 개 탑재될 수 있으며, 특히 그 정점(예를 들면, 차량이 사각형인 경우 각 모서리)에 위치할 수 있다.
시차 정보 생성부(216)는 장애물 위치 신호를 이용하여 시차 정보를 생성하고, 시차 정보를 경로 설정부(212)에 전송한다.
이러한 조향 방법은 타이어 모델과 결합된 무인 지상 차량의 궤도 생성에 대한 모델 예측 기법을 이용한다. 장애물과의 충돌을 피하면서 최적의 궤도를 찾는 문제는 여러 제한들을 가지지만, 비용 최소화라는 관점에서 공식화된다. 장애물에 대한 정보는 제한된 센싱 범위안에서 인지되는 경우 비선형 모델 예측 구조안에서 온라인상으로 통합된다.
이러한 설정하에서, 궤도 계산은 글로벌 경로 생성과 로컬 경로 생성으로 나뉜다. 전제적인 문제는 비선형 프로그램과 관련되어 실시간으로 해결된다. 새로운 장애물의 감지시 로컬 경로 재생산에 대하여 장애물 정보를 이용하는데 두가지 방법으로 비용 함수가 증가한다. 첫 번째 방법은 무인 지상 차량과 가장 근접하여 감지된 장애물과의 거리를 그 차량의 속력에 가중치를 두어 이용한다. 두 번째 방법에서는, 감지된 장애물의 시차 정보가 이용되며, 이는 무인 지상 차량의 움직임 방향을 통합하면서 수정된다. 수행 비교를 위해서, 계산 효율, 경로 길이, 에너지 소비 및 최종 시간이 각각의 방법에 대해서 평가된다. 여러 환경에서의 시뮬레이션 결과는 수정된 시차 방법이 거리 기반 방법에 비해 향상된 결과를 보여주며, 차량의 형상 또는 크기와 상태 변수를 고려하면서 무인 지상 차량에 장애물의 위협을 효율적으로 반영함을 보여준다.
이하에서는, 본 발명의 바람직한 실시예들을 상세히 설명하기에 앞서 타이어 모델과 결합된 비선형 무인 지상 차량 모델, 기본적인 모델 예측 제어 공식과 알고리즘, 전체적인 경로 생성 프로세스를 위한 구조를 먼저 설명하기로 한다.
도 3을 참조하여 이륜 차량 모델에 대한 역학을 설명한다. 다음 첨자들은 명세서 전체에서 변수들에 사용된다.
()f : 앞바퀴(320),
()r : 뒷바퀴(330),
()x : 차량 좌표계의 x 축,
()y : 차량 좌표계의 y 축,
()X : 관성 기준 좌표계의 x 축,
()Y : 관성 기준 좌표계의 y 축,
()s : 측면 방향,
()l : 길이 방향,
()k : k번째 시간 스텝,
()ref : 기준 신호,
외부 어플리케이션에서, 사륜 모델이 더 좋은 안정성을 가지기 때문에, 일륜 차량보다 더 바람직하다. 이 명세서에서, 사륜 모델로부터 단순화된 이륜 모델이 타이어 모델과 관련하여 고려된다. 이러한 이륜 모델에서는, 차량의 움직임이 무인 지상 차량의 무게 중심(310)에 가해지는 힘 Fx, Fy와 모멘텀 Mz 의 함수이다.
방정식(1)은 차량의 역학을 기술하며, 여기서, m과 Izz 는 각각 차량의 질량과 관성 모멘트이다. 도 3에 도시된 바와 같이,
는 원점이 차량의 무게 중심(310)과 일치하는 차량의 좌표계의 x축과 관련된 속도의 방향이다.
는 관성 좌표계의 요각(yaw angle)이고,
는 그 차량의 무게 중심(310)의 속력이다.
도 3에서 힘과 모멘텀의 평형에 대한 방정식은 방정식(2)의 기하학적인 관계 를 생성한다. 여기서,
는 앞 조종 각이다.
,
,
및
은 각 타이어에 가해지는 측면 및 길이 방향의 타이어 힘이다.
과
은 각각 앞바퀴 및 뒷바퀴와 차량의 무게 중심(310)으로부터의 거리이다.
각각 타이어에 대한 길이 방향과 측면 타이어 힘은 다음과 같이 슬립각(slip angle :
), 슬립율(slip ratio :
), 도로 마찰계수(
) 및 전체 수직 하중
의 비선형 함수로 주어진다.
여기서, 슬립율(
)은 다음과 같이 정의된다.
은 타이어 중심의 길이방향 속도이고,
은 타이어의 유효 반지름이며,
는 타이어의 각속도이다. 그리고 앞 타이어 슬립각과 뒤 타이어 슬립각은
이며, 이들은 다음과 같이
,
,
의 함수로 표현된다.
수직 하중
은 차량의 기하학 구조에 의존하여 다음과 같이 앞바퀴와 뒷바퀴 사이에 분배된다.
관성 좌표계에서 차량의 무게 중심(310)의 움직임은 다음과 같이 표현된다.
방정식(3)의 타이어 힘에서, Pacejka의 MAGIC formula(Bakker 등 (1987))에 의해 기술되는 타이어 모델이 사용된다. 이 모델은 브레이크와 조종 조건과 결합된 길이 방향 및 측면의 타이어 힘들 사이의 상호 작용을 고려하는 복잡한 반경험적 관계를 표현한다.
슬립율(s)과 관련된 길이 방향의 타이어 힘과 다른 레벨의
을 가지는 앞바퀴 슬립각(
)에 상응하는 측면 타이어 힘을 살펴보면, ±슬립각 안에서, 비선형 및 선형 측면 타이어 모델(side tire model)은 본질적으로 서로 일치한다. 따라서 비선형 측면 타이어 모델 대신, 슬립각의 제한된 범위내에서 다음과 같은 직선 근사치가 사용될 수 있다.
계산상 효율적인 모델을 사용하여 무인 지상 차량의 역학적 특징을 반영하기 위해서, 다음과 같은 단순화가 비선형 이륜 모델에 만들어진다.
이를 이용하면, 방정식(1)은 다음과 같이 된다.
위 가정들을 이용하면, 방정식(2), (5) 및 (7)은 각각 다음과 같이 될 수 있다.
이후 방정식(8) 내지 (12)로부터 다음과 같은 부분 비선형 아핀(affine) 모델이 제시된다.
여기서, 상태와 제어 입력 벡터는 각각
와
이다. 그리고 출력 벡터
는 관성 좌표계에서 무인 지상 차량의 무게 중심(310)의 위치이다.
검증을 위해, 단순화된 모델(방정식(13))은 비선형 측면 타이어 모델과 결합된 완전한 비선형 이륜 모델(방정식(1) 내지 (7))과 비교된다. 동일한 초기 속도를 가지는 순전히 부분적인 비선형 이륜 모델에 대해서 처음 5초 동안, 앞 조종각에 3 °가 적용되고 나머지 5초 동안은, 앞 조종각에 -3°가 적용된다.
선형화된 타이어 모델에 귀착된 명령이 변화할 때 서로 다른 측면 타이어 힘들에도 불구하고, 이에 상응하는 궤적들은 비례 상수(
,
)의 적절한 조율에 의해 서로 유사하다.
이산 시간 도메인 실행에 있어서, 무인 지상 차량 역학 방정식(13)은 다음과 같인 이산화된다.
모델 예측 제어는 다음과 같은 등식 및 부등식의 제한을 받는 비용(cost) 함수를 최소화시키며, 각 시간 스텝(t)에서 퇴행 수평 원리(receding horizon principle)를 가지는 최적의 제어 입력 시퀀스를 계산한다.
여기서,
이다. t는 현재 시간,
은 예지된 수평 길이이며, k는 예지된 수평선의 시간 스텝이고, sat 첨자는 포화 제한(saturation constraint)을 의미한다.
방정식(16)은 무인 지상 차량 역학을 의미하는 등식 조건이다. 방정식(17)과 (18)은
와
에 대한 제한을 나타낸다. 방정식(19)과 (20)은 선형화된 측면 타이어 모델에 대한 것이다. 추적을 위한 비용 함수는 다음과 같다.
여기서,
는
로 정의되며,
는 오프라인에서 계획된 기준 궤도이다.
및
은 일정한 가중 행렬이다.
방정식(22)은 마지막 단계에서의 일탈에 대한 식이다. 방정식(23)의 첫 번째 항은 원하는 기준으로부터의 일탈에 대한 페널티에 대한 것이며, 두 번째 항은 최소 에너지 소비의 관점에서 큰 제어 신호에 대한 페널티에 대한 것이다.
등식과 부등식 제한들은 다음과 같이 증가된 비용 함수에 통합된다.
여기서,
는 라그랑즈 멀티플라이어(Lagrange multiplier),
는 포화 제한(saturation constraint)을 위한 가중 매개 변수를 나타내는 KKT(Karush-Kuhn-Tucker) 변수이다. 방정식(17) 내지 (20)으로부터
은 다음과 같이 정의된다.
이러한 증가된 비용 함수(방정식(24) 내지 (28))와 함께 온라인 최적화는 종래에 제시된 그라디언트 연구를 이용하여 수행될 수 있으며, 이에 대한 자세한 설명은 생략한다.
무인 지상 차량은 자신의 상태 변수들, 제어 입력 명령 및 출력 변수를 정확히 측정할 수 있다고 가정한다. 미지의 환경에서, 무인 지상 차량은 출발 지점과 목표 지점만을 포함하고 장애물의 위치를 포함하지 않는 제한된 정보를 가지고 있다. 이러한 상황에서, 무인 지상 차량은 오로지 센서 데이터만을 이용하여 충돌없이 출발 지점으로부터 목표 지점까지 운행될 것이 요구된다.
이 명세서는 주로 조종에 관심이 있으므로, 무인 지상 차량의 앞, 좌측 및 우측면에 부착된 범위 센서가 사용된다. 이러한 영역에 위치한 장애물은 바이너리 정보로 인지될 수 있다.
궤도 생성 과정은 글로벌 경로(또는 제1 경로) 및 로컬 경로(또는 제2 경로)를 기획하는 궤도 생성 과정으로 나뉠 수 있다. 최초 무인 지상 차량은 알려진 목표 지점과 출발 지점을 가지고 출발하며 오프라인의 글로벌 궤도를 생성한다. 글로벌 경로 계산 프로세스를 위해 방정식(24)에 통합되는 추가적인 비용 함수 항이 이하에서 제시된다.
목표 지점으로 가면서, 센서 데이터는 장애물들을 감지하면서 변화하고, 이 러한 정보를 가지고 무인 지상 차량은 장애물을 회피하면서 로컬 궤도를 재생성한다. 이러한 과정을 위해서, 로컬 경로 계산을 위한 추가적인 비용 함수 항들이 제시된다.
알려진 환경에서의 추적을 위해서 기준 궤도들이 시간 함수로 자주 표현된다. 상술한 설정들에서는, 단지 일정한 속력에서의 능동 조종만이 이용가능하고, 미리 알려지지 않은 장애물의 출현에 의해 기준 궤도로부터의 이탈이 축적되기 때문에 글로벌 기준 경로로서 정해진 시간 함수를 이용하는 것은 바람직하지 않다.
도 4를 참조하면, 이러한 이유 때문에, 시간 t,
에서의 기준 궤도는 출발 지점
(410)과 목표 지점
(420)를 연결하는 다음과 같은 직선으로 생성된다.
도 4를 참조하면,
는 차량의 기준 방향각이고, 각 시간 스텝에서,
는 현재 좌표
에서 가장 가까운 직선상의 점의 X 좌료로 얻어진다.
무인 지상 차량을 해저드에 의해 재처리하지 않고 목적 지점에 잘 진행시키기 위해서는 다음과 같은 항이 방정식(24)에 추가될 수 있다.
여기서,
은 가중 매개 변수(weighting parameter)이다. 이 접근법과 전통적인 포텐셜 필드 접근법의 차이점은 퇴행 수평(receding horizon) 구조의 최적화에 있다. 이러한 사실은 후술하는 바와 같이 큰 차이점을 가지는 결과를 가진다.
제한된 범위의 센서 정보를 이용하여 안전한 궤도를 재생성하기 위해서 방정식(24)은 로컬 경로 재계획 단계에서 조정될 수 있다. 무인 지상 차량 역학은 비홀로노믹(nonholonomic)하며, 도시와 같이 알기 어려운 환경에서는 무인 지상 차량의 형상 또는 크기가 중요한 이슈가 된다. 한편, 차량이 큰 속력으로 움직일 때 제한된 범위의 센서를 이용하여 장애물을 회피하는 것은 더욱 어려워진다. 이러한 이유 때문에 차량을 한 점으로 취급하고 단지 차량의 무게 중심과 장애물간의 거리를 이용하는 것은 좋은 결과를 얻지 못한다.
여기서는 로컬 장애물 회피를 위한 두가지 접근 방법이 제시된다. 첫 번째 접근 방법에서는 차량과 장애물간의 최소 거리를 이용하며 차량의 속력에 가중치가 주어진다. 두 번째 접근 방법에서는, 차량의 형상 또는 크기가 시차 정보를 이용함 으로서 고려된다.
거리 기반 접근 방법에서는, 차량에서 감지된 장애물의 거리 정보를 이용하는 포텐셜과 같은 비용 함수가 사용되며, 이는 장애물들로부터 반발되는 영역을 생성하기 위해서 방정식(24)에 더해진다.
시간 (k, t)에서, 차량이
에 위치한다고 가정한다.
도 5를 참조하면, 관성 좌표계(510), 차량 좌표계(530)에서 무인 지상 차량(530)에 탑재된 센서들(535)과 그 센서 범위안에 감지되는 장애물들(540, 545) 사이에서,
는 시간
에서 무인 지상 차량(530)의 j번째 센서와 i 번째 감지된 장애물(540)간의 거리로 도시된다.
종래 접근 방법을 확장하여 무인 지상 차량(530)의 속력을 고려하면 다음과 같은 방정식이 도출될 수 있다.
여기서,
와
는 가중 매개 변수이며,
는 무인 지상 차량(530)의 속력과 관련되어 정의된 중요 거리(critical distance)이고,
은 분모가 0이 되지 않도록 하는 작은 양의 상수이다.
방정식(32)은 상태 변수들간에
,
및
의 정보를 포함한다. 차량의 형상 또는 크기가 고려됨에도 불구하고, 이러한 접근법은 차량의 실제 진행 방향보다는 현재 방향 각(heading angle)을 포함한다.
이하에서는 도 6을 참조하여 수정된 시차 기반 접근법을 상술한 바와의 차이점을 위주로 설명한다. 도 6을 참조하면, 무인 지상 차량의 무게 중심(537), 무인 지상 차량의 전면 센싱 범위(610), 좌측 센싱 범위(620), 우측 센싱 범위(630), 전면 장애물(615) 및 측면 장애물(635)이 도시된다.
장애물 i와 j가 시간
에서 전면과 측면의 센싱 범위(610, 630)안에서 각각 감지되고 그들의 좌표값은
와
라고 가정한다.
이후 각각 전면 센싱 범위(610)에서 감지된 i번째 장애물과 측면 센싱 범위(630)에서 감지된 j번째 장애물의 좌표인
와
는 다음과 같이 차량 좌표계에서 결정된다.
도 6을 참조하면,
,
,
및
은 각 정점에서 장애물을 보는 시선의 라인과 앞면 및 뒷면간의 각들이다. 그리고
,
,
및
은 무인 지상 차량의 네 정점의 진행 방향각을 나타낸다.
이들은 다음과 같은 관계를 가질 수 있다.
이후 다음과 같이 정의된 수정된 시차(MP)는 무인 지상 차량(530)의 네 정점의 진행 방향과 통합된다.
방정식(33)에 의해 계산된
,
와 함께, 다음과 같은 포텐셜같은 비용 함수(또는 시차 비용 함수)가 만들어진다.
위 방정식(34)에서, 첫 번째는 센싱 범위에 장애물이 없는 경우이며, 두 번째는
가 센싱 범위에 있는 경우이고, 세 번째는
가 센싱 범위에 있는 경우이고, 네 번째는
와
가 모두 센싱 범위에 있는 경우이다. 여기서,
와
는 다음과 같이 정의된 중요한 수정된 시차값들이다.
여기서,
와
은 가중치이다. 방정식(35)은 위협도(degree of threat)를 공식화함에 있어서, 높은 속력에서 회전하기 어려운 점을 반영한다. 방정식(34)은 더 높은 수정된 시차값에 대한 페널티를 나타낸다.
두개의 장애물이 동일한 시차에 위치하여도, 방정식(34)을 이용하여 수정하면 무인 지상 차량(530)의 네 정점의 실제 진행 방향과 관련된 서로 다른 위협 수준이 반영된다. 더욱이, 방정식(34)은 상태 변수(
,
,
와 무게 중심 위치)에 대한 풍부한 정보를 포함한다.
이하에서는 상술한 알고리즘을 이용한 수치 해석 시뮬레이션 결과를 제시한다.
제안된 접근법의 성능을 테스트하기 위해서 테이블 1에 주어진 설정을 이용하여 수치 해석 시뮬레이션이 수행된다. 이후 보다 단순한 환경에서의 운행이 제시되고 그 후 보다 복잡한 환경이 궤도 공간으로서 제시된다.
제안된 모델 예측 구조의 성능은 다음과 같은 성능 메트릭을 이용하여 포텐셜 필드 접근법과 비교된다.
여기서,
은 궤도 길이이며,
는 소비된 에너지이다. 여기서,
는 무인 지상 차량이 목표 지점에 도달하는 시간을 나타낸다. 궤도의 모든 점에서, 출발 지점과 목표 지점을 연결하는 녹색 점선은 오프라인에서 계획된 글로벌 기준 궤도를 나타낸다.
| 수평 길이( ) |
40 |
| 샘플링 시간( ) |
0.05초 |
| 속력( ) |
3m/s |
| 제어 명령 한계(control command limit) |
-60°/초 ≤ ≤ 60°/초 |
| 조종 각 한계(steering angle limit) |
-30° ≤ ≤ 30 ° |
| 타이어 한계의 슬립각 |
-2° ≤ ≤ 2° |
| 무인 지상 차량의 스펙 |
m = 807 kg, Izz = 429.649 kg m2 |
| 무인 지상 차량의 차폭 및 길이 |
1.290 m(W) × 2.150 m(L) |
| 차축 길이 |
= 0.835 m, = 0.715 m |
| 전면 센싱 범위 |
(5m + W/2 )의 반지름의 반원 |
| 각 측면 센싱 범위 |
(길이=Ls, 폭=5m)인 직사각형 |
| 초기 상태 변수들 |
|
표 1. 시뮬레이션을 위한 수치 설정
도 7 내지 도 9는 각각 본 발명의 실시예에 따른 수치 해석 시뮬레이션 결과를 제시하는 도면이다.
도 7 및 도 8에 도시된 시나리오를 참조하면, 블록간의 거리는 10m이고, 이러한 공간에서는 무인 지상 차량이 통과하는데 문제가 없다.
모델 예측 제어(model predictive control : MPC) 기법과 표준 포텐셜 필드 기법을 각각 이용하면서, 방정식(32)과 (34)의 거리 기반 및 수정된 시차(MP) 기반 방법들이 실행된다.
도 7은 MPC와 포텐셜 필드 구조에서 실행된 가중된 거리 기반 방법들의 결과 를 보여준다. 도 7을 참조하면, 가중된 거리 방법을 이용한 운행이 제시되면, (a) 결과적인 궤도, (b) 계산 시간(상부 : 포텐셜 필드 기법, 하부 : MPC 기법), (c) 제어 입력 명령, (d) 전면 조종각, (e) 무게 중심의 슬립각, (f) 요각에 대한 결과가 제시된다. 모든 점에서 붉은 점선은 포텐셜 필드 기법이고, 파란 실선은 MPC 기법에 대해 나타낸다. (c)와 (d)에서, 검은 점선 라인은 포화값을 나타낸다.
파란 실선이 MPC 구조의 결과들이며, 이는 방정식(32)을 방정식(24)에 더하여 통합시킨다. 모든 지점에서 붉은 점선은 포텐셜 필드 기법의 결과들이며, 이는 방정식(32)을 포텐셜 함수로 사용한다.
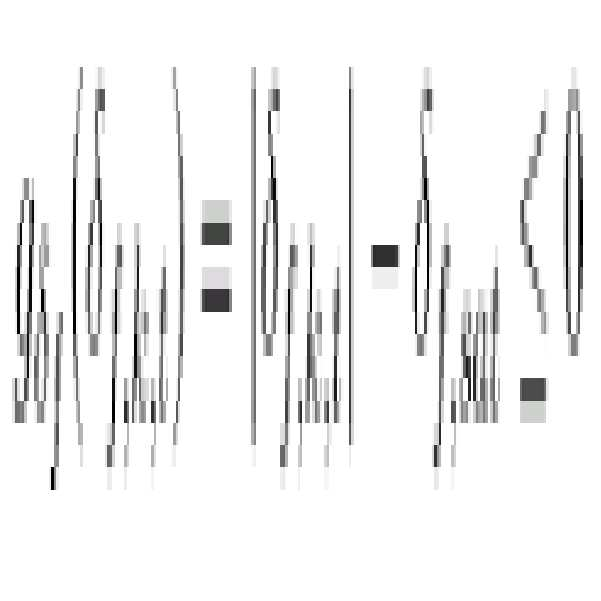
도 8은 무인 지상 차량의 형상 또는 크기를 고려하여 방정식(34)이 방정식(24)에 실행된 MP 기반 방법의 결과들이다. 도 8을 참조하면, MP 방법을 이용한 운행이 제시된다. (a) 결과적인 궤도, (b) 계산 시간(상부 : 포텐셜 필드 기법, 하부 : MPC 기법), (c) 제어 입력 명령, (d) 전면 조종각, (e) 무게 중심의 슬립각, (f) 요각에 대한 결과가 제시된다. 모든 점에서 붉은 점선은 포텐셜 필드 기법이고, 파란 실선은 MPC 기법에 대해 나타낸다. (c)와 (d)에서, 검은 점선 라인은 포화값을 나타낸다.
포텐셜 필드 기법을 사용하는 MP 기반 방법을 제외한 모든 경우, 성공적인 충돌 회피 궤도가 얻어진다. 그리고
은 주어진 포화값안에 유지된다. 결과 성능 지수는 아래와 같은 테이블 2에서 기재된다.
| Index |
Lt,dist |
Lt,Parallax |
Edist |
EParallax |
tf,dist |
tf,Parallax |
| PF |
159.47 m |
failed |
99.70 |
failed |
52.95초 |
failed |
| MPC |
140.66 m |
138.21 m |
18.54 |
15.43 |
46.80초 |
46.00초 |
테이블 2. 궤도의 전체 길이, 소비 에너지 및 터미널 시간에 대한 성능 비교
도 7(b)에서, MPC 기법의 거리 기반 방법은 포텐셜 함수 기법보다 더 긴 계산 시간을 요구한다. 그러나 테이블 2에 나타난 바와 같이 얻은 궤도에 대해서는 길이, 제어 에너지, 터미널 시간에서 MPC 기법이 보다 좋은 결과를 나타낸다.
MPC 기법을 가진 수정된 시차 기반 방법에 있어서, 계산 효율과 생성된 궤도의 부드러움에 있어서 그 결과들은 만족스럽다. 반면, 시차 기반 포텐셜 필드 기법에서는 장애물과의 충돌이 발생한다.
MPC 설정에서 거리 기반 및 MP 기반 방법을 비교하면, 생성된 궤도가 명확하게 구별되지는 않는다. 그러나 MP 기반 방법에 있어서, 보다 계산 효율이 증가된 상태에서 더 낮은 에너지 소비와 더 짧은 터미널 시간 안에 더 짧은 경로가 얻어진다.
방정식(34)에 있어서, 로컬 경로 재생성에서의 페널티 비용은 차량과 장애물간 상대적인 위치, 순간적인 방향, 속도 및 차량 정점의 실제 진행 방향에 의존한다. 장애물로부터의 거리정보가 직접적으로 포함되지 않더라도, 차량의 전면 및 뒷면으로부터 정의된 방정식(33)의 수정된 시차값은 해저드의 정도를 효과적으로 표현하고 가능한 안전한 경로 재생성을 표현한다.
이하에서는, 제안된 알고리즘이 보다 복잡한 환경에서 테스트되며 안전성과 상대적 최적화의 관점에서 비교된다. 다각형 및 원형의 블록을 포함하는 영역이 가정된다. 블록간의 거리는 무인 지상 차량에게 보다 비좁은 5m 이며, 또한 차량 속도에 비해 짧은 센싱 범위가 된다.
시뮬레이션이 MPC 기법에서 두가지 다른 방법(가중된 거리 기반 또는 수정된 시차 기반)으로 수행되었다. 그리고 거리 기반 방법을 가진 포텐셜 기법의 결과가 비교된다.
도 9는 이들 세가지 방법의 결과를 도시한다. 도 9를 참조하면, 차량의 형상 또는 크기를 이용한 주행이 제시된다. (a) 결과적인 궤도들, (b) 계산 시간(첫 부분 : 포텐셜 필드 기법을 가지는 거리 기반 방법, 둘째 부분 : MPC를 가지는 거리 기반 방법, 셋째 부분 : MPC를 가지는 MP 기반 방법), (c) 제어 입력 명령, (d) 전면 조종각, (e) 무게 중심의 슬립각, (f) 요각에 대한 결과가 제시된다. 모든 점에서 녹색 선은 포텐셜 필드를 가지는 거리 기반 방법이고, 붉은 점선은 MPC를 가지는 거리 기반 방법이며, 파한 실선은 MPC를 가지는 MP 기반 방법이다. (c)와 (d)에서, 검은 점선 라인은 포화값을 나타낸다.
붉은 선과 파란 선은 각각 MPC 기법을 가지는 거리 기반 및 MP 기반 방법의 결과들이다. 그리고 녹색 선은 거리 기반 포텐셜 필드 기법의 결과이다.
MPC를 가진 MP 기반 방법에서는, 장애물과의 충돌은 없었다. 그러나 거리 기반 방법에서는 [70 m, 45 m]에 중심이 있는 원형 블록과의 접촉이 MPC와 포텐셜 필드 기법들에서 일어났다. 모든 경우에 제한 사항은 만족되었다.
아래의 테이블 3은 성능 지수 결과를 보여준다.
| Index |
Lt,dist |
Lt,Parallax |
Edist |
EParallax |
tdist |
tParallax |
| PF |
185.74 m |
- |
361.43 |
- |
61.55초 |
- |
| MPC |
150.81 m |
147.93 m |
33.13 |
30.93 |
50.10초 |
49.15초 |
테이블 3. 복잡한 환경에서 궤도의 전체 길이, 소비된 에너지 및 터미널 시간의 성능 비교
포텐셜 필드 기법에서, 궤도와 성능 지수는 낮았다. MPC 기법에서, MP 기반 방법은 거리 기반 방법보다 다소 좋았다. 그러나 도 9(b)를 참조하면, 거리 기반 방법에 대한 MP 기반 방법의 장점은 50분의 1정도로 줄어든 계산량에서 보다 명확해진다.
보다 단순한 장애물 회피 문제에서는, 무인 지상 차량을 한 점으로 가정하고 거리 기반 포텐셜 함수를 적용하는 종래의 접근법들도 충분할 수 있다. 그러나 로컬 궤도 생성시 로컬 최소화 문제를 회피하고 글로벌 물체를 고려하기 위해서는 예지 능력에 대한 형식이 필요하다.
또한, 복잡하고 좁은 환경에서, 차량의 형상 또는 크기는 반드시 고려되어야 한다. MPC는 복잡한 역학을 가지는 차량의 로컬 궤도 생성을 위해 간편한 설정을 제시한다. 또한, MPC 기법을 가진 MP 기반 방법은 계산 시간 관점에서 거리 기반 MPC 방법보다 더 효과적이다. 실행 관점에서 감지된 장애물에 대한 시차각은 쉽게 측정될 수 있다.
따라서 장애물을 회피하는 동안 최적의 문제가 모델 예측 제어(model predictive control : MPC) 구조에서 제한사항들 하에 비용 최소화라는 관점에서 공식화되었다. 이러한 문제는 비선형 프로그램밍에 의해 해결되고, 제한사항들은 증가된 라그란지안(Lagrangian)에 통합되었다.
로컬 경로 계획 단계는 장애물에 대한 정보를 이용하고, 이러한 장애물은 차량에 탑재된 제한된 범위의 센서들에 의해 감지된다. 로컬 경로 재생산의 실행을 위해, 속도가 고려된 거리 기반 방법과 시차 기반 방법이 제안되었다.
복잡한 환경에서 장애물을 회피하기 위해서는 무인 지상 차량의 형상 또는 크기가 고려된다. 포텐셜 필드 기법에 의해 궤도 재생성을 위한 빠른 계산이 가능하다. 하지만 이에 따르면, 로컬 최소화에 의해 장애물과의 충돌이 발생할 수 있고, 터미널 시간과 에너지 소비와 같은 성능 지수들이 낮다. MPC 기법의 결과들은 거리 기반 방법의 응용이 복잡한 환경에서 너무 많은 계산 부담을 요구할 수 있음을 보여준다.
반면, 수정된 시차(modified-parallax : MP) 기반 로컬 경로 생성은 무인 지상 차량에 대한 풍부한 정보(형상, 크기, 속도 및 실제 진행 방향 등)를 효과적으로 이용한다. 또한, 이에 따르면, 높은 계산 효율이 나타나며, 경로 길이, 에너지 소비 및 터미널 시간에서 최적화된 특징이 나타난다.
따라서 제안된 MP-MPC 기법은 복잡한 환경에서 무인 지상 차량의 실시간 장 애물 회피에 대한 좋은 해결책을 제시한다.
그 외 본 발명의 실시예에 따른 차량의 조향 방법 및 그 장치에 대한 구체적인 핸들링 시스템, 임베디드 시스템, O/S 등의 공통 플랫폼 기술과 통신 프로토콜, I/O 인터페이스 등 인터페이스 표준화 기술 및 엑추에이터, 배터리, 카메라, 센서 등 부품 표준화 기술 등에 대한 구체적인 설명은 생략하기로 한다.
상술한 본 발명의 실시예에 따른 차량의 조향 방법은 기록매체에 저장된 후 소정의 장치, 예를 들면, 차량의 전자 시스템과 결합하여 수행될 수 있다. 여기서, 기록매체는 하드 디스크, 비디오 테이프, CD, VCD, DVD와 같은 자기 또는 광 기록매체가 될 수 있다.
상기에서는 본 발명의 바람직한 실시예를 참조하여 설명하였지만, 해당 기술 분야에서 통상의 지식을 가진 자라면 하기의 특허 청구의 범위에 기재된 본 발명의 사상 및 영역으로부터 벗어나지 않는 범위 내에서 본 발명을 다양하게 수정 및 변경시킬 수 있음을 이해할 수 있을 것이다.













































 여기서, L은 상기 차량의 차축 길이, W는 상기 차량의 폭,,
여기서, L은 상기 차량의 차축 길이, W는 상기 차량의 폭,, ,
, 및
및 은 각각 상기 차량의 네 정점의 진행 방향각,
은 각각 상기 차량의 네 정점의 진행 방향각, 는 상기 차량의 무게 중심의 진행 방향각,
는 상기 차량의 무게 중심의 진행 방향각, 는 요각(yaw angle),
는 요각(yaw angle), 는 상기 차량의 속력.
는 상기 차량의 속력.
 여기서,는 시간 t에서의 상태 변수 벡터,
여기서,는 시간 t에서의 상태 변수 벡터, 는 제어 입력 벡터,
는 제어 입력 벡터, ,
, (
( 및
및 은 일정한 가중 행렬(constant weighting matrices),
은 일정한 가중 행렬(constant weighting matrices), 은 예지된 수평 길이,
은 예지된 수평 길이, ,
, 는 상기 제1 경로의 좌표,
는 상기 제1 경로의 좌표, 는 관성 좌표계에서 상기 차량의 무게 중심의 좌표)
는 관성 좌표계에서 상기 차량의 무게 중심의 좌표)
 여기서,,
여기서,,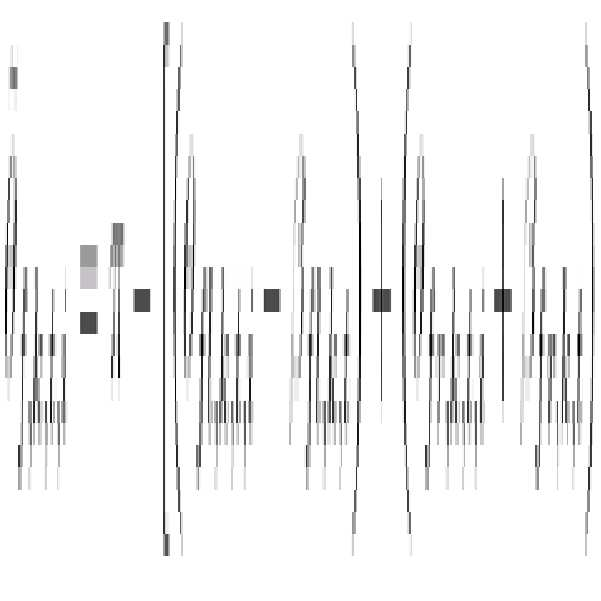 ,
, ,
, ,
, 은 가중 매개 변수,
은 가중 매개 변수, 와
와 은 가중치,
은 가중치, 는 시간 t에서 전방 센싱 범위안에서 감지된 i번째 장애물 좌표,
는 시간 t에서 전방 센싱 범위안에서 감지된 i번째 장애물 좌표, 는 시간 t에서 측면 센싱 범위안에서 감지된 j번째 장애물 좌표, L은 상기 차량의 차축 길이, W는 상기 차량의 폭,
는 시간 t에서 측면 센싱 범위안에서 감지된 j번째 장애물 좌표, L은 상기 차량의 차축 길이, W는 상기 차량의 폭, ,
, ,
, 및
및 은 각각 상기 차량의 네 정점의 진행 방향각,
은 각각 상기 차량의 네 정점의 진행 방향각, 는 상기 차량의 무게 중심의 진행 방향각,
는 상기 차량의 무게 중심의 진행 방향각, 는 요각(yaw angle),
는 요각(yaw angle), 는 상기 차량의 속력.
는 상기 차량의 속력.
 여기서,는 라그랑즈 멀티플라이어,
여기서,는 라그랑즈 멀티플라이어, 는
는 에 대한 관성 좌표계에서의 상기 차량의 무게 중심의 좌표,
에 대한 관성 좌표계에서의 상기 차량의 무게 중심의 좌표, 는 포화 제한(saturation constraint)을 위한 가중 매개 변수를 나타내는 KKT(Karush-Kuhn-Tucker) 변수,
는 포화 제한(saturation constraint)을 위한 가중 매개 변수를 나타내는 KKT(Karush-Kuhn-Tucker) 변수, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, 는 상기 차량의 앞 조종 각,
는 상기 차량의 앞 조종 각, 는 각각 상기 차량의 앞 타이어 슬립각과 뒤 타이어 슬립각, sat 첨자는 포화 제한을 의미함.
는 각각 상기 차량의 앞 타이어 슬립각과 뒤 타이어 슬립각, sat 첨자는 포화 제한을 의미함.
 여기서, L은 상기 차량의 차축 길이, W는 상기 차량의 폭,,
여기서, L은 상기 차량의 차축 길이, W는 상기 차량의 폭,, ,
, 및
및 은 각각 상기 차량의 네 정점의 진행 방향각,
은 각각 상기 차량의 네 정점의 진행 방향각, 는 상기 차량의 무게 중심의 진행 방향각,
는 상기 차량의 무게 중심의 진행 방향각, 는 요각(yaw angle),
는 요각(yaw angle), 는 상기 차량의 속력.
는 상기 차량의 속력.
 여기서,는 시간 t에서의 상태 변수 벡터,
여기서,는 시간 t에서의 상태 변수 벡터, 는 제어 입력 벡터,
는 제어 입력 벡터, ,
, (
( 및
및 은 일정한 가중 행렬(constant weighting matrices),
은 일정한 가중 행렬(constant weighting matrices), 은 예지된 수평 길이,
은 예지된 수평 길이, ,
, 는 상기 제1 경로의 좌표,
는 상기 제1 경로의 좌표, 는 관성 좌표계에서 상기 차량의 무게 중심의 좌표)
는 관성 좌표계에서 상기 차량의 무게 중심의 좌표)
 여기서,,
여기서,, ,
, ,
, ,
, 은 가중 매개 변수,
은 가중 매개 변수, 와
와 은 가중치,
은 가중치, 는 시간 t에서 전방 센싱 범위안에서 감지된 i번째 장애물 좌표,
는 시간 t에서 전방 센싱 범위안에서 감지된 i번째 장애물 좌표, 는 시간 t에서 측면 센싱 범위안에서 감지된 j번째 장애물 좌표, L은 상기 차량의 차축 길이, W는 상기 차량의 폭,
는 시간 t에서 측면 센싱 범위안에서 감지된 j번째 장애물 좌표, L은 상기 차량의 차축 길이, W는 상기 차량의 폭, ,
, ,
, 및
및 은 각각 상기 차량의 네 정점의 진행 방향각,
은 각각 상기 차량의 네 정점의 진행 방향각, 는 상기 차량의 무게 중심의 진행 방향각,
는 상기 차량의 무게 중심의 진행 방향각, 는 요각(yaw angle),
는 요각(yaw angle), 는 상기 차량의 속력.
는 상기 차량의 속력.
 여기서,는 라그랑즈 멀티플라이어,
여기서,는 라그랑즈 멀티플라이어, 는
는 에 대한 관성 좌표계에서의 상기 차량의 무게 중심의 좌표,
에 대한 관성 좌표계에서의 상기 차량의 무게 중심의 좌표, 는 포화 제한(saturation constraint)을 위한 가중 매개 변수를 나타내는 KKT(Karush-Kuhn-Tucker) 변수,
는 포화 제한(saturation constraint)을 위한 가중 매개 변수를 나타내는 KKT(Karush-Kuhn-Tucker) 변수, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, 는 상기 차량의 앞 조종 각,
는 상기 차량의 앞 조종 각, 는 각각 상기 차량의 앞 타이어 슬립각과 뒤 타이어 슬립각, sat 첨자는 포화 제한을 의미함.
는 각각 상기 차량의 앞 타이어 슬립각과 뒤 타이어 슬립각, sat 첨자는 포화 제한을 의미함.