JPWO2020250412A1 - 画像処理装置及び画像処理方法 - Google Patents
画像処理装置及び画像処理方法 Download PDFInfo
- Publication number
- JPWO2020250412A1 JPWO2020250412A1 JP2021525533A JP2021525533A JPWO2020250412A1 JP WO2020250412 A1 JPWO2020250412 A1 JP WO2020250412A1 JP 2021525533 A JP2021525533 A JP 2021525533A JP 2021525533 A JP2021525533 A JP 2021525533A JP WO2020250412 A1 JPWO2020250412 A1 JP WO2020250412A1
- Authority
- JP
- Japan
- Prior art keywords
- image
- value
- input image
- unit
- weight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/387—Composing, repositioning or otherwise geometrically modifying originals
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Image Processing (AREA)
Abstract
Description
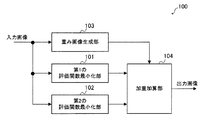
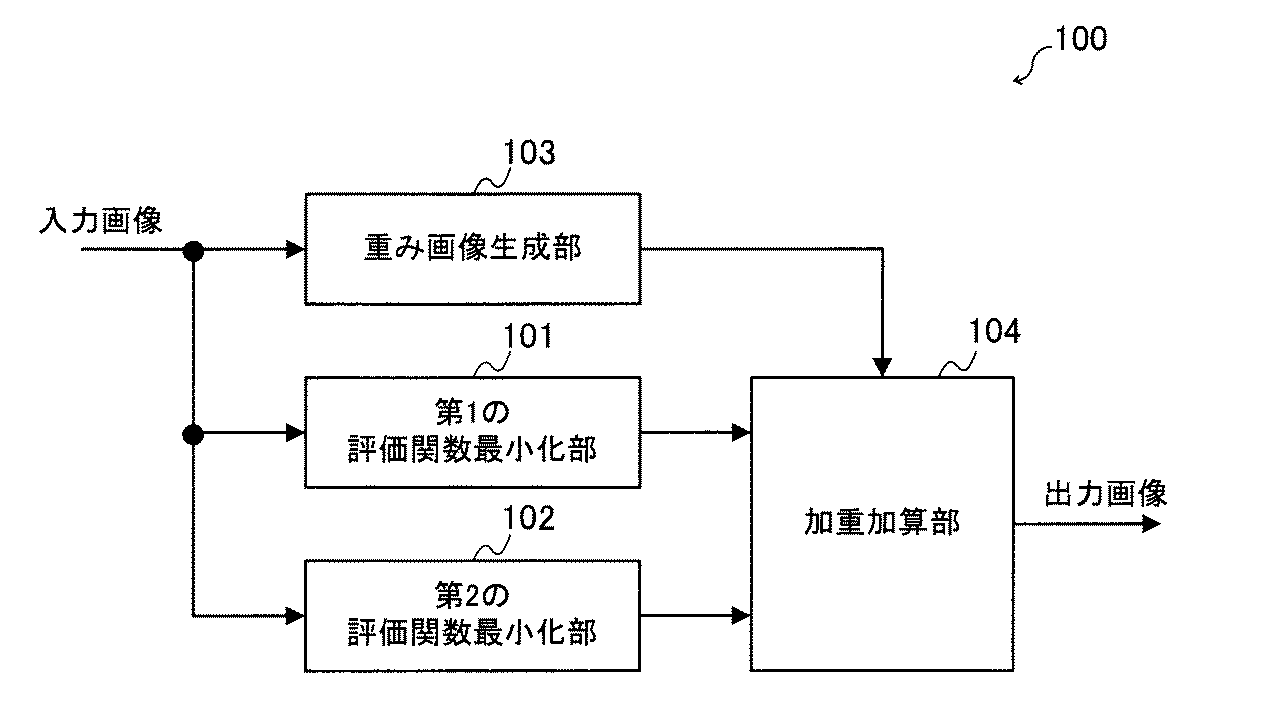
図1は、実施の形態1に係る画像処理装置100の構成を概略的に示すブロック図である。
画像処理装置100は、第1の評価関数最小化部101と、第2の評価関数最小化部102と、重み画像生成部103と、加重加算部104とを備える。
第2の評価関数最小化部102は、入力画像に含まれるボケを補正することで、第2の補正画像を生成する。生成された第2の補正画像は、加重加算部104に与えられる。
ここで、入力画像に含まれるボケの原因としては、入力画像を撮像するための撮像装置であるカメラの光学系によるボケ(光学系ボケ)、又は、入力画像撮像時にカメラが動いてしまうことによるボケ(動きボケ)等がある。
この問題は、数学的には、最適化問題として定義可能で、適切な評価関数を最小化する潜在画像L、又は、潜在画像L及び点像分布関数Kを求めることと等価である。
また、式(2)における第2項は、正規化項に相当する。正規化項は、最適化問題の解に一定の制限を課すための項である。例えば、式(2)の第1項を最小とする潜在画像Lは、複数個存在する。そこで、式(2)の第2項により潜在画像Lに一定の制限を課すことで最適化問題の解を一意に定めることができる。
なお、式(2)の最適化処理は、例えば、特表2016−532367号公報に詳細に記載されている。
ここで、第1の評価関数は、入力画像の1次微分の大きさを表す項に定数(ここでは、第1の定数)を乗じた値を含む評価値を求める関数である。
ここで、第2の評価関数は、入力画像の2次微分の大きさを表す項に定数(ここでは、第2の定数)を乗じた値を含む評価値を求める関数である。
次に、重み画像生成部103は、入力画像の対象画素について求めた分散を0以上1以下の値にマッピングする。なお、マッピングの結果は、分散の値が小さいほど0に近い値をとり、逆に分散の値が大きいほど1に近い値をとるのがよい。
例えば、式(5)に示されているように、重み画像生成部103から出力される重み値が、0以上1以下の値mに制限されている場合、加重加算部104は、下記の式(6)により算出される値D3を、出力画像の画素値として算出することができる。
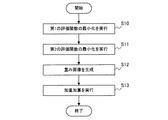
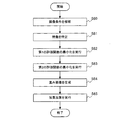
図3に示されているフローチャートは、例えば、入力画像が画像処理装置100の図示しない入力インターフェースに入力された場合、画像処理装置100の図示しない入力装置である入力部がユーザから指示を受けた場合等に開始される。
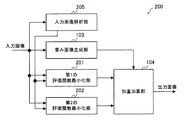
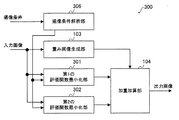
図4は、実施の形態2に係る画像処理装置200の構成を概略的に示すブロック図である。
画像処理装置200は、第1の評価関数最小化部201と、第2の評価関数最小化部202と、重み画像生成部103と、加重加算部104と、入力画像解析部205とを備える。
実施の形態2における重み画像生成部103及び加重加算部104は、実施の形態1における重み画像生成部103及び加重加算部104と同様である。
定数wは、忠実度項と正規化項との間の重みを調整する値であり、定数wの値を大きくするほど、式(2)に占める正規化項の割合が多くなる。
以下、実施の形態2の構成を説明する。
また、入力画像解析部205は、ノイズ量の多さに対し単調増加となるように第1の定数w1及び第2の定数w2を決定してもよい。
通常、ノイズ量は、信号量をノイズ量の分散で割ったS/N比で定義できる。
S/N比が大きいほどノイズ量は少なく、逆にS/N比が小さいほどノイズ量は多くなる。
ここで、実施の形態2においては、第1の評価関数最小化部201は、入力画像解析部205から与えられる第1の定数w1を用いて、上記の式(3)で示される値が最小となるように算出した潜在画像Lを、第1の補正画像とする。
ここで、実施の形態2においては、第2の評価関数最小化部202は、入力画像解析部205から与えられる第2の定数w2を用いて、上記の式(4)で示される値が最小となるように算出した潜在画像Lを、第2の補正画像とする。
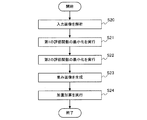
図5に示されているフローチャートも、例えば、入力画像が画像処理装置200の図示しない入力インターフェースに入力された場合、画像処理装置200の図示しない入力装置である入力部がユーザから指示を受けた場合等に開始される。
なお、式(3)における第1の定数W1と、式(4)における第2の定数W2との両方を、上記のようにノイズ量に応じて決定することで、実施の形態2における効果は大きくなるが、式(3)における第1の定数W1及び式(4)における第2の定数W2の何れか一方のみを変化させるだけでも、実施の形態2における効果を得ることができる。
図6は、実施の形態3に係る画像処理装置300の構成を概略的に示すブロック図である。
画像処理装置300は、第1の評価関数最小化部301と、第2の評価関数最小化部302と、重み画像生成部103と、加重加算部104と、撮像条件解析部306とを備える。
実施の形態3における重み画像生成部103及び加重加算部104は、実施の形態1における重み画像生成部103及び加重加算部104と同様である。
また、撮像条件解析部306は、ノイズ量の多さに対し単調増加となるように第1の定数w1及び第2の定数w2を決定してもよい。
ここで、実施の形態3においては、第1の評価関数最小化部301は、撮像条件解析部306から与えられる第1の定数w1を用いて、上記の式(3)で示される値が最小となるように算出した潜在画像Lを、第1の補正画像とする。
ここで、実施の形態3においては、第2の評価関数最小化部302は、撮像条件解析部306から与えられる第2の定数w2を用いて、上記の式(4)で示される値が最小となるように算出した潜在画像Lを、第2の補正画像とする。
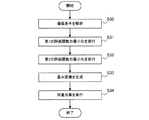
図7に示されているフローチャートも、例えば、入力画像が画像処理装置300の図示しない入力インターフェースに入力された場合、画像処理装置300の図示しない入力装置である入力部がユーザから指示を受けた場合等に開始される。
なお、式(3)における第1の定数W1と、式(4)における第2の定数W2との両方を、上記のようにノイズ量に応じて決定することで、実施の形態3における効果は大きくなるが、式(3)における第1の定数W1及び式(4)における第2の定数W2の何れか一方のみを変化させるだけでも、実施の形態3における効果を得ることができる。
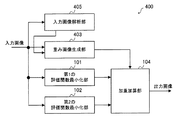
図8は、実施の形態4に係る画像処理装置400の構成を概略的に示すブロック図である。
画像処理装置400は、第1の評価関数最小化部101と、第2の評価関数最小化部102と、重み画像生成部403と、加重加算部104と、入力画像解析部405とを備える。
実施の形態4における第1の評価関数最小化部101、第2の評価関数最小化部102及び加重加算部104は、実施の形態1における第1の評価関数最小化部101、第2の評価関数最小化部102及び加重加算部104と同様である。
閾値εを大きい値に設定すると、重み画像中には、重み値を示す画素値が0に近い画素が増え、出力画像では第1の評価関数最小化部101から出力される第1の補正画像の占める割合が多くなる。
ノイズ量の推定方法については、実施の形態2と同様である。
また、入力画像解析部405は、ノイズ量の多さに対し単調増加となるように閾値εを決定してもよい。
例えば、重み画像生成部403は、上記の式(5)により、重み値mを算出し、画素毎に重み値mを示す重み画像を生成する。ここで、重み画像生成部403は、入力画像解析部405から与えられる閾値εを用いて、重み値mを算出する。そして、生成された重み画像は、加重加算部104に与えられる。
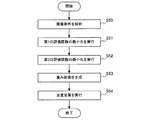
図9に示されているフローチャートも、例えば、入力画像が画像処理装置400の図示しない入力インターフェースに入力された場合、画像処理装置400の図示しない入力装置である入力部がユーザから指示を受けた場合等に開始される。
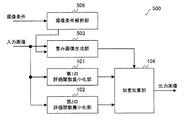
図10は、実施の形態5に係る画像処理装置500の構成を概略的に示すブロック図である。
画像処理装置500は、第1の評価関数最小化部101と、第2の評価関数最小化部102と、重み画像生成部503と、加重加算部104と、撮像条件解析部506とを備える。
実施の形態5における第1の評価関数最小化部101、第2の評価関数最小化部102及び加重加算部104は、実施の形態1における第1の評価関数最小化部101、第2の評価関数最小化部102及び加重加算部104と同様である。
また、撮像条件解析部506は、ノイズ量の多さに対し単調増加となるように閾値εを決定してもよい。
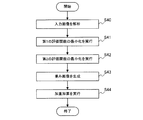
図11に示されているフローチャートも、例えば、入力画像が画像処理装置500の図示しない入力インターフェースに入力された場合、画像処理装置500の図示しない入力装置である入力部がユーザから指示を受けた場合等に開始される。
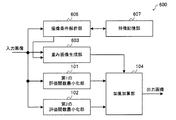
図12は、実施の形態6に係る画像処理装置600の構成を概略的に示すブロック図である。
画像処理装置600は、第1の評価関数最小化部101と、第2の評価関数最小化部102と、重み画像生成部603と、加重加算部104と、撮像条件解析部606と、特徴記憶部607とを備える。
実施の形態6における第1の評価関数最小化部101、第2の評価関数最小化部102及び加重加算部104は、実施の形態1における第1の評価関数最小化部101、第2の評価関数最小化部102及び加重加算部104と同様である。
逆に、砂漠又は海上といった自然物が多い地形では輝度が急激に変化するエッジ状の箇所は少ないと考えられるので、加重加算部104でより第1の評価関数最小化部101からの第1の補正画像に対する重みが大きくなるように重み画像生成部603で重み画像を調整してもよい。
このようにすることで、被写体あるいは撮像地点により適した画像処理を実施することができる。
なお、特徴記憶部607は、不揮発性メモリ又は揮発性メモリにより構成することができる。
そして、撮像条件解析部606は、特徴記憶部607に記憶されている特徴情報から、取得された経度及び緯度に対応する特徴を特定する。なお、特徴情報で示されている特徴には、予め閾値εが定められているものとする。このため、撮像条件解析部606は、特定された特徴に対応する閾値εを決定することができる。決定された閾値εは、重み画像生成部603に与えられる。
逆に、特定された特徴が、砂漠又は海上といった自然物が多い地形を示す場合には、閾値εの大きさを予め定められた値より大きくし、第1の評価関数最小化部からの第1の補正画像への重みがより大きな値になるようにすればよい。
例えば、重み画像生成部603は、上記の式(5)により、重み値mを算出し、画素毎に重み値mを示す重み画像を生成する。そして、生成された重み画像は、加重加算部104に与えられる。
図13に示されているフローチャートも、例えば、入力画像が画像処理装置600の図示しない入力インターフェースに入力された場合、画像処理装置600の図示しない入力装置である入力部がユーザから指示を受けた場合等に開始される。
そして、撮像条件解析部606は、特徴記憶部607に記憶されている特徴情報を参照して、取得された経度及び緯度に対応する特徴を特定する(S62)。撮像条件解析部606は、特定された特徴に対応する閾値εを、重み画像生成部603に与える。ここでの特徴は、撮像される対象の特徴である。
例えば、撮像条件解析部606は、特定された特徴に応じて、第1の定数w1及び第2の定数w2の値を調整してもよい。具体的には、特定された特徴が都市部等の人工物が多い場所を示す場合には、エッジ状の箇所を重視して再現するために、第1の定数w1及び第2の定数w2の値を予め定められた値よりも小さい値にすればよい。
逆に、特定された特徴が砂漠又は海上といった自然物が多い地形を示す場合には、輝度が急激に変化するエッジ状の箇所は少なく、逆に平坦な箇所が多いと考えられるため、第1の定数w1及び第2の定数w2の値を予め定められた値よりも大きい値にすればよい。
なお、この場合でも、第1の定数w1及び第2の定数w2の何れか一方のみが変化されてもよい。
例えば、監視カメラ等のカメラで、海岸沿いの地点から周囲の景色を撮像する場合、海側をとるか、陸側をとるかで重み値が調整されてもよい。
具体的には、陸側をとる場合、住宅等の人工物が多く撮れることが予想されるので、そこにはエッジ状の輝度変化が多く見られると予想できる。従って、このような場合には、加重加算部104において、より第2の評価関数最小化部102からの第2の補正画像への重みがより大きくなるように重み画像生成部603で重み画像を調整してもよい。
逆に海側をとる場合、海又は空といった輝度変化があまり見られないものが多く撮れることが予想されるので、その場合は、第1の評価関数最小化部101からの第1の補正画像への重みがより大きくなるように重み画像生成部603で重み画像を調整してもよい。
このため、特徴記憶部607に記憶されている特徴情報が、経度及び緯度並びに撮像方向と、特徴とを対応付けておけばよい。
Claims (10)
- 複数の画素を含む入力画像に対して、前記複数の画素の画素値の変化が小さくなるほど高い評価値となる第1の評価関数を用いて、前記入力画像から、前記入力画像にボケが含まれる前の潜在画像を求めることで、前記入力画像のボケを補正した第1の補正画像を生成する第1の補正処理部と、
前記入力画像に対して、前記複数の画素の画素値の変化が大きくなるほど高い評価値となる第2の評価関数を用いて、前記入力画像から前記潜在画像を求めることで、前記入力画像のボケを補正した第2の補正画像を生成する第2の補正処理部と、
前記複数の画素の各々を対象画素として、前記対象画素を含む予め定められた領域に含まれている画素の画素値のばらつきが大きいほど、前記第2の補正画像に対する重みが大きくなるように、前記対象画素における重み値を特定することで、前記複数の画素の各々に対応する重み値を特定する重み値特定部と、
前記複数の画素の各々に対応する重み値を用いて、前記第1の補正画像及び第2の補正画像の加重加算を行う加重加算部と、を備えること
を特徴とする画像処理装置。 - 前記第1の評価関数は、前記入力画像の1次微分の大きさを表す項に第1の定数を乗じた値を含む評価値を求める関数であり、
前記第2の評価関数は、前記入力画像の2次微分の大きさを表す項に第2の定数を乗じた値を含む評価値を求める関数であること
を特徴とする請求項1に記載の画像処理装置。 - 前記入力画像に含まれているノイズ量を推定し、前記推定されたノイズ量が多いほど、大きくなるように前記第1の定数及び前記第2の定数の少なくとも何れか一方の値を決定する入力画像解析部をさらに備えること
を特徴とする請求項2に記載の画像処理装置。 - 前記重み値特定部は、前記ばらつきが閾値を超えた場合に、前記第2の補正画像に対する重みが大きくなるように、前記対象画素における重み値を特定し、
前記入力画像に含まれているノイズ量を推定し、前記推定されたノイズ量が多いほど、大きくなるように前記閾値を決定する入力画像解析部をさらに備えること
を特徴とする請求項1又は2に記載の画像処理装置。 - 前記入力画像解析部は、前記複数の画素の画素値における代表的な値である代表値が小さいほど、前記ノイズ量が多いと推定すること
を特徴とする請求項3又は4に記載の画像処理装置。 - 前記入力画像は、撮像装置により撮像された画像であり、
前記撮像装置から、前記入力画像を撮像した際の撮像条件を取得し、前記撮像条件から、前記入力画像に含まれているノイズ量を推定し、前記推定されたノイズ量が多いほど、大きくなるように前記第1の定数及び前記第2の定数の少なくとも何れか一方の値を決定する撮像条件解析部をさらに備えること
を特徴とする請求項2に記載の画像処理装置。 - 前記重み値特定部は、前記ばらつきが閾値を超えた場合に、前記第2の補正画像に対する重みが大きくなるように、前記対象画素における重み値を特定し、
前記入力画像は、撮像装置により撮像された画像であり、
前記撮像装置から、前記入力画像を撮像した際の撮像条件を取得し、前記撮像条件から、前記入力画像に含まれているノイズ量を推定し、前記推定されたノイズ量が多いほど、大きくなるように前記閾値を決定する撮像条件解析部をさらに備えること
を特徴とする請求項1又は2に記載の画像処理装置。 - 前記撮像条件解析部は、前記撮像条件に含まれている露光時間が長いほど、前記ノイズ量が少ないと推定すること
を特徴とする請求項6又は7に記載の画像処理装置。 - 前記撮像条件解析部は、前記撮像条件に含まれている撮像される対象に関する情報から、前記ノイズ量を推定すること
を特徴とする請求項6又は7に記載の画像処理装置。 - 複数の画素を含む入力画像に対して、前記複数の画素の画素値の変化が小さくなるほど高い評価値となる第1の評価関数を用いて、前記入力画像から、前記入力画像にボケが含まれる前の潜在画像を求めることで、前記入力画像のボケを補正した第1の補正画像を生成し、
前記入力画像に対して、前記複数の画素の画素値の変化が大きくなるほど高い評価値となる第2の評価関数を用いて、前記入力画像から前記潜在画像を求めることで、前記入力画像のボケを補正した第2の補正画像を生成し、
前記複数の画素の各々を対象画素として、前記対象画素を含む予め定められた領域に含まれている画素の画素値のばらつきが大きいほど、前記第2の補正画像に対する重みが大きくなるように、前記対象画素における重み値を特定することで、前記複数の画素の各々に対応する重み値を特定し、
前記複数の画素の各々に対応する重み値を用いて、前記第1の補正画像及び第2の補正画像の加重加算を行うこと
を特徴とする画像処理方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/023632 WO2020250412A1 (ja) | 2019-06-14 | 2019-06-14 | 画像処理装置及び画像処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020250412A1 true JPWO2020250412A1 (ja) | 2021-10-21 |
| JP7146088B2 JP7146088B2 (ja) | 2022-10-03 |
Family
ID=73781590
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021525533A Active JP7146088B2 (ja) | 2019-06-14 | 2019-06-14 | 画像処理装置及び画像処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7146088B2 (ja) |
| WO (1) | WO2020250412A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014148074A1 (ja) * | 2013-03-18 | 2014-09-25 | 富士フイルム株式会社 | 復元フィルタ生成装置及び方法、画像処理装置及び方法、撮像装置、プログラム、並びに記録媒体 |
| WO2016171087A1 (ja) * | 2015-04-23 | 2016-10-27 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法及び画像処理プログラム |
-
2019
- 2019-06-14 WO PCT/JP2019/023632 patent/WO2020250412A1/ja not_active Ceased
- 2019-06-14 JP JP2021525533A patent/JP7146088B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014148074A1 (ja) * | 2013-03-18 | 2014-09-25 | 富士フイルム株式会社 | 復元フィルタ生成装置及び方法、画像処理装置及び方法、撮像装置、プログラム、並びに記録媒体 |
| WO2016171087A1 (ja) * | 2015-04-23 | 2016-10-27 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法及び画像処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020250412A1 (ja) | 2020-12-17 |
| JP7146088B2 (ja) | 2022-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Galdran | Image dehazing by artificial multiple-exposure image fusion | |
| CN102905058B (zh) | 产生去除了重影模糊的高动态范围图像的设备和方法 | |
| US8358865B2 (en) | Device and method for gradient domain image deconvolution | |
| US10339643B2 (en) | Algorithm and device for image processing | |
| Hee Park et al. | Gyro-based multi-image deconvolution for removing handshake blur | |
| CN108416754B (zh) | 一种自动去除鬼影的多曝光图像融合方法 | |
| Jia et al. | Bayesian correction of image intensity with spatial consideration | |
| JP4454657B2 (ja) | ぶれ補正装置及び方法、並びに撮像装置 | |
| KR102106537B1 (ko) | 하이 다이나믹 레인지 영상 생성 방법 및, 그에 따른 장치, 그에 따른 시스템 | |
| JP2013192224A (ja) | ブラー映像及びノイズ映像で構成されたマルチフレームを用いて非均一モーションブラーを除去する方法及び装置 | |
| JP7767338B2 (ja) | 画像処理方法、画像処理装置、画像処理システム、およびプログラム | |
| JPWO2016189901A1 (ja) | 画像処理装置、画像処理方法、プログラム、これを記録した記録媒体、映像撮影装置、及び映像記録再生装置 | |
| CN106375675B (zh) | 一种航空相机多曝光图像融合方法 | |
| Rabie | Adaptive hybrid mean and median filtering of high-ISO long-exposure sensor noise for digital photography | |
| JP2009177332A (ja) | ぶれ検出装置、ぶれ補正装置及び撮像装置 | |
| JP6541454B2 (ja) | 画像処理装置、撮像装置、画像処理方法、画像処理プログラム、および、記憶媒体 | |
| JP2012003455A (ja) | 画像処理装置、撮像装置および画像処理プログラム | |
| KR101437898B1 (ko) | 단일 영상을 이용한 hdr 영상 생성 장치 및 방법 | |
| CN111886625A (zh) | 图像融合方法、图像采集设备、可移动平台 | |
| Son et al. | Image-pair-based deblurring with spatially varying norms and noisy image updating | |
| CN113034553B (zh) | 图像配准算法的评估方法、终端及存储介质 | |
| JP4859516B2 (ja) | 画像処理装置および画像復元方法 | |
| JP7146088B2 (ja) | 画像処理装置及び画像処理方法 | |
| KR101468433B1 (ko) | 결합된 색상 채널 변환 맵을 이용한 다이나믹 레인지 확장 장치 및 방법 | |
| De Neve et al. | An improved HDR image synthesis algorithm |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210602 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220823 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7146088 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |