JP7699863B2 - ツールの移動距離表示機能を有する医療用手術装置 - Google Patents
ツールの移動距離表示機能を有する医療用手術装置 Download PDFInfo
- Publication number
- JP7699863B2 JP7699863B2 JP2024038525A JP2024038525A JP7699863B2 JP 7699863 B2 JP7699863 B2 JP 7699863B2 JP 2024038525 A JP2024038525 A JP 2024038525A JP 2024038525 A JP2024038525 A JP 2024038525A JP 7699863 B2 JP7699863 B2 JP 7699863B2
- Authority
- JP
- Japan
- Prior art keywords
- tool
- medical
- travel distance
- distance display
- holder body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4609—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof of acetabular cups
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4657—Measuring instruments used for implanting artificial joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
- A61B2034/2057—Details of tracking cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2002/4625—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof with relative movement between parts of the instrument during use
- A61F2002/4627—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof with relative movement between parts of the instrument during use with linear motion along or rotating motion about the instrument axis or the implantation direction, e.g. telescopic, along a guiding rod, screwing inside the instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2002/4632—Special tools for implanting artificial joints using computer-controlled surgery, e.g. robotic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4657—Measuring instruments used for implanting artificial joints
- A61F2002/4658—Measuring instruments used for implanting artificial joints for measuring dimensions, e.g. length
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2002/4681—Special tools for implanting artificial joints by applying mechanical shocks, e.g. by hammering
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2002/4687—Mechanical guides for implantation instruments
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Transplantation (AREA)
- Orthopedic Medicine & Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Physical Education & Sports Medicine (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Surgical Instruments (AREA)
Description
以下に、本願の出願当初の特許請求の範囲に記載された発明を付記する。
[1]
ツールシャフトを備えた医療用ツールと、
前記医療用ツールを挿入するための内部にツール装着孔が形成されたホルダー本体と、
前記ホルダー本体に挿入される前記医療用ツールを支持するツール支持手段と、
前記医療用ツールの移動距離を表示する移動距離表示手段と、を含むことを特徴とするツールの移動距離表示機能を有する医療用手術装置。
[2]
前記移動距離表示手段は、
前記ツールシャフトに形成されて前記ツールシャフトと連動する移動距離感知用変位部、及び
前記移動距離感知用変位部の変位を感知して表示する移動距離表示部、を含むことを特徴とする前記[1]に記載のツールの移動距離表示機能を有する医療用手術装置。
[3]
前記移動距離感知用変位部は、前記医療用ツールの前進方向に直径が徐々に増加する距離感知傾斜面を有する構造で前記ツールシャフトに形成され、
前記移動距離表示部は、前記距離感知傾斜面に測定端が接触して移動するように前記ホルダー本体に設けられ、前記距離感知傾斜面の高低に対応して移動距離を表示する距離表示ゲージを含むことを特徴とする前記[2]に記載のツールの移動距離表示機能を有する医療用手術装置。
[4]
前記距離表示ゲージは、端部に測定子を有するスピンドルが備えられたステムと、前記ステムに結合され、前記測定子の出没度合いに従って回転される指針と前記指針が回転される目盛板が組み込まれた表示ハウジングとを含むアナログ方式のダイヤルゲージ、又は、出没する測定子を備えたステムと、前記ステムに結合され、測定子の出没度合いに従って数字が表示される表示部とを有するデジタル方式のダイヤルゲージで構成されて、
前記ホルダー本体は、前記移動距離感知用変位部と対応する位置に前記ステムが設けられるように前記ツール装着孔と連通する締結ボスが形成されていることを特徴とする前記[3]に記載のツールの移動距離表示機能を有する医療用手術装置。
[5]
前記移動距離表示手段は、前記ホルダー本体に挿入された前記医療用ツールのツールシャフトの露出部位に形成され、複数の目盛りを有する軸目盛り部を含むことを特徴とする前記[1]に記載のツールの移動距離表示機能を有する医療用手術装置。
[6]
前記軸目盛り部は、前記ホルダー本体の後方の前記ツールシャフトの表面に位置するように形成されて、前記医療用ツールの所望の目標移動距離の設定時に、前記ホルダー本体の後方の端部に該当する前記目盛りを一致させる方式で設定できるように構成されたことを特徴とする前記[5]に記載のツールの移動距離表示機能を有する医療用手術装置。
[7]
前記医療用ツールは、前記ツールシャフトの前方に人工寛骨臼カップが結合され、その後方に打撃力を印加する打撃部が備えられ、股関節手術に用いられるインパクターで構成され、
前記ツール支持手段は、前記ツールシャフトを支持しながら動きを案内するツール支持案内部材を含むことを特徴とする前記[1]乃至[6]の中のいずれか一項に記載のツールの移動距離表示機能を有する医療用手術装置。
[8]
前記ホルダー本体に結合されるホルダー支持部材を含み、
前記ツール装着孔は、内周面に前記ツール支持案内部材が載置するように形成された案内部材取付溝部と、前記ホルダー支持部材の設置のためのホルダー結束部材が設けられるように、前記案内部材取付溝部と接して形成された支持部材取付溝部と、前記医療用ツールの設置のために前記ツール装着孔の一側の端部に形成されるツール取付溝部を含むことを特徴とする前記[7]に記載のツールの移動距離表示機能を有する医療用手術装置。
[9]
前記ホルダー本体に加えられる衝撃力を吸収し緩衝するために前記ホルダー本体に設けられた衝撃低減装置、及び
前記衝撃低減装置の設置のために、前記ホルダー本体のツール装着孔の他側の端部に形成された衝撃低減装置挿入部、を含むことを特徴とする前記[8]に記載のツールの移動距離表示機能を有する医療用手術装置。
[10]
前記ツール取付溝部の内部に挿入された前記医療用ツールを拘束するために構成されたツール結束手段を備え、前記ツール結束手段は前記ツール取付溝部の内部と連通するように前記ホルダー本体に穿孔される結束孔と、前記結束孔を介して挿入されるツール結束部材と、前記ツール結束部材が引き込まれて係止するように前記医療用ツールに形成された係止部とを含むことを特徴とする前記[8]に記載のツールの移動距離表示機能を有する医療用手術装置。
11:中空柱体
12:ツール装着工
13:案内部材取付溝部
14:支持部材取付溝部
15:ツール取付溝部
16:ホルダー結束部材
2:ツール支持手段
21:ツール支持案内部材
3:ツール結束手段
31:結束孔
32:ツール結束部材
33:係止部
4:ホルダー支持部材
41:ホルダー支持ロッド
42:連結板
43:アーム接続部材
5:インパクター固定部材
7: 弾性押圧部
71:圧縮コイルスプリング
72:加圧リング
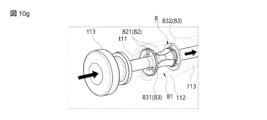
8:衝撃低減装置
81:衝撃低減装置本体
82:衝撃吸収部材
83:離脱防止部材
84:機密部材
9:移動距離表示手段
91:移動距離感知用変位部
92:移動距離表示部
93:軸目盛り部
t:医療用ツール
t1:インパクター
t11:ツールシャフト
Claims (9)
- ツールシャフトを備えた医療用ツールと、
前記医療用ツールを挿入するための内部にツール装着孔が形成されたホルダー本体と、
前記ホルダー本体に挿入される前記医療用ツールを支持するツール支持手段と、
前記医療用ツールの移動距離を表示する移動距離表示手段と、を含み、
前記移動距離表示手段は、前記ホルダー本体に挿入された前記医療用ツールのツールシャフトの露出部位に形成され、複数の目盛りを有する軸目盛り部を含むことを特徴とするツールの移動距離表示機能を有する医療用手術装置。 - 前記移動距離表示手段は、
前記ツールシャフトに形成されて前記ツールシャフトと連動する移動距離感知用変位部、及び
前記移動距離感知用変位部の変位を感知して表示する移動距離表示部、を含むことを特徴とする請求項1に記載のツールの移動距離表示機能を有する医療用手術装置。 - 前記移動距離感知用変位部は、前記医療用ツールの前進方向に直径が徐々に増加する距離感知傾斜面を有する構造で前記ツールシャフトに形成され、
前記移動距離表示部は、前記距離感知傾斜面に測定端が接触して移動するように前記ホルダー本体に設けられ、前記距離感知傾斜面の高低に対応して移動距離を表示する距離表示ゲージを含むことを特徴とする請求項2に記載のツールの移動距離表示機能を有する医療用手術装置。 - 前記距離表示ゲージは、端部に測定子を有するスピンドルが備えられたステムと、前記ステムに結合され、前記測定子の出没度合いに従って回転される指針と前記指針が回転される目盛板が組み込まれた表示ハウジングとを含むアナログ方式のダイヤルゲージ、又は、出没する測定子を備えたステムと、前記ステムに結合され、測定子の出没度合いに従って数字が表示される表示部とを有するデジタル方式のダイヤルゲージで構成されて、
前記ホルダー本体は、前記移動距離感知用変位部と対応する位置に前記ステムが設けられるように前記ツール装着孔と連通する締結ボスが形成されていることを特徴とする請求項3に記載のツールの移動距離表示機能を有する医療用手術装置。 - 前記軸目盛り部は、前記ホルダー本体の後方の前記ツールシャフトの表面に位置するように形成されて、前記医療用ツールの所望の目標移動距離の設定時に、前記ホルダー本体の後方の端部に該当する前記目盛りを一致させる方式で設定できるように構成されたことを特徴とする請求項1に記載のツールの移動距離表示機能を有する医療用手術装置。
- 前記医療用ツールは、前記ツールシャフトの前方に人工寛骨臼カップが結合され、その後方に打撃力を印加する打撃部が備えられ、股関節手術に用いられるインパクターで構成され、
前記ツール支持手段は、前記ツールシャフトを支持しながら動きを案内するツール支持案内部材を含むことを特徴とする請求項1乃至5の中のいずれか一項に記載のツールの移動距離表示機能を有する医療用手術装置。 - 前記ホルダー本体に結合されるホルダー支持部材を含み、
前記ツール装着孔は、内周面に前記ツール支持案内部材が載置するように形成された案内部材取付溝部と、前記ホルダー支持部材の設置のためのホルダー結束部材が設けられるように、前記案内部材取付溝部と接して形成された支持部材取付溝部と、前記医療用ツールの設置のために前記ツール装着孔の一側の端部に形成されるツール取付溝部を含むことを特徴とする請求項6に記載のツールの移動距離表示機能を有する医療用手術装置。 - 前記ホルダー本体に加えられる衝撃力を吸収し緩衝するために前記ホルダー本体に設けられた衝撃低減装置、及び
前記衝撃低減装置の設置のために、前記ホルダー本体のツール装着孔の他側の端部に形成された衝撃低減装置挿入部、を含むことを特徴とする請求項7に記載のツールの移動距離表示機能を有する医療用手術装置。 - 前記ツール取付溝部の内部に挿入された前記医療用ツールを拘束するために構成されたツール結束手段を備え、前記ツール結束手段は前記ツール取付溝部の内部と連通するように前記ホルダー本体に穿孔される結束孔と、前記結束孔を介して挿入されるツール結束部材と、前記ツール結束部材が引き込まれて係止するように前記医療用ツールに形成された係止部とを含むことを特徴とする請求項7に記載のツールの移動距離表示機能を有する医療用手術装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020230038819A KR102596552B1 (ko) | 2023-03-24 | 2023-03-24 | 툴의 이동거리 표시기능을 갖는 의료용 수술장치 |
| KR10-2023-0038819 | 2023-03-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024137798A JP2024137798A (ja) | 2024-10-07 |
| JP7699863B2 true JP7699863B2 (ja) | 2025-06-30 |
Family
ID=88747535
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024038525A Active JP7699863B2 (ja) | 2023-03-24 | 2024-03-13 | ツールの移動距離表示機能を有する医療用手術装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12150816B2 (ja) |
| EP (1) | EP4434498A1 (ja) |
| JP (1) | JP7699863B2 (ja) |
| KR (1) | KR102596552B1 (ja) |
| CN (1) | CN118680676A (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000035308A (ja) | 1998-07-17 | 2000-02-02 | Masato Ishii | 測定方法及びその装置 |
| US20100016860A1 (en) | 2006-12-22 | 2010-01-21 | Mccardel Brian | Depth gauge cup impactor |
| US20110082462A1 (en) | 2009-10-01 | 2011-04-07 | Mako Surgical Corp. | Tool, kit-of-parts for multi-functional tool, and robotic system for same |
| JP2015524733A (ja) | 2012-08-14 | 2015-08-27 | オースアライン・インコーポレイテッド | 股関節置換ナビゲーションシステム及び方法 |
| CN115590594A (zh) | 2022-10-19 | 2023-01-13 | 北京长木谷医疗科技有限公司(Cn) | 手术器械、手术机器人及髋臼杯假体置入深度的测量方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5814103U (ja) * | 1981-07-20 | 1983-01-28 | 三菱重工業株式会社 | ダイヤルゲ−ジ用アタツチメント |
| EP2358310B1 (en) * | 2008-09-10 | 2019-07-31 | OrthAlign, Inc. | Hip surgery systems |
| EP2476397B1 (en) * | 2011-01-17 | 2015-10-21 | Greatbatch Medical SA | Straight cup impactor with lever arm |
| KR101371585B1 (ko) * | 2012-05-10 | 2014-03-10 | 심성은 | 의료용 카데터 구조물 |
| WO2014063226A1 (en) * | 2012-10-22 | 2014-05-01 | Uti Limited Partnership | Apparatus and method for positioning of acetabular components during hip arthroplasty procedures |
| CN105592802B (zh) * | 2013-08-06 | 2019-01-29 | 微创骨科控股有限公司 | 骨钩工具 |
| EP3967769A3 (en) | 2014-06-18 | 2022-06-15 | Toray Industries, Inc. | Lung cancer detection kit or device, and detection method |
| US10363149B2 (en) * | 2015-02-20 | 2019-07-30 | OrthAlign, Inc. | Hip replacement navigation system and method |
| DE102015109371A1 (de) * | 2015-06-12 | 2016-12-15 | avateramedical GmBH | Vorrichtung und Verfahren zur robotergestützten Chirurgie |
| JP6862429B2 (ja) * | 2015-09-03 | 2021-04-21 | ストライカー・コーポレイション | ドリルビット上を摺動するプローブを含む一体形深さゲージを有する、動力外科用ドリル |
| US11266513B2 (en) * | 2018-12-21 | 2022-03-08 | Stryker European Operations Limited | Device for measuring intervertebral space |
| KR102415277B1 (ko) * | 2022-03-22 | 2022-06-29 | 박진만 | 진동에 강인한 치과기공용 핸드피스 |
-
2023
- 2023-03-24 KR KR1020230038819A patent/KR102596552B1/ko active Active
-
2024
- 2024-03-13 JP JP2024038525A patent/JP7699863B2/ja active Active
- 2024-03-13 EP EP24163351.0A patent/EP4434498A1/en active Pending
- 2024-03-19 US US18/609,380 patent/US12150816B2/en active Active
- 2024-03-21 CN CN202410329465.5A patent/CN118680676A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000035308A (ja) | 1998-07-17 | 2000-02-02 | Masato Ishii | 測定方法及びその装置 |
| US20100016860A1 (en) | 2006-12-22 | 2010-01-21 | Mccardel Brian | Depth gauge cup impactor |
| US20110082462A1 (en) | 2009-10-01 | 2011-04-07 | Mako Surgical Corp. | Tool, kit-of-parts for multi-functional tool, and robotic system for same |
| JP2015524733A (ja) | 2012-08-14 | 2015-08-27 | オースアライン・インコーポレイテッド | 股関節置換ナビゲーションシステム及び方法 |
| CN115590594A (zh) | 2022-10-19 | 2023-01-13 | 北京长木谷医疗科技有限公司(Cn) | 手术器械、手术机器人及髋臼杯假体置入深度的测量方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240315796A1 (en) | 2024-09-26 |
| EP4434498A1 (en) | 2024-09-25 |
| CN118680676A (zh) | 2024-09-24 |
| KR102596552B1 (ko) | 2023-11-02 |
| JP2024137798A (ja) | 2024-10-07 |
| US12150816B2 (en) | 2024-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2502580B1 (en) | Pneumatic surgical instrument | |
| EP2517654B1 (en) | Surgical sagittal saw blade with blade bar, a blade head drive links and fingers that connect the drive links to the blade head | |
| EP3079599B1 (en) | Semi-rigid bone attachment system | |
| US9320529B2 (en) | Surgical instrument for impacting and extracting a cutting instrument | |
| CN103492833A (zh) | 具有集成的导航与制导系统的工具以及相关设备和方法 | |
| EP2081506A2 (en) | System and method for locating of distal holes of an intramedullary nail | |
| US20130281884A1 (en) | Measurement and resulting compensation of intramedullary nail deformation | |
| JP7699863B2 (ja) | ツールの移動距離表示機能を有する医療用手術装置 | |
| JP3165299U (ja) | ボール抜去器 | |
| EP4599787A1 (en) | Impact-reducing device for medical tools and medical holder having same | |
| CN210843347U (zh) | 一种可调角度的导针穿刺器具 | |
| JP2025532366A (ja) | 医療用ツールホルダ | |
| JP7501893B2 (ja) | 骨固定システム | |
| JP4283731B2 (ja) | 骨手術用案内装置 | |
| CN115153796B (zh) | 拉力螺钉套筒组件和瞄准模块 | |
| KR102892541B1 (ko) | 수술로봇용 수술도구 고정장치 | |
| EP2049031B1 (en) | Medical device | |
| US20250331927A1 (en) | System for surgical instrument verification | |
| WO2020183129A1 (en) | Impactor device | |
| CN120152679A (zh) | 用于手术机器人的手术工具固定装置 | |
| AU2019203873A1 (en) | Surgical sagittal saw with indexing head and toolless blade coupling assembly for actuating an oscillating tip saw blade and oscillating tip saw blade with self cleaning head |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20250117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250513 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250611 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7699863 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |