以下、適宜図面を参照しながら、実施形態を詳細に説明する。但し、必要以上に詳細な説明は省略する場合がある。例えば、既によく知られた事項の詳細説明や実質的に同一の構成に対する説明を省略する場合がある。これは、以下の説明が不必要に冗長になることを避け、当業者の理解を容易にするためである。尚、添付図面及び以下の説明は、当業者が本開示を十分に理解するために提供されるものであり、これらにより特許請求の範囲に記載の主題を限定することは意図されていない。
(実施形態の内容に至る経緯)
従来の界面検出センサは、光パルスを投光する光源に対する光パルスが照射されるサンプル管の位置を、サンプル管の長手方向に沿って一定速度で変更しながら、2種類の光パルスを交互に点灯することを繰り返している。フォトダイオードのPN接合部の蓄積電荷による立下り波形(尾引き波形)が重ならず、時系列で隣り合う次信号への影響が少なくなるように、2種類の光パルスの点灯の繰り返し周期(投光周期)は、長めに設定されている。
ここで、界面検出に要する時間を短縮するためには、上記の光源に対するサンプル管の位置の更新速度(スキャン速度)を高速化する必要がある。これに対し、投光周期を変更せずに、スキャン速度を高速化すると(例えばスキャン速度を2倍にすると)、サンプル管に光パルスが照射される照射位置(垂直照射位置とも称する)の間隔が広がる。この場合、サンプル管の長手方向に沿って垂直照射位置を細かく設定できないので、界面検出精度が低下する。
これに対し、サンプル管の長手方向に沿って垂直照射位置を細かく設定するために、投光周期を短くすると(例えば投光周期を1/2にすると)、時系列で隣合う前信号の立下り波形が次信号に重なり、次信号の受光波形に対して影響を生じる。そのため、やはり界面検出精度が低下する。
以下の実施形態では、検出対象を走査するスキャン速度を高速化しつつ、検出対象内の界面検出精度の低下を抑制できる界面検出センサ及び界面検出方法について説明する。
(実施形態)
<血液界面検出システムの構成>
図1は、実施形態における血液界面検出システム5の構成例を示す図である。血液界面検出システム5は、採血管50と、移動機構60と、界面検出センサ100と、を含む構成である。
なお、本実施形態では、x方向、y方向及びz方向を規定している。z方向は、採血管50の延在方向であり、例えば鉛直方向である。y方向は、z方向に垂直な方向であり、後述する投光部110から投光される投光光の進行方向である。x方向は、y方向及びz方向に垂直な方向である。z方向の正側を上とも記載し、z方向の負側を下とも記載する。
採血管50は、血液サンプルCを収容する(図3等参照)。血液サンプルCは、界面の検出対象の一例である。血液サンプルCは、複数の層を有し、例えば、血餅C1の層及び血清C3の層を有する(図3等参照)。血液サンプルCは、分離材C2の層を有してもよい(図3等参照)。分離材C2は、例えば有機性分離ゲルである。例えば、採血管50内に分離材C2が注入され、遠心分離機により遠心分離されることで、血液サンプルCが血餅C1と分離材C2と血清C3とに分離される。血餅C1は、バフィーコートC12の層及び赤血球C11の層を有する。バフィーコートC12は、例えば白血球及び血小板を有する。
移動機構60は、採血管50を保持する保持アーム61と、保持アーム61に駆動力を供給する駆動部材(例えばモータ)と、を有する。移動機構60は、採血管50を、採血管50の長手方向(z方向)に沿って移動させる。採血管50の長手方向は、鉛直方向に平行である。なお、採血管50の移動方向(z方向)は、界面検出のためのスキャン方向である。
界面検出センサ100は、投光部110と、受光部120と、制御部130と、を含む構成である。界面検出センサ100の筐体は、任意の形状を有し、例えば図1に示すようにコの字形状を有する。コの字形状では、投光部110と受光部120との間に空間が存在し、投光部110と受光部120とが距離d1離れて配置される。投光部110と受光部120との間の空間には、採血管50がz方向に移動自在に配置される。距離d1は、投光部110の投光口から受光部120の受光口までの距離であり、投受光間距離とも称する。なお、採血管50の位置が固定され、界面検出センサ100が移動機構60によってz方向に移動自在に配置されてもよい。この場合でも、界面検出センサ100と採血管50とのz方向に沿う相対的な位置関係を変更可能である。
界面検出センサ100が上記のコの字形状を有する場合、投光部110と受光部120とが一体に固定の形状となるので、投光部110の投光と受光部120の受光との光軸合わせが容易になる。なお、界面検出センサ100が、コの字形状に形成されなくてもよい。
投光部110は、波長λ(λ1、λ2、…)の異なる複数の投光光S11,S12,…を含む投光光セットS10を、採血管50に向かって順次投光(照射)する。投光光は、例えば、レーザ光であり、パルス状の光であってよい。受光部120は、波長λの異なる複数の受光光S21,S22,…を含む受光光セットS20を順次受光する。受光光は、例えば、レーザ光であり、パルス状の光であってよい。受光光は、投光部110により投光された投光光が採血管50を透過した信号である。制御部130は、受光部120により受光された受光光セットS20に基づいて、採血管50内の血液サンプルCの各層の境界(界面)を非接触で検出する。
具体的には、採血管50内の血液サンプルCに分離材C2が存在する場合、制御部130は、血餅C1の層と分離材C2の層との界面、分離材C2の層と血清C3の層との界面、及び血清C3の層と空気層との界面の少なくとも1つを検出する。また、採血管50内の血液サンプルCに分離材C2が存在しない場合、制御部130は、血餅C1の層と血清C3の層との界面、及び、血清C3の層と空気層との界面の少なくとも1つを検出する。
図2Aは、界面検出センサ100の構成例を示すブロック図である。界面検出センサ100は、上述のように、投光部110と、受光部120と、制御部130と、を備える。
投光部110は、1つ以上(例えば2つ)のドライバ111と、1つ以上(例えば2つ)の投光素子112と、1つ以上(例えば2つ)のレンズ113と、合波器114と、を備える。なお、ドライバ111、投光素子112,及びレンズ113は、投光部110により投光され波長の異なる投光光の数に対応して、複数系統設けられる。
各ドライバ111は、制御部130から制御情報を取得し、制御情報に基づいて、各ドライバ111に接続された各投光素子112を駆動し、投光信号を供給する。例えば、ドライバ111Aは、投光素子112Aを駆動し、投光信号を供給する。ドライバ111Bは、投光素子112Bを駆動し、投光信号を供給する。
各投光素子112は、ドライバ111からの投光信号を電気信号から光信号に変換し、異なる波長λ(λ1,λ2,…)を有する各投光光を投光する。例えば、投光素子112Aは、波長λ1(例えば1550nm又は1300nm)の投光光S11を投光する。投光素子112Aは、波長λ2(例えば980nm)の投光光S12を投光する。
投光光S11の波長λ1と投光光S12の波長λ2は、制御部130によって、検出対象に応じて決定されてもよい。波長λ1と波長λ2とは、投光光S11と投光光S12とが検出対象の各層間で変化するように決定される。各層間とは、血餅C1の層と分離材62の層との間、分離材62の層と血清C3の層との間、血清C3の層と空気の層との間、又は分離材C2が不在である場合の血餅C1の層と血清C3の層との間の少なくとも1つを含んでよい。
投光光S11は、赤外線領域の波長を有する光である。また、投光光S12は、投光光S11の波長よりも短波長側の波長領域の波長の光である。投光光S11,S12は、近赤外線領域の波長の光であることが好ましい。波長λ1は、例えば1300nm以上2000nm以下のいずれかの波長である。波長λ2は、例えば800nm以上1100nm以下のいずれかの波長である。波長λ1は例えば1550nmである。波長λ2は例えば980nmである。
各レンズ113は、各投光素子112から投光された各投光光を合波器114に進行させる。例えば、レンズ113Aは、投光光S11を合波器114に進行させ、レンズ113Bは、投光光S12を合波器114に進行させる。
合波器114は、各レンズ113を介して取得された各投光光(例えば投光光S11,S12)を、同一光路上に合流させる。この同一光路は、合波器114から採血管50を透過して受光部120に向かう光路である。合波器114は、例えば反射ミラーとダイクロイックミラーとを備えてよい。合流された投光光S11,S12は、投光光セットS10を形成し、投光口から投光部110の外部に出射され、採血管50を透過して受光部120に向かう。
受光部120は、レンズ121と、受光素子122と、増幅器123と、を備える。なお、受光部120は、レンズ121を備えなくてもよい。
レンズ121は、各投光光S11,S12が透過した各受光光S21,S22を含む受光光セットS20を、受光口を介して取得する。レンズ121は、各受光光S21,S22を受光素子122に集光する。受光素子122は、受光光としての光信号を電気信号に変換し、受光光の受光量に応じた信号レベルの受光信号を増幅器123に出力する。増幅器123は、受光素子21から出力される各受光信号を増幅して制御部130に出力する。
制御部130は、増幅器131、AD変換器132、CPU133、出力部144、及び出力部145を備える。なお、制御部130は、増幅器131を備えなくてもよい。
増幅器131は、受光部120から取得した各受光信号を増幅する。AD変換器132は、これらの受光信号のアナログ値をデジタル値に変換し、CPU133に送る。このデジタル値は、受光部120が受光する受光光セットS20に含まれる受光光S21,S22の受光量を示す。
CPU133は、プロセッサの一例であり、投光部110及び受光部120を制御する。CPU133は、例えば、投光部110による投光タイミングと受光部120による受光タイミングを同期させる。CPU133は、AD変換器132から取得された受光光S21,S22の受光量(受信信号の信号レベル)に基づいて、検査対象(例えば採血管50内の血液サンプルC)の各層の界面を検出する。
例えば、CPU133は、受光光S21の受光量の時間変化を示すデータと受光光S22の受光量の時間変化を示すデータとを収集し、収集されたデータに基づいて、血液サンプルCの各層の界面を検出してよい。例えば、CPU133は、受光光S21の受光量と受光光S22の受光量との差に基づいて、血液サンプルCの各層の界面を検出してよい。例えば、CPU133は、制御部130が備えるメモリ(不図示)に記憶された閾値と受光量とを比較し、この比較の結果により界面を検出してよい。閾値は、検出対象に応じて設定される。例えば、検出対象としての血液サンプルCにおいて、血餅C1と分離材C2との界面、分離材C2の層と血清C3の層との界面、血清C3の層と空気の層との界面を検出する場合、それぞれの界面を検出する閾値がそれぞれ設定されていてよい。CPU133は、出力部134を介して、検出された界面の情報を含む検出信号を外部に出力する。
CPU133は、光の各波長と透過率との関係を示す特性情報、つまり各波長の透過スペクトルの情報を予めメモリに保持しておいてよい。図2Bは、血液サンプルCに対する各投光光の透過特性(特性情報の一例)を示すグラフである。この透過特性は、各投光光の波長と透過率との関係を示している。この透過率は、任意の受光素子により投光光を受光光として直接受光したときの受光量と、厚さ16mmの検体を透過した受光光を同じ受光素子により受光したときの受光量と、の割合を示す。実線の特性線A1は、血清C3の透過率を示す。破線の特性線A2は、分離材C2の透過率を示す。破線の特性線A3は、血餅C1の透過率を示す。CPU133は、特性情報を基に、投光部110により投光される投光光S11の波長λ1及び投光光S12の波長λ2を決定してよい。CPU133は、投光光S11の波長λ1及び投光光S12の波長λ2の情報を制御情報に含めて、出力部135を介して投光部110に送ってよい。
CPU133は、受光光セットS20の受光量が時系列で上り階段状に大きくなるように、投光部110による投光を制御する。例えば、CPU133は、メモリに保持された特性情報に基づいて、各投光光の投光に関する投光情報を決定してよい。投光光の投光情報は、例えば、各投光光の投光量(投光信号の信号レベル)、各投光光の波長、及び各投光光の投光順序の少なくとも一方を含んでよい。この場合、CPU133は、特性情報として、波長毎の光が投光された場合の検出対象の各層の透過率の情報を取得し、この透過率に基づいて、各波長の投光光が検出対象の各層を透過した場合の減衰量を算出してよい。そして、CPU133は、投光光の投光量から減衰量が減算された受光光の受光量が、時系列で上り階段状になるように、投光光の投光量を決定してよい。また、CPU133は、予め投光光の投光量が決まっている場合には、所望の受光量が得られる減衰量を算出し、減衰量に対応する透過率を算出し、その透過率となるような波長を、特性情報から導出してもよい。CPU133は、決定された投光情報を制御情報に含めて、出力部135を介して投光部110に送ってよい。
CPU133は、受光光セットS20の受光量が時系列で下り階段状に小さくなっている場合、投光光セットS10に含まれる複数の投光光の投光順序を入れ替える。CPU133は、入れ替えられた投光順序の情報を制御情報に含めて、出力部135を介して投光部110に送ってよい。
図3は、投光光セットS10の投光タイミングと、受光光セットS20の受光タイミングと、採血管50に対する垂直照射位置と、の第1例を示す図である。垂直照射位置は、採血管50の移動方向に沿う位置(z方向位置)であって、投光部110からy方向に沿って投光された投光光が透過する位置である。図3では、受光光セットS20として、受光光S21の受光タイミングと受光光S22の受光タイミングとが時系列で重複せず隣接するように、投光光セットS10を投光することを例示する。
つまり、投光部110は、制御部130による制御に従って、投光光セットS10の投光時に、まず投光光S11の投光を開始する。そして、投光部110は、投光光S11の投光の終了時に投光光S12の投光を開始し、その後投光光S12の投光を終了する。この場合、制御部130は、投光タイミングと受光タイミングとを同期させるので、受光部120は、投光光S11の投光タイミングと投光光S12の投光タイミングとに同期して、受光光S21と受光光S22とを含む受光光セットS20を受光する。この結果、受光部120は、受光光セットS20の受光時に、まず受光光S21の受光を開始し、受光光S21の受光の終了時に受光光S22の受光を開始し、その後受光光S22の受光を終了する。
図3では、投光光セットS10の投光期間T1は、投光光S11が投光される第1投光期間T11と、投光光S12が投光される第2投光期間T12と、を含む。投光期間T1において、第1投光期間T11が時系列で前半の期間であり、第2投光期間T12が時系列で後半の期間である。第1投光期間T11と第2投光期間T12とは隣接しており、時系列で連続している。投光部110は、1つの投光光セットS10を投光した後、所定の時間間隔TI1を空けて、次の投光光セットS10を投光する。このような投光光セットS10の投光を繰り返す。よって、投光期間T1と所定の時間間隔TI1とを合わせた期間が投光周期TPとなり、投光周期TPで投光光セットS10の投光が繰り返される。投光周期TPの1周期で、投光光S11と投光光S12との双方が、1回投光される。
また、受光光セットS20の受光期間T2は、受光光S21が受光される第1受光期間T21と、受光光S22が受光される第2受光期間T22と、を含む。受光期間T2において、第1受光期間T21が時系列で前半の期間であり、第2受光期間T22が時系列で後半の期間である。第1受光期間T21と第2受光期間T22とは隣接しており、時系列で連続している。受光部120は、1つの受光光セットS20を受光した後、所定の時間間隔TI2を空けて、次の受光光セットS20を受光する。このような受光光セットS20の受光を繰り返す。よって、受光期間T2と所定の時間間隔TI2とを合わせた期間が受光周期TRとなり、受光周期TRで受光光セットS20の受光が繰り返される。受光周期TRの1周期で、受光光S21と受光光S21との双方が、1回受光される。
また、移動機構60は、界面検出センサ100による血液サンプルCに含まれる各層の界面を検出する界面検出動作時(投光動作時及び受光動作時)に、採血管50をz方向に移動可能である。つまり、採血管50が移動機構60による移動制御に従ってz方向に移動しながら、投光部110による投光光セットS10の投光及び受光部120による受光光セットS20の受光を行う。
例えば、図3では、採血管50は、界面検出動作時には、z方向の負側から正側に向かって(上方向)に移動中である。採血管50は、z方向に一定速度で移動してよい。採血管50の移動速度が一定速度である場合、一定の投光周期TPで投光光セットS10を投光することで、一定の受光周期TRで受光光セットS20を受光する。
この場合、例えば、投光部110は、第1の投光光セットS10の投光時には、第1投光期間T11に採血管50の第1空間領域R1に投光光S11を照射し、受光部120は、第1受光期間T21に第1空間領域R1を透過した受光光S21を受光する。第1空間領域R1は、採血管50内の最下層に位置する血餅C1の層の下端付近に位置する。続いて、投光部110は、第2投光期間T12に採血管50の第2空間領域R2に投光光S12を照射し、受光部120は、第2受光期間T22に第2空間領域R2を透過した受光光S22を受光する。第2空間領域R2は、採血管50内の血餅C1の層の位置に含まれ、第1空間領域R1の上方に第1空間領域R1に空間的に連続して位置する。制御部130は、第1空間領域R1及び第2空間領域R2を合わせた領域内に、血液サンプルCの界面が存在するか否かを判別する。なお、各空間領域は、血液サンプルCを検査するためのスキャン領域(走査領域)の一例である。また、各空間領域は、採血管50に投光光が照射される垂直照射位置が連続する領域であるとも言える。
そして、投光中の第1の投光光セットS10の投光光S12の投光から次の第2の投光光セットS10の投光光S11の投光までの期間は、投光光が投光されない時間間隔TI1が存在する。そのため、受光中の受光光セットS20の受光光S22の受光から次の受光光セットS20の受光光S21の投光までの期間は、受光光が受光されない時間間隔TI2が存在する。この時間間隔TI1,TI2は、第2受光期間T22における受光光S22の立下り期間S22aが加味されて定められてよい。立下り期間S22aは、受光光S22の受光終了直後から、受光光S22の受光量が所定量以下となるまでの期間である。所定量は、値0であってもよいし、値0でなくても、次に受光される受光光セットS20の第1受光期間T21の受光光に対して重畳される残存信号が微小であり、次に受光される受光光セットS20の受光に基づく界面検出への影響を無視できる程度であればよい。例えば、第1の受光光セットS20の受光終了時点から、第1の受光光セットS20に後続する第2の受光光セットS20の受光開始時点までの期間は、立下り期間S22aよりも長い、又は立下り期間S22aと同じ長さであってよい。
投光部110は、一定の投光周期TPで、投光光セットS10を繰り返し投光する。よって、一定の投光周期TPで、投光光S11,S12の投光も繰り返される。したがって、受光部120は、一定の受光周期TRで、受光光セットS20を繰り返し受光する。よって、一定の受光周期TRで、受光光S21,S22の受光も繰り返される。
例えば、投光部110は、第1の投光光セットS10の次に、第1の投光光セットS10に後続する第2の投光光セットS10を投光する。図3では、第2の投光光セットS10の投光光S11が投光される第1空間領域R1は、採血管50内のz方向の中間付近に位置する分離材C2の層の付近に位置する。受光部120は、この第1空間領域R1を透過した受光光S21を受光する。また、第2の投光光セットS10の投光光S12が投光される第2空間領域R2は、第1空間領域R1の上方に第1空間領域R1に空間的に連続して位置し、分離材C2の層の上方に位置する血清C3の層の下端付近に位置する。受光部120は、この第2空間領域R2を透過した受光光S22を受光する。
同様に、投光部110は、第2の投光光セットS10の次に、第2の投光光セットS10に後続する第3の投光光セットS10を投光する。図3では、第3の投光光セットS10の投光光S11が投光される第1空間領域R1は、採血管50内のz方向の上方に位置する空気の層に位置する。受光部120は、この第1空間領域R1を透過した受光光S21を受光する。また、第3の投光光セットS10の投光光S12が投光される第2空間領域R2は、第1空間領域R1の上方に第1空間領域R1に空間的に連続して位置し、空気の層に位置する。受光部120は、この第2空間領域R2を透過した受光光S22を受光する。
移動機構60による採血管50のz方向への移動速度が高速である程、繰り返し投光される垂直照射位置の空間的な間隔が広がる。つまり移動機構60による採血管50のz方向への移動速度が高速である程、検出対象についての検出結果をなるべく多く得るためには、隣り合う投光光セットS10の投光光S11が投光される垂直照射位置のz方向に沿う距離d2が、短い方が好ましい。一方、距離d2を短くするためには、投光周期TPを短くすることが必要とされる。この場合、投光光S11と投光光S12とが時間的間隔をあけて投光されていると、受光光S21と受光光S22とが混在し易くなる。
これに対し、界面検出センサ100は、投光光S11,S12を時系列で連続して送ることで、受光光S21,S22を時系列で連続して受光でき、投光周期TP及び受光周期TRを短縮し易くできる。よって、界面検出センサ100は、なるべく短期間でなるべく多くの投光光S11,S12を投光でき、なるべく短期間でなるべく多くの受光光S21,S22を受光できる。よって、距離d2をなるべく短くできる。
また、制御部130は、受光光セットS20に含まれる時系列での受光量が上り階段状に大きくなるように、投光部110に投光させる。つまり、各受光期間T2において、第1受光期間T21に受光される受光光の受光量よりも第2受光期間T22に受光される受光光の受光量の方が大きくなるように、投光部110により投光される投光光S11,S12の特性(例えば投光量又は波長)や投光光S11,S12の投光順序を調整する。つまり、受光側において、受光光S21,S22の受光量(光エネルギー)が、時系列で上り階段状に大きくなるように調整される。
同一の受光光セットS20内において、時系列で先に受光される受光光S21の立下り成分が時系列で後に受光される受光光S22に重畳し得る。この場合でも、受光光セットS20の時系列での受光量が上り階段状であることで、受光光S21の立下り成分が受光光S22の受光量に対して十分に小さい。したがって、界面検出センサ100は、第1受光期間T21に受光される受光光S21が第2受光期間T22に受光される受光光S22に干渉し、受光光S21,S22の双方を含む同じ受光光セットS20に基づく界面検出の精度の低下を抑制できる。
また、異なる受光光セットS20内において、先に受光される受光光セットS20の受光光S22が、後に受光される受光光セットS20の受光光S21に混在しやすくなる。これに対し、立下りを加味した時間間隔TI2が確保されることで、界面検出センサ100は、時系列で前の受光光セット20の受光光S22によって、後の受光光セットS20の受光光S21に干渉し、後の受光光セットS20に基づく界面検出の精度の劣化を抑制できる。
図3に示した第1動作例によれば、界面検出センサ100は、時系列で2つの隣接する投光光S11,S12が採血管50を透過後に、時系列で2つの隣接する受光光S21,S22を取得できる。そして、界面検出センサ100は、受光光S21,S22の受光量が時系列で上り階段状に大きくなるように調整できる。よって、界面検出センサ100は受光光セットS20の立下り鈍りによる界面検出精度の低下を抑制できる。また、界面検出センサ100は、光パルス照射の繰り返し周期を最大化できるので、z方向に沿って多数の垂直照射位置に対応する受光光セットS20を得ることができ、z方向の界面検出の分解能を向上できる。
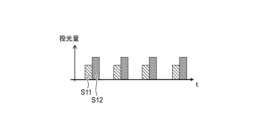
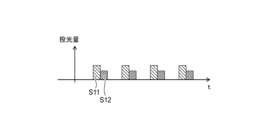
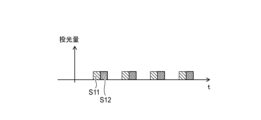
図4A~図4Cは、図3に示した第1例の投光光セットS10に含まれる各投光光S11,S12の投光タイミングと投光量との一例を示す図である。
図4Aでは、各投光光セットS10に含まれる投光光S11,S12の時系列での投光量が、上り階段状に大きくなっている。つまり、同じ投光光セットS10内の投光光S11よりも投光光S12の投光量が大きい。この場合、この投光光セットS10が採血管50内の血液サンプルCを透過した受光光セットS20の時系列での受光量も、上り階段状に大きくなり易い。例えば、前述のような投光光S11,S12の波長λ1,λ2を加味した血液サンプルCに対する透過特性において、投光光S11,S12の透過率がほぼ等しい場合には、受光側でも受光光セットS20の時系列での受光量が上り階段状に大きくなる。
図4Bでは、各投光光セットS10に含まれる投光光S11,S12の時系列での投光量が、下り階段状に小さくなっている。つまり、同じ投光光セットS10内の投光光S11よりも投光光S12の投光量が小さい。この場合でも、前述のような投光光S11,S12の波長λ1,λ2を加味した血液サンプルCに対する透過特性に応じて、受光部120に受光される受光光セットS20の時系列での受光量が、上り階段状に大きくなればよい。
図4Cでは、各投光光セットS10に含まれる投光光S11,S12の時系列での投光量が示す形状が、矩形状になっている。つまり、同じ投光光セットS10内の投光光S11と投光光S12との投光量が等しい。この場合でも、前述のような投光光S11,S12の波長λ1,λ2を加味した血液サンプルCに対する透過特性に応じて、受光部120に受光される受光光セットS20の時系列での受光量が、上り階段状に大きくなればよい。
図5は、投光光セットS10の投光タイミングと、受光光セットS20の受光タイミングと、採血管50に対する垂直照射位置と、の第2例を示す図である。図5では、受光光セットS20として、受光光S21の受光タイミングと受光光S22の受光タイミングとが時系列で重複するように、投光光セットS10を投光することを例示する。
つまり、投光部110は、制御部130による制御に従って、投光光セットS10の投光時に、まず投光光S11の投光を開始する。そして、投光部110は、投光光S11の投光中、つまり投光光S11の投光が終了する前に、投光光S12の投光を開始し、その後投光光S12の投光を終了する。この場合、制御部130は、投光タイミングと受光タイミングとを同期させるので、受光部120は、投光光S11の投光タイミングと投光光S12の投光タイミングとに同期して、受光光S21と受光光S22とを含む受光光セットS20を受光する。この結果、受光部120は、受光光セットS20の受光時に、まず受光光S21の受光を開始し、受光光S21の受光中つまり受光光S21の受光が終了する前に受光光S22の受光を開始し、その後受光光S22の投光を終了する。
つまり、図3に示した第1例と比較すると、図5に示す第2例では、時系列で先に投光される投光光S11の投光継続時間が長く、投光光S11の投光期間と投光光S12の投光期間とが少なくとも一部重複している。よって、図3に示した第1例と比較すると、図5に示す第2例では、時系列で先に受光される受光光S21の受光継続時間が長く、受光光S21の受光期間と受光光S22の受光期間とが少なくとも一部重複している。
図5では、投光光セットS10の投光期間T1は、投光光S11が投光される第1投光期間T11と、投光光S11及び投光光S12が投光される第2投光期間T12と、を含む。投光期間T1において、第1投光期間T11が時系列で前半の期間であり、第2投光期間T12が時系列で後半の期間である。第1投光期間T11と第2投光期間T12とは隣接しており、時系列で連続している。投光部110は、1つの投光光セットS10を投光した後、所定の時間間隔TI1を空けて、次の投光光セットS10を投光する。このような投光光セットS10の投光を繰り返す。よって、投光期間T1と所定の時間間隔TI1とを合わせた期間が投光周期TPとなり、投光周期TPで投光光セットS10の投光が繰り返される。投光周期TPの1周期で、投光光S11と投光光S12との双方が、1回投光される。
また、受光光セットS20の受光期間T2は、受光光S21が受光される第1受光期間T21と、受光光S21及び受光光S22が受光される第2受光期間T22と、を含む。受光期間T2において、第1受光期間T21が時系列で前半の期間であり、第2受光期間T22が時系列で後半の期間である。第1受光期間T21と第2受光期間T22とは隣接しており、時系列で連続している。受光部120は、1つの受光光セットS20を受光した後、所定の時間間隔TI2を空けて、次の受光光セットS20を受光する。このような受光光セットS20の受光を繰り返す。よって、受光期間T2と所定の時間間隔TI2とを合わせた期間が受光周期TRとなり、受光周期TRで受光光セットS20の受光が繰り返される。受光周期TRの1周期で、受光光S21と受光光S21との双方が、1回受光される。
また、移動機構60は、界面検出センサ100による血液サンプルCに含まれる各層の界面を検出する界面検出動作時(投光動作時及び受光動作時)に、採血管50をz方向に移動可能である。つまり、採血管50が移動機構60による移動制御に従ってz方向に移動しながら、投光部110による投光光セットS10の投光及び受光部120による受光光セットS20の受光を行う。
例えば、図5では、採血管50は、界面検出動作時には、z方向の負側から正側に向かって(上方向)に移動中である。採血管50は、z方向に一定速度で移動してよい。採血管50の移動速度が一定速度である場合、一定の投光周期TPで投光光セットS10を投光することで、一定の受光周期TRで受光光セットS20を受光する。
この場合、例えば、投光部110は、第1の投光光セットS10の投光時には、第1投光期間T11に採血管50の第1空間領域R1に投光光S11を照射する。受光部120は、第1受光期間T21に、第1空間領域R1を透過した受光光S21を受光する。第1空間領域R1は、採血管50内の最下層に位置する血餅C1の層の下端付近に位置する。続いて、投光部110は、第2投光期間T12に、採血管50の第2空間領域R2に、投光光S11及び投光光S12を照射する。受光部120は、第2受光期間T22に、第2空間領域R2を透過した受光光S21及び受光光S22を受光する。第2空間領域R2は、採血管50内の血餅C1の層の位置に含まれ、第1空間領域R1の上方に第1空間領域R1に空間的に連続して位置する。制御部130は、第1空間領域R1及び第2空間領域R2を合わせた領域内に、血液サンプルCの界面が存在するか否かを判別する。
そして、投光中の第1の投光光セットS10の投光光S12の投光から次の第2の投光光セットS10の投光光S11の投光までの期間は、投光光が投光されない時間間隔TI1が存在する。そのため、受光中の受光光セットS20の受光光S22の受光から次の受光光セットS20の受光光S21の投光までの期間は、受光光が受光されない時間間隔TI2が存在する。この時間間隔TI1,TI2は、第2受光期間T22における受光光S21及び受光光S22の立下り期間S22aが加味されて定められてよい。立下り期間S22aは、受光光S21及び受光光S22の受光終了直後から、受光光S21及び受光光S22の受光量の合計が所定量以下となるまでの期間である。所定量は、値0であってもよいし、値0でなくても、次に受光される受光光セットS20の第1受光期間T21の受光光に対して重畳される残存信号が微小であり、次に受光される受光光セットS20の受光に基づく界面検出への影響を無視できる程度であればよい。例えば、第1の受光光セットS20の受光終了時点から、第1の受光光セットS20に後続する第2の受光光セットS20の受光開始時点までの期間は、立下り期間S22aよりも長い、又は立下り期間S22aと同じ長さであってよい。
投光部110は、一定の投光周期TPで、投光光セットS10を繰り返し投光する。よって、一定の投光周期TPで、投光光S11,S12の投光も繰り返される。したがって、受光部120は、一定の受光周期TRで、受光光セットS20を繰り返し受光する。よって、一定の受光周期TRで、受光光S21,S22の受光も繰り返される。
例えば、投光部110は、第1の投光光セットS10の次に、第1の投光光セットS10に後続する第2の投光光セットS10を投光する。図5では、第2の投光光セットS10の投光光S11が投光される第1空間領域R1は、採血管50内のz方向の中間付近に位置する分離材C2の層の付近に位置する。受光部120は、この第1空間領域R1を透過した受光光S21を受光する。また、第2の投光光セットS10の投光光S11及び投光光S12が投光される第2空間領域R2は、第1空間領域R1の上方に第1空間領域R1に空間的に連続して位置し、分離材C2の層の上方に位置する血清C3の層の下端付近に位置する。受光部120は、この第2空間領域R2を透過した受光光S21及び受光光S22を受光する。
同様に、投光部110は、第2の投光光セットS10の次に、第2の投光光セットS10に後続する第3の投光光セットS10を投光する。図5では、第3の投光光セットS10の投光光S11が投光される第1空間領域R1は、採血管50内のz方向の上方に位置する空気の層に位置する。受光部120は、この第1空間領域R1を透過した受光光S21を受光する。また、第3の投光光セットS10の投光光S12が投光される第2空間領域R2は、第1空間領域R1の上方に第1空間領域R1に空間的に連続して位置し、空気の層に位置する。受光部120は、この第2空間領域R2を透過した受光光S21及び受光光S22を受光する。
移動機構60による採血管50のz方向への移動速度が高速である程、繰り返し投光される垂直照射位置の空間的な間隔が広がる。つまり移動機構60による採血管50のz方向への移動速度が高速である程、検出対象についての検出結果をなるべく多く得るためには、隣り合う投光光セットS10の投光光S11が投光される垂直照射位置のz方向に沿う距離d2が、短い方が好ましい。一方、距離d2を短くするためには、投光周期TPを短くすることが必要とされる。この場合、投光光S11と投光光S12とが時間的間隔をあけて投光されていると、受光光S21と受光光S22とが混在し易くなる。
これに対し、界面検出センサ100は、投光光S11,S12を時系列で重複して投光することで、受光光S21,S22を時系列で重複して受光でき、投光周期TP及び受光周期TRを短縮し易くできる。よって、界面検出センサ100は、なるべく短期間でなるべく多くの投光光S11,S12を投光でき、なるべく短期間でなるべく多くの受光光S21,S22を受光できる。よって、距離d2をなるべく短くできる。
また、制御部130は、受光光セットS20の時系列での受光量が上り階段状に大きくなるように、投光部110に投光させる。つまり、各受光期間T2において、第1受光期間T21に受光される受光光の受光量よりも第2受光期間T22に受光される受光光の受光量の方が大きくなるように、投光部110により投光される投光光S11,S12の特性(例えば投光量又は波長)を調整する。つまり、受光側において、第1受光期間T21における受光光S21の受光量(光エネルギー)と第2受光期間T22における受光光S21及び受光光S22の受光量との合計(光エネルギー)が、時系列で上り階段状に大きくなるように調整される。
同一の受光光セットS20内において、時系列で後に受光される第2受光期間T22には、受光光S21及び受光光S22が重畳して受光される。ここで、受光光S21は第1受光期間T21から継続して受光されるので、第2受光期間T22の際には、受光光S21の特性は既知である。したがって、制御部130は、受光光S21及び受光光S22の合計の特性から既知の受光光S21の特性を差し引くことで、受光光S22の特性を算出可能である。よって、界面検出センサ100は、受光光S21,S22の双方を含む同じ受光光セットS20に基づく界面検出の精度の低下を抑制できる。
また、異なる受光光セットS20内において、先に受光される受光光セットS20の受光光S22が、後に受光される受光光セットS20の受光光S21に混在しやすくなる。これに対し、立下りを加味した時間間隔TI2が確保されることで、界面検出センサ100は、時系列で前の受光光セット20の受光光S22によって、後の受光光セットS20の受光光S21に干渉し、後の受光光セットS20に基づく界面検出の精度の劣化を抑制できる。
さらに、第2受光期間T22では、受光光S21,S22が重畳しているので、第1受光期間T21の受光光S21の受光量に対して第2受光期間T22の受光光S22の受光量を容易に大きく調整できる。よって、界面検出センサ100は、制御部130による投光光の投光量制御を簡素化でき、制御部130の処理負荷を低減できる。
図5に示した第2動作例によれば、界面検出センサ100は、時系列で重畳した投光光S11,S12が採血管50を透過後に、時系列で重畳した受光光S21,S22を取得できる。そして、界面検出センサ100は、受光光S21,S22の受光量が時系列で上り階段状に大きくなるように調整できる。また、受光光セットS20の立下り鈍りによる界面検出精度の低下を抑制できる。また、界面検出センサ100は、光パルス照射の繰り返し周期を最大化できるので、z方向に沿って多数の垂直照射位置に対応する受光光セットS20を得ることができ、z方向の界面検出の分解能を向上できる。
図6は、図3に示した第1例の受光光セットS20に含まれる各受光光S21,S22の受光タイミングと受光量との一例を示す図である。
図3では、各受光光セットS20に含まれる受光光S21,S22の受光量が一定量で受信されることを例示したが、実際には各受光光S21,S22の受光量が変化し得る。制御部130は、受光光セットS20内の受光光S21,S22の受光量を基に、時系列で受光光セットS20の時系列での受光量が上り階段状に大きくなるように、つまり第1受光期間T21に受光する受光光の受光量よりも第2受光期間T22に受光する受光光の受光量が大きくなるように、投光光S11,S12の投光順序を調整してよい。例えば、第1受光期間T21に受光する受光光の受光量よりも第2受光期間T22に受光する受光光の受光量が大きい場合、投光光S11,S12の投光順序を変更しなくてよい。現状の状態で上り階段状となっているためである。例えば、第1受光期間T21に受光する受光光の受光量よりも第2受光期間T22に受光する受光光の受光量が小さい場合、投光光S11,S12の投光順序を入れ替えてよい。これにより、界面検出センサ100は、投光順序の入れ替え後に、時系列で受光光セットS20の時系列での受光量が上り階段状に大きくなる可能性が高くなり、界面検出精度の向上が期待できる。また、例えば、第1受光期間T21に受光する受光光の受光量と第2受光期間T22に受光する受光光の受光量とが等しい場合、投光光S11,S12の投光順序を入れ替えても入れ替えなくてもよい。
制御部130は、受光部120により受光光セットS20が受光される毎に、受光光セットS20の時系列での受光量が上り階段状に大きくなるように、つまり第1受光期間T21に受光する受光光の受光量よりも第2受光期間T22に受光する受光光の受光量が大きくなるように、投光光S11,S12の順序を調整してよい。この場合、制御部130は、受光部120による受光状態を投光部110に毎回フィードバックするために、受光部120による受光状態を常時監視していてよい。そして、制御部130は、必要時に、受光部120による受光状態に応じて、投光部110による投光状態(例えば各投光光の投光量)を制御してよい。
図6では、時系列で1番目の受光光セットS20では、第1受光期間T21に受光する受光光の受光量よりも第2受光期間T22に受光する受光光の受光量が大きいので、制御部130は投光順序(投光光S11、S12の順)を入れ替えていない。その結果、時系列で2番目の受光光セットS20では、受光光S21、S22の順に受光される。また、時系列で2番目の受光光セットS20では、第1受光期間T21に受光する受光光の受光量と第2受光期間T22に受光する受光光の受光量とが等しく、制御部130は投光順序(投光光S11、S12の順)を入れ替えていない。その結果、時系列で3番目の受光光セットS20では、受光光S21、S22の順に受光される。また、時系列で3番目の受光光セットS20では、第1受光期間T21に受光する受光光の受光量よりも第2受光期間T22に受光する受光光の受光量が小さいので、制御部130は、投光順序を入れ替え、投光光S12、S11の順にしている。その結果、時系列で4番目の受光光セットS20では、受光光S22、S21の順に受光される。また、時系列で4番目の受光光セットS20では、第1受光期間T21に受光する受光光の受光量よりも第2受光期間T22に受光する受光光の受光量が大きいので、制御部130は投光順序(投光光S12、S11の順)を入れ替えていない。その結果、時系列で5番目の受光光セットS20では、受光光S22、S21の順に受光される。
図7は、図5に示した第2例の受光光セットS20に含まれる各受光光S21,S22の受光タイミングと受光量との一例を示す図である。
図5では、各受光光セットS20に含まれる受光光S21,S22の受光量が一定量で受信されることを例示したが、実際には各受光光の受光量が変化し得る。図7では、各受光光セットS20の受光期間T2に含まれる第1受光期間T21では、1つの受光光S21を受光し、第2受光期間T22では、受光光S21及び受光光S22の双方を受光する。そのため、受光光S21,S22の受光量が変化しても、第1受光期間T21の受光量よりも第2受光期間T22の受光量の方が常に大きくなる。そのため、時系列で受光光セットS20の時系列での受光量が、常に上り階段状に大きくなる。よって、上述したような投光順序の調整は不要である。
次に、投光光S11,S12の光ビーム形状について説明する。
図8は、採血管50に対する垂直照射位置と、各スキャン位置に配列された円形ビームB1及び長方形ビームB2と、の一例を示す図である。
投光部110により投光される投光光の光ビーム形状は、円形状又は長方形状等があり得る。なお、円形ビームB1及び長方形ビームB2のz方向に垂直なx方向に沿う長さl1は、受光部120の受光口のx方向に沿う長さを示す。円形ビームB1及び長方形ビームB2のz方向に沿う長さl2は、受光部120の受光口のz方向に沿う長さを示す。よって、図8を参照すると、円形ビームB1の方が、長方形ビームB2よりも、受光口により受光されない光ビームの量が多いことが理解できる。つまり、長方形ビームB2の方が円形ビームB1よりも光のエネルギ利用効率が高い。
図9A、図9B、及び図9Cは、投光光が円形ビームである場合における採血管50の位置ずれの有無に応じた観察面での投光光の進行状態を説明するための図である。
図9Aでは、採血管50内の分離材C2の層に、垂直照射位置があり、観察面が含まれており、投光光がy方向に投光されることを示している。また、図9Bは、移動機構60の保持アーム61に保持された採血管50を上方から見た様子を示している。図9Bでは、採血管50がxy平面に平行な方向において位置ずれせずに配置されており、投光光の円形ビームB1が採血管50のx方向の中央部を直進して通過することを示している。また、図9Cは、移動機構60の保持アーム61に保持された採血管50を上方から見た様子を示している。図9Cでは、採血管50がxy平面に平行な方向において位置ずれして配置されており、投光光の円形ビームB1が、採血管50のx方向の中央部から若干ずれて採血管50内に入射し、採血管50内で屈折して採血管50外に出射することを示している。
図10A、図10B、及び図10Cは、投光光が長方形ビームB2である場合における採血管50の位置ずれの有無に応じた観察面での投光光の進行状態を説明するための図である。
図10Aでは、採血管50内の分離材C2の層に、垂直照射位置があり、観察面が含まれており、投光光がy方向に投光されることを示している。また、図10Bは、移動機構60の保持アーム61に保持された採血管50を上方から見た様子を示している。図10Bでは、採血管50がxy平面に平行な方向において位置ずれせずに配置されており、投光光の長方形ビームB2が採血管50のx方向の中央部を直進して通過することを示している。また、図10Cは、移動機構60の保持アーム61に保持された採血管50を上方から見た様子を示している。図10Cでは、採血管50がxy平面に平行な方向において位置ずれして配置されており、投光光の長方形ビームB2が、採血管50のx方向の中央部から若干ずれて採血管50内に入射している。しかし、長方形ビームB2は、採血管50内で屈折するものの、受光部120の光軸上に長方形ビームB2の大部分が存在する状態で、採血管50外に出射することを示している。
したがって、図10Cでは、図9Cの円形ビームB1の場合と比較すると、採血管50のxy平面での位置ずれが発生しても、受光部120の光軸OC上に長方形ビームB2の大部分が存在する。よって、界面検出センサ100は、受光部120が長方形ビームB2としての受光光の大部分を受光でき、界面検出精度の低下を抑制できる。
図11Aは、投光光が円形ビームB1である場合の、投光光に対応する受光光の受光量の一例を示す図である。
円形ビームB1は、x方向の長さとz方向の長さが等しいので、採血管50の幅に合わせてx方向の長さを長くすると、z方向の長さも長くなる。この場合、z方向の広範囲において血液サンプルC内の各層の状態に影響を受け易い。例えば、実際には血清C3の層の成分の検出を希望する場合でも、血清C3の上下に存在する分離材C2の層と空気の層とを透過した受光光が取得され得る。そのため、血液サンプルC内の各層の界面付近の受光量が、滑らかに変化する傾向がある。
図11Bは、投光光が長方形ビームB2である場合の、投光光に対応する受光光の受光量の一例を示す図である。
長方形ビームB2は、x方向の長さよりもz方向の長さを短くできる。図11Bでは、採血管50の幅に合わせてx方向の長さを長くする一方、z方向の長さをx方向よりも短くしている。この場合、界面検出センサ100は、z方向の広範囲において血液サンプルC内の各層の状態に影響を受けることを抑制できる。そのため、血液サンプルC内の各層の界面付近を透過した受光光の受光量が、鋭く変化する傾向がある。よって、界面検出センサ100は、受光光の受光量に基づく界面検出精度を高くできる。
なお、円形ビームB1及び長方形ビームB2のx方向の長さは、採血管50の幅よりも短いことが好ましい。採血管50内を通らない光を受光することで、界面検出の精度が低下することを回避するためである。
なお、波長λ1の投光光S11及び波長λ2の投光光S12は、血餅C1に対する透過率がいずれも低い。また、波長λ1の投光光S11は、血清C3に対する透過率が低く、波長λ2の投光光S12は、血清C3に対する透過率が高い。また、波長λ1の投光光S11及び波長λ2の投光光S12は、分離材C2に対する透過率がいずれも高い。また、波長λ1の投光光S11及び波長λ2の投光光S12は、空気に対する透過率が、分離材C2に対する透過率よりもさらに高い。そのため、時系列で先に投光光S11が投光され、後に投光光S12が投光されることで、受光光セットS20の時系列での受光量は、上り階段状に大きくなり易い。
受光部120により受光された受光光セットS20は、血液サンプルCを透過した受光光S21と受光光S22との双方を含む。よって、受光光セットS20の受光量は、小さい方から順に並べると、血餅C1、血清C3、分離材C2、及び空気の順となる。
このように、投光光のビーム形状のz方向の長さが、このビーム形状のx方向の長さよりも短いことで、界面検出センサ100は、界面検出のための各垂直照射位置でのデータの測定性及びデータの測定の安定性を向上できる。界面検出センサ100は、z方向におけるスキャン(検出)間隔を短くすることができ、検出分解能を向上させることができる。したがって、z方向の変化に対する感度を高くできる。また、ビーム形状のx方向の長さを確保することで、採血管50内の血液サンプルCを透過した受光光を広く取得でき、採血管50が多少位置ずれしても、光軸OC上に光が含まれやすいので、測定安定性が向上する。なお、ビーム形状のz方向の長さが、このビーム形状のx方向の長さよりも短い場合、ビーム形状は、長方形状に限られず、その他の形状(例えば楕円形状)を含んでもよい。
次に、本実施形態における時間的隣接及び空間的隣接の効果について説明する。
図12は、受光光セットS20内の複数の受光光S21,S22の時間的隣接の効果を説明するための図である。
図12では、比較例として、時系列で隔絶して交互に2つの異なる波長の2つの受光光S21X,S22Xが得られる場合と、本実施形態として、時系列で隣接して交互に2つの異なる波長λ1,λ2の2つの受光光S21、S22が得られる場合と、を示している。図12の時系列で隔絶される場合と時系列で隣接する場合とでは、受光周期は同じであることを想定する。また、界面を検出するための2つの受光光を抽出するサンプリング間隔SIは、受光周期の半分程度の間隔であることを想定する。また、移動機構60によって、採血管50がz方向に連続して一定速度で移動されることを想定する。
この場合、図12に示すように、比較例のように時系列で隔絶される場合には、1つのサンプリング間隔SIの内側に、2つの異なる波長のうちのいずれかの波長の1つの受光光だけが含まれる。一方、実施形態のように時系列で隣接する場合には、1つのサンプリング間隔SIの内側に、2つの異なる波長の2つの受光光S21,S22(受光光セットS20)がいずれも含まれる。
よって、比較例では、血液サンプルCにおける空間的なサンプリング間隔に対応する空間領域に含まれる1つの受光光の受光量に基づいて界面検出するので、この空間領域における界面の検出精度が不十分となる。これに対し、本実施形態の界面検出センサ100は、血液サンプルCにおける空間的なサンプリング間隔に対応する空間領域に含まれる2つの受光光の受光光に基づいて界面検出することで、この空間領域における界面を高精度に検出できる。
また、血餅C1の層は、白血球及び血小板を含むバフィーコートC12の層と、赤血球C11を含む層と、を含む。バフィーコートC12の層のz方向の長さは、赤血球C11の層のz方向の長さよりも極めて短く、極めてz方向の厚みが薄い空間領域となっている。本実施形態の界面検出センサ100は、血液サンプルCにおける空間的なサンプリング間隔に対応する空間領域にこのようなバフィーコートC12が含まれる場合でも、バフィーコートC12の層の界面を高精度に検出できる。このように、界面検出センサ100は、z方向の長さが短い微小領域の透過光量(受光量)測定を、2つの異なる波長λ1,λ2を有する2つの受光光S21,S22を用いて高精度を実施できる。
図13は、血液サンプルCのz方向に並ぶスキャン領域の空間的隣接の効果を説明するための図である。図13では、投光部110による投光周期TPを一定(例えば上限、最短)にした状態で、採血管50のz方向の移動速度(スキャン速度)がV1,V2,V3である場合の、z方向における2つの投光光を照射する垂直照射位置(空間領域)のパターンを、複数例示している。ここでは、V3、V2、V1の順に高速(つまりV3>V2>V1)である。
図13では、比較例として、空間的に隔絶された2つの垂直照射位置を示している。また、本実施形態として、空間的に隣接した2つの垂直照射位置を示している。界面検出のためには、波長の異なる2つの受光光が必要となる。
図13では、空間的に垂直照射位置が隔絶している場合、波長の異なる2つの受光光を得るために必要なz方向の長さが長くなり、この2つの受光光に基づく界面検出の対象となる空間領域が広範囲になる。または、同じ垂直照射位置で異なる波長の受光光が得られるまで待機し、同じ垂直照射位置で得られた2つの受光光のペアを用いて界面検出しようとすると、界面検出に要する時間が長時間化する。さらに、スキャン速度V3のように高速である場合、同じ垂直照射位置では波長の異なる受光光のペアを得ることができないこともある。
これに対し、空間的に垂直照射位置が隣接している場合、波長の異なる2つの受光光を得るために必要なz方向の長さが短くなり、この2つの受光光に基づく界面検出の対象となる空間領域が狭範囲になる。したがって、空間的に垂直照射位置が隔絶している場合よりも、本実施形態のように空間的に垂直照射位置が隣接する方が、界面検出の精度が高くなる。さらに、界面検出センサ100は、スキャン速度に依存せずに、隣接する2つの垂直照射位置で受光される受光光S21,S22を得ることができるので、採血管50のz方向の移動速度を高速化しても、界面検出精度が低下することを抑制でき、スキャン速度の選択性を向上できる。
このように、本実施形態の界面検出センサ100によれば、血液サンプルC中の血餅C1又は血清C3等の下面又は上面等の界面を検出できる。そして、界面検出センサ100は、例えば検出された血清C3の下面及び上面の界面を基に、血清量を容易に取得できる。また、界面検出センサ100は、タクトタイム(例えば検出対象全体の界面検出に要する時間)の向上と界面検出精度の向上とを実現できる。また、界面検出センサ100は、z方向での単位長さ当たりの垂直照射位置の数、つまりz方向の単位長さあたりの光パルスの数を維持又は増加等させることができる。そのため、タクトタイム向上のため検出対象を収容する採血管50のスキャン速度を高速化する場合でも、界面検出精度を維持又は向上できる。また、単位時間当たりに照射される光の総量総パワー(平均パワー)の増大を抑制して、効率良く界面を検出できる。
また、界面検出センサ100は、投光光セットS10として2つの投光光S11,S12を連続して投光することで、採血管50のスキャン速度が高速化されても、照射される光パルスの間隔が広がることを抑制でき、2つの投光光S11,S12の時間的及び空間的な一致性が低下することを抑制できる。よって、界面検出センサ100は、微小な層(例えば、バッフィーコート(約1mm厚)、メニスカス(約2mm厚)の検出データが取得できなったり、微小な層の界面判定の精度が低下したりすることを抑制できる。
以上、図面を参照しながら各種の実施形態について説明したが、本発明はかかる例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。また、発明の趣旨を逸脱しない範囲において、上記実施形態における各構成要素を任意に組み合わせてもよい。
上記実施形態では、採血管50は、採血管50に収容された血液サンプルCの界面検出動作時に、z方向の負側から正側に向かう方向(上方向)に移動することを例示したが、この逆方向(下方向)に移動してもよい。
上記実施形態では、図3、図4A~図4C、及び図5では、投光部110が、基本の投光動作として、波長λ1を有する投光光を時系列で先に投光し、波長λ2を有する投光光を時系列で後に投光することを例示したが、これに限られない。投光部110は、基本の投光動作として、波長λ2を有する投光光を時系列で先に投光し、波長λ1を有する投光光を時系列で後に投光してもよい。
上記実施形態では、界面検出センサ100と採血管50とのz方向に沿う相対的な位置関係を変更可能であることを例示したが、これに限られない。例えば、界面検出センサ100が採血管50の長さをカバーするように長尺のもので、z方向に複数の投光素子及びその複数の投光素子に対応する受光素子を備えた、いわゆる多光軸光電センサを構成して、界面検出センサ100は、界面検出センサ100(例えば投光部110又は受光部120)と採血管50とのz方向に沿う相対的な位置関係が不変であってもよい。この場合、制御部130が、投光部110から投光される投光光の投光方向を順次変更することで、採血管50への投光光の照射位置を順次変更するようにしてもよい。
上記実施形態では、CPU等のプロセッサは、物理的にどのように構成してもよい。また、プログラム可能なプロセッサを用いれば、プログラムの変更により処理内容を変更できるので、プロセッサの設計の自由度を高めることができる。プロセッサは、1つの半導体チップで構成してもよいし、物理的に複数の半導体チップで構成してもよい。複数の半導体チップで構成する場合、上記実施形態の各制御をそれぞれ別の半導体チップで実現してもよい。この場合、それらの複数の半導体チップで1つのプロセッサを構成すると考えることができる。また、プロセッサは、半導体チップと別の機能を有する部材(コンデンサ等)で構成してもよい。また、プロセッサが有する機能とそれ以外の機能とを実現するように、1つの半導体チップを構成してもよい。また、複数のプロセッサが1つのプロセッサで構成されてもよい。
以上のように、上記実施形態の界面検出センサ100は、投光部110と、受光部120と、制御部130と、を備える。投光部110は、複数の層を有する血液サンプルC(検出対象の一例)に、波長λ1(第1波長の一例)を有する投光光S11(第1の投光光の一例)と波長λ2(第2波長の一例)を有する投光光S12(第2の投光光の一例)とを含む投光光セットS10を順次投光する。受光部120は、投光光S11が検出対象を透過した信号である受光光S21(第1の受光光の一例)と、投光光S12が検出対象を透過した信号である受光光S22(第2の受光光の一例)と、を含む受光光セットS20を順次受光する。制御部130は、投光部110による投光タイミングと受光部120による受光タイミングとを同期させ、順次受光された受光光セットS20に基づいて、検出対象に含まれる複数の層(例えば血餅C1、分離材C2、血清C3の各層)の界面を検出する。投光部110は、投光光S11の投光中又は投光終了時に投光光S12の投光を開始する。
これにより、受光光S21と受光光S22との受光期間が時間的に連続しているので、受光光S21と受光光S22による検出対象の検出領域が空間的に連続した領域となる。そのため、界面検出センサ100は、受光光セットS20による検出領域がスキャン方向(例えばz方向)に沿った微小な長さを有する微小領域であっても、この検出領域での界面検出精度を維持できる。また、受光光S21及び受光光S22による検出領域が空間的に連続した領域となることで、スキャン速度に依存せずに、受光光セットS20による検出領域に対して2つの受光光S21,S22に基づいて界面検出できる。よって、界面検出センサ100は、スキャン速度の高速化を実現できる。このように、界面検出センサ100は、検出対象を走査するスキャン速度を高速化しつつ、検出対象内の界面検出精度の低下を抑制できる。また、投光光S11と投光光S12との投光タイミングが完全に一致しないことで、受光光S21と受光光S21との受光タイミングが完全に一致しない。そのため、界面検出センサ100は、例えば各受光光を含む受光光セットS20の特性から既知の受光光の特性を差し引くことで、未知の受光光の特性を得ることができ、それぞれの受光光S21,S22を識別できる。
また、受光部120は、投光部110による投光光セットS10の投光に同期して、受光光S21の受光中又は受光終了時に受光光S22の受光を開始してよい。制御部130は、受光光セットS20の受光量のうち、受光光S22の受光開始前の受光部120による受光光の受光量よりも、受光光S22の受光開始以降の受光部120による受光光の受光量が大きくなるように、投光部110に投光光セットS10を投光させてよい。
これにより、受光光S22の受光開始前の期間である第1受光期間T21での受光光の受光量よりも、受光光S22の受光開始以降の期間である第2受光期間T22での受光光の受光量が大きくなる。つまり、受光光セットS20の受光量は、時系列で上り階段状に大きくなる。また、受光光S21と受光光S22とが連続して受光されるので、第1受光期間T21に受光される受光光S21の立下りが第2受光期間T22に残存し得る。この場合でも、受光量が上り階段状に大きくなることで、残存する受光光S21の立下り成分が第2受光期間T22の受光量に対して十分に小さい。したがって、界面検出センサ100は、第1受光期間T21に受光される受光光が第2受光期間T22に受光される受光光に干渉し、双方の受光光を含む同じ受光光セットS20に基づく界面検出の精度の低下を抑制できる。また、受光光セットS20の特性から既知の受光光S21の特性を差し引くことで、未知の受光光S22の特性を得て、界面検出精度の低下が抑制されてもよい。
また、受光部120は、第1の受光光セットS20に後続して第2の受光光セットS20を受光してよい。第1の受光光セットS20の受光終了時点から第2の受光光セットの受光開始時点までの第1の期間は、第1の受光光セットS20の受光終了時点の受光量の立下りに要する立下り期間S22aよりも長い、又はこの立下り期間S22aと同じ長さでよい。
これにより、界面検出センサ100は、第2受光期間T22に受光した受光光(少なくとも受光光S22)の立下りが第2受光期間T22以降に残存しても、次に受光される受光光セットS20を受光するまでに時間間隔TI2が確保されることで、後続の受光光セットS20に基づく界面検出精度の低下を抑制できる。なお、第2受光期間T22に受光した受光光の立下りは、受光光セットS20の受光終了時点の受光量の立下りに相当する。
また、投光部110は、検出対象に対する投光光S11の透過率と、検出対象に対する投光光S12の透過率と、に基づいて、投光光S11の投光量と、投光光S12の投光量と、を決定してよい。
これにより、界面検出センサ100は、各投光光の透過率を加味して、各投光光の投光量を様々な投光量に調整できる。例えば、界面検出センサ100は、検出対象に対する投光光の透過率が大きい程、検出対象を透過し易く減衰し難いので、投光光の投光量を小さく決定できる。一方、界面検出センサ100は、検出対象に対する透過率が小さい程、検出対象を透過し難く減衰し易いので、投光光の投光量を大きく決定できる。この場合でも、界面検出センサ100は、受光光セットS20の受光量が時系列で上り階段状に大きくなることで、界面検出精度の低下を抑制できる。
また、制御部130は、受光光セットS20の受光量に含まれる、受光光S22の受光開始前の受光部120による受光光の受光量である第1の受光量と、受光光S22の受光開始以降の受光部120による受光光の受光量である第2の受光量と、を比較してよい。制御部130は、第1の受光量が第2の受光量よりも大きい場合、投光光S11と投光光S12との投光順序を入れ替えるよう投光部110に指示してよい。
これにより、界面検出センサ100は、実際の第1受光期間T21の受光光の受光量と第2受光期間T22の受光光の受光量とに応じて、受光光セットS20の受光量が時系列で上り階段状に大きくなるように、投光部110にフィードバックできる。よって、界面検出センサ100は、予め各投光光の特性を把握しておかなくても、投光部110による各投光光の投光順序を、受光側で上記の上り階段状になるように調整できる。また、予め各投光光の特性を把握して各投光光の投光順序を調整した場合であって、検出対象の検出環境によって意図せずに各受光光の受光量の大きさが逆転し得る。この場合でも、界面検出センサ100は、実際の各受光光の受光量に応じて、投光部110による各投光光の投光順序を、受光側で上記の上り階段状になるように調整できる。
また、検出対象は、採血管50(収容器の一例)に収容されて第1の方向(例えばz方向、鉛直方向)に沿って延在してよい。第1の方向に沿って投光部110に対する検出対象の位置が移動可能であってよい。投光部110は、検出対象の第1の方向に沿った連続する位置(例えば垂直照射位置)に対して、第1の方向に垂直な方向(例えばy方向)に、投光光セットS10を順次投光してよい。
これにより、界面検出センサ100は、検出対象の第1の方向に沿った連続する位置で異なる波長を有する複数の受光光S21,S22の受光量を検出でき、検出された受光量に応じて界面検出できる。よって、界面検出センサ100は、空間的に連続する狭領域において、界面検出できる。
また、投光部110により投光される投光光S11及び投光光S12の、第1の方向に平行な方向の長さは、第1の方向に対して垂直且つ投光光S11及び投光光S12の進行方向(例えばy方向)に対して垂直な方向(例えばx方向)の長さよりも短い、
投光光S11,S12のビームのz方向の長さとx方向の長さとが同じ(例えばビーム形状が円形又は正方形状)である場合には、z方向の検出間隔を狭めて界面検出精度を高めるようとすると、投光光のビームのz方向及びx方向の長さが短くなる。そのため、例えば検出対象が収容された採血管50に軸ずれが発生するなどして検出対象がx方向にずれた場合には、受光光S21,S22が受光部120に受光されない可能性が高くなる。そのため、受光光S21,S22の受光の安定性が低下し、界面検出精度が低下し得る。これに対し、界面検出センサ100は、各投光光S11,S12のビームのz方向の長さをx方向よりも短くすることで、空間的な検出間隔を狭めて界面検出精度を向上でき、且つ、検出対象のx方向のずれが発生しても受光光の受光の安定性を維持できる。このように、投光光のビームの光エネルギの利用効率を高くできる。
また、検出対象は、血液サンプルCでよい。複数の層は、血清C3の層及び血餅C1の層を含んでよい。
血液サンプルC中の血清C3及び血餅C1では、波長λ1及び波長λ2での透過率が異なる。界面検出センサ100は、この透過率の差分を利用して、例えば、血液サンプルC中の血清C3の層及び血餅C1の層との界面や、他の層との界面を検出できる。
(項目1)
複数の層を有する検出対象に、第1波長を有する第1の投光光と第2波長を有する第2の投光光とを含む投光光セットを順次投光する投光部と、
前記第1の投光光が前記検出対象を透過した信号である第1の受光光と、前記第2の投光光が前記検出対象を透過した信号である第2の受光光と、を含む受光光セットを順次受光する受光部と、
前記投光部による投光タイミングと前記受光部による受光タイミングとを同期させ、順次受光された前記受光光セットに基づいて、前記検出対象に含まれる前記複数の層の界面を検出する制御部と、
を備え、
前記投光部は、前記第1の投光光の投光中又は投光終了時に前記第2の投光光の投光を開始する、
界面検出センサ。
(項目2)
前記受光部は、前記投光部による前記投光光セットの投光に同期して、前記第1の受光光の受光中又は受光終了時に前記第2の受光光の受光を開始し、
前記制御部は、前記受光光セットの受光量のうち、前記第2の受光光の受光開始前の前記受光部による受光光の受光量よりも、前記第2の受光光の受光開始以降の前記受光部による受光光の受光量が大きくなるように、前記投光部に前記投光光セットを投光させる、
項目1に記載の界面検出センサ。
(項目3)
前記受光部は、第1の受光光セットに後続して第2の受光光セットを受光し、
前記第1の受光光セットの受光終了時点から前記第2の受光光セットの受光開始時点までの第1の期間は、前記第1の受光光セットの受光終了時点の受光量の立下りに要する立下り期間よりも長い、又は前記立下り期間と同じ長さである、
項目2に記載の界面検出センサ。
(項目4)
前記投光部は、
前記検出対象に対する前記第1の投光光の透過率と、前記検出対象に対する前記第2の投光光の透過率と、に基づいて、前記第1の投光光の投光量と、前記第2の投光光の投光量と、を決定する、
項目2又は3に記載の界面検出センサ。
(項目5)
前記制御部は、
前記受光光セットの受光量に含まれる、前記第2の受光光の受光開始前の前記受光部による受光光の受光量である第1の受光量と、前記第2の受光光の受光開始以降の前記受光部による受光光の受光量である第2の受光量と、を比較し、
前記第1の受光量が前記第2の受光量よりも大きい場合、前記第1の投光光と前記第2の投光光との投光順序を入れ替えるよう前記投光部に指示する、
項目2~4のいずれか1項に記載の界面検出センサ。
(項目6)
前記検出対象は、収容器に収容されて第1の方向に沿って延在し、
前記第1の方向に沿って前記投光部に対する前記検出対象の位置が移動可能であり、
前記投光部は、前記検出対象の第1の方向に沿った連続する位置に対して、前記第1の方向に垂直な方向に、前記投光光セットを順次投光する、
項目1~5のいずれか1項に記載の界面検出センサ。
(項目7)
前記投光部により投光される前記第1の投光光及び前記第2の投光光の、前記第1の方向に平行な方向の長さは、前記第1の方向に対して垂直且つ前記第1の投光光及び前記第2の投光光の進行方向に対して垂直な方向の長さよりも短い、
項目6に記載の界面検出センサ。
(項目8)
前記検出対象は、血液サンプルであり、
前記複数の層は、血清の層及び血餅の層を含む、
項目1~7のいずれか1項に記載の界面検出センサ。
(項目9)
複数の層を有する検出対象に、第1波長を有する第1の投光光を投光するステップと、
前記検出対象に、前記第1の投光光の投光中又は投光終了時に、第2波長を有する第2の投光光の投光を開始することで、前記第2の投光光を投光するステップと、
前記第1の投光光が前記検出対象を透過した信号である第1の受光光と、前記第2の投光光が前記検出対象を透過した信号である第2の受光光と、を含む受光光セットを受光するステップと、
前記受光光セットに基づいて、前記検出対象に含まれる前記複数の層の界面を検出するステップと、
を有する界面検出方法。