以下、本発明の実施の形態について、図面を参照して詳細に説明する。
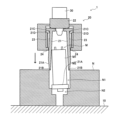
図1は、本発明の一実施の形態に係る圧入装置1の構成を表すものであり、(A)は縦方向において切断した端面図であり、(B)は(A)に示したI-I線に沿った端面図である。図2から図4は、圧入装置1の動作を表すものである。図2、図3及び図4(A)は縦方向において切断した端面図であり、図4(B)は図4(A)に示したII-II線に沿った端面図である。
この圧入装置1は、棒状部M1の外周に突出して圧入部M2が設けられた取付部材Mを、被取付部材Nに設けられた配置凹部N1に配置し、配置凹部N1の底部に設けられた圧入凹部N2に対して圧入部M2を圧入することにより取り付けるものである。配置凹部N1の大きさは、例えば、圧入部M2よりも大きく形成されている。圧入凹部N2の大きさは、例えば、圧入部M2よりも少し小さく形成されている。
圧入装置1は、被取付部材Nを保持する治具や載置台等の保持手段10と、圧入部M2を押圧することにより、圧入部M2を圧入凹部N2に圧入する押圧手段20と、保持手段10と押圧手段20とを相対的に接近又は離間する方向に移動させる移動手段30とを備えている。なお、図1では、移動手段30により押圧手段20を保持手段10に対して移動させる場合を示したが、保持手段10を押圧手段20に対して移動させるようにしてもよく、また、保持手段10及び押圧手段20の両方を移動させるようにしてもよい。
押圧手段20は、例えば、押圧方向において圧入部M2に接近したときに、棒状部M1の周囲に位置して圧入部M2を押圧する複数の爪部21と、各爪部21を支持し、押圧方向に移動させる爪支持部22と、各爪部21を付勢する付勢部材23とを有している。各爪部21は、例えば、棒状部M1の周囲を囲むことができるように構成されており、配置凹部N1と棒状部材M1との間に挿入されて、圧入部M2を押圧できる厚み及び長さとされている。各爪部21は、例えば、圧入部M2を押圧する際に、棒状部M1の外周全体を囲むように周方向に分割して設けられていることが好ましい。圧入部M2を全周において押圧することができるからである。
各爪部21は、爪支持部22に対して、先端部が互いに接近又は離間する方向に開閉可能に配設されている。なお、爪部21の先端部というのは、圧入部M2の側の端部である。各爪部21の先端部は、例えば、押圧方向において圧入部M2から離間しているときには互いに離間し、押圧方向において圧入部M2に接近しているときには互いに接近するように構成されている。これにより、配置凹部N1に配置した取付部材Mが倒れて傾いていても、各爪部21の先端部が閉じることにより、取付部材Mの姿勢を垂直に修正することができるようになっている。
各爪部21は、例えば、付勢部材23により、先端部が互いに離間する方向に付勢されている。付勢部材23は、例えば、圧縮コイルばねにより構成することが好ましい。付勢部材23の一端部は、例えば、各爪部21の基端側において外側に向かい突出して設けられた第1固定部21Cに対して配設されている。なお、爪部21の基端側というのは、爪支持部22の側の端部である。第1固定部21Cは、各爪部21が爪支持部22に対して開閉可能に配設された支点よりも外周側に設けられており、第1固定部21Cと爪支持部22との間には、例えば、第1固定部21Cが支点を中心として回動することができる空間が設けられている。
また、第1固定部21Cと付勢部材23の一端部との間には、例えば、第1固定部21Cと外周側の位置において接触するように配設されたワッシャー等よりなる力点調整部材21Dが配設されていることが好ましい。力点調整部材21Dを介して付勢部材23を第1固定部21Cに配設することにより、力点と支点との距離を長くし、容易に各爪部21の先端部を開くことができるようにするためである。
付勢部材23の他端部は、例えば、各爪部21の外周において、第1固定部21Cよりも先端側に第1固定部21Cと対向するように設けられた第2固定部24に対して配設されている。付勢部材23を例えば圧縮コイルばねで構成することにより、第1固定部21Cには第2固定部24の側から押圧する力が加わり、各爪部21は、支点を中心として回動し、先端部が開く方向に付勢される。
また、付勢部材23として、第2固定部24付近に磁石を設置し、磁力による付勢を行うようにしてもよい。例えば、第2固定部24の爪部21に対向する面に磁石を設置し、爪部21を鉄などの強磁性体により構成することにより、先端部が開く方向に付勢することができる。付勢部材23は、圧縮コイルばねに代えて、又は、圧縮コイルばねと共に、磁石による付勢を行ってもよい。
各爪部21の先端部外側には、先端に向かい内側に傾斜された傾斜面21Aが形成されていることが好ましい。各爪部21の先端部を開いた状態で、配置凹部N1と棒状部M1との間の間隔を必要以上に広くせずに、挿入することができるようにするためである。各爪部21の傾斜面先端部21Bは、開いた状態において、配置凹部N1の内側の領域に位置するように構成することが好ましい。これにより、前記爪部21の先端部は、押圧方向において圧入部M2に接近する際に、配置凹部N1の内周面により閉じる方向に押圧されるようになっている。なお、各爪部21の傾斜面先端部21Bは、閉じた状態のときに棒状部M1の外周部に位置するので、開いた状態のときは、垂直に配置された棒状部M1の外周面よりも外側の領域に位置している。
各爪部21の先端部の開いたときの位置は、例えば、第2固定部23により各爪部21を係止することにより、各爪部21が所定位置よりも開かないように制御することができる。すなわち、第2固定部23は、各爪部21の先端部が開く方向に移動する際に、各爪部21を係止してその移動範囲を制御する係止部としても機能させることができる。なお、各爪部21の先端部の開いたときの位置は、例えば、各爪部21を係止するのではなく、支点と力点との位置関係、及び、付勢部材23により加えられる力の大きさを調整することにより、制御するようにしてもよい。
爪部21の数は、複数であれば限定されないが、例えば、3個以上6個以下とすることが好ましく、4個が最も好ましい。3個以上とした方が、取付部材Mがどの方向に傾いたとしても傾きを拾って姿勢を容易に垂直に修正することができ、一方で、数が多くなり過ぎると構造が複雑になるからである。
この圧入装置1は、例えば、次のようにして用いられる。まず、例えば、被取付部材Nを保持手段10の上に載置し、被取付部材Nの配置凹部N1に、取付部材Mの圧入部M2を下にして配置する。次いで、例えば、移動手段30により押圧手段20を保持手段10に近づける方向に移動させる。これにより、各爪部21は、先端部が開いた状態で、押圧手段20の移動に伴い、圧入部M2に接近する方向に移動する。
その際、配置凹部N1に配置された取付部材Mが倒れて傾いていると、例えば、図2に示したように、棒状部M1の上端部が傾いている側の爪部21の内側に当接し、各爪部21の圧入部M2への更なる接近に伴い、棒状部M1は内側に押される。次いで、各爪部21が圧入部M2に更に接近し、各爪部21の先端部が配設凹部N1に到達すると、例えば、図3に示したように、各爪部21の傾斜面21Aが配設凹部N1の内周面に当接し、各爪部21の圧入部M2への更なる接近に伴い、各爪部21は内側に押され、棒状部M1は内側に更に押される。
続いて、各爪部21が圧入部M2に更に接近すると、例えば、各爪部21の傾斜面21Aが配置凹部N1の内側に入り込み、各爪部21の先端部は閉じた状態となり、取付部材Mは垂直となり、姿勢が修正される。更に、各爪部21が圧入部M2に接近し、各爪部21の先端部、すなわち傾斜面先端部21Bが圧入部M2に到達すると、例えば、図4に示したように、各爪部21の先端部により圧入部M2が押圧され、圧入凹部N2に圧入される。
また、取付部材Mを取り付けた後、移動手段30により押圧手段20を保持手段10から離れる方向に移動させる。これにより、各爪部21は、圧入部M2から離間する方向に移動し、各爪部21の先端部が配置凹部N1よりも上まで移動すると、各爪部21の先端部は、付勢部材により開く方向に付勢され、開いた状態となる。
このように本実施の形態によれば、押圧方向において圧入部M2から離間しているときに先端部が互いに離間し、押圧方向において圧入部M2に接近しているときに先端部が互いに接近する複数の爪部21を有するようにしたので、配置凹部N1に配置した取付部材Mが倒れて傾いていても、爪部21の先端が閉じることにより取付部材Mを垂直に起こし、姿勢を修正することができる。よって、取付部材Mを垂直に圧入して取り付けることができる。
以上、実施の形態を挙げて本発明を説明したが、本発明は上記実施の形態に限定されるものではなく、種々変形可能である。例えば、上記実施の形態では、各構成要素について具体的に説明したが、全ての構成要素を備えていなくてもよく、他の構成要素を備えていてもよい。また、各構成要素の要件は、異なっていてもよい。
また、上記実施の形態では、各爪部21を棒状部M1の外周全体を囲むように周方向に分割して設ける場合について説明したが、各爪部21は間隔を開けて設けるようにしてもよい。