JP7686888B2 - 搬送デバイスの作業空間中の除外ゾーンを決定すること - Google Patents
搬送デバイスの作業空間中の除外ゾーンを決定すること Download PDFInfo
- Publication number
- JP7686888B2 JP7686888B2 JP2024531347A JP2024531347A JP7686888B2 JP 7686888 B2 JP7686888 B2 JP 7686888B2 JP 2024531347 A JP2024531347 A JP 2024531347A JP 2024531347 A JP2024531347 A JP 2024531347A JP 7686888 B2 JP7686888 B2 JP 7686888B2
- Authority
- JP
- Japan
- Prior art keywords
- grid
- workspace
- image
- transport device
- exclusion zone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
- G06Q10/047—Optimisation of routes or paths, e.g. travelling salesman problem
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0464—Storage devices mechanical with access from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0044—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with a computer generated representation of the environment of the vehicle, e.g. virtual reality, maps
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/222—Remote-control arrangements operated by humans
- G05D1/224—Output arrangements on the remote controller, e.g. displays, haptics or speakers
- G05D1/2244—Optic
- G05D1/2247—Optic providing the operator with simple or augmented images from one or more cameras
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/617—Safety or protection, e.g. defining protection zones around obstacles or avoiding hazards
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/02—Control or detection
- B65G2203/0266—Control or detection relating to the load carrier(s)
- B65G2203/0275—Damage on the load carrier
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/041—Camera
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Marketing (AREA)
- Theoretical Computer Science (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Development Economics (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Game Theory and Decision Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Image Processing (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Image Analysis (AREA)
- Warehouses Or Storage Devices (AREA)
- Control Of Conveyors (AREA)
Description
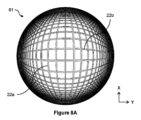
較正プロセス130は、図13に示されている例に従って、超広角カメラ71によってキャプチャされた、グリッド15のセクション、すなわちグリッドセクションの画像を取得すること131を含む。画像を取得することは、たとえば、プロセッサにおいて、画像を表現する画像データを取得すること、たとえば、受信することを含む。たとえば、画像データは、インターフェース、たとえば、カメラシリアルインターフェース(CSI)を介して、受信され得る。画像信号プロセッサ(ISP)が、画像データを表示のために準備するために、画像データの初期処理、たとえば、飽和補正、再正規化、ホワイトバランス調整および/またはデモザイキングを実施し得る。
図9は、ニューラルネットワークアーキテクチャの一例を示す。例示的なニューラルネットワーク90は、畳み込みニューラルネットワーク(CNN)である。CNNの一例は、フライブルク大学のコンピュータサイエンス学部によって開発されたU-Netアーキテクチャであるが、他のCNN、たとえば、VGG-16 CNNが使用可能である。CNN90への入力91が、この例では画像データを備える。入力画像データ91は、所与の数のピクセル幅および所与の数のピクセル高さであり、1つまたは複数の色チャネル(たとえば、赤色、緑色および青色チャネル)を含む。
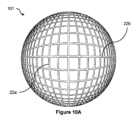
グリッド15上の現実世界のポイントを、カメラによってキャプチャされた画像中のピクセルにマッピングすることが、算出アルゴリズムによって行われる。グリッドポイントは、最初に、超広角カメラ71に対応する平面上に投影される。たとえば、回転行列を使用する回転と、X方向およびY方向における平面並進とのうちの少なくとも1つが、グリッドフレームワーク構造14中のx、y、およびz座標を有するポイントに適用される。超広角カメラの焦点距離fは、グリッド15に対する3次元座標をもつポイントを、超広角カメラ71に対する2次元平面上に投影するために使用され得る。たとえば、超広角カメラ71の平面におけるマッピングされたポイントqの座標は、q=f・p[x,y]÷pzとして計算され、ここで、p[x,y]およびpzは、それぞれ、グリッド15に対するポイントpの平面x-y座標および第3のz座標である。
カメラ71によってキャプチャされた画像中のピクセルをグリッド15上の現実世界のポイントにマッピングすることが、異なる算出アルゴリズムによって行われる。たとえば、画像からグリッドへのマッピングアルゴリズムは、上記で説明されたグリッドから画像へのマッピングアルゴリズムの逆であり、各数学演算が反転される。


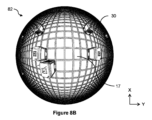
グリッド上の搬送デバイス30を検出するために、カメラ71によってキャプチャされたひずんだ画像82を処理するための方法およびシステムが、本明細書で提供される。たとえば、グリッド15に対する検出された搬送デバイス30のロケーションが、出力され得る。いくつかの例では、検出された搬送デバイス30の識別情報、たとえば一意のIDラベルが、出力され得る。次に、そのような例がより詳細に説明される。
作業空間中の搬送デバイス30を検出する方法140は、画像82中の複数のそれぞれのグリッド空間17における複数の仮想搬送デバイスに対応するさらなるアノテーションデータを生成することを含むことができる。グリッド15上の検出された搬送デバイス30のロケーションは、次いで、画像中の検出された搬送デバイスを示すアノテーションデータを、複数の仮想の搬送するデバイスに対応するさらなるアノテーションデータと比較することによって、決定され得る。たとえば、比較は、アノテーションデータを使用して和集合の共通部分(IoU:intersection over union)値を計算することを含む。最高IoU値に関連するさらなるアノテーションデータに対応するグリッド空間は、次いで、検出された搬送デバイスのグリッドロケーションとして選択され得る。
図15は、グリッド15を備える作業空間中の搬送デバイス上の識別マーカーを検出するコンピュータ実装方法150を示す。方法は、搬送デバイスを含む画像部分を表現する画像データを取得すること151を伴う。画像部分は、たとえば図7に示されているように、グリッドの上に位置するカメラ71によってキャプチャされた、たとえば図8Bに示されている、画像82の部分、たとえばその少なくとも一部であり得る。
作業空間中の除外ゾーンを決定するための方法およびシステムが、本明細書で提供される。除外ゾーンは、搬送デバイスのマスタコントローラによって実装され得、作業空間中で動作する搬送デバイスが除外ゾーンに入るのを禁止するように機能する。たとえば、除外ゾーンは、たとえば、倒れた、および/またはマスタコントローラとの通信を失った、欠陥のある搬送デバイスの周りで決定され得、したがって、欠陥のある搬送デバイスは、後で、注意を払われ、たとえば作業空間から取り出され得る。これは、他の搬送デバイスが欠陥のある搬送デバイスと衝突するリスクを低下させながら、作業空間が使用可能なままであることを可能にする。いくつかの場合には、決定された除外ゾーンは、実装の前に、たとえばオペレータに、提案され得、これは、決定された除外ゾーンが、作業空間中の欠陥のある搬送デバイスの実際の位置をカバーすることになることを保証するのを助けることができる。
以下に本願の出願当初の特許請求の範囲に記載された発明を付記する。
[C1]
作業空間中で動作する1つまたは複数の搬送デバイスの移動の制御を支援するためのコンピュータ実装方法であって、前記方法は、
1つまたは複数の画像センサーによってキャプチャされた前記作業空間の画像表現を取得することと、
インターフェースにおいて、前記作業空間の前記画像表現のターゲット画像部分を取得することと、
前記ターゲット画像部分を前記作業空間中のターゲットロケーションにマッピングすることと、
前記マッピングに基づいて、前記1つまたは複数の搬送デバイスが入るのを禁止されることになる、前記ターゲットロケーションを備える、前記作業空間中の除外ゾーンを決定することと、
前記作業空間中の前記除外ゾーンを実装するために、前記除外ゾーンを表現する除外ゾーンデータを、制御システムに出力することと
を備える、コンピュータ実装方法。
[C2]
前記ターゲット画像部分が、前記インターフェースを介して、前記作業空間の前記画像表現を閲覧するユーザによって選択される、C1に記載の方法。
[C3]
前記ターゲット画像部分が、前記作業空間中の欠陥のある搬送デバイスの少なくとも一部を備える、C2に記載の方法。
[C4]
前記作業空間がセルのグリッドを備え、前記1つまたは複数の搬送デバイスが、前記グリッド上の前記セル間で移動するように配置され、ここにおいて、前記ターゲット画像部分が、セルの前記グリッド中の所与のセルを備える、C1または2に記載の方法。
[C5]
前記ターゲット画像部分が、前記作業空間を表現する画像データに基づいて前記作業空間中の欠陥のある搬送デバイスを検出するように構成された物体検出システムから取得される、C1に記載の方法。
[C6]
前記ターゲット画像部分が、前記作業空間中の欠陥のある搬送デバイスの少なくとも一部を備える、C5に記載の方法。
[C7]
前記方法は、
前記物体検出システムにおいて、前記1つまたは複数の画像センサーによってキャプチャされた前記作業空間を表現する前記画像データを取得することと、
物体分類モデルを使用して、前記欠陥のある搬送デバイスが前記画像データ中に存在すると決定することと、
前記作業空間中で検出された前記欠陥のある搬送デバイスの少なくとも一部を備える前記ターゲット画像部分を出力することと
を備える、C6に記載の方法。
[C8]
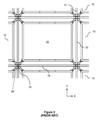
前記作業空間が、X方向に延在する平行なトラックの第1のセットと、実質的に水平な平面において前記第1のセットに直交する、Y方向に延在する平行なトラックの第2のセットとによって形成された、グリッドを備え、前記グリッドが、複数のグリッド空間を備え、
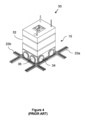
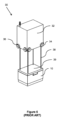
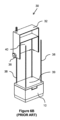
前記搬送デバイスが、前記トラック上で前記X方向または前記Y方向のうちの少なくとも1つにおいて選択的に移動することと、単一のグリッド空間のフットプリント内で前記トラックの下にスタックされたコンテナを取り扱うこととを行うように配置される、
C1から7のいずれかに記載の方法。
[C9]
前記1つまたは複数の搬送デバイスは、1つのグリッド空間を占有する所与の搬送デバイスが、隣接するグリッド空間を占有するかまたは横断する別の搬送デバイスを妨害しないように、各々、単一のグリッド空間のみを占有するフットプリントを有する、C8に記載の方法。
[C10]
前記除外ゾーンが、離散数のグリッド空間を備える、C8または9に記載の方法。
[C11]
前記1つまたは複数の搬送デバイスが前記除外ゾーンに入るのを禁止されるように、前記制御システムにおいて前記除外ゾーンを実装することを備える、C1から10のいずれかに記載の方法。
[C12]
前記マッピングが、前記作業空間の前記画像表現のひずみを逆にすることを備える、C1から11のいずれかに記載の方法。
[C13]
作業空間中の搬送デバイス移動を制御するための制御システムを支援するための支援システムであって、前記支援システムが、
前記作業空間の画像表現をキャプチャするための画像センサーと、
前記作業空間の前記画像表現のターゲット画像部分を取得するためのインターフェースと
を備え、
ここにおいて、前記支援システムは、
前記ターゲット画像部分を前記作業空間中のターゲットロケーションにマッピングすることと、
前記マッピングに基づいて、1つまたは複数の搬送デバイスが入るのを禁止される、前記ターゲットロケーションを備える、前記作業空間中の除外ゾーンを決定することと、
前記作業空間中の前記除外ゾーンを実装するために、前記除外ゾーンを表現する除外ゾーンデータを、前記制御システムに出力することと
を行うように構成された、支援システム。
[C14]
前記インターフェースは、前記作業空間の前記画像表現を閲覧するユーザが前記ターゲット画像部分を選択するためのものである、C13に記載の支援システム。
[C15]
前記作業空間を表現する画像データに基づいて前記作業空間中の欠陥のある搬送デバイスを検出するように構成された物体検出システムを備え、
ここにおいて、前記インターフェースが、前記物体検出システムから前記ターゲット画像部分を取得する、
C13または14に記載の支援システム。
[C16]
前記ターゲット画像部分が、前記作業空間中の欠陥のある搬送デバイスの少なくとも一部を備える、C15に記載の支援システム。
[C17]
前記物体検出システムは、
前記画像センサーによってキャプチャされた前記作業空間を表現する前記画像データを取得することと、
物体分類モデルを使用して、前記欠陥のある搬送デバイスが前記画像データ中に存在すると決定することと、
前記作業空間中で検出された前記欠陥のある搬送デバイスの少なくとも一部を備える前記ターゲット画像部分を出力することと
を行うように構成された、C15または16に記載の支援システム。
[C18]
作業空間と、
C13から17のいずれか一項に記載の支援システムと、
前記作業空間中の搬送デバイス移動を制御するための制御システムと
を備える、保管システムであって、
ここにおいて、前記作業空間が、X方向に延在する平行なトラックの第1のセットと、実質的に水平な平面において前記第1のセットに直交する、Y方向に延在する平行なトラックの第2のセットとによって形成された、グリッドを備え、前記グリッドが、複数のグリッド空間を備え、
ここにおいて、1つまたは複数の搬送デバイスが、前記トラック上で前記X方向または前記Y方向のうちの少なくとも1つにおいて選択的に移動することと、単一のグリッド空間のフットプリント内で前記トラックの下にスタックされたコンテナを取り扱うこととを行うように配置される、保管システム。
[C19]
前記1つまたは複数の搬送デバイスは、1つのグリッド空間を占有する所与の搬送デバイスが、隣接するグリッド空間を占有するかまたは横断する別の搬送デバイスを妨害しないように、各々、単一のグリッド空間のみを占有するフットプリントを有する、C18に記載の保管システム。
[C20]
除外ゾーンが、離散数のグリッド空間を備える、C18または19に記載の保管システム。
[C21]
前記制御システムは、前記支援システムから除外ゾーンデータを受信することと、前記1つまたは複数の搬送デバイスが前記除外ゾーンに入るのを禁止されるように、前記作業空間中の前記除外ゾーンを実装することとを行うように構成された、C18から20のいずれか一項に記載の保管システム。
Claims (21)
- 作業空間中で動作する1つまたは複数の搬送デバイスの移動の制御を支援するためのコンピュータ実装方法であって、前記方法は、
1つまたは複数の画像センサーによってキャプチャされた前記作業空間の画像表現を取得することと、
インターフェースにおいて、前記作業空間の前記画像表現のターゲット画像部分を取得することと、
前記ターゲット画像部分を前記作業空間中のターゲットロケーションにマッピングすることと、
前記マッピングに基づいて、前記1つまたは複数の搬送デバイスが入るのを禁止されることになる、前記ターゲットロケーションを備える、前記作業空間中の除外ゾーンを決定することと、
前記作業空間中の前記除外ゾーンを実装するために、前記除外ゾーンを表現する除外ゾーンデータを、制御システムに出力することと
を備える、コンピュータ実装方法。 - 前記ターゲット画像部分が、前記インターフェースを介して、前記作業空間の前記画像表現を閲覧するユーザによって選択される、請求項1に記載の方法。
- 前記ターゲット画像部分が、前記作業空間中の欠陥のある搬送デバイスの少なくとも一部を備える、請求項2に記載の方法。
- 前記作業空間がセルのグリッドを備え、前記1つまたは複数の搬送デバイスが、前記グリッド上の前記セル間で移動するように配置され、ここにおいて、前記ターゲット画像部分が、セルの前記グリッド中の所与のセルを備える、請求項1に記載の方法。
- 前記ターゲット画像部分が、前記作業空間を表現する画像データに基づいて前記作業空間中の欠陥のある搬送デバイスを検出するように構成された物体検出システムから取得される、請求項1に記載の方法。
- 前記ターゲット画像部分が、前記作業空間中の欠陥のある搬送デバイスの少なくとも一部を備える、請求項5に記載の方法。
- 前記方法は、
前記物体検出システムにおいて、前記1つまたは複数の画像センサーによってキャプチャされた前記作業空間を表現する前記画像データを取得することと、
物体分類モデルを使用して、前記欠陥のある搬送デバイスが前記画像データ中に存在すると決定することと、
前記作業空間中で検出された前記欠陥のある搬送デバイスの少なくとも一部を備える前記ターゲット画像部分を出力することと
を備える、請求項6に記載の方法。 - 前記作業空間が、X方向に延在する平行なトラックの第1のセットと、実質的に水平な平面において前記第1のセットに直交する、Y方向に延在する平行なトラックの第2のセットとによって形成された、グリッドを備え、前記グリッドが、複数のグリッド空間を備え、
前記搬送デバイスが、前記トラック上で前記X方向または前記Y方向のうちの少なくとも1つにおいて選択的に移動することと、単一のグリッド空間のフットプリント内で前記トラックの下にスタックされたコンテナを取り扱うこととを行うように配置される、
請求項1から7のいずれかに記載の方法。 - 前記1つまたは複数の搬送デバイスは、1つのグリッド空間を占有する所与の搬送デバイスが、隣接するグリッド空間を占有するかまたは横断する別の搬送デバイスを妨害しないように、各々、単一のグリッド空間のみを占有するフットプリントを有する、請求項8に記載の方法。
- 前記除外ゾーンが、離散数のグリッド空間を備える、請求項8に記載の方法。
- 前記1つまたは複数の搬送デバイスが前記除外ゾーンに入るのを禁止されるように、前記制御システムにおいて前記除外ゾーンを実装することを備える、請求項1から7のいずれかに記載の方法。
- 前記マッピングが、前記作業空間の前記画像表現のひずみを逆にすることを備える、請求項1から7のいずれかに記載の方法。
- 作業空間中の搬送デバイス移動を制御するための制御システムを支援するための支援システムであって、前記支援システムが、
前記作業空間の画像表現をキャプチャするための画像センサーと、
前記作業空間の前記画像表現のターゲット画像部分を取得するためのインターフェースと
を備え、
ここにおいて、前記支援システムは、
前記ターゲット画像部分を前記作業空間中のターゲットロケーションにマッピングすることと、
前記マッピングに基づいて、1つまたは複数の搬送デバイスが入るのを禁止される、前記ターゲットロケーションを備える、前記作業空間中の除外ゾーンを決定することと、
前記作業空間中の前記除外ゾーンを実装するために、前記除外ゾーンを表現する除外ゾーンデータを、前記制御システムに出力することと
を行うように構成された、支援システム。 - 前記インターフェースは、前記作業空間の前記画像表現を閲覧するユーザが前記ターゲット画像部分を選択するためのものである、請求項13に記載の支援システム。
- 前記作業空間を表現する画像データに基づいて前記作業空間中の欠陥のある搬送デバイスを検出するように構成された物体検出システムを備え、
ここにおいて、前記インターフェースが、前記物体検出システムから前記ターゲット画像部分を取得する、
請求項13に記載の支援システム。 - 前記ターゲット画像部分が、前記作業空間中の欠陥のある搬送デバイスの少なくとも一部を備える、請求項15に記載の支援システム。
- 前記物体検出システムは、
前記画像センサーによってキャプチャされた前記作業空間を表現する前記画像データを取得することと、
物体分類モデルを使用して、前記欠陥のある搬送デバイスが前記画像データ中に存在すると決定することと、
前記作業空間中で検出された前記欠陥のある搬送デバイスの少なくとも一部を備える前記ターゲット画像部分を出力することと
を行うように構成された、請求項15に記載の支援システム。 - 作業空間と、
請求項13から17のいずれか一項に記載の支援システムと、
前記作業空間中の搬送デバイス移動を制御するための制御システムと
を備える、保管システムであって、
ここにおいて、前記作業空間が、X方向に延在する平行なトラックの第1のセットと、実質的に水平な平面において前記第1のセットに直交する、Y方向に延在する平行なトラックの第2のセットとによって形成された、グリッドを備え、前記グリッドが、複数のグリッド空間を備え、
ここにおいて、1つまたは複数の搬送デバイスが、前記トラック上で前記X方向または前記Y方向のうちの少なくとも1つにおいて選択的に移動することと、単一のグリッド空間のフットプリント内で前記トラックの下にスタックされたコンテナを取り扱うこととを行うように配置される、保管システム。 - 前記1つまたは複数の搬送デバイスは、1つのグリッド空間を占有する所与の搬送デバイスが、隣接するグリッド空間を占有するかまたは横断する別の搬送デバイスを妨害しないように、各々、単一のグリッド空間のみを占有するフットプリントを有する、請求項18に記載の保管システム。
- 除外ゾーンが、離散数のグリッド空間を備える、請求項18に記載の保管システム。
- 前記制御システムは、前記支援システムから除外ゾーンデータを受信することと、前記1つまたは複数の搬送デバイスが前記除外ゾーンに入るのを禁止されるように、前記作業空間中の前記除外ゾーンを実装することとを行うように構成された、請求項18に記載の保管システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB2117095.6A GB202117095D0 (en) | 2021-11-26 | 2021-11-26 | Determining an exclusion zone in a workspace of transport devices |
| GB2117095.6 | 2021-11-26 | ||
| PCT/EP2022/083364 WO2023094634A1 (en) | 2021-11-26 | 2022-11-25 | Determining an exclusion zone in a workspace of transport devices |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024545611A JP2024545611A (ja) | 2024-12-10 |
| JP7686888B2 true JP7686888B2 (ja) | 2025-06-02 |
Family
ID=80038481
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024531347A Active JP7686888B2 (ja) | 2021-11-26 | 2022-11-25 | 搬送デバイスの作業空間中の除外ゾーンを決定すること |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20250026565A1 (ja) |
| EP (1) | EP4437470A1 (ja) |
| JP (1) | JP7686888B2 (ja) |
| KR (1) | KR20240116497A (ja) |
| CN (1) | CN118511186A (ja) |
| CA (1) | CA3239647A1 (ja) |
| GB (2) | GB202117095D0 (ja) |
| WO (1) | WO2023094634A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005328333A (ja) | 2004-05-14 | 2005-11-24 | Hitachi Kokusai Electric Inc | 監視システム |
| JP2017214197A (ja) | 2016-05-31 | 2017-12-07 | 株式会社リコー | 管理システム、管理方法および情報処理装置 |
| US20210093134A1 (en) | 2019-10-01 | 2021-04-01 | Lg Electronics Inc. | Robot cleaner and method for determining cleaning path |
| JP2021509653A (ja) | 2018-01-10 | 2021-04-01 | オカド・イノベーション・リミテッド | 搬送デバイスのためのコントローラ及び方法 |
| JP2022052494A (ja) | 2020-09-23 | 2022-04-04 | 株式会社東芝 | 動作制御装置及び動作制御システム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5979633A (en) | 1997-04-25 | 1999-11-09 | United Parcel Service Of America Inc. | Conveyor having high speed discharge capabilities |
| GB201314313D0 (en) | 2013-08-09 | 2013-09-25 | Ocado Ltd | Apparatus for retrieving units from a storage system |
| GB201409883D0 (en) | 2014-06-03 | 2014-07-16 | Ocado Ltd | Methods, systems, and apparatus for controlling movement of transporting devices |
| WO2017186825A1 (en) * | 2016-04-26 | 2017-11-02 | Ocado Innovation Limited | Robotic load handler coordination system, cell grid system and method of coordinating a robotic load handler |
| DE102018121335A1 (de) * | 2017-08-31 | 2019-02-28 | Neato Robotics, Inc. | Robotergestützte virtuelle grenzen |
| JP7340350B2 (ja) * | 2019-05-07 | 2023-09-07 | 東芝テック株式会社 | 情報処理装置及び情報処理方法 |
-
2021
- 2021-11-26 GB GBGB2117095.6A patent/GB202117095D0/en not_active Ceased
-
2022
- 2022-11-25 EP EP22822138.8A patent/EP4437470A1/en active Pending
- 2022-11-25 KR KR1020247021161A patent/KR20240116497A/ko active Pending
- 2022-11-25 CN CN202280088616.1A patent/CN118511186A/zh active Pending
- 2022-11-25 CA CA3239647A patent/CA3239647A1/en active Pending
- 2022-11-25 GB GB2217686.1A patent/GB2615172B/en active Active
- 2022-11-25 WO PCT/EP2022/083364 patent/WO2023094634A1/en not_active Ceased
- 2022-11-25 JP JP2024531347A patent/JP7686888B2/ja active Active
- 2022-11-25 US US18/713,098 patent/US20250026565A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005328333A (ja) | 2004-05-14 | 2005-11-24 | Hitachi Kokusai Electric Inc | 監視システム |
| JP2017214197A (ja) | 2016-05-31 | 2017-12-07 | 株式会社リコー | 管理システム、管理方法および情報処理装置 |
| JP2021509653A (ja) | 2018-01-10 | 2021-04-01 | オカド・イノベーション・リミテッド | 搬送デバイスのためのコントローラ及び方法 |
| US20210093134A1 (en) | 2019-10-01 | 2021-04-01 | Lg Electronics Inc. | Robot cleaner and method for determining cleaning path |
| JP2022052494A (ja) | 2020-09-23 | 2022-04-04 | 株式会社東芝 | 動作制御装置及び動作制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20240116497A (ko) | 2024-07-29 |
| GB2615172B (en) | 2025-03-12 |
| WO2023094634A1 (en) | 2023-06-01 |
| GB202217686D0 (en) | 2023-01-11 |
| CA3239647A1 (en) | 2023-06-01 |
| GB202117095D0 (en) | 2022-01-12 |
| AU2022397829A1 (en) | 2024-06-27 |
| JP2024545611A (ja) | 2024-12-10 |
| CN118511186A (zh) | 2024-08-16 |
| GB2615172A (en) | 2023-08-02 |
| US20250026565A1 (en) | 2025-01-23 |
| EP4437470A1 (en) | 2024-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7778929B2 (ja) | 作業空間中の搬送デバイスを検出すること | |
| JP2025538690A (ja) | ピッキングステーション上の識別マーカーを検出すること | |
| JP2025537984A (ja) | グリッド上で移動ピッキングステーションを検出すること | |
| JP7686888B2 (ja) | 搬送デバイスの作業空間中の除外ゾーンを決定すること | |
| JP7707445B2 (ja) | 画像ピクセルを保管システムにおけるグリッドポイントにマッピングするためにカメラを較正すること | |
| JP2025539479A (ja) | 保管システムのグリッド上のデブリを検出すること | |
| AU2022397829B2 (en) | Determining an exclusion zone in a workspace of transport devices | |
| GB2614438A (en) | Detecting an identification marker on a transport device in a workspace |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240717 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240717 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20250416 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250521 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7686888 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |