以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
1.第1実施形態
1-1.計測システムの構成
以下では、構造物が橋梁の上部構造であり、移動体が鉄道車両である場合を例に挙げ、本実施形態の計測方法を実現するための計測システムについて説明する。
図1は、本実施形態に係る計測システムの一例を示す図である。図1に示すように、本実施形態に係る計測システム10は、計測装置1と、橋梁5の上部構造7に設けられる少なくとも1つのセンサー2と、を備えている。また、計測システム10は、監視装置3を備えていてもよい。
橋梁5は上部構造7と下部構造8からなる。図2は、上部構造7を図1のA-A線で切断した断面図である。図1及び図2に示すように、上部構造7は、床板F、主桁G、不図示の横桁等からなる橋床7aと、支承7bと、レール7cと、枕木7dと、バラスト7eと、を含む。また、図1に示すように、下部構造8は、橋脚8aと、橋台8bと、を含む。上部構造7は、隣り合う橋台8bと橋脚8a、隣り合う2つの橋台8b、又は、隣り合う2つの橋脚8aのいずれか1つに渡された構造である。上部構造7の両端部は、隣り合う橋台8bと橋脚8aの位置、隣り合う2つの橋台8bの位置、又は、隣り合う2つの橋脚8aの位置にある。
計測装置1と各センサー2とは、例えば、不図示のケーブルで接続され、CAN等の通信ネットワークを介して通信を行う。CANは、Controller Area Networkの略である。あるいは、計測装置1と各センサー2とは、無線ネットワークを介して通信を行ってもよい。
例えば、各センサー2は、移動体である鉄道車両6の移動による上部構造7の変位を算出するためのデータを出力する。本実施形態では、各センサー2は加速度センサーであり、例えば、水晶加速度センサーであってもよいし、MEMS加速度センサーであってもよい。MEMSは、Micro Electro Mechanical Systemsの略である。
本実施形態では、各センサー2は上部構造7の長手方向の中央部、具体的には、主桁Gの長手方向の中央部に設置されている。ただし、各センサー2は、上部構造7の変位を算出するための加速度を検出することができればよく、その設置位置は上部構造7の中央部に限定されない。なお、各センサー2を上部構造7の床板Fに設けると、鉄道車両6の走行によって破壊するおそれがあり、また橋床7aの局部的な変形により測定精度が影響を受けるおそれがあるため、図1及び図2の例では、各センサー2は上部構造7の主桁Gに設けられている。
上部構造7の床板Fや主桁G等は、上部構造7を走行する鉄道車両6による荷重によって、垂直方向に撓む。各センサー2は、上部構造7を走行する鉄道車両6の荷重による床板Fや主桁Gの撓みの加速度を検出する。
計測装置1は、各センサー2から出力される加速度データに基づいて、鉄道車両6の走行による上部構造7の撓みの変位を算出する。計測装置1は、例えば、橋台8bに設置される。
計測装置1と監視装置3とは、例えば、携帯電話の無線ネットワーク及びインターネット等の通信ネットワーク4を介して、通信を行うことができる。計測装置1は、鉄道車両6の走行による上部構造7の変位の情報を監視装置3に送信する。監視装置3は、当該情報を不図示の記憶装置に記憶し、例えば、当該情報に基づいて鉄道車両6の監視や上部構造7の異常判定等の処理を行ってもよい。
なお、本実施形態では、橋梁5は、鉄道橋であり、例えば、鋼橋や桁橋、RC橋等である。RCは、Reinforced-Concreteの略である。
図2に示すように、本実施形態では、センサー2に対応付けて観測点Rが設定されている。図2の例では、観測点Rは、主桁Gに設けられたセンサー2の鉛直上方向にある上部構造7の表面の位置に設定されている。すなわち、センサー2は、観測点Rを観測する観測装置である。観測点Rを観測するセンサー2は、鉄道車両6の走行により観測点Rに生じる加速度を検出可能な位置に設けられていればよいが、観測点Rに近い位置に設けられることが望ましい。
なお、センサー2の数及び設置位置は、図1及び図2に示した例には限定されず種々の変形実施が可能である。
計測装置1は、センサー2から出力される加速度データに基づいて、鉄道車両6が移動する上部構造7の面と交差する方向の加速度を取得する。鉄道車両6が移動する上部構造7の面は、鉄道車両6が移動する方向、すなわち上部構造7の長手方向であるX方向と、鉄道車両6が移動する方向と直交する方向、すなわち上部構造7の幅方向であるY方向とによって規定される。鉄道車両6の走行によって、観測点Rは、X方向及びY方向と直交する方向に撓むので、計測装置1は、撓みの加速度の大きさを正確に算出するために、X方向及びY方向と直交する方向、すなわち、床板Fの法線方向であるZ方向の加速度を取得するのが望ましい。
図3は、センサー2が検出する加速度を説明する図である。センサー2は、互いに直交する3軸の各軸方向に生じる加速度を検出する加速度センサーである。
鉄道車両6の走行による観測点Rの撓みの加速度を検出するために、センサー2は、3つの検出軸であるx軸、y軸、z軸のうち、1軸がX方向及びY方向と交差する方向となるように設置される。図1及び図2では、センサー2は、1軸がX方向及びY方向と交差する方向となるように設置される。観測点Rは、X方向及びY方向と直交する方向に撓むので、撓みの加速度を正確に検出するために、理想的には、センサー2は、1軸をX方向及びY方向と直交するZ方向、すなわち、床板Fの法線方向に合わせて設置される。
ただし、センサー2を上部構造7に設置する場合、設置場所が傾いている場合もある。計測装置1は、センサー2の3つの検出軸の1軸が、床板Fの法線方向に合わせて設置されなくても、概ね法線方向に向いていることで誤差は小さく無視できる。また、計測装置1は、センサー2の3つの検出軸の1軸が、床板Fの法線方向に合わせて設置されなくても、x軸、y軸、z軸の加速度を合成した3軸合成加速度によって、センサー2の傾斜による検出誤差の補正を行うことができる。また、センサー2は、少なくとも鉛直方向にほぼ平行な方向に生ずる加速度、あるいは、床板Fの法線方向の加速度を検出する1軸加速度センサーであってもよい。
以下では、まず、計測装置1が実行する本実施形態の計測方法の基本的な考え方について説明した後、その詳細について説明する。
1-2.計測方法の基本的な考え方
まず、センサー2から出力される加速度データに基づいて得られる、処理対象である対象データをMd(k)とし、式(1)のように、対象データMd(k)は、振動成分を含む有意な信号M(k)とドリフトノイズe(k)を含んでいるものとする。対象データMd(k)に含まれるサンプル数をNとすると、kは0からN-1までの整数である。
ドリフトノイズe(k)は、主に、センサー2に入力された信号ではなく、0点誤差や、温度変化によるドリフト、感度の非線形によるドリフト等のセンサー2の内部で生成された誤差信号である。ドリフトノイズe(k)は、センサー2に入力される信号に比べて長周期の変動であり、低周波数域にエネルギー分布する。図4に、対象データMd(k)の周波数特性F{Md(k)}、信号M(k)の周波数特性F{M(k)}及びドリフトノイズe(k)の周波数特性F{e(k)}の関係を示す。
信号M(k)に含まれる振動成分は、例えば、橋梁5の固有振動によって生じる基本周波数の信号成分及びその高調波成分であり、一般にドリフトノイズe(k)よりも高い周波数域にエネルギー分布する。したがって、式(2)のように、対象データMd(k)をローパスフィルター処理することにより、振動成分が低減されたデータMs(k)が得られる。
振動成分を低減させるためのローパスフィルター処理は、周波数特性F{Md(k)}に基づいて算出される基本周波数に対応する周期で対象データMd(k)を移動平均する処理であってもよいし、基本周波数以上の周波数の信号成分を減衰させるFIRフィルター処理であってもよい。FIRは、Finite Impulse Responseの略である。図5に、対象データMd(k)を移動平均処理して得られたデータMs(k)の周波数特性F{Ms(k)}、信号M(k)の周波数特性F{M(k)}及びドリフトノイズe(k)の周波数特性F{e(k)}の関係を示す。
また、式(3)のように、対象データMd(k)からデータMs(k)を減算することにより、振動成分を含むデータMV(k)が得られる。図6に、振動成分を含むデータMV(k)の周波数特性F{MV(k)}を示す。
データMs(k)をハイパスフィルター処理したデータをfHP(Ms(k))とし、データMs(k)をローパスフィルター処理したデータをfLP(Ms(k))とすると、データMs(k)、データfHP(Ms(k))及びデータfLP(Ms(k))の関係は、式(4)のようになる。
また、データMs(k)の周波数特性F{Ms(k)}、データfHP(Ms(k))の周波数特性F{fHP(Ms(k))}及びデータfLP(Ms(k))の周波数特性F{fLP(Ms(k))}の関係は、式(5)のようになる。図7に、周波数特性F{Ms(k)},F{fHP(Ms(k))},F{fLP(Ms(k))}の関係を示す。
ドリフトノイズe(k)は、オフセット誤差のように観測されるので、ドリフトノイズe(k)を除くためには低周波数域の信号を減衰させるハイパスフィルター処理が有効である。データMs(k)をハイパスフィルター処理した時、低周波数域にエネルギー分布するドリフトノイズe(k)は十分に抑圧され、式(6)のように、ハイパスフィルター処理後のデータfHP(Ms(k))は、信号M(k)をハイパスフィルター処理したデータfHP(M(k))とほぼ等しくなると仮定する。
ハイパスフィルター処理によって信号M(k)の低周波数域の信号成分も失われるので、この信号成分を補うために、データMs(k)をハイパスフィルター処理したデータfHP(Ms(k))から、信号M(k)をローパスフィルター処理したデータfLP(M(k))を推定する。式(7)のように、信号M(k)をローパスフィルター処理したデータfLP(M(k))は、データMs(k)をハイパスフィルター処理したデータfHP(Ms(k))から、信号M(k)をローパスフィルター処理したデータfLP(M(k))を推定したデータALP(fHP(Ms(k)))とほぼ等しいと仮定する。
式(8)のように、データMs(k)からドリフトノイズe(k)を除いたデータは、データMs(k)をハイパスフィルター処理したデータfHP(Ms(k))と信号M(k)をローパスフィルター処理したデータfLP(M(k))の和と等しいと仮定すると、式(6)、式(7)及び式(8)より、式(9)が得られる。
式(9)より、データMs’(k)の周波数特性F{Ms’(k)}、データfHP(Ms(k))の周波数特性F{fHP(Ms(k))}及びデータALP(fHP(Ms(k)))の周波数特性F{ALP(fHP(Ms(k)))}の関係は、式(10)のようになる。図8に、周波数特性F{Ms’(k)},F{fHP(Ms(k))},F{ALP(fHP(Ms(k)))}の関係を示す。
式(11)のように、式(9)によって得られるデータMs’(k)と振動成分を含むデータMV(k)とを加算することにより、信号M(s)に近似するデータMd’(k)が得られる。図9に、周波数特性F{Md’(k)},F{Ms’(k)},F{MV(k)}の関係を示す。
データMs(k)をハイパスフィルター処理することによって、ドリフトノイズe(k)が低減されたデータfHP(Ms(k))が得られるので、このデータfHP(Ms(k))から、信号M(k)をローパスフィルター処理したデータfLP(M(k))を推定し、データfHP(Ms(k))と当該推定したデータと振動成分を含むデータMV(k)とを加算することで、ドリフトノイズe(k)が低減された信号M(k)を求めることができる。
以下では、データMs(k)が変位データである場合を例に挙げて、データMs(k)をハイパスフィルター処理したデータfHP(Ms(k))から、信号M(k)をローパスフィルター処理したデータfLP(M(k))を推定する手順について説明する。
まず、式(12)のように、データMs(k)として、橋梁5の上部構造7における鉄道車両6の通過時のたわみ変位を単純化した単位パルス波形を想定する。式(12)において、kは0以上の各整数である。図10に、式(12)で表される単位パルス波形であるデータMs(k)を示す。
データMs(k)、データMs(k)をハイパスフィルター処理したデータfHP(Ms(k))及びローパスフィルター処理したデータfLP(Ms(k))の関係は、式(13)のようになると仮定する。
例えば、ローパスフィルター処理が移動平均処理であるとすると、式(13)より、式(14)が得られる。この時、データkは移動平均の区間2p+1の中央に位置する。
式(14)において、pは1以上の整数であり、データMs(k)をローパスフィルター処理したデータfLP(Ms(k))に平坦部分を設けたいので、p<(ka-kb)/2とする。図11に、式(12)で表される単位パルス波形であるデータMs(k)を移動平均によるローパスフィルター処理したデータfLP(Ms(k))を示す。また、図12に、式(12)で表される単位パルス波形であるデータMs(k)をハイパスフィルター処理したデータfHP(Ms(k))を示す。
図11と図12を用いて、単位パルス波形であるデータMs(k)をハイパスフィルター処理したデータfHP(Ms(k))とローパスフィルター処理したデータfLP(Ms(k))とを比較する。
図11に示すように、データMs(k)をローパスフィルター処理したデータfLP(Ms(k))のka-pからka+pまでの区間の傾きbは、式(15)によって計算される。
また、データfLP(Ms(k))のkb-pからkb+pまでの区間の傾きは-bとなり、ka+pからkb-pまでの区間の振幅Bは-1となる。
一方、図12に示すように、データMs(k)をハイパスフィルター処理したデータfHP(Ms(k))のka-pからkaまでの区間の傾きaは、式(16)によって計算される。
また、データfHP(Ms(k))のkbからkb+pまでの区間の傾きは-aとなり、k=ka-1の振幅Aは、式(17)によって計算される。
前出の式(12)を式(17)に代入し、振幅Aは、式(18)のように計算される。
式(18)より、pが十分大きいとすると、振幅Aは1/2となる。
ここで、データMs(k)として想定した式(12)で示される単位パルス波形は、ドリフトノイズe(k)を含まない。そのため、データMs(k)をローパスフィルター処理したデータfLP(Ms(k))は、信号M(k)をローパスフィルター処理したデータfLP(M(k))と等しい。したがって、データfHP(Ms(k))とデータfLP(Ms(k))との比較は、データfHP(Ms(k))とデータfLP(M(k))との比較であり、データfHP(Ms(k))の傾きaと振幅Aを測定することで、信号M(k)をローパスフィルター処理したデータfLP(M(k))を推定することができる。
1-3.計測方法の詳細
実際には、橋梁5の上部構造7における鉄道車両6の通過時のたわみの変位データである対象データU(k)は、単位パルス波形とは異なる正方向又は負方向に凸の波形のデータを含むが、上記の対象データMd(k)を対象データU(k)に置き換え、上記の推定方法に基づいて、信号M(k)をローパスフィルター処理したデータfLP(M(k))を推定することができる。例えば、正方向又は負方向に凸の波形は、矩形波形、台形波形又は正弦半波波形である。
まず、計測装置1は、式(19)のように、加速度センサーから出力される加速度データAs(k)を積分して速度データVs(k)を生成し、さらに、式(20)のように、速度データVs(k)を積分して対象データU(k)を生成する。式(19)及び式(20)において、ΔTはデータの時間間隔である。図13に対象データU(k)の一例を示す。
次に、計測装置1は、対象データU(k)に含まれる基本周波数Ffの振動成分及びその高調波を低減させるために、対象データU(k)をローパスフィルター処理した変位データMs(k)を生成する。
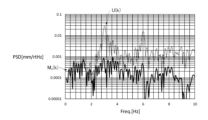
具体的には、まず、計測装置1は、対象データU(k)を高速フーリエ変換処理してパワースペクトラム密度を算出し、パワースペクトラム密度のピークを基本周波数Ffとして算出する。図14に、図13の対象データU(k)を高速フーリエ変換処理して得られたパワースペクトラム密度を示す。図14の例では、基本周波数Ffは約3Hzとして算出される。そして、計測装置1は、式(21)により、基本周波数Ffから基本周期Tfを算出し、式(22)のように、基本周期TfをΔTで除してデータの時間分解能に調整した移動平均区間kmfを算出する。基本周期Tfは、基本周波数Ffに対応する周期であり、Tf>2ΔTである。
そして、計測装置1は、ローパスフィルター処理として、式(23)により、基本周期Tfで対象データU(k)を移動平均処理して、信号M(k)に含まれる振動成分を低減させた振動成分低減データとして変位データMs(k)を生成する。この移動平均処理は、必要な計算量が小さいだけでなく、基本周波数Ffの信号成分及びその高調波成分の減衰量が非常に大きいので振動成分が効果的に低減された変位データMs(k)が得られる。図15に、変位データMs(k)の一例を示す。また、図16に、変位データMs(k)のパワースペクトラム密度を示す。図15及び図16に示すように、対象データU(k)に含まれる振動成分がほとんど除かれた変位データMs(k)が得られる。
なお、計測装置1は、ローパスフィルター処理として、対象データU(k)に対して基本周期Tf以上の周波数の信号成分を減衰させるFIRフィルター処理を行って変位データMs(k)を生成してもよい。FIRは、Finite Impulse Responseの略である。このFIRフィルター処理は、移動平均処理よりも計算量が大きいが、基本周波数Ff以上の周波数の信号成分をすべて減衰させることができる。
次に、計測装置1は、式(24)により、対象データU(k)から振動成分が低減された変位データMs(k)を減算して、振動成分を含む振動成分データUOSC(k)を生成する。図17に、振動成分データUOSC(k)の一例を示す。
また、計測装置1は、式(25)のように、ドリフトノイズを低減させるために変位データMs(k)をハイパスフィルター処理した変位データMU(k)を生成する。図18に、変位データMU(k)の一例を示す。
次に、計測装置1は、変位データMU(k)に基づいて、信号M(k)をローパスフィルター処理したデータfLP(M(k))、すなわち、変位データMs(k)からドリフトノイズを除いたデータと変位データMU(k)との差に相当する補正データMCC(k)を推定する。
図18に示すように、本実施形態では、計測装置1は、変位データMU(k)に基づいて、第1区間T1、第2区間T2及び第3区間T3を特定し、補正データMCC(k)をこれら3つの区間に分けて生成する。計測装置1は、第1区間T1、第2区間T2及び第3区間T3を特定するために、変位データMU(k)の第1ピークp1=(k1,mu1)及び第2ピークp2=(k2,mu2)を算出する。図18に示すように、第1ピークp1は、鉄道車両6が上部構造7に進入した時刻付近の先頭のピークであり、第2ピークp2は、鉄道車両6が上部構造7から進出した時刻付近の最後尾のピークである。第1区間T1は、第1ピークp1以前の区間、すなわちk≦k1の区間である。第2区間T2は、第1ピークp1と第2ピークp2との間の区間、すなわちk1<k<k2の区間である。第3区間T3は、第2ピークp2以降の区間、すなわちk2≦kの区間である。
式(26)のように、補正データMCC(k)は、第1区間T1の補正データである第1区間補正データMCC1(k)と、第2区間T2の補正データである第2区間補正データMCC2(k)と、第3区間T3の補正データである第3区間補正データMCC3(k)との和として求められる。
第1区間補正データMCC1(k)は、変位データMU(k)の符号を反転したデータMU’(k)を用いて、式(27)によって求められる。同様に、第3区間補正データMCC3(k)は、変位データMU(k)の符号を反転したデータMU’(k)を用いて、式(28)によって求められる。図19に、第1区間補正データMCC1(k)及び第3区間補正データMCC3(k)の一例を示す。
第2区間補正データMCC2(k)は以下のようにして求められる。まず、第2区間T2の所定の時刻以前であるk≦(k1+k2)/2の区間において、第1ピークp1以前の変位データMU(k)を第1ピークp1以降に逆順に並べ替えたデータは、MU(2k1-k)である。また、第2区間T2の所定の時刻以降である(k1+k2)/2≦kの区間において、第2ピークp2以降の変位データMU(k)を第2ピークp2以前に逆順に並べ替えたデータはMU(2k2-k)を生成する。ここでは、所定の時刻は、k=k1+k2に対応する時刻であるが、これ以外の時刻であってもよい。
そして、式(29)により、データMU(2k1-k)とデータMU(2k2-k)とを用いて、第2区間第1補正データM1CC2(k)が求められる。図20に、第2区間第1補正データM1CC2(k)の一例を示す。
第1ピークp1=(k1,mu1)と第2ピークp2=(k2,mu2)とを通る直線LC(k)は、式(30)によって求められる。図21に、直線LC(k)の一例を示す。
式(31)により、直線LC(k)に-2を乗算した直線データ-2LC(k)を用いて、第2区間第2補正データM2CC2(k)が求められる。図22に、第2区間第2補正データM2CC2(k)の一例を示す。
式(32)のように、第2区間補正データMCC2(k)は、第2区間第1補正データM1CC2(k)と第2区間第2補正データM2CC2(k)との和として求められる。図23に、第2区間補正データMCC2(k)の一例を示す。
補正データMCC(k)は、式(26)に、式(27)、式(28)及び式(32)を代入し、式(33)のように求められる。図24に、補正データMCC(k)の一例を示す。
そして、式(34)のように、変位データMU(k)と補正データMCC(k)とを加算して、振動成分及びドリフトノイズが低減された変位データRU(k)が得られる。
式(34)に、式(33)を代入し、式(35)が得られる。
式(35)は式(36)のように変形される。
式(36)より、変位データRU(k)は、第1区間T1であるk≦k1の区間及び第2区間T2であるk2≦kの区間において0であり、振動成分及びドリフトノイズが除かれた変位データRU(k)が得られる。図25に、変位データRU(k)の一例を示す。
そして、式(37)のように、変位データRU(k)と振動成分データUOSC(k)とを加算して、ドリフトノイズが低減された変位データである計測データU’(k)が得られる。図26に、計測データU’(k)の一例を示す。
式(37)に式(36)を代入し、式(38)が得られる。
本実施形態の計測方法によるドリフトノイズの除去効果を確認するために、対象データU(k)として、式(39)のように、変位波形UO(k)にドリフトノイズD(k)を加算した波形を用いる。図27に、変位波形UO(k)及びドリフトノイズD(k)の一例を示す。また、図28に、対象データU(k)の一例を示す。
対象データU(k)に対して、式(21)~式(38)によって得られる計測データU’(k)と変位波形UO(k)とを比較する。図29に、計測データU’(k)を示す。また、図30に、計測データU’(k)と変位波形UO(k)とを重ねて示す。図29及び図30に示すように、本実施形態の計測方法によって、ドリフトノイズが除去されて変位波形が復元された計測データU’(k)が得られることが確認できる。
1-4.計測方法の手順
図31は、橋梁5の上部構造7の変位を計測する第1実施形態の計測方法の手順の一例を示すフローチャート図である。本実施形態では、計測装置1が図31に示す手順を実行する。
図31に示すように、まず、対象データ生成工程S1において、計測装置1は、観測データである加速度データAs(k)を取得し、対象データU(k)を生成する。したがって、対象データU(k)は、観測装置であるセンサー2による観測データである加速度データAs(k)に基づくデータである。具体的には、計測装置1は、前出の式(19)及び式(20)の計算を行って対象データU(k)を生成する。本実施形態では、処理対象である対象データU(k)は、構造物である上部構造7を移動する移動体である鉄道車両6による上部構造7の変位のデータであり、鉄道車両6が移動する上部構造7の面と交差する方向の加速度を2回積分したデータである。したがって、対象データU(k)は、正方向又は負方向に凸の波形、具体的には、矩形波形、台形波形又は正弦半波波形のデータを含む。なお、矩形波形には、正確な矩形波形のみならず矩形波形に近似する波形も含まれる。同様に、台形波形には、正確な台形波形のみならず台形波形に近似する波形も含まれる。同様に、正弦半波波形には、正確な正弦半波波形のみならず正弦半波波形に近似する波形も含まれる。
次に、ローパスフィルター処理工程S2において、計測装置1は、工程S1で生成したドリフトノイズ及び振動成分を含む対象データU(k)をローパスフィルター処理して振動成分を低減させた振動成分低減データとしての変位データMs(k)を生成する。例えば、計測装置1は、対象データU(k)を高速フーリエ変換処理して基本周波数Ffを算出し、ローパスフィルター処理として、前出の式(23)のように、基本周波数Ffに対応する基本周期Tfで対象データU(k)を移動平均処理して変位データMs(k)を生成してもよい。また、例えば、計測装置1は、対象データU(k)を高速フーリエ変換処理して基本周波数Ffを算出し、ローパスフィルター処理として、対象データU(k)に対して基本周波数Ff以上の周波数の信号成分を減衰させるFIRフィルター処理を行って変位データMs(k)を生成してもよい。
次に、ハイパスフィルター処理工程S3において、計測装置1は、前出の式(25)のように、工程S2で生成したドリフトノイズを含む変位データMs(k)をハイパスフィルター処理してドリフトノイズを低減させたドリフトノイズ低減データとしての変位データMU(k)を生成する。変位データMs(k)のハイパスフィルター処理は、前出の式(14)のように、変位データMs(k)から、変位データMs(k)をローパスフィルター処理したデータを減算する処理であってもよい。ローパスフィルター処理は、移動平均処理又はFIRフィルター処理であってもよい。すなわち、変位データMs(k)のハイパスフィルター処理は、変位データMs(k)から、変位データMs(k)を移動平均処理又はFIRフィルター処理したデータを減算する処理であってもよい。
次に、補正データ推定工程S4において、計測装置1は、工程S3で生成した変位データMU(k)に基づいて、変位データMs(k)からドリフトノイズを除いたデータと変位データMU(k)との差に相当する補正データMCC(k)を推定する。具体的には、計測装置1は、前出の式(26)~式(33)の計算を行って補正データMCC(k)を生成する。
また、振動成分データ生成工程S5において、計測装置1は、前出の式(24)のように、工程S1で生成した対象データU(k)から工程S2で生成した変位データMs(k)を減算して振動成分を含む振動成分データUOSC(k)を生成する。本実施形態では、対象データU(k)に含まれるドリフトノイズの周波数は、上部構造7の固有振動周波数の最小値よりも低い。上部構造7の固有振動周波数の最小値は、例えば、上部構造7の長手方向の1次の振動モードの周波数である。工程S2におけるローパスフィルター処理のカットオフ周波数及び工程S3におけるハイパスフィルター処理のカットオフ周波数を、上部構造7のドリフトノイズの周波数よりも高く、かつ、固有振動周波数の最小値よりも低く設定することにより、工程S5で生成される振動成分データUOSC(k)において、上部構造7の固有振動周波数の信号成分及びその高調波成分は低減されることなく、ドリフトノイズは低減される。例えば、ドリフトノイズの周波数は1Hz未満であり、ローパスフィルター処理のカットオフ周波数及びハイパスフィルター処理のカットオフ周波数が1Hz以上であってもよい。
次に、計測データ生成工程S6において、計測装置1は、前出の式(34)及び式(37)のように、工程S3で生成した変位データMU(k)と工程S4で生成した補正データMCC(k)と工程S5で生成した振動成分データUOSC(k)とを加算して計測データU’(k)を生成する。
次に、計測データ出力工程S7において、計測装置1は、工程S6で生成した計測データU’(k)を監視装置3に出力する。具体的には、計測装置1は、計測データU’(k)を、通信ネットワーク4を介して監視装置3に送信する。
そして、工程S8において、橋梁5の上部構造7の変位の計測を終了するまで、計測装置1は、工程S1~S7の処理を繰り返し行う。
図32は、図31の補正データ推定工程S4の手順の一例を示すフローチャート図である。
図32に示すように、まず、区間特定工程S41において、計測装置1は、変位データMU(k)の第1ピークp1=(k1,mu1)及び第2ピークp2=(k2,mu2)を算出し、第1ピークp1以前の第1区間T1と、第1ピークp1と第2ピークp2との間の第2区間T2と、第2ピークp2以降の第3区間T3と、を特定する。すなわち、第1区間T1はk≦k1の区間であり、第2区間T2はk1<k<k2の区間であり、第3区間T3はk2≦kの区間である。本実施形態では、第1ピークp1は、鉄道車両6が上部構造7に進入した時刻付近の先頭のピークであり、第2ピークp2は、鉄道車両6が上部構造7から進出した時刻付近の最後尾のピークである。
次に、第1区間補正データ生成工程S42において、計測装置1は、前出の式(27)のように、第1区間T1において、変位データMU(k)の符号を反転して第1区間補正データMCC1(k)を生成する。
次に、第2区間補正データ生成工程S43において、計測装置1は、前出の式(32)のように、第2区間T2の所定の時刻以前において、第1ピークp1以前の変位データMU(k)を第1ピークp1以降に逆順に並べ替えたデータMU(2k1-k)と、第1ピークp1と第2ピークp2とを通る直線LC(k)に-2を乗算した直線データ-2LC(k)を加算し、第2区間T2の所定の時刻以降において、第2ピークp2以降の変位データMU(k)を第2ピークp2以前に逆順に並べ替えたデータMU(2k2-k)と、直線データ-2LC(k)とを加算して、第2区間補正データMCC2(k)を生成する。
次に、第3区間補正データ生成工程S44において、計測装置1は、前出の式(28)のように、第3区間T3において、変位データMU(k)の符号を反転して第3区間補正データMCC3(k)を生成する。
最後に、補正データ生成工程S45において、計測装置1は、前出の式(26)のように、工程S42で生成した第1区間補正データMCC1(k)と工程S43で生成した第2区間補正データMCC2(k)と工程S44で生成した第3区間補正データMCC3(k)とを加算して補正データMCC(k)を生成する。
1-5.観測装置、計測装置及び監視装置の構成
図33は、観測装置であるセンサー2、計測装置1及び監視装置3の構成例を示す図である。
図33に示すように、センサー2は、通信部21と、加速度センサー22と、プロセッサー23と、記憶部24と、を備えている。
記憶部24は、プロセッサー23が計算処理や制御処理を行うための各種のプログラムやデータ等を記憶するメモリーである。また、記憶部24は、プロセッサー23が所定のアプリケーション機能を実現するためのプログラムやデータ等を記憶している。
加速度センサー22は、3軸の各軸方向に生じる加速度を検出する。
プロセッサー23は、記憶部24に記憶された観測プログラム241を実行することにより、加速度センサー22を制御し、加速度センサー22が検出した加速度に基づいて観測データ242を生成し、生成した観測データ242を記憶部24に記憶させる。本実施形態では、観測データ242は、加速度データAs(k)である。
通信部21は、プロセッサー23の制御により、記憶部24に記憶されている観測データ242を計測装置1に送信する。
図33に示すように、計測装置1は、第1通信部11と、第2通信部12と、プロセッサー13と、記憶部14と、を備えている。
第1通信部11は、センサー2から観測データ242を受信し、受信した観測データ242をプロセッサー13に出力する。前述の通り、観測データ242は、加速度データAs(k)である。
記憶部14は、プロセッサー13が計算処理や制御処理を行うためのプログラムやデータ等を記憶するメモリーである。また、記憶部14は、プロセッサー13が所定のアプリケーション機能を実現するための各種のプログラムやデータ等を記憶している。また、プロセッサー13が通信ネットワーク4を介して各種のプログラムやデータ等を受信して記憶部14に記憶させてもよい。
プロセッサー13は、第1通信部11が受信した観測データ242を取得し、観測データ142として記憶部14に記憶させる。そして、プロセッサー13は、記憶部14に記憶された観測データ142に基づいて計測データ143を生成し、生成した計測データ143を記憶部14に記憶させる。本実施形態では、計測データ143は、計測データU’(k)である。
本実施形態では、プロセッサー13は、記憶部14に記憶された計測プログラム141を実行することにより、対象データ生成部131、ローパスフィルター処理部132、ハイパスフィルター処理部133、補正データ推定部134、振動成分データ生成部135、計測データ生成部136及び計測データ出力部137として機能する。すなわち、プロセッサー13は、対象データ生成部131、ローパスフィルター処理部132、ハイパスフィルター処理部133、補正データ推定部134、振動成分データ生成部135、計測データ生成部136及び計測データ出力部137を含む。
対象データ生成部131は、記憶部14に記憶されている観測データ142を読み出し、観測データ142である加速度データAs(k)に基づいて、対象データU(k)を生成する。具体的には、対象データ生成部131は、前出の式(19)及び式(20)の計算を行って対象データU(k)を生成する。すなわち、対象データ生成部131は、図31における対象データ生成工程S1の処理を行う。
ローパスフィルター処理部132は、対象データ生成部131が生成したドリフトノイズ及び振動成分を含む対象データU(k)をローパスフィルター処理して振動成分を低減させた振動成分低減データとしての変位データMs(k)を生成する。すなわち、ローパスフィルター処理部132は、図31におけるローパスフィルター処理工程S2の処理を行う。
ハイパスフィルター処理部133は、前出の式(25)のように、ローパスフィルター処理部132が生成した変位データMs(k)をハイパスフィルター処理してドリフトノイズを低減させたドリフトノイズ低減データとしての変位データMU(k)を生成する。すなわち、ハイパスフィルター処理部133は、図31におけるハイパスフィルター処理工程S3の処理を行う。
補正データ推定部134は、ハイパスフィルター処理部133が生成した変位データMU(k)に基づいて、変位データMs(k)からドリフトノイズを除いたデータと変位データMU(k)との差に相当する補正データMCC(k)を生成する。補正データ推定部134は、前出の式(26)~式(33)の計算を行って補正データMCC(k)を生成する。
具体的には、まず、補正データ推定部134は、変位データMU(k)の第1ピークp1=(k1,mu1)及び第2ピークp2=(k2,mu2)を算出し、第1ピークp1以前の第1区間T1と、第1ピークp1と第2ピークp2との間の第2区間T2と、第2ピークp2以降の第3区間T3と、を特定する。すなわち、補正データ推定部134は、図32における区間特定工程S41の処理を行う。
次に、補正データ推定部134は、前出の式(27)のように、第1区間T1において、変位データMU(k)の符号を反転して第1区間補正データMCC1(k)を生成する。すなわち、補正データ推定部134は、図32における第1区間補正データ生成工程S42の処理を行う。
次に、補正データ推定部134は、前出の式(32)のように、第2区間T2の所定の時刻以前において、第1ピークp1以前の変位データMU(k)を第1ピークp1以降に逆順に並べ替えたデータMU(2k1-k)と、第1ピークp1と第2ピークp2とを通る直線LC(k)に-2を乗算した直線データ-2LC(k)を加算し、第2区間T2の所定の時刻以降において、第2ピークp2以降の変位データMU(k)を第2ピークp2以前に逆順に並べ替えたデータMU(2k2-k)と、直線データ-2LC(k)とを加算して、第2区間補正データMCC2(k)を生成する。すなわち、補正データ推定部134は、図32における第2区間補正データ生成工程S43の処理を行う。
次に、補正データ推定部134は、前出の式(28)のように、第3区間T3において、変位データMU(k)の符号を反転して第3区間補正データMCC3(k)を生成する。すなわち、補正データ推定部134は、図32における第3区間補正データ生成工程S44の処理を行う。
最後に、補正データ推定部134は、前出の式(26)のように、第1区間補正データMCC1(k)と第2区間補正データMCC2(k)と第3区間補正データMCC3(k)とを加算して補正データMCC(k)を生成する。すなわち、補正データ推定部134は、図32における補正データ生成工程S45の処理を行う。
このように、補正データ推定部134は、図31における補正データ推定工程S4の処理、具体的には、図32における工程S41~S45の処理を行う。
振動成分データ生成部135は、前出の式(24)のように、対象データ生成部131が生成した対象データU(k)からローパスフィルター処理部132が生成した変位データMs(k)を減算して振動成分を含む振動成分データUOSC(k)を生成する。すなわち、振動成分データ生成部135は、図31における振動成分データ生成工程S5の処理を行う。
計測データ生成部136は、前出の式(34)及び式(37)のように、ハイパスフィルター処理部133が生成した変位データMU(k)と補正データ推定部134が生成した補正データMCC(k)と振動成分データ生成部135が生成した振動成分データUOSC(k)とを加算して計測データU’(k)を生成する。すなわち、計測データ生成部136は、図31における計測データ生成工程S6の処理を行う。計測データ生成部136が生成した計測データU’は、計測データ143として記憶部14に記憶される。
計測データ出力部137は、記憶部14に記憶されている計測データ143を読み出し、計測データ143を監視装置3に出力する。そして、第2通信部12は、計測データ出力部137の制御により、記憶部14に記憶されている計測データ143を、通信ネットワーク4を介して、監視装置3に送信する。すなわち、計測データ出力部137は、図31における計測データ出力工程S7の処理を行う。
このように、計測プログラム141は、図31に示したフローチャートの各手順を、コンピューターである計測装置1に実行させるプログラムである。
図33に示すように、監視装置3は、通信部31と、プロセッサー32と、表示部33と、操作部34と、記憶部35と、を備えている。
通信部31は、計測装置1から計測データ143を受信し、受信した計測データ143をプロセッサー32に出力する。前述の通り、計測データ143は、計測データU’(k)である。
表示部33は、プロセッサー32の制御により、各種の情報を表示させる。表示部33は、例えば、液晶ディスプレイや有機ELディスプレイであってもよい。ELは、Electro Luminescenceの略である。
操作部34は、ユーザーによる操作に対応する操作データをプロセッサー32に出力する。操作部34は、例えば、マウス、キーボード、マイクロフォン等の入力装置であってもよい。
記憶部35は、プロセッサー32が計算処理や制御処理を行うための各種のプログラムやデータ等を記憶するメモリーである。また、記憶部35は、プロセッサー32が所定のアプリケーション機能を実現するためのプログラムやデータ等を記憶している。
プロセッサー32は、通信部31が受信した計測データ143を取得し、取得した計測データ143に基づいて上部構造7の変位の経時的な変化を評価して評価情報を生成し、生成した評価情報を表示部33に表示させる。
本実施形態では、プロセッサー32は、記憶部35に記憶された監視プログラム351を実行することにより、計測データ取得部321及び監視部322として機能する。すなわち、プロセッサー32は、計測データ取得部321及び監視部322を含む。
計測データ取得部321は、通信部31が受信した計測データ143を取得し、取得した計測データ143を記憶部35に記憶される計測データ列352に追加する。
監視部322は、記憶部35に記憶される計測データ列352に基づいて、統計的に上部構造7の変位の経時的な変化を評価する。そして、監視部322は、評価結果を示す評価情報を生成し、生成した評価情報を表示部33に表示させる。ユーザーは、表示部33に表示される評価情報に基づいて、上部構造7の状態を監視することができる。
監視部322は、記憶部35に記憶される計測データ列352に基づいて、鉄道車両6の監視や上部構造7の異常判定等の処理を行ってもよい。
また、プロセッサー32は、操作部34から出力される操作データに基づいて、計測装置1やセンサー2の動作状況を調整するための情報を、通信部31を介して計測装置1に送信する。計測装置1は、第2通信部12を介して受信した情報によって動作状況が調整される。また、計測装置1は、第2通信部12を介して受信したセンサー2の動作状況を調整するための情報を、第1通信部11を介してセンサー2に送信する。センサー2は、通信部21を介して受信した情報によって動作状況が調整される。
なお、プロセッサー13,23,32は、例えば各部の機能が個別のハードウェアで実現されてもよいし、或いは各部の機能が一体のハードウェアで実現されてもよい。例えば、プロセッサー13,23,32はハードウェアを含み、そのハードウェアは、デジタル信号を処理する回路及びアナログ信号を処理する回路の少なくとも一方を含むことができる。プロセッサー13,23,32は、CPU、GPU、或いはDSP等であってもよい。CPUはCentral Processing Unitの略であり、GPUはGraphics Processing Unitの略であり、DSPはDigital Signal Processorの略である。また、プロセッサー13,23,32は、ASICなどのカスタムICとして構成され、各部の機能を実現してもよいし、CPUとASICとによって各部の機能を実現してもよい。ASICはApplication Specific Integrated Circuitの略であり、ICはIntegrated Circuitの略である。
また、記憶部14,24,35は、例えば、ROMやフラッシュROM、RAM等の各種ICメモリーやハードディスク、メモリーカードなどの記録媒体等により構成される。ROMはRead Only Memoryの略であり、RAMはRandom Access Memoryの略であり、ICはIntegrated Circuitの略である。記憶部14,24,35は、コンピューターにより読み取り可能な装置や媒体である不揮発性の情報記憶装置を含み、各種のプログラムやデータ等は当該情報記憶装置に記憶されていてもよい。情報記憶装置は、光ディスクDVD、CD等の光ディスク、ハードディスクドライブ、或いはカード型メモリーやROM等の各種のメモリー等であってもよい。
なお、図33ではセンサー2は1つのみ図示されているが、複数のセンサー2がそれぞれ観測データ242を生成し、計測装置1に送信してもよい。この場合、計測装置1は、複数のセンサー2から送信された複数の観測データ242を受信して複数の計測データ143を生成し、監視装置3に送信する。また、監視装置3は、計測装置1から送信された複数の計測データ143を受信し、受信した複数の計測データ143に基づいて、複数の上部構造7の状態を監視する。
1-6.作用効果
以上に説明した第1実施形態の計測方法では、計測装置1は、処理対象である対象データU(k)を用いて、振動成分を低減させた変位データMs(k)及び振動成分を含む振動成分データUOSC(k)を生成し、変位データMs(k)からドリフトノイズを低減させた変位データMU(k)を生成し、変位データMU(k)に基づいて補正データMCC(k)を推定する。変位データMU(k)は振動成分が低減されているので、高い精度で推定された補正データMCC(k)が得られる。そして、補正データMCC(k)は、変位データMs(k)からドリフトノイズを除いたデータと変位データMU(k)との差に相当するので、ハイパスフィルター処理によって除去された有意な信号成分を含んでいる。したがって、第1実施形態の計測方法によれば、計測装置1は、変位データMU(k)と補正データMCC(k)と振動成分データUOSC(k)とを加算することにより、対象データU(k)に対してドリフトノイズが低減された計測データU’(k)を生成することができる。また、第1実施形態の計測方法によれば、計測装置1は、処理対象である対象データU(k)を用いて、変位データMU(k)と補正データMCC(k)と振動成分データUOSC(k)とを生成し、変位データMU(k)と補正データMCC(k)と振動成分データUOSC(k)とを加算することにより、ドリフトノイズを低減させるための情報をあらかじめ用意しなくともドリフトノイズを低減させた計測データU’(k)を生成することができる。そのため、第1実施形態の計測方法を用いることによって、環境の変化によらず精度の良い計測データU’(k)が得られるとともに、低コスト化が可能である。
特に、第1実施形態の計測方法によれば、計測装置1は、対象データU(k)に対してドリフトノイズ及び振動成分を低減させた変位データMU(k)の特徴に基づいて第1区間T1、第2区間T2及び第3区間T3を特定し、適切な第1区間補正データMCC1(k)、第2区間補正データMCC2(k)及び第3区間補正データMCC3(k)を生成することができるので、これらを加算して生成される補正データMCC(k)の推定精度を高めることができる。
また、第1実施形態の計測方法によれば、計測装置1は、基本周波数Ffに対応する周期Tfで対象データU(k)を移動平均処理することにより、必要な計算量が小さいだけでなく、基本周波数Ffの信号成分及びその高調波成分の減衰量が非常に大きいので、振動成分が効果的に低減された変位データMs(k)が得られるため、振動成分の影響を排除して補正データMCC(k)の推定精度を高めることができる。あるいは、計測装置1は、対象データU(k)に対して基本周波数Ff以上の周波数の信号成分を減衰させるFIRフィルター処理を行って変位データMs(k)を生成することにより、移動平均処理よりも計算量が大きくなるが、基本周波数Ff以上の周波数の信号成分をすべて減衰させることができるため、基本周波数Ff以上の振動成分の影響を排除して補正データMCC(k)の推定精度を高めることができる。
また、第1実施形態の計測方法によれば、計測装置1は、変位データMs(k)に対するハイパスフィルター処理として、変位データMs(k)から、変位データMs(k)を移動平均処理又はFIRフィルター処理したデータを減算する処理を行うことにより、ハイパスフィルター処理を簡易に行うことができる。さらに、移動平均処理又はFIRフィルター処理では変位データMs(k)に含まれる各信号成分の群遅延が一定であるので、補正データMCC(k)を精度良く推定することができる。
また、第1実施形態の計測方法では、処理対象である対象データU(k)は、橋梁5の上部構造7を移動する鉄道車両6による上部構造7の変位のデータである。したがって、第1実施形態の計測方法によれば、計測装置1は、ドリフトノイズが低減された、鉄道車両6の移動による上部構造7の変位データである計測データU’(k)を生成するので、橋梁5の上部構造7の変位を精度良く計測することができる。
また、第1実施形態の計測方法によれば、計測装置1は、上部構造7に設置されたセンサー2が検出する上部構造7の面と交差する方向の加速度を2回積分して処理対象である対象データU(k)を生成するので、上部構造7の変位を精度良く計測することができる。
また、第1実施形態の計測方法では、対象データU(k)に含まれるドリフトノイズの周波数が、上部構造7の固有振動周波数の最小値よりも低いことにより、対象データU(k)に対するローパスフィルター処理及びハイパスフィルター処理のカットオフ周波数を、上部構造7のドリフトノイズの周波数よりも高く、かつ、固有振動周波数の最小値よりも低く設定することができる。したがって、第1実施形態の計測方法によれば、生成される計測データU’(k)において、上部構造7の固有振動周波数の信号成分及びその高調波成分を低減させずに、ドリフトノイズを低減させることができる。
また、第1実施形態の計測方法では、処理対象である対象データU(k)が正方向又は負方向に凸の波形、例えば、矩形波形、台形波形又は正弦半波波形のデータを含むことにより、計測装置1は、これらの波形の特徴に基づいてより適切な補正データMCC(k)を生成することができるので、生成される補正データMCC(k)の推定精度を高めることができる。
2.第2実施形態
以下、第2実施形態について、第1実施形態と同様の構成要素には同じ符号を付して第1実施形態と重複する説明を省略又は簡略し、主に第1実施形態と異なる内容について説明する。
第1実施形態の計測方法では、計測装置1は、第1区間補正データMCC1(k)と第2区間補正データMCC2(k)と第3区間補正データMCC3(k)とを加算して補正データMCC(k)を生成し、変位データMU(k)と補正データMCC(k)と振動成分データUOSC(k)とを加算して計測データU’(k)を生成する。これに対して、前出の式(38)のように、変位データMU(k)と補正データMCC(k)と振動成分データUOSC(k)との加算により得られる計測データU’(k)は、第1区間T1及び第3区間T3において必ず振動成分データUOSC(k)になる。そのため、第2実施形態の計測方法では、計測装置1は、第1区間補正データMCC1(k)及び第3区間補正データMCC3(k)を生成せずに、第2区間T2において補正データMCC2(k)を生成する。そして、計測装置1は、式(40)に示すように、第1区間T1であるk≦k1の区間及び第3区間T3であるk2≦kの区間において振動成分データUOSC(k)とし、第2区間T2であるk1<k<k2の区間において変位データMU(k)と補正データMCC2(k)と振動成分データUOSC(k)とを加算して、計測データU’(k)を生成する。
前出の式(38)において、k1<k<k2の区間では補正データMCC(k)は第2区間補正データMCC2(k)と一致するので、式(40)による計算結果は、式(38)による計算結果と一致する。
図34は、橋梁5の上部構造7の変位を計測する第2実施形態の計測方法の手順の一例を示すフローチャート図である。本実施形態では、計測装置1が図34に示す手順を実行する。
図34に示すように、まず、対象データ生成工程S110において、計測装置1は、観測データである加速度データAs(k)を取得し、対象データU(k)を生成する。具体的には、計測装置1は、前出の式(19)及び式(20)の計算を行って対象データU(k)を生成する。対象データ生成工程S110の処理は、図31の対象データ生成工程S1の処理と同じである。
次に、ローパスフィルター処理工程S120において、計測装置1は、工程S110で生成したドリフトノイズ及び振動成分を含む対象データU(k)をローパスフィルター処理して振動成分を低減させた振動成分低減データとしての変位データMs(k)を生成する。ローパスフィルター処理工程S120の処理は、図31のローパスフィルター処理工程S2の処理と同じである。
次に、ハイパスフィルター処理工程S130において、計測装置1は、前出の式(25)のように、工程S120で生成したドリフトノイズを含む変位データMs(k)をハイパスフィルター処理してドリフトノイズを低減させたドリフトノイズ低減データとしての変位データMU(k)を生成する。ハイパスフィルター処理工程S130の処理は、図31のハイパスフィルター処理工程S3の処理と同じである。
次に、区間特定工程S140において、計測装置1は、工程S130で生成した変位データMU(k)の第1ピークp1=(k1,mu1)及び第2ピークp2=(k2,mu2)を算出し、第1ピークp1以前の第1区間T1と、第1ピークp1と第2ピークp2との間の第2区間T2と、第2ピークp2以降の第3区間T3と、を特定する。すなわち、第1区間T1はk≦k1の区間であり、第2区間T2はk1<k<k2の区間であり、第3区間T3はk2≦kの区間である。区間特定工程S140の処理は、図32の区間特定工程S41の処理と同じである。
次に、補正データ推定工程S150において、計測装置1は、工程S130で生成した変位データMU(k)に基づいて、第2区間T2において、変位データMs(k)からドリフトノイズを除いたデータと変位データMU(k)との差に相当する補正データMCC2(k)を生成する。具体的には、計測装置1は、前出の式(29)~式(32)の計算を行って補正データMCC2(k)を生成する。
また、振動成分データ生成工程S160において、計測装置1は、前出の式(24)のように、工程S110で生成した対象データU(k)から工程S120で生成した変位データMs(k)を減算して振動成分を含む振動成分データUOSC(k)を生成する。振動成分データ生成工程S160の処理は、図31の振動成分データ生成工程S5の処理と同じである。
次に、計測データ生成工程S170において、計測装置1は、前出の式(40)のように、第1区間T1を工程S160で生成した振動成分データUOSC(k)とし、第2区間T2において、工程S130で生成した変位データMU(k)と工程S150で生成した補正データMCC2(k)と振動成分データUOSC(k)とを加算し、第3区間T3を振動成分データUOSC(k)として、計測データU’(k)を生成する。
次に、計測データ出力工程S180において、計測装置1は、工程S170で生成した計測データU’(k)を監視装置3に出力する。具体的には、計測装置1は、計測データU’(k)を、通信ネットワーク4を介して監視装置3に送信する。計測データ出力工程S180の処理は、図31の計測データ出力工程S7の処理と同じである。
そして、工程S190において、橋梁5の上部構造7の変位の計測を終了するまで、計測装置1は、工程S110~S180の処理を繰り返し行う。
図35は、図34の補正データ推定工程S150の手順の一例を示すフローチャート図である。
図35に示すように、工程S151において、計測装置1は、前出の式(32)のように、第2区間T2の所定の時刻以前において、第1ピークp1以前の変位データMU(k)を第1ピークp1以降に逆順に並べ替えたデータMU(2k1-k)と、第1ピークp1と第2ピークp2とを通る直線LC(k)に-2を乗算した直線データ-2LC(k)を加算し、第2区間T2の所定の時刻以降において、第2ピークp2以降の変位データMU(k)を第2ピークp2以前に逆順に並べ替えたデータMU(2k2-k)と、直線データ-2LC(k)とを加算して、補正データMCC2(k)を生成する。
図36は、第2実施形態における計測装置1の構成例を示す図である。図36に示すように、第2実施形態における計測装置1は、第1実施形態と同様、第1通信部11と、第2通信部12と、プロセッサー13と、記憶部14と、を備えている。第1通信部11、第2通信部12及び記憶部14の機能は、第1実施形態と同様であるため、その説明を省略する。
本実施形態では、プロセッサー13は、記憶部14に記憶された計測プログラム141を実行することにより、対象データ生成部131、ローパスフィルター処理部132、ハイパスフィルター処理部133、補正データ推定部134、振動成分データ生成部135、計測データ生成部136、計測データ出力部137及び区間特定部138として機能する。すなわち、プロセッサー13は、対象データ生成部131、ローパスフィルター処理部132、ハイパスフィルター処理部133、補正データ推定部134、振動成分データ生成部135、計測データ生成部136、計測データ出力部137及び区間特定部138を含む。
対象データ生成部131、ローパスフィルター処理部132、ハイパスフィルター処理部133、振動成分データ生成部135及び計測データ出力部137の機能は、第1実施形態と同様であるため、その説明を省略する。なお、対象データ生成部131は、図34における対象データ生成工程S110の処理を行う。また、ローパスフィルター処理部132は、図34におけるローパスフィルター処理工程S120の処理を行う。また、ハイパスフィルター処理部133は、図34におけるハイパスフィルター処理工程S130の処理を行う。また、振動成分データ生成部135は、図34における振動成分データ生成工程S160の処理を行う。また、計測データ出力部137は、図34における計測データ出力工程S180の処理を行う。
区間特定部138は、ハイパスフィルター処理部133が生成した変位データMU(k)の第1ピークp1=(k1,mu1)及び第2ピークp2=(k2,mu2)を算出し、第1ピークp1以前の第1区間T1と、第1ピークp1と第2ピークp2との間の第2区間T2と、第2ピークp2以降の第3区間T3と、を特定する。すなわち、区間特定部138は、図34における区間特定工程S140の処理を行う。
補正データ推定部134は、ハイパスフィルター処理部133が生成した変位データMU(k)に基づいて、第2区間T2において、変位データMs(k)からドリフトノイズを除いたデータと変位データMU(k)との差に相当する補正データMCC2(k)を生成する。補正データ推定部134は、前出の式(29)~式(32)の計算を行って補正データMCC2(k)を生成する。具体的には、補正データ推定部134は、前出の式(32)のように、第2区間T2の所定の時刻以前において、第1ピークp1以前の変位データMU(k)を第1ピークp1以降に逆順に並べ替えたデータMU(2k1-k)と、第1ピークp1と第2ピークp2とを通る直線LC(k)に-2を乗算した直線データ-2LC(k)を加算し、第2区間T2の所定の時刻以降において、第2ピークp2以降の変位データMU(k)を第2ピークp2以前に逆順に並べ替えたデータMU(2k2-k)と、直線データ-2LC(k)とを加算して、補正データMCC2(k)を生成する。
このように、補正データ推定部134は、図34における補正データ推定工程S150の処理、具体的には、図35における工程S151の処理を行う。
計測データ生成部136は、前出の式(40)のように、第1区間T1を振動成分データ生成部135が生成した振動成分データUOSC(k)とし、第2区間T2において、ハイパスフィルター処理部133が生成した変位データMU(k)と補正データ推定部134が生成した補正データMCC2(k)と振動成分データUOSC(k)とを加算し、第3区間T3を振動成分データUOSC(k)として、計測データU’(k)を生成する。すなわち、計測データ生成部136は、図34における計測データ生成工程S170の処理を行う。計測データ生成部136が生成した計測データU’(k)は、計測データ143として記憶部14に記憶される。
このように、計測プログラム141は、図34に示したフローチャートの各手順を、コンピューターである計測装置1に実行させるプログラムである。
以上に説明した第2実施形態の計測方法では、計測装置1は、処理対象である対象データU(k)を用いて、振動成分を低減させた変位データMs(k)及び振動成分を含む振動成分データUOSC(k)を生成する。そして、計測装置1は、変位データMs(k)からドリフトノイズを低減させた変位データMU(k)を生成し、変位データMU(k)の特徴に基づいて第1区間T1、第2区間T2及び第3区間T3を特定し、第2区間T2において補正データMCC(k)を推定する。補正データMCC(k)は、第2区間T2において、変位データMs(k)からドリフトノイズを除いたデータと変位データMU(k)との差に相当するので、ハイパスフィルター処理によって除去された有意な信号成分を含んでいる。したがって、第2実施形態の計測方法によれば、計測装置1は、第1区間T1及び第3区間T3を振動成分データUOSC(k)とし、第2区間T2において、変位データMU(k)と補正データMCC(k)と振動成分データUOSC(k)とを加算することにより、対象データU(k)に対してドリフトノイズが低減された計測データU’(k)を生成することができる。また、第2実施形態の計測方法によれば、計測装置1は、処理対象である対象データU(k)を用いて、変位データMU(k)と補正データMCC2(k)と振動成分データUOSC(k)とを生成し、第2区間T2において変位データMU(k)と補正データMCC2(k)と振動成分データUOSC(k)とを加算することにより、ドリフトノイズを低減させるための情報をあらかじめ用意しなくともドリフトノイズを低減させた計測データU’(k)を生成することができる。そのため、第2実施形態の計測方法を用いることによって、環境の変化によらず精度の良い計測データU’(k)が得られるとともに、低コスト化が可能である。
また、第2実施形態の計測方法によれば、計測装置1は、計測データU’(k)を生成するために、第1区間T1及び第3区間T3において、補正データMCC1(k),MCC3(k)の生成や、変位データMU(k)と補正データMCC1(k),MCC3(k)と振動成分データUOSC(k)との加算が不要であるので、計算量が低減される。
特に、第2実施形態の計測方法によれば、計測装置1は、対象データU(k)に対してドリフトノイズ及び振動成分を低減させた変位データMU(k)の特徴に基づいて、第2区間T2において、より適切な補正データMCC2(k)を生成することができるので、生成される補正データMCC2(k)の推定精度を高めることができる。
その他、第2実施形態の計測方法によれば、第1実施形態の計測方法と同様の効果を奏することができる。
3.変形例
本発明は本実施形態に限定されず、本発明の要旨の範囲内で種々の変形実施が可能である。
上記の各実施形態では、観測装置は加速度データAs(k)を出力するセンサー2であり、対象データは加速度データAs(k)を2回積分して得られる対象データU(k)であるが、観測装置や対象データはこれに限られない。例えば、観測装置は、接触式変位計、リング式変位計、レーザー変位計、感圧センサー、画像処理による変位計測機器又は光ファイバーによる変位計測機器であり、対象データは、これらのいずれかの観測装置の観測データであってもよい。接触式変位計、リング式変位計、レーザー変位計、画像処理による変位計測機器、光ファイバーによる変位計測機器は、鉄道車両6の走行による観測点Rの変位を計測する。感圧センサーは、鉄道車両6の走行による観測点Rの応力変化を検出する。また、例えば、観測装置は、速度センサーであり、対象データは、速度センサーが検出した速度を積分したデータであってもよい。これらの計測方法によれば、計測装置1は、変位、応力変化又は速度のデータを用いて上部構造7の変位を精度良く計測することができる。
一例として、図37に、観測装置としてリング式変位計を用いた計測システム10の構成例を示す。また、図38に、観測装置として画像処理による変位計測機器を用いた計測システム10の構成例を示す。図37及び図38において、図1と同じ構成要素には同じ符号が付されており、その説明を省略する。図37に示す計測システム10では、リング式変位計40の上面とその直上にある主桁Gの下面との間にピアノ線41が固定されており、リング式変位計40が上部構造7の撓みによるピアノ線41の変位を計測し、計測した対象データU(k)を計測装置1に送信する。計測装置1は、リング式変位計40から送信された対象データU(k)からドリフトノイズを除いた計測データU’(k)を生成する。また、図38に示す計測システム10では、カメラ50が、主桁Gの側面に設けられたターゲット51を撮影した画像を計測装置1に送信する。計測装置1は、カメラ50から送信された画像を処理し、上部構造7の撓みによるターゲット51の変位を算出して対象データU(k)を生成し、生成した対象データU(k)からドリフトノイズを除いた計測データU’(k)を生成する。図38の例では、計測装置1が、画像処理による変位計測機器として対象データU(k)を生成しているが、計測装置1とは異なる不図示の変位計測機器が画像処理によって対象データU(k)を生成してもよい。
また、上記の各実施形態では、橋梁5は鉄道橋であり、橋梁5を移動する移動体は鉄道車両6であるが、橋梁5が道路橋であり、橋梁5を移動する移動体が自動車、路面電車、建設車両等の車両であってもよい。図39に、橋梁5が道路橋であり、橋梁5を車両6aが移動する場合の計測システム10の構成例を示す。図39において、図1と同じ構成要素には同じ符号が付されている。図39に示すように、道路橋である橋梁5は、鉄道橋と同様、上部構造7と下部構造8からなる。図40は、上部構造7を図39のA-A線で切断した断面図である。図39及び図40に示すように、上部構造7は、床板F、主桁G、不図示の横桁等からなる橋床7aと、支承7bと、を含む。また、図39に示すように、下部構造8は、橋脚8aと、橋台8bと、を含む。上部構造7は、隣り合う橋台8bと橋脚8a、隣り合う2つの橋台8b、又は、隣り合う2つの橋脚8aのいずれか1つに渡された構造である。上部構造7の両端部は、隣り合う橋台8bと橋脚8aの位置、隣り合う2つの橋台8bの位置、又は、隣り合う2つの橋脚8aの位置にある。橋梁5は、例えば、鋼橋や桁橋、RC橋等である。
各センサー2は上部構造7の長手方向の中央部、具体的には、主桁Gの長手方向の中央部に設置されている。ただし、各センサー2は、上部構造7の変位を算出するための加速度を検出することができればよく、その設置位置は上部構造7の中央部に限定されない。なお、各センサー2を上部構造7の床板Fに設けると、車両6aの走行によって破壊するおそれがあり、また橋床7aの局部的な変形により測定精度が影響を受けるおそれがあるため、図39及び図40の例では、各センサー2は上部構造7の主桁Gに設けられている。
図40に示すように、上部構造7は、移動体である車両6aが移動し得る2つのレーンL1,L2及び3個の主桁Gを有している。図39及び図40の例では、上部構造7の長手方向の中央部において、両端の2つの主桁のそれぞれにセンサー2が設けられており、一方のセンサー2の鉛直上方向にあるレーンL1の表面の位置に観測点R1が設けられ、他方のセンサー2の鉛直上方向にあるレーンL2の表面の位置に観測点R2が設けられている。すなわち、2つのセンサー2は、それぞれ観測点R1,R2を観測する観測装置である。観測点R1,R2をそれぞれ観測する2つのセンサー2は、車両6aの走行により観測点R1,R2に生じる加速度を検出可能な位置に設けられていればよいが、観測点R1,R2に近い位置に設けられることが望ましい。なお、センサー2の数及び設置位置やレーンの数は、図39及び図40に示した例には限定されず種々の変形実施が可能である。
計測装置1は、各センサー2から出力される加速度データに基づいて、車両6aの走行によるレーンL1,L2の撓みの変位を算出し、レーンL1,L2の変位の情報を、通信ネットワーク4を介して、監視装置3に送信する。監視装置3は、当該情報を不図示の記憶装置に記憶し、例えば、当該情報に基づいて車両6aの監視や上部構造7の異常判定等の処理を行ってもよい。
また、上記の各実施形態では、各センサー2は、それぞれ上部構造7の主桁Gに設けられているが、上部構造7の表面や内部、床板Fの下面、橋脚8a等に設けられていてもよい。また、上記の各実施形態では、構造物として橋梁の上部構造を例に挙げたが、これに限られず、構造物は移動体の移動によって変形するものであればよい。
橋梁を通過する鉄道車両又は車両は、重量が大きく、BWIMで計測可能な車両である。BWIMは、Bridge Weigh in Motionの略であり、橋梁を「はかり」に見立て、橋梁の変形を計測することにより、橋梁を通行する鉄道車両又は車両の重量、軸数などを測定する技術である。変形やひずみなどの応答から走行する鉄道車両又は車両の重量を解析可能な橋梁の上部構造は、BWIMが機能する構造物であり、橋梁の上部構造への作用と応答の間の物理的なプロセスを応用するBWIMシステムが走行する車両の重量の計測を可能にする。
上述した実施形態および変形例は一例であって、これらに限定されるわけではない。例えば、各実施形態および各変形例を適宜組み合わせることも可能である。
本発明は、実施の形態で説明した構成と実質的に同一の構成、例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
上述した実施形態および変形例から以下の内容が導き出される。
計測方法の一態様は、
ドリフトノイズ及び振動成分を含む対象データをローパスフィルター処理して前記振動成分を低減させた振動成分低減データを生成するローパスフィルター処理工程と、
前記振動成分低減データをハイパスフィルター処理して前記ドリフトノイズを低減させたドリフトノイズ低減データを生成するハイパスフィルター処理工程と、
前記ドリフトノイズ低減データに基づいて、前記振動成分低減データから前記ドリフトノイズを除いたデータと前記ドリフトノイズ低減データとの差に相当する補正データを推定する補正データ推定工程と、
前記対象データから前記振動成分低減データを減算して前記振動成分を含む振動成分データを生成する振動成分データ生成工程と、
前記ドリフトノイズ低減データと前記補正データと前記振動成分データとを加算して計測データを生成する計測データ生成工程と、を含む。
この計測方法では、処理対象である対象データを用いて振動成分を低減させた振動成分低減データ及び振動成分を含む振動成分データを生成し、振動成分低減データからドリフトノイズを低減させたドリフトノイズ低減データを生成し、ドリフトノイズ低減データに基づいて補正データを推定する。ドリフトノイズ低減データは振動成分が低減されているので、高い精度で推定された補正データが得られる。そして、補正データは、振動成分低減データからドリフトノイズを除いたデータとドリフトノイズ低減データとの差に相当するので、ハイパスフィルター処理によって除去された有意な信号成分を含んでいる。したがって、この計測方法によれば、ドリフトノイズ低減データと補正データと振動成分データとを加算することにより、対象データに対してドリフトノイズが低減された計測データを生成することができる。また、この計測方法によれば、処理対象である対象データを用いて、ドリフトノイズ低減データと補正データと振動成分データとを生成し、ドリフトノイズ低減データと補正データと振動成分データとを加算することにより、ドリフトノイズを低減させるための情報をあらかじめ用意しなくともドリフトノイズを低減させた計測データを生成することができる。そのため、この計測方法を用いることによって、環境の変化によらず精度の良い計測データが得られるとともに、低コスト化が可能である。
前記計測方法の一態様において、
前記補正データ推定工程は、
前記ドリフトノイズ低減データの第1ピーク及び第2ピークを算出し、前記第1ピーク以前の第1区間と、前記第1ピークと前記第2ピークとの間の第2区間と、前記第2ピーク以降の第3区間と、を特定する区間特定工程と、
前記第1区間において、前記ドリフトノイズ低減データの符号を反転して第1区間補正データを生成する第1区間補正データ生成工程と、
前記第2区間の所定の時刻以前において、前記第1ピーク以前の前記ドリフトノイズ低減データを前記第1ピーク以降に逆順に並べ替えたデータと、前記第1ピークと前記第2ピークとを通る直線に-2を乗算した直線データとを加算し、前記第2区間の前記所定の時刻以降において、前記第2ピーク以降の前記ドリフトノイズ低減データを前記第2ピーク以前に逆順に並べ替えたデータと、前記直線データとを加算して、第2区間補正データを生成する第2区間補正データ生成工程と、
前記第3区間において、前記ドリフトノイズ低減データの符号を反転して第3区間補正データを生成する第3区間補正データ生成工程と、
前記第1区間補正データと前記第2区間補正データと前記第3区間補正データとを加算して前記補正データを生成する補正データ生成工程と、を含んでもよい。
この計測方法によれば、対象データに対してドリフトノイズ及び振動成分を低減させたドリフトノイズ低減データの特徴に基づいて3つの区間を特定し、各区間において、より適切な補正データを生成することができるので、生成される補正データの推定精度を高めることができる。
計測方法の他の一態様は、
ドリフトノイズ及び振動成分を含む対象データをローパスフィルター処理して前記振動成分を低減させた振動成分低減データを生成するローパスフィルター処理工程と、
前記振動成分低減データをハイパスフィルター処理して前記ドリフトノイズを低減させたドリフトノイズ低減データを生成するハイパスフィルター処理工程と、
前記ドリフトノイズ低減データの第1ピーク及び第2ピークを算出し、前記第1ピーク以前の第1区間と、前記第1ピークと前記第2ピークとの間の第2区間と、前記第2ピーク以降の第3区間と、を特定する区間特定工程と、
前記ドリフトノイズ低減データに基づいて、前記第2区間において、前記振動成分低減データから前記ドリフトノイズを除いたデータと前記ドリフトノイズ低減データとの差に相当する補正データを推定する補正データ推定工程と、
前記対象データから前記振動成分低減データを減算して前記振動成分を含む振動成分データを生成する振動成分データ生成工程と、
前記第1区間を前記振動成分低減データとし、前記第2区間において、前記ドリフトノイズ低減データと前記補正データと前記振動成分データとを加算し、前記第3区間を前記振動成分低減データとして、計測データを生成する計測データ生成工程と、を含む。
この計測方法では、処理対象である対象データを用いて振動成分を低減させた振動成分低減データ及び振動成分を含む振動成分データを生成し、振動成分低減データからドリフトノイズを低減させたドリフトノイズ低減データを生成し、ドリフトノイズ低減データの特徴に基づいて3つの区間を特定し、第2区間において補正データを推定する。ドリフトノイズ低減データは振動成分が低減されているので、第2区間において高い精度で推定された補正データが得られる。そして、補正データは、第2区間において、振動成分低減データからドリフトノイズを除いたデータとドリフトノイズ低減データとの差に相当するので、ハイパスフィルター処理によって除去された有意な信号成分を含んでいる。したがって、この計測方法によれば、第1区間及び第3区間を振動成分データとし、第2区間において、ドリフトノイズ低減データと補正データと振動成分データとを加算することにより、対象データに対してドリフトノイズが低減された計測データを生成することができる。また、この計測方法によれば、処理対象である対象データを用いて、ドリフトノイズ低減データと補正データと振動成分データとを生成し、第2区間においてドリフトノイズ低減データと補正データと振動成分データとを加算することにより、ドリフトノイズを低減させるための情報をあらかじめ用意しなくともドリフトノイズを低減させた計測データを生成することができる。そのため、この計測方法を用いることによって、環境の変化によらず精度の良い計測データが得られるとともに、低コスト化が可能である。
また、この計測方法によれば、計測データを生成するために、第1区間及び第3区間において、補正データの生成やドリフトノイズ低減データと補正データと振動成分データとの加算が不要であるので、計算量が低減される。
前記計測方法の一態様において、
前記補正データ推定工程では、
前記第2区間の所定の時刻以前において、前記第1ピーク以前の前記ドリフトノイズ低減データを前記第1ピーク以降に逆順に並べ替えたデータと、前記第1ピークと前記第2ピークとを通る直線に-2を乗算した直線データとを加算し、前記第2区間の前記所定の時刻以降において、前記第2ピーク以降の前記ドリフトノイズ低減データを前記第2ピーク以前に逆順に並べ替えたデータと、前記直線データとを加算して、前記補正データを生成してもよい。
この計測方法によれば、対象データに対してドリフトノイズ及び振動成分を低減させたドリフトノイズ低減データの特徴に基づいて、第2区間において、より適切な補正データを生成することができるので、生成される補正データの推定精度を高めることができる。
前記計測方法の一態様において、
前記ローパスフィルター処理工程では、
前記対象データを高速フーリエ変換処理して基本周波数を算出し、前記ローパスフィルター処理として、前記基本周波数に対応する周期で前記対象データを移動平均処理して前記振動成分低減データを生成してもよい。
この計測方法では、移動平均処理は、必要な計算量が小さいだけでなく、基本周波数の信号成分及びその高調波成分の減衰量が非常に大きいので、振動成分が効果的に低減された振動成分低減データが得られる。したがって、この計測方法によれば、振動成分の影響を排除して補正データの推定精度を高めることができる。
前記計測方法の一態様において、
前記ローパスフィルター処理工程では、
前記対象データを高速フーリエ変換処理して基本周波数を算出し、前記ローパスフィルター処理として、前記対象データに対して前記基本周波数以上の周波数の信号成分を減衰させるFIRフィルター処理を行って前記振動成分低減データを生成してもよい。
この計測方法では、FIRフィルター処理は、移動平均処理よりも計算量が大きいが、基本周波数以上の周波数の信号成分をすべて減衰させることができる。したがって、この計測方法によれば、基本周波数以上の振動成分の影響を排除して補正データの推定精度を高めることができる。
前記計測方法の一態様において、
前記ハイパスフィルター処理は、前記振動成分低減データから、前記振動成分低減データを移動平均処理又はFIRフィルター処理したデータを減算する処理であってもよい。
この計測方法によれば、ハイパスフィルター処理を簡易に行うことができるとともに、移動平均処理又はFIRフィルター処理では振動成分低減データに含まれる各信号成分の群遅延が一定であるので、補正データを精度良く推定することができる。
前記計測方法の一態様において、
前記対象データは、構造物を移動する移動体による前記構造物の変位のデータであってもよい。
この計測方法によれば、ドリフトノイズが低減された計測データとして、移動体の移動による構造物の変位データが得られるので、構造物の変位を精度良く計測することができる。
前記計測方法の一態様において、
前記対象データは、前記移動体が移動する前記構造物の面と交差する方向の加速度を2回積分したデータであってもよい。
この計測方法によれば、構造物に設置された加速度センサーの出力データを用いて構造物の変位を精度良く計測することができる。
前記計測方法の一態様において、
前記対象データは、接触式変位計、リング式変位計、レーザー変位計、感圧センサー、画像処理による変位計測機器若しくは光ファイバーによる変位計測機器の観測データ、又は速度センサーが検出した速度を積分したデータであってもよい。
この計測方法によれば、変位、応力変化又は速度のデータを用いて構造物の変位を精度良く計測することができる。
前記計測方法の一態様において、
前記構造物は、橋梁の上部構造であってもよい。
この計測方法によれば、橋梁の上部構造の変位を精度良く計測することができる。
前記計測方法の一態様において、
前記ドリフトノイズの周波数は、前記上部構造の固有振動周波数の最小値よりも低くてもよい。
この計測方法によれば、ローパスフィルター処理及びハイパスフィルター処理のカットオフ周波数を、上部構造のドリフトノイズの周波数よりも高く、かつ、固有振動周波数の最小値よりも低く設定することにより、生成される変位データにおいて、上部構造の固有振動周波数の信号成分及びその高調波成分を低減させずに、ドリフトノイズを低減させることができる。
前記計測方法の一態様において、
前記移動体は、車両又は鉄道車両であってもよい。
この計測方法によれば、車両又は鉄道車両の移動による構造物の変位を精度良く計測することができる。
前記計測方法の一態様において、
前記対象データは、正方向又は負方向に凸の波形のデータを含んでもよい。
この計測方法によれば、正方向又は負方向に凸の波形の特徴に基づいてより適切な補正データを生成することができるので、生成される補正データの推定精度を高めることができる。
前記計測方法の一態様において、
前記波形は、矩形波形、台形波形又は正弦半波波形であってもよい。
この計測方法によれば、矩形波形、台形波形又は正弦半波波形の特徴に基づいてより適切な補正データを生成することができるので、生成される補正データの推定精度を高めることができる。
計測装置の一態様は、
ドリフトノイズ及び振動成分を含む対象データをローパスフィルター処理して前記振動成分を低減させた振動成分低減データを生成するローパスフィルター処理部と、
前記振動成分低減データをハイパスフィルター処理して前記ドリフトノイズを低減させたドリフトノイズ低減データを生成するハイパスフィルター処理部と、
前記ドリフトノイズ低減データに基づいて、前記振動成分低減データから前記ドリフトノイズを除いたデータと前記ドリフトノイズ低減データとの差に相当する補正データを推定する補正データ推定部と、
前記対象データから前記振動成分低減データを減算して前記振動成分を含む振動成分データを生成する振動成分データ生成部と、
前記ドリフトノイズ低減データと前記補正データと前記振動成分データとを加算して計測データを生成する計測データ生成部と、を含む。
この計測装置は、処理対象である対象データを用いて振動成分を低減させた振動成分低減データ及び振動成分を含む振動成分データを生成し、振動成分低減データからドリフトノイズを低減させたドリフトノイズ低減データを生成し、ドリフトノイズ低減データに基づいて補正データを推定する。ドリフトノイズ低減データは振動成分が低減されているので、高い精度で推定された補正データが得られる。そして、補正データは、振動成分低減データからドリフトノイズを除いたデータとドリフトノイズ低減データとの差に相当するので、ハイパスフィルター処理によって除去された有意な信号成分を含んでいる。したがって、この計測装置によれば、ドリフトノイズ低減データと補正データと振動成分データとを加算することにより、対象データに対してドリフトノイズが低減された計測データを生成することができる。また、この計測装置によれば、処理対象である対象データを用いて、ドリフトノイズ低減データと補正データと振動成分データとを生成し、ドリフトノイズ低減データと補正データと振動成分データとを加算することにより、ドリフトノイズを低減させるための情報をあらかじめ用意しなくともドリフトノイズを低減させた計測データを生成することができる。そのため、この計測装置を用いることによって、環境の変化によらず精度の良い計測データが得られるとともに、低コスト化が可能である。
計測システムの一態様は、
前記計測装置の一態様と、
観測点を観測する観測装置と、を備え、
前記対象データは、前記観測装置による観測データに基づくデータである。
計測プログラムの一態様は、
ドリフトノイズ及び振動成分を含む対象データをローパスフィルター処理して前記振動成分を低減させた振動成分低減データを生成するローパスフィルター処理工程と、
前記振動成分低減データをハイパスフィルター処理して前記ドリフトノイズを低減させたドリフトノイズ低減データを生成するハイパスフィルター処理工程と、
前記ドリフトノイズ低減データに基づいて、前記振動成分低減データから前記ドリフトノイズを除いたデータと前記ドリフトノイズ低減データとの差に相当する補正データを推定する補正データ推定工程と、
前記対象データから前記振動成分低減データを減算して前記振動成分を含む振動成分データを生成する振動成分データ生成工程と、
前記ドリフトノイズ低減データと前記補正データと前記振動成分データとを加算して計測データを生成する計測データ生成工程と、をコンピューターに実行させる。
この計測プログラムでは、処理対象である対象データを用いて振動成分を低減させた振動成分低減データ及び振動成分を含む振動成分データを生成し、振動成分低減データからドリフトノイズを低減させたドリフトノイズ低減データを生成し、ドリフトノイズ低減データに基づいて補正データを推定する。ドリフトノイズ低減データは振動成分が低減されているので、高い精度で推定された補正データが得られる。そして、補正データは、振動成分低減データからドリフトノイズを除いたデータとドリフトノイズ低減データとの差に相当するので、ハイパスフィルター処理によって除去された有意な信号成分を含んでいる。したがって、この計測プログラムによれば、ドリフトノイズ低減データと補正データと振動成分データとを加算することにより、対象データに対してドリフトノイズが低減された計測データを生成することができる。また、この計測プログラムによれば、処理対象である対象データを用いて、ドリフトノイズ低減データと補正データと振動成分データとを生成し、ドリフトノイズ低減データと補正データと振動成分データとを加算することにより、ドリフトノイズを低減させるための情報をあらかじめ用意しなくともドリフトノイズを低減させた計測データを生成することができる。そのため、この計測プログラムを用いることによって、環境の変化によらず精度の良い計測データが得られるとともに、低コスト化が可能である。