JP7651925B2 - 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 - Google Patents
可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 Download PDFInfo
- Publication number
- JP7651925B2 JP7651925B2 JP2021067475A JP2021067475A JP7651925B2 JP 7651925 B2 JP7651925 B2 JP 7651925B2 JP 2021067475 A JP2021067475 A JP 2021067475A JP 2021067475 A JP2021067475 A JP 2021067475A JP 7651925 B2 JP7651925 B2 JP 7651925B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation axis
- movable
- distance
- connection portion
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Landscapes
- Optical Radar Systems And Details Thereof (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Manipulator (AREA)
- Instrument Panels (AREA)
- Micromachines (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
図1は、第1実施形態に係る可動装置である光偏向器を例示する平面図である。図2は、図1のA-A切断線に沿う断面図である。
図1において、距離L1は、第2の接続部107aのうち、回動軸Eと直交する直交方向Fで回動軸Eから最も離れた部分140aと、回動軸Eと、の間の距離を表している。距離L2は、可動部103のうち、直交方向Fで回動軸Eから最も離れた部分141と、回動軸Eと、の間の距離を表している。距離L3は、第1の接続部108bのうち、直交方向Fで回動軸Eから最も離れた部分142と、回動軸Eと、の間の距離を表している。図1に示すように、本実施形態では、距離L1は距離L2よりも長い。なお、距離L2と距離L3は等しいため、図1では距離L3を括弧書きで表示している。
θ∝1/L12
以上説明したように、本実施形態に係る光偏向器100(可動装置)は、可動部103と、可動部103を回動軸E周りに回動可能なアクチュエータ104a(駆動部)と、を備える。アクチュエータ104aは、複数の梁部105a、105b、105c及び105dと、隣り合う梁部を接続する第1の接続部108a、108b及び108cと、第2の接続部107aと、を有する。
次に、第1実施形態の変形例について説明する。なお、上述した実施形態と同一の構成部には同一の符号を付し、重複する説明を適宜省略する。
L1>L3>L2 ・・・ (1)
L1>L2>L3 ・・・ (2)
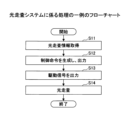
まず、実施形態に係る可動装置を適用した光走査システムについて、図9乃至図12に基づいて詳細に説明する。
次に、実施形態に係る可動装置を適用した画像投影装置について、図13及び図14を用いて詳細に説明する。画像投影装置は、光走査により画像を投影する装置であり、例えばヘッドアップディスプレイ装置である。
次に、実施形態に係る可動装置を適用した物体認識装置について、図15及び図16を用いて詳細に説明する。物体認識装置は、対象方向の物体を認識する装置であり、例えばライダ装置である。
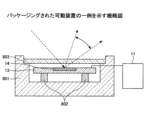
次に、実施形態に係る可動装置のパッケージングについて図17を用いて説明する。図17は、パッケージングされた可動装置の一例の概略図である。
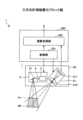
次に、実施形態に係る可動装置13を適用した計測装置について、図18及び図19を用いて詳細に説明する。ここでは、パターン投影法を用いて対象物の三次元計測を行う三次元計測装置を計測装置の一例とする。図18は、三次元計測装置の構成の一例を示すブロック図である。図19は、三次元計測装置により対象物に計測用パターンが投影されている状態を示す図である。
次に、実施形態に係る可動装置13を適用したロボットについて、図20を用いて詳細に説明する。図20は、ロボット70の多関節を有するロボットアームを示す図である。
2 投影装置
3 VCSELアレイ
4 光学系
6 投影光
7 対象物
70 ロボット
71 ハンド部
72 ロボットアーム
10 光走査システム
11 制御装置
12、12b 光源装置
13 可動装置
14 反射面
15 被走査面
25 光源装置ドライバ
26 可動装置ドライバ
30 制御部
31 駆動信号出力部
100 光偏向器(可動装置の一例)
101 ミラー部
102 ミラー反射面
103 可動部
104a、104b アクチュエータ(駆動部の一例)
105a、105b、105c、105d 梁部
106a、106b、106c、106d 梁部
107a、107b 第2の接続部
108a、108b、108c 第1の接続部
109a、109b、109c 第1の接続部
110b、110d、111a、111c 第1の圧電部材
110a、110c、111b、111d 第2の圧電部材
130 シリコン層
131 下部電極
132 圧電層
133 上部電極
140a、140b 第2の接続部のうち、直交方向で回動軸から最も離れた部分
141 可動部のうち、直交方向で回動軸から最も離れた部分
142 第1の接続部のうち、直交方向で回動軸から最も離れた部分
150 結合形状
400 自動車(移動体の一例、車両の一例)
E 回動軸
F 直交方向
L1、L2、L3 距離
θ 角度
Claims (17)
- 可動部と、
前記可動部を回動軸周りに回動可能な駆動部と、を備え、
前記駆動部は、
複数の梁部と、
隣り合う前記梁部を接続する第1の接続部と、
前記梁部と前記可動部を接続する第2の接続部と、を有し、
前記第2の接続部のうち、前記回動軸と直交する直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離は、前記可動部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離よりも長く、
前記第2の接続部が前記可動部に接続する位置は、前記回動軸に沿った方向において前記可動部の中央よりも前記駆動部とは反対側であることを特徴とする可動装置。 - 可動部と、
前記可動部を回動軸周りに回動可能な駆動部と、を備え、
前記駆動部は、
複数の梁部と、
隣り合う前記梁部を接続する第1の接続部と、
前記梁部と前記可動部を接続する第2の接続部と、を有し、
前記第2の接続部のうち、前記回動軸と直交する直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離は、前記可動部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離よりも長く、
前記可動部と、前記第2の接続部と、の結合形状は、平面視が平行四辺形状であることを特徴とする可動装置。 - 可動部と、
前記可動部を回動軸周りに回動可能な駆動部と、を備え、
前記駆動部は、
複数の梁部と、
隣り合う前記梁部を接続する第1の接続部と、
前記梁部と前記可動部とを接続する第2の接続部と、を有し、
前記第2の接続部のうち、前記回動軸と直交する直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離は、前記第1の接続部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離よりも長く、
前記第2の接続部が前記可動部に接続する位置は、前記回動軸に沿った方向において前記可動部の中央よりも前記駆動部とは反対側であることを特徴とする可動装置。 - 可動部と、
前記可動部を回動軸周りに回動可能な駆動部と、を備え、
前記駆動部は、
複数の梁部と、
隣り合う前記梁部を接続する第1の接続部と、
前記梁部と前記可動部とを接続する第2の接続部と、を有し、
前記第2の接続部のうち、前記回動軸と直交する直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離は、前記第1の接続部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離よりも長く、
前記可動部と、前記第2の接続部と、の結合形状は、平面視が平行四辺形状であることを特徴とする可動装置。 - 前記駆動部は、前記第2の接続部を介して前記回動軸と交差する方向で前記可動部に接続されていることを特徴とする請求項1乃至4の何れか1項に記載の可動装置。
- 前記第2の接続部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離をL1とし、前記可動部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離をL2とし、前記第1の接続部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離をL3とすると、以下の(1)式の条件を満足することを特徴とする請求項1乃至5の何れか1項に記載の可動装置。
L1>L3>L2 ・・・ (1) - 前記第2の接続部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離をL1とし、前記可動部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離をL2とし、前記第1の接続部のうち、前記直交方向で前記回動軸から最も離れた部分と、前記回動軸と、の間の距離をL3とすると、以下の(2)式の条件を満足することを特徴とする請求項1乃至5の何れか1項に記載の可動装置。
L1>L2>L3 ・・・ (2) - 前記第2の接続部が前記可動部に接続する位置は、前記回動軸に沿った方向において前記可動部の中央よりも前記駆動部側であることを特徴とする請求項1乃至7の何れか1項に記載の可動装置。
- 前記第2の接続部が前記可動部に接続する位置は、前記回動軸に沿った方向において前記可動部の中央であることを特徴とする請求項1乃至7の何れか1項に記載の可動装置。
- 請求項1乃至9の何れか1項に記載の可動装置と、
光を発する光源と、
を備え、
前記光源から発せられた光を偏向して投影することを特徴とする画像投影装置。 - 前記光源は複数設けられており、
複数の前記光源は、異なる波長の光を発するものであって、
複数の前記光源から発した複数の前記光を合成する合成部を更に備え、
前記合成部において合成された光を偏向して投影することを特徴とする請求項10に記載の画像投影装置。 - 請求項1乃至9の何れか1項に記載の可動装置を備えることを特徴とするヘッドアップディスプレイ。
- 請求項1乃至9の何れか1項に記載の可動装置と、
光を発する光源と、を備え、
前記光源から発せられた光を偏向し、前記光が物体に照射され、前記物体において反射された反射光を検出することにより、前記物体を認識することを特徴とする物体認識装置。 - 請求項1乃至9の何れか1項に記載の可動装置と、
光を発する光源と、
を備え、
前記光源から発せられた光を偏向し、前記光が物体に照射され、前記物体において反射された反射光に基づき、前記物体の形状を計測することを特徴とする計測装置。 - 請求項14に記載の計測装置を有するロボット。
- 請求項12に記載のヘッドアップディスプレイ、又は請求項13に記載の物体認識装置の少なくとも1つを有する移動体。
- 請求項12に記載のヘッドアップディスプレイ、又は請求項13に記載の物体認識装置の少なくとも1つを有する車両。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021067475A JP7651925B2 (ja) | 2021-04-13 | 2021-04-13 | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 |
| JP2025036168A JP2025096722A (ja) | 2021-04-13 | 2025-03-07 | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021067475A JP7651925B2 (ja) | 2021-04-13 | 2021-04-13 | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2025036168A Division JP2025096722A (ja) | 2021-04-13 | 2025-03-07 | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022162594A JP2022162594A (ja) | 2022-10-25 |
| JP7651925B2 true JP7651925B2 (ja) | 2025-03-27 |
Family
ID=83724618
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021067475A Active JP7651925B2 (ja) | 2021-04-13 | 2021-04-13 | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 |
| JP2025036168A Pending JP2025096722A (ja) | 2021-04-13 | 2025-03-07 | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2025036168A Pending JP2025096722A (ja) | 2021-04-13 | 2025-03-07 | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7651925B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013168386A1 (ja) | 2012-05-07 | 2013-11-14 | パナソニック株式会社 | 光学反射素子 |
| JP2016102812A (ja) | 2014-11-27 | 2016-06-02 | 株式会社リコー | 光偏向器、画像表示装置及び物体装置 |
| WO2017104613A1 (ja) | 2015-12-18 | 2017-06-22 | 株式会社リコー | 光偏向装置とヘッドアップディスプレイ装置と光書込みユニットと画像形成装置と物体認識装置 |
| JP2018022004A (ja) | 2016-08-02 | 2018-02-08 | 株式会社リコー | 光偏向器、画像表示システム |
| JP2018155989A (ja) | 2017-03-21 | 2018-10-04 | 株式会社リコー | 光走査システム、画像投影装置、物体認識装置 |
| JP2020003531A (ja) | 2018-06-25 | 2020-01-09 | 株式会社リコー | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009223113A (ja) * | 2008-03-18 | 2009-10-01 | Panasonic Corp | 光学反射素子およびこれを用いた画像投影装置 |
| JP2010122413A (ja) * | 2008-11-19 | 2010-06-03 | Panasonic Corp | 光学反射素子 |
| DE102011089514B4 (de) * | 2011-12-22 | 2022-09-01 | Robert Bosch Gmbh | Mikrospiegel und 2-Spiegelsystem |
| JP6959525B2 (ja) * | 2017-12-21 | 2021-11-02 | ミツミ電機株式会社 | 光走査装置 |
| JP7365042B2 (ja) * | 2019-10-18 | 2023-10-19 | フェムトディプロイメンツ株式会社 | 電磁波信号解析装置および電磁波信号解析用プログラム |
-
2021
- 2021-04-13 JP JP2021067475A patent/JP7651925B2/ja active Active
-
2025
- 2025-03-07 JP JP2025036168A patent/JP2025096722A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013168386A1 (ja) | 2012-05-07 | 2013-11-14 | パナソニック株式会社 | 光学反射素子 |
| JP2016102812A (ja) | 2014-11-27 | 2016-06-02 | 株式会社リコー | 光偏向器、画像表示装置及び物体装置 |
| WO2017104613A1 (ja) | 2015-12-18 | 2017-06-22 | 株式会社リコー | 光偏向装置とヘッドアップディスプレイ装置と光書込みユニットと画像形成装置と物体認識装置 |
| JP2018022004A (ja) | 2016-08-02 | 2018-02-08 | 株式会社リコー | 光偏向器、画像表示システム |
| JP2018155989A (ja) | 2017-03-21 | 2018-10-04 | 株式会社リコー | 光走査システム、画像投影装置、物体認識装置 |
| JP2020003531A (ja) | 2018-06-25 | 2020-01-09 | 株式会社リコー | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2025096722A (ja) | 2025-06-27 |
| JP2022162594A (ja) | 2022-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7167500B2 (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| US11750779B2 (en) | Light deflector, optical scanning system, image projection device, image forming apparatus, and lidar device | |
| JP7451930B2 (ja) | 光偏向器、偏向装置、距離測定装置、画像投影装置、及び車両 | |
| JP7501762B2 (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| EP3882683B1 (en) | Movable device, image projection apparatus, object recognition device, and mobile object | |
| JP7172557B2 (ja) | 光偏向装置、画像投影装置、レーザヘッドランプ及び移動体 | |
| JP2021067722A (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| US20220299759A1 (en) | Light deflector, image projection apparatus, and distance-measuring apparatus | |
| US20220299757A1 (en) | Movable device, image projection apparatus, laser headlamp, head-mounted display, distance measurement device, and mobile object | |
| JP7651925B2 (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、物体認識装置、計測装置、ロボット、移動体及び車両 | |
| US12235440B2 (en) | Movable apparatus | |
| US11971537B2 (en) | Light deflection device, distance measurement device, and mobile body | |
| US12196947B2 (en) | Operating device, light deflector, light deflecting device, distance measurement apparatus, image projection apparatus, and mobile object | |
| JP7338403B2 (ja) | 光偏向器、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| JP7764772B2 (ja) | 可動装置、距離測定装置、計測装置、ロボット、電子機器、造形装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、車両および移動体 | |
| JP7501309B2 (ja) | 光学装置、計測装置、ロボット、電子機器および造形装置 | |
| US12379587B2 (en) | Light deflector, image projection apparatus, laser headlamp, head-mounted display, distance measurement apparatus, and mobile object | |
| JP7608909B2 (ja) | 可動装置、偏向装置、物体認識装置、画像投影装置、及び移動体 | |
| JP7456294B2 (ja) | 可動装置、偏向装置、距離測定装置、画像投影装置、及び車両 | |
| JP7790052B2 (ja) | 動作装置、光偏向器、光偏向装置、距離測定装置、画像投影装置及び移動体 | |
| JP2025020044A (ja) | 可動装置、投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置及び移動体、アイトラッキング装置 | |
| JP2018005201A (ja) | アクチュエータ装置、アクチュエータシステム | |
| JP2023140219A (ja) | 可動装置、光偏光素子、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、および移動体 | |
| JP2021148670A (ja) | 測定方法、光学装置、計測装置、移動体、ロボット、電子機器及び造形装置 | |
| JP2025132247A (ja) | 可動装置、投影装置、移動体、ヘッドマウントディスプレイ、ヘッドアップディスプレイ、レーザヘッドランプ、物体認識装置、及び位置検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7651925 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |