JP7643271B2 - 架線設備計測装置および架線設備計測方法 - Google Patents
架線設備計測装置および架線設備計測方法 Download PDFInfo
- Publication number
- JP7643271B2 JP7643271B2 JP2021151635A JP2021151635A JP7643271B2 JP 7643271 B2 JP7643271 B2 JP 7643271B2 JP 2021151635 A JP2021151635 A JP 2021151635A JP 2021151635 A JP2021151635 A JP 2021151635A JP 7643271 B2 JP7643271 B2 JP 7643271B2
- Authority
- JP
- Japan
- Prior art keywords
- data group
- range
- data
- overhead line
- representative value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Length Measuring Devices By Optical Means (AREA)
Description
すなわち、本発明の架線設備計測装置は、複数の測域センサと、前記複数の測域センサからの測域データから架線設備の位置を推定する推定装置と、を備え、前記推定装置は、前記測域データのデータ群の種類を識別するデータ群識別部と、前記データ群識別部の識別結果に基づいて前記データ群を表現する代表値を算出する代表値算出部と、前記代表値から架線設備の位置を推定する位置推定部と、を備える。
本発明によれば、推定装置により、各測域センサから得られた測域データから代表値を算出し、この代表値から架線設備の位置を推定するので、精度が高い架線設備の位置を効率良く得ることができる。
この一態様では、測域センサから得られたデータ群を、一点に近い範囲内に集合しているデータ群であるか、直線で近似される領域内のデータ群であるか、を識別するので、データ群を明確に識別することができる。
この一態様では、データ群の種類に応じて、データ群の平均値か、データ群を近似する直線の式を代表値として算出するので、データ群の種類に基づいて適切な代表値を算出できる。
この一態様では、データ群の種類に応じて、各測域センサの直線の式の交点に基づくか、代表値の直線の式に基づいて架線設備の位置を推定するので、架線設備の種類に応じて架線設備の位置を適確に精度よく推定することができる。
本発明によれば、各測域センサから得られた測域データから代表値を算出し、この代表値から架線設備の位置を推定するので、精度が高い架線設備の位置を効率良く得ることができる。
この一態様では、測域センサから得られたデータ群を、一点に近い範囲内に集合しているデータ群であるか、直線で近似される領域内のデータ群であるか、を識別するので、データ群を明確に識別することができる。
この一態様では、データ群の種類に応じて、データ群の平均値か、データ群を近似する直線の式を代表値として算出するので、データ群の種類に基づいて適切な代表値を算出できる。
この一態様では、データ群の種類に応じて、各測域センサの直線の式の交点に基づくか、代表値の直線の式に基づいて架線設備の位置を推定するので、架線設備の種類に応じて架線設備の位置を適確に精度よく推定することができる。
(実施形態)
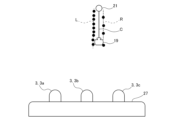
図1は、本発明の実施形態に係る架線設備計測装置の構成を示す模式図である。図4は、本発明の実施形態に係る架線設備計測装置の構成を示す機能ブロック図である。図1に示すように、本実施形態に係る架線設備計測装置1は、複数の測域センサ3と、複数の測域センサ3からの測域データから架線設備の位置を推定する推定装置5と、を備えている。本実施形態における測域センサ3は、車両25の車両屋根27上に3つの測域センサ3a、3b、3cが設けられている。図1は、車両の進行方向に対して垂直な面を表しており、測域センサ3は、車両屋根25上のこの同一面上に原点が位置するように配置されている。
(1)架線設備計測装置1が動作を開始すると(S00)、測域センサ3a、3b、3cは、それぞれ測域データ15を取得する(S01)。
(2)取得した測域データ15は、図4に示す推定装置5のデータ保存部7に送られ保存される。推定装置5では、図3のフローチャートのS02とS10に示す架線設備の計測対象の数だけ繰り返すループ処理と、S03とS07に示すセンサの台数だけ繰り返すループ処理とが行われる。
(6)センサごとの代表値が位置推定部13に送られ(S08)、位置推定部13では、後に詳述するが、上述の処理(4)で得られた代表値がデータ群の平均値であるときに、測域センサの原点と代表値の2点を通る直線の式を算出し、各測域センサの2点を通る直線の互いの交点に基づいて架線設備の位置を推定し、代表値が直線の式であるときに、各測域センサの代表値の直線の式に基づいて架線設備の位置を推定する(S09)。
(7)上記の(5)の処理(S03~S07のループ)と(6)の処理を計測対象の架線設備の数分繰り返す(S02~S10のループ)。
(8)架線設備の位置推定が、計測対象の数だけ処理が終わると一連の動作の終了となる(S11)。
次に、上記(3)の処理におけるデータ群の種類の識別について説明する。図9~図13は、架線設備17によって得られる測域データを説明する為の図である。これらの図では、架線設備17は、トロリ線19、吊架線21、ハンガ23、から構成されている。ここで、データ群の種類の識別とは、上述の図5に示すトロリ線19によって得られる測域データ15のデータ群Tであるか、図9に示す架線金具(ハンガ)23によって得られる測域データ15のデータ群Sであるか、を識別することである。
次に、上記(4)の処理における代表値の算出について説明する。上記(3)の処理において、データ群の統計値により、一点に近い範囲内にあるデータ群であると識別された場合、データ群の座標の平均値を代表値として算出する。あるいは他の代表値の例としては、図5に示すように、角度の中央値θと当該角度における距離dとを代表値としてもよい。代表値の算出は、センサごとに行うが、少なくともセンサが車両の左右に設置された場合は、各センサのデータ群を合わせてから距離dと角度θを求めてもよい。この代表値の算出には、上述した外れ値の除去が行われた後のデータ群のデータが使用される。
次に、上記(6)の処理における架線設備の位置の推定について説明する。まず、代表値がデータ群の平均値であるときについて説明する。図6は、本実施形態における3つの測域センサ3a、3b、3cによる架線設備位置の測定を示す図である。図6に示すように、上記(4)の処理において、各測域センサ3a、3b、3cによって得られた代表値u1、u2,u3が一点に近い範囲内に集合しているデータ群からの代表値であるとき、位置推定部13では、各測域センサ3a、3b、3cの原点J1、J2、J3と前記代表値u1、u2,u3の2点を通る直線の式を各測域センサについて算出する。


図2、図8は、本変形例を示す架線設備計測装置10を示す図である。本変形例における測域センサ3は、車両25の車両屋根27上に4つの測域センサ3a、3b、3c、3dが設けられている。上述の実施形態のように3台の測域センサ3a、3b、3cで計測していた場合、架線設備の位置によっては吊架線21がトロリ線19の陰となって計測できない場合がある。これを避けるため、図8のように4台の測域センサ3a、3b、3c、3dにより計測を行う。これにより、一部の測域センサで計測ができなかった場合でも、残りの測域センサの計測結果から架線の偏位・高さを算出することができる。
3、3a、3b、3c、3d 測域センサ
5 推定装置
9 データ群識別部
11 代表値算出部
13 位置推定部
15 測域データ
Claims (2)
- 複数の測域センサと、
前記複数の測域センサからの測域データから架線設備の位置を推定する推定装置と、を備え、
前記推定装置は、
前記測域データのデータ群が、トロリ線によるデータ群であるか、それとも、架線金具によるデータ群であるかを識別するデータ群識別部と、
前記測域データのデータ群が前記トロリ線によるデータ群である場合には、データ群の特定の位置を示す代表値を算出し、前記測域データのデータ群が前記架線金具によるデータ群であると識別された場合には、前記測域データのデータ群を直線近似した際の近似直線を示す代表値を算出する代表値算出部と、
前記測域データのデータ群が前記トロリ線によるデータ群である場合には、前記複数の測域センサと代表値を結ぶ直線の交点を用いて、前記架線設備の位置を推定し、前記測域データのデータ群が前記架線金具によるデータ群であると識別された場合には、前記複数の測域センサのデータ群を直線近似した際に得られた、対向する近似直線の中心線を用いて、前記架線設備の位置を推定する位置推定部と、を備える、架線設備計測装置。 - 複数の測域センサで測域データを取得すること、
前記測域データのデータ群が、トロリ線によるデータ群であるか、それとも、架線金具によるデータ群であるかを識別すること、
前記測域データのデータ群が前記トロリ線によるデータ群である場合には、データ群の特定の位置を示す代表値を算出し、前記測域データのデータ群が前記架線金具によるデータ群であると識別された場合には、前記測域データのデータ群を直線近似した際の近似直線を示す代表値を算出すること、
前記測域データのデータ群が前記トロリ線によるデータ群である場合には、前記複数の測域センサと代表値を結ぶ直線の交点を用いて、架線設備の位置を推定し、前記測域データのデータ群が前記架線金具によるデータ群であると識別された場合には、前記複数の測域センサのデータ群を直線近似した際に得られた、対向する近似直線の中心線を用いて、前記架線設備の位置を推定すること、
を含む架線設備計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021151635A JP7643271B2 (ja) | 2021-09-17 | 2021-09-17 | 架線設備計測装置および架線設備計測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021151635A JP7643271B2 (ja) | 2021-09-17 | 2021-09-17 | 架線設備計測装置および架線設備計測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023043904A JP2023043904A (ja) | 2023-03-30 |
| JP7643271B2 true JP7643271B2 (ja) | 2025-03-11 |
Family
ID=85725883
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021151635A Active JP7643271B2 (ja) | 2021-09-17 | 2021-09-17 | 架線設備計測装置および架線設備計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7643271B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030142297A1 (en) | 2000-07-18 | 2003-07-31 | Ettore Casagrande | Apparatus for measuring the characteristic parameters of an overhead railway or traming line |
| JP2010285054A (ja) | 2009-06-11 | 2010-12-24 | Meidensha Corp | 電気鉄道保守用車両位置測定装置 |
| JP2014169936A (ja) | 2013-03-04 | 2014-09-18 | Railway Technical Research Institute | 架空電車線線条位置計測方法及び装置 |
| JP2016024141A (ja) | 2014-07-24 | 2016-02-08 | 株式会社明電舎 | 架線位置測定装置及び方法 |
-
2021
- 2021-09-17 JP JP2021151635A patent/JP7643271B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030142297A1 (en) | 2000-07-18 | 2003-07-31 | Ettore Casagrande | Apparatus for measuring the characteristic parameters of an overhead railway or traming line |
| JP2010285054A (ja) | 2009-06-11 | 2010-12-24 | Meidensha Corp | 電気鉄道保守用車両位置測定装置 |
| JP2014169936A (ja) | 2013-03-04 | 2014-09-18 | Railway Technical Research Institute | 架空電車線線条位置計測方法及び装置 |
| JP2016024141A (ja) | 2014-07-24 | 2016-02-08 | 株式会社明電舎 | 架線位置測定装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023043904A (ja) | 2023-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2021022383A5 (ja) | ||
| JP5602392B2 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| US10262429B2 (en) | Marker image processing system | |
| US11667036B2 (en) | Workpiece picking device and workpiece picking method | |
| JP4687563B2 (ja) | 車両用レーンマーク認識装置 | |
| JP2020196124A5 (ja) | ||
| US8971576B2 (en) | Information processing apparatus and processing method thereof | |
| JP2009041972A (ja) | 画像処理装置及びその方法 | |
| JP7487388B2 (ja) | 測定装置、測定方法、及び、プログラム | |
| TWI504858B (zh) | A vehicle specification measuring and processing device, a vehicle specification measuring method, and a recording medium | |
| CN111630342B (zh) | 视觉焊接系统的缝隙检测方法以及系统 | |
| EP2924612A1 (en) | Object detection device, object detection method, and computer readable storage medium comprising object detection program | |
| JP6119225B2 (ja) | 交差点道路境界検出装置及びプログラム | |
| JP2017078607A (ja) | 車両位置推定装置及びプログラム | |
| CN112731451B (zh) | 一种基于激光雷达检测地面障碍物的方法及系统 | |
| CN108801136B (zh) | 一种车辆稳定性实验中车辆模型横向位移及姿态确定方法 | |
| EP3333829B1 (en) | Step detection device and step detection method | |
| KR20200065875A (ko) | 랜드마크를 활용한 주행차로 인식 방법 및 시스템 | |
| JP2019512699A5 (ja) | ||
| CN113811743A (zh) | 用于确定运输工具位置的方法和装置 | |
| JP2015007639A (ja) | 情報処理装置、情報処理方法およびプログラム | |
| EP4082867B1 (en) | Automatic camera inspection system | |
| JP7643271B2 (ja) | 架線設備計測装置および架線設備計測方法 | |
| JPH10187974A (ja) | 物流計測装置 | |
| US11828841B2 (en) | Method and device for estimating the height of a reflector of a vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241009 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241022 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7643271 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |