JP7635482B2 - 情報処理装置、方法、およびプログラム - Google Patents
情報処理装置、方法、およびプログラム Download PDFInfo
- Publication number
- JP7635482B2 JP7635482B2 JP2021030870A JP2021030870A JP7635482B2 JP 7635482 B2 JP7635482 B2 JP 7635482B2 JP 2021030870 A JP2021030870 A JP 2021030870A JP 2021030870 A JP2021030870 A JP 2021030870A JP 7635482 B2 JP7635482 B2 JP 7635482B2
- Authority
- JP
- Japan
- Prior art keywords
- detection
- image
- human
- images
- object detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Image Analysis (AREA)
Description
ここで、類似度の算出について詳細に説明する。例えば、類似度算出部141は、ZNCC(Zero-mean Normalized Cross Correlation、零平均正規化相互相関)の手法を用いることができる。例えば、物体が含まれるM画素×N画素の矩形と、他の画像内でのM画素×N画素の矩形と、の類似度を算出するとする。2つの矩形の同一の座標の各画素(T(i,j)とI(i,j)とする)を用いる。類似度算出部141は、類似度として、

を算出することができる。

である。なお、
である。類似度が1であると画像に変化がない、つまり画像内の物体の動きが無いと判定することができ、類似度が-1に近づくほど画像が類似していない、つまり画像内の物体の動きが有ると判定することができる。
以下、図4を参照しながら人検出判定処理について説明し、図5を参照しながら動き判定処理について説明する。
動きの判定について詳細に説明する。
以下、他の実施形態について説明する。
本発明の一実施形態では、情報処理装置10は、人の身体のパーツ(例えば、全身に限らず、頭、腕、上半身、下半身、左右半身等の一部分)を検出して、検出された人の身体のパーツの動きを判定することができる。
上記では、ZNCC等のテンプレートマッチングにより2つの画像(フレーム)の物体検出領域が類似しているか否かを判定する実施形態を説明したが、本発明は、2つの画像(フレーム)の物体検出領域の輝度による評価値(例えば、輝度の差の平均)により2つの画像(フレーム)が類似しているか否かを判定する実施形態にも適用することができる。
本発明の一実施形態では、動き判定部104は、物体の動きが周期的な動きであるか否かをさらに判定することができる。そして、人検出判定部105は、物体の動きが周期的な動きである場合には物体の検出は人でない(例えば、風によって揺れる照明・旗・カーテン、車のライトの点滅等の人以外の検出である)と判定する。
学習済みモデルは、人らしい動き(人が移動している、人が静止している等)のパターンを予め学習していてもよい。動き判定部104は、複数のフレームから、多クラスでどの動きのパターンに該当するかを出力するようにしてもよい。
このように、本発明の一実施形態では、防犯、監視カメラ等が撮影した画像内で人らしいと想定されて検出した物体が人であるか、あるいは、人ではないかを精度よく判定することができる。さらに、本発明の一実施形態では、人の身体のパーツごとに、検出のスコア(検出の信頼度)の閾値および動きの判定の閾値を設定することによって、身体の一部が隠蔽されていたり、さまざまな体勢であったりする侵入者の判定の精度を向上させることができる。
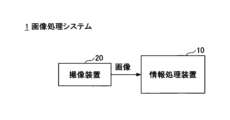
図7は、本発明の一実施形態に係る情報処理装置10のハードウェア構成の一例を示すブロック図である。情報処理装置10は、CPU(Central Processing Unit)1001、ROM(Read Only Memory)1002、RAM(Random Access Memory)1003を有する。CPU1001、ROM1002、RAM1003は、いわゆるコンピュータを形成する。
10 情報処理装置
20 撮像装置
101 画像取得部
102 物体検出部
103 検出スコア判定部
104 動き判定部
105 人検出判定部
141 類似度算出部
142 判定部
1001 CPU
1002 ROM
1003 RAM
1004 補助記憶装置
1005 表示装置
1006 操作装置
1007 I/F装置
1008 ドライブ装置
1009 記憶媒体
Claims (7)
- 撮像装置から複数の画像を取得する画像取得部と、
前記画像内において人の身体の一部分らしい物体を検出する物体検出部と、
前記人の身体の一部分ごとの動きの大きさに基づいて設定された、物体の動きの有無を判定するための閾値であって、少なくとも腕部と脚部との一方を含む動きが大きい部位に対して設定される閾値は、少なくとも頭部を含む動きが少ない部位に対して設定される閾値より大きい値に設定された閾値に基づいて、前記物体が検出された物体検出画像と、該物体検出画像以外の複数の画像と、が類似するか否かに基づいて、前記物体の動きの有無を判定する動き判定部と、
前記人の身体の一部分ごとに設定された、前記物体の検出の信頼度を判定するための閾値に基づいて、前記画像内での物体の検出の信頼度が閾値よりも大きい場合、および前記物体の動きが有る場合には前記検出した物体は人であると判定し、前記物体の動きが無い場合には前記検出した物体は人でないと判定する人検出判定部と
を備えた情報処理装置。 - 前記動き判定部は、前記物体検出画像における物体検出領域と、前記物体検出画像以外の複数の画像における前記物体検出領域と同一の座標位置にある領域と、が類似するか否かに基づいて、前記物体の動きの有無を判定する、請求項1に記載の情報処理装置。
- 前記動き判定部は、パターンマッチングによる類似度に基づいて、前記物体検出画像における物体検出領域と、前記物体検出画像以外の複数の画像における前記物体検出領域と同一の座標位置にある領域と、が類似するか否かを判定する、請求項1または2に記載の情報処理装置。
- 前記動き判定部は、輝度の差に基づいて、前記物体検出画像における物体検出領域と、前記物体検出画像以外の複数の画像における前記物体検出領域と同一の座標位置にある領域と、が類似するか否かを判定する、請求項1または2に記載の情報処理装置。
- 前記動き判定部は、前記物体の動きが周期的な動きであるか否かをさらに判定し、
前記人検出判定部は、前記物体の動きが周期的な動きである場合には前記検出した物体は人でないと判定する、請求項1から4のいずれか一項に記載の情報処理装置。 - 情報処理装置が実行する方法であって、
撮像装置から複数の画像を取得するステップと、
前記画像内において人の身体の一部分らしい物体を検出するステップと、
前記人の身体の一部分ごとの動きの大きさに基づいて設定された、物体の動きの有無を判定するための閾値であって、少なくとも腕部と脚部との一方を含む動きが大きい部位に対して設定される閾値は、少なくとも頭部を含む動きが少ない部位に対して設定される閾値より大きい値に設定された閾値に基づいて、前記物体が検出された物体検出画像と、該物体検出画像以外の複数の画像と、が類似するか否かに基づいて、前記物体の動きの有無を判定するステップと、
前記人の身体の一部分ごとに設定された、前記物体の検出の信頼度を判定するための閾値に基づいて、前記画像内での物体の検出の信頼度が閾値よりも大きい場合、および前記物体の動きが有る場合には前記検出した物体は人であると判定し、前記物体の動きが無い場合には前記検出した物体は人でないと判定するステップと
を含む方法。 - 情報処理装置を
撮像装置から複数の画像を取得する画像取得部、
前記画像内において人の身体の一部分らしい物体を検出する物体検出部、
前記人の身体の一部分ごとの動きの大きさに基づいて設定された、物体の動きの有無を判定するための閾値であって、少なくとも腕部と脚部との一方を含む動きが大きい部位に対して設定される閾値は、少なくとも頭部を含む動きが少ない部位に対して設定される閾値より大きい値に設定された閾値に基づいて、前記物体が検出された物体検出画像と、該物体検出画像以外の複数の画像と、が類似するか否かに基づいて、前記物体の動きの有無を判定する動き判定部、
前記人の身体の一部分ごとに設定された、前記物体の検出の信頼度を判定するための閾値に基づいて、前記画像内での物体の検出の信頼度が閾値よりも大きい場合、および前記物体の動きが有る場合には前記検出した物体は人であると判定し、前記物体の動きが無い場合には前記検出した物体は人でないと判定する人検出判定部
として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021030870A JP7635482B2 (ja) | 2021-02-26 | 2021-02-26 | 情報処理装置、方法、およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021030870A JP7635482B2 (ja) | 2021-02-26 | 2021-02-26 | 情報処理装置、方法、およびプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022131758A JP2022131758A (ja) | 2022-09-07 |
| JP2022131758A5 JP2022131758A5 (ja) | 2023-12-12 |
| JP7635482B2 true JP7635482B2 (ja) | 2025-02-26 |
Family
ID=83152831
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021030870A Active JP7635482B2 (ja) | 2021-02-26 | 2021-02-26 | 情報処理装置、方法、およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7635482B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008104130A (ja) | 2006-10-23 | 2008-05-01 | Hitachi Ltd | 映像監視装置および映像監視システム |
| US20170169574A1 (en) | 2015-12-10 | 2017-06-15 | Microsoft Technology Licensing, Llc | Motion detection of object |
| US20170213080A1 (en) | 2015-11-19 | 2017-07-27 | Intelli-Vision | Methods and systems for automatically and accurately detecting human bodies in videos and/or images |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021161365A1 (ja) * | 2020-02-10 | 2021-08-19 | 株式会社 テクノミライ | デジタル・モーションフォーミュラ・セキュリティシステム、方法及びプログラム |
-
2021
- 2021-02-26 JP JP2021030870A patent/JP7635482B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008104130A (ja) | 2006-10-23 | 2008-05-01 | Hitachi Ltd | 映像監視装置および映像監視システム |
| US20170213080A1 (en) | 2015-11-19 | 2017-07-27 | Intelli-Vision | Methods and systems for automatically and accurately detecting human bodies in videos and/or images |
| US20170169574A1 (en) | 2015-12-10 | 2017-06-15 | Microsoft Technology Licensing, Llc | Motion detection of object |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022131758A (ja) | 2022-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11048942B2 (en) | Method and apparatus for detecting a garbage dumping action in real time on video surveillance system | |
| JP3812985B2 (ja) | 自動監視装置 | |
| JP6551512B2 (ja) | 監視システム、監視制御装置、監視方法、およびプログラム | |
| US5243418A (en) | Display monitoring system for detecting and tracking an intruder in a monitor area | |
| US10083376B2 (en) | Human presence detection in a home surveillance system | |
| US20200394384A1 (en) | Real-time Aerial Suspicious Analysis (ASANA) System and Method for Identification of Suspicious individuals in public areas | |
| KR20190046351A (ko) | 침입 탐지방법 및 그 장치 | |
| US20090296989A1 (en) | Method for Automatic Detection and Tracking of Multiple Objects | |
| US20220366570A1 (en) | Object tracking device and object tracking method | |
| Dubuisson et al. | A survey of datasets for visual tracking | |
| JP5279517B2 (ja) | 物体検知装置及び物体検知方法 | |
| CN114140745A (zh) | 施工现场人员属性检测方法、系统、装置及介质 | |
| US10496874B2 (en) | Facial detection device, facial detection system provided with same, and facial detection method | |
| CN110414360A (zh) | 一种异常行为的检测方法及检测设备 | |
| CN115116136B (zh) | 一种异常行为检测方法、装置、介质 | |
| JP7748526B2 (ja) | 誤検出判定装置、方法、およびプログラム | |
| JP2020106970A (ja) | 人検出装置および人検出方法 | |
| JP7214437B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| KR20230051848A (ko) | 위험 영역의 안전사고 예방을 위한 시스템 및 시스템의 동작 방법 | |
| CN111325937B (zh) | 翻越行为检测方法、装置和电子系统 | |
| US10990859B2 (en) | Method and system to allow object detection in visual images by trainable classifiers utilizing a computer-readable storage medium and processing unit | |
| JP7635482B2 (ja) | 情報処理装置、方法、およびプログラム | |
| CN114511930A (zh) | 行为检测方法、装置、电子设备及计算机可读存储介质 | |
| JP7074174B2 (ja) | 識別器学習装置、識別器学習方法およびコンピュータプログラム | |
| Gil-Jiménez et al. | Automatic control of video surveillance camera sabotage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240827 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635482 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |