JP7635235B2 - 車両の軌道を予測するためのシステムおよび方法 - Google Patents
車両の軌道を予測するためのシステムおよび方法 Download PDFInfo
- Publication number
- JP7635235B2 JP7635235B2 JP2022535570A JP2022535570A JP7635235B2 JP 7635235 B2 JP7635235 B2 JP 7635235B2 JP 2022535570 A JP2022535570 A JP 2022535570A JP 2022535570 A JP2022535570 A JP 2022535570A JP 7635235 B2 JP7635235 B2 JP 7635235B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- vehicles
- ego
- lane
- adjacent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/04—Vehicle stop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4046—Behavior, e.g. aggressive or erratic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
-自車および車両のグループの車両の位置、向きおよび速度情報を収集または回収するためのモジュール、
-収集された情報に従って隣接車線を走行する連続する車両のペアごとの動的モデルを推定するためのモジュール、を含む。これにより、同じ交通車線における近くの車両のデータに従って、隣接車両のそれぞれについて正確な動的モデルを取得することができる。
-ある瞬間における各車両の実際の速度および前の瞬間における前記自車の速度に依存するしきい値と、自己回帰外因性計算モデルの誤差とを比較することによって、確立された動的モデルを確認するためのモジュール、
-確認された動的モデルおよび前記車両の初期位置に従って、隣接する車両の動きを予測するためのモジュール、
-隣接する車両の動きの予測および自車の固有受容性センサから生じる情報に従って、自車の動きを予測するためのモジュール、および
-自車および隣接する車両の動きの前記予測、自車の全体的軌道、および例えば、自車が走行している道路の地図から生じる情報に従って、自車による車線変更を決定するためのモジュール、を含む。
A(z)・y(t)=B(z)・u(t-nk)+e(t)
ここで、
zは時間シフト、
nkは遅延、
u(t)は入力データ、この場合、先行する二次車両の速度、
y(t)は出力データ、この場合、主車両の速度、
e(t)は誤差値、および
A(z)およびB(z)は二次多項式である。
A(z)=1+a1・z-1+a2・z-2
B(z)=b1+b2・z-1+b3・z-2
Claims (6)
- 主車線(1)を走行する自車(10)の軌道を決定する方法(50)であって、前記主車線(1)から隣接する車線(2)への前記自車による車線変更が、前記隣接する車線(2)を走行する車両のグループの動的挙動の推定に従って決定され、前記車両のグループ(7)が、前記自車の近くに位置する少なくとも1つの主車両と、前記自車よりも後方に位置する二次車両とを含み、
前記自車(10)および前記車両のグループ(7)の車両(3、4、5、6)の位置(P)、向き(O)、および速度(V)情報が収集され、収集された前記情報に従って、前記隣接する車線(2)を走行する車両のうちの1つの車両と当該車両に連続する車両のペアごとの動的モデルが確立され、
連続する車両のペアごとの前記動的モデルが、自己回帰外因性計算モデルを使用して、考慮される連続する車両の各ペアに対する前記自車の挙動に対応する二次伝達関数を決定することによって取得され、前記自車の挙動は、前記自車(10)の長手方向モデルおよび前記自車(10)の長手方向コントローラに依存する、方法(50)。 - 確立された前記動的モデルが、ある瞬間(t)における各車両の実際の速度(V(t))および前の瞬間(t-1)における前記車両の速度(V(t-1))に依存するしきい値と、前記自己回帰外因性計算モデルの誤差(e(t))とを比較することによって確認される、請求項1に記載の方法(50)。
- 隣接する車両の動きが、確認された前記動的モデルおよび前記車両の初期位置に従って予測され、前記自車(10)の動きが、前記隣接する車両の動きの予測および前記自車(10)の状態を検知する固有受容性センサ(C)から生じる情報に従って決定され、前記自車(10)による車線変更が、前記自車および前記隣接する車両の動きの前記予測ならびに前記自車(10)の全体的軌道(T)に従って決定される、請求項2に記載の方法(50)。
- 前記方法(50)のステップが、車線変更可能性が見出されるまで繰り返される、請求項1から3のいずれか一項に記載の方法(50)。
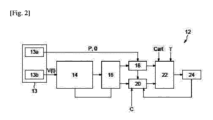
- 隣接する車線(2)を走行する車両のグループの動的挙動の推定に従って、主車線(1)から前記隣接する車線(2)への自車による車線変更を決定するように構成された、前記主車線(1)を走行する自車(10)の軌道を決定するためのシステム(12)であって、前記車両のグループ(7)が、前記自車の近くに位置する少なくとも1つの主車両と、前記自車よりも後方に位置する二次車両とを含み、前記システム(12)が、
前記自車(10)および前記車両のグループ(7)の車両(3、4、5、6)の位置(P)、向き(O)、および速度(V)情報を収集するためのモジュール(13)と、
収集された前記情報に従って、前記隣接する車線(2)を走行する車両のうちの1つの車両と当該車両に連続する車両のペアごとの動的モデルを推定するためのモジュール(14)と、
ある瞬間(t)における各車両の実際の速度(V(t))および前の瞬間(t-1)における前の速度(V(t-1))に依存するしきい値と、自己回帰外因性計算モデルの誤差(e(t))とを比較することによって、確立された前記動的モデルを確認するためのモジュール(16)と、
確認された前記動的モデルおよび前記車両の初期位置に従って、隣接する車両の動きを予測するためのモジュール(18)と、
前記隣接する車両の動きの予測および前記自車(10)の状態を検知する固有受容性センサ(C)から生じる情報に従って、前記自車(10)の動きを決定するためのモジュール(20)と、
前記車両および前記隣接する車両の動きの前記予測ならびに前記自車(10)の全体的軌道(T)に従って前記自車(10)による車線変更を決定するためのモジュールと、を含む、システム(12)。 - 知覚するためのシステム(11)と、請求項5に記載の自車の軌道を決定するためのシステム(12)とを含む、自車両(10)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1914342 | 2019-12-13 | ||
| FR1914342A FR3104518B1 (fr) | 2019-12-13 | 2019-12-13 | Système et procédé de prédiction de la trajectoire d’un véhicule |
| PCT/EP2020/085633 WO2021116345A1 (fr) | 2019-12-13 | 2020-12-10 | Système et procédé de prédiction de la trajectoire d'un véhicule |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023505700A JP2023505700A (ja) | 2023-02-10 |
| JP7635235B2 true JP7635235B2 (ja) | 2025-02-25 |
Family
ID=69903432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022535570A Active JP7635235B2 (ja) | 2019-12-13 | 2020-12-10 | 車両の軌道を予測するためのシステムおよび方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US12145627B2 (ja) |
| EP (1) | EP4072917B1 (ja) |
| JP (1) | JP7635235B2 (ja) |
| KR (1) | KR20220108823A (ja) |
| CN (1) | CN114901535A (ja) |
| FR (1) | FR3104518B1 (ja) |
| WO (1) | WO2021116345A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021214113A1 (de) * | 2021-12-10 | 2023-06-15 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren und Vorrichtung zum Bereitstellen einer Fahrstrategie für ein automatisiertes Fahrzeug für einen vorgegebenen Bereich |
| CN116653963B (zh) * | 2023-07-31 | 2023-10-20 | 福思(杭州)智能科技有限公司 | 车辆变道控制方法、系统和智能驾驶域控制器 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016004425A (ja) | 2014-06-17 | 2016-01-12 | 株式会社豊田中央研究所 | 車線変更支援装置及びプログラム |
| US20170242435A1 (en) | 2016-02-22 | 2017-08-24 | Volvo Car Corporation | Method and system for evaluating inter-vehicle traffic gaps and time instances to perform a lane change maneuver |
| JP2017165201A (ja) | 2016-03-15 | 2017-09-21 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| JP2018522295A (ja) | 2015-04-30 | 2018-08-09 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツングConti Temic microelectronic GmbH | 動力車両における車線変更を実施するための方法 |
| WO2019204053A1 (en) | 2018-04-05 | 2019-10-24 | TuSimple | System and method for automated lane change control for autonomous vehicles |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| MY161720A (en) | 2013-10-11 | 2017-05-15 | Nissan Motor | Travel control device and travel control method |
| US9937860B1 (en) * | 2016-09-26 | 2018-04-10 | Hyundai America Technical Center, Inc. | Method for detecting forward collision |
| CN108831181A (zh) * | 2018-05-04 | 2018-11-16 | 东南大学 | 一种用于公交车辆行程时间预测的模型建立方法及系统 |
| CN109866752B (zh) * | 2019-03-29 | 2020-06-05 | 合肥工业大学 | 基于预测控制的双模式并行车辆轨迹跟踪行驶系统的方法 |
-
2019
- 2019-12-13 FR FR1914342A patent/FR3104518B1/fr active Active
-
2020
- 2020-12-10 CN CN202080089838.6A patent/CN114901535A/zh active Pending
- 2020-12-10 EP EP20820225.9A patent/EP4072917B1/fr active Active
- 2020-12-10 KR KR1020227024170A patent/KR20220108823A/ko active Pending
- 2020-12-10 WO PCT/EP2020/085633 patent/WO2021116345A1/fr not_active Ceased
- 2020-12-10 JP JP2022535570A patent/JP7635235B2/ja active Active
- 2020-12-10 US US17/784,531 patent/US12145627B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016004425A (ja) | 2014-06-17 | 2016-01-12 | 株式会社豊田中央研究所 | 車線変更支援装置及びプログラム |
| JP2018522295A (ja) | 2015-04-30 | 2018-08-09 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツングConti Temic microelectronic GmbH | 動力車両における車線変更を実施するための方法 |
| US20170242435A1 (en) | 2016-02-22 | 2017-08-24 | Volvo Car Corporation | Method and system for evaluating inter-vehicle traffic gaps and time instances to perform a lane change maneuver |
| JP2017165201A (ja) | 2016-03-15 | 2017-09-21 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| WO2019204053A1 (en) | 2018-04-05 | 2019-10-24 | TuSimple | System and method for automated lane change control for autonomous vehicles |
Also Published As
| Publication number | Publication date |
|---|---|
| US12145627B2 (en) | 2024-11-19 |
| JP2023505700A (ja) | 2023-02-10 |
| FR3104518A1 (fr) | 2021-06-18 |
| EP4072917B1 (fr) | 2025-08-06 |
| EP4072917A1 (fr) | 2022-10-19 |
| KR20220108823A (ko) | 2022-08-03 |
| FR3104518B1 (fr) | 2022-06-24 |
| US20230015485A1 (en) | 2023-01-19 |
| WO2021116345A1 (fr) | 2021-06-17 |
| CN114901535A (zh) | 2022-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9229453B1 (en) | Unified motion planner for autonomous driving vehicle in avoiding the moving obstacle | |
| CN102076541B (zh) | 用于自动车道居中和车道变换控制系统的路径生成算法 | |
| US9227632B1 (en) | Method of path planning for evasive steering maneuver | |
| JP4173292B2 (ja) | 車両用運転操作補助装置 | |
| CN110877610B (zh) | 碰撞回避装置 | |
| CN103935361B (zh) | 用于自主的车道变换、经过和超越行为的有效数据流算法 | |
| JP5130638B2 (ja) | 回避操作算出装置、回避制御装置、各装置を備える車両、回避操作算出方法および回避制御方法 | |
| JP5098584B2 (ja) | 車両用運転支援装置 | |
| JP7667800B2 (ja) | 経路制御モジュール、関連する経路制御デバイスおよび関連する方法 | |
| JP6515823B2 (ja) | 車線変更支援装置 | |
| CN113286732A (zh) | 用于确定机动车辆的可能轨迹的混合方法的控制系统和控制方法 | |
| CN114302839B (zh) | 用于确定机动车辆的避让路径的方法 | |
| CN101636304A (zh) | 用于计算车辆的驾驶策略所用的避撞轨迹的方法 | |
| JP2007269312A (ja) | 車両用運転操作補助装置 | |
| KR20190045308A (ko) | 차량 판정 방법, 주행 경로 보정 방법, 차량 판정 장치, 및 주행 경로 보정 장치 | |
| JP5282590B2 (ja) | 車両用運転支援装置および車両用運転支援方法 | |
| JP5239947B2 (ja) | 運転操作支援装置及び運転操作支援方法 | |
| JP7635235B2 (ja) | 車両の軌道を予測するためのシステムおよび方法 | |
| JP5359289B2 (ja) | 車両用運転支援装置 | |
| JP4999762B2 (ja) | 車両の接触回避支援装置 | |
| JP6898645B2 (ja) | 自動操舵システム | |
| EP3626570B1 (en) | Driving assistance method and driving assistance apparatus | |
| CN113840762B (zh) | 用于操作自主车辆的方法 | |
| JP4853068B2 (ja) | 車両用支援制御装置 | |
| JP4396281B2 (ja) | 車両用運転操作補助装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240820 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635235 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |