JP7602011B2 - センサ装置 - Google Patents
センサ装置 Download PDFInfo
- Publication number
- JP7602011B2 JP7602011B2 JP2023505570A JP2023505570A JP7602011B2 JP 7602011 B2 JP7602011 B2 JP 7602011B2 JP 2023505570 A JP2023505570 A JP 2023505570A JP 2023505570 A JP2023505570 A JP 2023505570A JP 7602011 B2 JP7602011 B2 JP 7602011B2
- Authority
- JP
- Japan
- Prior art keywords
- scanning
- scanning unit
- unit
- scanning range
- reference position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 claims description 57
- 238000010586 diagram Methods 0.000 description 22
- 238000003384 imaging method Methods 0.000 description 18
- 238000001514 detection method Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000002310 reflectometry Methods 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
- G01S7/4972—Alignment of sensor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/105—Scanning systems with one or more pivoting mirrors or galvano-mirrors
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optics & Photonics (AREA)
- Electromagnetism (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Description
走査部と、
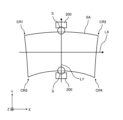
前記走査部の走査範囲に照射されるビームの少なくとも一部を反射する複数の反射部と、
を備え、
前記複数の反射部が前記走査範囲のうちの少なくとも4角に位置している、センサ装置である。
走査部と、
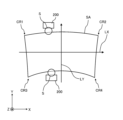
前記走査部の走査範囲に照射されるビームの少なくとも一部を反射する複数の反射部と、
を備え、
前記複数の反射部が前記走査範囲のうちの少なくとも両側に位置しており、
前記複数の反射部が、前記走査部の前記走査範囲の走査の開始位置に照射される前記ビームと、前記走査部の前記走査範囲の走査の終了位置に照射される前記ビームと、は異なる前記ビームの少なくとも一部を反射する、センサ装置である。
12 筐体
50A 測定系
50B 測定系
50C 測定系
50D 測定系
100 走査部
102 反射面
102p ピッチ軸
102r ロール軸
102y ヨー軸
200 反射部
310 測定部
320 補正部
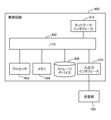
400 集積回路
402 バス
404 プロセッサ
406 メモリ
408 ストレージデバイス
410 入出力インタフェース
412 ネットワークインタフェース
500A スクリーン
500B スクリーン
500C スクリーン
500Da 第1スクリーン
500Db 第2スクリーン
502C 第1領域
502Da 貫通孔
504C 第2領域
510A 撮像部
510B 撮像部
AR1 第1の破線矢印
AR2 第2の破線矢印
CR1 第1角
CR2 第2角
CR3 第3角
CR4 第4角
LX 第1仮想線
LXA 第1仮想線
LY 第2仮想線
LYA 第2仮想線
S スポット
SA 走査範囲
X 第1方向
Y 第2方向
Z 第3方向
Claims (3)
- 走査部と、
前記走査部の走査範囲に照射されるビームの少なくとも一部を反射する複数の反射部と、
を備え、
前記複数の反射部が前記走査範囲のうちの少なくとも4角に位置しており、
前記複数の反射部はそれぞれ、前記走査範囲の角を構成する2辺の延長線が、少なくとも1つの同じ反射部に重なるように配置されている、センサ装置。 - 走査部と、
前記走査部の走査範囲に照射されるビームの少なくとも一部を反射する複数の反射部と、
を備え、
前記走査範囲はスポットの中心が通過する軌跡の範囲であり、
前記複数の反射部が前記走査範囲のうちの少なくとも両側に位置しており、
前記複数の反射部はいずれも、前記走査部の位置が基準位置にある場合の前記走査範囲の外側に位置しており、
前記走査部の位置が基準位置にある場合に、前記複数の反射部はいずれもスポットの一部が重なる位置に配置されており、
前記複数の反射部が、前記走査部の前記走査範囲の走査の開始位置に照射される前記ビームと、前記走査部の前記走査範囲の走査の終了位置に照射される前記ビームと、は異なる前記ビームの少なくとも一部を反射する、センサ装置。 - 請求項1又は2に記載のセンサ装置において、
前記複数の反射部によって反射された複数の前記ビームの反射量の関係を用いて前記走査部の位置の基準位置からのずれを測定する測定部をさらに備えるセンサ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024212064A JP2025023285A (ja) | 2021-03-10 | 2024-12-05 | センサ装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021038050 | 2021-03-10 | ||
| JP2021038050 | 2021-03-10 | ||
| PCT/JP2022/009948 WO2022191174A1 (ja) | 2021-03-10 | 2022-03-08 | センサ装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024212064A Division JP2025023285A (ja) | 2021-03-10 | 2024-12-05 | センサ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022191174A1 JPWO2022191174A1 (ja) | 2022-09-15 |
| JP7602011B2 true JP7602011B2 (ja) | 2024-12-17 |
Family
ID=83228045
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023505570A Active JP7602011B2 (ja) | 2021-03-10 | 2022-03-08 | センサ装置 |
| JP2024212064A Pending JP2025023285A (ja) | 2021-03-10 | 2024-12-05 | センサ装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024212064A Pending JP2025023285A (ja) | 2021-03-10 | 2024-12-05 | センサ装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240142581A1 (ja) |
| EP (1) | EP4306992A4 (ja) |
| JP (2) | JP7602011B2 (ja) |
| WO (1) | WO2022191174A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000075031A (ja) | 1998-08-27 | 2000-03-14 | Omron Corp | 測距装置の2次元軸調整方法 |
| JP2002107452A (ja) | 2000-10-02 | 2002-04-10 | Nippon Signal Co Ltd:The | 2次元走査型光レーダセンサ |
| JP2010044050A (ja) | 2008-07-14 | 2010-02-25 | Ihi Corp | レーザレーダの姿勢認識方法及びレーザレーダ |
| US20150265853A1 (en) | 2012-08-31 | 2015-09-24 | Reflex Imaging Limited | Position Determination |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6678705B2 (ja) | 2018-07-24 | 2020-04-08 | 三菱電機株式会社 | 距離測定装置 |
| JP7192718B2 (ja) | 2019-09-02 | 2022-12-20 | 株式会社ダイフク | 物品搬送設備 |
-
2022
- 2022-03-08 WO PCT/JP2022/009948 patent/WO2022191174A1/ja not_active Ceased
- 2022-03-08 JP JP2023505570A patent/JP7602011B2/ja active Active
- 2022-03-08 EP EP22767128.6A patent/EP4306992A4/en active Pending
- 2022-03-08 US US18/281,261 patent/US20240142581A1/en active Pending
-
2024
- 2024-12-05 JP JP2024212064A patent/JP2025023285A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000075031A (ja) | 1998-08-27 | 2000-03-14 | Omron Corp | 測距装置の2次元軸調整方法 |
| JP2002107452A (ja) | 2000-10-02 | 2002-04-10 | Nippon Signal Co Ltd:The | 2次元走査型光レーダセンサ |
| JP2010044050A (ja) | 2008-07-14 | 2010-02-25 | Ihi Corp | レーザレーダの姿勢認識方法及びレーザレーダ |
| US20150265853A1 (en) | 2012-08-31 | 2015-09-24 | Reflex Imaging Limited | Position Determination |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022191174A1 (ja) | 2022-09-15 |
| EP4306992A1 (en) | 2024-01-17 |
| EP4306992A4 (en) | 2025-03-12 |
| JPWO2022191174A1 (ja) | 2022-09-15 |
| US20240142581A1 (en) | 2024-05-02 |
| JP2025023285A (ja) | 2025-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111742241B (zh) | 光测距装置 | |
| US6862097B2 (en) | Three-dimensional shape measuring method, and three-dimensional shape measuring apparatus | |
| JP2014020889A (ja) | 物体検出装置 | |
| JP5267786B2 (ja) | レーザレーダ及びレーザレーダによる境界監視方法 | |
| JP2510786B2 (ja) | 物体の形状検出方法及びその装置 | |
| JP6259664B2 (ja) | 走査光学系、光走査装置、及び距離測定装置 | |
| JP7157386B2 (ja) | レーザーレーダー用の走査型の光学系及びレーザーレーダー装置 | |
| JP7602011B2 (ja) | センサ装置 | |
| JP2022138265A (ja) | センサ装置、補正方法及びプログラム | |
| JP2014071028A (ja) | レーザレーダ装置 | |
| CN116685866A (zh) | 用于校准激光扫描仪的方法和技术设施 | |
| JP2025028363A (ja) | センサ装置 | |
| JP6839335B2 (ja) | 光走査装置 | |
| JP2021110698A (ja) | 光学式三次元形状測定装置 | |
| CN215526099U (zh) | 光扫描装置及激光雷达 | |
| JP2024134386A (ja) | ビーム走査システム | |
| CN119487360A (zh) | 距离测定装置 | |
| CN114981681B (zh) | 用于校准激光扫描仪的设备和方法 | |
| JP7738089B2 (ja) | センサ装置 | |
| JP7635687B2 (ja) | 測距装置 | |
| US20220107397A1 (en) | Lidar system | |
| CN118602981A (zh) | 光学式位移计 | |
| WO2024018824A1 (ja) | 走査光学装置 | |
| CN120077296A (zh) | 光学传感器、受光模块 | |
| CN115900555A (zh) | 测量装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230906 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240827 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7602011 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |