JP7581330B2 - 血管内の特性を判断するための方法およびシステム - Google Patents
血管内の特性を判断するための方法およびシステム Download PDFInfo
- Publication number
- JP7581330B2 JP7581330B2 JP2022511015A JP2022511015A JP7581330B2 JP 7581330 B2 JP7581330 B2 JP 7581330B2 JP 2022511015 A JP2022511015 A JP 2022511015A JP 2022511015 A JP2022511015 A JP 2022511015A JP 7581330 B2 JP7581330 B2 JP 7581330B2
- Authority
- JP
- Japan
- Prior art keywords
- determining
- velocity
- acceleration
- characteristic
- blood vessel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/026—Measuring blood flow
- A61B5/0265—Measuring blood flow using electromagnetic means, e.g. electromagnetic flowmeter
- A61B5/027—Measuring blood flow using electromagnetic means, e.g. electromagnetic flowmeter using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/313—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes
- A61B1/3137—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes for examination of the interior of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/02007—Evaluating blood vessel condition, e.g. elasticity, compliance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/02028—Determining haemodynamic parameters not otherwise provided for, e.g. cardiac contractility or left ventricular ejection fraction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/026—Measuring blood flow
- A61B5/0265—Measuring blood flow using electromagnetic means, e.g. electromagnetic flowmeter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/03—Measuring fluid pressure within the body other than blood pressure, e.g. cerebral pressure ; Measuring pressure in body tissues or organs
- A61B5/036—Measuring fluid pressure within the body other than blood pressure, e.g. cerebral pressure ; Measuring pressure in body tissues or organs by means introduced into body tracts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration or pH-value ; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid or cerebral tissue
- A61B5/14503—Measuring characteristics of blood in vivo, e.g. gas concentration or pH-value ; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid or cerebral tissue invasive, e.g. introduced into the body by a catheter or needle or using implanted sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6867—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive specially adapted to be attached or implanted in a specific body part
- A61B5/6869—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6867—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive specially adapted to be attached or implanted in a specific body part
- A61B5/6876—Blood vessel
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/303—Surgical robots specifically adapted for manipulations within body lumens, e.g. within lumen of gut, spine, or blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/374—NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3937—Visible markers
- A61B2090/3941—Photoluminescent markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/397—Markers, e.g. radio-opaque or breast lesions markers electromagnetic other than visible, e.g. microwave
- A61B2090/3975—Markers, e.g. radio-opaque or breast lesions markers electromagnetic other than visible, e.g. microwave active
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0223—Magnetic field sensors
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Cardiology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Physiology (AREA)
- Optics & Photonics (AREA)
- Vascular Medicine (AREA)
- Robotics (AREA)
- Radiology & Medical Imaging (AREA)
- Hematology (AREA)
- Electromagnetism (AREA)
- Human Computer Interaction (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
Description
-要素を血管または心臓に配置するステップと、
-要素に作用する推進力を判断するステップと、
-要素の有効加速度および有効速度の少なくとも1つ、特に有効加速度および有効速度の両方を判断するステップと、
-推進力と、要素の有効加速度および有効速度の少なくとも1つ、特に要素の有効加速度および有効速度の両方とに基づいて、要素の近隣媒体の少なくとも1つの特性を判断ステップとを含む。
推進力は、典型的には、特に明記しない限り、患者の身体とのいかなる相互作用もない場合に要素に及ぼされる総力として理解されるものとする。例えば、要素が磁性であり、磁界によって作動される場合、推進力は、血流、または身体内の摩擦、血流、もしくは血栓からの閉塞等の身体的機能による他の力を考慮に入れることなく、磁界によって要素に及ぼされる力である。同様に、要素がプロペラまたはジェットなどの自己推進手段を含む場合、推進力は、この自己推進手段によって及ぼされる力となるであろう。自己推進手段と磁界との組み合わせが使用される場合、推進力は、これらの力の両方を含む。要素の所与の質量に対する推進力から理論上の加速度および速度を計算することが可能である。
好ましくは、本方法は、近隣媒体の少なくとも1つの特性を位置または時間の関数としてメモリに保存するステップをさらに含む。これは、1回のセッション中に血管内の複数の位置を分析することを可能にする。特に、データは、続いて、1次元、2次元、または3次元の特性マップを作成するように分析されることができる。例えば、血管の狭窄または動脈瘤は、本発明による方法により、前記血管の長手方向軸に沿って判断することができる。狭窄または動脈瘤のレベルが判断され、複数の点で保存される場合、長手方向軸に沿った狭窄または動脈瘤を示すグラフを得ることができる。同様に、データは、2次元または3次元で収集されてもよい。
Claims (18)
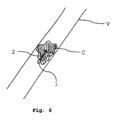
- 患者の血管または心臓(V)における特性を判断するためのシステムであって、
-血管または心臓(V)に配置される要素(1)と、
-前記要素に作用する推進力(2)を判断するための手段と、
-前記要素(1)の加速度(3)および速度(4)の少なくとも1つ、好ましくは加速度(3)および速度(4)を判断するための手段と、
-前記推進力(2)と、前記要素(1)の加速度(3)および速度(4)のうちの少なくとも1つ、好ましくは加速度(3)および速度(4)とに基づいて、前記要素(1)の近隣媒体の少なくとも1つの特性を判断するための手段とを備える、システム。 - 患者の血管または心臓(V)における特性を判断するためのシステムの作動方法であって、前記システムは、
-血管または心臓(V)に配置される要素(1)と、
-前記要素に作用する推進力(2)を判断するための手段と、
-前記要素(1)の加速度(3)および速度(4)の少なくとも1つを判断するための手段と、
-前記推進力(2)と、前記要素(1)の加速度(3)および速度(4)のうちの少なくとも1つとに基づいて、前記要素(1)の近隣媒体の少なくとも1つの特性を判断するための手段とを備え、前記システムは、
-血管または心臓(V)に配置される前記要素(1)に作用する推進力(2)を判断するステップと、
-前記要素(1)の加速度(3)および速度(4)の少なくとも1つを判断するステップと、
-前記推進力(2)と、前記要素(1)の加速度(3)および速度(4)のうちの少なくとも1つとに基づいて、前記要素(1)の近隣媒体の少なくとも1つの特性を判断するステップとを実行する、方法。 - 前記推進力(2)は、前記要素(1)に含まれるセンサ(6)によって測定される、請求項2に記載の方法。
- 前記システムは、特にX線撮像、MRI、コンピュータ断層撮影、PET、および超音波画像化のうちの1つの撮像技術によって、前記要素(1)が位置する患者の領域を撮像するステップをさらに実行する、請求項2または3に記載の方法。
- 前記システムは、前記近隣媒体の前記少なくとも1つの特性を、追加的に前記撮像データに基づいて判断する、請求項4に記載の方法。
- 前記システムは、前記要素(1)の位置を判断するステップをさらに実行する、請求項4に記載の方法。
- 前記システムは、前記位置を、前記撮像技術によって判断する、請求項6に記載の方法。
- 前記システムは、前記位置および/または時間の関数として前記近隣媒体の前記少なくとも1つの特性をメモリ(15)に保存するステップをさらに実行する、請求項6に記載の方法。
- 前記近隣媒体の前記少なくとも1つの特性を計算するステップは、ソフトウェアコードを実行するコンピュータによって実行される、請求項2から請求項8のいずれか1項に記載の方法。
- 前記近隣媒体の前記少なくとも1つの特性は、機械的特性、血行動態特性、解剖学的特性、および組織学的特性のうちの1つである、請求項2から請求項9のいずれか1項に記載の方法。
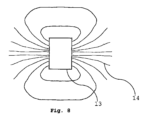
- 前記血管または前記心臓(V)内に配置された前記要素(1)は、磁気要素(1)を含み、前記推進力(2)を判断するステップは、前記システムによって磁界(14)の磁界強度を判断するステップを含む、請求項2から請求項10のいずれか1項に記載の方法。
- 前記システムは、前記要素(1)に作用する前記推進力(2)に基づいて前記要素(1)の理論上の加速度または速度を計算するステップをさらに実行する、請求項4に記載の方法。
- 前記要素(1)の加速度または速度を計算するステップは前記システムによって実行され、さらに、前記要素(1)の位置および前記撮像ステップで取得された撮像データに基づく、請求項12に記載の方法。
- 前記システムは、前記要素(1)の周囲の液体の流速を測定するステップをさらに実行し、前記システムは、加えて、前記流速(9)に基づいて、前記近隣媒体の前記少なくとも1つの特性の判断する、請求項2から請求項13のいずれか1項に記載の方法。
- 前記システムは、前記要素上もしくは前記患者の体内の所定の位置に配置された少なくとも1つの検出器またはマーカ(10)によって前記要素(1)を位置特定するステップをさらに実行する、請求項2から請求項14のいずれか1項に記載の方法。
- 請求項1に記載のシステムを用いて患者の体内の要素(1)の近隣媒体を分析するためのコンピュータプログラム製品であって、コンピュータ上で実行されると、推進力(2)と、前記要素(1)の加速度(3)および速度(4)のうちの少なくとも1つとに基づいて、前記要素(1)の近隣媒体の少なくとも1つの特性を判断するステップを実行するように適合されたソフトウェアコードを備える、コンピュータプログラム製品。
- 血管または心臓(V)の特性を判断するためのシステムであって、体液によって運ばれおよび/または体液中で能動的に移動する要素(1)と、測定ユニット(11)と、計算ユニット(12)とを備え、前記測定ユニット(11)は、前記要素(1)の加速度(3)および速度(4)の少なくとも1つを判断するように適合され、前記計算ユニットは、請求項2~14のいずれか1つに従う方法のステップを実行することによって、前記血管(V)の少なくとも1つの特性を判断するように適合される、システム。
- 前記要素(1)が位置する患者の身体の領域を撮像するように適合される撮像装置(7)をさらに備える、請求項17に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19315100.8 | 2019-08-21 | ||
| EP19315100.8A EP3782543A1 (en) | 2019-08-21 | 2019-08-21 | Method and system for determining properties in a vessel |
| PCT/EP2020/073457 WO2021032869A1 (en) | 2019-08-21 | 2020-08-21 | Method and system for determining properties in a vessel |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022545232A JP2022545232A (ja) | 2022-10-26 |
| JPWO2021032869A5 JPWO2021032869A5 (ja) | 2023-07-04 |
| JP7581330B2 true JP7581330B2 (ja) | 2024-11-12 |
Family
ID=67953725
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022511015A Active JP7581330B2 (ja) | 2019-08-21 | 2020-08-21 | 血管内の特性を判断するための方法およびシステム |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US12257040B2 (ja) |
| EP (2) | EP3782543A1 (ja) |
| JP (1) | JP7581330B2 (ja) |
| KR (1) | KR20220052337A (ja) |
| CN (1) | CN114222540B (ja) |
| AU (1) | AU2020333920A1 (ja) |
| BR (1) | BR112022000947A2 (ja) |
| CA (1) | CA3147453A1 (ja) |
| IL (1) | IL290611A (ja) |
| MX (1) | MX2022002065A (ja) |
| WO (1) | WO2021032869A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4124312A1 (en) * | 2021-07-26 | 2023-02-01 | Artedrone | System and method for moving a medical device for treating or diagnosing a patient |
| TW202241358A (zh) * | 2021-01-21 | 2022-11-01 | 法商亞特德隆公司 | 用於移動用來治療或診斷病患之醫療裝置的系統及方法 |
| CN115154847A (zh) * | 2022-08-12 | 2022-10-11 | 深圳市爱博医疗机器人有限公司 | 细长型医疗器械的操作装置及测力方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060152309A1 (en) | 2005-01-11 | 2006-07-13 | Mintchev Martin P | Magnetic levitation of intraluminal microelectronic capsule |
| WO2013172312A1 (ja) | 2012-05-14 | 2013-11-21 | オリンパスメディカルシステムズ株式会社 | カプセル型医療装置及び医療システム |
| JP2014000431A (ja) | 2006-08-11 | 2014-01-09 | Koninklijke Philips Nv | 脳血流画像化、及びマイクロバブルを用いた血餅溶解をする超音波システム |
| US20140253114A1 (en) | 2013-02-26 | 2014-09-11 | Mir Behrad KHAMESEE | System and method for providing force information in a magnetic field environment |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2061216C1 (ru) * | 1994-03-05 | 1996-05-27 | Ивановский Инженерно-Строительный Институт | Способ измерения вязкости жидкости |
| US5419325A (en) * | 1994-06-23 | 1995-05-30 | General Electric Company | Magnetic resonance (MR) angiography using a faraday catheter |
| US5833603A (en) * | 1996-03-13 | 1998-11-10 | Lipomatrix, Inc. | Implantable biosensing transponder |
| US7962194B2 (en) * | 2003-04-15 | 2011-06-14 | Polyvalor, Limited Partnership | Method and system for propelling and controlling displacement of a microrobot in a blood vessel |
| US20070244520A1 (en) | 2004-04-19 | 2007-10-18 | Searete Llc | Lumen-traveling biological interface device and method of use |
| US20120035434A1 (en) * | 2006-04-12 | 2012-02-09 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Control of a lumen traveling device in a body tube tree |
| KR101272156B1 (ko) * | 2011-08-31 | 2013-06-05 | 전남대학교산학협력단 | 혈관치료용 마이크로로봇시스템 및 그 제어방법 |
| JP5020403B1 (ja) * | 2011-11-28 | 2012-09-05 | リオン株式会社 | 振動式物性測定装置及び方法 |
| US20170119235A1 (en) * | 2015-10-29 | 2017-05-04 | Elwha Llc | Lumen traveling device |
| US20190298311A1 (en) * | 2016-10-07 | 2019-10-03 | Koninklijke Philips N.V. | Intravascular flow determination |
-
2019
- 2019-08-21 EP EP19315100.8A patent/EP3782543A1/en not_active Withdrawn
-
2020
- 2020-08-21 KR KR1020227009008A patent/KR20220052337A/ko not_active Withdrawn
- 2020-08-21 JP JP2022511015A patent/JP7581330B2/ja active Active
- 2020-08-21 AU AU2020333920A patent/AU2020333920A1/en not_active Abandoned
- 2020-08-21 US US17/636,669 patent/US12257040B2/en active Active
- 2020-08-21 CA CA3147453A patent/CA3147453A1/en not_active Abandoned
- 2020-08-21 WO PCT/EP2020/073457 patent/WO2021032869A1/en not_active Ceased
- 2020-08-21 MX MX2022002065A patent/MX2022002065A/es unknown
- 2020-08-21 CN CN202080056972.6A patent/CN114222540B/zh active Active
- 2020-08-21 EP EP20757912.9A patent/EP4017347A1/en active Pending
- 2020-08-21 BR BR112022000947A patent/BR112022000947A2/pt not_active IP Right Cessation
-
2022
- 2022-02-14 IL IL290611A patent/IL290611A/en unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060152309A1 (en) | 2005-01-11 | 2006-07-13 | Mintchev Martin P | Magnetic levitation of intraluminal microelectronic capsule |
| JP2014000431A (ja) | 2006-08-11 | 2014-01-09 | Koninklijke Philips Nv | 脳血流画像化、及びマイクロバブルを用いた血餅溶解をする超音波システム |
| WO2013172312A1 (ja) | 2012-05-14 | 2013-11-21 | オリンパスメディカルシステムズ株式会社 | カプセル型医療装置及び医療システム |
| US20140253114A1 (en) | 2013-02-26 | 2014-09-11 | Mir Behrad KHAMESEE | System and method for providing force information in a magnetic field environment |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022545232A (ja) | 2022-10-26 |
| BR112022000947A2 (pt) | 2022-06-14 |
| WO2021032869A1 (en) | 2021-02-25 |
| CA3147453A1 (en) | 2021-02-25 |
| US12257040B2 (en) | 2025-03-25 |
| AU2020333920A1 (en) | 2022-03-03 |
| CN114222540B (zh) | 2025-11-07 |
| KR20220052337A (ko) | 2022-04-27 |
| IL290611A (en) | 2022-04-01 |
| US20220280050A1 (en) | 2022-09-08 |
| EP4017347A1 (en) | 2022-06-29 |
| CN114222540A (zh) | 2022-03-22 |
| EP3782543A1 (en) | 2021-02-24 |
| MX2022002065A (es) | 2022-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11786318B2 (en) | Intelligent real-time tool and anatomy visualization in 3D imaging workflows for interventional procedures | |
| Heunis et al. | Flexible instruments for endovascular interventions: Improved magnetic steering, actuation, and image-guided surgical instruments | |
| JP6129750B2 (ja) | 血管内の装置の形状を用いた血管画像の非剛体モーフィング | |
| JP7581330B2 (ja) | 血管内の特性を判断するための方法およびシステム | |
| EP2744391B1 (en) | Shape sensing assisted medical procedure | |
| Yang et al. | Ultrasound-guided catheterization using a driller-tipped guidewire with combined magnetic navigation and drilling motion | |
| US20090118620A1 (en) | System and method for tracking an ultrasound catheter | |
| US12016652B2 (en) | System and method for real-time creation of cardiac electro-physiology signals in the heart | |
| US20100063384A1 (en) | Local intra-body delivery system | |
| Kagadis et al. | Emerging technologies for image guidance and device navigation in interventional radiology | |
| CN105517489B (zh) | 导航系统 | |
| CN107432766A (zh) | 一种精准微创手术导航系统 | |
| EP3206620B1 (en) | System for planning the introduction of a needle in a patient's body | |
| CN112236099A (zh) | 执行和评估程序的系统和方法 | |
| HK40071782B (zh) | 用於在脉管内确定特性的方法和系统 | |
| HK40071782A (zh) | 用於在脉管内确定特性的方法和系统 | |
| JPWO2021032869A5 (ja) | ||
| Fullerton et al. | The influence of stents on the performance of an ultrasonic navigation system for endovascular procedures |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230626 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240220 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240517 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240903 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20241003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241030 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7581330 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |