本発明に係る電気掃除機の実施形態について、図1から図8を参照して説明する。
図1は、本発明の実施形態に係る電気掃除機の斜視図である。
図1に示すように、本実施形態に係る電気掃除機1は、例えばスティック型であって、ハンディー型でもある。電気掃除機1は、手持ち操作可能な掃除機本体2と、掃除機本体2に着脱可能な延長管3と、延長管3に着脱可能な吸込口体5と、を備えている。
なお、使用者が電気掃除機1を手持ちし、かつ吸込口体5を被接触面としての床面に接地させた状態では、図1は、使用者の左斜め前方から電気掃除機1を見た図に相当する。
また、電気掃除機1は、延長管3および吸込口体5を取り外した、掃除機本体2のみの形態でハンディー型電気掃除機としても利用できる。つまり、掃除機本体2は、単独でハンディー型電気掃除機として利用できる。また、電気掃除機1は、延長管3および吸込口体5に代えて、延長管3よりも極めて短いノズルを装着して使用することもできる。
掃除機本体2は、把手部11を有する本体ケース12と、本体ケース12に収容されて吸込負圧を生じさせる電動送風機13と、本体ケース12に着脱可能に装着され、かつ電動送風機13の吸込側に流体的に接続される分離集塵部15と、分離集塵部15を介して電動送風機13の吸込側に流体的に接続される吸込管16と、主に電動送風機13を制御する本体制御部17と、本体ケース12に着脱可能に装着される二次電池18と、本体ケース12に分離集塵部15を着脱可能に保持する保持機構と、を備えている。
掃除機本体2は、二次電池18が蓄える電力によって電動送風機13を駆動させ、電動送風機13の駆動によって負圧を発生させ、発生した吸込負圧を分離集塵部15に作用させる。分離集塵部15に作用する吸込負圧は、吸込管16、延長管3、および吸込口体5に順次に作用する。吸込口体5に達した吸込負圧は、吸込口体5の吸込口19に作用する。吸込口19に作用する吸込負圧は、床面から塵埃を含んだ空気(以下、「含塵空気」と呼ぶ。)を吸込口19に吸い込む。吸込口19に吸い込まれた含塵空気は、吸込口体5、延長管3、および吸込管16を通じて分離集塵部15へ流入する。分離集塵部15は、吸込負圧によって吸い込まれる含塵空気から塵埃を分離し、分離後の塵埃を捕集し、蓄積するとともに塵埃が分離された空気を電動送風機13へ送る。電動送風機13は、塵埃が分離された空気を本体ケース12外へ排気する。
なお、電気掃除機1および掃除機本体2は、掃除機本体2を手に持つ使用者によって、様々な姿勢で利用される。そこで、図1中、実線矢印P方向視を平面視(上面視)とし、実線矢印Pの反対方向視を底面視とする。図1中、実線矢印F方向視を正面視(前面視)とし、実線矢印Fの反対方向視を背面視とする。図1中、実線矢印L方向視を左側面視とし、実線矢印Lの反対方向視を右側面視とする。つまり、延長管3が使用者の前方へ向かって水平に突出する姿勢で電気掃除機1を使用者が持っている場合には、電気掃除機1の前後、上下、左右は、使用者のそれに一致する。
本体ケース12は、電動送風機13、および本体制御部17が実装される制御回路板21を収容している。本体ケース12は、延長管3の延長線上に配置され、かつ延長管3の延長線に沿って延びる柱状の前部12aと、前部12aから下斜め後方へ垂れ下がる中央部12bと、中央部12bの背面の下半部から後方へ延びる筒状の後部12cと、中央部12bの背面の上半部から後方へ延び、円弧形状に湾曲して後部12cの上面の後端に繋がる把手部11と、を備えている。
また、本体ケース12は、二次電池18へ充電電力を導く充電ソケットを備えている。充電ソケットは、充電回路を介して二次電池18に接続されている。
さらに、本体ケース12は、把手部11を握った使用者が、その手指を動かせる範囲に配置される入力部22を備えている。
前部12aと中央部12bとは、協働して分離集塵部15を着脱可能に保持している。分離集塵部15は、全体で筒状の外観を有している。前部12aと中央部12bとは、分離集塵部15の中心線Cを延長管3の中心線の延長線に平行させて分離集塵部15を保持している。延長管3および分離集塵部15が本体ケース12に装着されている状態では、延長管3の中心線の延長線および分離集塵部15の中心線Cは、本体ケース12を左右に実質的に均等に分断する中央縦断面上に配置されている。この中央縦断面は、長手状の前部12aの中心線および筒状の分離集塵部15の中心線を通る。つまり、長手状の前部12aと筒状の分離集塵部15とは、中心線が平行するように併設されている。
本体ケース12の前部12aは、吸込管16を収容している。吸込管16は、延長管3の長手方向、つまり延長管3の延伸方向の延長上に配置されて管状に延びている。
本体ケース12の後部12cは、電動送風機13および制御回路板21を収容している。後部12cは、電動送風機13の排気を本体ケース12内から吐出させる排気口25を有している。
本体ケース12の中央部12bは、前部12aに併設される分離集塵部15の後端部の一部を覆い隠すように保持し、かつ分離集塵部15と電動送風機13とを繋ぐ風路(図示省略)を収容している。中央部12bは、実質的に直線状に延びる前部12aの後端部に連接して本体ケース12の下斜め後方へ向かって膨らんでいる。中央部12bは、本体ケース12の後方へ向かって後ろ下がりに傾斜する外観を有している。
吸込管16は、本体ケース12の前部12a内に収容されて本体ケース12に支持されている。本体ケース12に分離集塵部15が装着された状態では、吸込管16は、分離集塵部15に平行に並ぶ。吸込管16は、実質的に屈曲なく真っ直ぐに延びる直管である。吸込管16の中心線に沿う方向、吸込管16の延伸方向、吸込管16の長手方向は、実質的に同意であり、本体ケース12の前後方向に実質的に一致している。
吸込管16は、延長管3を着脱可能な継手構造を備えている。この継手構造は、吸込管16の開口端部に設けられている。吸込管16は、掃除機本体2の流体的な入口であり、延長管3と分離集塵部15とを流体的に接続する継手でもある。掃除機本体2から延長管3を取り外すことによって、吸込管16は、掃除機本体2をハンディー型電気掃除機として単体で使用する際の吸込口として機能する。吸込管16の筒先は、掃除機本体2の前方へ開放されている。
吸込管16の後端部は、分離集塵部15に接続される第二開口を有している。第二開口は、吸込管16の径方向外側へ向かって開放されている。第二開口は、本体ケース12の下方へ向かって開放されて分離集塵部15へ向かっている。第二開口は、本体ケース12の前部12aの底面に設けられている。本体ケース12に分離集塵部15が装着されている状態では、前部12aの底面は、分離集塵部15に近接して倣う。そうすると、第二開口は、分離集塵部15に流体的に接続される。
分離集塵部15は、本体ケース12の前部12aと本体ケース12の中央部12bとが成すL文字形状の収容空間に配置されている。分離集塵部15は、掃除機本体2に流れ込む含塵空気から塵埃を分離し、捕集し、蓄積する一方で、塵埃が除去された清浄な空気を電動送風機13へ送る。分離集塵部15は、塵埃と空気との質量の差異を利用して塵埃と空気とを遠心分離する遠心分離方式である。分離集塵部15の下流側に含塵空気から塵埃を濾し取る濾過分離方式のフィルターが設けられていても良い。
また、分離集塵部15は、本体ケース12の前後方向に沿って筒状に延伸している。換言すると、分離集塵部15は、本体ケース12の前後方向に延びる中心線Cを有する筒形状の容器である。分離集塵部15の中心線Cに沿う方向、分離集塵部15の延伸方向、分離集塵部15の長手方向は、実質的に同意であり、本体ケース12の前後方向に実質的に一致している。したがって、分離集塵部15の中心線Cは、吸込管16の中心線に実質的に平行している。また、分離集塵部15は、吸込管16に併設されている。つまり、分離集塵部15の長手方向は、吸込管16の長手方向に倣っている。分離集塵部15の直径は、吸込管16の直径よりも大きく、分離集塵部15は、吸込管16および本体ケース12の前部12aよりも掃除機本体2の左右方向(幅方向)に突出している。なお、掃除機本体2の左右方向(幅方向)は、筒状の分離集塵部15の中心線Cおよび吸込管16の中心線を実質的に含む仮想的な平面の法線方向、あるいは筒状の分離集塵部15の中心線Cおよび吸込管16の中心線を実質的に通る仮想的な平面の法線方向に相当する。また、この仮想的な平面は、掃除機本体2の中央縦断面に相当する。
保持機構は、分離集塵部15の一方の端部と本体ケース12とを着脱可能に連結する第一機構と、分離集塵部15の他方の端部と本体ケース12とを着脱可能に連結する第二機構と、を備えている。
第一機構は、分離集塵部15に設けられる凹部に、本体ケース12に設けられる凸部を引っ掛けて分離集塵部15と本体ケース12とを連結する機構である。第一機構の凹部と凸部とは、分離集塵部15と本体ケース12との相対的な位置の変化によって引っ掛かったり、外れたりする。
第一機構の凸部は、本体ケース12の前部12aの底面の前端部に設けられている。第一機構の凹部は、分離集塵部15の一方の端部であって、凸部に適合する位置に配置されている。
第二機構は、分離集塵部15に設けられる凸部に、本体ケース12に設けられる凹部を引っ掛けて分離集塵部15と本体ケース12とを連結するロック機構である。第二機構は、第一機構と異なり、分離集塵部15と本体ケース12との相対的な位置を保ったまま、凹部から凸部を外すことが可能な操作片を備えている。操作片は、分離集塵部15に設けられ、第二機構の凸部は、操作片に一体化されている。
第二機構の凹部は、本体ケース12の中央部12bの底部、つまり吸込管16の径方向において吸込管16から最も遠い部位に設けられている。第二機構の凸部は、分離集塵部15の他方の端部であって、凹部に適合する位置に配置されている。そして、第一機構の凹部と第二機構の凸部とは、いずれも分離集塵部15に設けられ、かつ分離集塵部15の長手方向の中心、かつ短手方向の中心に対して実質的に対象に配置されている。また、第一機構の凹部から見て第二機構の凸部は、分離集塵部15内で最も離れた部位に配置されている。
操作片は、スライド、スイングを含む機械的な移動をともなう操作が可能であり、この操作にともなう移動を凹部から凸部を外す動きに変換する種々の機構の一部である。例えば、使用者が操作片をスライドさせることで、第二機構の凸部を凹部から外すことができる。また、操作片は、使用者によって操作されていない場合には、第二機構の凸部を凹部に引っ掛かる位置へ移動させる。
分離集塵部15が本体ケース12に装着されている場合には、第一機構は、凹部に凸部を引っ掛けて分離集塵部15と本体ケース12とを連結し、第二機構は、凹部に凸部を引っ掛けて分離集塵部15と本体ケース12とを連結している。そして、操作片が操作されて第二機構の凸部が第二機構の凹部から抜け出すと、第二機構のロックが解除される。このとき、第一機構の凸部は、凹部に引っ掛かった状態を維持している。そこで、使用者は、第二機構のロックが解除されている状態で、第一機構を支点にして分離集塵部15の他方の端部を本体ケース12から遠ざける。そうすると、分離集塵部15は本体ケース12から離れ、いずれ第一機構の凸部が凹部から抜け出して第一機構のロックも解除される。
分離集塵部15が本体ケース12から離脱している場合には、先ず、第一機構の凸部が凹部に引っ掛けられる。使用者は、第一機構がロックされている状態で、第一機構を支点にして分離集塵部15の他方の端部を本体ケース12に近づける。そうすると、分離集塵部15は本体ケース12に装着され、いずれ第二機構の凸部が凹部に引っ掛かって第二機構もロックされる。
なお、本実施形態に係る分離集塵部15は、円弧軌道を描きながら本体ケース12に着脱されるが、吸込管16の径方向へ直線軌道を描きながら着脱されるものであっても良い。この場合には、第一機構および第二機構は、実質的に同時にロックされたり、ロックを解除されたりすることが好ましい。本体ケース12に分離集塵部15が着脱される際の分離集塵部15の移動方向は、吸込管16の長手方向に交差する方向であれば良い。したがって、本体ケース12に分離集塵部15が装着される際には、分離集塵部15は、吸込管16の径方向において吸込管16に近づく方向へ移動し、本体ケース12から分離集塵部15が離脱される際には、分離集塵部15は、吸込管16の径方向において吸込管16から遠ざかる方向へ移動すれば良い。
本体ケース12の中央部12bは、分離集塵部15の排気側に流体的に接続される連結口と、連結口と電動送風機13とを流体的に接続する分離部下流風路管と、を備えている。中央部12bは、分離集塵部15と本体ケース12の後部12cとの間に挟み込まれている部位を含んでいる。この部位に連結口および分離部下流風路管が配置されている。
連結口は、中央部12bの正面を臨む部位に配置されている。連結口は、分離集塵部15が本体ケース12に装着された状態で、分離集塵部15の後ろ側の端面に正対する。したがって、連結口は、分離集塵部15が本体ケース12に装着された状態で、分離集塵部15の中心線Cの延長線上に配置される。
電動送風機13の吸込側は、連結口および分離部下流風路管を介して分離集塵部15に接続される。電動送風機13は、分離集塵部15から空気を吸い込んで吸込負圧を発生させる。電動送風機13は、羽根車と、羽根車の回転駆動力を発生する電動機と、電動機から羽根車へ回転駆動力を伝達する回転軸と、を備えている。
羽根車は、例えばターボファンであり、複数の羽根を備えている。それぞれの羽根は、円錐状のハブの中心部からハブの外縁部へ向かって徐々にハブの径方向へ向かって起立する、捻れた形状を有している。換言すると、それぞれの羽根は、前縁から後縁に掛けて翼型(airfoil)または翼断面(wing section)が変化する、いわゆる3次元翼である。羽根車は、吸込口を有するケースに覆われている。
電動送風機13は、回転軸を中心とする円筒状、または円柱状の形状を有している。回転軸の中心線を本体ケース12の前後方向へ向け、かつ吸込口を前方へ向けて本体ケース12に収容されている。また、電動送風機13の回転軸の中心線は、実質的に分離集塵部15の延長線C上に配置されている。
本体ケース12の後部12cは、本体制御部17が実装される制御回路板21を収容している。制御回路板21は、電動送風機13の真後ろに配置されている。
本体制御部17は、マイクロプロセッサー、およびマイクロプロセッサーが実行する各種演算プログラム、パラメータなどを記憶する記憶装置を備えている。記憶装置は、予め設定される複数の運転モードに関連する種々の設定、つまり引数を記憶している。複数の運転モードは電動送風機13の出力に関連付けられている。それぞれの運転モードには、相互に異なる入力値、つまり電動送風機13の入力値であり、電動送風機13に流れる電流目標値が設定されている。それぞれの運転モードは、入力部22が受け付ける操作入力に関連付けられている。本体制御部17は、入力部22への操作入力に対応する任意の運転モードを、予め設定される複数の運転モードから択一的に選択し、選択した運転モードの設定を記憶部から読み出し、読み出した運転モードの設定にしたがって電動送風機13を運転する。
本体ケース12の後部12cは、分離集塵部15が本体ケース12に装着された状態において、分離集塵部15の中心線Cの延長線上に配置されている。
二次電池18は、蓄電池、充電式電池、および充電池とも呼ばれる。二次電池18は、電動送風機13や本体制御部17で消費される電力を蓄える。二次電池18は、本体ケース12の後部12cの底部に着脱可能に装着されている。二次電池18は、着脱不能に固定されていても良い。着脱可能な二次電池18は、複数の二次電池18を準備しておくことで、適宜に交換して利用できる。電気掃除機1に装着されている二次電池18の充電率が低下した場合には、この二次電池18を、充電済みの二次電池18に交換することによって、電気掃除機1は、運転を継続できる。
なお、電気掃除機1は、二次電池18に代えて一次電池を電源として利用するものであっても良い。
把手部11は本体ケース12に一体に設けられている。把手部11は、電気掃除機1で床面を掃除するために、使用者が手で把持する部分である。そのため、把手部11は、人の手指で把持し易い適宜の形状を有することが好ましい。
把手部11は、本体ケース12の前部12aと後部12cとの間に架設されている。把手部11は、前部12aの後端から延長管3の延長方向へ延び、かつ弧状に湾曲して後部12cの後端部に繋がっている。把手部11と本体ケース12の中央部12bの背面との間、および把手部11と本体ケース12の後部12cの天面との間には、一続きの空間が、本体ケース12の左右方向(幅方向)へ貫通している。この空間には、把手部11を握る使用者の手指、もっぱら人差し指、中指、薬指、および小指を含む四指が配置される。
入力部22は、把手部11を握った使用者が、その親指で容易に操作できるよう、把手部11の前側の端部の天面に設けられている。
入力部22は、電動送風機13の運転開始操作を受け付ける運転開始スイッチ22aと、電動送風機13の運転停止操作を受け付ける運転停止スイッチ22bと、を備えている。運転開始スイッチ22aおよび運転停止スイッチ22bは、本体制御部17に電気的に接続されている。電気掃除機1の使用者は、入力部22を操作して電動送風機13の運転モードを択一的に選択できる。運転開始スイッチ22aは、電動送風機13の運転中に、運転モードの切替スイッチとしても機能している。この場合、本体制御部17は、運転開始スイッチ22aから操作信号を受け取る度に運転モードを強→中→弱→強→中→弱→………の順に切り換える。換言すると、運転開始スイッチ22aは、電動送風機13の始動および電動送風機13の運転出力変更の少なくともいずれかを指令する。なお、入力部22は、運転開始スイッチ22aに代えて、強運転スイッチ(図示省略)、中運転スイッチ(図示省略)、および弱運転スイッチ(図示省略)を個別に備えていても良い。
延長管3および吸込口体5は、電動送風機13から作用する負圧によって、床面上の塵埃を空気とともに吸い込んで掃除機本体2へ案内する。
延長管3は、掃除機本体2の吸込管16および分離集塵部15を介して電動送風機13の吸込側に流体的に接続されている。延長管3は、使用者が掃除機本体2の把手部11を把持した状態で実質的に床面に届く長さを有している。延長管3の一方の端部には、掃除機本体2の吸込管16に着脱自在な継手構造が設けられている。延長管3の他方の端部には、吸込口体5を着脱自在な継手構造が設けられている。延長管3は、伸縮可能であっても良いし、そうでなくても良い。
吸込口体5は、木床やカーペットなどの床面上を走行自在または滑走自在であり、走行状態または滑走状態において床面に対向する底面に吸込口19を有している。また、吸込口体5は、吸込口19に配置される回転可能な回転清掃体28と、回転清掃体28を駆動させる駆動源としての電動機29と、を備えている。吸込口体5の一方の端部には、延長管3の他方の端部に着脱自在な継手構造が設けられている。吸込口体5は、延長管3、吸込管16、および分離集塵部15を介して電動送風機13の吸込側に流体的に接続されている。吸込口体5、延長管3、吸込管16、および分離集塵部15は、吸込口19から電動送風機13へ至る吸込風路である。
電気掃除機1は、運転開始スイッチ22aが操作されると電動送風機13を始動させる。例えば、電気掃除機1は、電動送風機13が停止している状態で運転開始スイッチ22aが操作されると、先ず電動送風機13を強運転モードで始動させ、再び運転開始スイッチ22aが操作されると電動送風機13の運転モードを中運転モードに変更し、三度、運転開始スイッチ22aが操作されると電動送風機13の運転モードを弱運転モードに変更し、以下同様に繰り返す。強運転モード、中運転モード、および弱運転モードは、予め設定される複数の運転モードである。電動送風機13に対する入力値は、強運転モードが最も大きく、弱運転モードが最も小さい。始動した電動送風機13は、分離集塵部15から空気を吸込み、分離集塵部15内を負圧にする。
分離集塵部15内の負圧は、吸込管16、延長管3、および吸込口体5を順次に通じて吸込口19に作用する。電気掃除機1は、吸込口19に作用する負圧によって、床面上の塵埃を空気とともに吸い込んで床面を掃除する。分離集塵部15は、電気掃除機1に吸い込まれた含塵空気から塵埃を分離し、蓄積する一方で、含塵空気から分離した空気を電動送風機13へ送る。電動送風機13は、分離集塵部15から吸い込んだ空気を掃除機本体2外へ排気する。
図2は、本発明の実施形態に係る電気掃除機の吸込口体の制御ブロック図である。
図2に示すように、本実施形態に係る吸込口体5は、掃除機本体2に装着された二次電池18から供給される電力で、電動機29を駆動する。吸込口体5は、回転清掃体28と、回転清掃体28を回転駆動する駆動力を発生させる電動機29と、電動機29の運転を制御する吸込口体制御部41と、を備えている。
回転清掃体28は、軸と、軸から放射状に延びる多数のブラシ毛と、を備えている。吸込口体5が床面に接地している場合には、吸込口体5の吸込口19の外側へ突出する回転清掃体28の一部、つまりブラシ毛の一部が床面に接触する。そのため、吸込口体5が床面に接地している場合に、電動機29が回転清掃体28を回転させると、回転清掃体28の回転によってブラシ毛の先端が次々に床面を払拭する。吸込口体5が床面から離れている場合には、回転清掃体28も床面から離れる。
吸込口体制御部41は、延長管3を通って掃除機本体2に達する2つの電線45によって二次電池18に電気的に接続されている。2つの電線45の一方は、接地側電線46であり、2つの電線45の他方は、非接地側電線47である。なお、吸込口体制御部41は、本体制御部17とともに本体ケース12内の制御回路板21に実装されていても良い。換言すると、吸込口体制御部41は、掃除機本体2に設けられていても良い。
吸込口体制御部41は、運転開始スイッチ22aが操作された場合に電動機29を始動させる。電気掃除機1は、運転開始スイッチ22aとは別個に、電動機29の始動および電動機29の運転出力変更の少なくともいずれかを指令する電動機用スイッチを備えていても良い。その場合には、吸込口体制御部41は、電動機用スイッチが操作された場合に電動機29を始動させる。
吸込口体制御部41は、二次電池18から供給される電力を降圧して制御用の電力を出力する制御用電源生成回路51と、基準電圧を出力する基準電圧発生回路52と、電動機29の駆動回路53と、電動機29に流れる電流を検出する電流検出回路55と、電動機29に流れる電流を制限する電流制限回路56と、電動機29に繋がる給電路を開閉する開閉器57と、を備えている。
基準電圧発生回路52は、矩形波の立ち上がりを電流制限回路56へ指示する矩形波である。
電流検出回路55は、電動機29に流れる電流の検出結果に相関する電圧値を電流制限回路56に出力する。電流検出回路55は、電動機29に流れる電流を電圧に変換するシャント抵抗と、シャント抵抗によって変換した電圧を増幅して対応する電流制限回路56へ出力する増幅回路と、を含んでいる。増幅回路は、いわゆる差動増幅回路である。
電流制限回路56は、電流検出回路55の出力電圧を基にした矩形波の立ち下がり電圧値タイミングと基準電圧発生回路52が出力する矩形波の立ち上がりタイミングにより、駆動回路53のスイッチング素子をスイッチングするための矩形波を生成する。つまり、電流制限回路56は、駆動回路53を駆動するためのPWM信号のDuty比を上げ下げする。
駆動回路53は、電動機29に入力される電力をスイッチングするスイッチング素子を含んでいる。駆動回路53は、スイッチング素子をパルス幅変調制御で開閉する。スイッチング素子は、二次電池18から対応する電動機29へ駆動電力を供給する非接地側電線47を開閉する。スイッチング素子は、MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)などの素子である。スイッチング素子は、対応する電流制限回路56に接続されるゲートを備えている。スイッチング素子は、ゲート電流またはゲート電圧の変化に応じて電動機29の入力(駆動電流)を変える。
開閉器57は、吸込口体5が床面から離れた場合に、電動機29への電力供給を断って回転清掃体28の回転駆動を停止させる安全装置58の一部である。安全装置58は、開閉器57と、吸込口体5の底面に対する突出量を変化可能であり、吸込口体5が床面に接地しているか否かを検出する接地検知部61を備えている。吸込口体5が底面を床面に接地させていることを接地検知部61が検知している場合には、安全装置58は、開閉器57を閉じて電動機29への電力供給を許可し、吸込口体5が底面から離れていることを接地検知部61が検知している場合には、安全装置58は、開閉器57を開いて電動機29への電力供給を遮断する。また、安全装置58は、吸込口体5が底面を上方へ向けている場合にも、開閉器57を開いて電動機29への電力供給を遮断する。
ところで、回転清掃体28を接触させる被接触面である床面の代表例としてフローリング、およびカーペットが知られている。フローリングは、カーペットに比べて平滑であり、カーペットは、一般に毛羽立っていて凹凸を有している。そのため、フローリングと回転清掃体28との間の回転抵抗は、比較的に小さく、カーペットと回転清掃体28との間の回転抵抗は、フローリングと回転清掃体28との間の回転抵抗に比べて極めて大きい。したがって、電動機29は、回転清掃体28の回転抵抗の大小の観点において異なる性質を有する複数種類の床面上で回転清掃体28を回転駆動させなければならない。
図3は、本発明の実施形態に係る電気掃除機が実行する電動機の入力制御の一例を示すフローチャートである。
そこで、図3に示すように、本実施形態に係る電気掃除機1の電流制限回路56は、電動機29が回転駆動している場合、電流検出回路55の出力結果、つまり電動機29に流れる電流値から回転清掃体28の回転抵抗の大小、つまり電動機29の負荷トルクを推定し、ひいては回転清掃体28が接触している床面の種類を推定して電動機29への供給電力を増減させる。電流検出回路55は、回転清掃体28が接する被接触面に対する回転清掃体28の回転抵抗の大小を判別可能な物理量として電動機29に流れる電流値を検出する検出部として機能する。例えば、回転抵抗の小さいフローリングの場合では、電流制限回路56は、電動機29への供給電力を低く抑え、回転抵抗の大きいカーペットの場合では、電流制限回路56は、電動機29への供給電力を高くする。
ここで、回転清掃体28の回転抵抗が小さいフローリングを第一被接触面とし、回転清掃体28の回転抵抗が大きいカーペットを第二被接触面とし、フローリングに接する回転清掃体28を回転駆動させる場合の電動機29の入力を第一入力とし、カーペットに接する回転清掃体28を回転駆動させる場合の電動機29の入力を第二入力とする。そのときに、回転清掃体28と第二被接触面との回転抵抗は、回転清掃体28と第一被接触面との回転抵抗よりも大きく、第二被接触面に接する回転清掃体28を回転駆動させる電動機29の第二入力は、第一被接触面に接する回転清掃体28を回転駆動させる電動機29の第一入力よりも大きい。
具体的には、電流制限回路56は、電動機29の電流値が零値より大きいか否かを判断する(ステップS1)。電動機29が回転清掃体28を回転駆動させていれば、ステップS1は肯定される。安全装置58の開閉器57が開いて電動機29に電力が供給されていない場合、吸込口体5が装着されていない場合には、ステップS1は否定され(ステップS1 No)、処理が繰り返される。
ステップS1が肯定される場合には(ステップS1 Yes)、電流制限回路56は、電動機29に流れる電流値に基づいて回転清掃体28が接している床面の種類を推定する(ステップS2)。ステップS2における床面の種類は、複数の条件によって推定される。例えば、第一条件は、電動機29に流れる電流値の現在の大きさである。第二条件は、所定の床面推定時間遡った時間から現在までの時間、例えば3秒間において電動機29に流れる電流値の変化量の大きさである。第一条件として電動機29に流れる電流値の現在値が予め定める閾値以上となる状態が一定時間以上継続した場合、かつ第二条件として所定の床面推定時間遡った時間から現在までの時間に電動機29に流れる電流値の変化量の大きさが予め定める第二閾値以上の場合には、回転清掃体28が接している床面の種類を第二被掃除面であるカーペットと推定する。また、いずれか一方の条件が満たされない場合には、回転清掃体28が接している床面の種類を第一被掃除面であるフローリングと推定する。
換言すると、電流制限回路56は、回転抵抗の異なる床面を複数の条件で判別して電動機29の入力の大小を制御する。
なお、回転清掃体28が接している床面の種類を推定する方法は、電動機29に流れる電流に基づくものに限られない。電流制限回路56は、既知の床面推定方法を利用することができる。例えば、カメラで吸込口体5の周囲を撮影し、撮影した画像を解析することで吸込口体5が接している床面の種類を推定する方法を採用しても良い。フローリングはカーペットに比べて光を反射しやすいので、カメラが撮影した画像を解析することで、床面の種類を推定することができる。また、光発信機と受光器を吸込口体5の周囲に配し、受光器が受けた光量をから床面の種類を推定する方法を採用しても良い。フローリングはカーペットに比べて光を反射しやすいので、反射率から床面の種類を推定することができる。
そして、電流制限回路56は、ステップS2で推定した床面の種類が第二被接触面の場合には(ステップS3 Yes)、電動機29へ供給する電力を第二入力に設定する(ステップS4)、ステップS1へ戻って処理を繰り替えす。つまり、回転清掃体28が回転抵抗の大きい第二被接触面であるカーペットに接していると判断して電動機29へ供給する電力を大きく設定する。他方、電流制限回路56は、ステップS2で推定した床面の種類が第二被接触面ではない場合には(ステップS3 No)、電動機29へ供給する電力を第一入力に設定し(ステップS5)、ステップS1へ戻って処理を繰り替えす。つまり、回転清掃体28が回転抵抗の小さい第一被接触面であるフローリングに接していると判断して電動機29へ供給する電力を小さく設定する。
これら第一被接触面における回転抵抗、第二被接触面における回転抵抗、第一入力、および第二入力の大小関係は、被接触面の具体例であるフローリングおよびカーペットに限らない。つまり、電流制限回路56は、回転清掃体28の回転抵抗が大きいほど、電動機29の入力を大きく設定する。そのような電動機29の入力制御は、対象とする被接触面の種類が3以上の複数であっても良い。また、電動機29の入力制御は、被接触面の種類毎に段階的に変更されても良いし、回転清掃体28の回転抵抗に応じて連続的、かつ線形に変更されても良い。
また、ステップS1は否定され(ステップS1 No)、かつ予め定める停止継続時間が過ぎた場合には、電流制限回路56は、駆動回路53のスイッチング素子を制御して電動機29への電力供給を遮断しても良い。
ところで、電動機29は、例えば吸込口体5が床面から離れ、安全装置58の開閉器57が開くと、電力の供給が断たれて停止する。そして、吸込口体5が床面に再接地し、安全装置58の開閉器57が閉じると、電力の供給を得て再始動する。
従来の電気掃除機は、この電動機の再始動時に突入電流が過大になることを回避するために電動機へ供給する電力を基準電流より小さい第一電力へ減少させる。そのため、例えば、回転清掃体がカーペットのように回転抵抗が大きい床面に接していると、電動機の再始動が阻害され、低速回転になり充分に塵埃を掻き出せなくなったり、停止したままになったりする虞がある。電動機の再始動が阻害されれば電動機を流れる電流値は瞬時に上昇して基準電流より数倍大きく、放置すれば電動機の焼損に至りかねない異常電流を超えてしまうため、制御部は、電動機への電力供給を強制的に遮断する。したがって、第一電力より大きい第二電力の供給は行われず、電動機の再始動は益々困難になる。しかも、一旦床面から離れた吸込口体5は、必ずしも同じ性質の床面に再接地されるとは限らない。例えば、回転抵抗の小さいフローリングを離れた後、回転抵抗の大きいカーペットに再接地されることは起こり得る。
図4は、本発明の実施形態に係る電気掃除機が実行する電動機の再始動制御の一例を示すフローチャートである。
そこで、図4に示すように、本実施形態に係る電気掃除機1の吸込口体制御部41は、被接触面に接触した回転清掃体28を始動させる場合には、電動機29を一時的に第一入力より大きい第三入力で始動する。
また、吸込口体制御部41は、電動機29の回転駆動中に回転清掃体28が床面から離れた場合には、電動機29を停止させ、かつ予め定める所定の第一時間以内に回転清掃体28が被接触面に再接地した場合には電動機29を停止前の入力で再始動させる一方、所定の第一時間を過ぎて回転清掃体28が床面に再接地した場合には電動機29を第三入力で再始動させる。
さらに、吸込口体制御部41は、回転抵抗の異なる床面を複数の条件で判別して電動機29の入力の大小を制御する一方、第三入力で電動機を始動させてから予め定める所定の第二時間以内は、条件を緩和して回転抵抗の異なる床面を判別する。
具体的には、吸込口体制御部41は、例えば吸込口体5が床面から離れ、安全装置58の開閉器57が開くと(ステップS11 Yes)、第一タイマーの計時を開始する(ステップS12)。このとき、電動機29は、電力の供給が断たれて停止する。
次いで、吸込口体制御部41は、第一タイマーが所定の第一時間を超えた場合には(ステップS13 Yes)、電動機29へ供給する入力を第三入力に設定する(ステップS14)。ステップS14が実行された場合には、電動機29へ供給する入力を第三入力に設定されたことを示す情報、いわゆるフラグが立てられる。
第三入力は、回転清掃体28を接触させる可能性のある床面の性質を網羅していることが好ましく、最も回転抵抗の大きい床面であっても電動機29を始動させることが可能な入力値であることが好ましい。例えば、第一被接触面であるフローリングと、第二被接触面であるカーペットに限って考えた場合には、回転清掃体28がカーペットに接している状態で電動機29を始動できれば良い。そのような場合、第三入力が第二入力以上であれば、回転清掃体28がフローリングおよびカーペットのいずれに接触していても、電動機29を確実に始動できる。
また、吸込口体制御部41は、第一タイマーが所定の第一時間以内の場合には(ステップS13 No)、電動機29へ供給する入力を変更せず、ステップS11によって電動機29が停止する直前の入力を維持する。
次いで、吸込口体制御部41は、例えば吸込口体5が床面に接地して安全装置58の開閉器57が閉じると(ステップS15 Yes)、第二タイマーの計時を開始する(ステップS16)。このとき、電動機29は、電力の供給が再開されて再始動する。
つまり、吸込口体制御部41は、吸込口体5が床面の凹凸(ラグやバスマットの凹凸)によって意図せず浮き上がったり、誤吸引を回避するために一時的に持ち上げられたりして床面から離れ、所定の第一時間以内に床面に再接地する場合には、電動機29の入力を変更せず、吸込口体5が床面から離れる直前の入力値である第一入力または第二入力で電動機29を再始動する一方、吸込口体5が床面から離れ、移動などして所定の第一時間を超えてから床面に再接地する場合には、電動機29の入力を第三入力に変更して電動機29を再始動する。
なお、第一タイマーの計時と第二タイマーの計時とは、同時に行われない。したがって、第一タイマーおよび第二タイマーは、同一のタイマーであっても良い。
また、吸込口体制御部41は、安全装置58の開閉器57が閉じた直後の電動機29への突入電流を抑えるために、電動機29の入力を第三入力へ向かって徐々に上昇させても良い。この場合、電動機29の入力が電動機29への突入電流を抑えることが可能な水準から第三入力へ達するまでに、例えば0.5秒以内であることが好ましい。
電動機29の再始動の直後、吸込口体制御部41は、電動機29へ供給する入力を第三入力に設定されたことを示す情報が立てられているか否かを判断する(ステップS17)。
電動機29へ供給する入力を第三入力に設定されたことを示すフラグが立っていない場合には(ステップS17 No)、吸込口体制御部41は、図3に示した電動機29の入力制御へ移行し(ステップS18)、再始動制御を終了する。
他方、電動機29へ供給する入力を第三入力に設定されたことを示すフラグが立っている場合には(ステップS17 Yes)、吸込口体制御部41は、第二タイマーが所定の第二時間を過ぎるまで(ステップS19 Yes)、図3に示した電動機29の入力制御のステップS2における床面の種類の推定条件を緩和して、電動機29の入力制御を実行する(ステップS20)。また、吸込口体制御部41は、第二タイマーが所定の第二時間を過ぎると(ステップS19 No)、図3に示した電動機29の入力制御へ移行し(ステップS18)、再始動制御を終了する。
このステップS20における推定条件の緩和とは、複数の条件のうち少なくとも1つの条件を排除して、床面の種類を判定することを言う。通常のステップS2では、第一条件として電動機29に流れる電流値の現在値が予め定める閾値以上となる状態が一定時間以上継続した場合、かつ第二条件として所定の床面推定時間遡った時間から現在までの時間において電動機29に流れる電流値の変化量の大きさが予め定める第二閾値以上の場合には、回転清掃体28が接している床面の種類を第二被掃除面であるカーペットと推定する。緩和した推定条件では、例えば第二条件を排除し、第一条件のみで床面を推定する。つまり、吸込口体制御部41は、第二タイマーが所定の第二時間を過ぎるまで(ステップS19 Yes)、第一条件として電動機29に流れる電流値の現在値が予め定める閾値以上となる状態が一定時間以上継続した場合の場合には、回転清掃体28が接している床面の種類を第二被掃除面であるカーペットと推定し、第一条件が満たされない場合には、回転清掃体28が接している床面の種類を第一被掃除面であるフローリングと推定する。また、吸込口体制御部41は、第二タイマーが所定の第二時間を過ぎると(ステップS19 No)、ステップS2の推定条件を元の複数の条件に戻す。
第二時間は、ステップS2の第二条件における床面推定時間と同じに設定されることが好ましい。
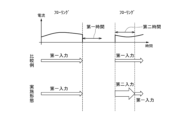
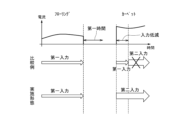
図5から図8は、本発明の実施形態に係る電動機の再始動制御と比較例の再始動制御とを比較する模式図である。
比較例の再始動制御は、吸込口体5が床面に再接地すると突入電流を抑制するために低めの電流、例えば本実施形態においてフローリングに接する回転清掃体28を回転駆動させる場合の電動機29の第一入力で電動機29を始動させるものとする。
また、図5から図8の本実施形態に係る再始動制御では、第三入力と第二入力とが同じ入力値に設定されているものとする。
図5は、第二被接触面であるカーペットに接地している吸込口体5が第二被接触面から離れ、第一タイマーが第一時間を超えた後に第一被接触面であるフローリングに再接地して、電動機29が再始動する場合を示す図である。
図5に示すように、比較例では、吸込口体5が第一被接触面(フローリング)に再接地すると、電動機29の入力を第二入力から第一入力へ低下させて電動機29を再始動する。この場合、回転清掃体28は、フローリングとの回転抵抗に抗して容易に再始動する。
また、本実施形態の電気掃除機1では、吸込口体5が第一被接触面(フローリング)に再接地すると、電動機29の入力を第二入力から第三入力(第三入力=第二入力)へ変更して電動機29を再始動する。この場合も、回転清掃体28は、フローリングとの回転抵抗に抗して容易に再始動する。
図6は、第二被接触面であるカーペットに接地している吸込口体5が第二被接触面から離れ、第一タイマーが第一時間を超えた後に第二被接触面であるカーペットに再接地して、電動機29が再始動する場合を示す図である。
図6に示すように、比較例では、吸込口体5が第二被接触面(カーペット)に再接地すると、電動機29の入力を第二入力から第一入力へ低下させて電動機29を再始動する。この場合、回転清掃体28は、カーペットとの回転抵抗に抗して再始動しなければならない。そのため、比較例では、回転清掃体28が回転抵抗に抗して回転することができず、電動機29の再始動に失敗する虞がある。
一方、本実施形態の電気掃除機1では、吸込口体5が第二被接触面(カーペット)に再接地すると、電動機29の入力を第二入力から第三入力(第三入力=第二入力)へ変更して電動機29を再始動する。本実施形態の電気掃除機1では、回転清掃体28は、カーペットとの回転抵抗に抗して容易に再始動する。
図7は、第一被接触面であるフローリングに接地している吸込口体5が第一被接触面から離れ、第一タイマーが第一時間を超えた後に第一被接触面であるフローリングに再接地して、電動機29が再始動する場合を示す図である。
図7に示すように、比較例では、吸込口体5が第一被接触面(フローリング)に再接地すると、電動機29の入力を第一入力のまま電動機29を再始動する。この場合、回転清掃体28は、フローリングとの回転抵抗に抗して容易に再始動する。
また、本実施形態の電気掃除機1では、吸込口体5が第一被接触面(フローリング)に再接地すると、電動機29の入力を第二入力から第三入力(第三入力=第二入力)へ変更して電動機29を再始動する。この場合も、回転清掃体28は、フローリングとの回転抵抗に抗して極めて容易に再始動する。
図8は、第一被接触面であるフローリングに接地している吸込口体5が第一被接触面から離れ、第一タイマーが第一時間を超えた後に第二被接触面であるカーペットに再接地して、電動機29が再始動する場合を示す図である。
図8に示すように、比較例では、吸込口体5が第二被接触面(カーペット)に再接地すると、電動機29の入力を第一入力のまま電動機29を再始動する。この場合、回転清掃体28は、カーペットとの回転抵抗に抗して再始動しなければならない。そのため、比較例では、回転清掃体28が回転抵抗に抗して回転することができず、電動機29の再始動に失敗する虞がある。
一方、本実施形態の電気掃除機1では、吸込口体5が第二被接触面(カーペット)に再接地すると、電動機29の入力を第一入力から第三入力(第三入力=第二入力)へ変更して電動機29を再始動する。本実施形態の電気掃除機1では、回転清掃体28は、カーペットとの回転抵抗に抗して容易に再始動する。
以上のように、本実施形態に係る電気掃除機1は、回転抵抗が小さい第一被接触面を検出した時に電動機29に供給する入力を第一入力とし、第一被接触面より回転抵抗が大きい第二被接触面を検出した時に電動機29に供給する入力を第二入力とするとき、第二入力を第一入力より大きく制御し、かつ床面に接触した回転清掃体28を始動させる場合には、電動機29を一時的に第一入力より大きい第三入力で始動する。そのため、電気掃除機1は、床面と回転清掃体28との回転抵抗に抗して、電動機29を確実に始動させることが可能であり、かつ床面の性質に適合する塵埃除去性能と省電力性とを両立できる。なお、電動機29の始動時に、回転清掃体28は、吸込口体5を前進させる方向へ回転する。そして、電動機29の始動時に電動機29を一時的に第一入力より大きい第三入力で始動することによって、電気掃除機1は、一般的に吸込口体5を押し進めることによって始められる掃除において、吸込口体5の動き始めの補助を行うことができる。
また、本実施形態に係る電気掃除機1は、床面に接触した回転清掃体28を始動させる場合には、電動機29を一時的に第二入力以上の第三入力で始動する。そのため、電気掃除機1は、床面と回転清掃体28との回転抵抗に抗して、電動機29をより確実に始動させることが可能であり、かつ床面の性質に適合する塵埃除去性能と省電力性とを両立できる。
さらに、本実施形態に係る電気掃除機1は、回転清掃体28が床面に接した場合に電動機29を始動させる。そのため、電気掃除機1は、回転清掃体28が床面から離れた場合に電動機29を容易に停止させ、かつ回転清掃体28が床面に再接地した場合に電動機29を容易に再始動させることができる。
また、本実施形態に係る電気掃除機1は、電動機29の回転駆動中に回転清掃体28が床面から離れた場合には、電動機29を停止させ、かつ予め定める第一時間以内に回転清掃体28が床面に再接地した場合には電動機29を停止前の入力で再始動させる一方、第一時間を過ぎて回転清掃体28が床面に再接地した場合には電動機29を第三入力で再始動させる。そのため、電気掃除機1は、吸込口体5が頻繁に床面から離れたり、例えばカーペットの凹凸によって吸込口体5が床面から離れたことを一時的に誤検知したりするような状況で、入力の切替が頻繁に生じることを回避できる。
さらに、本実施形態に係る電気掃除機1は、電動送風機13の始動および電動送風機13の運転出力変更の少なくともいずれかに対応させて電動機29を始動させる。そのため、電気掃除機1は、ユーザーが電気掃除機1の掃除開始の意図に適応させて回転清掃体28を容易に再始動させることができる。
また、本実施形態に係る電気掃除機1は、回転清掃体28の運転指令を受け付ける電動機用スイッチに対応させて電動機29を始動させる。そのため、電気掃除機1は、ユーザーが電気掃除機1の掃除開始の意図に適応させて回転清掃体28を容易に再始動させることができる。
さらに、本実施形態に係る電気掃除機1は、回転抵抗の異なる床面を複数の条件で判別して電動機29の入力の大小を制御する一方、床面から離れた後、床面に再接触して第三入力で電動機29を始動させてから予め定める所定の第二時間以内は、床面の判別条件を緩和して回転抵抗の異なる床面を判別する。先ず、複数の条件で回転抵抗の異なる床面を判別することは、床面の判別精度を向上させる。本実施形態に係る電気掃除機1のように、第一条件として電動機29に流れる電流値の現在値が予め定める閾値以上となる状態が一定時間以上継続した否か、第二条件として所定の床面推定時間遡った時間から現在までに電動機29に流れる電流値の変化量の大きさが予め定める第二閾値以上か否か、を有する場合には、第二条件における経時的な変化を監視することで、突発的に第一条件が満たされて床面を誤判定してしまうことを回避できる。他方、床面から離れた後、床面に再接触して第三入力で電動機29を始動させた場合には、床面の判別条件を緩和して第一条件のみに限定することで、再接地後の床面の種類を速やかに判別して電動機29の入力を下げ、省電力性を高めることができる。
したがって、本実施形態に係る電気掃除機1によれば、床面と回転清掃体28との間の回転抵抗に係わらず、回転清掃体28の回転駆動を発生させる電動機29を確実に始動できる。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。