JP7464293B2 - 散乱トモグラフィ装置及び散乱トモグラフィ方法 - Google Patents
散乱トモグラフィ装置及び散乱トモグラフィ方法 Download PDFInfo
- Publication number
- JP7464293B2 JP7464293B2 JP2021535353A JP2021535353A JP7464293B2 JP 7464293 B2 JP7464293 B2 JP 7464293B2 JP 2021535353 A JP2021535353 A JP 2021535353A JP 2021535353 A JP2021535353 A JP 2021535353A JP 7464293 B2 JP7464293 B2 JP 7464293B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna element
- image
- coordinate
- transmitting
- function
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003325 tomography Methods 0.000 title claims description 76
- 238000000034 method Methods 0.000 title description 21
- 238000005259 measurement Methods 0.000 claims description 56
- 230000008859 change Effects 0.000 claims description 28
- 230000010365 information processing Effects 0.000 claims description 28
- 230000014509 gene expression Effects 0.000 claims description 20
- 230000005540 biological transmission Effects 0.000 claims description 15
- 230000010287 polarization Effects 0.000 claims description 10
- 239000000126 substance Substances 0.000 claims description 10
- 239000011358 absorbing material Substances 0.000 claims description 6
- 238000002310 reflectometry Methods 0.000 claims description 4
- 230000006870 function Effects 0.000 description 109
- 238000004088 simulation Methods 0.000 description 26
- 239000006185 dispersion Substances 0.000 description 24
- 238000010586 diagram Methods 0.000 description 20
- 239000000243 solution Substances 0.000 description 19
- ORQBXQOJMQIAOY-UHFFFAOYSA-N nobelium Chemical compound [No] ORQBXQOJMQIAOY-UHFFFAOYSA-N 0.000 description 12
- 239000000523 sample Substances 0.000 description 10
- 238000004458 analytical method Methods 0.000 description 9
- 210000000481 breast Anatomy 0.000 description 9
- 238000004364 calculation method Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 6
- 230000036962 time dependent Effects 0.000 description 6
- 210000000577 adipose tissue Anatomy 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 238000009607 mammography Methods 0.000 description 5
- 230000035699 permeability Effects 0.000 description 4
- 230000005684 electric field Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000004590 computer program Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012806 monitoring device Methods 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 239000003637 basic solution Substances 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- CNQCVBJFEGMYDW-UHFFFAOYSA-N lawrencium atom Chemical compound [Lr] CNQCVBJFEGMYDW-UHFFFAOYSA-N 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000005445 natural material Substances 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
Images



























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N22/00—Investigating or analysing materials by the use of microwaves or radio waves, i.e. electromagnetic waves with a wavelength of one millimetre or more
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/0507—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves using microwaves or terahertz waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/47—Scattering, i.e. diffuse reflection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N22/00—Investigating or analysing materials by the use of microwaves or radio waves, i.e. electromagnetic waves with a wavelength of one millimetre or more
- G01N22/02—Investigating the presence of flaws
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/003—Reconstruction from projections, e.g. tomography
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/003—Reconstruction from projections, e.g. tomography
- G06T11/005—Specific pre-processing for tomographic reconstruction, e.g. calibration, source positioning, rebinning, scatter correction, retrospective gating
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- Radiology & Medical Imaging (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Theoretical Computer Science (AREA)
- Radar Systems Or Details Thereof (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Description
本開示は、電波の散乱波を用いて、物体の内部を示す画像を生成する散乱トモグラフィ装置等に関する。
電波の散乱波を用いて物体の内部を示す画像を生成する散乱トモグラフィ装置等に関する技術として、特許文献1、特許文献2及び特許文献3に記載の技術がある。
例えば、特許文献1に記載の技術では、マイクロ波送出器から送出されたビームが検査対象に入射され、散乱したビームの振幅及び位相がマイクロ波検出器により検出される。そして、マイクロ波検出器の出力信号から誘電率の分布が計算され、検査対象における断層の像表示が行われる。
しかしながら、マイクロ波等の電波の散乱波を用いて、物体の内部を示す画像を高い精度で生成することは容易ではない。
具体的には、物体の内部の状態が既知である場合において、物体に入射された電波に対して散乱波として計測されるデータである計測データを求めることは、順方向問題と呼ばれ、容易である。一方、計測データが既知である場合において、物体の内部の状態を求めることは、逆方向問題と呼ばれ、容易ではない。
また、物体に入射される電波は、多数の周波数成分を含み得る。電波の周波数が異なると、物体における誘電率が異なり、電波の伝搬速度も異なる。つまり、電波は、複数の周波数成分に対応する複数の伝搬速度を有する。計測データは、この影響を受けるため、計測データから物体の内部の状態を求めることは、困難である。
そこで、本開示は、電波の散乱波を用いて、物体の内部を示す画像を高い精度で生成することができる散乱トモグラフィ装置等を提供する。
本開示の一態様に係る散乱トモグラフィ装置は、物体の外部から前記物体の内部へ電波を送信する送信アンテナ素子と、前記物体の内部へ送信された前記電波の散乱波を前記物体の外部で受信する受信アンテナ素子と、前記受信アンテナ素子で受信された前記散乱波を示す計測データを用いて、前記物体の内部を示す画像を生成する情報処理回路とを備え、前記情報処理回路は、前記電波の送信位置及び前記散乱波の受信位置が入力されて前記受信位置における前記散乱波の量が出力される散乱場関数が解である方程式を満たす関係式を、前記計測データを用いて導出し、前記関係式を用いて、前記画像を生成するための関数であり、デバイ緩和に従って前記電波の周波数変化と前記物体の誘電率変化との対応関係を示すパラメータが反映された関数である画像関数を導出し、前記画像関数を用いて、前記画像を生成する。
なお、これらの包括的又は具体的な態様は、システム、装置、方法、集積回路、コンピュータプログラム、又は、コンピュータ読み取り可能なCD-ROMなどの非一時的な記録媒体で実現されてもよく、システム、装置、方法、集積回路、コンピュータプログラム、及び、記録媒体の任意な組み合わせで実現されてもよい。
本開示の一態様によれば、電波の散乱波を用いて、物体の内部を示す画像を高い精度で生成することが可能になる。
本開示の一態様に係る散乱トモグラフィ装置は、物体の外部から前記物体の内部へ電波を送信する送信アンテナ素子と、前記物体の内部へ送信された前記電波の散乱波を前記物体の外部で受信する受信アンテナ素子と、前記受信アンテナ素子で受信された前記散乱波を示す計測データを用いて、前記物体の内部を示す画像を生成する情報処理回路とを備え、前記情報処理回路は、前記電波の送信位置及び前記散乱波の受信位置が入力されて前記受信位置における前記散乱波の量が出力される散乱場関数が解である方程式を満たす関係式を、前記計測データを用いて導出し、前記関係式を用いて、前記画像を生成するための関数であり、デバイ緩和に従って前記電波の周波数変化と前記物体の誘電率変化との対応関係を示すパラメータが反映された関数である画像関数を導出し、前記画像関数を用いて、前記画像を生成する。
これにより、散乱トモグラフィ装置は、送信位置及び受信位置によって散乱波の量を示す散乱場関数と、受信アンテナ素子で受信された散乱波の計測データとに基づいて、画像関数を導出するための関係式を導出することができる。また、画像関数には、電波の周波数変化と物体の誘電率変化との対応関係を示すパラメータが反映されている。したがって、散乱トモグラフィ装置は、物体の内部を示す画像の生成に、周波数変化と誘電率変化との対応関係を反映させることができる。
すなわち、散乱トモグラフィ装置は、電波の散乱波を用いて、物体の内部を示す画像を高い精度で生成することができる。
例えば、X座標、Y座標及びZ座標で構成される3次元空間において、前記送信アンテナ素子の配置位置のX座標は、前記受信アンテナ素子の配置位置のX座標と同じであり、前記散乱場関数は、

で定められ、xは、前記送信位置及び前記受信位置のX座標を表し、y1は、前記送信位置のY座標を表し、y2は、前記受信位置のY座標を表し、z1は、前記送信位置のZ座標を表し、z2は、前記受信位置のZ座標を表し、ωは、前記電波の角周波数を表し、Dは、前記電波を反射することにより前記散乱波を生じさせる物質を含む領域を表し、ξは、前記領域内の位置のX座標を表し、ηは、前記領域内の位置のY座標を表し、ζは、前記領域内の位置のZ座標を表し、ε(ξ,η,ζ)は、反射率を表し、iは、虚数単位を表し、kは、前記電波の波数を表す。
これにより、散乱トモグラフィ装置は、送信アンテナ素子の配置位置のX座標が受信アンテナ素子の配置位置のX座標と同じであることに基づいて定められる上記の散乱場関数に基づいて、画像関数を導出するための関係式を適切に導出することができる。
また、例えば、前記方程式は、

で定められる。
これにより、散乱トモグラフィ装置は、上記の散乱場関数が解である方程式として定められる上記の偏微分方程式に基づいて、画像関数を導出するための関係式を適切に導出することができる。
また、例えば、前記関係式は、

で定められ、kxは、前記散乱場関数のxに関する波数を表し、ky1は、前記散乱場関数のy1に関する波数を表し、ky2は、前記散乱場関数のy2に関する波数を表し、a(kx,ky1,ky2,k)は、

で定められ、Iは、前記送信アンテナ素子が存在する前記送信位置のインデックスを表し、Jは、前記受信アンテナ素子が存在する前記受信位置のインデックスを表し、yIは、前記送信アンテナ素子が存在する前記送信位置のY座標を表し、yJは、前記受信アンテナ素子が存在する前記受信位置のY座標を表し、ai,j(kx,ky1,ky2,k)は、kx、ky1、ky2及びkにおける前記計測データで定められる係数を表し、Φ(kx,yI,yJ,k)は、kx、yI、yJ及びkにおける前記計測データを表す。
これにより、散乱トモグラフィ装置は、送信アンテナ素子が存在する送信位置及び受信アンテナ素子が存在する受信位置に対応する計測データによって定められる上記の関係式に基づいて、画像関数を適切に導出することができる。
また、例えば、前記画像関数は、

で定められ、前記画像関数のxは、前記画像のX座標を表し、前記画像関数のyは、前記画像のY座標を表し、前記画像関数のzは、前記画像のZ座標を表し、前記画像関数における被積分関数に含まれる変数は、

で定められ、c0は、真空中の前記電波の伝搬速度を表し、a、b及びαは、前記パラメータを表す。
これにより、散乱トモグラフィ装置は、電波の周波数変化と物体の誘電率変化との対応関係を示すパラメータが反映された上記の画像関数を用いて、画像を適切に生成することができる。
また、例えば、前記情報処理回路は、前記送信アンテナ素子の配置位置及び前記受信アンテナ素子の配置位置で得られる前記計測データを前記送信アンテナ素子の配置位置と前記受信アンテナ素子の配置位置とを入れ替えて得られるデータとしても用いて、前記画像を生成する。
これにより、散乱トモグラフィ装置は、送信アンテナ素子の配置位置及び受信アンテナ素子の配置位置を変更して計測データを取得する回数を削減することができる。
また、例えば、前記散乱トモグラフィ装置は、前記受信アンテナ素子を複数備え、前記情報処理回路は、前記散乱トモグラフィ装置が備える複数の受信アンテナ素子のそれぞれで受信された前記散乱波を示す前記計測データを用いて、前記画像を生成する。
これにより、散乱トモグラフィ装置は、1つの送信位置における1回の送信に対して複数の受信位置における計測データを取得することができる。したがって、散乱トモグラフィ装置は、送信回数を削減することができ、受信位置の変更回数を削減することができる。
また、例えば、前記送信アンテナ素子と前記複数の受信アンテナ素子とは、一列に並び、前記送信アンテナ素子は、前記送信アンテナ素子と前記複数の受信アンテナ素子とが並ぶ前記一列の端に位置し、前記送信アンテナ素子と、前記複数の受信アンテナ素子のセットとの間に、電波吸収材が配置される。
これにより、送信装置及び複数の受信アンテナ素子を直線上又は曲線上に配置することが可能になる。したがって、計算処理の複雑化、及び、走査の複雑化が抑制される。また、電波吸収材によって、電波が物体に入射せずに送信アンテナ素子から受信アンテナ素子へ直接向かうことが抑制される。
また、例えば、X座標、Y座標及びZ座標で構成される3次元空間において、前記送信アンテナ素子の配置位置のX座標、Y座標及びZ座標は、それぞれ、前記受信アンテナ素子の配置位置のX座標、Y座標及びZ座標と同じであり、前記散乱場関数は、

で定められ、xは、前記送信位置及び前記受信位置のX座標を表し、yは、前記送信位置及び前記受信位置のY座標を表し、zは、前記送信位置及び前記受信位置のZ座標を表し、Dは、前記電波を反射することにより前記散乱波を生じさせる物質を含む領域を表し、ξは、前記領域内の位置のX座標を表し、ηは、前記領域内の位置のY座標を表し、ζは、前記領域内の位置のZ座標を表し、ε(ξ,η,ζ)は、反射率を表し、iは、虚数単位を表し、kは、前記電波の波数を表す。
これにより、散乱トモグラフィ装置は、送信アンテナ素子の配置位置が受信アンテナ素子の配置位置と同じであることに基づいて定められる上記の散乱場関数に基づいて、画像関数を導出するための関係式を適切に導出することができる。
また、例えば、前記方程式は、

で定められる。
これにより、散乱トモグラフィ装置は、上記の散乱場関数が解である方程式として定められる上記の偏微分方程式に基づいて、画像関数を導出するための関係式を適切に導出することができる。
また、例えば、前記関係式は、

で定められ、kxは、前記散乱場関数のxに関する波数を表し、kyは、前記散乱場関数のyに関する波数を表し、a(kx,ky,k)は、

で定められ、Iは、前記送信アンテナ素子及び前記受信アンテナ素子が存在する前記送信位置及び前記受信位置のインデックスを表し、xIは、前記送信アンテナ素子及び前記受信アンテナ素子が存在する前記送信位置及び前記受信位置のX座標を表し、zI及びf(xI)は、前記送信アンテナ素子及び前記受信アンテナ素子が存在する前記送信位置及び前記受信位置のZ座標を表し、

は、xI、ky及びkにおける前記計測データを表す。
これにより、散乱トモグラフィ装置は、送信アンテナ素子が存在する送信位置及び受信アンテナ素子が存在する受信位置に対応する計測データによって定められる上記の関係式に基づいて、画像関数を適切に導出することができる。
また、例えば、前記画像関数は、

で定められ、前記画像関数のxは、前記画像のX座標を表し、前記画像関数のyは、前記画像のY座標を表し、前記画像関数のzは、前記画像のZ座標を表し、前記画像関数における被積分関数に含まれる変数は、

で定められ、c0は、真空中の前記電波の伝搬速度を表し、a、b及びαは、前記パラメータを表す。
これにより、散乱トモグラフィ装置は、電波の周波数変化と物体の誘電率変化との対応関係を示すパラメータが反映された上記の画像関数を用いて、画像を適切に生成することができる。
また、例えば、前記散乱トモグラフィ装置は、前記送信アンテナ素子を複数備え、かつ、前記受信アンテナ素子を複数備え、前記散乱トモグラフィ装置が備える複数の送信アンテナ素子は、それぞれ、前記電波の複数の偏波方向に対応し、前記散乱トモグラフィ装置が備える複数の受信アンテナ素子は、それぞれ、前記電波の前記複数の偏波方向に対応する。
これにより、散乱トモグラフィ装置は、複数の偏波方向に基づいて、送信及び受信を行うことができる。したがって、散乱トモグラフィ装置は、偏波方向に対応する情報を取得することができる。
また、例えば、前記パラメータは、前記電波の複数の周波数に対して前記物体と同種の物体の複数の誘電率を計測することで定められる。
これにより、散乱トモグラフィ装置は、電波の周波数変化と物体の誘電率変化との対応関係を示すパラメータとして適切に定められたパラメータに基づいて、画像を適切に生成することができる。
また、例えば、前記電波は、パルス波である。
これにより、散乱トモグラフィ装置は、多数の周波数成分を有するパルス波を用いて、物体の内部を示す画像を高い精度で生成することができる。
また、例えば、本開示の一態様に係る散乱トモグラフィ方法は、送信アンテナ素子によって、物体の外部から前記物体の内部へ電波を送信するステップと、受信アンテナ素子によって、前記物体の内部へ送信された前記電波の散乱波を前記物体の外部で受信するステップと、前記受信アンテナ素子で受信された前記散乱波を示す計測データを用いて、前記物体の内部を示す画像を生成するステップとを含み、前記画像を生成するステップでは、前記電波の送信位置及び前記散乱波の受信位置が入力されて前記受信位置における前記散乱波の量が出力される散乱場関数が解である方程式を満たす関係式を、前記計測データを用いて導出し、前記関係式を用いて、前記画像を生成するための関数であり、デバイ緩和に従って前記電波の周波数変化と前記物体の誘電率変化との対応関係を示すパラメータが反映された関数である画像関数を導出し、前記画像関数を用いて、前記画像を生成する。
これにより、送信位置及び受信位置によって散乱波の量を示す散乱場関数と、受信アンテナ素子で受信された散乱波の計測データとに基づいて、画像関数を導出するための関係式を導出することが可能になる。また、画像関数には、電波の周波数変化と物体の誘電率変化との対応関係を示すパラメータが反映されている。したがって、物体の内部を示す画像の生成に、周波数変化と誘電率変化との対応関係を反映させることが可能になる。
すなわち、電波の散乱波を用いて、物体の内部を示す画像を高い精度で生成することが可能になる。
以下、図面を用いて、実施の形態について説明する。なお、以下で説明する実施の形態は、いずれも包括的又は具体的な例を示す。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序等は、一例であり、請求の範囲を限定する主旨ではない。
(実施の形態)
本実施の形態における散乱トモグラフィ装置は、電波の散乱波を用いて、物体の内部を示す画像を生成する。以下、本実施の形態における散乱トモグラフィ装置をその基礎となる技術及び理論なども含めて、詳細に説明する。なお、以下では、主に、マイクロ波マンモグラフィが想定され、電波にはマイクロ波が用いられ、物体には乳房が用いられているが、適用分野はマイクロ波マンモグラフィに限定されず、マイクロ波とは異なる電波、及び、乳房とは異なる物体が用いられてもよい。
本実施の形態における散乱トモグラフィ装置は、電波の散乱波を用いて、物体の内部を示す画像を生成する。以下、本実施の形態における散乱トモグラフィ装置をその基礎となる技術及び理論なども含めて、詳細に説明する。なお、以下では、主に、マイクロ波マンモグラフィが想定され、電波にはマイクロ波が用いられ、物体には乳房が用いられているが、適用分野はマイクロ波マンモグラフィに限定されず、マイクロ波とは異なる電波、及び、乳房とは異なる物体が用いられてもよい。
<I 誘電率の周波数依存性>
まず、散乱トモグラフィ装置によって用いられる電波に影響を与える誘電率の周波数依存性について説明する。電磁気学におけるマックスウエルの方程式は、次式(1-1)のように表現される。
まず、散乱トモグラフィ装置によって用いられる電波に影響を与える誘電率の周波数依存性について説明する。電磁気学におけるマックスウエルの方程式は、次式(1-1)のように表現される。

ここで、Eは、電場を示し、Bは、磁束密度を示し、tは、時間を示し、Hは、磁場を示し、jは、電流を示し、Dは、電束密度を示し、μは、透磁率を示し、εは、誘電率を示す。ここでは、基本的に、生体などの誘電体中を伝搬する波動(電波)を考察する。そのため、誘電率は変化するが、透磁率は真空中の値と等しい。従って、誘電率、透磁率及び電流は、次式(1-2)のように表現され得る。

ここで、ε0は、真空中の誘電率を示す。εrは、比誘電率を示す。μ0は、真空中の透磁率を示す。以上の式(1-1)及び(1-2)により、次の式(1-3)が得られる。

次に、1次元的な波を考える。波の伝搬方向をx軸、電場(E)の方向をy軸方向とすると、∇・E=0が成立するため、式(1-3)から次式(1-4)が得られる。

電場(E)のy方向成分をφ(t,x)とすると、1次元的な波に関する波動方程式を示す次式(1-5)が得られる。つまり、マックスウエルの方程式に基づいて、波動方程式が得られる。

例えば、マイクロ波マンモグラフィに用いられる周波数帯域は、分解能及び透過距離を考慮すると、1GHz~20GHzである。しかし、この領域では、生体を大きな比率で構成する水が誘電分散を起こす。
図1は、誘電率の周波数依存性を示すグラフであり、30℃における水のデバイ(Debye)緩和を示す。図1において、εr’は、複素誘電率の実部を示し、εr’’は、複素誘電率の虚部を示す。周波数が高くなると、誘電率が下がる。
図2A及び図2Bは、乳房の脂肪組織における誘電分散を示す。具体的には、図2Aは、各周波数に対する乳房の脂肪組織の比誘電率を示し、図2Bは、各周波数に対する乳房の脂肪組織の実効導電率を示す。
例えば、1~5GHzの領域に比べ、14~20GHzの領域では、誘電率が約60%の値となる。誘電率の周波数依存性は、デバイ緩和に従って、以下の式(1-6)、(1-7)、(1-8)及び(1-9)のように表現され得る。




ここで、ωは、角周波数を示す。ε(ω)は、ωにおける複素誘電率を示す。iは、虚数単位を示す。τは、緩和時間を示す。εr(ω)は、ωにおける複素誘電率の実部を示す。a、b及びαは、定数を示す。c(ω)は、ωにおける伝搬速度を示す。c0は、真空中の伝搬速度を示す。kは、波数を示す。式(1-8)のように、伝搬速度は誘電率に依存し、誘電率は周波数(角周波数)に依存する。したがって、伝搬速度は周波数(角周波数)に依存する。
周波数がfで表現される場合、ω=2πfが成立する。fについて式(1-9)を解くと、次式(1-10)が得られる。

また、ω=2πfで定められる周波数が固定のとき、波動方程式は、次式(1-11)のように表現される。

ここで、x、y及びzは、座標位置を示す。φ(t,x,y,z)は、t、x、y及びzにおける振動の変位を示す。
しかし、誘電分散がある場合には、固定周波数ではない波動を1つの波動方程式の解として表すことは困難である。これは、誘電分散の原因となる分子(双極子)の運動を同時に考慮しなければならないからである。例えば、マイクロ波マンモグラフィでは、多数の周波数成分を有するパルス波が用いられる。高精度のデータを得るため、尖った波形のパルス波が実用的である。しかしながら、多数の周波数成分が様々な伝搬速度で伝搬するため、波形が緩やかになる。したがって、高精度のデータを得ることが難しくなる。
そこで、周波数fを空間の波数kを用いて表す式(1-10)は、誘電分散がある媒質内の逆散乱問題を解くために重要な役割を果たす。また、式(1-7)におけるa、b及びαは、より具体的には、デバイモデルのパラメータであって、周波数変化と誘電率変化との対応関係を示すパラメータである。このパラメータは、事前に、各周波数に対して検査対象物と同種の試料の誘電率を測定することにより特定される。
図3は、切除試料の誘電率を測定するための測定装置を示す。図3に示された測定装置300は、誘電率の周波数依存性を実際に測定するための装置であって、ベクトルネットワークアナライザ301、コンピュータ302及び誘電率測定用プローブ306等を備える。
ベクトルネットワークアナライザ301とコンピュータ302とは、GPIB(General Purpose Interface Bus)ケーブル303を介して接続される。ベクトルネットワークアナライザ301と誘電率測定用プローブ306とは、高周波同軸ケーブル304を介して接続される。
例えば、外科手術において得られる切除試料305を同軸型の誘電率測定用プローブ306を用いて測定する。誘電率測定用プローブ306は、ベクトルネットワークアナライザ301のS11ポート(順方向反射を取得するためのポート)に接続されている。データは、GPIBケーブル303経由でコンピュータ302に格納される。複数の切除試料から、式(1-7)におけるa、b及びαが特定される。このパラメータが以下の逆解析で重要となる。
<II 誘電分散のある媒質における散乱の逆問題>
以下、電波の散乱波を用いて、物体の内部を示す画像を生成する計算処理を説明する。なお、適宜、特許文献2又は特許文献3に記載の計算処理が部分的に用いられてもよい。
以下、電波の散乱波を用いて、物体の内部を示す画像を生成する計算処理を説明する。なお、適宜、特許文献2又は特許文献3に記載の計算処理が部分的に用いられてもよい。
<II-1 曲面上のマルチスタティック逆散乱理論>
まず、1つの典型的な例として曲面上のマルチスタティック計測を取り上げ、誘電分散のある媒質における散乱の逆問題について述べる。ここでは、X座標が同じである曲線上に配置されたアレイアンテナが曲面に沿って走査すると仮定する。この仮定は、マイクロ波マンモグラフィへの応用においてかなり実際的な仮定である。
まず、1つの典型的な例として曲面上のマルチスタティック計測を取り上げ、誘電分散のある媒質における散乱の逆問題について述べる。ここでは、X座標が同じである曲線上に配置されたアレイアンテナが曲面に沿って走査すると仮定する。この仮定は、マイクロ波マンモグラフィへの応用においてかなり実際的な仮定である。
図4は、アレイアンテナが曲面上で走査し散乱データを計測する例を示す図である。図4において、アレイアンテナ401は、マルチスタティックアンテナであって、送信アンテナ素子及び受信アンテナ素子を含み、z=f(x,y)で表現される曲面に沿って走査する。なお、アレイアンテナ401は、複数の送信アンテナ素子又は複数の受信アンテナ素子を含み得る。
例えば、P1(x、y1、z1)は、送信アンテナ素子の位置を示し、P2(x、y2、z2)は、受信アンテナ素子の位置を示し、P(ξ、η、ζ)は、マイクロ波を反射する物質の位置を示す。そして、例えば、マイクロ波は、P1(x、y1、z1)から送信され、P(ξ、η、ζ)で反射し、P2(x、y2、z2)で受信される。
誘電分散があるのでω=c(ω)kである。ここで、c(ω)は伝搬速度であり、kは波数である。波長がλであるとすると、k=2π/λの関係がある。ここでは、次のような散乱場関数φを導入する。

式(2-1)において、時間の因子は、exp(-iωt)に比例すると仮定されている。また、波数はkと表現されており、P(ξ、η、ζ)における反射率は、ε(ξ、η、ζ)と表現されている。
式(2-1)に示された散乱場関数φ(x,y1,y2,z1,z2,ω)は、同一のx座標を有するYZ平面上の任意の送信位置及び任意の受信位置が入力されて受信位置における散乱波の量が出力される関数と解釈され得る。散乱場関数に入力される送信位置及び受信位置が送信アンテナ素子の位置及び受信アンテナ素子の位置にそれぞれ一致する場合、散乱場関数φの出力は、受信アンテナ素子によって得られる計測データに一致する。
そして、散乱場関数にt→0、x→x、y1→y2(=y)、及び、z1→z2(=z)を適用すると、散乱場関数は(x,y,z)において電波送信後にそこで瞬時に受信される散乱波の量、すなわち、(x,y,z)における反射の量を示すと想定される。物体の内部を示す画像を生成するための画像関数は、このような量を示す関数として以下のように導出される。
初期段階において、ε(ξ、η、ζ)が未知であるため、散乱場関数φ(x,y1,y2,z1,z2,ω)は未知である。散乱場関数φ(x,y1,y2,z1,z2,ω)の具体的な内容を求めるため、散乱場関数φ(x,y1,y2,z1,z2,ω)が満たす方程式を以下のように求める。
まず、式(2-1)の被積分項にあるカーネル関数を次式(2-2)のように表現する。

式(2-1)における散乱場関数φ(x,y1,y2,z1,z2,ω)が満たす方程式を求めるため、式(2-2)におけるカーネル関数φが解となる偏微分方程式を求める。そのためには、微分の結果によって生ずる複数の項のうち1/ρに関して高次の項を無視して計算すればよい。ここでは、微分の略記法を次式(2-3)のように定義する。

カーネル関数φの各次数の微分結果は、式(2-3)を用いて、次式(2-4)のように表現される。

式(2-4)におけるρは、ρ1及びρ2に対応する。oは、ランダウの記号であり、ρが十分に大きければ、o(ρ-3)はρ-3よりもはるかに小さい。o(ρ-3)は十分に小さいと想定されるため、以下において、繁雑なo(ρ-3)の項は省略する。式(2-4)のうち、2階微分に関する5つの式の和をとると、次式(2-5)が得られる。

さらに、式(2-5)から次式(2-6)が得られる。

式(2-6)の左辺の演算子を2回作用させると、次式(2-7)が得られる。

従って、カーネル関数φが、次式(2-8)の方程式を満たす。

これを整理すると、次式(2-9)のような方程式が得られる。

式(2-9)は、式(2-2)で示されたカーネル関数φが解となる方程式である。つまり、カーネル関数φは、式(2-9)を満たす。式(2-9)において、カーネル関数φは、式(2-1)で示された散乱場関数φに置換可能である。したがって、式(2-9)は、式(2-1)で示された散乱場関数φが解となる方程式でもある。つまり、散乱場関数φは、式(2-9)を満たす。
一方、電波の伝搬速度が周波数によって異なるので、式(2-9)から容易に時間依存の波動方程式を導くことができない。そこで、後述する擬微分作用素の方法を用いて時間依存の偏微分方程式を導く。その際、次の式(2-10)及び(2-11)のように、変数の置き換えを行う。


式(2-9)に対して式(2-10)及び(2-11)に示された置き換えを行うことで、誘電分散のある媒質中の散乱場の方程式として次式(2-12)が得られる。

式(2-11)及び(2-12)では、後述する擬微分作用素が用いられている。式(2-12)の方程式は、線形偏微分方程式であって、誘電分散がある場合の散乱場の基礎方程式である。この方程式は、周波数ごとに式(2-9)を満たす固定周波数の解を複数の周波数で合成してできる一般的な時間依存の関数を解として持つことができる。
式(2-12)の方程式の解を直接求めることは容易ではない。そこで、周波数を固定して、式(2-9)から散乱場の方程式の解を求める。周波数が固定されれば、伝搬速度が固定されるため、式(2-9)から時間依存の波動方程式が得られる。具体的には、式(2-9)に対して、次の式(2-13)のように、変数の置き換えを行う。ここで、cは、固定周波数における電波の伝搬速度を示す。

上記の置き換えによって、固定周波数における時間依存の波動方程式として式(2-14)が得られる。

各波数kに関して式(2-9)を解くため、式(2-9)から導出された式(2-14)におけるφに対して、次式(2-15)に示されるような、t、x、y1及びy2に関する多重フーリエ変換を行う。

∂z1、∂z2の代わりにDz1、Dz2と書くと、式(2-14)及び(2-15)から、次式(2-16)の方程式が得られる。

式(2-16)の基本解は、次式(2-17)のように表現される。

ここで、s1及びs2は、次式(2-18)のように決定される関数である。

式(2-18)におけるs1(kx、ky1、ky2)及びs2(kx、ky1、ky2)を用いて、各波数kに関する式(2-9)の解は、次式(2-19)のように表現され得る。

次に、式(2-19)における関数a(kx,ky1,ky2,k)と計測データとを関連付ける。
図5は、送信アンテナ素子の位置と受信アンテナ素子の位置と物質の位置との関係を示す模式図である。例えば、マイクロ波は、送信アンテナ素子の位置であるPI(x、yI、zJ)から送信され、物質の位置であるP(ξ、η、ζ)で反射し、受信アンテナ素子の位置であるPJ(x、yJ、zJ)で受信される。図5に示された断面曲線Sは、図4に示されたアレイアンテナ401の走査面のy-z断面を示す。
xを固定した断面曲線Sの方程式を例えば次式(2-20)のように仮定する。なお、ここでは、図4に示されたアレイアンテナ401の走査面がx方向に曲がっておらず、走査面のy-z断面が次式で与えられると仮定する。

曲面上でφ(x,y1,y2,f(y1),f(y2),k)の値が得られているとすると、式(2-19)から次式(2-21)の積分方程式が得られる。

次に、積分方程式(2-21)の解を求める。曲面上の点PI、PJで測定されたφ(x,yI,yJ,zI,zJ,t)をフーリエ変換した関数Φ(kx,yI,yJ,k)は、次式(2-22)のように表現され得る。

ここで、zI、zJは断面曲線上にあるので、次式(2-23)が成立する。

式(2-21)、式(2-22)及び式(2-23)の組み合わせから、次式(2-24)が得られる。

式(2-24)は、送信アンテナ素子のY座標であるyI、及び、受信アンテナ素子のY座標であるyJに着目することで、次式(2-25)のように変形可能である。ここで、(x,yI,zI)、(x,yJ,zJ)は、基準となる直交座標系での計測点の位置(送信アンテナ素子及び受信アンテナ素子の位置)であり、δは、デルタ関数を示す。

式(2-25)の両辺のフーリエ変換をとると次式(2-26)が得られる。

積分の結果、式(2-27)が得られる。

式(2-27)から、aI,Jが、次式(2-28)のように求まる。

全てのI、Jに関して、式(2-28)の和を求めると、次式(2-29)が得られる。

式(2-19)及び(2-29)で表現される関係式が式(2-9)の解として得られる。言い換えれば、式(2-19)及び(2-29)で表現される関係式は、式(2-9)を満たす関係式であり、式(2-9)の解を示す関係式である。なお、式(2-19)では、kが用いられているが、式(1-9)に基づいて、kはωに変換可能である。
式(2-19)及び(2-29)で表現される関係式にt→0、x→x、y1→y2(=y)、及び、z1→z2(=z)を適用することで、電波送信後にそこで瞬時に受信される散乱波の量を示す関数が得られる。次式(2-30)は、このような関数に対応する。再構成画像は、次式(2-30)をkまたはωについて積分して求まる。

そのために次式(2-31)のようにkzなる変数を導入する。なお、次式(2-31)には、kをkzで表す式及びkをkzで微分した関数も示されている。

式(1-10)から、波数kと周波数ωとの関係は、次式(2-32)及び(2-33)で与えられる。


a(kx,ky1,ky2,k)の定義に含まれる測定データΦ(kx,yI,yJ,k)はkではなくωで与えられるので上記のようなk-ω変換が必要となる。これにより、誘電分散の式(1-9)が取り込まれる。式(2-30)をωについて積分して得られる再構成画像は、次式(2-34)のように導出される。次式(2-34)は、再構成画像を生成するための画像関数とも表現され得る。

式(2-34)の被積分関数にある変数をまとめると、これらの変数は次式(2-35)のように表現される。

以上が曲面上で散乱データを計測して領域内部の3次元画像を得る再構成理論の詳細である。
<II-2 曲面上のモノスタティック逆散乱理論>
図6は、モノスタティックアンテナが曲面上で走査し散乱データを計測する例を示す図である。この例において、モノスタティックアンテナ601は、送信アンテナ素子と受信アンテナ素子とを結合し、曲面に沿って走査する。また、モノスタティックアンテナ601の送信アンテナ素子及び受信アンテナ素子は、同一点に位置すると仮定する。つまり、モノスタティックアンテナ601は、同一点で送信及び受信を行う。
図6は、モノスタティックアンテナが曲面上で走査し散乱データを計測する例を示す図である。この例において、モノスタティックアンテナ601は、送信アンテナ素子と受信アンテナ素子とを結合し、曲面に沿って走査する。また、モノスタティックアンテナ601の送信アンテナ素子及び受信アンテナ素子は、同一点に位置すると仮定する。つまり、モノスタティックアンテナ601は、同一点で送信及び受信を行う。
モノスタティックアンテナ601は、x軸方向へ曲線に沿って走査し、その後、y軸方向へ変位し、再度、x軸方向へ曲線に沿って走査する。モノスタティックアンテナ601は、これらを繰り返すことにより、曲面に沿って走査する。例として、y軸方向に対して直線上で、かつ、x軸方向に対してz=f(x)の曲線上で、データが得られる。そして、境界条件が曲面上で与えられる。
基本的に、アレイアンテナ401に関して上述された理論は、モノスタティックアンテナ601に関しても適用され得る。しかしながら、モノスタティックアンテナ601では、同一点で送信及び受信が行われるため、計算式が異なる。
図7は、送受信の位置と物質の位置との関係を示す模式図である。図7に示された断面曲線Sは、図6に示されたモノスタティックアンテナ601の走査面のx-z断面を示す。モノスタティックアンテナ601は、x軸方向へ、z=f(x)で定められる曲線Sに沿って走査する。つまり、送受信の位置であって計測点の位置であるPI(xI、y、zI)は、断面曲線S上を動く。
曲線S上の点PIで放射され、点Pで反射した後、再び点PIで受信される波動を考える。例えば、マイクロ波は、PI(xI、y、zI)から放射され、P(ξ、η、ζ)で反射し、PI(xI、y、zI)で受信される。散乱強度を示す散乱場関数φは次式(3-1)のように書くことができる。

また、式(3-1)の散乱場関数は、次式(3-2)のように表現される方程式を満たす。つまり、式(3-1)の散乱場関数は、次式(3-2)を満たす。

kとωとの関係は次式(3-3)で与えられる。

時間依存の散乱場の方程式は、次式(3-4)のように表現される。

周波数を固定した散乱場の方程式の一般解は、次式(3-5)で与えられる。ここで、kxは、散乱場関数φのxに関する波数であり、kyは、散乱場関数φのyに関する波数である。

走査面に対応する曲面の方程式は、次式(3-6)のように表現される。

ここで、a(kx,ky,k)は、曲面上の測定値を境界条件として用いることにより、次式(3-7)のように求まる。

ここで、

は、xI、ky及びkにおける散乱データの測定値である。
Φ(x,y,ω)を散乱データの時間に関するフーリエ像とすると、次式(3-8)のように表現される映像化関数が得られる。

ここで、次式(3-9)の関係がある。誘電率の分散性は、ωとkとを結びつける際に生ずる。

<III UWBマイクロ波レーダ装置の概要>
次に、マルチスタティックアレイレーダのシステムの概要を説明する。
次に、マルチスタティックアレイレーダのシステムの概要を説明する。
図8は、マルチスタティックアレイレーダの全体システム構成を示す図である。
マイクロ波の信号は、DC~20GHzの周波数成分を持った擬似ランダム時系列信号(PN符号:Pseudo Noise Code)である。この信号は、PN符号生成用FPGAボード1002から出力される。より具体的には、この信号は2種類ある。一方の種類の信号(LO信号:local oscillator signal)は、遅延回路(デジタル制御ボード1003)を通してRF検波回路(RF検波ボード1007)へ送られる。
他方の種類の信号(RF信号:Radio Frequency Signal)は、マルチスタティックアレイアンテナ1008の送信用マイクロ波UWBアンテナへ送られ放射される。マイクロ波の散乱信号がマルチスタティックアレイアンテナ1008の受信用UWBアンテナで受信され、RF検波回路(RF検波ボード1007)へ送られる。ここで送受信信号はアンテナ素子選択スイッチ(UWBアンテナRFスイッチ1004)を通る。
また、遅延される信号(LO信号)は、PN符号の値が変化する時間の1/2n倍(nは2よりも大きい整数)の時間ずつ遅延される。検波した信号は、IF信号(Intermediate Frequency Signal)として、信号処理計算機1005でA/D変換され記憶される。また、検波した信号を示す情報が、信号モニタ装置1006に表示されてもよい。
これら一連の動作のタイミングは、距離計1001からの信号(距離信号又はフリーラン信号)に同期するように、デジタル制御ボード1003内のマイクロプロセッサによって制御される。例えば、デジタル制御ボード1003内のマイクロプロセッサは、Switch切替信号、及び、PN符号掃引トリガ等を送信する。
また、信号処理計算機1005は、A/D変換され記憶された信号を用いて、3次元再構成を行い、3次元画像表示を行う。また、信号処理計算機1005は、信号校正を行ってもよい。また、信号処理計算機1005は、生波形表示を行ってもよい。
次にUWBアンテナについて説明する。
図9は、直線上あるいは曲線上に一列に配置したアレイアンテナを示す図である。図9において、アレイアンテナは、リニアアレイアンテナであって、ライン上に配置されたn+1個のアンテナ素子を備え、n+1個のアンテナ素子のうち、1個が送信用であり、n個が受信用である。図9において、送信用の1個のアンテナ素子にTのラベルが付されており、受信用のn個のアンテナ素子にR(R1、R2、・・・Rn)のラベルが付されている。
図9において、Aのラベルが付されている部分は、電波吸収材に対応する。送信用のアンテナ素子と受信用のアンテナ素子との間に電波吸収材を配置することによりUWBアンテナとしての性能が向上する。TとRとは交換可能であり、n+1個のアンテナ素子のうち、n個が送信用であり、1個が受信用であってもよい。TとRとが交換されても、同等の散乱データが取得され得る。
nの数値は、検査対象物に応じて変更されてもよい。走査方向は図中の矢印の方向である。例えば、z=0の平面へ投影して、アレイアンテナを構成する複数のアンテナ素子を配置してある方向をy軸方向、走査方向をx軸方向と規定する。この場合において、アレイアンテナが走査するラインを少しずつずらして(例えばアンテナ素子のサイズの1/2ずつy軸方向へずらして)散乱データを計測することで、計測の時間を要するが、分解能が向上する。
図10は、図9に示されたアレイアンテナによって行われる走査方法を示す図である。図10におけるアレイアンテナは、1個の送信アンテナ素子と、3個の受信アンテナ素子とを含む。そして、アレイアンテナは、走査LINE1、走査LINE2、走査LINE3、・・・、走査LINEnのように、アンテナ素子のサイズの1/2ずつy軸方向へずらして、走査する。
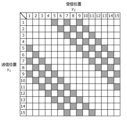
図11は、図10に示された走査方法における計測点を示す図である。具体的には、1個の送信アンテナ素子と3個の受信アンテナ素子とを含むアレイアンテナの走査LINEをアンテナ素子のサイズの1/2ずつy方向へずらすことで散乱データが計測される送信位置のY座標と受信位置のY座標との組み合わせが斜線で示されている。また、送信位置のY座標がy1として表現され、受信位置のY座標がy2として表現されている。
また、1個のブロックの1辺の長さは、アンテナ素子のサイズの1/2に対応しており、y1及びy2のそれぞれを示す数値は、アンテナ素子のサイズの1/2の単位で表現されている。したがって、例えば、送信アンテナ素子のY座標が1である場合、3個の受信アンテナ素子の3個のY座標は、5、7及び9である。また、例えば、送信アンテナ素子のY座標が2である場合、3個の受信アンテナ素子の3個のY座標は、6、8及び10である。
また、送信アンテナ素子の位置と受信アンテナ素子の位置とを入れ替えても同じ散乱データが得られる。したがって、行列(y1,y2)は対称性を有する。対角線より左側も計測点として埋められる。このように得られる散乱データが、画像再構成に用いられる。
図12は、直交する2つの偏波方向の両方に関して電波を計測できるモノスタティックアンテナの実現例を示す図である。
図12において、T1のラベルが付された送信アンテナ素子とR1のラベルが付された受信アンテナ素子との間、及び、T2のラベルが付された送信アンテナ素子とR2のラベルが付された受信アンテナ素子との間に、Aのラベルが付された共通の電波吸収材が配置されている。そして、散乱データの計測に、T1とR1との組み合わせ、及び、T2とR2との組み合わせが用いられる。
上記の構成により、2つの偏波方向に対応する散乱データの計測が可能である。例えば、特定の偏波方向に反応する物質などの情報を得ることが可能である。そして、上記の構成により、複数の送信アンテナ素子と複数の受信アンテナ素子とが一対一に対応するモノスタティックアンテナが実現され得る。
なお、走査方向は、図中の矢印のように、直交する2つの方向に対応していてもよい。
<IV 擬微分作用素>
次に、偏微分方程式論における擬微分作用素について説明する。ここでは、n次元ユークリッド空間Rnにおける関数を扱う。そのため、次式(4-1)に示される記号を用いる。
次に、偏微分方程式論における擬微分作用素について説明する。ここでは、n次元ユークリッド空間Rnにおける関数を扱う。そのため、次式(4-1)に示される記号を用いる。

定数係数の線形微分作用素を次式(4-2)のように仮定する。

式(4-2)の線形微分作用素をRn上のコンパクト台付き滑らかな関数uに作用させることで、式(4-3)が得られる。

式(4-3)をフーリエ変換すると、symbol(表象)と呼ばれる多項式による単純な掛算になることは良く知られている。次式(4-4)は、この多項式を示す。

式(4-4)を逆フーリエ変換すると、次式(4-5)が得られる。

式(4-5)を一般化し、symbolがxを含む一般的な多項式である場合にも適用され得る作用素P(x,D)を次式(4-6)のように定義する。

式(4-6)のP(x,D)を擬微分作用素という。また、次式(4-7)のように表現される偏微分方程式をu(x)について解く。

式(4-7)の両辺をフーリエ変換すると、次式(4-8)が得られる。

式(4-8)から、次式(4-9)のような関係式が得られる。

式(4-9)の逆フーリエ変換を書くと、次式(4-10)のように表現される。

式(4-10)のP(D)も擬微分作用素であり、次式(4-11)のような記述が可能である。

上記に示されたように、擬微分作用素によって、通常の微分作用素の有理多項式及び非整数べき乗などの概念を導入することが可能である。
<V 誘電分散のシミュレーション>
次に、誘電分散の影響に関するシミュレーションを示す。
次に、誘電分散の影響に関するシミュレーションを示す。
<V-1 分散性媒質中の波動方程式>
シミュレーションにおいて、媒質の分散性がデバイモデルで記述され得るような場合を考察する。
シミュレーションにおいて、媒質の分散性がデバイモデルで記述され得るような場合を考察する。
モノスタティックの場合を対象にシミュレーションを行う。誘電率に分散性がある1次元空間における電磁波(電波)の伝搬は、次式(5-1)のような擬微分方程式で記述され得る。

ここで、c0は、真空中の電磁波(電波)の速度である。時間微分の項の(ファクター)4は、モノスタティック逆散乱を考える場合、波動が同じ経路を2度通ることに基づく。
図13は、誘電率分散が大きい場合における比誘電率と周波数との関係を示す図である。図13において示される比誘電率と周波数との関係は、a=1、b=7、及び、α=0.0001に基づいている。
図14A、図14B、図14C、図14D及び図14Eは、誘電分散のある場合の電波のシミュレーション結果を示す図である。縦軸は振幅、横軸は距離x(cm)である。各図の時間tは、t=0.2nナノ秒(n=0,1,2,3,4)である。図14A、図14B、図14C、図14D及び図14Eから、釣鐘状の波形が時間とともに崩れていくことが分かる。
<V-2 誘電分散のある媒質中での再構成>
モノスタティック逆散乱解析の場合を考察する。散乱の逆問題の方程式は、次式(6-1)である。
モノスタティック逆散乱解析の場合を考察する。散乱の逆問題の方程式は、次式(6-1)である。

波数kと角周波数ωとの関係は、次式(6-2)で与えられる。

以下において、誘電分散性のある媒質中で、電波を放射して散乱データを測定した結果をもとに、誘電分散を無視して逆解析したらどのようになるかを示す。
図15は、計算モデルを示す図である。計算モデルに含まれる解析対象モデルは、3D空間中の深さ1cmの平面上に置かれた互いに0.8cm離れた3点である。この計算モデルにおいて、x軸方向の計測点の数は、NX=128であり、y軸方向の計測点の数は、NY=64であり、x軸方向の計測点の間隔は、dx=0.1cmであり、y軸方向の計測点の間隔は、dy=0.1cmである。
図16Aは、第1ケースのシミュレーションの結果を示すz(深さ)=1cmのXY平面図であり、図16Bは、第1ケースのシミュレーションの結果を示す斜視図である。具体的には、図16A及び図16Bは、5GHzで比誘電率が7.5であり、14GHzで比誘電率が5.0である場合のシミュレーションの結果を示す。
図17Aは、第2ケースのシミュレーションの結果を示すz(深さ)=1cmのXY平面図であり、図17Bは、第2ケースのシミュレーションの結果を示す斜視図である。具体的には、図17A及び図17Bは、5GHzで比誘電率が6.5であり、14GHzで比誘電率が5.5である場合のシミュレーションの結果を示す。
図18Aは、第3ケースのシミュレーションの結果を示すz(深さ)=1cmのXY平面図であり、図18Bは、第3ケースのシミュレーションの結果を示す斜視図である。具体的には、図18A及び図18Bは、5GHzで比誘電率が6であり、14GHzで比誘電率が6である場合のシミュレーションの結果を示す。
第3ケースのシミュレーションの結果は、誘電分散性が無い媒質中での逆散乱解析の結果に対応する。通常の生体(乳房)の組織において誘電率を測定した結果は、第2ケースの分散性に近い。誘電分散性を無視すると明らかに画像の分解能が低下している。
以上の解析は、モノスタティック散乱場解析に対応する。しかし、同様の内容がマルチスタティック散乱場解析についても適用され得る。従って、散乱場解析においては誘電分散性の考慮は重要である。
<VI 結び>
上述された内容に基づいて、以下に、電波の散乱波を用いて物体の内部を示す画像を生成する散乱トモグラフィ装置の構成及び動作を簡潔に示す。
上述された内容に基づいて、以下に、電波の散乱波を用いて物体の内部を示す画像を生成する散乱トモグラフィ装置の構成及び動作を簡潔に示す。
図19は、本実施の形態における散乱トモグラフィ装置の基本構成図である。図19に示された散乱トモグラフィ装置100は、送信アンテナ素子101、受信アンテナ素子102及び情報処理回路103を備える。
送信アンテナ素子101は、電波を送信する回路である。具体的には、送信アンテナ素子101は、物体の外部から物体の内部へ電波を送信する。電波は、マイクロ波、ミリ波又はテラヘルツ波等であってもよい。物体は、生体、製造物又は自然素材などであってもよい。特に、物体は、乳房であってもよい。散乱トモグラフィ装置100は、複数の送信アンテナ素子101を備えていてもよい。
受信アンテナ素子102は、電波の散乱波等である電波を受信する回路である。具体的には、受信アンテナ素子102は、物体の内部へ送信された電波の散乱波を物体の外部で受信する。散乱トモグラフィ装置100は、複数の受信アンテナ素子102を備えていてもよい。また、受信アンテナ素子102は、送信アンテナ素子101と実質的に同じ位置に配置されてもよいし、送信アンテナ素子101とは異なる位置に配置されてもよい。
また、送信アンテナ素子101と受信アンテナ素子102とは、マルチスタティックアンテナを構成していてもよいし、モノスタティックアンテナを構成していてもよい。
情報処理回路103は、情報処理を行う回路である。具体的には、情報処理回路103は、受信アンテナ素子102で受信された散乱波を示す計測データを用いて、物体の内部を示す画像を生成する。情報処理回路103は、コンピュータ、又は、コンピュータのプロセッサであってもよい。情報処理回路103は、メモリからプログラムを読み出し、プログラムを実行することにより情報処理を行ってもよい。また、情報処理回路103は、計測データを用いて、物体の内部を示す画像を生成する専用回路であってもよい。
例えば、情報処理回路103は、図8に示された複数の構成要素のうちの1つ以上に対応していてもよい。具体的には、例えば、情報処理回路103は、信号処理計算機1005に対応していてもよい。また、情報処理回路103は、生成された画像を液晶ディスプレイ装置等の表示装置に表示してもよい。
図20は、図19に示された散乱トモグラフィ装置100の基本動作を示すフローチャートである。具体的には、図19に示された散乱トモグラフィ装置100の送信アンテナ素子101、受信アンテナ素子102及び情報処理回路103が、図20に示された動作を行う。
まず、送信アンテナ素子101は、物体の外部から物体の内部へ電波を送信する(S201)。次に、受信アンテナ素子102は、物体の内部へ送信された電波の散乱波を物体の外部で受信する(S202)。そして、情報処理回路103は、受信アンテナ素子102で受信された散乱波を示す計測データを用いて、物体の内部を示す画像を生成する(S203)。
情報処理回路103は、計測データを用いて画像を生成する際、まず、散乱場関数が解である方程式を満たす関係式を、計測データを用いて導出する。散乱場関数は、電波の送信位置及び前記散乱波の受信位置が入力されて受信位置における散乱波の量が出力される関数である。すなわち、散乱場関数は、任意に定められる送信位置及び受信位置に対して受信位置における散乱波の量を示す関数である。
そして、情報処理回路103は、導出された関係式を用いて、画像関数を導出する。画像関数は、画像を生成するための関数であり、デバイ緩和に従って電波の周波数変化と物体の誘電率変化との対応関係を示すパラメータが反映された関数である。そして、情報処理回路103は、画像関数を用いて、物体の内部を示す画像を生成する。
これにより、散乱トモグラフィ装置100は、送信位置及び受信位置によって散乱波の量を示す散乱場関数と、受信アンテナ素子102で受信された散乱波の計測データとに基づいて、画像関数を導出するための関係式を導出することができる。また、画像関数には、電波の周波数変化と物体の誘電率変化との対応関係を示すパラメータが反映されている。したがって、散乱トモグラフィ装置100は、物体の内部を示す画像の生成に、周波数変化と誘電率変化との対応関係を反映させることができる。
すなわち、散乱トモグラフィ装置100は、電波の散乱波を用いて、物体の内部を示す画像を高い精度で生成することができる。
例えば、上記の基本構成及び基本動作において示された送信アンテナ素子101、受信アンテナ素子102、情報処理回路103、散乱場関数、方程式、関係式、画像関数及びパラメータ等には、本実施の形態において示された構成要素、式及び変数等が適宜適用され得る。
また、本実施の形態において示された散乱場関数、方程式、関係式及び画像関数等は、適宜変形して適用されてもよい。例えば、上述された数式と実質的に同じ内容を他の表現で示す数式が用いられてもよいし、上述された理論に基づいて導出される他の数式が用いられてもよい。
また、例えば、電波は、複数の周波数成分を有する。電波は、パルス波であってもよいし、パルス波でなくてもよい。
(補足)
以上、散乱トモグラフィ装置の態様を実施の形態に基づいて説明したが、散乱トモグラフィ装置の態様は、実施の形態に限定されない。実施の形態に対して当業者が思いつく変形が施されてもよいし、実施の形態における複数の構成要素が任意に組み合わされてもよい。例えば、実施の形態において特定の構成要素によって実行される処理を特定の構成要素の代わりに別の構成要素が実行してもよい。また、複数の処理の順序が変更されてもよいし、複数の処理が並行して実行されてもよい。
以上、散乱トモグラフィ装置の態様を実施の形態に基づいて説明したが、散乱トモグラフィ装置の態様は、実施の形態に限定されない。実施の形態に対して当業者が思いつく変形が施されてもよいし、実施の形態における複数の構成要素が任意に組み合わされてもよい。例えば、実施の形態において特定の構成要素によって実行される処理を特定の構成要素の代わりに別の構成要素が実行してもよい。また、複数の処理の順序が変更されてもよいし、複数の処理が並行して実行されてもよい。
また、散乱トモグラフィ装置の各構成要素が行うステップを含む散乱トモグラフィ方法が任意の装置又はシステムによって実行されてもよい。例えば、散乱トモグラフィ方法の一部又は全部が、プロセッサ、メモリ及び入出力回路等を備えるコンピュータによって実行されてもよい。その際、コンピュータに散乱トモグラフィ方法を実行させるためのプログラムがコンピュータによって実行されることにより、散乱トモグラフィ方法が実行されてもよい。
また、非一時的なコンピュータ読み取り可能な記録媒体に、上記のプログラムが記録されていてもよい。
また、散乱トモグラフィ装置の各構成要素は、専用のハードウェアで構成されてもよいし、上記のプログラム等を実行する汎用のハードウェアで構成されてもよいし、これらの組み合わせで構成されてもよい。また、汎用のハードウェアは、プログラムが記録されたメモリ、及び、メモリからプログラムを読み出して実行する汎用のプロセッサ等で構成されてもよい。ここで、メモリは、半導体メモリ又はハードディスク等でもよいし、汎用のプロセッサは、CPU等でもよい。
また、専用のハードウェアが、メモリ及び専用のプロセッサ等で構成されてもよい。例えば、専用のプロセッサが、計測データを記録するためのメモリを参照して、上記の散乱トモグラフィ方法を実行してもよい。
また、散乱トモグラフィ装置の各構成要素は、電気回路であってもよい。これらの電気回路は、全体として1つの電気回路を構成してもよいし、それぞれ別々の電気回路であってもよい。また、これらの電気回路は、専用のハードウェアに対応していてもよいし、上記のプログラム等を実行する汎用のハードウェアに対応していてもよい。
本開示の一態様は、電波の散乱波を用いて、物体の内部を示す画像を生成する散乱トモグラフィ装置に有用であり、物理探査又は医療診断等に適用可能である。
100 散乱トモグラフィ装置
101 送信アンテナ素子
102 受信アンテナ素子
103 情報処理回路
300 測定装置
301 ベクトルネットワークアナライザ
302 コンピュータ
303 GPIBケーブル
304 高周波同軸ケーブル
305 切除試料
306 誘電率測定用プローブ
401 アレイアンテナ
601 モノスタティックアンテナ
1001 距離計
1002 PN符号生成用FPGAボード
1003 デジタル制御ボード
1004 UWBアンテナRFスイッチ
1005 信号処理計算機
1006 信号モニタ装置
1007 RF検波ボード
1008 マルチスタティックアレイアンテナ
101 送信アンテナ素子
102 受信アンテナ素子
103 情報処理回路
300 測定装置
301 ベクトルネットワークアナライザ
302 コンピュータ
303 GPIBケーブル
304 高周波同軸ケーブル
305 切除試料
306 誘電率測定用プローブ
401 アレイアンテナ
601 モノスタティックアンテナ
1001 距離計
1002 PN符号生成用FPGAボード
1003 デジタル制御ボード
1004 UWBアンテナRFスイッチ
1005 信号処理計算機
1006 信号モニタ装置
1007 RF検波ボード
1008 マルチスタティックアレイアンテナ
Claims (16)
- 物体の外部から前記物体の内部へ電波を送信する送信アンテナ素子と、
前記物体の内部へ送信された前記電波の散乱波を前記物体の外部で受信する受信アンテナ素子と、
前記受信アンテナ素子で受信された前記散乱波を示す計測データを用いて、前記物体の内部を示す画像を生成する情報処理回路とを備え、
前記情報処理回路は、
前記電波の送信位置及び前記散乱波の受信位置が入力されて前記受信位置における前記散乱波の量が出力される散乱場関数が解である方程式を満たす関係式を、前記計測データを用いて導出し、
前記関係式を用いて、前記画像を生成するための関数であり、デバイ緩和に従って前記電波の周波数変化と前記物体の誘電率変化との対応関係を示すパラメータが反映された関数である画像関数を導出し、
前記画像関数を用いて、前記画像を生成する
散乱トモグラフィ装置。 - X座標、Y座標及びZ座標で構成される3次元空間において、前記送信アンテナ素子の配置位置のX座標は、前記受信アンテナ素子の配置位置のX座標と同じであり、
前記散乱場関数は、

請求項1に記載の散乱トモグラフィ装置。 - 前記方程式は、

請求項2に記載の散乱トモグラフィ装置。 - 前記関係式は、


請求項3に記載の散乱トモグラフィ装置。 - 前記画像関数は、


請求項4に記載の散乱トモグラフィ装置。 - 前記情報処理回路は、前記送信アンテナ素子の配置位置及び前記受信アンテナ素子の配置位置で得られる前記計測データを前記送信アンテナ素子の配置位置と前記受信アンテナ素子の配置位置とを入れ替えて得られるデータとしても用いて、前記画像を生成する
請求項1~5のいずれか1項に記載の散乱トモグラフィ装置。 - 前記散乱トモグラフィ装置は、前記受信アンテナ素子を複数備え、
前記情報処理回路は、前記散乱トモグラフィ装置が備える複数の受信アンテナ素子のそれぞれで受信された前記散乱波を示す前記計測データを用いて、前記画像を生成する
請求項1~6のいずれか1項に記載の散乱トモグラフィ装置。 - 前記送信アンテナ素子と前記複数の受信アンテナ素子とは、一列に並び、
前記送信アンテナ素子は、前記送信アンテナ素子と前記複数の受信アンテナ素子とが並ぶ前記一列の端に位置し、
前記送信アンテナ素子と、前記複数の受信アンテナ素子のセットとの間に、電波吸収材が配置される
請求項7に記載の散乱トモグラフィ装置。 - X座標、Y座標及びZ座標で構成される3次元空間において、前記送信アンテナ素子の配置位置のX座標、Y座標及びZ座標は、それぞれ、前記受信アンテナ素子の配置位置のX座標、Y座標及びZ座標と同じであり、
前記散乱場関数は、

請求項1に記載の散乱トモグラフィ装置。 - 前記方程式は、

請求項9に記載の散乱トモグラフィ装置。 - 前記関係式は、



請求項10に記載の散乱トモグラフィ装置。 - 前記画像関数は、


請求項11に記載の散乱トモグラフィ装置。 - 前記散乱トモグラフィ装置は、前記送信アンテナ素子を複数備え、かつ、前記受信アンテナ素子を複数備え、
前記散乱トモグラフィ装置が備える複数の送信アンテナ素子は、それぞれ、前記電波の複数の偏波方向に対応し、
前記散乱トモグラフィ装置が備える複数の受信アンテナ素子は、それぞれ、前記電波の前記複数の偏波方向に対応する
請求項1に記載の散乱トモグラフィ装置。 - 前記パラメータは、前記電波の複数の周波数に対して前記物体と同種の物体の複数の誘電率を計測することで定められる
請求項1~13のいずれか1項に記載の散乱トモグラフィ装置。 - 前記電波は、パルス波である
請求項1~14のいずれか1項に記載の散乱トモグラフィ装置。 - 送信アンテナ素子によって、物体の外部から前記物体の内部へ電波を送信するステップと、
受信アンテナ素子によって、前記物体の内部へ送信された前記電波の散乱波を前記物体の外部で受信するステップと、
前記受信アンテナ素子で受信された前記散乱波を示す計測データを用いて、前記物体の内部を示す画像を生成するステップとを含み、
前記画像を生成するステップでは、
前記電波の送信位置及び前記散乱波の受信位置が入力されて前記受信位置における前記散乱波の量が出力される散乱場関数が解である方程式を満たす関係式を、前記計測データを用いて導出し、
前記関係式を用いて、前記画像を生成するための関数であり、デバイ緩和に従って前記電波の周波数変化と前記物体の誘電率変化との対応関係を示すパラメータが反映された関数である画像関数を導出し、
前記画像関数を用いて、前記画像を生成する
散乱トモグラフィ方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019142379 | 2019-08-01 | ||
| JP2019142379 | 2019-08-01 | ||
| PCT/JP2020/028880 WO2021020387A1 (ja) | 2019-08-01 | 2020-07-28 | 散乱トモグラフィ装置及び散乱トモグラフィ方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021020387A1 JPWO2021020387A1 (ja) | 2021-02-04 |
| JP7464293B2 true JP7464293B2 (ja) | 2024-04-09 |
Family
ID=74229093
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021535353A Active JP7464293B2 (ja) | 2019-08-01 | 2020-07-28 | 散乱トモグラフィ装置及び散乱トモグラフィ方法 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US20220268711A1 (ja) |
| EP (1) | EP4009040A4 (ja) |
| JP (1) | JP7464293B2 (ja) |
| KR (1) | KR20220041088A (ja) |
| CN (1) | CN114144108A (ja) |
| AU (1) | AU2020323417A1 (ja) |
| CA (1) | CA3148045A1 (ja) |
| IL (1) | IL289641B1 (ja) |
| SA (1) | SA522431510B1 (ja) |
| TW (1) | TW202111572A (ja) |
| WO (1) | WO2021020387A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022260112A1 (ja) | 2021-06-11 | 2022-12-15 | 株式会社 Integral Geometry Science | 映像化装置及び映像化方法 |
| US20240295506A1 (en) | 2021-06-17 | 2024-09-05 | Kenjiro Kimura | Imaging device and imaging method |
| WO2023119369A1 (ja) * | 2021-12-20 | 2023-06-29 | 株式会社三井E&Sマシナリー | データ処理方法、計測システム、及び、プログラム |
| JP7247429B1 (ja) * | 2021-12-20 | 2023-03-28 | 株式会社三井E&Sマシナリー | データ処理方法、計測システム、及び、プログラム |
| JP7300077B1 (ja) * | 2021-12-20 | 2023-06-29 | 株式会社三井E&S | データ処理方法、計測システム、及び、プログラム |
| WO2024034000A1 (ja) * | 2022-08-09 | 2024-02-15 | 株式会社三井E&S | データ処理方法、計測システム、及び、プログラム |
| WO2024033998A1 (ja) * | 2022-08-09 | 2024-02-15 | 株式会社三井E&S | データ処理方法、計測システム、及び、プログラム |
| WO2024190178A1 (ja) * | 2023-03-10 | 2024-09-19 | 文俊 木村 | 映像化装置及び映像化方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060241409A1 (en) | 2005-02-11 | 2006-10-26 | Winters David W | Time domain inverse scattering techniques for use in microwave imaging |
| WO2015136936A1 (ja) | 2014-03-12 | 2015-09-17 | 国立大学法人神戸大学 | 散乱トモグラフィ方法および散乱トモグラフィ装置 |
| WO2017057524A1 (ja) | 2015-09-29 | 2017-04-06 | 国立大学法人神戸大学 | 画像化方法および画像化装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3531893A1 (de) | 1985-09-06 | 1987-03-19 | Siemens Ag | Verfahren zur bestimmung der verteilung der dielektrizitaetskonstanten in einem untersuchungskoerper sowie messanordnung zur durchfuehrung des verfahrens |
| EP2957925B1 (en) * | 2013-02-12 | 2016-11-23 | National University Corporation Kobe University | Scattering tomography method and scattering tomography device |
| US9111334B2 (en) * | 2013-11-01 | 2015-08-18 | Ellumen, Inc. | Dielectric encoding of medical images |
| GB2547883B (en) * | 2016-01-18 | 2019-12-04 | Medical Wireless Sensing Ltd | Microwave tomography system |
-
2020
- 2020-07-28 IL IL289641A patent/IL289641B1/en unknown
- 2020-07-28 CA CA3148045A patent/CA3148045A1/en active Pending
- 2020-07-28 JP JP2021535353A patent/JP7464293B2/ja active Active
- 2020-07-28 US US17/625,844 patent/US20220268711A1/en active Pending
- 2020-07-28 CN CN202080052171.2A patent/CN114144108A/zh active Pending
- 2020-07-28 WO PCT/JP2020/028880 patent/WO2021020387A1/ja active Application Filing
- 2020-07-28 AU AU2020323417A patent/AU2020323417A1/en active Pending
- 2020-07-28 TW TW109125432A patent/TW202111572A/zh unknown
- 2020-07-28 KR KR1020227002325A patent/KR20220041088A/ko unknown
- 2020-07-28 EP EP20847008.8A patent/EP4009040A4/en active Pending
-
2022
- 2022-01-26 SA SA522431510A patent/SA522431510B1/ar unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060241409A1 (en) | 2005-02-11 | 2006-10-26 | Winters David W | Time domain inverse scattering techniques for use in microwave imaging |
| WO2015136936A1 (ja) | 2014-03-12 | 2015-09-17 | 国立大学法人神戸大学 | 散乱トモグラフィ方法および散乱トモグラフィ装置 |
| WO2017057524A1 (ja) | 2015-09-29 | 2017-04-06 | 国立大学法人神戸大学 | 画像化方法および画像化装置 |
Non-Patent Citations (2)
| Title |
|---|
| 桑原 義彦,「第4章 X線被爆のリスクを回避し,安全で確実な乳癌検診を実現する マイクロ波マンモグラフィの技術」,RFワールド,日本,CQ出版株式会社,2014年02月01日,No.25,pp.42-53,ISBN 978-4-7898-4876-3 |
| 谷田 尚子, 高井 信治, 太田 裕治, 會川 義寛,「誘電率と生体」,生活工学研究,日本,2001年07月17日,Vol.3, No.2,pp.256-259 |
Also Published As
| Publication number | Publication date |
|---|---|
| IL289641B1 (en) | 2024-09-01 |
| TW202111572A (zh) | 2021-03-16 |
| CA3148045A1 (en) | 2021-02-04 |
| WO2021020387A1 (ja) | 2021-02-04 |
| CN114144108A (zh) | 2022-03-04 |
| KR20220041088A (ko) | 2022-03-31 |
| US20220268711A1 (en) | 2022-08-25 |
| JPWO2021020387A1 (ja) | 2021-02-04 |
| IL289641A (en) | 2022-03-01 |
| SA522431510B1 (ar) | 2024-05-12 |
| EP4009040A1 (en) | 2022-06-08 |
| AU2020323417A1 (en) | 2022-02-10 |
| EP4009040A4 (en) | 2023-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7464293B2 (ja) | 散乱トモグラフィ装置及び散乱トモグラフィ方法 | |
| US10101282B2 (en) | Scattering tomography method and scattering tomography device | |
| US10746765B2 (en) | Data processing method and the measurement device | |
| JP7481757B2 (ja) | 散乱トモグラフィ装置及び散乱トモグラフィ方法 | |
| EP2957925A1 (en) | Scattering tomography method and scattering tomography device | |
| Tajik et al. | Comparative study of the Rytov and Born approximations in quantitative microwave holography | |
| Amineh et al. | Three‐dimensional microwave holographic imaging employing forward‐scattered waves only | |
| Goncharsky et al. | On mathematical problems of two-coefficient inverse problems of ultrasonic tomography | |
| WO2022265017A1 (ja) | 映像化装置及び映像化方法 | |
| Pastorino et al. | Detection of defects in wood slabs by using a microwave imaging technique | |
| Alwan et al. | Investigation of tumor using an antenna scanning system | |
| WO2022260112A1 (ja) | 映像化装置及び映像化方法 | |
| RU2817057C1 (ru) | Устройство томографии на рассеянном излучении и способ томографии на рассеянном излучении | |
| JP7230286B1 (ja) | データ処理方法、計測システム、及び、プログラム | |
| Nguyen et al. | On the numerical solution to an inverse medium problem | |
| Amineh et al. | Research Article Three-Dimensional Holographic Imaging Using Single Frequency Microwave Data | |
| Tavanti | Novel Inverse-Scattering Methods in Banach Spaces | |
| Knauder et al. | Application Note: SmartScan Phase Measurement | |
| Alvandi et al. | A Time-Domain Method for Shape Reconstruction of a Target with Known Electrical Properties (RESEARCH NOTE) | |
| Cheng et al. | Through-the-wall imaging of 3D objects | |
| Antipenskii et al. | The use of wavelet transformations to determine the local effective scattering cross sections of objects of complex geometrical shape over a superbroad frequency band |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230317 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240321 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7464293 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |