JP7435780B2 - Elevator displacement control device - Google Patents
Elevator displacement control device Download PDFInfo
- Publication number
- JP7435780B2 JP7435780B2 JP2022533019A JP2022533019A JP7435780B2 JP 7435780 B2 JP7435780 B2 JP 7435780B2 JP 2022533019 A JP2022533019 A JP 2022533019A JP 2022533019 A JP2022533019 A JP 2022533019A JP 7435780 B2 JP7435780 B2 JP 7435780B2
- Authority
- JP
- Japan
- Prior art keywords
- gap
- guide rail
- car
- stopper
- elevating body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000006073 displacement reaction Methods 0.000 title claims description 127
- 230000003028 elevating effect Effects 0.000 claims description 84
- 238000005259 measurement Methods 0.000 claims description 22
- 238000012886 linear function Methods 0.000 claims description 3
- 230000001629 suppression Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 25
- 230000006870 function Effects 0.000 description 20
- 238000012545 processing Methods 0.000 description 11
- 238000005303 weighing Methods 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/02—Cages, i.e. cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B7/00—Other common features of elevators
- B66B7/02—Guideways; Guides
Description
本開示は、エレベーターの昇降体の変位抑制装置に関する。 The present disclosure relates to a displacement suppressing device for a lifting body of an elevator.
特許文献1は、エレベーターの例を開示する。エレベーターにおいて、かごに地震プレートが設けられる。地震プレートは、ガイドレールと協働してかごの横方向の変位を抑制する。 Patent Document 1 discloses an example of an elevator. In elevators, the car is provided with a seismic plate. The seismic plate cooperates with the guide rail to suppress lateral displacement of the car.
しかしながら、特許文献1のエレベーターにおいて、地震プレートは一方のガイドレールについてかごの上部の一か所に設けられる。このため、かごなどの昇降体が偏荷重などによって傾いた場合に、変位の抑制の効果が変動する可能性がある。 However, in the elevator of Patent Document 1, the seismic plate is provided at one location on the top of the car for one guide rail. For this reason, when an elevating object such as a car is tilted due to an unbalanced load, the effect of suppressing displacement may vary.
本開示は、このような課題の解決に係るものである。本開示は、昇降体が偏荷重によって傾く場合においても、安定して変位を抑制できるエレベーターの昇降体の変位抑制装置を提供する。 The present disclosure relates to solving such problems. The present disclosure provides a displacement suppressing device for an elevator elevating body that can stably suppress displacement even when the elevating body tilts due to an uneven load.
本開示に係る変位抑制装置は、エレベーターのガイドレールに沿って走行する昇降体の上下方向における中央部にある第1位置に設けられ、第1隙間を空けてガイドレールに対向する第1ストッパと、第1位置から上下方向において離れた昇降体の第2位置に設けられ、第1隙間より大きい第2隙間を空けてガイドレールに対向する第2ストッパと、第1位置に関して上下方向において第2位置に対称な昇降体の対称位置に設けられ、第2隙間と同じ大きさの隙間を空けてガイドレールに対向する対称ストッパと、を備える。 The displacement suppressing device according to the present disclosure includes a first stopper that is provided at a first position in the center in the vertical direction of an elevating body that runs along a guide rail of an elevator, and that faces the guide rail with a first gap. , a second stopper provided at a second position of the elevating body vertically away from the first position and facing the guide rail with a second gap larger than the first gap; A symmetrical stopper is provided at a symmetrical position of the vertically symmetrical elevating body and faces the guide rail with a gap the same size as the second gap.
本開示に係る変位抑制装置であれば、昇降体が偏荷重によって傾く場合においても、昇降体の変位を安定に抑制できる。 With the displacement suppressing device according to the present disclosure, even when the elevating object is tilted due to an unbalanced load, the displacement of the elevating object can be stably suppressed.
本開示を実施するための形態について添付の図面を参照しながら説明する。各図において、同一または相当する部分には同一の符号を付して、重複する説明は適宜に簡略化または省略する。 Modes for carrying out the present disclosure will be described with reference to the accompanying drawings. In each figure, the same or corresponding parts are given the same reference numerals, and overlapping explanations are simplified or omitted as appropriate.
実施の形態1.
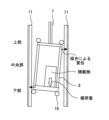
図1は、実施の形態1に係るエレベーター1の構成図である。
Embodiment 1.
FIG. 1 is a configuration diagram of an elevator 1 according to the first embodiment.
エレベーター1は、複数の階床を有する建物2に設けられる。建物2において、昇降路3が設けられる。昇降路3は、複数の階床にわたる空間である。建物2において、昇降路3の上部に機械室4が設けられる。建物2において、昇降路3の底部にピット5が設けられる。
An elevator 1 is provided in a
エレベーター1は、巻上機6と、主ロープ7と、かご8と、釣合い錘9と、を備える。
The elevator 1 includes a
巻上機6は、シーブおよびモータを備える。巻上機6のモータは、巻上機6のシーブを回転駆動する装置である。巻上機6は、例えば機械室4に設けられる。
The
主ロープ7は、巻上機6のシーブに巻き掛けられる。主ロープ7の一端は、かご8に接続される。主ロープ7の他端は、釣合い錘9に接続される。エレベーター1は、複数の主ロープ7を備えていてもよい。
The
かご8は、昇降路3において鉛直方向に走行することで複数の階床の間で利用者などを輸送する装置である。かご8は、利用者などが乗降しうるように開閉するかごドア10を備える。釣合い錘9は、主ロープ7を通じて巻上機6のシーブの両側にかかる荷重のバランスをかご8との間でとる装置である。かご8および釣合い錘9は、主ロープ7によって昇降路3において吊られる。かご8および釣合い錘9は、巻上機6が主ロープ7を巻き上げることによって昇降路3を互いに反対方向に走行する。かご8および釣合い錘9の各々は、昇降体の例である。
The
昇降路3において、一対のかごガイドレール11、一対の釣合い錘ガイドレール12、および複数のブラケット13が設けられる。
In the
一対のかごガイドレール11は、昇降路3におけるかご8の走行を案内する一対のガイドレールである。各々のかごガイドレール11は、昇降路3において鉛直方向に沿って配置される。一方のかごガイドレール11は、かご8の左側に配置される。他方のかごガイドレール11は、かご8の右側に配置される。
The pair of
一対の釣合い錘ガイドレール12は、昇降路3における釣合い錘9の走行を案内する一対のガイドレールである。各々の釣合い錘ガイドレール12は、昇降路3において鉛直方向に沿って配置される。一方の釣合い錘ガイドレール12は、釣合い錘9の左側に配置される。他方の釣合い錘ガイドレール12は、釣合い錘9の右側に配置される。
The pair of
かご8または釣合い錘9などの昇降体は、かごガイドレール11または釣合い錘ガイドレール12などのガイドレールに沿って鉛直方向に走行する。昇降体の走行を案内するガイドレールの各々は、複数のブラケット13によって昇降路3に固定される。
An elevating body such as the
エレベーター1は、地震感知器14と、制御盤15と、を備える。
The elevator 1 includes an
地震感知器14は、地震の発生を感知する部分である。地震感知器14は、例えばピット5に設けられる。このとき、地震感知器14は、例えばP波(Primary wave)によって地震を感知するP波感知器である。あるいは、地震感知器14は、例えば機械室4に設けられる。このとき、地震感知器14は、例えばS波(Secondary wave)によって地震を感知するS波感知器である。地震感知器14は、ピット5および機械室4の両方に設けられていてもよい。
The
制御盤15は、エレベーター1の動作を制御する装置である。制御盤15は、例えば機械室4に設けられる。制御盤15は、例えば巻上機6の動作の制御によってかご8および釣合い錘9の走行を制御する。また、制御盤15は、エレベーター1の運転モードを管理する。エレベーター1の運転モードは、通常運転と、地震時管制運転と、を含む。通常運転は、利用者によって登録された呼びなどに応答させるようにかご8を走行させる運転モードである。地震時管制運転は、エレベーター1において地震感知器14によって地震の発生が感知されたときの運転モードである。地震時管制運転において、制御盤15は、例えば走行しているかご8を最寄りの階床に停止させる。
The
図2は、実施の形態1に係るかご8における偏荷重の例を示す図である。
図2において、正面から見たかご8が示される。
FIG. 2 is a diagram showing an example of an unbalanced load in the
In FIG. 2, the
かご8において、利用者または利用者が持ち込む重量物などがかご8の重心から離れた位置に乗ることで、偏荷重が生じることがある。図2に示す例において、かご8の右側に偏った荷重がかかっている。このとき、偏荷重によってかご8に傾きが生じる。ここで、かご8は主ロープ7によって吊られているので、偏荷重によって中央部を中心として回転するように傾く。ここで、中央部は、例えばかご8の重心を含む高さの部分である。この例において、かご8は偏荷重によって右側に傾く。
In the
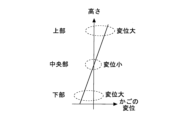
図3は、実施の形態1に係るかご8における偏荷重による変位の例を示す図である。
図3において、縦軸は、かご8における上下方向の位置を示す。図3において、横軸は、偏荷重によるかご8の水平方向の変位を示す。
FIG. 3 is a diagram showing an example of displacement due to an unbalanced load in the
In FIG. 3, the vertical axis indicates the vertical position in the
かご8は中央部を中心として回転するように傾くため、かご8の中央部において偏荷重による水平方向の変位は小さい。一方、かご8の中央部から離れるにつれて偏荷重による水平方向の変位は大きくなる。かご8の上部および下部は、互いに反対方向に変位する。
Since the
例えば地震などによってかご8が大きく変位する場合に、かご8などの昇降体に搭載された機器などが揺れの影響を受ける可能性がある。このとき、揺れの影響によって機器の損傷などが発生する場合に、エレベーター1の運行が影響を受ける可能性がある。このような事態を回避しうるように、エレベーター1の昇降体において変位抑制装置16が設けられる。変位抑制装置16は、昇降体の水平方向の変位を抑制する装置である。偏荷重によって昇降体が傾いているときに、図3に示されるように昇降体の上部および下部は中央部より大きく変位する。このため、中央部などの上下方向の一点において昇降体の変位を抑制しても、昇降体の上部または下部において変位が過剰になる可能性がある。このため、変位抑制装置16は、偏荷重によって昇降体が傾いているときに発生した地震の揺れにも対応しうるように、偏荷重で生じた傾きによる変位の影響を考慮して設けられる。
For example, when the
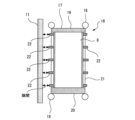
図4は、実施の形態1に係るかご8の正面図である。
FIG. 4 is a front view of the
変位抑制装置16は、かご8に設けられる。かご8は、かご枠17と、複数のガイドシュー18と、を備える。
The
かご枠17は、上梁19と、下梁20と、一対の縦柱21と、を備える。上梁19は、かご8の上部において左端部および右端部の間にわたって配置される部材である。例えば上梁19において、主ロープ7が取り付けられる。下梁20は、かご8の下部において左端部および右端部の間にわたって配置される部材である。一対の縦柱21は、上梁19および下梁20の間にわたって配置される部材である。一方の縦柱21は、かご8の左端部に配置される。他方の縦柱21は、かご8の右端部に配置される。左側の縦柱21は、かご8の左側のかごガイドレール11に沿って配置される。右側の縦柱21は、かご8の右側のかごガイドレール11に沿って配置される。
The
複数のガイドシュー18は、一対のかごガイドレール11によって案内される部分である。各々のガイドシュー18は、いずれかのかごガイドレール11に対向する。各々のガイドシュー18は、例えばかご枠17に取り付けられる。各々のガイドシュー18は、例えば上梁19または下梁20の左端部または右端部などに配置される。
The plurality of
変位抑制装置16は、複数のストッパ22を備える。各々のストッパ22は、かごガイドレール11によってかご8の変位を規制する部分である。各々のストッパ22は、例えば互いに同様の形状である。各々のストッパ22は、いずれかの縦柱21に取り付けられる。各々の縦柱21において、例えば互いに同数のストッパ22が取り付けられる。各々の縦柱21において、複数のストッパ22は上下方向に等間隔に並ぶ。各々の縦柱21において、複数のストッパ22は中央部に関して上下に対称に配置される。各々の縦柱21において、複数のストッパ22として5つのストッパ22が取り付けられる。なお、各々の縦柱21において、複数のストッパ22として偶数個のストッパ22が取り付けられていてもよい。また、いずれかのストッパ22は、上下方向においてガイドシュー18の外側に配置されていてもよい。すなわち、いずれかのストッパ22は、上梁19などのかご8の上側に配置されるガイドシュー18より上方、または下梁20などのかご8の下側に配置されるガイドシュー18より下方に配置されていてもよい。このとき、縦柱21は、上下方向においてガイドシュー18の外側まで延びていてもよい。あるいは、ガイドシュー18の外側において当該ストッパ22を支持する支持体がかご8に設けられていてもよい。
The
かご8の中央部は、第1位置の例である。かご8において第1位置より上方の位置は、第2位置の例である。かご8において第2位置よりさらに上方の位置は、第3位置の例である。この例において、第2位置および第3位置の間隔は、第1位置および第2位置の間隔に等しい。かご8において中央部に関して第2位置の上下に対称な位置は、対称位置の例である。
The center of the
各々のストッパ22は、隙間を空けてかごガイドレール11の表面に対向する。なお、図5などにおいて示される隙間の大きさは、説明のため誇張して示されている。各々のストッパ22およびかごガイドレール11の表面の隙間は、ストッパ22が設けられるかご8の位置に応じて設定される。
Each
この例において、中央部に配置されるストッパ22は、第1位置に配置される第1ストッパの例である。中央部に配置されるストッパ22の上方において隣接するストッパ22は、第2位置に配置される第2ストッパの例である。中央部に配置されるストッパ22の下方において隣接するストッパ22は、対称位置に配置される対称ストッパの例である。かご8において最も上方に配置されるストッパ22は、第3位置に配置される第3ストッパの例である。
In this example, the
第1ストッパは、第1隙間を空けてかごガイドレール11の表面に対向する。第2ストッパは、第2隙間を空けてかごガイドレール11の表面に対向する。第3ストッパは、第3隙間を空けてかごガイドレール11の表面に対向する。第2隙間は、第1隙間より大きい隙間である。第3隙間は、第2隙間より大きい隙間である。
The first stopper faces the surface of the
図5は、実施の形態1に係るかご8の水平断面図である。
図5において、かご8の中央部を通る水平面による断面図が示される。
FIG. 5 is a horizontal sectional view of the
In FIG. 5, a cross-sectional view taken along a horizontal plane passing through the center of the
各々の縦柱21は、かご8の左右の端部において前後方向の中央に設けられる。
Each
各々のストッパ22は、かごガイドレール11の前面、後面、および左右の内側面の三面の各々に対向する。ここで、左右の内側面は、かご8側の側面である。
Each
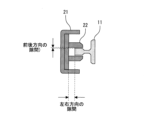
図6は、実施の形態1に係るストッパ22の水平断面図である。
図6において、いずれかのストッパ22を通る水平面による断面図が代表として示される。
FIG. 6 is a horizontal sectional view of the
In FIG. 6, a cross-sectional view taken along a horizontal plane passing through one of the
各々のストッパ22において、かごガイドレール11の前面およびストッパ22の隙間の大きさは、かごガイドレール11の左右の内側面およびストッパ22の隙間の大きさより小さい。また、かごガイドレール11の後面およびストッパ22の隙間の大きさは、かごガイドレール11の左右の内側面およびストッパ22の隙間の大きさより小さい。
In each
各々のストッパ22において、かごガイドレール11の前面およびストッパ22の隙間の大きさは、かごガイドレール11の後面およびストッパ22の隙間の大きさに等しい。また、左右の縦柱21の各々の同じ高さに配置されるストッパ22において、かごガイドレール11の左右の内側面およびストッパ22の隙間の大きさは互いに等しい。
In each
なお、かご8における偏荷重は、利用者または利用者が持ち込む重量物によらずに生じる場合がある。かご8における偏荷重は、例えば主ロープ7などのローピングによって生じうる。あるいは、かご8における偏荷重は、例えば制御ケーブルまたはコンペンセーションロープが取り付けられる位置の偏りなどによって生じうる。この場合に、かごガイドレール11の前面およびストッパ22の隙間の大きさは、かごガイドレール11の後面およびストッパ22の隙間の大きさと異なっていてもよい。また、左右の縦柱21の各々の同じ高さに配置されるストッパ22において、かごガイドレール11の左右の内側面およびストッパ22の隙間の大きさは互いに異なっていてもよい。
Note that an unbalanced load on the
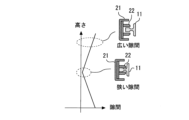
図7は、実施の形態1に係る変位抑制装置16における隙間の例を示す図である。
図7において、縦軸は、かご8における上下方向の位置を示す。図7において、横軸は、かごガイドレール11およびストッパ22の隙間の大きさを示す。図7において、かごガイドレール11の前面およびストッパ22の隙間と当該ストッパ22のかご8における上下方向の位置との関係が示される。
FIG. 7 is a diagram showing an example of a gap in the
In FIG. 7, the vertical axis indicates the vertical position in the
かご8において中央部から離れた位置に配置されるストッパ22の隙間と中央部に配置されるストッパ22の隙間との大きさの差は、中央部からの遠さに比例する。中央部からの遠さは、例えば中央部との高さの差の絶対値などである。すなわち、第1隙間、第2隙間、および第3隙間の大きさは、例えばかご8の中央部からの遠さの1次関数によって関係づけられる。また、かごガイドレール11の前面およびストッパ22の隙間と当該ストッパ22のかご8における上下方向の位置との関係は、図7に示されるように中央部に関して対称な関係である。
The difference in size between the gap between the
なお、この例において、かごガイドレール11の後面およびストッパ22の隙間と当該ストッパ22のかご8における上下方向の位置との関係も、図7に示される関係と同様である。また、かごガイドレール11の左右の内側面およびストッパ22の隙間と当該ストッパ22のかご8における上下方向の位置との関係も、図7に示される関係と同様である。
In this example, the relationship between the gap between the rear surface of the
このような隙間が設定された複数のストッパ22を有することにより、変位抑制装置16は、偏荷重によってかご8が傾いている場合においても、かご8の上部またはかご8の下部の変位を抑制できる。これにより、変位抑制装置16は、偏荷重によってかご8が傾く場合においても、地震などの揺れに対するかご8の変位を安定して抑制できる。
By having a plurality of
図8および図9は、実施の形態1に係るかご8における偏荷重の例を示す図である。
図8および図9において、上方から見たかご8が示される。
FIGS. 8 and 9 are diagrams showing examples of unbalanced loads in the
In Figures 8 and 9, the
図8において、左右方向の偏荷重が生じている。左右方向の偏荷重が生じる場合に、かご8は左右方向に傾く。このとき、変位抑制装置16は、左右のいずれか一本のかごガイドレール11を通じて揺れなどによるかご8の変位を抑制する。
In FIG. 8, an unbalanced load in the left-right direction is occurring. When an unbalanced load occurs in the left-right direction, the
一方、図9において、前後方向の偏荷重が生じている。前後方向の偏荷重が生じる場合に、かご8は前後方向に傾く。このとき、変位抑制装置16は、左右の両方のかごガイドレール11を通じて揺れなどによるかご8の変位を抑制する。このため、前後方向の変位を抑制するためのかごガイドレール11の表面およびストッパ22の隙間は、左右方向の変位を抑制するためのかごガイドレール11の表面およびストッパ22の隙間より小さくできる。
On the other hand, in FIG. 9, an unbalanced load in the front-rear direction is occurring. When an unbalanced load occurs in the front-rear direction, the
なお、変位抑制装置16は、例えば第1ストッパおよび第2ストッパの間などにおいて、かごガイドレール11に対向する側の端部を上下方向において連続的に接続する部材を備えていてもよい。あるいは、変位抑制装置16において、複数のストッパ22の一部または全部は、上下方向において連続して縦柱21に設けられる部材の一部であってもよい。
Note that the
また、変位抑制装置16は、昇降体である釣合い錘9に設けられてもよい。このとき、釣合い錘9に設けられる変位抑制装置16は、かご8に設けられる変位抑制装置16と同様に作用することによって、釣合い錘9の変位を抑制する。釣合い錘9における偏荷重は、例えば主ロープ7などのローピングによって生じうる。あるいは、釣合い錘9における偏荷重は、例えばコンペンセーションロープが取り付けられる位置の偏りなどによって生じうる。
Further, the
以上に説明したように、実施の形態1に係る昇降体の変位抑制装置16は、第1ストッパと、第2ストッパと、対称ストッパと、を備える。昇降体は、エレベーター1のガイドレールに沿って走行する。第1ストッパは、昇降体の上下方向における中央部にある第1位置に設けられる。第1ストッパは、第1隙間を空けてガイドレールに対向する。第2ストッパは、昇降体の第2位置に設けられる。第2位置は、第1位置から上下方向において離れている。第2ストッパは、第2隙間を空けてガイドレールに対向する。第2隙間は、第1隙間より大きい。対称ストッパは、昇降体の対称位置に設けられる。対称位置は、第1位置に関して上下方向において第2位置に対称な位置である。対称ストッパは、第2隙間と同じ大きさの隙間を空けてガイドレールに対向する。
As described above, the elevating body
このような構成によって、変位抑制装置16は、偏荷重によって昇降体が傾いている場合においても、傾きによって昇降体の中央部より大きく変位した上部または下部の、揺れなどによる水平方向の変位を抑制できる。これにより、変位抑制装置16は、偏荷重によって昇降体が傾く場合においても、地震などの揺れに対する昇降体の変位を安定して抑制できる。すなわち、偏荷重による変位が第2位置より小さい第1位置において、第1隙間は第2隙間より小さいので、地震などの揺れに対する昇降体の変位が安定して抑制される。また、偏荷重による変位が第1位置より大きい第2位置において、第2隙間は第1隙間より大きいので、偏荷重によって昇降体が傾く場合であっても、通常運転における第2ストッパのガイドレールへの接触が抑えられる。これにより、ガイドレールおよびストッパ22の接触による異音、振動、または衝撃などの発生が抑えられる。このため、かご8に乗車している利用者の快適性が損なわれにくい。したがって、変位抑制装置16によって、偏荷重によって昇降体が傾く場合であっても、地震などの揺れに対する昇降体の変位の抑制と、通常運転におけるガイドレールおよびストッパ22の接触の抑制とが両立される。
With this configuration, the
また、変位抑制装置16は、対称ストッパを備える。対称ストッパは、昇降体の対称位置に設けられる。対称位置は、昇降体の中央部に関して上下方向において第2位置に対称な位置である。対称ストッパは、第2隙間と同じ大きさの隙間を空けてガイドレールに対向する。
The
このような構成によって、変位抑制装置16は、偏荷重による傾きによって上部または下部のいずれがガイドレールに近づくように変位した場合においても、地震などの揺れに対する昇降体の変位を安定して抑制できる。
With such a configuration, the
また、変位抑制装置16は、第3ストッパを備える。第3ストッパは、第3位置に設けられる。第3位置は、昇降体の中央部から第2位置より上下方向において離れている。第3ストッパは、第3隙間を空けてガイドレールに対向する。第3隙間は、第2隙間より大きい。第1隙間の大きさ、第2隙間の大きさ、および第3隙間の大きさは、中央部からの遠さの1次関数によって関係づけられる。
Further, the
このような構成によって、変位抑制装置16は、直線的なガイドレールの表面に沿って揺れなどによる昇降体の変位を抑制できる。このため、変位抑制装置16は、地震などの揺れに対する昇降体の変位をより安定して抑制できる。
With such a configuration, the
また、第1ストッパは、ガイドレールの前面、後面、および左右の内側面の三面の各々に対向する。第2ストッパは、ガイドレールの前面、後面、および左右の内側面の三面の各々に対向する。ガイドレールの前面との間の第2隙間は、ガイドレールの前面との間の第1隙間より大きい。ガイドレールの後面との間の第2隙間は、ガイドレールの後面との間の第1隙間より大きい。ガイドレールの左右の内側面との間の第2隙間は、ガイドレールの左右の内側面との間の第1隙間より大きい。 Further, the first stopper faces each of the three surfaces, the front surface, the rear surface, and the left and right inner surfaces of the guide rail. The second stopper faces each of the three surfaces, the front surface, the rear surface, and the left and right inner surfaces of the guide rail. The second gap with the front surface of the guide rail is larger than the first gap with the front surface of the guide rail. The second gap with the rear surface of the guide rail is larger than the first gap with the rear surface of the guide rail. The second gap between the left and right inner surfaces of the guide rail is larger than the first gap between the left and right inner surfaces of the guide rail.
このような構成によって、昇降体の変位はガイドレールによって3方向から抑制される。これにより、変位の抑制がより安定に行われる。 With such a configuration, the displacement of the elevating body is suppressed from three directions by the guide rail. Thereby, displacement can be suppressed more stably.
また、ガイドレールの前面との間の第1隙間またはガイドレールの後面との間の第1隙間の少なくとも一方は、ガイドレールの内側面との間の第1隙間より小さい。
また、ガイドレールの前面との間の第2隙間またはガイドレールの後面との間の第2隙間の少なくとも一方は、ガイドレールの内側面との間の第2隙間より小さい。
Moreover, at least one of the first gap with the front surface of the guide rail and the first gap with the rear surface of the guide rail is smaller than the first gap with the inner surface of the guide rail.
Furthermore, at least one of the second gap between the guide rail and the front surface of the guide rail and the second gap between the guide rail and the rear surface of the guide rail is smaller than the second gap between the guide rail and the inner surface of the guide rail.
このような構成において、昇降体の傾きやすさなどに応じて変位を抑制する隙間の大きさが調整される。このため、隙間が大きすぎることによって変位が十分抑制されないことを回避しうる。また、隙間が小さすぎることによってストッパ22およびガイドレールが接触することを回避しうる。これにより、ガイドレールおよびストッパ22の接触による異音、振動、または衝撃などの発生が抑えられる。このため、かご8に乗車している利用者の快適性が損なわれにくい。
In such a configuration, the size of the gap that suppresses displacement is adjusted depending on how easily the elevating body is inclined. Therefore, it is possible to avoid displacement being insufficiently suppressed due to the gap being too large. Furthermore, it is possible to avoid contact between the
なお、かご8などの昇降体において上下方向に並ぶ複数のストッパ22は、不等間隔に配置されていてもよい。例えば、複数のストッパ22は、隣接するストッパとの上下方向の間隔が昇降体の中央部から離れるほど小さくなるように配置されてもよい。このとき、中央部より上方に配置されるストッパ22について、上側に隣接するストッパ22との上下方向における間隔は、下側に隣接するストッパ22との上下方向における間隔より小さい。また、中央部より下方に配置されるストッパ22について、下側に隣接するストッパ22との上下方向における間隔は、上側に隣接するストッパ22との上下方向における間隔より小さい。
In addition, the plurality of
縦柱21の上端部は上梁19に接続され、縦柱21の下端部は下梁20に接続されているので、縦柱21の水平方向における剛性は、中央部から離れるほど高くなる。剛性が高い位置において、縦柱21は、ストッパ22を通じてガイドレールから反力を受けても変形しにくい。縦柱21がガイドレールから逃げるように変形しにくいので、剛性が高い位置に設けられたストッパ22において、昇降体の変位抑制の効果は低下しにくい。このため、中央部から離れるほど密になるように配置された複数のストッパ22によって、縦柱21の剛性が高い位置において昇降体の変位が効率的に抑えられる。
Since the upper end of the
実施の形態2.
実施の形態2において、実施の形態1で開示される例と相違する点について特に詳しく説明する。実施の形態2で説明しない特徴については、実施の形態1で開示される例のいずれの特徴が採用されてもよい。
In
図10は、実施の形態2に係るかご8における偏荷重による傾きの例を示す図である。
図10において、正面から見たかご8が示される。
FIG. 10 is a diagram showing an example of inclination due to an unbalanced load in the
In FIG. 10, the
偏荷重によってかご8が傾くときに、かごガイドレール11はかご8からの反力によってたわみなどの変形を生じることがある。
When the
図11は、実施の形態2に係るかご8における偏荷重による変位の例を示す図である。
図11において、縦軸は、かご8における上下方向の位置を示す。図11において、横軸は、偏荷重によるかご8の水平方向の変位、およびかごガイドレール11の変形による変位を示す。
FIG. 11 is a diagram showing an example of displacement due to an unbalanced load in the
In FIG. 11, the vertical axis indicates the vertical position in the
かごガイドレール11およびストッパ22の隙間は、かご8の傾きによる変位および当該傾きによるかごガイドレール11の変形による変位の差によって変化する。ここで、かごガイドレール11は、鉛直方向において曲線的に変形しうる。
The gap between the
図12は、実施の形態2に係る変位抑制装置16における隙間の例を示す図である。
図12において、縦軸は、かご8における上下方向の位置を示す。図12において、横軸は、かごガイドレール11およびストッパ22の隙間の大きさを示す。図12において、かごガイドレール11の前面およびストッパ22の隙間と当該ストッパ22のかご8における上下方向の位置との関係が示される。
FIG. 12 is a diagram showing an example of a gap in the
In FIG. 12, the vertical axis indicates the vertical position in the
かご8において中央部から離れた位置に配置されるストッパ22の隙間と中央部に配置されるストッパ22の隙間との大きさの差は、中央部からの遠さの単調増加関数に従う。ここで、当該関数は、偏荷重によって生じるかご8の傾きおよび当該傾きによるかごガイドレール11の変形量に基づいて予め設定された非線形な関数である。当該関数は、例えば中央部からの遠さに関する凸関数または凹関数などである。すなわち、変位抑制装置16が第1ストッパ、第2ストッパ、および第3ストッパを有する場合に、第1隙間、第2隙間、および第3隙間の大きさは、当該関数によってかご8の中央部からの遠さと関係づけられる。
The difference in size between the gap between the
なお、この例において、かごガイドレール11の後面およびストッパ22の隙間と当該ストッパ22のかご8における上下方向の位置との関係も、図12に示される関係と同様であってもよい。また、かごガイドレール11の左右の内側面およびストッパ22の隙間と当該ストッパ22のかご8における上下方向の位置との関係も、図12に示される関係と同様であってもよい。
In this example, the relationship between the gap between the rear surface of the
以上に説明したように、実施の形態2に係る変位抑制装置16は、第3ストッパを備える。第3ストッパは、第3位置に設けられる。第3位置は、昇降体の中央部から第2位置より上下方向において離れている。第3ストッパは、第3隙間を空けてガイドレールに対向する。第3隙間は、第2隙間より大きい。第1隙間の大きさ、第2隙間の大きさ、および第3隙間の大きさは、中央部からの遠さの関数によって関係づけられる。当該関数は、昇降体の偏荷重によって生じる傾きおよび当該傾きによるガイドレールの変形量に基づく非線形な関数である。
As explained above, the
このような構成において、変位抑制装置16は、ガイドレールの変形を考慮して揺れなどによる昇降体の変位を抑制できる。このため、変位抑制装置16は、ガイドレールが変形する場合においても、地震などの揺れに対する昇降体の変位を安定して抑制できる。
In such a configuration, the
実施の形態3.
実施の形態3において、実施の形態1または実施の形態2で開示される例と相違する点について特に詳しく説明する。実施の形態3で説明しない特徴については、実施の形態1または実施の形態2で開示される例のいずれの特徴が採用されてもよい。
In
図13は、実施の形態3に係るストッパ22の上面図である。
図13において、上方から見たストッパ22が示される。
FIG. 13 is a top view of the
In FIG. 13, the
変位抑制装置16において第1ストッパ、第2ストッパ、第3ストッパ、および対称ストッパなどを含む複数のストッパ22の各々は、シュー23およびアクチュエータ24の組を1つ以上備える。この例において、ストッパ22は、シュー23およびアクチュエータ24の組を3組備える。3組のうちのいずれか1組において、シュー23は、かごガイドレール11の前面に対向する。3組のうちの他の1組において、シュー23は、かごガイドレール11の後面に対向する。3組のうちの残りの1組において、シュー23は、かごガイドレール11の左右の内側面に対向する。各々の組において、アクチュエータ24は、シュー23を移動させることでかごガイドレール11およびシュー23の隙間を変化させる。なお、複数のストッパ22の一部または全部において、シュー23およびアクチュエータ24の組のいずれか1つまたは2つが省略されてもよい。
In the
第1ストッパにおける各々の組のシュー23は、第1シューの例である。かごガイドレール11および第1シューは、第1隙間を空けて対向する。第1ストッパにおける各々の組のアクチュエータ24は、第1アクチュエータの例である。第2ストッパにおける各々の組のシュー23は、第2シューの例である。かごガイドレール11および第2シューは、第2隙間を空けて対向する。第2ストッパにおける各々の組のアクチュエータ24は、第2アクチュエータの例である。
Each set of
図14は、実施の形態3に係る変位抑制装置16の構成図である。
図14において、正面から見たかご8が示される。
FIG. 14 is a configuration diagram of the
In FIG. 14, the
かご8において、秤装置25が設けられる。秤装置25は、かご8の下部に設けられる。秤装置25は、かご8における偏荷重を計測する偏荷重計測部の例である。秤装置25は、計測した偏荷重を外部の機器に出力する機能を搭載する。
In the
変位抑制装置16は、制御部26を備える。制御部26は、各々のストッパ22におけるアクチュエータ24の動作を制御する部分である。制御部26は、例えばかご8の上部に設けられる。あるいは、制御部26は、例えばエレベーター1の制御盤15に搭載されていてもよい。あるいは、変位抑制装置16は、各々のストッパ22に1対1に対応する個別の制御部26を備えていてもよい。あるいは、変位抑制装置16は、各々のアクチュエータ24に1対1に対応する個別の制御部26を備えてもよい。制御部26は、かご8の偏荷重の計測結果を取得しうるように、秤装置25などの偏荷重計測部に接続される。
The
続いて、変位抑制装置16の動作の例を説明する。
Next, an example of the operation of the
通常運転において、秤装置25は、かご8における偏荷重を計測する。秤装置25は、計測された偏荷重を制御部26に出力する。
During normal operation, the weighing
制御部26は、秤装置25から入力された偏荷重に基づいて、かご8の傾きを算出する。制御部26は、算出されたかご8の傾きに応じて、各々のストッパ22におけるかごガイドレール11との隙間の変化を算出する。制御部26は、算出した隙間の変化に基づいて、各々のストッパ22においてかごガイドレール11との隙間が予め設定された範囲に収まるように各々のアクチュエータ24を動作させる。当該範囲は、地震などの揺れにおけるかご8の変位をかごガイドレール11によって抑制しうるように予め設定された範囲である。
The
一方、地震時管制運転において、各々のアクチュエータ24は、秤装置25による偏荷重の計測結果に関わらずにかごガイドレール11および各々のシュー23の隙間を狭い状態で維持する。これにより、地震の揺れなどによるかご8の変位は、かごガイドレール11を通じて抑制される。
On the other hand, in the earthquake control operation, each actuator 24 maintains the gap between the
なお、かご8において、図示されない傾斜計測部が設けられていてもよい。傾斜計測部は、かご8の傾きを計測する部分である。傾斜計測部は、例えばかご8の上部または下部などに配置される。傾斜計測部は、例えば傾斜センサ、加速度センサ、またはジャイロセンサなどを備える。傾斜計測部は、かご8の傾きの計測結果を出力する機能を搭載する。
Note that the
通常運転において、制御部26は、傾斜計測部から入力されたかご8の傾きに応じて、各々のストッパ22におけるかごガイドレール11との隙間の変化を算出する。制御部26は、算出した隙間の変化に基づいて、各々のストッパ22の各々のシュー23においてかごガイドレール11との隙間が予め設定された範囲に収まるように各々のアクチュエータ24を動作させる。
During normal operation, the
一方、地震時管制運転において、各々のアクチュエータ24は、傾斜計測部による傾きの計測結果に関わらずにかごガイドレール11および各々のシュー23の隙間を狭い状態で維持する。これにより、地震の揺れなどによるかご8の変位は、かごガイドレール11を通じて抑制される。
On the other hand, in the earthquake control operation, each actuator 24 maintains the gap between the
また、かご8において、図示されないロードセルなどの荷重計が設けられていてもよい。荷重計は、例えば少なくともいずれかのガイドシュー18などに設けられる。荷重計は、ガイドシュー18が受けるかごガイドレール11からの水平反力を計測する機器である。ガイドシュー18が受ける水平反力はかご8の傾きに依るので、荷重計によってかご枠17全体の傾きが計測される。すなわち、荷重計は、傾斜計測部の他の例として機能する。荷重系によってかご枠17全体の傾きが計測されるので、例えば制御ケーブルまたはコンペンセーションロープが取り付けられる位置の偏りなどによって生じる傾きも高い精度で計測される。
Furthermore, the
図15は、実施の形態3の第1の変形例に係る変位抑制装置16の構成図である。
図15において、正面から見たかご8が示される。
FIG. 15 is a configuration diagram of a
In FIG. 15, the
かご8において、カメラ27が設けられる。カメラ27は、かご8の内部に設けられる。カメラ27は撮影したかご8の内部の画像の画像認識などによってかご8における偏荷重を算出する。この例において、カメラ27は、かご8における偏荷重を計測する偏荷重計測部の例である。制御部26は、偏荷重計測部の例であるカメラ27から入力される偏荷重の情報に基づいて、かご8の傾きを算出する。制御部26は、算出したかご8の傾きに応じて各々のアクチュエータ24を動作させる。
A
図16は、実施の形態3の第2の変形例に係る変位抑制装置16の構成図である。
図16において、上方から見たストッパ22が示される。
FIG. 16 is a configuration diagram of a
In FIG. 16, the
変位抑制装置16は、隙間計測部28を備える。隙間計測部28は、かごガイドレール11およびストッパ22の隙間を計測する部分である。隙間計測部28は、第1ストッパ、第2ストッパ、第3ストッパ、および対称ストッパなどを含む複数のストッパ22の少なくともいずれかのストッパ22について隙間の計測を行う。この例において、隙間計測部28は、第1ストッパおよび第2ストッパについて隙間の計測を行う。
The
隙間計測部28は、複数の距離センサ29を有する。この例において、2つの距離センサ29が第1ストッパに対応する。一方の距離センサ29は、かごガイドレール11の前面に対向するシュー23と前面との隙間を計測する。他方の距離センサ29は、かごガイドレール11の左右の内側面に対向するシュー23と内側面との隙間を計測する。隙間計測部28の複数の距離センサ29は、第2ストッパに対応して同様に隙間を計測する2つの距離センサ29を含む。隙間計測部28は、複数の距離センサ29によって計測した隙間の各々の大きさを制御部26に出力する。
The
制御部26は、隙間計測部28から入力された隙間の大きさに応じて、各々のストッパ22の各々のシュー23においてかごガイドレール11との隙間が予め設定された範囲に収まるように各々のアクチュエータ24を動作させる。制御部26は、少なくともいずれかのストッパ22において、例えばかごガイドレール11の前面に対向するシュー23と前面との隙間の大きさの計測値に基づいて、かごガイドレール11の後面に対向するシュー23と後面との隙間の大きさを推定してもよい。このとき、制御部26は、推定した隙間の大きさに応じて、各々のストッパ22の各々のシュー23においてかごガイドレール11との隙間が予め設定された範囲に収まるように各々のアクチュエータ24を動作させる。また、制御部26は、いずれかのストッパ22に設けられる距離センサ29において計測された隙間の大きさに基づいて、かご8の傾きを推定してもよい。このとき、制御部26は、推定した傾きに基づいて各々のアクチュエータ24を動作させる。ここで、制御部26は、隙間計測部28が隙間の大きさを計測していないストッパ22についても、推定した傾きに基づいて各々のアクチュエータ24を動作させてもよい。
The
一方、地震時管制運転において、各々のアクチュエータ24は、隙間計測部28による隙間の計測結果に関わらずにかごガイドレール11および各々のシュー23の隙間を狭い状態で維持する。これにより、地震の揺れなどによるかご8の変位は、かごガイドレール11を通じて抑制される。
On the other hand, in the earthquake control operation, each actuator 24 maintains the gap between the
なお、かご8に取り付けられる制御ケーブルまたはコンペンセーションロープなどは、かご8の位置によって変動する。このため、例えば制御ケーブルなどが取り付けられる位置の偏りなどによってかご8において偏荷重が生じる場合に、かご8の偏荷重もかご8の位置によって同様に変動する。このとき、制御部26は、かご8の位置に基づいてかご8の偏荷重、傾き、またはかごガイドレール11およびストッパ22の隙間などを推定してもよい。制御部26は、かご8の位置に推定の結果に応じて各々のアクチュエータ24を動作させる。
Note that the control cable or compensation rope attached to the
また、変位抑制装置16が昇降体である釣合い錘9に設けられる場合に、釣合い錘9において、変位抑制装置16への電力供給および信号通信などを行う配線が接続されてもよい。あるいは、釣合い錘9は、変位抑制装置16に電力を供給するバッテリーなどを搭載していてもよい。また、変位抑制装置16は、例えば無線によって電力供給および信号通信を受けてもよい。
Further, when the
以上に説明したように、実施の形態3に係る変位抑制装置16において、第1ストッパは、第1シューと、第1アクチュエータと、を備える。第1シューは、第1隙間を空けてガイドレールに対向する。第1アクチュエータは、第1シューを移動させることで第1隙間の大きさを変化させる。第2ストッパは、第2シューと、第2アクチュエータと、を備える。第2シューは、第2隙間を空けてガイドレールに対向する。第2アクチュエータは、第2シューを移動させることで第2隙間の大きさを変化させる。
As described above, in the
このような構成において、昇降体の位置、偏荷重、または傾きなどの状態に応じて隙間の大きさが可変となるので、昇降体の走行などが妨げられないように通常運転において隙間の大きさが調整される。これにより、利用者の乗降などによって偏荷重などの昇降体の状態が変動する場合などにおいても、変動した昇降体の状態に応じて地震の揺れなどによる昇降体の変位が抑制される。 In such a configuration, the size of the gap is variable depending on the position of the elevating object, unbalanced load, inclination, etc., so the size of the gap can be adjusted during normal operation so that the movement of the elevating object is not hindered. is adjusted. As a result, even when the state of the elevating object changes due to unbalanced loads due to users getting on and off, etc., the displacement of the elevating object due to earthquake shaking is suppressed in accordance with the changed state of the elevating object.
また、偏荷重計測部は、昇降体の偏荷重を計測する。第1アクチュエータは、偏荷重計測部が計測した偏荷重によって生じる昇降体の傾きに応じて第1隙間の大きさを変化させる。第2アクチュエータは、偏荷重計測部が計測した偏荷重によって生じる昇降体の傾きに応じて第2隙間の大きさを変化させる。
また、傾斜計測部は、昇降体の傾きを計測する。第1アクチュエータは、傾斜計測部が計測した昇降体の傾きに応じて第1隙間の大きさを変化させる。第2アクチュエータは、傾斜計測部が計測した昇降体の傾きに応じて第2隙間の大きさを変化させる。
また、変位抑制装置16は、隙間計測部28を備える。隙間計測部28は、第1隙間または第2隙間の少なくとも一方の大きさを計測する。第1アクチュエータは、隙間計測部28が計測した隙間の大きさに応じて第1隙間の大きさを変化させる。第2アクチュエータは、隙間計測部28が計測した隙間の大きさに応じて第2隙間の大きさを変化させる。
Moreover, the unbalanced load measurement unit measures the unbalanced load of the elevating body. The first actuator changes the size of the first gap in accordance with the inclination of the elevating body caused by the unbalanced load measured by the unbalanced load measuring section. The second actuator changes the size of the second gap in accordance with the inclination of the elevating body caused by the unbalanced load measured by the unbalanced load measuring section.
Further, the inclination measurement unit measures the inclination of the elevating body. The first actuator changes the size of the first gap according to the inclination of the elevating body measured by the inclination measuring section. The second actuator changes the size of the second gap according to the inclination of the elevating body measured by the inclination measuring section.
Further, the
このような構成において、実際に計測された昇降体の状態に応じて隙間の大きさが可変となるので、通常運転においてより高い精度で隙間の大きさが調整される。特に、ガイドレールおよびストッパ22の隙間が計測される場合などに、ガイドレールの変形などの状態を反映した隙間の大きさの調整ができるようになる。
In such a configuration, the size of the gap is variable according to the actually measured state of the elevating body, so the size of the gap can be adjusted with higher precision during normal operation. In particular, when the gap between the guide rail and the
続いて、図17を用いて、変位抑制装置16のハードウェア構成の例について説明する。
図17は、実施の形態3に係る変位抑制装置16の主要部のハードウェア構成図である。
Next, an example of the hardware configuration of the
FIG. 17 is a hardware configuration diagram of the main parts of the
変位抑制装置16の各機能は、処理回路により実現し得る。処理回路は、少なくとも1つのプロセッサ100aと少なくとも1つのメモリ100bとを備える。処理回路は、プロセッサ100aおよびメモリ100bと共に、あるいはそれらの代用として、少なくとも1つの専用ハードウェア200を備えてもよい。
Each function of the
処理回路がプロセッサ100aとメモリ100bとを備える場合、変位抑制装置16の各機能は、ソフトウェア、ファームウェア、またはソフトウェアとファームウェアとの組み合わせで実現される。ソフトウェアおよびファームウェアの少なくとも一方は、プログラムとして記述される。そのプログラムはメモリ100bに格納される。プロセッサ100aは、メモリ100bに記憶されたプログラムを読み出して実行することにより、変位抑制装置16の各機能を実現する。
When the processing circuit includes a
プロセッサ100aは、CPU(Central Processing Unit)、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、DSPともいう。メモリ100bは、例えば、RAM、ROM、フラッシュメモリ、EPROM、EEPROMなどの、不揮発性または揮発性の半導体メモリなどにより構成される。
The
処理回路が専用ハードウェア200を備える場合、処理回路は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGA、またはこれらの組み合わせで実現される。
When the processing circuitry comprises
変位抑制装置16の各機能は、それぞれ処理回路で実現することができる。あるいは、変位抑制装置16の各機能は、まとめて処理回路で実現することもできる。変位抑制装置16の各機能について、一部を専用ハードウェア200で実現し、他部をソフトウェアまたはファームウェアで実現してもよい。このように、処理回路は、専用ハードウェア200、ソフトウェア、ファームウェア、またはこれらの組み合わせで変位抑制装置16の各機能を実現する。
Each function of the
本開示に係る変位抑制装置は、エレベーターの昇降体に適用できる。 The displacement suppressing device according to the present disclosure can be applied to an elevating body of an elevator.
1 エレベーター、 2 建物、 3 昇降路、 4 機械室、 5 ピット、 6 巻上機、 7 主ロープ、 8 かご、 9 釣合い錘、 10 かごドア、 11 かごガイドレール、 12 釣合い錘ガイドレール、 13 ブラケット、 14 地震感知器、 15 制御盤、 16 変位抑制装置、 17 かご枠、 18 ガイドシュー、 19 上梁、 20 下梁、 21 縦柱、 22 ストッパ、 23 シュー、 24 アクチュエータ、 25 秤装置、 26 制御部、 27 カメラ、 28 隙間計測部、 29 距離センサ、 100a プロセッサ、 100b メモリ、 200 専用ハードウェア 1 elevator, 2 building, 3 hoistway, 4 machine room, 5 pit, 6 hoisting machine, 7 main rope, 8 car, 9 counterweight, 10 car door, 11 car guide rail, 12 counterweight guide rail, 13 bracket , 14 earthquake sensor, 15 control panel, 16 displacement suppressor, 17 car frame, 18 guide shoe, 19 upper beam, 20 lower beam, 21 vertical column, 22 stopper, 23 shoe, 24 actuator, 25 weighing device, 26 control section, 27 camera, 28 gap measurement section, 29 distance sensor, 100a processor, 100b memory, 200 dedicated hardware
Claims (11)
前記第1位置から上下方向において離れた前記昇降体の第2位置に設けられ、前記第1隙間より大きい第2隙間を空けて前記ガイドレールに対向する第2ストッパと、
前記第1位置に関して上下方向において前記第2位置に対称な前記昇降体の対称位置に設けられ、前記第2隙間と同じ大きさの隙間を空けて前記ガイドレールに対向する対称ストッパと、
を備えるエレベーターの昇降体の変位抑制装置。 a first stopper provided at a first position in the center in the vertical direction of an elevating body running along a guide rail of the elevator, and facing the guide rail with a first gap;
a second stopper provided at a second position of the elevating body vertically away from the first position and facing the guide rail with a second gap larger than the first gap;
a symmetrical stopper provided at a symmetrical position of the elevating body that is symmetrical to the second position in the vertical direction with respect to the first position, and facing the guide rail with a gap the same size as the second gap;
A displacement suppressing device for an elevator lifting body.
前記第1隙間の大きさ、前記第2隙間の大きさ、および前記第3隙間の大きさは、前記中央部からの遠さの1次関数によって関係づけられる
請求項1に記載のエレベーターの昇降体の変位抑制装置。 a third stopper provided at a third position of the elevating body vertically away from the first position and from the second position, and facing the guide rail with a third gap larger than the second gap;
The elevator lift according to claim 1, wherein the size of the first gap, the size of the second gap, and the size of the third gap are related by a linear function of distance from the center. Body displacement suppression device.
を備え、
前記第1隙間の大きさ、前記第2隙間の大きさ、および前記第3隙間の大きさは、前記昇降体の偏荷重によって生じる傾きおよび当該傾きによる前記ガイドレールの変形量に基づく前記中央部からの遠さの非線形な関数によって関係づけられる
請求項1に記載のエレベーターの昇降体の変位抑制装置。 a third stopper provided at a third position of the elevating body vertically away from the first position and from the second position, and facing the guide rail with a third gap larger than the second gap;
The size of the first gap, the size of the second gap, and the size of the third gap are determined based on the inclination caused by the unbalanced load of the elevating body and the amount of deformation of the guide rail due to the inclination. The displacement suppressing device for an elevator elevating body according to claim 1, wherein the displacement suppressing device is related by a nonlinear function of distance from the elevator.
を備え、
前記複数のストッパは、前記昇降体において上下方向に並んで設けられ、隣接するストッパとの上下方向の間隔が前記第1位置から離れるほど小さくなるように配置される
請求項1から請求項3のいずれか一項に記載のエレベーターの昇降体の変位抑制装置。 A plurality of stoppers including the first stopper and the second stopper,
The plurality of stoppers are provided in line in the vertical direction on the elevating body, and are arranged such that the distance between the stoppers in the vertical direction becomes smaller as the distance from the first position increases. The displacement suppressing device for an elevator elevating body according to any one of the items.
前記第1隙間を空けて前記ガイドレールに対向する第1シューと、
前記第1シューを移動させることで前記第1隙間の大きさを変化させる第1アクチュエータと、
を備え、
前記第2ストッパは、
前記第2隙間を空けて前記ガイドレールに対向する第2シューと、
前記第2シューを移動させることで前記第2隙間の大きさを変化させる第2アクチュエータと、
を備える
請求項1から請求項4のいずれか一項に記載のエレベーターの昇降体の変位抑制装置。 The first stopper is
a first shoe that faces the guide rail with the first gap therebetween;
a first actuator that changes the size of the first gap by moving the first shoe;
Equipped with
The second stopper is
a second shoe that faces the guide rail with the second gap therebetween;
a second actuator that changes the size of the second gap by moving the second shoe;
The displacement suppressing device for an elevator elevating body according to any one of claims 1 to 4 .
前記第2アクチュエータは、前記偏荷重計測部が計測した偏荷重によって生じる前記昇降体の傾きに応じて前記第2隙間の大きさを変化させる
請求項5に記載のエレベーターの昇降体の変位抑制装置。 The first actuator changes the size of the first gap according to the inclination of the elevating body caused by the unbalanced load measured by an unbalanced load measuring unit that measures the unbalanced load of the elevating body,
The second actuator changes the size of the second gap according to the inclination of the elevating body caused by the unbalanced load measured by the unbalanced load measuring section.
The displacement suppressing device for an elevator elevating body according to claim 5 .
前記第2アクチュエータは、前記傾斜計測部が計測した前記昇降体の傾きに応じて前記第2隙間の大きさを変化させる
請求項5に記載のエレベーターの昇降体の変位抑制装置。 The first actuator changes the size of the first gap according to the inclination of the elevating body measured by a tilt measuring unit that measures the inclination of the elevating body,
The second actuator changes the size of the second gap according to the inclination of the elevating body measured by the inclination measurement unit.
The displacement suppressing device for an elevator elevating body according to claim 5 .
を備え、
前記第1アクチュエータは、前記隙間計測部が計測した隙間の大きさに応じて前記第1隙間の大きさを変化させ、
前記第2アクチュエータは、前記隙間計測部が計測した隙間の大きさに応じて前記第2隙間の大きさを変化させる
請求項5に記載のエレベーターの昇降体の変位抑制装置。 A gap measuring unit that measures the size of at least one of the first gap and the second gap,
The first actuator changes the size of the first gap according to the size of the gap measured by the gap measurement unit,
The second actuator changes the size of the second gap according to the size of the gap measured by the gap measurement section.
The displacement suppressing device for an elevator elevating body according to claim 5 .
前記第2ストッパは、前記ガイドレールの前面、後面、および左右の内側面の三面の各々に対向し、
前記ガイドレールの前面との間の前記第2隙間は、前記ガイドレールの前面との間の前記第1隙間より大きく、
前記ガイドレールの後面との間の前記第2隙間は、前記ガイドレールの後面との間の前記第1隙間より大きく、
前記ガイドレールの左右の内側面との間の前記第2隙間は、前記ガイドレールの左右の内側面との間の前記第1隙間より大きい
請求項1から請求項8のいずれか一項に記載のエレベーターの昇降体の変位抑制装置。 The first stopper faces each of three surfaces of the guide rail, the front surface, the rear surface, and the left and right inner surfaces,
The second stopper faces each of the front, rear, and left and right inner surfaces of the guide rail,
The second gap with the front surface of the guide rail is larger than the first gap with the front surface of the guide rail,
The second gap with the rear surface of the guide rail is larger than the first gap with the rear surface of the guide rail,
The second gap between the left and right inner surfaces of the guide rail is larger than the first gap between the left and right inner surfaces of the guide rail. Elevator displacement control device.
請求項9に記載のエレベーターの昇降体の変位抑制装置。 At least one of the first gap with the front surface of the guide rail or the first gap with the rear surface of the guide rail is smaller than the first gap with the left and right inner surfaces of the guide rail.
The displacement suppressing device for an elevator elevating body according to claim 9 .
請求項9または請求項10に記載のエレベーターの昇降体の変位抑制装置。 At least one of the second gap with the front surface of the guide rail or the second gap with the rear surface of the guide rail is smaller than the second gap with the left and right inner surfaces of the guide rail.
The displacement suppressing device for a lifting body of an elevator according to claim 9 or 10 .
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/026298 WO2022003984A1 (en) | 2020-07-03 | 2020-07-03 | Displacement suppression device for elevating body of elevator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022003984A1 JPWO2022003984A1 (en) | 2022-01-06 |
| JP7435780B2 true JP7435780B2 (en) | 2024-02-21 |
Family
ID=79315011
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022533019A Active JP7435780B2 (en) | 2020-07-03 | 2020-07-03 | Elevator displacement control device |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7435780B2 (en) |
| CN (1) | CN115803277A (en) |
| WO (1) | WO2022003984A1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001139255A (en) | 1999-11-16 | 2001-05-22 | Otis Elevator Co | Elevator guide device |
| JP2006131385A (en) | 2004-11-09 | 2006-05-25 | Hitachi Ltd | Elevator |
| JP2011037547A (en) | 2009-08-07 | 2011-02-24 | Mitsubishi Electric Corp | Method of installing and adjusting guide shoe of elevator |
| JP2015137170A (en) | 2014-01-23 | 2015-07-30 | 株式会社日立ビルシステム | Elevator device |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5440816B2 (en) * | 1974-05-22 | 1979-12-05 | ||
| JPS5110769U (en) * | 1974-07-12 | 1976-01-26 | ||
| JPS53131641A (en) * | 1977-04-19 | 1978-11-16 | Fujitec Co Ltd | Roller guide apparatus for elevator cage |
-
2020
- 2020-07-03 WO PCT/JP2020/026298 patent/WO2022003984A1/en active Application Filing
- 2020-07-03 CN CN202080102253.3A patent/CN115803277A/en active Pending
- 2020-07-03 JP JP2022533019A patent/JP7435780B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001139255A (en) | 1999-11-16 | 2001-05-22 | Otis Elevator Co | Elevator guide device |
| JP2006131385A (en) | 2004-11-09 | 2006-05-25 | Hitachi Ltd | Elevator |
| JP2011037547A (en) | 2009-08-07 | 2011-02-24 | Mitsubishi Electric Corp | Method of installing and adjusting guide shoe of elevator |
| JP2015137170A (en) | 2014-01-23 | 2015-07-30 | 株式会社日立ビルシステム | Elevator device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022003984A1 (en) | 2022-01-06 |
| JPWO2022003984A1 (en) | 2022-01-06 |
| CN115803277A (en) | 2023-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4252330B2 (en) | Elevator rope damping device | |
| JP5354575B2 (en) | Elevator and elevator control method | |
| EP1591399B1 (en) | Elevator equipment | |
| JP7435780B2 (en) | Elevator displacement control device | |
| JP6399404B2 (en) | Car roll restraining device and elevator roll restraining method for elevator | |
| WO2022003979A1 (en) | Elevator ascending/descending body displacement suppression device | |
| JP6569970B2 (en) | Car roll suppression device for elevator | |
| JP4850708B2 (en) | Elevator control system | |
| JP7064620B2 (en) | Elevator equipment for construction | |
| JP7080326B2 (en) | Elevator equipment | |
| CN108689274B (en) | Weighing device of elevator | |
| JP6727437B2 (en) | Elevator equipment | |
| JPH05155560A (en) | Device for automatically correcting center of gravity of cage frame | |
| JP6988876B2 (en) | Main rope runout suppression device | |
| JPH04361966A (en) | Elevator | |
| JP2007168987A (en) | Elevator device | |
| JP7052892B1 (en) | Elevator car device and elevator | |
| WO2023021651A1 (en) | Elevator car and elevator | |
| WO2003078290A1 (en) | Elevator winch and elevator device | |
| WO2023119547A1 (en) | Elevator | |
| WO2023275939A1 (en) | Elevator and diagnostic method for elevator | |
| KR20070024560A (en) | Control system for elevator | |
| JP2023157587A (en) | Elevator device | |
| KR20240034972A (en) | Elevator landing control system | |
| JPH05294585A (en) | Elevator with movable rope hitching part |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220815 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230704 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231013 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240122 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7435780 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |