JP7414643B2 - 形状測定装置および形状測定方法 - Google Patents
形状測定装置および形状測定方法 Download PDFInfo
- Publication number
- JP7414643B2 JP7414643B2 JP2020093416A JP2020093416A JP7414643B2 JP 7414643 B2 JP7414643 B2 JP 7414643B2 JP 2020093416 A JP2020093416 A JP 2020093416A JP 2020093416 A JP2020093416 A JP 2020093416A JP 7414643 B2 JP7414643 B2 JP 7414643B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- probe
- shape
- measurement probe
- measuring device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2504—Calibration devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/08—Measuring arrangements characterised by the use of optical techniques for measuring diameters
- G01B11/12—Measuring arrangements characterised by the use of optical techniques for measuring diameters internal diameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
- G01B11/005—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates coordinate measuring machines
- G01B11/007—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates coordinate measuring machines feeler heads therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
以下、図面に基づいて本発明の実施形態の例について説明する。図1は、第1実施形態の形状測定装置のシステム構成について、接続される周辺装置の構成と共に示すブロック図である。図2は、第1実施形態における形状測定装置の一例の外観を模式的に示す説明図である。図3は、第1実施形態において用いられる計測プローブの一例を示す模式図である。
図8は、第2実施形態の形状測定装置のシステム構成について、接続される周辺装置の構成と共に示すブロック図である。図9は、第2実施形態において用いられる計測プローブに関する別の例を示す模式図である。
図10は、第3実施形態の形状測定装置のシステム構成について、接続される周辺装置の構成と共に示すブロック図である。第3実施形態では、形状測定装置200を複数有し、かつ、測距光源として、複数の形状測定装置200について共通となる測距光源202を有している。各形状測定装置200の内部構成は、測距光源を除き、前述した第2実施形態と同様である。また、図10では、代表的に一つのみ示しているが、3D位置測定機390を各形状測定装置の移動機構制御装置215に接続してある。
次に、第4実施形態について述べる。図3に示す計測プローブ160においては、ヘッド160bから第2の方向300bに放射される測定光はビーム状、すなわち直線状である。このビーム状の測定光を、光路切り替え素子163を回転させることによって、旋回走査光として、測定対象を照射させている。第4実施形態では、これまでの実施形態とは異なる形態の計測プローブを示す例である。ここでは、計測プローブの構成例を中心に説明する。
図12に示す第5実施形態について述べる。本実施形態は、計測プローブに校正機構を装着した例である。本実施形態は、これまでに示した第1から第4実施形態に適用することができるので、ここでは、計測プローブと一軸移動機構とについてのみ述べる。
167,190:歪ゲージ、
185:レーザーダイオード、186:円錐状ミラー、188:カメラレンズ、
200:形状測定装置、210:計測制御装置、211:プローブ制御機構、201,202:測距光源、
215:移動機構制御装置、220:表示部、221:形状データ処理装置、225:全体制御装置、
300a:第1の方向、300b:第2の方向、T:被測定部分、
400:ワーク、421,422,423,424:穴部、
500:移動機構、
600:試料台、610:位置合わせマーク、620:位置決め材、
380:立体形状非接触計測装置、381:3Dセンサ制御機構、
390:3D位置測定機、391:マーカ、
700:製造装置、
701:データ処理装置、702:記憶装置
Claims (13)
- 対象物の被測定部分に測定光を照射して被測定部分との距離測定を行う計測プローブと、
計測プローブを移動する移動機構と、
計測プローブを装着する校正機構としての一軸移動機構と、
計測プローブ及び移動機構の動作を制御して、対象物の複数の被測定部分について距離測定を行って、形状測定を行う計測制御装置と、を備え、
計測制御装置は、
移動機構に指示して、目的位置に計測プローブを移動させて、計測プローブにより被測定部分との距離を測定して、計測プローブが実際に移動した位置を求め、実際に移動した位置と目的位置との誤差を算出し、
算出した誤差に基づいて、移動機構により計測プローブの位置を修正し、
修正した位置において、計測プローブに距離測定を行わせる
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
移動機構は、多関節ロボットであり、アーム先端に計測プローブを保持し、対象物の複数の被測定部分について計測プローブを移動させて、対象物の立体形状を計測する
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
計測制御装置は、移動機構により、計測プローブの先端側を対象物に設けられている穴部に挿入して、穴内周を被測定部分として距離測定を行う
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
計測プローブは、測定光の放射方向を旋回させて射出する
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
計測プローブは、測定光をシート状に射出して対象物の被測定部分を照射し、照射された被測定部分からの反射光を受光して撮像し、
得られた画像を解析して、形状測定を行う
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
計測制御装置は、予め被測定部分の位置が分かっている基準サンプルの各被測定部分を計測プローブで測定した結果を解析することによって得た補正量を記憶し、測定時の移動の際の計測プローブの位置誤差を、補正量により補正する
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
計測プローブの位置・姿勢を外部から測定できるセンサを有し、
計測制御装置は、センサの出力により、計測プローブの移動位置を補正する
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
移動機構に立体形状非接触計測装置を搭載し、
計測制御装置は、立体形状非接触計測装置により各被測定部分の位置を測定して、計測プローブの移動位置を補正する
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置であって、
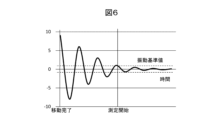
計測制御装置は、移動機構の残留振動が所定の量に減衰するのを待ってから計測プローブによる測定を実施する
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置を複数有し、各形状測定装置の計測プローブに測定光を送る測距光源を、各形状測定装置について共通に設ける
ことを特徴とする形状測定装置。 - 請求項1に記載の形状測定装置を、ネットワークを介して製造装置と接続し、測定結果を送って、製造装置の管理に利用する
ことを特徴とする製造システム。 - 対象物の被測定部分に測定光を照射して被測定部分との距離測定を行う計測プローブと、
計測プローブを移動する移動機構と、
計測プローブを装着する校正機構としての一軸移動機構と、
計測プローブ及び移動機構の動作を制御して、対象物の複数の被測定部分について距離測定を行って、形状測定を行う計測制御装置と、を備える形状測定装置による形状測定方法であって、
計測制御装置は、
目的位置に計測プローブを移動させて、対象物の被測定部分に測定光を照射して被測定部分との距離測定を行い、
この距離測定結果から、計測プローブが実際に移動した位置を求め、実際に移動した位置と目的位置との誤差を算出し、
算出した誤差に基づいて、計測プローブを移動させてその位置を修正し、
修正した位置において、計測プローブに距離測定を行わせ、
上記の手順を、対象物の測定点について行って、得られた測定結果に基づいて立体形状を算出し、
一軸移動機構の内径が既知の箇所を計測プローブにより測定させることによって計測プローブの計測オフセットを校正する
ことを特徴とする形状測定方法。 - 請求項12に記載の形状測定方法であって、
計測制御装置は、
一軸移動機構の異なる複数の箇所であって、それぞれの内径が異なり、且つ既知である前記異なる複数の箇所を計測プローブにより測定させることによって計測プローブの距離に対する感度を校正する
ことを特徴とする形状測定方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020093416A JP7414643B2 (ja) | 2020-05-28 | 2020-05-28 | 形状測定装置および形状測定方法 |
| US17/921,402 US12504276B2 (en) | 2020-05-28 | 2021-05-10 | Shape measuring and vibration detection |
| PCT/JP2021/017730 WO2021241187A1 (ja) | 2020-05-28 | 2021-05-10 | 形状測定装置および形状測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020093416A JP7414643B2 (ja) | 2020-05-28 | 2020-05-28 | 形状測定装置および形状測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021189003A JP2021189003A (ja) | 2021-12-13 |
| JP7414643B2 true JP7414643B2 (ja) | 2024-01-16 |
Family
ID=78723388
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020093416A Active JP7414643B2 (ja) | 2020-05-28 | 2020-05-28 | 形状測定装置および形状測定方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12504276B2 (ja) |
| JP (1) | JP7414643B2 (ja) |
| WO (1) | WO2021241187A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4070915A1 (en) * | 2021-04-06 | 2022-10-12 | Agathon AG, Maschinenfabrik | Workpiece holder and method for manufacturing a rotational-symmetrical tool |
| CN114322830B (zh) * | 2021-12-29 | 2023-11-17 | 北方工业大学 | 复杂空心涡轮叶片在机检测装置及数据处理方法 |
| JP7768780B2 (ja) * | 2022-01-25 | 2025-11-12 | 株式会社ダイヘン | ロボット制御装置 |
| JP2024033391A (ja) * | 2022-08-30 | 2024-03-13 | 株式会社日立製作所 | 分析装置、測定方法 |
| JP2024177950A (ja) | 2023-06-12 | 2024-12-24 | 株式会社日立製作所 | 検査支援装置及び検査支援方法 |
| JP2025181299A (ja) * | 2024-05-31 | 2025-12-11 | 株式会社日立ハイテク | 計測システムおよび計測方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007125633A (ja) | 2005-11-02 | 2007-05-24 | Pulstec Industrial Co Ltd | 多自由度ロボットの位置決め誤差補正装置、同位置決め誤差補正方法および位置決め誤差補正用校正治具 |
| JP4667400B2 (ja) | 2007-01-16 | 2011-04-13 | 三菱電機株式会社 | Doe調整方法およびレーザ加工装置 |
| JP2018205301A (ja) | 2017-06-06 | 2018-12-27 | 株式会社日立製作所 | 距離測定装置、及び立体形状測定装置。 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0681520B2 (ja) * | 1988-11-15 | 1994-10-12 | 日立建機株式会社 | 微動機構の残留振動抑制装置 |
| JPH0882753A (ja) * | 1994-09-12 | 1996-03-26 | Kiriyuu Kikai Kk | 内面画像撮込装置 |
| JP4250538B2 (ja) * | 2004-01-27 | 2009-04-08 | パナソニック株式会社 | 揺動装置を有する多関節ロボット |
| JP5984406B2 (ja) * | 2012-02-01 | 2016-09-06 | キヤノン株式会社 | 測定装置 |
| WO2016084638A1 (ja) * | 2014-11-25 | 2016-06-02 | 並木精密宝石株式会社 | 光学式内面測定装置 |
| KR20160097401A (ko) * | 2015-02-06 | 2016-08-18 | 한국기술교육대학교 산학협력단 | 교육용 회전 이송장치의 정밀위치 제어장치 |
| JP6039718B2 (ja) * | 2015-03-05 | 2016-12-07 | 株式会社ミツトヨ | 測定プローブ |
| JP6692658B2 (ja) * | 2016-02-25 | 2020-05-13 | 株式会社ミツトヨ | 内壁測定装置及びオフセット量算出方法 |
| US11187521B2 (en) * | 2020-04-28 | 2021-11-30 | Mitutoyo Corporation | Rotating chromatic range sensor system with calibration object and method |
-
2020
- 2020-05-28 JP JP2020093416A patent/JP7414643B2/ja active Active
-
2021
- 2021-05-10 US US17/921,402 patent/US12504276B2/en active Active
- 2021-05-10 WO PCT/JP2021/017730 patent/WO2021241187A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007125633A (ja) | 2005-11-02 | 2007-05-24 | Pulstec Industrial Co Ltd | 多自由度ロボットの位置決め誤差補正装置、同位置決め誤差補正方法および位置決め誤差補正用校正治具 |
| JP4667400B2 (ja) | 2007-01-16 | 2011-04-13 | 三菱電機株式会社 | Doe調整方法およびレーザ加工装置 |
| JP2018205301A (ja) | 2017-06-06 | 2018-12-27 | 株式会社日立製作所 | 距離測定装置、及び立体形状測定装置。 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021189003A (ja) | 2021-12-13 |
| US20230194247A1 (en) | 2023-06-22 |
| WO2021241187A1 (ja) | 2021-12-02 |
| US12504276B2 (en) | 2025-12-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7414643B2 (ja) | 形状測定装置および形状測定方法 | |
| JP5695578B2 (ja) | ロボットアーム用位置情報測定装置及び方法 | |
| JP5599524B2 (ja) | レーザトラッカによる寸法データの自動計測 | |
| JP5653581B2 (ja) | 測定システム | |
| CN109551518B (zh) | 计测系统 | |
| CN101427153A (zh) | 基于摄影机的六自由度标靶测量和标靶跟踪设备 | |
| JP2009529132A (ja) | 計測装置を位置決めするための、および、大きな物体を計測するための、方法、システムおよびコンピュータプログラム | |
| CN101427155A (zh) | 具有能够旋转的反射镜的基于摄影机的六自由度标靶测量和标靶跟踪设备 | |
| JP7604317B2 (ja) | クロマティックレンジセンサシステム | |
| JP2008286797A (ja) | 非接触式振動測定方法およびそれを実施する装置 | |
| EP2138803B1 (en) | Jig for measuring an object shape and method for measuring a three-dimensional shape | |
| JP7475163B2 (ja) | 測定装置 | |
| JP6600928B1 (ja) | X線回折測定装置 | |
| JP5260175B2 (ja) | 非接触で対象表面の座標を測定する測定方法および測定システム | |
| JP2009526211A (ja) | 取扱装置の工具の動きを追跡するための装置及び方法 | |
| JPWO2014084131A1 (ja) | 形状測定装置、構造物製造システム、ステージシステム、形状測定方法、構造物製造方法、プログラムを記録した記録媒体 | |
| US7777874B2 (en) | Noncontact surface form measuring apparatus | |
| CN110953996A (zh) | 测量系统以及带有孔的轴的制造方法 | |
| JP5059700B2 (ja) | 被測定物形状測定治具及び三次元形状測定方法 | |
| JP4375710B2 (ja) | 3次元形状測定装置および3次元形状測定方法 | |
| JP2018066767A (ja) | 形状測定装置、構造物製造システム、及び形状測定方法 | |
| JP4925239B2 (ja) | 放射光軸ずれ角測定装置 | |
| JP2004294390A (ja) | 光学的三次元形状測定装置および測定方法 | |
| JP7337637B2 (ja) | レーザープローブ、及び光学調整方法 | |
| JP2015114235A (ja) | センサユニット、形状測定装置、及び構造物製造システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231228 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7414643 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |