JP7404362B2 - ステップアンドシュート及び動き補償陽電子放出断層撮影(pet)研究のためのエッジ保存ペナルティ付き再構成 - Google Patents
ステップアンドシュート及び動き補償陽電子放出断層撮影(pet)研究のためのエッジ保存ペナルティ付き再構成 Download PDFInfo
- Publication number
- JP7404362B2 JP7404362B2 JP2021525553A JP2021525553A JP7404362B2 JP 7404362 B2 JP7404362 B2 JP 7404362B2 JP 2021525553 A JP2021525553 A JP 2021525553A JP 2021525553 A JP2021525553 A JP 2021525553A JP 7404362 B2 JP7404362 B2 JP 7404362B2
- Authority
- JP
- Japan
- Prior art keywords
- volume
- penalty function
- voxel
- image
- local
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002600 positron emission tomography Methods 0.000 title claims description 40
- 238000003384 imaging method Methods 0.000 claims description 62
- 238000000034 method Methods 0.000 claims description 40
- 230000035945 sensitivity Effects 0.000 claims description 37
- 230000000241 respiratory effect Effects 0.000 claims description 34
- 230000008569 process Effects 0.000 claims description 24
- 238000012879 PET imaging Methods 0.000 claims description 11
- 230000009467 reduction Effects 0.000 claims description 5
- 230000002123 temporal effect Effects 0.000 claims description 2
- 230000006870 function Effects 0.000 description 38
- 230000008901 benefit Effects 0.000 description 10
- 238000002591 computed tomography Methods 0.000 description 10
- 238000004321 preservation Methods 0.000 description 9
- 238000013459 approach Methods 0.000 description 8
- 238000009472 formulation Methods 0.000 description 6
- 239000000203 mixture Substances 0.000 description 6
- 230000005855 radiation Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000001629 suppression Effects 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 238000009792 diffusion process Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000008520 organization Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000029058 respiratory gaseous exchange Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000009940 knitting Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/003—Reconstruction from projections, e.g. tomography
- G06T11/008—Specific post-processing after tomographic reconstruction, e.g. voxelisation, metal artifact correction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/003—Reconstruction from projections, e.g. tomography
- G06T11/006—Inverse problem, transformation from projection-space into object-space, e.g. transform methods, back-projection, algebraic methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/037—Emission tomography
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/424—Iterative
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Algebra (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Pure & Applied Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- High Energy & Nuclear Physics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description

この場合、
Claims (15)
- 撮像方法を実行するために少なくとも1つの電子プロセッサを含むワークステーションによって読み取り及び実行可能な命令を記憶する非一時的コンピュータ可読媒体であって、前記方法は、
軸方向に沿ってオーバーラップする隣接するフレームで前記軸方向に沿うフレームに対してフレームごとに撮像データを受信するステップであって、前記フレームは、少なくとも一つのボリューム(k)及び前記軸方向に沿って少なくとも部分的に前記ボリューム(k)をオーバーラップする後続ボリューム(k+1)を含む、ステップと、
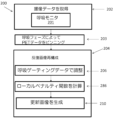
反復画像再構成プロセスを使用して前記ボリューム(k)の画像を生成するステップであって、前記反復画像再構成プロセスの反復は、
前記ボリューム(k)にわたってノイズを抑制するためにローカルペナルティ関数を計算するステップであって、オーバーラップ領域において前記ローカルペナルティ関数の値を低減するステップを含み、前記ローカルペナルティ関数は、ペナルティを課されるボクセルを通過する全同時カウントに依存し、前記ローカルペナルティ関数の値は、前記オーバラップ領域において、前記後続ボリュームk+1においてペナルティを課される前記ボクセルを通過する前記全同時カウントを補償する量だけ低減される、ステップと、
前記ボリューム(k)からの撮像データを使用し、さらに前記ローカルペナルティ関数を使用して、前記ボリューム(k)の更新画像を生成するステップと
を含む、ステップと
を有する、
非一時的コンピュータ可読媒体。 - 前記ローカルペナルティ関数はPET撮像装置の局所幾何学的感度に依存し、前記ローカルペナルティ関数の値は、前記ボリューム(k)の軸方向切頭幾何学的感度の損失を補償する量だけ、前記オーバーラップ領域において低減される、請求項1に記載の非一時的コンピュータ可読媒体。
- 前記ローカルペナルティ関数は、
に依存し、γは前記ローカルペナルティ関数のエッジ保存パラメータであり、iはボクセルをインデックスし、
は、その反復再構成nの前記更新画像nにおける前記ボリュームkの空間的な前記反復再構成における前記ボクセルiの値であり、si,kは、前記ボリュームkのデータを取得するときの前記ボクセルiに対する前記PET撮像装置の前記幾何学的感度であり、si,k+1は、前記ボリュームk+1のデータを取得するときのボクセルiに対する前記PET撮像装置の前記幾何学的感度である、請求項2に記載の非一時的コンピュータ可読媒体。
- 前記ペナルティ関数は、
に依存し、γは前記ローカルペナルティ関数のエッジ保存パラメータであり、iはボクセルをインデックスし、
は、その反復再構成nの前記更新画像nにおける前記ボリュームkの空間的な前記反復再構成における前記ボクセルiの値であり、Ci,kは、LORが前記ボクセルiを通過するボリュームkのベッド位置に対する前記データセットにおける同時事象の前記カウントである、請求項1に記載の非一時的コンピュータ可読媒体。
- 前記PET撮像装置は、飛行時間撮像装置であり、前記ペナルティ関数は、
に依存し、γは前記ローカルペナルティ関数のエッジ保存パラメータであり、iはボクセルをインデックスし、
は、その反復再構成nの前記更新画像nにおける前記ボリュームkの空間的な前記反復再構成における前記ボクセルiの値であり、Ci,kは、LORが前記ボクセルiを通過するボリュームkのベッド位置に対する前記データセットにおける同時事象の前記カウントであり、インデックスvは、LORが前記ボクセルiを通過するベッド位置kに対する前記データセットの前記Ci,k同時カウントにわたって走行し、wvは、vによりインデックスされる前記カウントが前記ボクセルi内で発生する飛行時間確率である、請求項4に記載の非一時的コンピュータ可読媒体。
- 前記再構成するステップは、
前記撮像データの他のボリューム(k)とは別に前記撮像データの前記ボリューム(k)を再構成画像に再構成するステップ
を含む、請求項1乃至5の何れか一項に記載の非一時的コンピュータ可読媒体。 - 前記再構成するステップは、
前記撮像データ内の前記ボリューム(k)からの前記カウント数を全ボリュームに結合するステップと、
前記全ボリュームを再構成画像に再構成するステップと
を含む、請求項1乃至5の何れか一項に記載の非一時的コンピュータ可読媒体。 - 前記ローカルペナルティ関数は、
に依存し、γは前記ローカルペナルティ関数のエッジ保存パラメータであり、iはボクセルをインデックスし、
は、その反復再構成nの前記更新画像nにおける前記ボリュームkの空間的な前記反復再構成における前記ボクセルiの値であり、si,kは、前記ボリュームkのデータを取得するときの前記ボクセルiに対する前記PET撮像装置の前記幾何学的感度であり、si,k+1は、前記ボリュームk+1のデータを取得するときのボクセルiに対する前記PET撮像装置の前記幾何学的感度である、請求項7に記載の非一時的コンピュータ可読媒体。
- 前記オーバーラップ領域における前記ローカルペナルティ関数の値の前記低減は、前記ボリューム(k)及び前記後続ボリュームk+1に対するそれぞれの取得時間の比率に基づいてスケーリングされる、請求項1乃至7の何れか一項に記載の非一時的コンピュータ可読媒体。
- 撮像システムであって、
陽電子放出断層撮影(PET)画像装置と、
少なくとも一つの電子プロセッサであって、
軸方向に沿ってオーバーラップする隣接するフレームで前記軸方向に沿うフレームに対してフレームごとに撮像データを受信し、前記フレームは、少なくとも一つのボリューム(k)及び前記軸方向に沿って少なくとも部分的に前記ボリューム(k)をオーバーラップする後続ボリューム(k+1)を含み、
反復画像再構成プロセスを使用して前記ボリューム(k)の画像を生成し、前記反復画像再構成プロセスの反復は、
オーバーラップ領域においてローカルペナルティ関数の値を低減することを含んで、前記ボリューム(k)にわたってノイズを抑制するために前記ローカルペナルティ関数を計算し、前記ローカルペナルティ関数は、ペナルティを課されるボクセルを通過する全同時カウントに依存し、前記ローカルペナルティ関数の値は、前記オーバーラップ領域において、前記後続ボリュームk+1においてペナルティを課される前記ボクセルを通過する前記全同時カウントを補償する量だけ低減され、
前記ボリューム(k)からの撮像データを使用し、さらに前記ローカルペナルティ関数を使用して、前記ボリューム(k)の更新画像を生成し、
前記再構成は、
前記撮像データ内の前記ボリューム(k)からの前記カウント数を全ボリュームに結合し、
前記全ボリュームを再構成画像に再構成する
ようにプログラムされる、少なくとも一つの電子プロセッサと
を有する、撮像システム。 - 軸方向に沿ってオーバーラップする隣接するフレームで前記軸方向に沿うフレームに対してフレームごとに撮像データについて実行される撮像方法であって、前記フレームは、少なくとも一つのボリューム(k)及び前記軸方向に沿って少なくとも部分的に前記ボリューム(k)をオーバーラップする後続ボリューム(k+1)を含み、前記方法は、
反復画像再構成プロセスを使用して前記ボリューム(k)の画像を生成するステップであって、前記反復画像再構成プロセスの反復は、
オーバーラップ領域においてローカルペナルティ関数の値を低減することを含んで、前記ボリューム(k)にわたってノイズを抑制するために前記ローカルペナルティ関数を計算するステップであって、前記ローカルペナルティ関数は、PET撮像装置の局所幾何学的感度に依存し、前記ローカルペナルティ関数の値は、前記ボリューム(k)の軸方向切頭幾何学的感度の損失を補償する量だけ、前記オーバーラップ領域において低減される、ステップと、
前記ボリューム(k)からの撮像データを使用し、さらに前記ローカルペナルティ関数を使用して、前記ボリューム(k)の更新画像を生成するステップと
を有し、
前記再構成は、
前記撮像データの他のボリューム(k)とは別に前記撮像データの前記ボリューム(k)を再構成画像に再構成するステップ
を含む、方法。 - 前記ローカルペナルティ関数は、
に依存し、γは前記ローカルペナルティ関数のエッジ保存パラメータであり、iはボクセルをインデックスし、
は、その反復再構成nの前記更新画像nにおける前記ボリュームkの空間的な前記反復再構成における前記ボクセルiの値であり、si,kは、前記ボリュームkのデータを取得するときのボクセルiに対する前記PET撮像装置の前記幾何学的感度であり、si,k+1は、前記ボリュームk+1のデータを取得するときのボクセルiに対する前記PET撮像装置の前記幾何学的感度である、
請求項11に記載の撮像方法。 - 前記オーバーラップ領域における前記ローカルペナルティ関数の値の低減は、前記ボリューム(k)及び前記後続ボリュームk+1に対するそれぞれの取得時間の比に基づいてスケーリングされる、請求項11乃至12の何れか一項に記載の撮像方法。
- 軸方向に沿ってオーバーラップする隣接するフレームで前記軸方向に沿うフレームに対してフレームごとに撮像データについて実行される撮像方法であって、前記フレームは、少なくとも一つのボリューム(k)及び前記軸方向に沿って少なくとも部分的に前記ボリューム(k)をオーバーラップする後続ボリューム(k+1)を含み、前記方法は、
反復画像再構成プロセスを使用して前記ボリューム(k)の画像を生成するステップであって、前記反復画像再構成プロセスの反復は、
二つ又はそれより多くのゲートフェーズ及び前記ゲートフェーズで検出される動きを使用して、呼吸ゲーティングで前記撮像データを調整するステップと、
オーバーラップ領域においてローカルペナルティ関数の値を低減することを含んで、前記ボリューム(k)にわたってノイズを抑制するために前記ローカルペナルティ関数を計算するステップと、
前記ボリューム(k)からの撮像データを使用し、さらに前記ローカルペナルティ関数を使用して、前記ボリューム(k)の更新画像を生成するステップと
を有する、方法。 - 前記調整は、
に従って実行され、γはエッジ保存パラメータであり、iはボクセルであり、fは前記ボクセルのグレースケール値であり、sは前記ボクセルを通過する幾何学的感度であり、△rは2つのゲートフェーズφkとφk+1との間の動きベクトルである、
請求項14に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862768131P | 2018-11-16 | 2018-11-16 | |
| US62/768,131 | 2018-11-16 | ||
| PCT/EP2019/081515 WO2020099649A1 (en) | 2018-11-16 | 2019-11-15 | Edge preserving penalized reconstruction for step-and-shoot and motion compensated positron emission tomography (pet) studies |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022507135A JP2022507135A (ja) | 2022-01-18 |
| JPWO2020099649A5 JPWO2020099649A5 (ja) | 2022-11-18 |
| JP7404362B2 true JP7404362B2 (ja) | 2023-12-25 |
Family
ID=68583433
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021525553A Active JP7404362B2 (ja) | 2018-11-16 | 2019-11-15 | ステップアンドシュート及び動き補償陽電子放出断層撮影(pet)研究のためのエッジ保存ペナルティ付き再構成 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220012928A1 (ja) |
| EP (1) | EP3881290A1 (ja) |
| JP (1) | JP7404362B2 (ja) |
| CN (1) | CN113039582A (ja) |
| WO (1) | WO2020099649A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012045318A (ja) | 2010-08-30 | 2012-03-08 | Toshiba Corp | 放射線イメージング装置、画像処理装置及び画像処理プログラム |
| JP2016050932A (ja) | 2014-08-28 | 2016-04-11 | 株式会社東芝 | 散乱線推定方法、非一時的コンピュータ可読媒体及び散乱線推定装置 |
| US20170103551A1 (en) | 2015-10-13 | 2017-04-13 | Shenyang Neusoft Medical Systems Co., Ltd. | Reconstruction and combination of pet multi-bed image |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7173248B2 (en) * | 2004-10-20 | 2007-02-06 | General Electric Company | Methods and systems for positron emission tomography data correction |
| US7983465B2 (en) * | 2007-05-09 | 2011-07-19 | Société De Commercialisation Des Produits De La Recherche Appliquée - Socpra Sciences Santé Et Humaines, S.E.C. | Image reconstruction methods based on block circulant system matrices |
| WO2012095713A1 (en) * | 2011-01-10 | 2012-07-19 | Koninklijke Philips Electronics N.V. | Dual -energy tomographic imaging system |
| US8569706B2 (en) * | 2011-06-03 | 2013-10-29 | General Electric Company | Method and system for processing gated image data |
| CN102324089B (zh) * | 2011-07-13 | 2013-04-03 | 南方医科大学 | 基于广义熵与mr先验的pet图像最大后验重建方法 |
| WO2015044237A1 (en) * | 2013-09-30 | 2015-04-02 | Koninklijke Philips N.V. | Method for local adjustment of regularization parameters for image quality optimization in fully 3d iterative ct reconstruction |
| US9031300B1 (en) * | 2013-10-25 | 2015-05-12 | General Electric Company | System and method reconstructing a nuclear medicine image using deformed attenuation image |
| CN103559728B (zh) * | 2013-10-31 | 2017-05-03 | 南方医科大学 | 基于解剖功能联合先验模型的pet图像最大后验重建方法 |
| US10022097B2 (en) * | 2014-06-16 | 2018-07-17 | University Of Southern California | Direct patlak estimation from list-mode PET data |
| WO2016091594A1 (en) * | 2014-12-10 | 2016-06-16 | Koninklijke Philips N.V. | Statistically weighted regularization in multi-contrast imaging |
| US9474495B2 (en) * | 2014-12-22 | 2016-10-25 | General Electric Company | System and method for joint estimation of attenuation and activity information |
| US9747701B2 (en) * | 2015-08-20 | 2017-08-29 | General Electric Company | Systems and methods for emission tomography quantitation |
| US10078889B2 (en) * | 2015-08-25 | 2018-09-18 | Shanghai United Imaging Healthcare Co., Ltd. | System and method for image calibration |
| US10002445B2 (en) * | 2016-02-26 | 2018-06-19 | Wisconsin Alumni Research Foundation | System and method for resolving artifacts in four-dimensional angiographic data |
| JP7041128B6 (ja) * | 2016-09-30 | 2022-05-30 | コーニンクレッカ フィリップス エヌ ヴェ | ノイズに起因するアーチファクト形成の動的抑制を用いた反復画像再構成 |
| CN108010093B (zh) * | 2016-10-31 | 2021-01-15 | 上海东软医疗科技有限公司 | 一种pet图像重建方法和装置 |
| EP3555859B1 (en) * | 2016-12-14 | 2021-11-03 | Koninklijke Philips N.V. | Information-adaptive regularization for iterative image reconstruction |
-
2019
- 2019-11-15 CN CN201980075271.4A patent/CN113039582A/zh active Pending
- 2019-11-15 JP JP2021525553A patent/JP7404362B2/ja active Active
- 2019-11-15 WO PCT/EP2019/081515 patent/WO2020099649A1/en unknown
- 2019-11-15 US US17/293,958 patent/US20220012928A1/en active Pending
- 2019-11-15 EP EP19805275.5A patent/EP3881290A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012045318A (ja) | 2010-08-30 | 2012-03-08 | Toshiba Corp | 放射線イメージング装置、画像処理装置及び画像処理プログラム |
| JP2016050932A (ja) | 2014-08-28 | 2016-04-11 | 株式会社東芝 | 散乱線推定方法、非一時的コンピュータ可読媒体及び散乱線推定装置 |
| US20170103551A1 (en) | 2015-10-13 | 2017-04-13 | Shenyang Neusoft Medical Systems Co., Ltd. | Reconstruction and combination of pet multi-bed image |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220012928A1 (en) | 2022-01-13 |
| EP3881290A1 (en) | 2021-09-22 |
| CN113039582A (zh) | 2021-06-25 |
| WO2020099649A1 (en) | 2020-05-22 |
| JP2022507135A (ja) | 2022-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8351671B2 (en) | Motion correction in nuclear imaging | |
| US8233682B2 (en) | Methods and systems for improving spatial and temporal resolution of computed images of moving objects | |
| US8600137B2 (en) | Iterative CT image reconstruction with a four-dimensional noise filter | |
| EP1522045B1 (en) | Motion artifact correction of tomographical images | |
| US10013780B2 (en) | Systems and methods for artifact removal for computed tomography imaging | |
| JP6169558B2 (ja) | コントラスト依存の解像度をもつ画像 | |
| CN104424659B (zh) | 图像数据的基于图像的运动补偿 | |
| US20080267455A1 (en) | Method for Movement Compensation of Image Data | |
| JP2014517277A (ja) | リストモードダイナミックイメージ再構成 | |
| US11210820B2 (en) | Iterative image reconstruction with dynamic suppression of formation of noise-induced artifacts | |
| JP7232192B2 (ja) | データ駆動型呼吸性体動推定方法 | |
| Gravier et al. | Fully 4D motion-compensated reconstruction of cardiac SPECT images | |
| Qi et al. | 4-D reconstruction with respiratory correction for gated myocardial perfusion SPECT | |
| EP1500051B1 (en) | Organ-specific backprojection | |
| JP7404362B2 (ja) | ステップアンドシュート及び動き補償陽電子放出断層撮影(pet)研究のためのエッジ保存ペナルティ付き再構成 | |
| US10152805B2 (en) | Image processing method, image processing apparatus and radiation tomographic imaging apparatus, and program | |
| Forthmann et al. | Penalized maximum-likelihood sinogram restoration for dual focal spot computed tomography | |
| US11009615B2 (en) | Time-of-flight resolution-adaptive image regularization and filtering in positron emission tomography | |
| US20230410264A1 (en) | Reduction of artefacts in a cone beam computed tomography | |
| Bhagalia et al. | Non-rigid Registration-based Coronary Artery Motion Correction | |
| JPWO2020099649A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230810 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7404362 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |