JP7380656B2 - イベント記録システム、イベント記録装置、イベント記録方法、イベント記録プログラム - Google Patents
イベント記録システム、イベント記録装置、イベント記録方法、イベント記録プログラム Download PDFInfo
- Publication number
- JP7380656B2 JP7380656B2 JP2021123368A JP2021123368A JP7380656B2 JP 7380656 B2 JP7380656 B2 JP 7380656B2 JP 2021123368 A JP2021123368 A JP 2021123368A JP 2021123368 A JP2021123368 A JP 2021123368A JP 7380656 B2 JP7380656 B2 JP 7380656B2
- Authority
- JP
- Japan
- Prior art keywords
- pair
- host vehicle
- recording
- target objects
- event
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 48
- 238000001514 detection method Methods 0.000 claims description 107
- 238000009434 installation Methods 0.000 claims description 39
- 230000004044 response Effects 0.000 claims description 18
- 238000003384 imaging method Methods 0.000 claims description 15
- 230000003247 decreasing effect Effects 0.000 claims description 8
- 238000006073 displacement reaction Methods 0.000 claims description 7
- 230000002123 temporal effect Effects 0.000 claims description 2
- 230000000116 mitigating effect Effects 0.000 claims 1
- 238000012545 processing Methods 0.000 description 56
- 238000004891 communication Methods 0.000 description 24
- 230000008569 process Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 9
- 230000005484 gravity Effects 0.000 description 7
- 230000035807 sensation Effects 0.000 description 7
- 230000006399 behavior Effects 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 230000000638 stimulation Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000004936 stimulating effect Effects 0.000 description 3
- 238000004378 air conditioning Methods 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/127—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station
- G08G1/13—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station the indicator being in the form of a map
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/08—Detecting or categorising vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Chemical & Material Sciences (AREA)
- Theoretical Computer Science (AREA)
- Analytical Chemistry (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Time Recorders, Dirve Recorders, Access Control (AREA)
Description
又、特許文献2には、業務用車両についてリスクが予測される接触イベントの発生を検出する技術が開示されている。この技術では、業務用車両の車速センサから出力される車速パルスのパルス数の減少率(すなわち負の加速度)又は角速度が判定基準値以上のときに当該車両の接触イベントの発生を検出する。
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を規定された記録期間において記録することと、
を実行するように構成され、
検出情報を記録することは、走行継続中のホスト車両において、ペアの追跡によるペアに関する検出情報に応じて、記録期間においてホスト車両の位置からペアを撮像するために外界カメラの制御パラメータを調整することを含む。
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を規定された記録期間において記録することと、
を実行するように構成され、
検出情報を記録することは、走行継続中のホスト車両において、ペアの追跡によるペアに関する検出情報に応じて、記録期間においてホスト車両の位置からペアを撮像するために外界カメラの制御パラメータを調整することを含む。
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を規定された記録期間において記録することと、
を含み、
検出情報を記録することは、走行継続中のホスト車両において、ペアの追跡によるペアに関する検出情報に応じて、記録期間においてホスト車両の位置からペアを撮像するために外界カメラの制御パラメータを調整することを含む。
命令は、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定させることと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を規定された記録期間において記録させることと、
を含み、
検出情報を記録させることは、走行継続中のホスト車両において、ペアの追跡によるペアに関する検出情報に応じて、記録期間においてホスト車両の位置からペアを撮像するために外界カメラの制御パラメータを調整させることを含む。
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアの接触部分が外界カメラの画角内に含まれる期間までに、ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を実行するように構成される。
本開示の第六態様は、プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録システムであって、
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアに関する検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)をホスト車両に走行させることと、
を実行するように構成される。
本開示の第七態様は、プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録システムであって、
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアに関する検出情報の記録に応じて、ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)をホスト車両に走行させることを実行するように構成される。
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアの接触部分が外界カメラの画角内に含まれる期間までに、ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を実行するように構成される。
本開示の第九態様は、プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録装置であって、
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアに関する検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)をホスト車両に走行させることと、
を実行するように構成される。
本開示の第十態様は、プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録装置であって、
プロセッサは、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアに関する検出情報の記録に応じて、ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)をホスト車両に走行させることと、
を実行するように構成される。
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアの接触部分が外界カメラの画角内に含まれる期間までに、ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を含む。
本開示の第十二態様は、外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、プロセッサ(102)により実行されるイベント記録方法であって、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアに関する検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)をホスト車両に走行させることと、
を含む。
本開示の第十三態様は、外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、プロセッサ(102)により実行されるイベント記録方法であって、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定することと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録することと、
ペアに関する検出情報の記録に応じて、ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)をホスト車両に走行させることと、
を含む。
命令は、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定させることと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録させることと、
ペアの接触部分が外界カメラの画角内に含まれる期間までに、ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を含む。
本開示の第十五態様は、外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含むイベント記録プログラムであって、
命令は、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定させることと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録させることと、
ペアに関する検出情報の記録に応じて、ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)をホスト車両に走行させることと、
を含む。
本開示の第十六態様は、外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含むイベント記録プログラムであって、
命令は、
ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能なターゲット物体についての移動速度、及びターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、接触イベントの発生有無を判定させることと、
接触イベントの発生有りと判定されたターゲット物体のペア(P)を追跡してペアに関する外界カメラによる検出情報を記録させることと、
ペアに関する検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)をホスト車両に走行させることと、
を含む。
図1に示す第一実施形態のイベント記録システム100は、図2に示すホスト車両Aの周辺において発生した接触イベントを記録する。ホスト車両Aを中心とする視点において、ホスト車両Aは自車両(ego-vehicle)であるともいえる。ホスト車両Aを中心とする視点において、ターゲット物体Bは他道路ユーザであるともいえる。ターゲット物体Bは、例えば、車両(四輪車及び二輪車を含む)、道路設置物、及び人物を含む。道路設置物は、例えば、ガードレール、道路標識、信号機、歩道橋、塀、ビル及び民家等の施設建築物等のうち少なくとも一種類以上を含んでいる。又、ここでの人物は、歩行者及びランナー等、道路上において移動に車両を利用していない人物である。


前方被写界深度=許容錯乱円×F値×被写体距離2/(焦点距離2+許容錯乱円×F値×被写体距離) ・・・(4)
後方被写界深度=許容錯乱円×F値×被写体距離2/(焦点距離2-許容錯乱円×F値×被写体距離) ・・・(5)
被写界深度=前方被写界深度+後方被写界深度 ・・・(6)
尚、対応処理ブロック150は、F値が予め規定された限界値に到達した場合には、F値の調整を停止する。
vp=k×v/x2 ・・・(7)
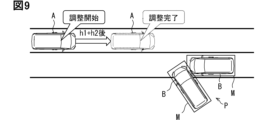
ここで、kは、外界カメラの画角及びペアPからホスト車両Aの走行軌道までの距離yにより決定される定数である。対応処理ブロック150は、数式(4)に基づき、変位速度vpに応じた(例えば比例した)フレームレートを設定する。尚、対応処理ブロック150は、フレームレートが予め規定された限界値に到達している場合には、フレームレートの調整を停止する。図10において、距離yは、ペアPのホスト車両A側の端部からの距離としている。又は、距離yは、ペアPの接触位置であってもよいし、ペアPの中心位置であってもよい。
本開示の第二実施形態は、第一実施形態の変形例である。第二実施形態において、接触判定ブロック130は、二輪車に分類されるターゲット物体Bについて、さらに、駆動源を備える二輪車と駆動源を備えない二輪車とに分類してもよい。駆動源を備える二輪車は、例えば、オートバイ及び原動機付自転車等である。駆動源を備えない二輪車は、例えば、自転車等である。
本開示の第三実施形態は、第一実施形態の変形例である。第三実施形態の対応処理ブロック150は、フレームレートの制御を、ターゲット物体Bとホスト車両Aとの間の相対速度及びホスト車両Aのヨーレートのうち少なくとも一種類以上に基づいて実行する。例えば、対応処理ブロック150は、相対速度が大きいほど、フレームレートを大きくする。又、対応処理ブロック150は、ヨーレートが大きいほど、フレームレートを大きくする。
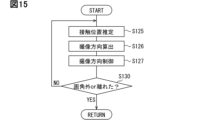
本開示の第四実施形態は、第一実施形態の変形例である。第三実施形態の対応処理ブロック150は、外界カメラの制御パラメータとして、撮像方向を調整する。この場合、外界カメラは、撮像方向を変更可能なアクチュエータ等が取り付けられているとする。例えば、対応処理ブロック150は、ペアPの接触位置を指向するように、撮像方向を調整する。
以上、複数の実施形態について説明したが、本開示は、それらの実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
Claims (24)
- プロセッサ(102)を有し、外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録システムであって、
プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を規定された記録期間において記録することと、
を実行するように構成され、
前記検出情報を記録することは、走行継続中の前記ホスト車両において、前記ペアの追跡による前記ペアに関する前記検出情報に応じて、前記記録期間において前記ホスト車両の位置から前記ペアを撮像するために前記外界カメラの制御パラメータを調整することを含むイベント記録システム。 - 前記制御パラメータを調整することは、外界カメラの焦点距離、露出値、F値、フレームレート及び撮像方向の少なくとも一種類を制御することを含む請求項1に記載のイベント記録システム。
- 前記制御パラメータを調整することは、調整開始から撮像までの応答遅れ時間を予測し、前記応答遅れ時間に基づき、前記焦点距離及び前記露出値の少なくとも一方を制御することを含む請求項2に記載のイベント記録システム。
- 前記制御パラメータを調整することは、前記ホスト車両から前記ペアまでの距離に応じた被写界深度に基づき、前記F値を制御することを含む請求項2又は請求項3に記載のイベント記録システム。
- 前記制御パラメータを調整することは、前記ペアの撮像画像上での変位速度に基づき、前記フレームレートを制御することを含む請求項2から請求項4のいずれか1項に記載のイベント記録システム。
- 前記制御パラメータを調整することは、前記ホスト車両の運動物理量に基づき、前記フレームレートを制御することを含む請求項2から請求項4のいずれか1項に記載のイベント記録システム。
- 前記ペアに関する前記検出情報の記録に応じて、前記ホスト車両の走行挙動を制御することをさらに実行するように構成される請求項1から請求項6のいずれか1項に記載のイベント記録システム。
- 前記走行挙動を制御することは、少なくとも前記ペアの前記接触イベントに関連する特定範囲に関する前記検出情報が記録される期間において、走行継続中の前記ホスト車両による前記検出情報の検出位置に関する時間変化を緩和することを含む請求項7に記載のイベント記録システム。
- 前記走行挙動を制御することは、前記ホスト車両の走行ルートを、前記記録を実行しない場合の前記走行ルートから変更することを含む請求項7又は請求項8に記載のイベント記録システム。
- プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録システムであって、
前記プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアの接触部分が前記外界カメラの画角内に含まれる期間までに、前記ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を実行するように構成されるイベント記録システム。 - プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録システムであって、
前記プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアに関する前記検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、前記ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)を前記ホスト車両に走行させることを実行するように構成されるイベント記録システム。 - プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録システムであって、
前記プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアに関する前記検出情報の記録に応じて、前記ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)を前記ホスト車両に走行させることを実行するように構成されるイベント記録システム。 - プロセッサ(102)を有し、外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録装置であって、
前記プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を規定された記録期間において記録することと、
を実行するように構成され、
前記検出情報を記録することは、走行継続中の前記ホスト車両において、前記ペアの追跡による前記ペアに関する前記検出情報に応じて、前記記録期間において前記ホスト車両の位置から前記ペアを撮像するために前記外界カメラの制御パラメータを調整することを含むイベント記録装置。 - プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録装置であって、
前記プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアの接触部分が前記外界カメラの画角内に含まれる期間までに、前記ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を実行するように構成されるイベント記録装置。 - プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録装置であって、
前記プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアに関する前記検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、前記ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)を前記ホスト車両に走行させることと、
を実行するように構成されるイベント記録装置。 - プロセッサ(102)を有し、外界についての検出情報を検出する外界センサを搭載したホスト車両(A)の周辺において発生した接触イベントを記録するイベント記録装置であって、
前記プロセッサは、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアに関する前記検出情報の記録に応じて、前記ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)を前記ホスト車両に走行させることと、
を実行するように構成されるイベント記録装置。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、プロセッサ(102)により実行されるイベント記録方法であって、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を規定された記録期間において記録することと、
を含み、
前記検出情報を記録することは、走行継続中の前記ホスト車両において、前記ペアの追跡による前記ペアに関する前記検出情報に応じて、前記記録期間において前記ホスト車両の位置から前記ペアを撮像するために前記外界カメラの制御パラメータを調整することを含むイベント記録方法。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、プロセッサ(102)により実行されるイベント記録方法であって、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアの接触部分が前記外界カメラの画角内に含まれる期間までに、前記ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を含むイベント記録方法。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、プロセッサ(102)により実行されるイベント記録方法であって、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアに関する前記検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、前記ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)を前記ホスト車両に走行させることと、
を含むイベント記録方法。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、プロセッサ(102)により実行されるイベント記録方法であって、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定することと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録することと、
前記ペアに関する前記検出情報の記録に応じて、前記ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)を前記ホスト車両に走行させることと、
を含むイベント記録方法。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含むイベント記録プログラムであって、
前記命令は、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定させることと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を規定された記録期間において記録させることと、
を含み、
前記検出情報を記録させることは、走行継続中の前記ホスト車両において、前記ペアの追跡による前記ペアに関する前記検出情報に応じて、前記記録期間において前記ホスト車両の位置から前記ペアを撮像するために前記外界カメラの制御パラメータを調整させることを含むイベント記録プログラム。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含むイベント記録プログラムであって、
前記命令は、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定させることと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録させることと、
前記ペアの接触部分が前記外界カメラの画角内に含まれる期間までに、前記ホスト車両の走行速度を所定の速度範囲まで減速させることと、
を含むイベント記録プログラム。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含むイベント記録プログラムであって、
前記命令は、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定させることと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録させることと、
前記ペアに関する前記検出情報の記録に応じて、記録を実行しない場合の走行ルートに対して、前記ターゲット物体が画角に入る時間が長くなるような記録走行ルート(RR)を前記ホスト車両に走行させることと、
を含むイベント記録プログラム。 - 外界についての検出情報を検出する外界センサ(11)を搭載したホスト車両(A)の周辺において発生した接触イベントを記録するために、記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含むイベント記録プログラムであって、
前記命令は、
前記ホスト車両以外の道路ユーザ及び道路設置物のうち少なくとも一種類を含む複数のターゲット物体(B)について、種別、移動可能な前記ターゲット物体についての移動速度、及び前記ターゲット物体をモデル化したターゲットモデル(M)同士の重複有無に基づいて、前記接触イベントの発生有無を判定させることと、
前記接触イベントの発生有りと判定された前記ターゲット物体のペア(P)を追跡して前記ペアに関する外界カメラによる前記検出情報を記録させることと、
前記ペアに関する前記検出情報の記録に応じて、前記ペアに対して所望の焦点距離を確保できるような記録走行ルート(RR)を前記ホスト車両に走行させることと、
を含むイベント記録プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021123368A JP7380656B2 (ja) | 2021-07-28 | 2021-07-28 | イベント記録システム、イベント記録装置、イベント記録方法、イベント記録プログラム |
| PCT/JP2022/025360 WO2023008022A1 (ja) | 2021-07-28 | 2022-06-24 | イベント記録システム、イベント記録装置、イベント記録方法、イベント記録プログラム |
| US18/423,088 US20240161607A1 (en) | 2021-07-28 | 2024-01-25 | Event recording system, event recording device, and event recording method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021123368A JP7380656B2 (ja) | 2021-07-28 | 2021-07-28 | イベント記録システム、イベント記録装置、イベント記録方法、イベント記録プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2023018961A JP2023018961A (ja) | 2023-02-09 |
| JP2023018961A5 JP2023018961A5 (ja) | 2023-05-01 |
| JP7380656B2 true JP7380656B2 (ja) | 2023-11-15 |
Family
ID=85087898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021123368A Active JP7380656B2 (ja) | 2021-07-28 | 2021-07-28 | イベント記録システム、イベント記録装置、イベント記録方法、イベント記録プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20240161607A1 (ja) |
| JP (1) | JP7380656B2 (ja) |
| WO (1) | WO2023008022A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015156097A1 (ja) | 2014-04-08 | 2015-10-15 | 三菱電機株式会社 | 衝突防止装置 |
| US20190103026A1 (en) | 2017-09-29 | 2019-04-04 | Uber Technologies, Inc. | Image Processing for Vehicle Collision Avoidance System |
| JP2020042712A (ja) | 2018-09-13 | 2020-03-19 | 株式会社Jvcケンウッド | 映像記録制御装置、映像記録システム、映像記録方法、および映像記録制御プログラム |
| WO2021075373A1 (ja) | 2019-10-18 | 2021-04-22 | ソニー株式会社 | 情報処理システム、情報処理方法及び情報処理装置 |
-
2021
- 2021-07-28 JP JP2021123368A patent/JP7380656B2/ja active Active
-
2022
- 2022-06-24 WO PCT/JP2022/025360 patent/WO2023008022A1/ja active Application Filing
-
2024
- 2024-01-25 US US18/423,088 patent/US20240161607A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015156097A1 (ja) | 2014-04-08 | 2015-10-15 | 三菱電機株式会社 | 衝突防止装置 |
| US20190103026A1 (en) | 2017-09-29 | 2019-04-04 | Uber Technologies, Inc. | Image Processing for Vehicle Collision Avoidance System |
| JP2020042712A (ja) | 2018-09-13 | 2020-03-19 | 株式会社Jvcケンウッド | 映像記録制御装置、映像記録システム、映像記録方法、および映像記録制御プログラム |
| WO2021075373A1 (ja) | 2019-10-18 | 2021-04-22 | ソニー株式会社 | 情報処理システム、情報処理方法及び情報処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023018961A (ja) | 2023-02-09 |
| WO2023008022A1 (ja) | 2023-02-02 |
| US20240161607A1 (en) | 2024-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110641472B (zh) | 基于神经网络的用于自主车辆的安全监控系统 | |
| US11545033B2 (en) | Evaluation framework for predicted trajectories in autonomous driving vehicle traffic prediction | |
| US11367354B2 (en) | Traffic prediction based on map images for autonomous driving | |
| CN110023168B (zh) | 车辆控制系统、车辆控制方法及车辆控制程序 | |
| CN115175841A (zh) | 自主车辆的行为规划 | |
| CN111133448A (zh) | 使用安全到达时间控制自动驾驶车辆 | |
| KR20180074676A (ko) | 자율 주행 차량의 조향률의 동적 조정 | |
| WO2020062032A1 (en) | A pedestrian probability prediction system for autonomous vehicles | |
| CN112046501A (zh) | 自动驾驶装置和方法 | |
| CN113950703B (zh) | 确定外参矩阵是否准确的方法、装置及数据处理系统 | |
| CN114026463B (zh) | 基于部分点云的行人速度估计方法 | |
| CN111380534A (zh) | 用于自动驾驶车辆的基于st图学习的决策 | |
| CN111724627B (zh) | 检测前方车辆向后滑动的自动告警系统 | |
| US20220253065A1 (en) | Information processing apparatus, information processing method, and information processing program | |
| KR20210037791A (ko) | 자율 주행 장치 및 방법 | |
| US11254326B2 (en) | Automatic comfort score system based on human driving reference data | |
| KR20240035960A (ko) | 자율 주행 장치 및 방법 | |
| CN115257813B (zh) | 通过施工障碍物的智能驾驶控制方法及车辆 | |
| JP7380656B2 (ja) | イベント記録システム、イベント記録装置、イベント記録方法、イベント記録プログラム | |
| JP7537450B2 (ja) | 車両制御装置、車両制御方法及び車両制御用コンピュータプログラム | |
| US20200133270A1 (en) | Lidar device with cylindrical lens for autonomous driving vehicles | |
| KR102530702B1 (ko) | 자율 주행 장치 및 방법 | |
| KR102616971B1 (ko) | 자율 주행 장치 및 방법 | |
| JP2017194930A (ja) | 移動体の自動運転制御システム | |
| KR20200133443A (ko) | 자율 주행 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230421 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230822 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231016 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7380656 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |