本開示は、本明細書の説明に記載又は図面に示される構成の詳細及び構成要素の配列に対するその用途に限定されないことを理解されたい。本開示の教示は、他の実施形態で使用及び実施され得、様々な方法で実施又は実行され得る。また、本明細書で使用される表現及び専門用語は、説明の目的のためであり、限定するものと見なされるべきではないことを理解されたい。本明細書の「含む」、「備える」、又は「有する」、及びその変形の使用は、その後に列挙された項目及びその等価物、並びに追加の項目を包含することを意味する。別途指定されない限り、又は限定されない限り、「取り付けられた」、「接続された」、「支持された」、及び「連結された」等の用語並びにそれらの変形は、広く使用され、直接及び間接的な取り付け、接続、支持、及び連結の両方を包含する。更に、「接続された」及び「連結された」は、物理的又は機械的接続又は連結に限定されない。
以下の考察は、当業者が本開示の実施形態を作製及び使用することを可能にするために提示されるものである。図示された実施形態に対する様々な修正は、当業者には、非常に明らかであり、本明細書の原理は、本開示の実施形態から逸脱することなく、他の実施形態及び用途に適用され得る。したがって、実施形態は、示される実施形態に限定されることを意図するものではなく、本明細書に開示される原理及び特徴と一致する最も広い範囲を与えられるべきである。以下の詳細な説明は、図面を参照して読まれるべきであり、異なる図の同様の要素は、同様の参照番号を有する。図は必ずしも縮尺通りではなく、選択された実施形態を示し、実施形態の範囲を限定することを意図するものではない。当業者は、本明細書で提供される実施例が、多くの有用な代替物を有し、実施形態の範囲内にあることを認識するであろう。
ここで図面を参照する。図1及び図2は、例示的な一実施形態による外科手術ロボットシステム100を示す。外科手術ロボットシステム100は、例えば、外科手術ロボット102と、1本以上のロボットアーム104と、ベース106と、ディスプレイ110と、例えば、ガイドチューブ114を含むエンドエフェクタ112と、1つ以上の追跡マーカ118とを含み得る。外科手術ロボットシステム100はまた、患者210に(例えば、患者210の骨に)直接固定されるように適合された1つ以上の追跡マーカ118を含む、患者追跡デバイス116を含み得る。外科手術ロボットシステム100はまた、例えばカメラスタンド202上に配置された、カメラ200をも利用し得る。カメラスタンド202は、カメラ200を所望の位置に移動、配向、及び支持するための任意の好適な構成を有することができる。カメラ200は、例えば、カメラ200の視点から視認可能な所与の測定空間において、能動的及び受動的追跡マーカ118を識別することができる任意の好適なカメラ(複数可)を含み得る。例えば、1つ以上の赤外線カメラ(例えば、2焦点カメラ又は実体写真測量用カメラ)などが挙げられる。カメラ200は、所与の測定空間を走査し、マーカ118の位置を3次元で識別し決定するために、マーカ118から得られる光を検出することができる。例えば、能動的マーカ118は、電気信号によって起動される赤外線発光マーカ(例えば、赤外線発光ダイオード(LED))を含み得る。受動的マーカ118は、例えば、追跡カメラ200又は他の適切なデバイス上の照明器によって発せられる赤外光を反射する(例えば、入射IR放射を、入射光の方向へ反射する)、再帰反射性マーカを含み得る。
図1及び図2は、手術室環境において外科手術ロボットシステム100を配置するための、可能性がある構成を示す。例えば、ロボット102は、患者210の近く又は患者210に隣接して配置され得る。図中においてロボット102は、患者210の頭部近くに描かれているが、手術を受けている患者210の領域に応じて、患者210の近くの任意の好適な場所にロボット102は配置され得るということが理解されよう。カメラ200は、ロボットシステム100から分離され、患者210の足元に配置され得る。カメラ200がこの場所にあれば、術野208に対する直接的な視線を得ることが可能である。この場合でも、カメラ200は、術野208に対する視線を得られる任意の好適な位置に配置され得ることが考えられる。図示の構成では、外科医120は、ロボット102の向かい側に位置してもよいが、この場合でもエンドエフェクタ112及びディスプレイ110を操作することが可能である。手術助手126は、エンドエフェクタ112及びディスプレイ110の両方へアクセスできるように、外科医120の向かい側に再び位置付けられ得る。必要に応じて、外科医120及び助手126それぞれの場所を入れ替えることができる。麻酔医122及び看護師又は手術着を着た技術者124の従来の領域は、ロボット102及びカメラ200の置かれた場所によって遮られないままである。
ロボット102の他の構成要素に関して、ディスプレイ110は、外科手術ロボット102に装着することができ、他の例示的な実施形態では、ディスプレイ110は、外科手術ロボット102の存在する外科手術室内、又は遠く離れた場所でのいずれかで外科手術ロボット102から取り外され得る。エンドエフェクタ112は、ロボットアーム104に連結され、少なくとも1つのモータによって制御され得る。例示的な実施形態では、エンドエフェクタ112は、ガイドチューブ114を備えることができるが、そのガイドチューブ114は、患者210に対する手術を行うために使用される外科手術器具608(本明細書で更に説明される)を受容し、配向することができる。本明細書で使用される場合、「エンドエフェクタ」という用語は、「エンドエフェクチュエータ」及び「エフェクチュエータ要素」という用語と互換的に使用される。一般に、エンドエフェクタ112はガイドチューブ114と共に示されるが、エンドエフェクタ112は、外科手術における使用に好適な任意の好適な器具で置き換えられ得ることが理解されよう。いくつかの実施形態では、エンドエフェクタ112は、所望の様式での外科手術器具608の動きを実現するための任意の既知の構造を備えることができる。
外科手術ロボット102は、エンドエフェクタ112の並進及び配向を制御することができる。ロボット102は、例えば、x軸、y軸、及びz軸に沿ってエンドエフェクタ112を移動させることができる。エンドエフェクタ112は、x軸、y軸、及びz軸のうちの1つ以上、並びにZフレーム軸を中心として選択的に回転させるために(エンドエフェクタ112に関連するオイラー角(例えば、ロール、ピッチ、及び/又はヨー)のうちの1つ以上を選択的に制御するように)構成され得る。いくつかの例示的な実施形態では、エンドエフェクタ112の並進及び配向の選択的制御は、例えば、回転軸のみを含む6自由度ロボットアームを利用する従来のロボットと比較して、著しく改善された精度を有する医療手技の実行を可能にすることができる。例えば、外科手術ロボットシステム100は、患者210に対して手術をするために使用され得るが、ロボットアーム104は、患者210の身体の上方に配置され得る。その際に、エンドエフェクタ112は、選択的に患者210の身体に向かって、z軸に対して斜めに角度が付けられている。
いくつかの例示的な実施形態では、外科手術器具608の位置は、外科手術ロボット102が手術中に常に外科手術器具608の場所を認識することができるように、動的に更新され得る。その結果、いくつかの例示的な実施形態では、外科手術ロボット102は、医師からの更なる支援(医師がそれを望まない限り)なしに、外科手術器具608を所望の位置に迅速に移動させることができる。いくつかの更なる実施形態では、外科手術ロボット102は、外科手術器具608が選択され、予め計画された軌道から外れてしまった場合に、外科手術器具608の経路を補正するように構成することができる。いくつかの例示的な実施形態では、外科手術ロボット102は、エンドエフェクタ112及び/又は外科手術器具608の動きの停止、修正、及び/又は手動制御を実行するように構成され得る。このように、例示的な実施形態では、使用中、外科医又は他のユーザは、システム100を動作させることができ、エンドエフェクタ112及び/又は外科手術器具608の自律運動を停止、修正、又は手動制御するという選択肢を有することになる。外科手術ロボット102による外科手術器具608の制御及び動きを含む、外科手術ロボットシステム100の更なる詳細は、同時係属中の米国特許出願第13/924,505号に見出すことができ、その全体が参照により本明細書に組み込まれ得る。
ロボット外科手術システム100は、ロボットアーム104、エンドエフェクタ112、患者210、及び/又は外科手術器具608の動きを3次元で追跡するように構成された、1つ以上の追跡マーカ118を備えることができる。例示的な実施形態では、複数の追跡マーカ118が、ロボット102の外面に取り付けられ(又は別様に固定され)得るが、その場所の例としては、例えば、ロボット102のベース106上、ロボットアーム104上、又はエンドエフェクタ112上が挙げられるが、それらに限定されない。例示的な実施形態では、複数の追跡マーカ118のうちの少なくとも1つの追跡マーカ118を、エンドエフェクタ112に取り付けるか、又は別様に固定することができる。1つ以上の追跡マーカ118は、患者210に更に取り付けられ(又は別様に固定され)得る。例示的な実施形態では、複数の追跡マーカ118は、外科医、外科手術ツール、又はロボット102の他の部分の陰に隠れてしまう可能性を低減するために、術野208から離間した患者210上に配置されることができる。更に、1つ以上の追跡マーカ118を、外科手術ツール608(例えば、ねじ回し、拡張器、インプラント挿入器など)に更に取り付ける(又は別様に固定する)ことができる。したがって、追跡マーカ118により、マークされた物体(例えば、エンドエフェクタ112、患者210、及び外科手術ツール608)の各々がロボット102によって追跡されるのを可能にする。例示的な実施形態では、システム100は、マークされた物体の各々から収集された追跡情報を使用して、例えば、エンドエフェクタ112、外科手術器具608(例えば、エンドエフェクタ112のチューブ114内に配置されたもの)の場所及び配向、並びに患者210の相対位置を、計算することができる。
例示的な実施形態では、マーカ118のうちの1つ以上は、光学マーカであり得る。いくつかの実施形態では、エンドエフェクタ112上での1つ以上の追跡マーカ118の位置決めは、エンドエフェクタ112の位置をチェック又は確認するために役立つので、位置測定の正確さを最大にすることができる。外科手術ロボット102及び外科手術器具608の制御、動き、及び追跡を含む外科手術ロボットシステム100の更なる詳細は、同時係属中の米国特許出願第13/924,505号に見出すことができ、その全体が参照として本明細書に組み込まれる。
例示的な実施形態は、外科手術器具608に連結された1つ以上のマーカ118を含む。例示的な実施形態では、例えば、患者210及び外科手術器具608に連結されたこれらのマーカ118と、ロボット102のエンドエフェクタ112に連結されたマーカ118とは、従来の赤外線発光ダイオード(LED)又はOptotrak(登録商標)ダイオードを含むことができる。これらのダイオードは、Optotrak(登録商標)などの市販の赤外線光学追跡システムを使用して、追跡され得るものである。Optotrak(登録商標)は、Northern Digital Inc.(Waterloo,Ontario,Canada)の登録商標である。他の実施形態では、マーカ118は、Polaris Spectraなどの、市販の光学追跡システムを使用して追跡することができる、従来の反射球体を含むことができる。Polaris Spectraもまた、Northern Digital,Inc.の登録商標である。例示的な一実施形態では、エンドエフェクタ112に連結されたマーカ118は、オン及びオフにすることができる赤外線発光ダイオードを含む能動的マーカであり、患者210及び外科手術器具608に連結されたマーカ118は、受動的反射マーカを含む。
例示的な実施形態では、マーカ118から放出された、及び/又はマーカ118によって反射された光は、カメラ200によって検出され得るが、この光は、マークされた物体の場所及び動きを監視するために使用され得る。代替的な実施形態では、マーカ118は、高周波及び/若しくは電磁波反射器又はトランシーバを備えることができ、カメラ200は、高周波及び/若しくは電磁波トランシーバを含むか、又はそれによって置き換えられ得る。
外科手術ロボットシステム100と同様であるが、図3は、本開示の例示的な一実施形態と一致するドッキング構成の外科手術ロボットシステム300及びカメラスタンド302を示す。外科手術ロボットシステム300は、ディスプレイ304、上部アーム306、下部アーム308、エンドエフェクタ310、垂直柱312、キャスター314、キャビネット316、タブレットドロワー318、コネクタパネル320、制御パネル322、及び情報のリング324を含むロボット301を備え得る。カメラスタンド302は、カメラ326を備え得る。これらの構成要素は、図5に関してより詳しく説明される。図3は、例えば使用されていないときに、カメラスタンド302がロボット301と入れ子になるドッキング構成の外科手術ロボットシステム300を示している。カメラ326及びロボット301が互いに分離され、外科手術中には、例えば図1及び図2に示されるように、任意の適切な場所に配置され得ることが当業者には理解されよう。図4は、本開示の例示的な一実施形態と一致するベース400を示す。ベース400は、外科手術ロボットシステム300の一部であってよく、キャビネット316を備えていてよい。キャビネット316は、外科手術ロボットシステム300の一部特定の構成要素を収容し得るが、それらの要素の例としては、バッテリ402、配電モジュール404、プラットフォームインターフェースボードモジュール406、コンピュータ408、ハンドル412、及びタブレットドロワー414が挙げられるが、これらに限定されない。これらの構成要素間の接続及び関係は、図5に関してより詳細に説明される。
図5は、外科手術ロボットシステム300の例示的な一実施形態の、一部特定の構成要素のブロック図を示す。外科手術ロボットシステム300は、プラットフォームサブシステム502、コンピュータサブシステム504、動き制御サブシステム506、及び追跡サブシステム532を備え得る。プラットフォームサブシステム502は、バッテリ402、配電モジュール404、プラットフォームインターフェースボードモジュール406、及びタブレット充電ステーション534を更に備え得る。コンピュータサブシステム504は、コンピュータ408、ディスプレイ304、及びスピーカ536を更に備え得る。動き制御サブシステム506は、ドライバ回路508、モータ510、512、514、516、518、スタビライザ520、522、524、526、エンドエフェクタ310、及びコントローラ538を更に備え得る。追跡サブシステム532は、位置センサ540及びカメラコンバータ542を更に備え得る。システム300はまた、フットペダル544及びタブレット546をも備え得る。
入力電力は、配電モジュール404に提供され得る電源548を介して、システム300に供給される。配電モジュール404は、入力電力を受信し、システム300の他のモジュール、他の構成要素、及び他のサブシステムに提供される、異なる電源電圧を生成するように構成されている。配電モジュール404は、プラットフォームインターフェースモジュール406に、異なる電圧の電源を提供するように構成され得る。このプラットフォームインターフェースモジュール406に提供された異なる電圧の電源は、他の構成要素、例えば、コンピュータ408、ディスプレイ304、スピーカ536、例えば、電力モータ512、514、516、518や、エンドエフェクタ310に給電するためのドライバ508、モータ510、リング324、カメラコンバータ542、及びシステム300のための他の構成要素、例えば、キャビネット316内で電気部品を冷却するためのファンに提供され得る。
配電モジュール404はまた、タブレットドロワー318内に配置され得るタブレット充電ステーション534などの、他の構成要素に電力を提供し得る。タブレット充電ステーション534は、タブレット546を充電するためにタブレット546と無線又は有線で通信することができる。タブレット546は、本開示と一致し、本明細書に記載されるように、外科医によって使用され得る。配電モジュール404はまた、バッテリ402に接続され得るが、このバッテリ402は、万一、配電モジュール404が入力電力548から電力を受信しない場合に、一時的な電源として機能するものである。他の状況時には、配電モジュール404は、必要に応じてバッテリ402を充電するのに役立ち得る。
プラットフォームサブシステム502の他の構成要素としては、コネクタパネル320、制御パネル322、及びリング324も挙げられ得る。コネクタパネル320は、異なるデバイス及び構成要素を、システム300並びに/又は関連付けられた構成要素及びモジュールに接続するのに役立ち得る。コネクタパネル320は、異なる構成要素からの配線又は接続を受け取る、1つ以上のポートを含み得る。例えば、コネクタパネル320は、システム300を他の機器に接地することができる接地端子ポートと、フットペダル544をシステム300に接続するためのポートと、追跡サブシステム532に接続するポートとを有し得る。追跡サブシステム532は、位置センサ540と、カメラコンバータ542と、カメラスタンド302に関連付けられたカメラ326とを含み得る。コネクタパネル320はまた、コンピュータ408などの他の構成要素への、USB通信、イーサネット(登録商標)通信、HDMI(登録商標)通信を可能にする他のポートを含み得る。
制御パネル322は、様々なボタン又はインジケータを提供し得るが、これらのボタン又はインジケータは、システム300の動作を制御するか、かつ/又はシステム300に関する情報を提供するものである。例えば、制御パネル322は、システム300を電源オン又はオフにするためのボタン、垂直柱312を上げ下げするためのボタン、スタビライザ520~526を上げ下げするためのボタンを更に含み得るが、このスタビライザ520~526を上げ下げするためのボタンは、キャスター314に係合して、キャスター314が物理的に移動しないようにシステム300をロックするように設計され得る。他のボタンは、緊急時にシステム300を停止することができるものである。この緊急時の停止では、すべてのモータへの電力供給が停止され、機械的ブレーキを適用して、すべての動きが発生しないようにすることができる。制御パネル322はまた、各配線の電力を示すもの又はバッテリ402の充電状態を示すものなど、一部特定のシステム状態をユーザに通知する、インジケータをも有し得る。
リング324は、システム300のユーザに、システム300が現在動作している異なるモードを通知し、特定の警告をユーザに通知するための、視覚的インジケータであり得る。
コンピュータサブシステム504は、コンピュータ408、ディスプレイ304、及びスピーカ536を含む。コンピュータ504は、システム300を動作させるためのオペレーティングシステム及びソフトウェアを含む。コンピュータ504は、情報をユーザに表示するために、他の構成要素(例えば、追跡サブシステム532、プラットフォームサブシステム502、及び/又は動き制御サブシステム506)から情報を受信及び処理し得る。更に、コンピュータサブシステム504はまた、ユーザに音声を提供するためのスピーカ536をも含み得る。
追跡サブシステム532は、位置センサ504及びコンバータ542を含み得る。追跡サブシステム532は、図3に関して説明したような、カメラ326を含むカメラスタンド302に対応し得る。位置センサ504は、カメラ326であり得る。追跡サブシステムは、システム300の異なる構成要素上に、及び/又は外科手術中にユーザによって使用される器具上に位置する特定のマーカの場所を、追跡し得る。この追跡は、それぞれLED又は反射マーカなどの能動的又は受動的要素の場所を追跡する、赤外線技術の使用を含む、本開示と一致するやり方で行われ得る。これらのタイプのマーカを有する構造の場所、配向、及び位置が、コンピュータ408に提供され、ディスプレイ304上でユーザに示され得る。例えば、これらのタイプのマーカを有し、上記の様式で追跡される外科手術器具608(ナビゲーションスペースと称され得る)は、患者の解剖学的構造の3次元画像に関連してユーザに示され得る。動き制御サブシステム506は、垂直柱312、上部アーム306、下部アーム308を物理的に移動させるか、又はエンドエフェクタ310を回転させるように構成され得る。物理的な動作は、1つ以上のモータ510~518の使用を通して行われ得る。例えば、モータ510は、垂直柱312を垂直に上下させるように構成され得る。モータ512は、図3に示されるように、垂直柱312との係合点の周りで上部アーム308を横方向に移動させるように構成され得る。モータ514は、図3に示されるように、上部アーム308との係合点の周りで下部アーム308を横方向に移動させるように構成され得る。モータ516及び518は、一方がロールを制御し、一方がティルトを制御することができ、それによってエンドエフェクタ310が動かされ得る多くの角度を提供するようなやり方で、エンドエフェクタ310を動かすように構成され得る。これらの動作は、コントローラ538によって実現され得るが、このコントローラ538は、エンドエフェクタ310上に配設され、所望のやり方でシステム300を動かすようにこれらのロードセルを動作させるユーザによって作動されるロードセルを介してこれらの動きを制御し得る。
更に、システム300は、ディスプレイ304(タッチスクリーン入力デバイスであり得る)上の患者の解剖学的構造の3次元画像上に、ユーザが、外科手術器具又は構成要素の場所をディスプレイ304上で示すことを通じて、垂直柱312、上部アーム306、及び下部アーム308の自動的動作を提供し得る。ユーザは、フットペダル544を踏むことによって、又は何らかの他の入力手段を用いて、この自動的動作を開始することができる。
図6は、例示的な一実施形態と一致する、外科手術ロボットシステム600を示す。外科手術ロボットシステム600は、エンドエフェクタ602、ロボットアーム604、ガイドチューブ606、器具608、及びロボットベース610を備え得る。器具ツール608は、1つ以上の追跡マーカ(例えばマーカ118など)を含む追跡アレイ612に装着することができ、関連する軌道614を有し得る。軌道614は、ひとたび器具ツール608が、ガイドチューブ606を通して位置決めされるか又はその中で固定された場合に、その器具ツール608が移動するように構成されている動作の経路、例えば、患者への器具ツール608の挿入経路を表し得る。例示的な一操作では、ロボットベース610は、患者210に手術を行う際にユーザ(例えば、外科医)を、外科手術ロボットシステム600が支援することができるように、ロボットアーム604及びエンドエフェクタ602と電子通信するように構成され得る。外科手術ロボットシステム600は、前述の外科手術ロボットシステム100及び300と一致し得る。
追跡アレイ612は、器具ツール608の場所及び配向を監視するために、器具ツール608に取り付けられ得る。追跡アレイ612は、器具ツール608に装着されてもよく、かつ追跡マーカ804を備えてもよい。図8に最も良好に示されているように、追跡マーカ804は、例えば、発光ダイオード及び/又は他のタイプの反射マーカ(例えば、本明細書の他の場所で説明されるようなマーカ118)であり得る。追跡デバイスは、外科手術ロボットシステムに関連付けられた、1つ以上の視線デバイスであり得る。一例として、追跡デバイスは、外科手術ロボットシステム100、300に関連付けられた1つ以上のカメラ200、326であってもよく、かつ定義されたドメインに対して、又はロボットアーム604、ロボットベース610、エンドエフェクタ602、及び/若しくは患者210に対する器具608の相対的な配向を得るために、追跡アレイ612を追跡してもよい。追跡デバイスは、カメラスタンド302及び追跡サブシステム532に関連して説明される構造と一致し得る。
図7A、図7B、及び図7Cは、例示的な一実施形態と一致するエンドエフェクタ602のそれぞれ上面図、正面図、及び側面図を示す。エンドエフェクタ602は、1つ以上の追跡マーカ702を備え得る。追跡マーカ702は、発光ダイオード、又は前述の追跡マーカ118などの他のタイプの能動的及び受動的なマーカであり得る。例示的な一実施形態では、追跡マーカ702は、電気信号によって活性化される能動的赤外線発光マーカ(例えば、赤外線発光ダイオード(LED))である。したがって、追跡マーカ702は、赤外線マーカ702がカメラ200、326に視認されるように起動され、又は赤外線マーカ702がカメラ200、326に視認されないように機能停止され得る。したがって、マーカ702が起動状態であるときには、エンドエフェクタ602は、システム100、300、600によって制御され得る。また、マーカ702が機能停止状態であるときには、エンドエフェクタ602は、所定の位置にロックされ、システム100、300、600がエンドエフェクタ602を移動することができないようになっている。
マーカ702は、外科手術ロボットシステム100、300、600に関連付けられた1つ以上のカメラ200、326又は他の追跡デバイスによってマーカ702が視認可能であるようなやり方で、エンドエフェクタ602上又はその内部に配設され得る。カメラ200、326又は他の追跡デバイスは、エンドエフェクタ602が異なる位置及び視野角に移動するにつれて、追跡マーカ702の移動を辿ることによって、エンドエフェクタ602を追跡することができる。マーカ702及び/又はエンドエフェクタ602の場所は、外科手術ロボットシステム100、300、600と関連付けられたディスプレイ110、304上、例えば、図2に示されるようなディスプレイ110及び/又は図3に示されるディスプレイ304上に示され得る。このディスプレイ110、304により、ユーザは、エンドエフェクタ602を、ロボットアーム604、ロボットベース610、患者210、及び/又はユーザに対して望ましい位置に配置することを確実なものにし得る。
例えば、図7Aに示されるように、マーカ702は、エンドエフェクタ602の表面の周りに配置され得るが、それによって、術野208から離れて配置され、ロボット102、301及びカメラ200、326の方を向いている追跡デバイスが、追跡デバイス100、300、600に対するエンドエフェクタ602の一般的な配向の範囲の至る所で、マーカ702のうちの少なくとも3つを見ることができるようになっている。例えば、このようにマーカ702の分布させることにより、エンドエフェクタ602が術野208内で並進され、回転されるときに、追跡デバイスがエンドエフェクタ602を監視することが可能になる。
加えて、例示的な一実施形態では、エンドエフェクタ602は、いつ外部カメラ200、326がマーカ702を読み取る準備が整ったのかを検出することができる赤外線(IR)受信機を備え得る。この検出時に、エンドエフェクタ602は、マーカ702を発光させてもよい。外部カメラ200、326がマーカ702を読み取る準備ができているということをIR受信機が検出すると、発光ダイオードであり得るマーカ702のデューティサイクルを同期させる必要があるということを、外部カメラ200、326に信号伝達してもよい。これはまた、ロボットシステムが全体として消費する電力をより少なくすることを可能にし得るが、それによって、マーカ702は、連続的に発光する代わりに、適切なときにのみ照明されるようになるであろう。更に、例示的な一実施形態では、マーカ702は、異なるタイプの外科手術器具608などの他のナビゲーションツールとの干渉を防止するために、その電源をオフにされ得る。
図8は、追跡アレイ612及び追跡マーカ804を含む、1つのタイプの外科手術器具608を示す。追跡マーカ804は、本明細書に記載の任意のタイプのものであり得る。その例としては、発光ダイオード又は反射球体が挙げられるが、それらに限定されない。マーカ804は、外科手術ロボットシステム100、300、600に関連付けられ、視線カメラ200、326のうちの1つ以上であり得る追跡デバイスによって監視され得る。カメラ200、326は、追跡アレイ612及びマーカ804の位置及び配向に基づいて、器具608の場所を追跡することができる。外科医120などのユーザは、追跡アレイ612及びマーカ804が追跡デバイス又はカメラ200、326によって十分に認識されるようなやり方で器具608を配向させて、例えば、例示的な外科手術ロボットシステムのディスプレイ110上に、器具608及びマーカ804を表示させ得る。
外科医120が器具608を、エンドエフェクタ602のガイドチューブ606内に配置し、器具608を調整し得るやり方は、図8で明らかである。エンドエフェクタ112、310、602の中空チューブ又はガイドチューブ114、606は、外科手術器具608の少なくとも一部分を受容するようなサイズであり、かつそのように構成されている。ガイドチューブ114、606は、外科手術器具608の挿入及び軌道が、患者210の身体体内又は身体上の所望の解剖学的標的に到達することができるように、ロボットアーム104によって配向されるように構成されている。外科手術器具608は、略円筒形の器具の少なくとも一部分を含み得る。外科手術ツール608の例としてねじ回しが示されているが、任意の適切な外科手術ツール608がエンドエフェクタ602によって位置決めされ得ることが理解されよう。例として、外科手術器具608は、ガイドワイヤ、カニューレ、リトラクタ、ドリル、リーマ、ねじ回し、挿入ツール、取り外しツールなどのうちの1つ以上を含み得る。中空チューブ114、606は、一般的に、円筒形構成を有するものとして示されるが、ガイドチューブ114、606は、外科手術器具608を収容し、手術部位にアクセスするように所望される任意の好適な形状、サイズ、及び構成を有し得ることが当業者には理解されよう。
図9A~図9Cは、例示的な一実施形態と一致するエンドエフェクタ602と、ロボットアーム604の一部とを示す。エンドエフェクタ602は、本体1202及びクランプ1204を更に備え得る。クランプ1204は、ハンドル1206、ボール1208、バネ1210、及びリップ1212を備え得る。ロボットアーム604は、凹部1214、取り付けプレート1216、リップ1218、及び磁石1220を更に備え得る。
エンドエフェクタ602は、1つ以上のカップリングを介して、外科手術ロボットシステム及びロボットアーム604と機械的に作用及び/又は係合することができる。例えば、エンドエフェクタ602は、位置特定カップリング及び/又は補強カップリングを介して、ロボットアーム604と係合することができる。これらのカップリングを通して、エンドエフェクタ602は、可撓性及び無菌バリアの外側のロボットアーム604に締結され得る。例示的な一実施形態では、位置特定カップリングは磁気運動学的マウントであってもよく、補強カップリングは、オーバーセンター式5節クランプリンク機構であってもよい。
位置特定カップリングに関して、ロボットアーム604は、取り付けプレート1216(非磁性材料であり得る)、1つ以上の凹部1214、リップ1218、及び磁石1220を備え得る。磁石1220は、凹部1214のそれぞれの下方に取り付けられている。クランプ1204の部分は、磁性材料を含んでいてよく、1つ以上の磁石1220によって引き付けられてもよい。クランプ1204及びロボットアーム604の磁気引力により、ボール1208は、それぞれの凹部1214に着座する。例えば、図9Bに示されるようなボール1208が、図9Aに示されるような凹部1214に着座する。この着座は、磁気支援式の運動学的カップリングと見なすことができる。磁石1220は、エンドエフェクタ602の配向に関係なく、エンドエフェクタ602の全重量を支持するのに十分に強力であるように構成され得る。位置特定カップリングは、6つの自由度を一意に抑制する任意のスタイルの運動学的マウントであり得る。
補強カップリングに関して、クランプ1204の部分は、固定接地リンクであるように構成され得るが、それによりクランプ1204は、5節リンク機構として機能し得る。クランプハンドル1206を閉じることで、リップ1212及びリップ1218が、エンドエフェクタ602及びロボットアーム604を固定するようなやり方でクランプ1204と係合するため、エンドエフェクタ602はロボットアーム604に締結され得る。クランプハンドル1206が閉じられると、バネ1210は、クランプ1204がロック位置にある間、伸張され又は応力を受け得る。ロック位置は、リンク機構に中心を通過させる位置であり得る。閉位置で中心を通過しているので、リンク機構は、クランプ1204を解放するために、クランプハンドル1206に加えられる力がなければ、開放されない。したがって、ロック位置では、エンドエフェクタ602はロボットアーム604にしっかりと固定され得る。
バネ1210は、張力のかかった湾曲したビームであり得る。バネ1210は、未使用のPEEK(ポリエーテル-エーテル-ケトン)などの高い剛性及び高い降伏ひずみを示す材料から構成され得る。エンドエフェクタ602とロボットアーム604との間のリンク機構は、2つのカップリングの締結を妨げることなく、エンドエフェクタ602とロボットアーム604との間に無菌のバリアを提供することができる。
補強カップリングは、複数のバネ部材を有するリンク機構であり得る。補強カップリングは、カムベースの機構又は摩擦ベースの機構でラッチ留めすることができる。補強カップリングはまた、エンドエフェクタ102をロボットアーム604に締結することをサポートするのに十分強力な電磁石であり得る。補強カップリングは、エンドエフェクタ602及び/又はロボットアーム604のいずれかとは完全に別体の、多ピースカラーであり得るが、このカラーは、エンドエフェクタ602とロボットアーム604との間の界面上で滑動し、ねじ機構、オーバーセンター式リンク機構、又はカム機構で締まるものである。
図10及び図11を参照すると、外科手術の前又はその最中に、物体及び患者210の標的化された解剖学的構造を、ナビゲーション空間及び画像空間の両方で追跡するために、特定の登録手順が実行され得る。そのような登録を実行するために、図10に示すような登録システム1400を使用することができる。
患者210の位置を追跡するために、患者追跡デバイス116は、患者210の剛性のある解剖学的構造に固定される、患者固定器具1402を含んでいてよく、動的参照ベース(DRB)1404は、患者固定器具1402にしっかりと装着され得る。例えば、患者固定器具1402は、動的参照ベース1404の開口部1406に挿入され得る。動的参照ベース1404は、追跡サブシステム532などの追跡デバイスに視認可能なマーカ1408を含むことができる。これらのマーカ1408は、本明細書で先に論じたように、追跡マーカ118などの光学マーカ又は反射球体であり得る。
患者固定器具1402は、患者210の剛性を有する解剖学的構造に装着されるが、これは外科手術中ずっと取り付けられたままであってよい。例示的な一実施形態では、患者固定器具1402は、患者210の剛性領域、例えば、外科手術を受ける標的化された解剖学的構造から遠く離れて位置する骨に装着される。標的となる解剖学的構造を追跡するために、動的参照ベース1404は、標的化された解剖学的構造の上又は近くに一時的に配置される登録固定具を用いて、標的化された解剖学的構造に関連付けられ、動的参照ベース1404を、標的化された解剖学的構造の場所に登録する。
登録固定具1410は、枢動アーム1412を用いて、患者固定器具1402に装着される。枢動アーム1412は、登録固定具1410の開口部1414を通して患者固定器具1402を挿入することによって、患者固定器具1402に装着される。枢動アーム1412は、例えば、枢動アーム1412の開口部1418を通してノブ1416を挿入することによって、登録固定具1410に装着される。
枢動アーム1412を使用して、登録固定具1410が、標的化された解剖学的構造の上方に配置され得るが、その場所は、登録固定具1410上の追跡マーカ1420及び/又は基準1422を使用して、画像空間及びナビゲーション空間内で決定され得る。登録固定具1410は、ナビゲーション空間内で視認可能なマーカ1420(例えば、マーカ1420が追跡サブシステム532によって検出可能であり得る)の集合を含み得る。追跡マーカ1420は、本明細書で先に説明したように、赤外光で視認可能な光学マーカであり得る。登録固定具1410はまた、撮像空間(例えば、3次元CT画像)内で視認される、例えば、軸受ボールなどの基準1422の集合体をも含み得る。図11に関してより詳細に説明されるように、登録固定具1410を使用して、標的化された解剖学的構造を、動的参照ベース1404に関連付けることができ、それによって、ナビゲーション空間内の物体を描いたものを、解剖学的構造の画像上に重ね合わせることが可能になる。標的化された解剖学的構造から離れた位置に配置された動的参照ベース1404は、外科手術領域からの登録固定具1410及び/又は枢動アーム1412の除去を可能にする基準点となり得る。
図11は、本開示と一致する登録のための例示的な方法1500を提供する。方法1500は、ステップ1502で始まる。そのステップ1502では、標的化された解剖学的構造のグラフィック表現(又は画像(複数可))が、システム100、300、600、例えばコンピュータ408にインポートされ得る。グラフィック表現は、登録固定具1410と基準1420の検出可能な撮像パターンとを含む、患者210の標的化された解剖学的構造の3次元CT又はX線蛍光透視スキャンであり得る。
ステップ1504では、基準1420の撮像パターンが検出され、撮像空間において登録され、コンピュータ408に記憶される。任意選択的に、ステップ1506の時点では、登録固定具1410のグラフィック表現を、標的化された解剖学的構造の画像上に重ね合わせることができる。
ステップ1508では、マーカ1420を認識することによって、登録固定具1410のナビゲーションパターンが検出され、登録される。マーカ1420は、位置センサ540を介し、追跡サブシステム532によって、赤外線光によりナビゲーション空間内で認識される光学マーカであり得る。したがって、標的化された解剖学的構造の場所、配向、及び他の情報は、ナビゲーション空間に登録される。したがって、登録固定具1410は、基準1422の使用によってナビゲーション空間内、マーカ1420の使用によって画像空間内の両方で認識され得る。ステップ1510では、画像空間内の登録固定具1410の登録が、ナビゲーション空間に転送される。この転送は、例えば、マーカ1420のナビゲーションパターンの位置と比較して、基準1422の撮像パターンの相対位置を使用することによって行われる。
ステップ1512では、(画像空間に登録された)登録固定具1410のナビゲーション空間の登録が、患者固定器具1402に装着された動的登録アレイ1404のナビゲーション空間に更に転送される。こうして、登録固定具1410を取り外すことができ、ナビゲーション空間が画像空間に関連付けられているため、動的参照ベース1404を使用して、ナビゲーション空間及び画像空間の両方で、標的化された解剖学的構造を追跡することができる。
ステップ1514及び1516では、ナビゲーション空間が、画像空間及びナビゲーション空間において視認可能なマーカを有するオブジェクト(例えば、光学マーカ804を有する外科手術器具608)上に、重ね合わされ得る。物体は、標的化された解剖学的構造の画像上の、外科手術器具608のグラフィック表現を通して追跡され得る。
図12A~図12Bは、患者210の、術前、術中、術後、及び/又はリアルタイム画像データを取得するために、ロボットシステム100、300、600と併せて使用され得る撮像デバイス1304を示す。任意の適切な対象を、撮像システム1304を使用して、任意の適切な手術に対して撮像することができる。撮像システム1304は、例えば撮像デバイス1306及び/又はCアーム1308デバイスなどの任意の撮像デバイスであり得る。X線システムでは、患者210を頻繁に手動で位置決めし直すことが必要とされ得るが、そのようなことを必要とせずに、多数の異なる位置から患者210のX線を撮影することが望ましい場合があり得る。図12Aに示すように、撮像システム1304は、「C」形状の互いに対向する遠位端1312で終端する細長いC字形部材を含むCアーム1308の形態であり得る。C字形部材1130は、X線源1314及び画像受容体1316を更に備え得る。アームのCアーム1308内の空間は、医師が、X線支持構造1318からの干渉を実質的に受けずに、患者に付き添うための余地を提供し得る。図12Bに示すように、撮像システムは、図示されていない画像キャプチャ部を取り囲み得る、撮像装置支持構造1328(例えば車輪1332を備えた車輪付き移動カート1330など)に装着されたガントリハウジング1324を有する撮像デバイス1306を含み得る。画像キャプチャ部は、X線源及び/又は発光部と、X線受信部及び/又は画像受信部とを含み得る。これらは、互いに約180度の位置に配設され、画像キャプチャ部の軌道に関連するロータ(図示せず)上に取り付けられ得る。画像キャプチャ部は、画像取得中に、360度回転するように動作可能であり得る。画像キャプチャ部は、中心点及び/又は中心軸線の周りを回転し得るが、それにより患者210の画像データを、複数の方向又は複数の平面から取得することを可能にする。ある特定の撮像システム1304が本明細書には例示されるが、任意の好適な撮像システムが、当業者によって選択され得るということが理解されよう。
ここで本開示の図13を参照する。図13は、外科手術中の、先端部1602を有する外科手術ツール1600と、患者の標的とする骨であり得る骨1604とを示す。また同図には、例えば、外科医が患者の骨に穴をドリルで開ける医療手技中に、骨1604に貫入される際にツール1600に関連付けられる、3つの力(Finsertion、FP、及びFN)も図示されている。外科手術ツール1600は、外科的用途に関連する任意の外科手術器具又はツールであり得る。その例としては、ドリル、突き錐、タップ、ねじ回し、又は他のタイプの外科手術ツールが挙げられるが、これらに限定されない。上記の力は、骨に貫入させることを意図した力がツールに加えられる際の、ツールと骨との間の界面に発生する反力と称され得る。挿入力(Finsertion)は、表面に垂直な成分力(FN)と、表面に平行な成分力(FP)とに分解され得る。
器具1600の先端1602は、骨1604の表面に配設され、その表面に保たれているが、前述の力に起因する物理的メカニズムは、以下のものを含む:(1)骨1604は、ひとまとめで挿入力(Finsertion)から離れるように移動し得る、(2)先端1602の滑りを防止する摩擦抵抗を圧倒し、先端1602がFPの方向、すなわち骨表面1604に平行な方向に、横に移動することを結果としてもたらし得る、又は(3)先端部が、Finsertionなどの意図された方向で骨に貫入され得る。
本開示は、所望の場所に器具1600を位置揃えさせ、骨1604の表面に平行な力(FP)のために、先端部1602が横にそれる、又は「表面を削ぐ(スカイビングする)」のを防止することを目的とする。器具1600は、堅固に保持されたガイドチューブであって、その内径とツールの外径との間に精密公差を有するガイドチューブを通して動作させることができる。このようなガイドチューブは、本明細書内で、既に説明されている。ガイドチューブが器具1600又は別のハードウェアを骨1604へと駆動させる上でこれを完全に有効であるようにするためには、チューブは骨1604に対して移動するべきではなく、器具1600又は他のハードウェアは、チューブ又は骨1604に対して屈曲するべきではない。
本明細書で先に説明したように、床に堅固にロックされることができる外科手術ロボットは、ガイドチューブを静止し、しっかりとした位置(例えば、ロボットシステム300)に維持するのに効果的であり得る。スカイビングは、ロボット支援外科手術の文脈においては、複数のシナリオをもたらし得る。例えば、ガイドチューブを通して、ある角度で器具1600を挿入し、骨1604と接触させるまでの間に、骨1604の表面に平行に生成される力は、器具挿入力及び挿入角度に少なくとも部分的に又は全面的に依存し得るが、そのような力は、器具が屈曲すること及び/又は患者が動いてしまうことにつながり得る。
別の例として、器具1600を、骨1604に対してある角度で、又は骨1604に対して垂直のいずれかでガイドチューブを通して挿入することにより、器具1600がガイドチューブ内に完全に入ってしまうか、又は器具1600のハンドルが底に着いてしまう深さ又は点に器具1600が到達する(すなわち、器具1600のハンドルが、ガイドチューブの上部入口に完全に当接している、すなわち、その時点では、チューブが長手方向に前進されない限り、ツールが最早それ以上は挿入され得ない)という結果となり得る。外科医が、器具1600が底に着いた後に更に追加の下向きの力を加えるという場合には、その力は、ガイドチューブによって吸収される。骨1604の更なる嵌入のために、この力が器具1600に伝達されるということはない。この例は、いくつかの意図しない結果をもたらし得る。1つの意図しない結果は、器具1600が底に着いていることを外科医が認識しない場合に、ねじ又はタップが前方に移動することができないにもかかわらず、ねじ回し又はタップを回転させることによって、追加的な力によって患者骨のねじ穴が損傷してしまう又はねじ山を剥ぎ取ってしまい得るということであり得る。別の意図しない結果は、外科医が、外科医が前進させようと試みている器具又はツールが、所望のとおりの又は期待したような貫入を達成しないということであり得る。
前述のように、ロボットシステム300は、エンドエフェクタ310上に配設されたロードセル(ロボットアームの多軸運動を制御する)を含み得る。ガイドチューブ及び/又はエンドエフェクタに取り付けられた多軸ロードセルを使用して、上述した横方向の偏向力/トルクと、長手方向の底を突く力/トルクを、外科手術中にリアルタイムで定量化することができる。本開示と一致したロボットシステム300は、ロボットのガイドチューブ上の多軸ロードセルによって監視される力及びモーメントを使用して、外科医に具体的なフィードバックを提供して、器具又はツールが不正確に、不完全に、又は不十分に挿入されるのを防止する助けとすることができる。
図14は、本開示と一致するロボットアーム1700の例示的な一実施形態を示す。ロボットアーム1700は、エンドエフェクタ1702、ガイドチューブ1704、及びエンドエフェクタ1702に取り付けられたブレスレット1706を含み得る。ブレスレット1706は、1つ以上の多軸ロードセル1708を更に含み得る。
ブレスレット1706を介してエンドエフェクタ1702に取り付けられた多軸ロードセル1708は、ガイドチューブの軸線(例えば、ガイドチューブ1704の長手方向軸線)に沿った、その軸線の周りの、そしてその軸線を横切ったトルク及び力の測定を提供することが可能であり得る。多軸ロードセル1708は、無視できる量だけ弾性変形しながら力及びトルクを正確に測定することができるように、適切に配向された剛性内部部材を横切って適用されるひずみゲージを含み得る。
多軸ロードセル1708は、ガイドチューブ1704に印加される力及びモーメントがロードセル1708のうちの1つ以上によって検出され得るように、エンドエフェクタ1702及びガイドチューブ1704を支持することができる。図14に示すように、1つ以上のロードセル1708によって感知された力及びモーメントの方向は、X、Y、及びZとラベル付けされた矢印並びに矢印Mx、My、及びMzで示されている。
外科医が、ガイドチューブ1704を通して器具1600(例えば、ドリル)を挿入し、器具1600を平坦な表面に垂直な位置で骨1604に貫入させる場合、外科医によって加えられる力の大部分は、ドリルビットの軸線を下る長手方向の力として、ドリルに伝達され得る。横方向の力(図14に示すX方向又はY方向の力)又はガイドチューブの軸線を横切るトルク(図14に示すトルクMx又はMy)は比較的小さいと予想され、ガイドチューブ1704に加えられる長手方向の力(例えば、図14に示されるZ方向の力)は、比較的小さいと予想される場合があり得る。
最後の例を続けると、ツールは、ガイドチューブ1704内で自由に回転するはずであるので、外科医がツールにトルクを加えると、そのトルクのうちの比較的小さな部分(図14のMzとして示される)が、ロードセルに伝達されるはずである。外科医は、適用された力を正しく位置揃えできない場合もあり得るが、その場合には、堅固に保持されたガイドチューブ1704が、ツールの横方向への移動を防ぐように作用し得る。この横方向の力は、適度な横方向(X方向、Y方向、又は組み合わせたXY方向)の力として、多軸ロードセル1708のうちの1つ以上によって監視され得る。
先端部1602をスカイビングさせるような急な角度で、器具1600(例えば、ドリル又はツール)が骨1604に衝突するという条件の下で器具1600が挿入されるという場合には、1つ以上の多軸ロードセル1708によって検出された力は、ある特定の予測可能な様式で変化し得る。例えば、ガイドチューブ1704を横切るモーメント(図14に示すMx又はMy)は増加し、ガイドチューブ1704に対して横方向の力(図14のX方向又はY方向の力)は増加し得る。この増加したモーメントのX-Y配向は、図13に示される骨1604の傾斜面の方向に対して垂直であり得る。同様に、力の向きは、図13に示される骨1604の下向きの傾斜面の方向となり、増加したモーメントに対して垂直となるであろう。器具1600をガイドチューブ1704の側面に対して押し付け、わずかに屈曲させる横方向の力により、ガイドチューブ1704の下向き(図14に示されるZ方向)の力がわずかに増加することが予想され得る。この例では、顕著な増加値は、この曲げモーメント及び横方向の力において見られるはずであるということであり得る。
別の例では、器具1600(例えば、ドリル又はツール)がガイドチューブ1704内で底に着く場合には、外科医が追加の下向きの力を加える際に、いかなる他の検出されたモーメント又は力の実質的な増加を伴わずに、ガイドチューブ1704の方向(図14に示されるZ方向)における長手方向下向きの力が突然急上昇することが予想され得る。更に、外科医が器具1600を解放しようとすると、器具1600はガイドチューブ1704と依然として相互作用し得るため、いくらかの残留する下向きの力(Z)が予想され得る。例えば、外科医がロッキング可能ねじ回しを使用してねじを挿入させているが、ねじ回しが底を打ったという場合には、ねじ回しを解放した後、ガイドチューブの頂部に対する張力下にあるねじ回しのハンドルが、下向きの力を残留させるであろう。
ソフトウェアを介してロボットシステムは、力及びモーメントを連続的に監視し、各力及びモーメントが通常の期待される範囲又は閾値内に残っているかどうかをチェックし得る。上記の予想される、望ましくない条件を満たす力/モーメントのパターンに出くわしたときに、ソフトウェアはメッセージを発することで反応することができる。メッセージの例としては、「注意!ツールのスカイビングが発生している場合があります」又は「注意!ツールはその深さ限界に達している場合があります」というものが挙げられ得る。
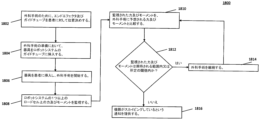
図15は、外科手術中に器具のスカイビングの存在を検出するための、例示的な方法1800を示している。方法1800は、ステップ1802で始まり、ここでは、本明細書で先に論じたように、エンドエフェクタ及びガイドは、外科手術を受けている患者に対して、ある場所に自動的又は手動で配置され得る。ステップ1804では、器具又はツール(例えば、器具1600)が、ロボットシステムのガイドチューブ内に挿入され得る。ステップ1806では、器具を患者に挿入し前進させて、外科手術のために患者の標的とする骨に接触させることができる。例えば、前述のように、椎弓根スクリュー用のねじ穴を開けるために、器具を前進させて、標的とする骨に接触させることができる。ステップ1808では、ロボットシステムは、例えば、エンドエフェクタ上に配設されたロードセルであって、ロボットシステム上に存在する1つ以上のロードセルによって測定された力及びモーメントを、監視することができる。ステップ1810では、監視された力及びモーメントが、外科手術と整合するであろう、予想される力及びモーメントと比較され得る。ステップ1812では、監視された力及びモーメントが予想される範囲又は所定の閾値内にある場合には、外科手術がステップ1814で継続され、方法1800は、前述のようにステップ1810に続く。監視された力及びモーメントが予想される範囲又は所定の閾値内に入っていない場合には、アラート又は通知が、スカイビングの存在を示すために、ロボットシステムによって提供される。
別の実施形態では、生じるスカイビングのミリメートル数を定量化するための方法及び発生する任意のスカイビングを克服するための方法が提供される。
上述のように、ロボットアームに取り付けられた6軸ロードセルは、ガイドチューブに対し横方向に配向された力を検出するように構成されている。最適な手術では、ガイドチューブに加えられる横方向の力は、一般に最小限であるべきである。一実施形態で検出及び加えられる主な力は、ガイドチューブの軸線に沿っているはずである。横方向の力が発生する実施形態では、これらの力は、外科手術器具を骨に貫入させることのない、骨表面に沿った外科手術器具のスカイビング又は移動を引き起こすか、あるいは、これらの力は、過剰な横方向のスカイビング又は外科手術器具から離れる方向への骨の移動を引き起こす可能性がある。いくつかの実施形態では、横方向の力は、ツールの先端を屈曲させ、外科手術器具シャフト及びガイドチューブの中心軸線から横方向に離れるように偏向させることができる。
一部特定の実施形態では、ロボットアームは、ガイドチューブを、横方向の力の存在下でさえ、不動の位置に保持することができる。横方向の力が骨を押し、剛性を有するガイドチューブから骨を離すにつれて、一実施形態では、発生する骨の移動量は、患者に装着されたDRB(動的参照ベース)を用いて追跡され得る。DRBは、反射球体などの追跡マーカのアレイを備え、その追跡マーカの位置は、Polaris Spectra光学追跡システム(Northern Digital,Inc.製)などの追跡システムを用いて追跡される。骨の移動量は監視されるので、どんなずれが起こっても、それはシステムによってユーザに報告され得る。ガイドチューブ位置は自動的にロボットによって調整されるが、その調整は、横方向の力によって引き起こされる追加的移動を相殺することができる。
ここで図16を参照する。いくつかの実施形態では、横方向の力の結果として、器具の先端が器具の追跡アレイに対して屈曲する場合には、その追跡アレイに対する器具の偏向量が測定され得る。一実施形態では、ひずみゲージを使用して、横方向の力によって引き起こされる器具の先端の偏向を測定することができる。ひずみゲージは、典型的には抵抗ベースのものであり、表面の長さのわずかな増加又は減少を検出するように構成されている。一実施形態では、器具の軸線に沿って平行に配向され、シャフトの互いに反対側にある器具の表面に装着された一対のひずみゲージは、いずれかのひずみゲージに向かう又は離れる方向への偏向を測定することができる。別の一実施形態では、3つ以上のゲージは、所与の長手方向位置で器具の外周の周りに平行に取り付けられ、ひずみゲージが装着されている場所において、器具の外周周りで、長手方向の短縮又は伸張の大きさの推定値を提供するように構成され得る。
図16は、矢印によって示される横方向の力に起因する、器具2000の横方向の偏向を誇張して示す。器具2000の、互いに対向する側面に取り付けられたひずみゲージ2002は、力が測定される側の器具2000の伸張を測定し、力とは反対側の器具2000の短縮を測定する。器具2000又はガイドチューブが偏向される場合には、シャフトが偏向されて向かう側は、その長さが減少し、シャフトの上記とは反対側はその長さが増加する。器具又はガイドチューブのシャフトを構成するシリンダの偏向は、加えられた横方向の力に応じて以下の式を利用する:偏向=FL3/3EI(ただし式中、Fは、先端部に印加された横方向の力であり、Lは、先端から支点までの長さ(なお、片持ち式であると想定)であり、Eは、例えばコバルトクロム又はステンレススチールなどの、シャフト材料の弾性率であり、Iは、慣性モーメントであり、これは、ツールの断面に関連する幾何学的特性である)。一実施形態では、器具がシリンダとして構成されている場合、I=πd4/64(式中、dは、シリンダの直径である)である。
器具が均一なシリンダである場合、横方向の力及びガイドチューブ内の器具の接触点を知ることによって、先端の偏向を推定することができる。いくつかの実施形態では、器具が先端に向かって先細になっているか、又はそうではないものの不均一である場合には、器具が先細りを開始し、ガイドチューブと隙なく接触しなくなった点では器具はチューブ内にあるため、チューブ内での正確な接触点は決定するのが困難であり得る。この場合、先端の偏向を較正することは、器具に取り付けられたひずみゲージ、具体的にはひずみゲージの装着点、及びガイドチューブの内部部分の幾何学的形状に基づいて行われる。次いで、このデータを使用して、器具2000の推定された偏向を計算する。
先端の偏向を較正するための別の実施形態では、器具のシャフトの周りに装着されたひずみゲージのセットからのひずみ測定値が、ニューラルネットワークと共に使用され得る。ニューラルネットワークは、ノードの応答のパターン(この場合、ひずみゲージのアレイからの出力)が入力として使用されて、異なるセットの入力に対して出力が十分に示差的である場合に、十分に定義された出力(この場合、横方向の偏向)を生成する数学的方法である。いくつかの実施形態では、器具偏向測定のためのニューラルネットワークは、光学的追跡、座標測定機(CMM)、又は他の手段を使用して偏向を測定しながら、ツール先端部の周りの異なるアプローチ角度で及び異なる接触場所に、既知の試験負荷を横方向で適用することによって使用される。ひとたびこのデータがニューラルネットワークの一部となると、ひずみゲージの出力がニューラルネットワークコンピュータモデルに連続的に供給され、偏向データがストリーミング出力され、システムによって表示され得る。
別の一実施形態では、ニューラルネットワーク又は物理モデリングは、図17に示されるように、2つのゾーンでの器具2004及びガイドチューブ2006の相互作用からのデータを適用することによって、使用され得る。第1のゾーンでは、先細の器具の2004は、ガイドチューブ2006内で終端しており、そのため、偏向のための応力中心間距離は、力を加える点から器具の最大直径がガイドチューブに接触する点までとなる。応力中心間距離は、器具2004がこのゾーンに留まる限り、負荷が加えられる固定点に固定されたままである。第2のゾーンでは、先細の器具の2004は、ガイドチューブ2006の外側で終端しており、偏向のための応力中心間距離は、力を加える点から器具2004がガイドチューブ2006を出る点までとなる。応力中心間距離は、器具2004がより突出するにつれて連続的に増加する。ガイドチューブの追跡アレイの場所に対する器具の追跡アレイの場所に基づいて、システムは、現在のゾーンを追跡し、ツールのニューラルネットワークモデル又は物理モデルを適切に解釈して、先端の力及び変位を計算することができる。
一実施形態では、ロボットアームに取り付けられた6軸ロードセルは、器具の先端と骨との相互作用によって引き起こされる力及びモーメントを評価することができる。スカイビングが器具に印加される横方向の力に起因して生じる場合には、以下の方法を利用して、起こり得るいかなるスカイビングも克服又は軽減することができる。一実施形態では、器具の先端は、鋭利であり、軸線方向の切断能力並びに側方向の切断能力で骨に貫入することができるように構成され得る。横方向の力が加えられたときの器具の鋭利な先端は、図18に示されるように、ドリルに対して45°の角度が付けられた表面に穴を開けることと同様であり得る。具体的には、図18は、軸線方向の切断能力を有する器具2008と、軸線方向及び横方向の側方向の切断能力を有する器具2010とが、傾斜面に衝突しているのを示す。
好ましい実施形態では、鋭利な先端を有する器具は、スカイビング前に骨の表面を切り裂く。場合によっては、器具がより大きな切断面を備えている場合でも、スカイビングが依然として発生し得る。これらの場合、一実施形態では、反復嵌入動作を使用して、骨を移動させることなく、骨の表面を通して器具を挿入することができる。このタッピング動作は、外科医によって適用されてもよく、図19に示されるように、器具が骨の表面を通って前進したときに、貫入に対する触覚的応答が信号伝達される。図19に示すような段階的動作又はタッピング動作は、スカイビングが発生するのを防ぐ。
ここで図20A~図20Eを参照すると、同図には、5つの自由度を有するロボット外科手術システムが示されている。ロボット外科手術システムのベースからエンドエフェクタに至る、これらの5つの自由度には、(1)垂直方向の直線運動(図20A)、(2)水平面内での肩回転(図20B)、(3)水平面内での肘回転(図20C)、(4)前腕のロール(図20D)、及び(5)エンドエフェクタのピッチ(図20E)が含まれる。これら5つの自由度があれば、ロボット外科手術システムを動かして、体内へのねじ配置及び体内への他の直線軌道の確保を容易にするある範囲の位置及び角度にガイドチューブを保持し得る。
これらの5つの自由度により、エンドエフェクタのガイドチューブを軌道ベクトルと位置揃えさせるのが可能になる。しかしながら、軌道ベクトルの周りのガイドチューブの回転位置は、独立的に選択はされず、これらの他の関節部の位置に依存する。この構成で5つの自由度を使用する場合、患者に近づく直線に沿ったロボットの移動は、通常、その移動中に、その移動に関連した、ガイドチューブの多少の残留回転を引き起こす(図21A~図21C)。
図21A~図21Cは、ロボットアーム2102、ベース2104、及びガイドチューブ2106を含む、ロボット外科手術システム2100を示す。図21A~図21Cはまとまって、直線に沿ったロボットアーム2102の移動を示す。図20A~図20Eに示される関節の協調的な動きが発生すると、ガイドチューブ2106を線に沿って中心に保つような制約動作が発生し、線及び空間に対するガイドチューブ2106の回転位置が変化する。
本開示の原理によれば、ガイドチューブの回転配向を近位の関節部に対して固定し、ガイドチューブの回転位置をこれらの他の関節の運動学によって決定することを可能にする代わりに、追加の自由度をロボットシステムに追加することができる。この追加の自由度は、ガイドチューブの中心軸線を中心とした自動回転を含む。図23を参照すると、モータ付きエンドエフェクタ2302、モータ2304、回転軸受2306、及びガイドチューブ2308を使用して、自動回転を提供することができる。自動回転は、回転軸受2306を用いてガイドチューブ2308をエンドエフェクタ2302に接続し、サーボモータなどの回転モータ2302を用いてガイドチューブ2308の回転位置を移動させることによって達成され得る。ガイドチューブ2308の回転運動を駆動させるための位置は、以下でより詳細に論じられるように、様々なタイプのセンサからのフィードバック、又はソフトウェアを介したユーザ入力に基づき得る。
軌道線を下方に移動しながら所望の配向を維持することにはいくつかの利点がある。例えば、椎体間ケージなどのいくつかのタイプの外科用インプラントは、特定の配向で挿入される。挿入軌道に沿ったすべての点でインプラントの配向を設定し、維持するシステムは、インプラントが適切な最終配向で挿入され、挿入中に組織又は他の器具に結合したり又はそれらをつかんだりすることがないことを確実にするであろう。
直線以外の経路に沿って移動する間に特定の配向が必要とされる状況の別の例は、外科医が特定の配向で組織を追跡又は切断することを望む場合である。例えば、図22A~図22Fに示されるように、軟組織を外科用メスで切断する、又は骨を骨用メスで切断する際に、フラットブレード2202がガイドチューブの軸線に対して垂直である場合には、フラットカットブレードをある特定のあり方で(すなわち、切断線に対して接線をなすように)保持することが望ましい場合があるであろう。
ガイドチューブ内でブレード2202を回転させるという追加の自由度によって、ロボットアームが意図された切断の経路を通って移動するにつれて、必要に応じてブレード2202を自動的に保持することが可能になるであろう。図に示されるように、図22A及び図22Dは、第1の位置におけるブレード2202の配向を示す。図22B及び図22Eは、ブレード2202が第2の位置に移動するのを示し、図22C及び22Fは、ブレード2202が、経路に沿って第3の位置に移動するのを示す。
上記のように、ロボットシステムは、いくつかの方法によってこの追加の自由度を制御するように動作することができるであろう。ソフトウェアによる入力によって、ロボットベースに対して、特定の位置、例えば0°、90°、180°、270°、又は0~360°の任意の値で、ガイドチューブの回転を固定することができる。順運動学を通じて、ロボットベースに対するガイドチューブの実際の位置は、関節位置の任意のセットに対して決定され得る。次いでガイドチューブの回転配向を指定の値で固定されたままとするように、ガイドチューブの回転位置を調整する。あるいは、計画された軌道に対して必要な場所にガイドチューブが位置決めされたときに外科用インプラントを正しく配向させる必要がある回転位置は、手動で又は自動的にソフトウェアで指定され得る。逆運動学を通じて、ガイドチューブがその位置にあることになる回転位置を予測することができる。次いで、ひとたびロボットアームが所定の位置に移動すると、この標的回転位置が達成されるように、ガイドチューブの回転位置を調整することができる。
追加の回転自由度はまた、上述したような反射球体の光学追跡などの追跡からのフィードバックを使用することもできるであろう。追跡システムがCTスキャンなどの患者の解剖学的構造に登録された場合には、患者及びロボットの追跡を通じて、ソフトウェアは、埋込みのための必要に応じて、インプラントが回転可能に配向されることを確実にするために、ロボットの任意の位置での解剖学的構造に対するガイドチューブの必要な回転位置を自動的に決定することができる。例えば、2つの椎体間の椎間板腔に挿入される椎体間インプラントの場合、配置角度は図面から、又は医療画像から椎間板隙の配向を自動的に検出することで決定してもよい。この位置は、患者上の基準アレイに対して設定され、ガイドチューブの回転は、アームの位置に関係なく、この角度を固定するように自動的に更新されて、インプラントが正しい配向で挿入されることを確実にする。
追跡システムからのフィードバックはまた、ガイドチューブ上に配置された可視光パターンのカメラベースの追跡を使用し得る。追跡可能なパターンは、例えば、ガイドチューブ上にラインをエッチング又は印刷することによって、ガイドチューブに人工的に追加されてもよく、あるいはパターンが、ガイドチューブそのものか又はガイドチューブからの延長部の自然な縁部であり得る。ガイドチューブの配向及び場所の追跡された位置フィードバックを使用して、システムは、ガイドチューブの回転位置を所望の回転に駆動することができるであろう。例えば、システムは、椎体間インプラントを挿入するために、ガイドチューブが椎間板隙と適切に位置揃えされることを確実にすることができるであろう。
図24を参照すると、エンドエフェクタ2302は、慣性センサ2402を含み得る。患者又は空間に対してガイドチューブの固定回転配向を維持するための別のフィードバック方法は、慣性又はティルトセンサ2402を使用することである。そのようなセンサは、重力方向を検出し、重力ベクトルに対する特定の位置揃えを維持するようにガイドチューブを配向するためにロボットシステムを方向付けることができるであろう。例えば、ガイドチューブの中心線から半径方向にオフセットされている慣性センサは、センサを通るガイドチューブの中心線からの半径方向ベクトルが回転自由度において可能な限り重力線と近接して配向される位置へと常に回転するようにガイドチューブを向けるフィードバックを提供することができる。すなわち、ガイドチューブの回転の0~360°の範囲に、重力ベクトルと、慣性センサを通るガイドチューブ中心からの半径方向ベクトルとの間の角度差が最小である解決策が存在する。
しかしながら、外科的目的のための身体内へのほとんどの直線軌道は、何らかの角度を有し、この方法は、ベースに対してより近い関節位置によって発生する通常の回転にもかかわらず、直線に沿って移動しながら、ガイドチューブの回転配向をロボットベースに対して固定された状態に維持するための簡単な方法であろう。
図25を参照すると、エンドエフェクタ2302は、力センサ2502を含み得る。ガイドチューブの回転配向を設定するための別のフィードバック方法は、力センサ2502である。そのようなセンサは、ロボットが、例えば切断などの、ガイドチューブの中心軸線に垂直な何らかの動作を実行するために使用される状況において効果的であろう。ガイドチューブに埋め込まれた力センサからの、感知された力の大きさ及び方向を使用して、ガイドチューブの回転配向を変更して、手術を容易にすることができる。例えば、ロボットが横方向に移動して組織を切断する又は組織を押し通すと、力の方向が検知され得るが、ロボットシステムは、最も鋭い縁が最も高い力の方向に向かうように、ガイドチューブを回転させる指示を送信することができる。
本発明のいくつかの実施形態が前述の明細書に開示されてきたが、前述の説明及び関連する図面に提示される教示の利点を有する本発明が属する、本発明の多くの修正及び他の実施形態が思い浮かぶことが理解される。したがって、本発明は、上記の特定の実施形態に限定されず、多くの修正及び他の実施形態が、添付の特許請求の範囲内に含まれることが意図されるということが理解される。更に、具体的な用語が、本明細書において、及び後続の特許請求の範囲において使用されるが、それらは、一般的かつ説明的な意味でのみ使用され、記載された本発明、又は以下の特許請求の範囲を限定する目的で使用されているのではない。
本発明が特定の実施形態及び実施例に関連して上記で説明されてきたが、本発明は必ずしもそのように限定されるものではなく、多数の他の実施形態、実施例、使用、修正、及び実施形態からの逸脱は、本明細書に添付の特許請求の範囲によって包含されることが意図されるということが当業者には理解されよう。本明細書で引用される各特許及び刊行物の開示全体は、そのような各特許又は刊行物が参照により本明細書に個別に組み込まれたかのように、参照により組み込まれる。本発明の様々な特徴及び利点は、以下の特許請求の範囲に記載されている。