JP7350532B2 - 遠心機 - Google Patents
遠心機 Download PDFInfo
- Publication number
- JP7350532B2 JP7350532B2 JP2019120681A JP2019120681A JP7350532B2 JP 7350532 B2 JP7350532 B2 JP 7350532B2 JP 2019120681 A JP2019120681 A JP 2019120681A JP 2019120681 A JP2019120681 A JP 2019120681A JP 7350532 B2 JP7350532 B2 JP 7350532B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- liquid
- motor
- control unit
- centrifuge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Centrifugal Separators (AREA)
Description
本発明の他の目的は、連続ロータ以外のロータも運転可能な遠心機の連続ロータ運転時に、モータと制御部から得られる各種情報を用いて液漏れの発生を検知することにより、液漏れ検知機能付加による製造コストの上昇を抑制することにある。
本発明のさらに他の目的は、連続ロータ以外のロータも運転可能な遠心機において、遠心機本体側で液漏れを検知した際に、表示装置にアラームを発するか、又は、ロータの回転を自動的に停止させることにある。
本発明の一つの特徴によれば、モータによって回転するロータと、ロータを収納するボウルと、モータを制御する制御部と、ロータの回転中に試料をロータの内部に送る機構を備えた遠心機において、制御部はロータの稼働情報を示す測定値を監視することによってロータからの液漏れを検出するように構成した。ロータの稼働情報を示す測定値は、例えば、ロータの加速中に測定されたロータの慣性モーメント、ロータの回転中のモータの電流値、モータのPWM制御のデューティ比のいずれか一つ以上である。ロータの慣性モーメントの測定は、制御部が連続ロータを一定の低速回転で回転させながらバッファ液を送液してロータの内部を満たし、その後に高速の設定遠心運転回転数まで加速させた時の加速中に測定すると良い。また、ロータの稼働情報を示す測定値として、これらの例示だけに限られず、他にもモータの電流値や、モータの滑り等を含むように構成しても良い。
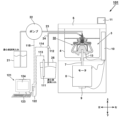
4a、4b 貫通穴 5 ドア 6 貫通穴 7 回転軸
8 モータ 9 回転計 10 制御部(コントローラ)
11 操作パネル 13 ロータID識別センサ 15 支持固定板
21 遠心前試料入れ 22 ポンプ 23 供給用パイプ
24 排出用パイプ 25 遠心後試料入れ 30 連続ロータ
31 ロータボディ 31a 遠心分離空間 32 コア体
32a 円筒壁 32b 試料通路 33 注入液溜め 34 排液器
35 シール部材(シールユニット) 36 注入通路 36a 注入口
37 排出通路 37a 上端接続部 38 リッド
39 シール液体溜め 41 回転数 42 電流値
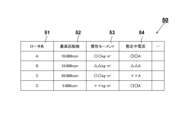
43、44 液量 50 データテーブル 51 ロータ名
52 最高回転速度 53 慣性モーメント 54 整定中電流
60 (漏れた)液体 80 表示画面 81 回転速度
82 運転時間 83 設定温度 84 アラーム 85 スタートボタン
86 ストップボタン 101 遠心機 111 水位計 112 流量計
113~115 信号 121 PC 122 本体部
123 キーボード 124 モニター A1 (ロータの)回転軸線
R1 低速回転数 R2 遠心回転数 T 遠心分離運転時間
Claims (9)
- モータによって回転するロータと、
前記ロータを収納するボウルと、
前記モータを制御する制御部と、
前記ロータの回転中に試料を前記ロータの内部に送る送液機構と、を備え、
前記制御部は、
前記ロータを一定の低速回転で回転させながらバッファ液を送液して前記ロータの内部を満たし、その後に高速の設定遠心運転回転数まで加速させ、
前記加速中の前記ロータの稼働情報を示す測定値を監視することによって、前記ロータからの液漏れを検出することを特徴とする遠心機。 - 前記測定値は、前記ロータの加速中に測定された前記ロータの慣性モーメントであることを特徴とする請求項1に記載の遠心機。
- 前記測定値は、前記ロータの回転中の前記モータの電流値であることを特徴とする請求項1に記載の遠心機。
- 前記測定値は、前記モータのPWM制御のデューティ比であることを特徴とする請求項1に記載の遠心機。
- 遠心運転状態を表示する表示部を備え、
前記制御部は、前記ロータからの液漏れを検出したら、前記表示部に液漏れが発生したことを表示することを特徴とする請求項1から4のいずれか一項に記載の遠心機。 - 前記制御部は、前記ロータからの液漏れの検出をしたら、前記モータを停止させることを特徴とする請求項5に記載の遠心機。
- 前記制御部は、前記ロータからの液漏れの検出をしたら、前記送液機構による前記試料の送液を停止させることを特徴とする請求項1から6のいずれか一項に記載の遠心機。
- モータによって回転するロータと、
前記ロータを収納するボウルと、
前記モータを制御する制御部と、
前記ロータの回転中に試料を前記ロータの内部に送る送液機構と、を備えた遠心機であって、
前記制御部は、連続ロータを加速させて低速の定回転で回転させながらバッファ液を送液して前記ロータの内部を満たし、その後に前記ロータを高速の設定遠心運転回転数まで加速させ、
前記ロータの2回目の加速の時に、前記モータの制御信号と回転数信号から前記送液機構からの液漏れの発生の有無を判別し、
前記液漏れの発生を判別したら表示部に液漏れをしている旨の警告を出すようにしたことを特徴とする遠心機。 - 前記制御部は、
前記ロータの2回目以降の定速回転時において、前記モータの制御信号と回転数信号から前記送液機構からの液漏れの発生の有無を判別し、
前記液漏れの発生を判別したら表示部に液漏れをしている旨の警告を出すようにしたことを特徴とする請求項8に記載の遠心機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019120681A JP7350532B2 (ja) | 2019-06-28 | 2019-06-28 | 遠心機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019120681A JP7350532B2 (ja) | 2019-06-28 | 2019-06-28 | 遠心機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021006334A JP2021006334A (ja) | 2021-01-21 |
| JP7350532B2 true JP7350532B2 (ja) | 2023-09-26 |
Family
ID=74165383
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019120681A Active JP7350532B2 (ja) | 2019-06-28 | 2019-06-28 | 遠心機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7350532B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009262104A (ja) | 2008-04-28 | 2009-11-12 | Hitachi Koki Co Ltd | 連続遠心分離機 |
| JP2010125445A (ja) | 2008-12-01 | 2010-06-10 | Olympus Corp | 細胞処理装置 |
| JP2012223664A (ja) | 2011-04-15 | 2012-11-15 | Hitachi Koki Co Ltd | 遠心分離機 |
-
2019
- 2019-06-28 JP JP2019120681A patent/JP7350532B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009262104A (ja) | 2008-04-28 | 2009-11-12 | Hitachi Koki Co Ltd | 連続遠心分離機 |
| JP2010125445A (ja) | 2008-12-01 | 2010-06-10 | Olympus Corp | 細胞処理装置 |
| JP2012223664A (ja) | 2011-04-15 | 2012-11-15 | Hitachi Koki Co Ltd | 遠心分離機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021006334A (ja) | 2021-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5788490B2 (ja) | 遠心分離機のシステム及び方法 | |
| CN103002932B (zh) | 在用于生物流体的离心装置中优化旋转时间的方法 | |
| JP5259595B2 (ja) | 複合液体を少なくとも2つの成分に分離するための装置及び方法 | |
| US8295984B2 (en) | Method for detecting the position of a closure element in a water distribution mechanism | |
| KR20230144112A (ko) | 혈장 수집 시스템 및 방법 | |
| US20150367063A1 (en) | Blood Component Separation Apparatus | |
| TW200934911A (en) | Washing machine | |
| US8120760B2 (en) | Method and apparatus for separating a composite liquid into at least two components and for determining the yield of at least one component | |
| ITMI20010899A1 (it) | Sistema di controllo della fase di lavaggio in cella per la centrifugazione del sangue | |
| JP7350532B2 (ja) | 遠心機 | |
| JP6919535B2 (ja) | 分注装置 | |
| US8262551B2 (en) | Centrifuge having displacement sensor | |
| EP3003567B1 (en) | Centrifugal separator and method for determining suitable moment for removal of heavy phase content | |
| CN115103725B (zh) | 用于确定空气是否截留在离心分离器内的方法 | |
| JP7152509B2 (ja) | 連続遠心機及び連続遠心機のエア排出方法 | |
| WO2022180941A1 (ja) | 遠心機 | |
| JP2017012974A (ja) | 遠心機 | |
| JP6252139B2 (ja) | 遠心機 | |
| JPH11138050A (ja) | 分離板型遠心分離機のスラッジ排出量測定方法及び測定装置 | |
| JP2013000690A (ja) | 遠心分離機 | |
| JP2012055853A (ja) | 遠心分離装置および遠心分離方法 | |
| JP2021104500A (ja) | 遠心機 | |
| JPH01190396A (ja) | 布量検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20200729 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230509 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230705 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230913 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7350532 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |