JP7344032B2 - 画像処理装置 - Google Patents
画像処理装置 Download PDFInfo
- Publication number
- JP7344032B2 JP7344032B2 JP2019133867A JP2019133867A JP7344032B2 JP 7344032 B2 JP7344032 B2 JP 7344032B2 JP 2019133867 A JP2019133867 A JP 2019133867A JP 2019133867 A JP2019133867 A JP 2019133867A JP 7344032 B2 JP7344032 B2 JP 7344032B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- straight line
- distance values
- representative distance
- approximate straight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/187—Segmentation; Edge detection involving region growing; involving region merging; involving connected component labelling
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2200/00—Indexing scheme for image data processing or generation, in general
- G06T2200/32—Indexing scheme for image data processing or generation, in general involving image mosaicing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
- G06T2207/10012—Stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20068—Projection on vertical or horizontal image axis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
[構成例]
図1は、一実施の形態に係る画像処理装置(画像処理装置1)の一構成例を表すものである。画像処理装置1は、ステレオカメラ11と、処理部20とを有している。画像処理装置1は、自動車等の車両10に搭載される。
続いて、本実施の形態の画像処理装置1の動作および作用について説明する。
まず、図1を参照して、画像処理装置1の全体動作概要を説明する。ステレオカメラ11は、車両10の前方を撮像することにより、左画像PLおよび右画像PRを含むステレオ画像PICを生成する。処理部20は、ステレオカメラ11から供給されたステレオ画像PICに基づいて、左画像PLおよび右画像PRに含まれる、車両10の前方の車両などの様々な物体のそれぞれに、画像領域Rを設定することにより、物体を認識する。
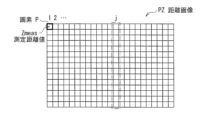
図5は、処理部20の一動作例を表すものである。処理部20は、ステレオカメラ11からステレオ画像PICが供給される度に、そのステレオ画像PICに基づいて、距離画像PZを生成し、この距離画像PZに基づいて複数の画像領域Rを設定する。そして、処理部20は、1つの画像領域Rを分割し、あるいは2つの画像領域Rを結合することにより、1または複数の画像領域Rを設定する。以下に、この処理について詳細に説明する。
次に、図5のステップS105に示した領域分割処理Aに含まれる、分割処理A1について詳細に説明する。

次に、図5のステップS106に示した領域結合処理Bに含まれる、結合処理B1について詳細に説明する。
次に、図5のステップS106に示した領域結合処理Bに含まれる、結合処理B2について詳細に説明する。
以上のように本実施の形態では、画像領域R1が属する複数の画素列に対応する複数の代表距離値に基づいて、画像領域R1が他車両のコーナー部の画像を含むかどうかを判定し、この画像領域R1がコーナー部の画像を含む場合に、そのコーナー部に基づいて分割処理を行うことにより2つの画像領域R2,R3を設定するようにした。これにより、他車両の側面とその他車両の背面に、別々の画像領域R2,R3をそれぞれ設定することができるので、適切に画像領域を設定することができる。
Claims (10)
- ステレオ画像に基づいて生成された、各画素での距離値を含む距離画像に基づいて、前記距離画像における複数の画素列に対応づけられ、それぞれが、対応する画素列における前記距離値の代表値である複数の代表距離値を生成する代表距離算出部と、
前記ステレオ画像に含まれる、他車両を含む1または複数の物体の画像に基づいて設定された第1の画像領域および第2の画像領域を結合する結合処理を行うことが可能であり、前記第1の画像領域および前記第2の画像領域が仮結合された領域である仮結合領域が、前記他車両のコーナー部の画像を含むかどうかを判定する判定処理を行い、前記仮結合領域が前記コーナー部の画像を含む場合に、前記結合処理を回避する結合処理部と
を備え、
前記結合処理部は、
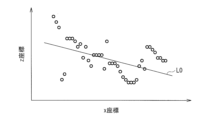
前記第1の画像領域において、前記複数の代表距離値のうちの、前記第1の画像領域が属する複数の画素列に対応する第1の複数の代表距離値に基づいて第1の近似直線を生成するとともに、前記第1の複数の代表距離値の前記第1の近似直線からの第1のばらつき度合いを算出し、
前記第2の画像領域において、前記複数の代表距離値のうちの、前記第2の画像領域が属する複数の画素列に対応する第2の複数の代表距離値に基づいて第2の近似直線を生成するとともに、前記第2の複数の代表距離値の前記第2の近似直線からの第2のばらつき度合いを算出し、
前記第1のばらつき度合いおよび前記第2のばらつき度合いに基づいて前記判定処理を行う
画像処理装置。 - 前記第1の画像領域における画像は、前記他車両の側面を示し、
前記第2の画像領域における画像は、前記他車両の背面を示す
請求項1に記載の画像処理装置。 - 前記結合処理部は、前記判定処理において、
前記仮結合領域において、前記第1の複数の代表距離値および前記第2の複数の代表距離値に基づいて第3の近似直線を生成するとともに、前記第1の複数の代表距離値および前記第2の複数の代表距離値の前記第3の近似直線からの第3のばらつき度合いを算出し、
前記第1のばらつき度合い、前記第2のばらつき度合い、および前記第3のばらつき度合いに基づいて、前記仮結合領域が前記コーナー部の画像を含むと判定する
請求項1または請求項2に記載の画像処理装置。 - 前記結合処理部は、前記判定処理において、
前記仮結合領域において、前記第1の複数の代表距離値および前記第2の複数の代表距離値に基づいて第3の近似直線を生成し、
前記第1の画像領域において、前記第1の複数の代表距離値の前記第3の近似直線からの第4のばらつき度合いを算出し、
前記第2の画像領域において、前記第2の複数の代表距離値の前記第3の近似直線からの第5のばらつき度合いを算出し、
前記第1のばらつき度合い、前記第2のばらつき度合い、前記第4のばらつき度合い、および前記第5のばらつき度合いに基づいて、前記仮結合領域が前記コーナー部の画像を含むと判定する
請求項1または請求項2に記載の画像処理装置。 - 前記1または複数の物体の画像に基づいて第3の画像領域を設定する画像領域設定部と、
前記第3の画像領域を前記第1の画像領域および前記第2の画像領域に分割する分割処理を行うことが可能であり、前記第3の画像領域が属する複数の画素列に対応する第3の複数の代表距離値に基づいて、前記第3の画像領域が前記他車両の前記コーナー部の画像を含むかどうかを判定する初期判定処理を行い、前記第3の画像領域が前記コーナー部の画像を含む場合に、前記コーナー部に基づいて前記分割処理を行う分割処理部をさらに備えた
請求項1から請求項4のいずれか一項に記載の画像処理装置。 - 前記分割処理部は、前記初期判定処理において、
前記第3の画像領域において仮分割位置を設定し、
前記第3の複数の代表距離値を、前記仮分割位置に基づいて第1のグループおよび第2のグループに区分し、
前記第3の複数の代表距離値のうちの、前記第1のグループに区分された前記第3の複数の代表距離値に基づいて第4の近似直線を生成し、
前記第3の複数の代表距離値のうちの、前記第2のグループに区分された前記第3の複数の代表距離値に基づいて第5の近似直線を生成し、
前記第4の近似直線および前記第5の近似直線に基づいて、前記第3の画像領域における分割位置を設定する
請求項5に記載の画像処理装置。 - 前記分割処理部は、所定の条件を満たした場合に、前記第3の画像領域が前記コーナー部の画像を含むと判定し、
前記所定の条件は、前記第3の画像領域における前記分割位置についての第1の条件を満たすことを含む
請求項6に記載の画像処理装置。 - 前記分割処理部は、所定の条件を満たした場合に、前記第3の画像領域が前記コーナー部の画像を含むと判定し、
前記所定の条件は、前記第4の近似直線および前記第5の近似直線がなす角度についての第2の条件を満たすことを含む
請求項6または請求項7に記載の画像処理装置。 - 前記分割処理部は、前記初期判定処理において、
前記第3の複数の代表距離値に基づいて第6の近似直線を生成するとともに、前記第3の複数の代表距離値の前記第6の近似直線からの第6のばらつき度合いを算出し、
前記第3の複数の代表距離値のうちの、前記第1のグループに区分された前記第3の複数の代表距離値の前記第4の近似直線からの第7のばらつき度合いを算出し、
前記第3の複数の代表距離値のうちの、前記第2のグループに区分された前記第3の複数の代表距離値の前記第5の近似直線からの第8のばらつき度合いを算出し、
所定の条件を満たした場合に、前記第3の画像領域が前記コーナー部の画像を含むと判定し、
前記所定の条件は、前記第6のばらつき度合い、前記第7のばらつき度合い、および前記第8のばらつき度合いについての第3の条件を満たすことを含む
請求項6から請求項8のいずれか一項に記載の画像処理装置。 - 前記分割処理部は、前記初期判定処理において、
前記第3の画像領域において複数の仮分割位置を設定し、
前記複数の仮分割位置のそれぞれに基づいて、前記第3の複数の代表距離値を、前記第1のグループおよび前記第2のグループに区分し、
前記複数の仮分割位置のそれぞれについて、前記第3の複数の代表距離値のうちの、前記第1のグループに区分された前記第3の複数の代表距離値に基づいて前記第4の近似直線を生成し、前記第1のグループに区分された前記第3の複数の代表距離値の前記第4の近似直線からの第7のばらつき度合いを算出し、
前記複数の仮分割位置のそれぞれについて、前記第3の複数の代表距離値のうちの、前記第2のグループに区分された前記第3の複数の代表距離値に基づいて前記第5の近似直線を生成し、前記第2のグループに区分された前記第3の複数の代表距離値の前記第5の近似直線からの第8のばらつき度合いを算出し、
前記複数の仮分割位置のそれぞれにおける、前記第7のばらつき度合いおよび前記第8のばらつき度合いに基づいて、前記複数の仮分割位置の1つを前記仮分割位置として選択する
請求項6に記載の画像処理装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019133867A JP7344032B2 (ja) | 2019-07-19 | 2019-07-19 | 画像処理装置 |
| US16/844,664 US11295465B2 (en) | 2019-07-19 | 2020-04-09 | Image processing apparatus |
| CN202010392738.2A CN112241979A (zh) | 2019-07-19 | 2020-05-11 | 图像处理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019133867A JP7344032B2 (ja) | 2019-07-19 | 2019-07-19 | 画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021018605A JP2021018605A (ja) | 2021-02-15 |
| JP7344032B2 true JP7344032B2 (ja) | 2023-09-13 |
Family
ID=74170474
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019133867A Active JP7344032B2 (ja) | 2019-07-19 | 2019-07-19 | 画像処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11295465B2 (ja) |
| JP (1) | JP7344032B2 (ja) |
| CN (1) | CN112241979A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023112127A1 (ja) * | 2021-12-14 | 2023-06-22 | 日立Astemo株式会社 | 画像認識装置、および、画像認識方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010271964A (ja) | 2009-05-22 | 2010-12-02 | Fuji Heavy Ind Ltd | 道路形状認識装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3349060B2 (ja) * | 1997-04-04 | 2002-11-20 | 富士重工業株式会社 | 車外監視装置 |
| JP3261115B2 (ja) * | 1999-09-22 | 2002-02-25 | 富士重工業株式会社 | ステレオ画像処理装置 |
| EP1901225A1 (en) * | 2005-05-10 | 2008-03-19 | Olympus Corporation | Image processing device, image processing method, and image processing program |
| KR102153030B1 (ko) * | 2013-11-05 | 2020-09-07 | 현대모비스 주식회사 | 주차 지원 장치 및 방법 |
| JPWO2017056484A1 (ja) * | 2015-09-28 | 2018-04-19 | 京セラ株式会社 | 画像処理装置、ステレオカメラ装置、車両及び画像処理方法 |
| US10628960B2 (en) * | 2016-11-24 | 2020-04-21 | Ricoh Company, Ltd. | Information processing apparatus, imaging apparatus, device control system, moving object, information processing method, and recording medium |
| JP6621445B2 (ja) | 2017-06-19 | 2019-12-18 | 日本電信電話株式会社 | 特徴抽出装置、物体検出装置、方法、及びプログラム |
-
2019
- 2019-07-19 JP JP2019133867A patent/JP7344032B2/ja active Active
-
2020
- 2020-04-09 US US16/844,664 patent/US11295465B2/en active Active
- 2020-05-11 CN CN202010392738.2A patent/CN112241979A/zh active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010271964A (ja) | 2009-05-22 | 2010-12-02 | Fuji Heavy Ind Ltd | 道路形状認識装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210019902A1 (en) | 2021-01-21 |
| CN112241979A (zh) | 2021-01-19 |
| JP2021018605A (ja) | 2021-02-15 |
| US11295465B2 (en) | 2022-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5944781B2 (ja) | 移動体認識システム、移動体認識プログラム、及び移動体認識方法 | |
| JP6519262B2 (ja) | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム | |
| EP2757524B1 (en) | Depth sensing method and system for autonomous vehicles | |
| JP6131704B2 (ja) | 連続型道路分割体の検知方法及び連続型道路分割体の検知装置 | |
| CN108647638A (zh) | 一种车辆位置检测方法及装置 | |
| CN107491065B (zh) | 利用障碍物的地面边界信息检测物体的侧面的方法和装置 | |
| KR102569437B1 (ko) | 3차원 영상정보 기반 객체 추적 장치 및 방법 | |
| CN109074653B (zh) | 用于检测机动车辆的道路旁边的物体的方法、计算设备、驾驶员辅助系统以及机动车辆 | |
| JP2009075938A (ja) | 道路形状推定装置 | |
| CN109791607B (zh) | 借助单应矩阵从摄像机的一系列图像中探测和验证对象 | |
| CN111612728A (zh) | 一种基于双目rgb图像的3d点云稠密化方法和装置 | |
| CN111046719A (zh) | 用于转换图像的设备和方法 | |
| CN112927309A (zh) | 一种车载相机标定方法、装置、车载相机及存储介质 | |
| CN110809766B (zh) | 高级驾驶员辅助系统和方法 | |
| JP7344032B2 (ja) | 画像処理装置 | |
| JP7344031B2 (ja) | 画像処理装置 | |
| JP5655038B2 (ja) | 移動体認識システム、移動体認識プログラム、及び移動体認識方法 | |
| US20220410942A1 (en) | Apparatus and method for determining lane change of surrounding objects | |
| CN112601064B (zh) | 图像处理装置 | |
| JP7246165B2 (ja) | 路面検出装置 | |
| WO2020036039A1 (ja) | ステレオカメラ装置 | |
| CN113834463A (zh) | 基于绝对尺寸的智能车侧方行人/车单目深度测距方法 | |
| JP7216526B2 (ja) | 車外環境認識装置および車外環境認識方法 | |
| GÜNGÖR et al. | Stereo-image-based ground-line prediction and obstacle detection | |
| KR102424664B1 (ko) | 3차원 영상정보 기반 객체 추적 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220318 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230320 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230901 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7344032 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |