JP7333890B2 - アクチュエータ - Google Patents
アクチュエータ Download PDFInfo
- Publication number
- JP7333890B2 JP7333890B2 JP2023529302A JP2023529302A JP7333890B2 JP 7333890 B2 JP7333890 B2 JP 7333890B2 JP 2023529302 A JP2023529302 A JP 2023529302A JP 2023529302 A JP2023529302 A JP 2023529302A JP 7333890 B2 JP7333890 B2 JP 7333890B2
- Authority
- JP
- Japan
- Prior art keywords
- shaft
- support member
- hole
- actuator
- hook
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/06—Means for converting reciprocating motion into rotary motion or vice versa
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Motor Or Generator Frames (AREA)
Description
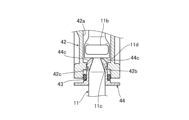
実施の形態1に係るアクチュエータ10について、図1から図4を用いて説明する。
Claims (6)
- シャフトの軸方向に延びる貫通孔と、
前記貫通孔にOリングを介して取り付けられ、前記シャフトを軸方向に移動可能に支持し、弾性樹脂材料で形成される円筒状の支持部材と、
前記貫通孔から径方向内側に向けて突出する段差部と、
前記支持部材に形成され、径方向外側に向けて突出するフック形状を有し、前記段差部に係止するフック部とを備え、
前記シャフトは、外径が、前記支持部材の前記貫通孔への差し込み方向側に向かうに従って、徐々に小さくなる円錐部を有し、
前記円錐部は、前記段差部に載り上がったときの前記フック部の弾性変形を受ける
ことを特徴とするアクチュエータ。 - 前記円錐部の軸方向長さは、前記段差部の設置位置と前記Oリングの設置位置との間の長さよりも短い
ことを特徴とする請求項1記載のアクチュエータ。 - 前記円錐部の外周面の傾斜角度は、前記シャフトの軸心に対して、20度以上25度以下である
ことを特徴とする請求項1記載のアクチュエータ。 - 前記支持部材は、周方向において、前記フック部と切り欠きとを交互に複数備える
ことを特徴とする請求項1記載のアクチュエータ。 - 各切り欠きの幅の総和は、前記支持部材の内周の3分の1を占める
ことを特徴とする請求項4記載のアクチュエータ。 - 前記支持部材を形成する弾性樹脂材料は、ポリテトラフルオロエチレンである
ことを特徴とする請求項1記載のアクチュエータ。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/023704 WO2022269784A1 (ja) | 2021-06-23 | 2021-06-23 | アクチュエータ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022269784A1 JPWO2022269784A1 (ja) | 2022-12-29 |
| JPWO2022269784A5 JPWO2022269784A5 (ja) | 2023-07-21 |
| JP7333890B2 true JP7333890B2 (ja) | 2023-08-25 |
Family
ID=84545369
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023529302A Active JP7333890B2 (ja) | 2021-06-23 | 2021-06-23 | アクチュエータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7333890B2 (ja) |
| WO (1) | WO2022269784A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140190287A1 (en) | 2013-01-07 | 2014-07-10 | Trelleborg Sealing Solutions Us, Inc. | Ball screw seal |
| JP2016507440A (ja) | 2013-02-23 | 2016-03-10 | グライフ・インターナショナル・ホールディング・ベスローテン・フェンノートシャップGreif International Holding BV | 圧入フランジ容器のクロージャシステム |
| JP6153328B2 (ja) | 2013-01-23 | 2017-06-28 | 大阪瓦斯株式会社 | コージェネレーションシステム及び暖房設備 |
| WO2019043884A1 (ja) | 2017-08-31 | 2019-03-07 | 三菱電機株式会社 | アクチュエータ |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS48109682U (ja) * | 1972-03-24 | 1973-12-17 | ||
| JPH06153328A (ja) * | 1992-11-10 | 1994-05-31 | Toyotsukusu:Kk | 可撓管用継手 |
-
2021
- 2021-06-23 WO PCT/JP2021/023704 patent/WO2022269784A1/ja unknown
- 2021-06-23 JP JP2023529302A patent/JP7333890B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140190287A1 (en) | 2013-01-07 | 2014-07-10 | Trelleborg Sealing Solutions Us, Inc. | Ball screw seal |
| JP6153328B2 (ja) | 2013-01-23 | 2017-06-28 | 大阪瓦斯株式会社 | コージェネレーションシステム及び暖房設備 |
| JP2016507440A (ja) | 2013-02-23 | 2016-03-10 | グライフ・インターナショナル・ホールディング・ベスローテン・フェンノートシャップGreif International Holding BV | 圧入フランジ容器のクロージャシステム |
| WO2019043884A1 (ja) | 2017-08-31 | 2019-03-07 | 三菱電機株式会社 | アクチュエータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022269784A1 (ja) | 2022-12-29 |
| WO2022269784A1 (ja) | 2022-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10495198B2 (en) | Step actuator | |
| WO2013164889A1 (ja) | 回転電機 | |
| US20080122303A1 (en) | Direct-current motor and manufacturing method for the direct-current motor | |
| CN107546952B (zh) | 步进致动器 | |
| CN109322922B (zh) | 轴承组件及电动机 | |
| JP7033810B2 (ja) | ブラシ付き永久磁石マイクロモータ及びその組立方法 | |
| JP2002122203A (ja) | リニアアクチュエータ | |
| JP2021519568A (ja) | 機械的振動エネルギーを電気エネルギーに変換するための電気機械発電機 | |
| JP7333890B2 (ja) | アクチュエータ | |
| JP2013514754A (ja) | 電気モータ | |
| CN109716628A (zh) | 马达 | |
| CN109716629B (zh) | 马达 | |
| CN109792186A (zh) | 马达 | |
| JP6529673B2 (ja) | 車載用アクチュエータ | |
| CN108370192B (zh) | 马达 | |
| JP2016041958A (ja) | 軸受装置及びモータ | |
| JP7219138B2 (ja) | モータおよび弁体駆動装置 | |
| JP7019810B2 (ja) | アクチュエータ | |
| JP2009207326A (ja) | モータ用コミュテータ | |
| WO2022202274A1 (ja) | 電動機及び電動送風機 | |
| CN112117836A (zh) | 马达的定子结构以及马达 | |
| JP3503794B2 (ja) | モータ | |
| JP2024011531A (ja) | モータ | |
| KR101338621B1 (ko) | 스텝 액츄에이터 | |
| KR101438813B1 (ko) | 선형 액츄에이터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230602 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230602 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20230602 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230718 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230815 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7333890 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |