JP7332425B2 - 計算機システム - Google Patents
計算機システム Download PDFInfo
- Publication number
- JP7332425B2 JP7332425B2 JP2019190398A JP2019190398A JP7332425B2 JP 7332425 B2 JP7332425 B2 JP 7332425B2 JP 2019190398 A JP2019190398 A JP 2019190398A JP 2019190398 A JP2019190398 A JP 2019190398A JP 7332425 B2 JP7332425 B2 JP 7332425B2
- Authority
- JP
- Japan
- Prior art keywords
- machine learning
- computer system
- episode
- learning model
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/04—Inference or reasoning models
- G06N5/045—Explanation of inference; Explainable artificial intelligence [XAI]; Interpretable artificial intelligence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/004—Artificial life, i.e. computing arrangements simulating life
- G06N3/006—Artificial life, i.e. computing arrangements simulating life based on simulated virtual individual or collective life forms, e.g. social simulations or particle swarm optimisation [PSO]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/088—Non-supervised learning, e.g. competitive learning
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Physics & Mathematics (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Artificial Intelligence (AREA)
- Medical Informatics (AREA)
- Computational Linguistics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Description
Claims (12)
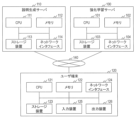
- 機械学習モデルの根拠の説明を生成する計算機システムであって、
1以上のプロセッサと、
前記1以上のプロセッサが実行するプログラムを格納する1以上の記憶装置と、を含み、
前記機械学習モデルは、状態が変化する環境において適切な出力を推定し、
前記1以上のプロセッサは、
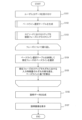
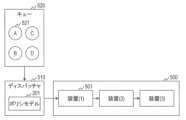
エピソードを取得し、前記エピソードは異なる時刻のステップを含み、前記ステップの各ステップは前記環境の状態及び前記状態における前記機械学習モデルの選択した出力を示し、
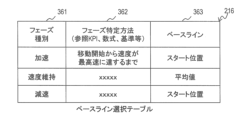
前記エピソードにおいて、変化する1以上の指標に基づき1以上の連続するステップからなる複数のフェーズを構成し、
前記複数のフェーズにおける前記機械学習モデルの根拠を説明するデータを生成する、計算機システム。 - 請求項1に記載の計算機システムであって、
前記1以上のプロセッサは、前記複数のフェーズそれぞれに対して前記機械学習モデルの根拠を説明するための基準を決定し、前記基準に基づいて前記機械学習モデルの根拠を説明するデータを生成する、計算機システム。 - 請求項2に記載の計算機システムであって、
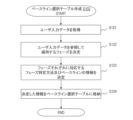
前記1以上のプロセッサは、ユーザ入力に従って前記1以上の指標を決定する、計算機システム。 - 請求項3に記載の計算機システムであって、
前記1以上のプロセッサは、前記エピソードに適用するフェーズ種別、前記フェーズ種別を特定する方法及び前記フェーズ種別それぞれの基準を示す情報を、前記ユーザ入力に応じて生成する、計算機システム。 - 請求項1に記載の計算機システムであって、
出力装置をさらに含み、
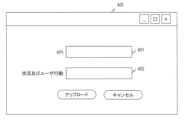
前記出力装置は、前記機械学習モデルの根拠を説明するサリエンシビデオを表示する、計算機システム。 - 請求項1に記載の計算機システムであって、
出力装置をさらに含み、
前記出力装置は、前記機械学習モデルの根拠を説明する、フェーズの変化の状態遷移図を表示する、計算機システム。 - 計算機システムが、機械学習モデルの根拠の説明を生成する方法であって、
前記機械学習モデルは、状態が変化する環境において適切な出力を推定し、
前記方法は、前記計算機システムが、
エピソードを取得し、前記エピソードは異なる時刻のステップを含み、前記ステップの各ステップは前記環境の状態及び前記状態における前記機械学習モデルの選択した出力を示し、
前記エピソードにおいて、変化する1以上の指標に基づき1以上の連続するステップからなる複数のフェーズを構成し、
前記複数のフェーズにおける前記機械学習モデルの根拠を説明するデータを生成する、方法。 - 請求項7に記載の方法であって、
前記計算機システムが、前記複数のフェーズそれぞれに対して前記機械学習モデルの根拠を説明するための基準を決定し、前記基準に基づいて前記機械学習モデルの根拠を説明するデータを生成する、方法。 - 請求項8に記載の方法であって、
前記計算機システムが、ユーザ入力に従って前記1以上の指標を決定する、方法。 - 請求項9に記載の方法であって、
前記計算機システムが、前記エピソードに適用するフェーズ種別、前記フェーズ種別を特定する方法及び前記フェーズ種別それぞれの基準を示す情報を、前記ユーザ入力に応じて生成する、方法。 - 請求項7に記載の方法であって、
前記計算機システムが、前記機械学習モデルの根拠を説明するサリエンシビデオを表示する、方法。 - 請求項7に記載の方法であって、
前記計算機システムが、前記機械学習モデルの根拠を説明する、フェーズの変化の状態遷移図を表示する、方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019190398A JP7332425B2 (ja) | 2019-10-17 | 2019-10-17 | 計算機システム |
| US17/071,482 US20210117831A1 (en) | 2019-10-17 | 2020-10-15 | Computer System |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019190398A JP7332425B2 (ja) | 2019-10-17 | 2019-10-17 | 計算機システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021067971A JP2021067971A (ja) | 2021-04-30 |
| JP2021067971A5 JP2021067971A5 (ja) | 2022-08-26 |
| JP7332425B2 true JP7332425B2 (ja) | 2023-08-23 |
Family
ID=75491285
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019190398A Active JP7332425B2 (ja) | 2019-10-17 | 2019-10-17 | 計算機システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20210117831A1 (ja) |
| JP (1) | JP7332425B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024241400A1 (ja) * | 2023-05-19 | 2024-11-28 | 三菱電機株式会社 | 学習装置、推論装置、施策立案支援システム、プログラム、学習方法及び推論方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018147489A (ja) | 2017-03-08 | 2018-09-20 | 富士通株式会社 | 複数のq学習カテゴリーを使う交通信号制御 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7254524B1 (en) * | 2001-07-12 | 2007-08-07 | Cisco Technology, Inc. | Method and system for a simulation authoring environment implemented in creating a simulation application |
| US8290885B2 (en) * | 2008-03-13 | 2012-10-16 | Sony Corporation | Information processing apparatus, information processing method, and computer program |
| JP2012079178A (ja) * | 2010-10-04 | 2012-04-19 | Sony Corp | データ処理装置、データ処理方法、及び、プログラム |
-
2019
- 2019-10-17 JP JP2019190398A patent/JP7332425B2/ja active Active
-
2020
- 2020-10-15 US US17/071,482 patent/US20210117831A1/en not_active Abandoned
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018147489A (ja) | 2017-03-08 | 2018-09-20 | 富士通株式会社 | 複数のq学習カテゴリーを使う交通信号制御 |
Non-Patent Citations (2)
| Title |
|---|
| 森啓介 ほか,"Attention Branch Networkによる一貫学習・強化学習におけるアテンションの獲得",第36回日本ロボット学会学術講演会,2018年09月04日 |
| 長嶺一輝 ほか,"深層強化学習エージェントの行動別顕著性マップの生成に関する考察", 2019年度人工知能学会全国大会(第33回),2019年06月04日 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210117831A1 (en) | 2021-04-22 |
| JP2021067971A (ja) | 2021-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Ernst et al. | Fast falsification of hybrid systems using probabilistically adaptive input | |
| Li et al. | Throughput bottleneck prediction of manufacturing systems using time series analysis | |
| JP7215077B2 (ja) | 予測プログラム、予測方法及び予測装置 | |
| JP2019204490A (ja) | 自動電磁干渉フィルタ設計システム、その方法およびコンピュータ可読媒体 | |
| US10249197B2 (en) | Method and system for mission planning via formal verification and supervisory controller synthesis | |
| US20170061804A1 (en) | Air vehicle navigation systems and methods using a common runtime aircraft intent data structure | |
| EP3086229A1 (en) | Managing hydrocarbon energy production while proactively maintaining a balanced workload | |
| US11702101B2 (en) | Automatic scenario generator using a computer for autonomous driving | |
| JP6944386B2 (ja) | 故障診断支援装置 | |
| JP6094593B2 (ja) | 情報システム構築装置、情報システム構築方法および情報システム構築プログラム | |
| US20200034706A1 (en) | Imitation learning by action shaping with antagonist reinforcement learning | |
| KR102588260B1 (ko) | 직관성이 향상된 인포그래픽 시스템 | |
| JP2017146888A (ja) | 設計支援装置及び方法及びプログラム | |
| JPWO2014181495A1 (ja) | 仮想マシン配置決定装置、仮想マシン配置決定方法および仮想マシン配置決定プログラム | |
| JP5910499B2 (ja) | 拡張性評価装置、拡張性評価方法および拡張性評価プログラム | |
| JP7332425B2 (ja) | 計算機システム | |
| JP2014132419A (ja) | 仮想化システムの性能予測装置、性能予測方法およびコンピュータ・プログラム | |
| WO2015173903A1 (ja) | シミュレーション実行装置及びシミュレーション実行方法 | |
| JP7310735B2 (ja) | 多性能最適化設計装置、及び多性能最適化設計方法 | |
| JP2005049922A (ja) | ジョブ実行計画の評価システム | |
| JP2014174609A (ja) | ハードウェア構成見積システム、ハードウェア構成見積方法及びハードウェア構成見積プログラム | |
| WO2017109821A1 (ja) | 計算機システムの管理システム及び管理方法 | |
| KR102520732B1 (ko) | 유동해석 데이터 처리장치 및 그 장치에서 각 기능을 실행시키기 위해 매체에 저장된 컴퓨터 프로그램 | |
| JP5412305B2 (ja) | モデルベースの性能予測システム | |
| KR101629177B1 (ko) | 대용량 유동 데이터 가시화 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220818 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220818 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230630 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230810 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7332425 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |