JP7306840B2 - 測距装置を有する物体監視システム - Google Patents
測距装置を有する物体監視システム Download PDFInfo
- Publication number
- JP7306840B2 JP7306840B2 JP2019039071A JP2019039071A JP7306840B2 JP 7306840 B2 JP7306840 B2 JP 7306840B2 JP 2019039071 A JP2019039071 A JP 2019039071A JP 2019039071 A JP2019039071 A JP 2019039071A JP 7306840 B2 JP7306840 B2 JP 7306840B2
- Authority
- JP
- Japan
- Prior art keywords
- filter
- pixels
- monitoring system
- abnormality
- monitoring area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Description




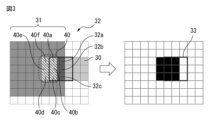
フィルタ判定確率を高めるため、方式1のフィルタ33は、時系列に生成したQ個の距離画像n、n-1、n-2にわたって監視領域内と判定した画素数の合計又は測距異常を示す画素数も含めた画素数の合計が、1以上でM×Q個未満であるL個以上かを判定する時間フィルタである点で、前述のものとは異なる。例えば図4に示すように、過去3回(時間フィルタ定数Q=3個)の距離画像n、n-1、n-2にわたって3×3のM=9×3=27個、N=4×3=12個の時間フィルタを適用した場合、フィルタ判定確率P1が0.957まで向上する。従って、物体検知の安定性が高まる。
さらにフィルタ判定確率を高めるため、方式2のフィルタ33は、時系列に生成したQ個の距離画像n、n-1、n-2にわたって1度でも監視領域内と判定した画素数又は測距異常を示す画素数も含めた画素数がN個以上かを判定する点で、前述のものとは異なる。例えば図4に示すように、過去3回の距離画像n、n-1、n-2にわたって3×3のM=9個、N=4個の時間フィルタを適用した場合、1画素の判定確率pが0.6から0.936へ向上するため、フィルタ判定確率P2が0.9999まで向上する。従って、物体検知の安定性がさらに高まる。
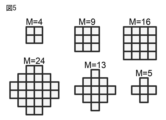
(1)フィルタ形状(フィルタサイズ:M、画素群の配置関係等。図5に一例を示す)
(2)フィルタ判定閾値:N、L
(3)測距異常を示す画素数を含めるか否か
(4)時間フィルタ定数:Q
(5)使用するフィルタの選択
(6)撮像モード(参照光の発光量、露光時間、絞り値等)
上記項目の設定により、物体検知サイズ、フィルタ判定確率等の調整が可能になるため、使用目的、設置環境等に応じたフレキシブルな物体検知が可能となる。

10 測距装置
11 入出力部
12 発光撮像制御部
13 照射部
14 受光部
15 A/D変換部
16 距離画像生成部
17 強度画像生成部
20 コンピュータ装置
21 入出力部
22 設定メモリ
23 フィルタ判定部
24 信号出力部
25 表示部
26 物体検知信号
30 物体
31 監視領域
32 距離画像
32a-32d 監視領域内と判定した画素
32e 測距異常を示す画素
33 フィルタ
34 強度画像
40 再帰反射材
40a-40f 測距異常を示す画素
50a-50b サチュレーションを示す画素
50c 露光不足を示す画素
Claims (9)
- 対象空間の距離画像を生成する測距装置と、前記対象空間の中に定めた監視領域内の物体有無を前記距離画像に基づき判断するコンピュータ装置と、を備える物体監視システムであって、
前記コンピュータ装置は、前記距離画像において、特定の配置関係にある第1個数の隣接画素群の中で、前記監視領域内と判定した画素数にサチュレーション、露光不足、画素故障及び精度異常の少なくとも1つである測距異常を示す画素数も含めた画素数が、1以上で前記第1個数未満である第2個数以上と判定された場合に、前記監視領域内に物体有りと判定するフィルタを備えることを特徴とする物体監視システム。 - 前記コンピュータ装置は、前記第1個数、前記第2個数、及び前記配置関係のうち少なくとも1つを設定する手段をさらに備える、請求項1に記載の物体監視システム。
- 前記コンピュータ装置は、時系列に生成した第3個数の前記距離画像にわたって前記隣接画素群の中で前記監視領域内と判定した画素数にサチュレーション、露光不足、画素故障及び精度異常の少なくとも1つである測距異常を示す画素数も含めた画素数の合計が、1以上で前記第1個数に前記第3個数を乗算した数未満である第4個数以上かを判定するフィルタをさらに備える、請求項1又は2に記載の物体監視システム。
- 前記コンピュータ装置は、前記第4個数を設定する手段をさらに備える、請求項3に記載の物体監視システム。
- 前記コンピュータ装置は、時系列に生成した第3個数の前記距離画像にわたって1度でも前記隣接画素群の中で前記監視領域内と判定した画素数にサチュレーション、露光不足、画素故障及び精度異常の少なくとも1つである測距異常を示す画素数も含めた画素数が前記第2個数以上かを判定するフィルタをさらに備える、請求項1から4のいずれか一項に記載の物体監視システム。
- 前記コンピュータ装置は、前記第3個数を設定する手段をさらに備える、請求項3から5のいずれか一項に記載の物体監視システム。
- 前記コンピュータ装置は、使用するフィルタ処理を選択する手段をさらに備える、請求項1から6のいずれか一項に記載の物体監視システム。
- 前記コンピュータ装置は、前記監視領域内に物体有りと判定した理由を通知する手段をさらに備える、請求項1から7のいずれか一項に記載の物体監視システム。
- 前記コンピュータ装置は、前記監視領域内か否か、サチュレーション、露光不足、画素故障及び精度異常の少なくとも1つである測距異常の種別、前記フィルタの判定結果、及び前記フィルタの判定理由のうち少なくとも1つの画素状況を前記対象空間の画像上に表示する手段をさらに備える、請求項1から8のいずれか一項に記載の物体監視システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019039071A JP7306840B2 (ja) | 2019-03-04 | 2019-03-04 | 測距装置を有する物体監視システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019039071A JP7306840B2 (ja) | 2019-03-04 | 2019-03-04 | 測距装置を有する物体監視システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020143941A JP2020143941A (ja) | 2020-09-10 |
| JP7306840B2 true JP7306840B2 (ja) | 2023-07-11 |
Family
ID=72353543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019039071A Active JP7306840B2 (ja) | 2019-03-04 | 2019-03-04 | 測距装置を有する物体監視システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7306840B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006099749A (ja) | 2004-08-31 | 2006-04-13 | Matsushita Electric Works Ltd | ジェスチャースイッチ |
| JP2014006727A (ja) | 2012-06-25 | 2014-01-16 | Omron Corp | モーションセンサ及び物体動作検知方法 |
| JP2014035304A (ja) | 2012-08-09 | 2014-02-24 | Sanyo Electric Co Ltd | 情報取得装置および物体検出装置 |
| JP2018087703A (ja) | 2016-11-28 | 2018-06-07 | パイオニア株式会社 | 制御装置、測定装置、およびコンピュータプログラム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5040116A (en) * | 1988-09-06 | 1991-08-13 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
-
2019
- 2019-03-04 JP JP2019039071A patent/JP7306840B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006099749A (ja) | 2004-08-31 | 2006-04-13 | Matsushita Electric Works Ltd | ジェスチャースイッチ |
| JP2014006727A (ja) | 2012-06-25 | 2014-01-16 | Omron Corp | モーションセンサ及び物体動作検知方法 |
| JP2014035304A (ja) | 2012-08-09 | 2014-02-24 | Sanyo Electric Co Ltd | 情報取得装置および物体検出装置 |
| JP2018087703A (ja) | 2016-11-28 | 2018-06-07 | パイオニア株式会社 | 制御装置、測定装置、およびコンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020143941A (ja) | 2020-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11769775B2 (en) | Distance-measuring imaging device, distance measuring method of distance-measuring imaging device, and solid-state imaging device | |
| US7697119B2 (en) | Range image generating apparatus | |
| JP4727388B2 (ja) | 侵入検知装置 | |
| CN109564382B (zh) | 拍摄装置以及拍摄方法 | |
| JP6773724B2 (ja) | 精度情報を出力する測距装置 | |
| JP4815190B2 (ja) | 侵入検知装置 | |
| US7161586B2 (en) | Method of operating an optical motion sensing device and optical motion sensing device implementing this method | |
| WO2019026457A1 (ja) | 画像監視装置、画像監視方法、画像監視プログラムおよび記録媒体 | |
| US10628951B2 (en) | Distance measurement system applicable to different reflecting surfaces and computer system | |
| JP6127558B2 (ja) | 撮像装置 | |
| JP7306840B2 (ja) | 測距装置を有する物体監視システム | |
| KR100717861B1 (ko) | 카메라 영상을 이용한 움직임 검출 방법 및 장치 | |
| WO2018034236A1 (ja) | ガス検知システム及びガス検知方法 | |
| JP2018159685A (ja) | 距離測定装置 | |
| CN112014858A (zh) | 修正测距异常的距离图像生成装置 | |
| JPWO2020021914A1 (ja) | 距離測定装置および信頼性判定方法 | |
| US20220180840A1 (en) | Information processing apparatus, information processing method, and storage medium | |
| US20200304739A1 (en) | Image processing device, image processing method and storage medium | |
| JP6912449B2 (ja) | 測距装置を有する物体監視システム | |
| US20230345142A1 (en) | Three-dimensional-measurement device and three-dimensional-measurement method | |
| WO2023181881A1 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| WO2022168903A1 (ja) | 異常検出装置、異常検出方法、及びプログラム | |
| US20230204522A1 (en) | Radiation imaging apparatus, image processing apparatus, operation method for radiation imaging apparatus, and non-transitory computer readable storage medium | |
| TWI797017B (zh) | 過熱預測系統、過熱預測方法以及非暫態電腦可讀取儲存媒體 | |
| US20240048684A1 (en) | Using multiple target distances to determine long-term quality and/or performance over a temperature range |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230306 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230629 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7306840 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |