JP7306840B2 - Object monitoring system with rangefinder - Google Patents
Object monitoring system with rangefinder Download PDFInfo
- Publication number
- JP7306840B2 JP7306840B2 JP2019039071A JP2019039071A JP7306840B2 JP 7306840 B2 JP7306840 B2 JP 7306840B2 JP 2019039071 A JP2019039071 A JP 2019039071A JP 2019039071 A JP2019039071 A JP 2019039071A JP 7306840 B2 JP7306840 B2 JP 7306840B2
- Authority
- JP
- Japan
- Prior art keywords
- filter
- pixels
- monitoring system
- abnormality
- monitoring area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Optical Radar Systems And Details Thereof (AREA)
Description
本発明は、測距装置を有する物体監視システムに関し、特に物体監視システムのフィルタ処理に関する。 The present invention relates to object monitoring systems with ranging devices, and more particularly to filtering of object monitoring systems.
物体までの距離を測定する測距装置として、光の飛行時間に基づき距離を出力するTOF(time of flight)カメラが知られている。TOFカメラは、所定周期で強度変調した参照光を対象空間に照射し、参照光と対象空間からの反射光との間の位相差に基づき対象空間の測距値を出力する位相差方式を採用するものが多い。TOFカメラの利用も想定された物体検知技術としては、下記の文献が公知である。 A TOF (time of flight) camera that outputs a distance based on the time of flight of light is known as a distance measuring device that measures the distance to an object. The TOF camera uses a phase difference method that irradiates the target space with reference light whose intensity is modulated at a predetermined cycle, and outputs the distance measurement value of the target space based on the phase difference between the reference light and the reflected light from the target space. There are many things to do. The following documents are well known as object detection techniques that also assume the use of TOF cameras.
特許文献1には、TOFカメラ等で撮像した検知エリアの撮像画像と、検知エリアの背景画像との背景差分画像を生成し、背景差分画像において前景画素をグルーピングし、前景画素の画素数がオブジェクト判定画素数以下の前景領域をノイズと判定することが記載されている。
In
TOFカメラの距離空間の中に定めた監視領域内の物体有無の判定を行う場合、TOFカメラの測距値にはバラツキがあるため、物体が監視領域の遠方面から僅かに侵入した状態では、監視領域内と判定される画素が離散的になることがある。また、TOFカメラは、サチュレーション、露光不足、イメージセンサの画素故障等といった測距異常を示す画素を発生させることもある。このような測距値のバラツキ、測距異常等を発生させる測距装置を用いて監視領域内の物体有無を判定する場合、判定安定化のために距離画像に対してフィルタ処理を行うことが想定される。 When judging the presence or absence of an object within the monitoring area defined in the range space of the TOF camera, the distance measurement value of the TOF camera varies. Pixels that are determined to be within the monitored area may be discrete. TOF cameras may also produce pixels that exhibit ranging anomalies such as saturation, underexposure, image sensor pixel failure, and the like. When determining the presence or absence of an object in a monitoring area using a rangefinder that generates such variations in range values and range measurement abnormalities, it is necessary to perform filter processing on the range image in order to stabilize the determination. is assumed.
しかし、従来の画像処理フィルタ、例えば収縮フィルタ、平均化フィルタ、中間値フィルタ等では、フィルタサイズに対して監視領域内と判定される画素数が少ない場合、監視領域内に物体有りと判定できないことがある。例えば収縮フィルタは、図11Aに示すように対象画素周辺の3×3の画素値が全て1のときに1を出力する。収縮フィルタで期待される一般的な効果は規定サイズ以下のノイズや細かな凹凸を削除することであるが、収縮フィルタを距離画像に適用して監視領域内の物体検知を行う場合、3×3の画素群の測距値が全て監視領域内に無いと、監視領域内に物体が侵入したと判定できない。 However, with conventional image processing filters such as contraction filters, averaging filters, median filters, etc., if the number of pixels determined to be within the monitoring area is small relative to the filter size, it cannot be determined that there is an object within the monitoring area. There is For example, the erosion filter outputs 1 when all 3×3 pixel values around the target pixel are 1, as shown in FIG. 11A. The general effect expected of an erosion filter is to remove noise and fine irregularities that are smaller than a specified size. If all the distance measurement values of the pixel group are not within the monitoring area, it cannot be determined that an object has entered the monitoring area.
また平均化フィルタは、図11Bに示すように対象画素周辺の3×3の画素値の平均値を出力する。平均化フィルタで期待される一般的な効果は急峻に変化する領域を滑らかにすることであるが、平均化フィルタを距離画像に適用して監視領域内の物体検知を行う場合、物体が背景の距離と平均化されてしまうと、監視領域内に物体が侵入したと判定できなくなる。 Also, the averaging filter outputs the average value of 3×3 pixel values around the target pixel as shown in FIG. 11B. The general effect expected with an averaging filter is to smooth areas that change sharply. If the distance is averaged, it cannot be determined that an object has entered the monitoring area.
さらに中間値フィルタは、図11Cに示すように対象画素周辺の3×3の画素値の中間値(例えば5番目の値)を出力する。中間値フィルタで期待される一般的な効果はスパイク的なノイズの除去であり、滑らかさは平均化フィルタと比べて若干劣るものの、エッジ部のぼけが抑えられる。中間値フィルタを距離画像に適用して監視領域内の物体検知を行う場合、3×3の画素群のうち5個以上の画素が監視領域内と判定されないと、監視領域内に物体が侵入したと判定できない。 Furthermore, the median filter outputs the median value (for example, the fifth value) of the 3×3 pixel values around the target pixel, as shown in FIG. 11C. The general effect expected with a median filter is the removal of spike-like noise, and while the smoothness is slightly inferior to that of an averaging filter, blurring of edges is suppressed. When detecting an object within a monitoring area by applying a median filter to a range image, if five or more pixels in a 3×3 pixel group are not determined to be within the monitoring area, the object has entered the monitoring area. cannot be determined.
そこで、測距値のバラツキ、測距異常等を発生させる測距装置を用いた物体監視システムにおいて、物体検知の安定性を高めたフィルタ処理が求められている。 Therefore, in an object monitoring system using a distance measuring device that causes variations in measured distance values, abnormal distance measurement, etc., there is a demand for filter processing that enhances the stability of object detection.
本開示の一態様は、対象空間の距離画像を生成する測距装置と、対象空間の中に定めた監視領域内の物体有無を距離画像に基づき判断するコンピュータ装置と、を備える物体監視システムであって、コンピュータ装置は、距離画像において、特定の配置関係にある第1個数の隣接画素群の中で、監視領域内と判定した画素数にサチュレーション、露光不足、画素故障及び精度異常の少なくとも1つである測距異常を示す画素数も含めた画素数が、1以上で第1個数未満である第2個数以上と判定された場合に、監視領域内に物体有りと判定するフィルタを備える、物体監視システムを提供する。 One aspect of the present disclosure is an object monitoring system that includes a distance measuring device that generates a range image of a target space, and a computer that determines the presence or absence of an object within a monitoring area defined in the target space based on the range image. In the distance image, the computer device determines that the number of pixels determined to be within the monitoring area among the first number of adjacent pixel groups having a specific arrangement relationship in the range image is at least one of saturation, underexposure, pixel failure, and accuracy abnormality. a filter that determines that there is an object in the monitoring area when the number of pixels including the number of pixels indicating a ranging abnormality is determined to be equal to or greater than a second number, which is equal to or greater than 1 and less than a first number, An object monitoring system is provided.
本開示の一態様によれば、従来の画像処理フィルタでは物体検知が難しい場合でも物体検知が可能になる。また、測距異常の画素があっても本開示のフィルタのみで判定を継続できる。 According to one aspect of the present disclosure, object detection becomes possible even when object detection is difficult with a conventional image processing filter. Moreover, even if there is a pixel with an abnormality in ranging, determination can be continued only with the filter of the present disclosure.
以下、添付図面を参照して本開示の実施形態を詳細に説明する。各図面において、同一又は類似の構成要素には同一又は類似の符号が付与されている。また、以下に記載する実施形態は、特許請求の範囲に記載される発明の技術的範囲及び用語の意義を限定するものではない。 Hereinafter, embodiments of the present disclosure will be described in detail with reference to the accompanying drawings. In each drawing, the same or similar components are given the same or similar reference numerals. Moreover, the embodiments described below do not limit the technical scope of the invention described in the claims and the meaning of the terms.
図1は本実施形態における物体監視システム1のブロック図である。物体監視システム1は、測距装置10及びコンピュータ装置20を備えている。測距装置10及びコンピュータ装置20は、有線又は無線のネットワークを介して相互に通信可能に接続されるか、又は、バス接続等により一体化して構成されてもよい。
FIG. 1 is a block diagram of an
測距装置10は、TOFカメラ、レーザスキャナ等で構成され、対象空間の距離画像を順次生成する。測距装置10は、入出力部11、発光撮像制御部12、照射部13、受光部14、A/D変換部15、及び距離画像生成部16を備えている。入出力部11は、種々の設定値等の入力、距離画像や強度画像等の出力等を行う。発光撮像制御部12は、入力した設定値に基づき照射部13の発光及び受光部14の撮像を制御する。
The
照射部13は、強度変調した参照光を発光する光源、参照光を対象空間に照射するための拡散板やMEMSミラー等のスキャナ機構等を備えている。受光部14は、対象空間からの反射光を集光する集光レンズ、特定波長の反射光のみを透過する光学フィルタ、反射光を受光する受光素子等を備えている。受光部14は、参照光の発光タイミングに対し、例えば0°、90°、180°、270°だけ位相をずらした4種類の露光タイミングで受光を繰返し、位相毎に電荷量Q1-Q4を蓄積していく。
The
A/D変換部15は、蓄積した電荷量Q1-Q4を増幅してA/D変換し二値化した値で出力する。また増幅した際に飽和を検出した場合には、これを示す値(ビット)を出力する。
The A/
距離画像生成部16は、電荷量Q1-Q4に基づいて参照光と反射光との位相差を画素毎に求め、各画素の位相差から測距値を算出して距離画像を生成する。位相差Td及び測距値Lの算出式の一例を下記に示す。下記式において、cは光速であり、fは参照光の変調周波数である。
The distance


また距離画像生成部16は、電荷量Q1-Q4に基づいて、A/D変換部15の出力に電荷量の飽和が検出されている場合、一般にサチュレーション発生と判断し、測距値として特異値(例えば9999)を出力することもできる。また、距離画像生成部16は、電荷量Q1-Q4のいずれもが規定値より小さいと判断される場合には、露光不足と判断し、測距値として特異値(例えば9998)を出力することもできる。
Further, based on the charge amount Q 1 -Q 4 , the distance
距離画像生成部16は、電荷量Q1-Q4のいずれも同じ値である場合、画素故障発生と判断し、測距値として特異値(例えば9997)を出力することもできる。また、電荷量Q1、Q3の和と電荷量Q2、Q4の和との差分をスケール調整して求めた精度情報が所定閾値を超える場合には、精度異常と判断し、特異値(例えば9996)を出力することもできる。精度情報の詳細については特願2018-112665号を参照されたい。なお、他の実施形態において、これら異常の検出や特異値への置換動作については、電荷量Q1-Q4のA/D変換値をコンピュータ装置20へ送信し、コンピュータ装置20側で判定してもよい。
The
測距装置10はさらに、強度画像生成部17を備えていてもよい。強度画像生成部17は、距離画像内の各画素について電荷量Q1-Q4の関係に基づき受光強度Iを算出し、距離画像に対応した強度画像を順次生成する。受光強度Iの算出式の一例を下記に示す。
The

コンピュータ装置20は、CPU(central processing unit)、RAM(random access memory)、ASIC(application specific integrated circuit)、FPGA(field-programmable gate array)等で構成され、対象空間の中に定めた監視領域内の物体有無を距離画像に基づき判断する。コンピュータ装置20は、入出力部21、設定メモリ22、フィルタ判定部23、信号出力部24、及び表示部25を備えている。
The
入出力部21は、距離画像、強度画像等の入力、種々の設定値の出力等を行う。設定メモリ22は、監視領域データ、種々のフィルタ設定値、撮像モード等を記憶している。監視領域データは、測距装置10の対象空間における三次元位置として設定され、距離画像の各画素が眺望する監視領域の距離範囲テーブルに変換されて記憶される。フィルタ設定値は、監視領域内の物体有無を判定するフィルタに関する設定値であり、例えばフィルタ形状、判定閾値、後述する他の設定値を含む。撮像モードは、測距装置の発光撮像に関する設定値であり、例えば参照光の発光量、露光時間、絞り値等を含む。
The input/
フィルタ判定部23は、距離画像をフィルタ処理して監視領域内の物体有無を判定する。本例のフィルタは、特定の配置関係にあるM個(Mは整数)の隣接画素群の中で、監視領域内と判定した画素数が、1以上でM個未満であるN個以上(Nは整数)と判定された場合に、監視領域内に物体有りと判定する。
A
信号出力部24は、監視領域内に物体有りとフィルタ判定された場合に、物体検知信号26を外部へ出力する。物体検知信号26は、例えば監視領域に侵入した作業者の安全を確保するため、作業者から隔離するロボット、工作機械等の危険源の動力停止信号として使用される。
A
表示部26は、種々の設定画面、距離画像、強度画像等を表示する。後述するが、本例の表示部26は、距離画像、強度画像等の対象空間の画像上に、監視領域内か否か、測距異常の種別、フィルタの判定結果等の画素状況を重ねた画像を表示する。
The
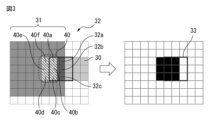
図2はフィルタ処理の具体例を説明する距離画像の状態を示す図である。画素領域31は、設定された監視領域を眺望する画素であることを示し、これら画素の測距値が距離範囲テーブルの範囲内である場合には、監視領域内と判定される。図2では、物体30の一部が監視領域に侵入した場合を想定している。なお、距離画像32は、画素領域31内において監視領域内と判定した4つの画素32a-32dと、測距異常を示す1つの画素32eと、を含んでいる。理解を容易にするため、図2は距離画像32の一部のみを示し、また物体30は距離画像32上で表現していることに留意されたい。
FIG. 2 is a diagram showing the state of a distance image for explaining a specific example of filtering. A
本例のフィルタ33は、3×3のM=9個の隣接画素群の中で、監視領域31内に侵入したと判定した画素数がN=4個以上と判定された場合に、監視領域31内に物体有りと判定する。一般にフィルタ処理は、注目画素を隣接画素群の中心部の画素位置とし、注目画素を含む隣接画素群の値を用いて判定を行う。フィルタ33を距離画像32に適用し、監視領域31内に物体有りと判定される注目画素が1画素でもあった場合には、物体検知信号が出力される。例えば図2に示すように、対象画素32a-32dの4つの画素を夫々注目画素とした場合には、いずれも監視領域31内と判定した画素数が4個以上となるため、監視領域31内に物体有りと判定される(図2の右側にフィルタ判定結果を示す。)。距離画像32内に測距異常を示す画素32eがあっても同様のフィルタ判定結果が得られるため、本例のフィルタ33のみで判定を継続できる。
The
対照的に、従来の画像処理フィルタ、例えば収縮フィルタ、中間値フィルタでは、監視領域31内と判定した画素数がフィルタ内に9個又は5個以上ないため、実際には監視領域31内に物体30が侵入していても物体検知できない。また平均化フィルタの場合も対象画素32a-32d以外の周辺画素の測距値が平均値計算上支配的になるため、物体検知できない可能性が高い。従って、本例のフィルタ33によれば、従来の画像処理フィルタでは物体検知が難しい場合でも物体検知が可能になる。
In contrast, in conventional image processing filters, such as erosion filters and median filters, the number of pixels determined to be within the
図3はフィルタ処理の変形例を説明する図である。図3では、再帰反射材40が物体30の先端の一部に付いている場合を想定している。再帰反射材40によってサチュレーションが発生するため、距離画像32は、監視領域31内と判定した3つの画素32a-32cに加えて、測距異常を示す6つの画素40a-40fも含んでいる。
FIG. 3 is a diagram for explaining a modified example of filtering. In FIG. 3, it is assumed that the
本例のフィルタ33は、監視領域31内と判定した画素数に、サチュレーション等の測距異常を示す画素数も含めた画素数がN=4個以上かを判定する点で、前述のフィルタとは異なる。監視領域31内と判定した3つの画素32a-32c、及び、測距異常を示す6つの画素40a-40fの計9つの画素を夫々注目画素とした場合には、いずれも監視領域31内と判定した画素数に、サチュレーション等の測距異常を示す画素数も含めた画素数が4個以上あるため、監視領域31内に物体有りと判定される(図3の右側にフィルタ判定結果を示す。)。
The
対照的に、測距異常の画素数を含めないフィルタでは、監視領域31内と判定した画素数が3個しかないため、フィルタ判定閾値がN=4個の場合には監視領域31内に物体有りと判定できない。このように測距異常を示す画素数も含めてフィルタ判定を行うことにより、今回例示したような先端部に再帰反射材が付いている物体をよりいち早く、また、より安全サイドに判定することが可能になる。
In contrast, with the filter that does not include the number of pixels with abnormal ranging, the number of pixels determined to be within the
図8は約2m先の物体を眺望する画素が出力した測距値のバラツキを示している。ショットノイズ、暗電流ノイズ、熱雑音等の不可避なランダムノイズの影響を受けるため、TOFカメラの各画素の測距値のバラツキは正規分布的に分布することが知られている。これは、物体が監視領域の遠方面上に丁度ある場合、これを眺望する各画素は、監視領域内と判定する判定確率がほぼ0.5であることを意味する。図9は平均がμで偏差σのバラツキを持つ測距値の正規分布及びその累積分布確率F(x)を示している。μが監視領域の遠方面の距離とした場合、判定確率に対応する累積分布確率F(x)は0.5であり、物体が監視領域の遠方面より侵入している距離が大きくなるほど、判定確率に対応する累積分布確率F(x)は大きくなる。 FIG. 8 shows variations in distance measurement values output by pixels viewing an object about 2 m away. It is known that the dispersion of the distance measurement value of each pixel of the TOF camera is distributed like a normal distribution because it is affected by unavoidable random noise such as shot noise, dark current noise, and thermal noise. This means that when an object is exactly on the far side of the monitored area, the determination probability of determining that each pixel viewing the object is within the monitored area is approximately 0.5. FIG. 9 shows a normal distribution of measured distance values having an average μ and deviation σ and its cumulative distribution probability F(x). When μ is the distance in the far plane of the monitoring area, the cumulative distribution probability F(x) corresponding to the determination probability is 0.5. The cumulative distribution probability F(x) corresponding to the probability increases.
図4はフィルタ処理の他の変形例を説明する図である。図9に示しているが、仮に測距値が偏差σのバラツキを持ち、物体が監視領域の遠方面から0.25σに相当する距離分侵入していると、物体を眺望する各画素が監視領域内と判定する判定確率は0.6となる。従って各距離画像において、監視領域内と判定する画素の状況は、図4に示すように離散的になる。この状況下において、3×3のM=9個、N=4個のフィルタを適用した場合のフィルタ処理後のフィルタ判定確率を考える。物体を眺望する各画素が監視領域内と判定される判定確率をpとし、フィルタ処理後のフィルタ判定確率をPとした場合、フィルタ判定確率Pは、判定確率pの試行をM回行ってN回以上成功する確率を計算する下記の二項分布の式から求められ、フィルタ判定確率Pは0.733となる。 FIG. 4 is a diagram for explaining another modified example of filtering. As shown in FIG. 9, if the measured distance values have a deviation of σ and an object is intruding from the far side of the monitoring area by a distance corresponding to 0.25σ, each pixel viewing the object is monitored. The determination probability of determination as being in the area is 0.6. Accordingly, in each distance image, the states of pixels determined to be within the monitoring area are discrete as shown in FIG. Consider the filter decision probability after filtering when 3×3=M=9 and N=4 filters are applied under this situation. Let p be the determination probability that each pixel viewing an object is determined to be within the monitoring area, and let P be the filter determination probability after filtering. The filter determination probability P is 0.733, which is obtained from the following binomial distribution formula for calculating the probability of success at least once.

<方式1>
フィルタ判定確率を高めるため、方式1のフィルタ33は、時系列に生成したQ個の距離画像n、n-1、n-2にわたって監視領域内と判定した画素数の合計又は測距異常を示す画素数も含めた画素数の合計が、1以上でM×Q個未満であるL個以上かを判定する時間フィルタである点で、前述のものとは異なる。例えば図4に示すように、過去3回(時間フィルタ定数Q=3個)の距離画像n、n-1、n-2にわたって3×3のM=9×3=27個、N=4×3=12個の時間フィルタを適用した場合、フィルタ判定確率P1が0.957まで向上する。従って、物体検知の安定性が高まる。
<
In order to increase the filter determination probability, the
<方式2>
さらにフィルタ判定確率を高めるため、方式2のフィルタ33は、時系列に生成したQ個の距離画像n、n-1、n-2にわたって1度でも監視領域内と判定した画素数又は測距異常を示す画素数も含めた画素数がN個以上かを判定する点で、前述のものとは異なる。例えば図4に示すように、過去3回の距離画像n、n-1、n-2にわたって3×3のM=9個、N=4個の時間フィルタを適用した場合、1画素の判定確率pが0.6から0.936へ向上するため、フィルタ判定確率P2が0.9999まで向上する。従って、物体検知の安定性がさらに高まる。
<
In order to further increase the filter determination probability, the
判定確率の向上度は、フィルタ処理する距離画像が多い程高くなる。因みに、時間フィルタ定数Q=10個の場合、フィルタ判定確率P1は0.997まで向上し、フィルタ判定確率P2は1-1.6E-18まで向上する。 The degree of improvement in determination probability increases as the number of distance images to be filtered increases. Incidentally, when the time filter constant Q=10, the filter decision probability P1 improves to 0.997, and the filter decision probability P2 improves to 1-1.6E-18.
前述のフィルタに応じて、コンピュータ装置20は下記項目の少なくとも1つを設定する手段を備えているとよい。設定手段としては、設定ソフトウェア、設定ボタン等がある。
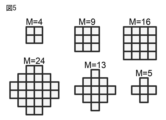
(1)フィルタ形状(フィルタサイズ:M、画素群の配置関係等。図5に一例を示す)
(2)フィルタ判定閾値:N、L
(3)測距異常を示す画素数を含めるか否か
(4)時間フィルタ定数:Q
(5)使用するフィルタの選択
(6)撮像モード(参照光の発光量、露光時間、絞り値等)
上記項目の設定により、物体検知サイズ、フィルタ判定確率等の調整が可能になるため、使用目的、設置環境等に応じたフレキシブルな物体検知が可能となる。
Depending on the aforementioned filters, the
(1) Filter shape (filter size: M, layout relationship of pixel groups, etc. An example is shown in FIG. 5)
(2) Filter decision threshold: N, L
(3) Whether or not to include the number of pixels indicating a ranging error (4) Time filter constant: Q
(5) Selection of filter to be used (6) Imaging mode (emission amount of reference light, exposure time, aperture value, etc.)
By setting the above items, it is possible to adjust the object detection size, filter determination probability, etc., so flexible object detection according to the purpose of use, installation environment, etc. is possible.
またコンピュータ装置20は、測距異常を示す画素数を含めてフィルタ判定を行う場合、監視領域内に物体有りと判定した理由としては、物体の侵入と測距異常、さらにこの測距異常は、サチュレーション、露光不足、画素故障、精度異常等と複数に分類される場合もあり、監視領域内に物体有りと判定した判定理由を通知する手段を備えるとよい。通知手段としては、通知メール、通知音、通知ランプ等がある。
Further, when the
図6はフィルタの判定理由の選定アルゴリズムを説明する図である。フィルタ処理において判定理由を選定するアルゴリズムとしては、フィルタ内で最も多く見られる種別を選定する方法がある。種別としては、侵入、サチュレーション、露光不足、画素故障、精度異常等がある。図6では、距離画像が、監視領域内と判定した3つの画素32a-32cと、サチュレーションを示す2つの画素50a-50bと、露光不足を示す1つの画素50cと、を含んでいる場合を想定している。測距異常を示す画素数も含めるフィルタ33を注目画素32bに適用して監視領域内に物体有りと判定された場合、フィルタ内で最も多い種別が「侵入」であるため、フィルタ33の判定理由は「侵入」が選定される。また、注目画素からの距離が遠い程小さくなる重みを加味した加重平均の高い理由を選定する方法や、判定理由に優先順位を付けておき、最も高い優先順位の理由を選定する方法もある。
FIG. 6 is a diagram for explaining an algorithm for selecting reasons for filter determination. As an algorithm for selecting the reason for determination in the filtering process, there is a method of selecting the most frequently seen type in the filter. The types include intrusion, saturation, underexposure, pixel failure, and precision abnormality. In FIG. 6, it is assumed that the range image includes three
一方、物体監視システムとして監視領域内に物体有りと判定した理由は、フィルタ判定が物体有りと判定した同一の距離画像の全てのフィルタ判定の理由を対象とするのが一般である。従って、各フィルタ処理のフィルタ判定の理由は複数になる場合や、さらにそれらの種別が異なる場合がある。 On the other hand, the reason for determining that there is an object in the monitoring area of the object monitoring system is generally the reason for all the filter determinations of the same range image in which the filter determination determined that there is an object. Therefore, there are cases where there are multiple reasons for filter determination in each filter process, and there are cases where the types of the reasons are different.
また、注目画素毎にフィルタ判定の理由が複数で異なる場合、主たる理由を選定して通知する方が、ユーザには使い勝手が良い場合もある。物体監視システムとして監視領域内に物体有りと判定した主たる判定理由を選定するアルゴリズムとしては、最も多い判定理由を選定する方法や、判定理由に優先順位を付けておき、最も高い優先順位の判定理由を選定する方法等がある。一例として「侵入」を優先順位の最高位にしておくことで、例えば再帰反射材の付いた物体が侵入し、サチュレーションと判定したフィルタが3つ、物体侵入と判定したフィルタが1つであった場合も、「侵入」を監視領域内に物体有りと判定した主たる判定理由として通知することになり、ユーザに対して、より現実的な理由の選択が可能になる。 Further, when there are a plurality of different reasons for filter determination for each pixel of interest, it may be easier for the user to select and notify the main reason. As an algorithm for selecting the main reason for determining that there is an object in the monitored area as an object monitoring system, there is a method of selecting the most common reason for determination, or a method of prioritizing the reasons for determination and determining the reason for determination with the highest priority. There is a method of selecting . As an example, by setting "intrusion" to the highest priority, for example, an object with a retroreflective material entered, three filters judged saturation, and one filter judged object intrusion. In this case as well, "intrusion" is notified as the main reason for determining that there is an object in the monitored area, allowing the user to select a more realistic reason.
さらにコンピュータ装置20は、監視領域内か否か(未侵入、侵入)、測距異常の種別(サチュレーション、露光不足、画素故障、精度異常等)、フィルタの判定結果、及びフィルタの判定理由のうち少なくとも1つの画素状況を対象空間の画像上に重ねて表示する手段を備えていてもよい。表示手段としては、液晶ディスプレイ等がある。図7は、対象空間の強度画像34上に画素状況を重ねた画像を示している。このような画素状況を重ねた画像は、物体監視システムを設置した時の初期の画像状況、改善処置の効果、監視領域への物体侵入検知のテスト等の確認を効果的に行うことができ、さらには物体検知した際の原因究明にも役立つ。
Further, the
本開示のフィルタは、測距値のバラツキを低減するのと等価な効果を有している。図8に示す正規分布的に分布する測距値のバラツキの幅は統計学的に偏差σで表せるが、測距装置としては、この偏差σが小さい方が良いことは言うまでもない。図9は平均がμで偏差σのバラツキを持つ測距値の正規分布及びその累積分布確率F(x)を示している。監視領域の遠方面の距離がμとして、物体が監視領域の遠方面上に丁度ある場合、これを眺望する画素の測距値に対する判定閾値xにμを適用した場合には、μ以下と判定される判定確率が0.5であることを示している。同様に、判定閾値xにμ-σを適用した場合にはμ-σ以下と判定される判定確率は0.16となり、判定閾値xにμ+σを適用した場合にはμ+σ以下と判定される判定確率は0.84となる。即ち判定確率が0.16から0.84となる判定確率の幅は2σとなる。 The filter of the present disclosure has an effect equivalent to reducing variations in distance measurement values. The range of variation in the measured distance values distributed in the normal distribution shown in FIG. 8 can be statistically represented by the deviation σ. Needless to say, the smaller the deviation σ, the better for the distance measuring device. FIG. 9 shows a normal distribution of measured distance values having an average μ and deviation σ and its cumulative distribution probability F(x). Assuming that the distance in the far plane of the monitoring area is μ, when an object is exactly on the far side of the monitoring area and μ is applied to the judgment threshold value x for the distance measurement value of the pixels viewing this, it is judged as μ or less. This indicates that the probability of determination to be made is 0.5. Similarly, when μ-σ is applied to the determination threshold x, the determination probability of being determined to be μ-σ or less is 0.16, and when μ+σ is applied to the determination threshold x, the determination is determined to be μ+σ or less. The probability is 0.84. That is, the range of determination probabilities from 0.16 to 0.84 is 2σ.
本開示のフィルタによる測距バラツキの低減効果を考えるに当たって、一例としてM=9個のフィルタとし、9個の対象画素は同じ距離にある物体を測距し、同じバラツキ分布特性:累積分布確率F(x)を持ち、同じ判定閾値xで判定されるものとする。このときN=1からN=8の夫々の場合において、適用する判定閾値xとその時のフィルタ判定確率Pは、下記の二項分布の式で求められる。 In considering the effect of reducing the distance measurement variation by the filter of the present disclosure, as an example, M = 9 filters, nine target pixels measure the distance of an object at the same distance, and the same variation distribution characteristic: cumulative distribution probability F (x) and determined with the same determination threshold value x. At this time, in each case of N=1 to N=8, the determination threshold value x to be applied and the filter determination probability P at that time are obtained by the following binomial distribution formula.

図10は判定閾値xと本開示のフィルタの判定確率の関係を、夫々のNに対して追加したものである。個々の画素の累積分布確率F(x)のグラフに対し、N=1からN=7のフィルタ判定確率の立ち上がりは急峻になることが分かる。さらに、各グラフについて前述の判定確率0.16、判定確率0.84、さらに判定確率0.5となる判定確率xを纏めたものが下記の表である。表には、急峻さの指標として、判定確率0.16と0.84となる判定確率の差、及び、単画素と比較した偏差σの比率が加えられている。 FIG. 10 adds the relationship between the decision threshold x and the decision probability of the filter of the present disclosure for each N. In FIG. From the graph of the cumulative distribution probability F(x) of individual pixels, it can be seen that the rising edge of the filter decision probability for N=1 to N=7 becomes steep. Furthermore, the following table summarizes the above-mentioned determination probability x of 0.16, the determination probability of 0.84, and the determination probability of 0.5 for each graph. In the table, the difference between the determination probabilities of 0.16 and 0.84 and the ratio of the deviation σ compared with a single pixel are added as steepness indices.
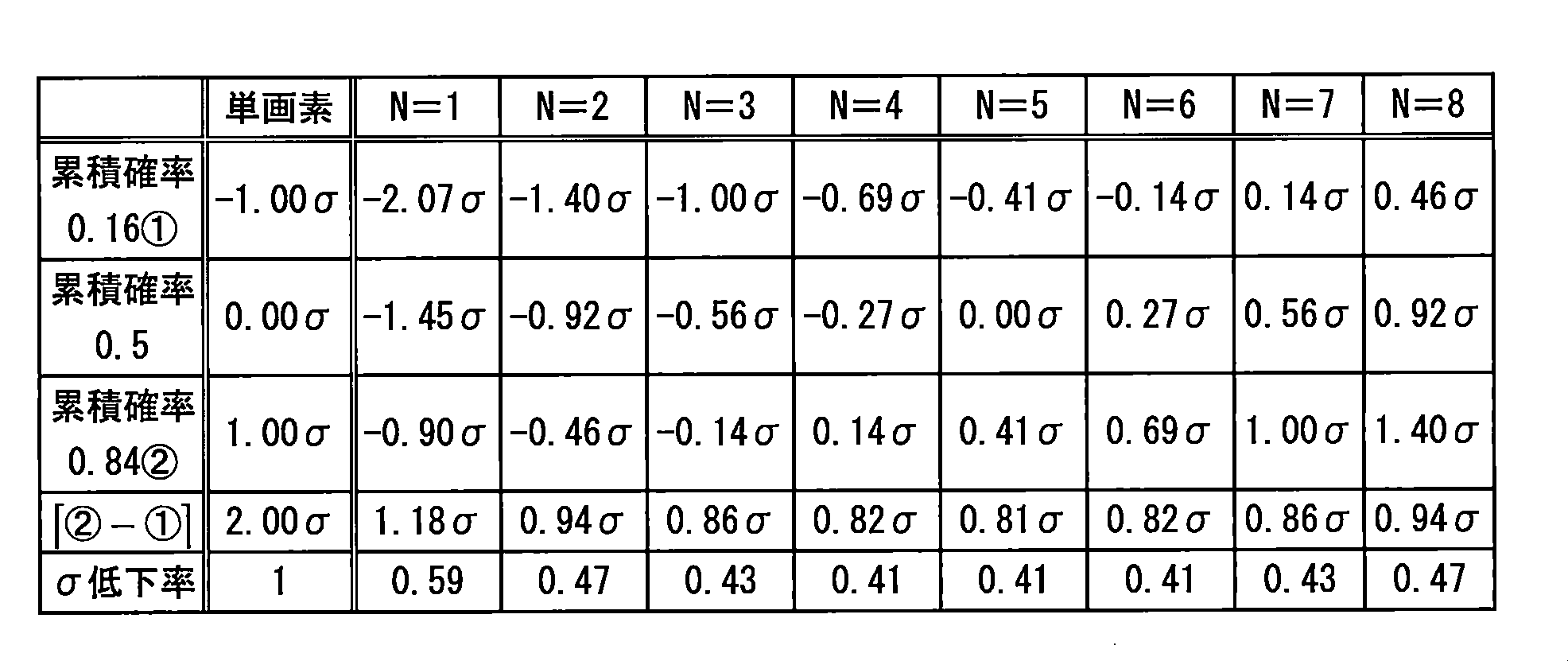
いずれのNであっても、判定確率が0.16から0.84となる判定閾値の幅は1σ前後であり、本開示のフィルタが単画素の測距値のバラツキを半分程度に低減したのと等価的な効果を有することが分かる。 For any N, the width of the determination threshold at which the determination probability becomes 0.16 to 0.84 is around 1σ, and the filter of the present disclosure reduces the variation in the distance measurement value of a single pixel to about half. It can be seen that it has an effect equivalent to
前述のコンピュータ装置20の構成要素は、CPU等で実行されるプログラムとして構成してもよい。斯かるプログラムは、コンピュータ読取り可能な非一時的記録媒体、例えばCD-ROM等に記録して提供できる。
The components of the
本明細書において種々の実施形態について説明したが、本発明は、前述の実施形態に限定されるものではなく、以下の特許請求の範囲に記載された範囲内において種々の変更を行えることを認識されたい。 Although various embodiments have been described herein, it is recognized that the present invention is not limited to the embodiments described above and that various modifications can be made within the scope of the following claims. want to be
1 物体監視システム
10 測距装置
11 入出力部
12 発光撮像制御部
13 照射部
14 受光部
15 A/D変換部
16 距離画像生成部
17 強度画像生成部
20 コンピュータ装置
21 入出力部
22 設定メモリ
23 フィルタ判定部
24 信号出力部
25 表示部
26 物体検知信号
30 物体
31 監視領域
32 距離画像
32a-32d 監視領域内と判定した画素
32e 測距異常を示す画素
33 フィルタ
34 強度画像
40 再帰反射材
40a-40f 測距異常を示す画素
50a-50b サチュレーションを示す画素
50c 露光不足を示す画素
Claims (9)
前記コンピュータ装置は、前記距離画像において、特定の配置関係にある第1個数の隣接画素群の中で、前記監視領域内と判定した画素数にサチュレーション、露光不足、画素故障及び精度異常の少なくとも1つである測距異常を示す画素数も含めた画素数が、1以上で前記第1個数未満である第2個数以上と判定された場合に、前記監視領域内に物体有りと判定するフィルタを備えることを特徴とする物体監視システム。 An object monitoring system comprising: a distance measuring device that generates a range image of a target space; and a computer that determines the presence or absence of an object within a monitoring area defined in the target space based on the range image,
In the distance image, the computer device determines that the number of pixels determined to be within the monitoring area, among the first number of adjacent pixel groups having a specific arrangement relationship , is at least one of saturation, underexposure, pixel failure, and accuracy abnormality. A filter for determining that there is an object in the monitoring area when the number of pixels including the number of pixels indicating a ranging abnormality is determined to be equal to or greater than a second number that is equal to or greater than 1 and less than the first number. An object monitoring system, comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019039071A JP7306840B2 (en) | 2019-03-04 | 2019-03-04 | Object monitoring system with rangefinder |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019039071A JP7306840B2 (en) | 2019-03-04 | 2019-03-04 | Object monitoring system with rangefinder |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020143941A JP2020143941A (en) | 2020-09-10 |
| JP7306840B2 true JP7306840B2 (en) | 2023-07-11 |
Family
ID=72353543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019039071A Active JP7306840B2 (en) | 2019-03-04 | 2019-03-04 | Object monitoring system with rangefinder |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7306840B2 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006099749A (en) | 2004-08-31 | 2006-04-13 | Matsushita Electric Works Ltd | Gesture switch |
| JP2014006727A (en) | 2012-06-25 | 2014-01-16 | Omron Corp | Motion sensor and object action detection method |
| JP2014035304A (en) | 2012-08-09 | 2014-02-24 | Sanyo Electric Co Ltd | Information acquisition device and object detection apparatus |
| JP2018087703A (en) | 2016-11-28 | 2018-06-07 | パイオニア株式会社 | Control device, measurement device, and computer pogram |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5040116A (en) * | 1988-09-06 | 1991-08-13 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
-
2019
- 2019-03-04 JP JP2019039071A patent/JP7306840B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006099749A (en) | 2004-08-31 | 2006-04-13 | Matsushita Electric Works Ltd | Gesture switch |
| JP2014006727A (en) | 2012-06-25 | 2014-01-16 | Omron Corp | Motion sensor and object action detection method |
| JP2014035304A (en) | 2012-08-09 | 2014-02-24 | Sanyo Electric Co Ltd | Information acquisition device and object detection apparatus |
| JP2018087703A (en) | 2016-11-28 | 2018-06-07 | パイオニア株式会社 | Control device, measurement device, and computer pogram |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020143941A (en) | 2020-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210118926A1 (en) | Distance-measuring imaging device, distance measuring method of distance-measuring imaging device, and solid-state imaging device | |
| US7697119B2 (en) | Range image generating apparatus | |
| JP4727388B2 (en) | Intrusion detection device | |
| CN109564382B (en) | Imaging device and imaging method | |
| US20190383906A1 (en) | Distance-measuring apparatus that outputs precision information | |
| JP4815190B2 (en) | Intrusion detection device | |
| US20110050914A1 (en) | Image processing apparatus and image processing method, and computer-readable storage medium storing image processing program | |
| US7161586B2 (en) | Method of operating an optical motion sensing device and optical motion sensing device implementing this method | |
| JP6127558B2 (en) | Imaging device | |
| WO2019026457A1 (en) | Image monitoring device, image monitoring method, image monitoring program, and recording medium | |
| US10628951B2 (en) | Distance measurement system applicable to different reflecting surfaces and computer system | |
| CN112014858A (en) | Distance image generating device for correcting distance measurement abnormality | |
| JP7306840B2 (en) | Object monitoring system with rangefinder | |
| KR100717861B1 (en) | Method and apparatus for detecting motion using camera | |
| JPWO2020021914A1 (en) | Distance measuring device and reliability judgment method | |
| WO2018034236A1 (en) | Gas detection system and gas detection method | |
| JP2018159685A (en) | Distance measuring device | |
| US11039096B2 (en) | Image processing device, image processing method and storage medium | |
| US11735140B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| CN111343418B (en) | Object monitoring system with distance measuring device | |
| CN113614566B (en) | Distance measuring method, distance measuring device, and program recording medium | |
| US20230345142A1 (en) | Three-dimensional-measurement device and three-dimensional-measurement method | |
| WO2023181881A1 (en) | Information processing device, information processing method, and program | |
| WO2022168903A1 (en) | Abnormality detection device, abnormality detection method, and program | |
| US20230204522A1 (en) | Radiation imaging apparatus, image processing apparatus, operation method for radiation imaging apparatus, and non-transitory computer readable storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230306 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230629 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7306840 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |