JP7304780B2 - 眼科装置 - Google Patents
眼科装置 Download PDFInfo
- Publication number
- JP7304780B2 JP7304780B2 JP2019165944A JP2019165944A JP7304780B2 JP 7304780 B2 JP7304780 B2 JP 7304780B2 JP 2019165944 A JP2019165944 A JP 2019165944A JP 2019165944 A JP2019165944 A JP 2019165944A JP 7304780 B2 JP7304780 B2 JP 7304780B2
- Authority
- JP
- Japan
- Prior art keywords
- eye
- optical axis
- unit
- tilt angle
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/12—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for looking at the eye fundus, e.g. ophthalmoscopes
- A61B3/1225—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for looking at the eye fundus, e.g. ophthalmoscopes using coherent radiation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/102—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for optical coherence tomography [OCT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0016—Operational features thereof
- A61B3/0025—Operational features thereof characterised by electronic signal processing, e.g. eye models
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0016—Operational features thereof
- A61B3/0041—Operational features thereof characterised by display arrangements
- A61B3/0058—Operational features thereof characterised by display arrangements for multiple images
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0083—Apparatus for testing the eyes; Instruments for examining the eyes provided with means for patient positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/14—Arrangements specially adapted for eye photography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/14—Arrangements specially adapted for eye photography
- A61B3/15—Arrangements specially adapted for eye photography with means for aligning, spacing or blocking spurious reflection ; with means for relaxing
- A61B3/152—Arrangements specially adapted for eye photography with means for aligning, spacing or blocking spurious reflection ; with means for relaxing for aligning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/1005—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for measuring distances inside the eye, e.g. thickness of the cornea
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/103—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for determining refraction, e.g. refractometers, skiascopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/107—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for determining the shape or measuring the curvature of the cornea
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Ophthalmology & Optometry (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Signal Processing (AREA)
- Eye Examination Apparatus (AREA)
Description
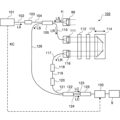
図1に、実施形態に係る眼科装置の光学系の構成例を示す。実施形態に係る眼科装置1000は、被検眼Eを観察するための光学系と、被検眼Eを検査するための光学系と、これらの光学系の光路を波長分離するダイクロイックミラーとを含む。被検眼Eを観察するための光学系として、前眼部観察(撮影)系5が設けられている。被検眼Eを検査するための光学系としてOCT光学系やレフ測定光学系(屈折力測定光学系)などが設けられている。
前眼部観察系5は、被検眼Eの前眼部を動画撮影する。前眼部観察系5を経由する光学系において、撮像素子59の撮像面は瞳孔共役位置に配置されている。前眼部照明光源50は、被検眼Eの前眼部に照明光(例えば、赤外光)を照射する。被検眼Eの前眼部により反射された光は、対物レンズ51を通過し、ダイクロイックミラー52を透過し、絞り(テレセン絞り)53に形成された孔部を通過し、ハーフミラー23を透過し、リレーレンズ55及び56を通過し、ダイクロイックミラー76を透過する。ダイクロイックミラー52は、レフ測定光学系の光路と前眼部観察系5の光路とを合成(分離)する。ダイクロイックミラー52は、これらの光路を合成する光路合成面が対物レンズ51の光軸に対して傾斜して配置される。ダイクロイックミラー76を透過した光は、結像レンズ58により撮像素子59(エリアセンサー)の撮像面に結像される。撮像素子59は、所定のレートで撮像及び信号出力を行う。撮像素子59の出力(映像信号)は、後述の処理部9に入力される。処理部9は、この映像信号に基づく前眼部像E´を後述の表示部10の表示画面10aに表示させる。前眼部像E´は、例えば赤外動画像である。
アライメント光投射系2は、前眼部観察系5の光軸方向(前後方向、Z方向)及び光軸に直交する方向(左右方向(X方向)、上下方向(Y方向))のアライメントを行うための光(赤外光)を被検眼Eに照射する。アライメント光投射系2は、ハーフミラー23により前眼部観察系5の光路から分岐された光路に設けられたアライメント光源21とコリメータレンズ22とを含む。アライメント光源21から出力された光は、コリメータレンズ22を通過し、ハーフミラー23により反射され、前眼部観察系5を通じて被検眼Eに投射される。被検眼Eの角膜Crによる反射光は、前眼部観察系5を通じて撮像素子59に導かれる。
ケラト測定系3は、被検眼Eの角膜Crの形状を測定するためのリング状光束(赤外光)を角膜Crに投射する。ケラト板31は、対物レンズ51と被検眼Eとの間に配置されている。ケラト板31の背面側(対物レンズ51側)にはケラトリング光源32が設けられている。ケラトリング光源32からの光でケラト板31を照明することにより、被検眼Eの角膜Crにリング状光束(円弧状又は円周状の測定パターン)が投射される。被検眼Eの角膜Crからの反射光(ケラトリング像)は撮像素子59により前眼部像E´とともに検出される。処理部9は、このケラトリング像を基に公知の演算を行うことで、角膜Crの形状を表す角膜形状パラメータを算出する。
レフ測定光学系は、眼屈折力測定に用いられるレフ測定投射系6及びレフ測定受光系7を含む。レフ測定投射系6は、眼屈折力測定用の光束(例えば、リング状光束)(赤外光)を眼底Efに投射する。レフ測定受光系7は、この光束の被検眼Eからの戻り光を受光する。レフ測定投射系6は、レフ測定受光系7の光路に設けられた孔開きプリズム65によって分岐された光路に設けられる。孔開きプリズム65に形成されている孔部は、瞳孔共役位置に配置される。レフ測定受光系7を経由する光学系において、撮像素子59の撮像面は眼底共役位置に配置される。
ダイクロイックミラー67によりレフ測定光学系の光路から波長分離された光路に、後述のOCT光学系8が設けられる。ダイクロイックミラー83によりOCT光学系8の光路から分岐された光路に固視投影系4が設けられる。
図1に示すOCT光学系8は、OCT計測を行うための光学系である。例えば、OCT計測よりも前に実施されたレフ測定結果に基づいて、光ファイバーf1の端面が撮影部位(眼底Ef又は前眼部)と光学系に共役となるように合焦レンズ87の位置が調整される。或いは、例えば、OCT計測により得られる干渉信号の強度が最大になるように合焦レンズ87の位置が調整される。
眼科装置1000の処理系の構成について説明する。眼科装置1000の処理系の機能的構成の例を図4~図7に示す。図4は、眼科装置1000の処理系の機能ブロック図の一例を表す。図5は、データ処理部225の機能ブロック図の一例を表す。図6は、アライメント処理部2251の機能ブロック図の一例を表す。図7は、傾斜角度処理部2252の機能ブロック図の一例を表す。
制御部210は、プロセッサを含み、眼科装置1000の各部を制御する。制御部210は、主制御部211と、記憶部212とを含む。記憶部212には、眼科装置1000を制御するためのコンピュータプログラムがあらかじめ格納される。コンピュータプログラムには、光源制御用プログラム、検出器制御用プログラム、光スキャナー制御用プログラム、光学系制御用プログラム、アライメント制御用プログラム、トラッキング制御用プログラム、演算処理用プログラム及びユーザインターフェイス用プログラムなどが含まれる。このようなコンピュータプログラムに従って主制御部211が動作することにより、制御部210は制御処理を実行する。
記憶部212は、各種のデータを記憶する。記憶部212に記憶されるデータとしては、例えば他覚測定の測定結果、OCT計測の計測結果、断層像の画像データ、前眼部像の画像データ、被検眼情報、後述の収差情報、後述の模型眼データ(標準値データ)などがある。被検眼情報は、左眼/右眼の識別情報などの被検眼に関する情報を含む。
光学系位置取得部213は、眼科装置1000に搭載され、被検眼Eのデータを光学的に取得するための上記の装置光学系の現在位置を取得する。
演算処理部220は、眼屈折度数算出部221と、角膜形状算出部222と、眼内距離算出部223と、画像形成部224と、データ処理部225とを含む。
眼屈折度数算出部221は、レフ測定投射系6により眼底Efに投影されたリング状光束(リング状の測定パターン)の戻り光を撮像素子59が受光することにより得られたリング像(パターン像)を解析する。例えば、眼屈折度数算出部221は、得られたリング像が描出された画像における輝度分布からリング像の重心位置を求め、この重心位置から放射状に延びる複数の走査方向に沿った輝度分布を求め、この輝度分布からリング像を特定する。続いて、眼屈折度数算出部221は、特定されたリング像の近似楕円を求め、この近似楕円の長径及び短径を公知の式に代入することによって球面度数、乱視度数及び乱視軸角度(眼屈折度数)を求める。或いは、眼屈折度数算出部221は、基準パターンに対するリング像の変形及び変位に基づいて眼屈折度数のパラメータを求めることができる。
角膜形状算出部222は、ケラト測定系3により被検眼Eの角膜Crに投影されたリング状光束の戻り光を撮像素子59が受光することにより得られたケラトリング像を解析することにより被検眼Eの角膜形状情報を算出する。
眼内距離算出部223は、OCT光学系8により得られた干渉光LCの検出結果に基づいて被検眼Eにおける1以上の眼内距離を求める。1以上の眼内距離は、眼軸長(角膜頂点から内境界膜までの距離)を含む。いくつかの実施形態では、眼内距離算出部223は、OCT光学系8により得られた干渉光LCの検出結果を解析することにより眼内の所定部位に相当する干渉光の検出結果(干渉信号)のピーク位置を特定し、特定されたピーク位置間の距離に基づいて上記の眼内距離を求める。いくつかの実施形態に係る眼内距離算出部223は、更に、角膜厚、前房深度、水晶体厚、硝子体腔長、網膜厚、脈絡膜厚などを求める。
画像形成部224は、検出器125により検出された信号に基づいて、眼底Efの断層像の画像データを形成する。すなわち、画像形成部224は、干渉光学系による干渉光LCの検出結果に基づいて被検眼Eの画像データを形成する。この処理には、従来のスペクトラルドメインタイプのOCTと同様に、フィルター処理、FFT(Fast Fourier Transform)などの処理が含まれている。このようにして取得される画像データは、複数のAライン(被検眼E内における各測定光LSの経路)における反射強度プロファイルを画像化することにより形成された一群の画像データを含むデータセットである。
データ処理部225は、画像形成部224により形成された断層像に対して各種のデータ処理(画像処理)や解析処理を施す。例えば、データ処理部225は、画像の輝度補正や分散補正等の補正処理を実行する。また、データ処理部225は、前眼部観察系5を用い得られた画像(前眼部像等)に対して各種の画像処理や解析処理を施す。
図6に示すように、アライメント処理部2251は、画像補正部2251Aと、プルキンエ像特定部2251Bと、プルキンエ像位置特定部2251Cと、瞳孔中心特定部2251Dと、瞳孔中心位置特定部2251Eと、移動目標位置決定部2251Fと、ずれ量特定部2251Gとを含む。
画像補正部2251Aは、前眼部カメラ300により得られた撮影画像の歪みを補正する。画像補正部2251Aは、記憶部212に記憶されている収差情報に基づいて撮影画像の歪みを補正することができる。この処理は、例えば、歪曲収差を補正するための補正係数に基づく公知の画像処理技術によって実行される。なお、前眼部カメラ300の光学系が撮影画像に与える歪曲収差が十分に小さい場合などには、収差情報及び画像補正部2251Aが設けられていなくてよい。
主制御部211は、例えば、アライメント光源21を点灯させる。それにより、前眼部にアライメント光束が投射され、プルキンエ像が形成される。プルキンエ像は、角膜曲率半径の2分の1の距離だけ角膜頂点から軸方向(Z方向)に偏位した位置に形成される。
プルキンエ像位置特定部2251Cは、プルキンエ像特定部2251Bから入力された情報に基づいて、プルキンエ像特定部2251Bにより特定されたプルキンエ像の位置を特定する。プルキンエ像の位置は、少なくともX方向の位置(X座標値)及びY方向の位置(Y座標値)を含んでよく、更にZ方向の位置(Z座標値)を含んでもよい。
瞳孔中心特定部2251Dは、前眼部カメラ300により得られた各撮影画像、又は画像補正部2251Aにより歪曲収差が補正された画像を解析することで、前眼部の所定の特徴点に相当する当該撮影画像中の位置を特定する。この実施形態では、被検眼Eの瞳孔中心が特定される。なお、瞳孔中心として、瞳孔の重心を求めてもよい。また、瞳孔中心(瞳孔重心)以外の特徴点を特定するように構成することもできる。
瞳孔中心位置特定部2251Eは、2つの前眼部カメラ300の位置(及び撮影倍率)と、瞳孔中心特定部2251Dにより特定された2つの撮影画像中の瞳孔中心の位置とに基づいて、被検眼Eの瞳孔中心の3次元位置を特定する。
z方向の分解能(奥行き分解能):Δz=H×H×Δp/(B×f)
移動目標位置決定部2251Fは、プルキンエ像位置特定部2251Cにより特定されたプルキンエ像の位置と、瞳孔中心位置特定部2251Eにより特定された瞳孔中心位置とに基づいて、装置光学系の移動目標位置を決定する。例えば、移動目標位置決定部2251Fは、特定されたプルキンエ像の位置と、特定された瞳孔中心位置との差分を求め、求められた差分が既定のアライメント完了条件を満たすように移動目標位置を決定する。
ずれ量特定部2251Gは、アライメントが行われたOCT光学系8の測定光軸と被検眼Eの眼球光軸とのずれ量を特定する。測定光軸は、被検眼Eに測定光LSを照射する光学系の光軸(又は対物レンズ51の光軸)である。眼球光軸は、視軸、眼軸など、眼球を通過する任意の軸であってよい。被検眼Eに固視光束を投影しつつOCT計測を行う場合、眼球光軸は、視軸である。この実施形態では、ずれ量特定部2251Gは、測定光軸と被検眼Eの視軸とのずれ量を特定する。
図7に示すように、傾斜角度処理部2252は、換算部2252Aと、画像傾斜角度算出部2252Bと、眼底傾斜角度算出部2252Cとを含む。
換算部2252Aは、画像形成部224により形成された断層像において指定された距離を実寸法に相当する値に変換する。換算部2252Aは、断層像におけるZ方向の距離については、装置光学系に固有の眼球組織内の画素間隔値Δp(単位:マイクロメートル/ピクセル)を基準に換算する。換算部2252Aは、断層像におけるXY方向の距離(OCT計測範囲)については、以下のように生成されたサイズ情報を基準に換算する。
画像傾斜角度算出部2252Bは、画像形成部224により形成された被検眼Eの断層像における眼底Efの傾斜角度を算出する。画像傾斜角度算出部2252Bは、例えば、データ処理部225による公知のセグメンテーション処理により特定された所定の層領域の傾斜角度を求める。所定の層領域として、内境界膜(Inner Limiting Membrane)、神経繊維層、神経節細胞層、内網状層、内顆粒層、外網状層、外顆粒層、外境界膜、視細胞層、網膜色素上皮層(Retinal Pigment Epithelium)などがある。
眼底傾斜角度算出部2252Cは、ずれ量特定部2251Gにより特定されたずれ量に応じて、画像傾斜角度算出部2252Bにより求められた断層像の傾斜角を補正することにより眼底傾斜角を算出することが可能である。
図11に示すように、傾斜角度処理部2252により測定光軸(対物レンズ51の光軸)Oaxと眼球光軸(視軸)Eaxとが略一致していると判定されたとき、眼底傾斜角度算出部2252Cは、断層像の傾斜角度g0を補正することなく眼底傾斜角度g1として出力する。すなわち、眼底傾斜角度算出部2252Cは、式(2)に示すように、画像傾斜角度算出部2252Bにより求められた断層像の傾斜角度g0を眼底傾斜角度g1として出力する。
図12に示すように、傾斜角度処理部2252により測定光軸Oaxに対して眼球光軸Eaxがシフトしていると判定されたとき、眼底傾斜角度算出部2252Cは、ずれ量特定部2251Gにより特定されたシフト量dsに基づいて断層像の傾斜角度g0を補正することにより眼底傾斜角度g1を求める。
g1=g0-φ1 ・・・(4)
図13に示すように、傾斜角度処理部2252により測定光軸Oaxに対して眼球光軸Eaxがチルトしていると判定されたとき、眼底傾斜角度算出部2252Cは、ずれ量特定部2251Gにより特定されたチルト量dtに基づいて断層像の傾斜角度g0を補正することにより眼底傾斜角度g1を求める。
g1=g0-φ2 ・・・(6)
図14に示すように、傾斜角度処理部2252により測定光軸Oaxに対して眼球光軸Eaxがシフトし、且つチルトしていると判定されたとき、眼底傾斜角度算出部2252Cは、ずれ量特定部2251Gにより特定されたシフト量ds及びチルト量dtに基づいて断層像の傾斜角度g0を補正することにより眼底傾斜角度g1を求める。
g1=g0-φ3 ・・・(8)
表示部270は、ユーザインターフェイス部として、制御部210による制御を受けて情報を表示する。表示部270は、図1などに示す表示部10を含む。
通信部290は、図示しない外部装置と通信するための機能を有する。通信部290は、外部装置との接続形態に応じた通信インターフェイスを備える。外部装置の例として、レンズの光学特性を測定するための眼鏡レンズ測定装置がある。眼鏡レンズ測定装置は、被検者が装用する眼鏡レンズの度数などを測定し、この測定データを眼科装置1000に入力する。また、外部装置は、任意の眼科装置、記録媒体から情報を読み取る装置(リーダ)や、記録媒体に情報を書き込む装置(ライタ)などでもよい。更に、外部装置は、病院情報システム(HIS)サーバ、DICOM(Digital Imaging and COmmunication in Medicine)サーバ、医師端末、モバイル端末、個人端末、クラウドサーバなどでもよい。通信部290は、例えば処理部9に設けられていてもよい。
実施形態に係る眼科装置1000の動作について説明する。
図示しない顔受け部に被検者の顔が固定された状態で、検者が操作部280に対して所定の操作を行うことで、眼科装置1000は、アライメントを実行する。
次に、主制御部211は、所望の固視位置に対応した表示位置に固視標を示すパターンを液晶パネル41に表示させる。それにより、所望の固視位置に被検眼Eを注視させる。その後、主制御部211は、ケラトリング光源32を点灯させる。ケラトリング光源32から光が出力されると、被検眼Eの角膜Crに角膜形状測定用のリング状光束が投射される。角膜形状算出部222は、撮像素子59によって取得された像に対して演算処理を施すことにより、角膜曲率半径を算出し、算出された角膜曲率半径から角膜屈折力、角膜乱視度及び角膜乱視軸角度を算出する。制御部210では、算出された角膜屈折力などが記憶部212に記憶される。
眼屈折力測定では、主制御部211は、前述のように屈折力測定のためのリング状の測定パターン光束を被検眼Eに投射させる。被検眼Eからの測定パターン光束の戻り光に基づくリング像が撮像素子59の撮像面に結像される。主制御部211は、撮像素子59により検出された眼底Efからの戻り光に基づくリング像を取得できたか否かを判定する。例えば、主制御部211は、撮像素子59により検出された戻り光に基づく像のエッジの位置(画素)を検出し、像の幅(外径と内径との差)が所定値以上であるか否かを判定する。或いは、主制御部211は、所定の高さ(リング径)以上の点(像)に基づいてリングを形成できるか否かを判定することにより、リング像を取得できたか否かを判定してもよい。
まず、主制御部211は、固視ユニット40(液晶パネル41)を雲霧位置から合焦位置に移動させる。いくつかの実施形態では、合焦位置は、ステップS3で特定された等価球面度数(S+C/2)の位置、又は等価球面度数(S+C/2)の位置から干渉信号の強度等が最大になるようにフォーカス調整された位置である。
主制御部211は、被検眼Eの眼軸長を眼内距離算出部223に算出させる。眼内距離算出部223は、ステップS4において取得された干渉光LCの検出信号のピーク位置から角膜頂点に相当する位置と眼底に相当する位置とを特定し、特定された位置から眼軸長を算出する。
主制御部211は、ステップS4における測定光LSのスキャンにより得られた検出信号を画像形成部224に送り、得られた検出信号から眼底Efの断層像を画像形成部224に形成させる。
続いて、主制御部211は、図10に示すようにOCT計測範囲(断層像の水平方向の距離)を特定し、換算部2252Aを制御することにより、特定されたOCT計測範囲を実寸法に相当する値に変換させる。換算部2252Aは、ステップS2において取得された角膜曲率半径、ステップS3において取得された眼屈折度数、及びステップS5において取得された眼軸長を用いてOCT計測範囲を実寸法に相当する値に換算する。
次に、主制御部211は、図10に示すように、ステップS6において形成された断層像の傾斜角度を画像傾斜角度算出部2252Bに算出させる。
主制御部211は、ステップS4におけるOCT計測が行われたときにずれ量特定部2251Gにより特定されたずれ量を傾斜角度処理部2252に取得させ、測定光軸に対して眼球光軸がシフト又はチルトしているか否かを判定させる。
ステップS9において測定光軸に対して眼球光軸がシフト又はチルトしていると判定されたとき(S9:Y)、主制御部211は、眼底傾斜角度算出部2252Cを制御することにより、ステップS9において算出された断層像の傾斜角度を補正させる。
ステップS9において測定光軸が眼球光軸に略一致していると判定されたとき(S9:N)、主制御部211は、ステップS8において求められた断層像の傾斜角度g0を補正することなく、眼底傾斜角度g1として表示部270に表示させる。
[第1変形例]
上記の実施形態では、レフ測定光学系により眼屈折度数を取得し、取得された眼屈折度数を用いてOCT計測範囲を補正する場合について説明したが、実施形態に係る構成はこれに限定されるものではない。
眼科装置は、ステップS1と同様にアライメントを実行する。
次に、主制御部211は、ステップS2と同様に、ケラト測定を実行させる。
続いて、主制御部211は、ステップS4と同様にOCT計測を実行させる。このとき、OCT計測の前に実行されるフォーカス調整において決定された合焦レンズ87の位置から被検眼Eの眼屈折度数が特定される。
主制御部211は、ステップS5と同様に、被検眼Eの眼軸長を眼内距離算出部223に算出させる。
主制御部211は、ステップS6と同様に、眼底Efの断層像を画像形成部224に形成させる。
続いて、主制御部211は、ステップS7と同様に、換算部2252Aを制御することにより、特定されたOCT計測範囲を実寸法に相当する値に変換させる。このとき、換算部2252Aは、ステップS22において取得された角膜曲率半径、ステップS23におけるOCT計測前のフォーカス調整で決定された合焦レンズ87の位置に対応した眼屈折度数、及びステップS24において取得された眼軸長を用いてOCT計測範囲を実寸法に相当する値に換算する。すなわち、第1変形例に係る画像傾斜角度算出部2252Bは、角膜曲率半径と、測定光軸における合焦レンズ87の位置と、眼軸長とに基づいて、断層像のフレームの水平方向の距離を実寸法に相当する値に換算する。
次に、主制御部211は、ステップS8と同様に、ステップS25において形成された断層像の傾斜角度を画像傾斜角度算出部2252Bに算出させる。
主制御部211は、ステップS9と同様に、測定光軸に対して眼球光軸がシフト又はチルトしているか否かを判定させる。
ステップS28において測定光軸に対して眼球光軸がシフト又はチルトしていると判定されたとき(S28:Y)、主制御部211は、ステップS10と同様に、眼底傾斜角度算出部2252Cを制御することにより、ステップS27において算出された断層像の傾斜角度を補正させる。
ステップS28において測定光軸が眼球光軸に略一致していると判定されたとき(S28:N)、主制御部211は、ステップS27において求められた断層像の傾斜角度を補正することなく、眼底傾斜角度として表示部270に表示させる。
上記の実施形態又は第1変形例において、経過観察を目的として同一の被検眼に対して複数回のOCT計測が実行される場合に、算出された眼底傾斜角度の経時的な変化を表す情報を表示部270に表示させてもよい。
上記の実施形態又はその変形例において、被検眼の眼底の傾斜の程度を容易に把握できるように、眼底の傾斜角度の基準範囲を表す情報を眼底の断層像に重畳させて表示部270に表示させてもよい。
実施形態に係る眼科装置の作用及び効果について説明する。
上記の実施形態又はその変形例では、被検眼に光を投射することにより眼屈折度数を取得する場合について説明したが、実施形態に係る眼科装置の構成はこれに限定されるものではない。実施形態に係る眼科装置は、公知の波面センサーを用いて取得された波面収差に基づいて眼屈折度数を取得してもよい。
3 ケラト測定系
4 固視投影系
5 前眼部観察系
6 レフ測定投射系
7 レフ測定受光系
8 OCT光学系
9 処理部
210 制御部
211 主制御部
212 記憶部
213 光学系位置取得部
220 演算処理部
221 眼屈折度数算出部
222 角膜形状算出部
223 眼内距離算出部
224 画像形成部
225 データ処理部
2251 アライメント処理部
2251A 画像補正部
2251B プルキンエ像特定部
2251C プルキンエ像位置特定部
2251D 瞳孔中心特定部
2251E 瞳孔中心位置特定部
2251F 移動目標位置決定部
2251G ずれ量特定部
2252 傾斜角度処理部
2252A 換算部
2252B 画像傾斜角度算出部
2252C 眼底傾斜角度算出部
1000 眼科装置
Claims (16)
- 被検眼の眼底に測定光を照射することにより前記眼底のOCTデータを取得するOCT光学系と、
前記被検眼における所定部位を基準として前記OCT光学系のアライメントを行うアライメント部と、
前記アライメント部によりアライメントが行われた前記OCT光学系により取得された前記OCTデータに基づいて前記眼底の断層像を形成する画像形成部と、
前記断層像の第1傾斜角度を算出する第1算出部と、
前記アライメント部によりアライメントが行われた前記OCT光学系の測定光軸と前記被検眼の眼球光軸とのずれ量を特定するずれ量特定部と、
前記ずれ量に基づいて前記第1傾斜角度を補正することにより前記眼底の第2傾斜角度を算出する第2算出部と、
を含む眼科装置。 - 前記測定光軸と前記眼球光軸とが略一致しているとき、前記第2算出部は、前記第1傾斜角度を前記第2傾斜角度として出力する
ことを特徴とする請求項1に記載の眼科装置。 - 前記ずれ量特定部は、前記測定光軸に交差する方向における前記測定光軸に対する前記眼球光軸の変位量をシフト量として特定し、
前記測定光軸に対して前記眼球光軸がシフトしているとき、前記第2算出部は、前記シフト量に基づいて前記第1傾斜角度を補正することにより前記第2傾斜角度を算出する
ことを特徴とする請求項1又は請求項2に記載の眼科装置。 - 前記第2算出部は、前記シフト量を変数とする一次式に従って前記第1傾斜角度を補正することにより前記第2傾斜角度を算出する
ことを特徴とする請求項3に記載の眼科装置。 - 前記ずれ量特定部は、前記測定光軸に対して前記眼球光軸がなす角度をチルト量として特定し、
前記測定光軸に対して前記眼球光軸がチルトしているとき、前記第2算出部は、前記チルト量に基づいて前記第1傾斜角度を補正することにより前記第2傾斜角度を算出する
ことを特徴とする請求項1~請求項4のいずれか一項に記載の眼科装置。 - 前記第2算出部は、前記チルト量を変数とする一次式に従って前記第1傾斜角度を補正することにより前記第2傾斜角度を算出する
ことを特徴とする請求項5に記載の眼科装置。 - 前記ずれ量特定部は、前記測定光軸に交差する方向における前記測定光軸に対する前記眼球光軸の変位量をシフト量として特定すると共に、前記測定光軸に対して前記眼球光軸がなす角度をチルト量として特定し、
前記測定光軸に対して前記眼球光軸がシフトし、且つチルトしているとき、前記第2算出部は、前記シフト量及び前記チルト量に基づいて前記第1傾斜角度を補正することにより前記第2傾斜角度を算出する
ことを特徴とする請求項1又は請求項2に記載の眼科装置。 - 前記第2算出部は、前記シフト量を変数とする一次式と前記チルト量を変数とする一次式とを線形結合することにより得られた結合式に従って前記第1傾斜角度を補正することにより前記第2傾斜角度を算出する
ことを特徴とする請求項7に記載の眼科装置。 - 前記OCTデータを取得するときに前記眼底に固視光束を投影する固視投影系を含み、
前記眼球光軸は、視軸である
ことを特徴とする請求項1~請求項8のいずれか一項に記載の眼科装置。 - 前記アライメント部は、
前記被検眼にアライメント光を投射するアライメント光投射系と、
前記被検眼と前記OCT光学系とを相対的に移動する移動機構と、
前記アライメント光が投射されている前記被検眼の前眼部を異なる方向から撮影する2以上の撮影部と、
前記2以上の撮影部により得られた2以上の撮影画像を解析することにより前記アライメント光による角膜の反射像の第1位置と前記所定部位の第2位置とを特定し、前記第1位置と前記第2位置とに基づいて前記OCT光学系の移動目標位置を決定する位置決定部と、
を含む
ことを特徴とする請求項1~請求項9のいずれか一項に記載の眼科装置。 - 前記断層像のフレーム右端における前記眼底における所定の層領域に相当する部位の画像領域とフレーム左端における前記部位の画像領域との垂直方向の距離の差分を実寸法に相当する値に換算した値をdとし、前記断層像のフレームの水平方向の距離を実寸法に相当する値に換算した値をcとしたとき、
前記第1算出部は、arctan(|d|/c)を求めることにより前記第1傾斜角度を算出する
ことを特徴とする請求項1~請求項10のいずれか一項に記載の眼科装置。 - 少なくとも前記被検眼の角膜曲率半径を測定する角膜形状測定部と、
前記被検眼の眼屈折度数を測定する眼屈折力測定部と、
前記OCTデータに基づいて前記被検眼の眼軸長を算出する眼内距離算出部と、
を含み、
前記第1算出部は、前記角膜曲率半径と、前記眼屈折度数と、前記眼軸長とに基づいて、前記断層像のフレームの水平方向の距離を実寸法に相当する値に換算する
ことを特徴とする請求項11に記載の眼科装置。 - 少なくとも前記被検眼の角膜曲率半径を測定する角膜形状測定部と、
前記OCTデータに基づいて前記被検眼の眼軸長を算出する眼内距離算出部と、
を含み、
前記OCT光学系は、測定光軸に沿って移動可能な合焦レンズを含み、
前記第1算出部は、前記角膜曲率半径と、前記測定光軸における前記合焦レンズの位置と、前記眼軸長とに基づいて、前記断層像のフレームの水平方向の距離を実寸法に相当する値に換算する
ことを特徴とする請求項11に記載の眼科装置。 - 前記第1算出部は、前記距離の差分に所定の画素間隔値を乗算することにより前記距離の差分を実寸法に相当する値に換算する
ことを特徴とする請求項11~請求項13のいずれか一項に記載の眼科装置。 - 前記第2算出部により算出された前記第2傾斜角度を、前記OCTデータの取得タイミングを表す情報に関連付けて記憶する記憶部と、
前記記憶部に記憶された前記第2傾斜角度と前記取得タイミングを表す情報とに基づいて、前記第2傾斜角度の経時的な変化を表す情報を表示手段に表示させる制御部と、
を含む
ことを特徴とする請求項1~請求項14のいずれか一項に記載の眼科装置。 - 眼底の傾斜角度の基準範囲を表す情報を、前記画像形成部により形成された前記断層像に重畳するように表示手段に表示させる制御部を含む
ことを特徴とする請求項1~請求項14のいずれか一項に記載の眼科装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/146,144 US10743762B2 (en) | 2018-09-28 | 2018-09-28 | Ophthalmologic apparatus |
| US16/146,144 | 2018-09-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020054806A JP2020054806A (ja) | 2020-04-09 |
| JP7304780B2 true JP7304780B2 (ja) | 2023-07-07 |
Family
ID=69947959
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019165944A Active JP7304780B2 (ja) | 2018-09-28 | 2019-09-12 | 眼科装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10743762B2 (ja) |
| JP (1) | JP7304780B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019101409B4 (de) * | 2019-01-21 | 2021-12-30 | Oculus Optikgeräte GmbH | Verfahren und Sehprüfsystem zum Überprüfen der Augen |
| JP6707239B1 (ja) * | 2019-03-13 | 2020-06-10 | 株式会社中京メディカル | 円錐角膜判定装置及びプログラム |
| US11583179B2 (en) * | 2020-02-20 | 2023-02-21 | Meta Platforms Technologies, Llc | Lens fitting metrology with optical coherence tomography |
| EP3888528A1 (en) * | 2020-03-30 | 2021-10-06 | Nidek Co., Ltd. | Ophthalmic apparatus |
| CN112215883B (zh) * | 2020-09-07 | 2023-03-31 | 上海市第一人民医院 | 眼底oct图像虚拟测量设备、方法及计算机可读存储介质 |
| FI130863B1 (en) * | 2020-12-21 | 2024-04-29 | Optomed Oyj | Ophthalmological examination apparatus and method for forming an alignment between the eye and the ophthalmic examination apparatus |
| US20240041318A1 (en) * | 2020-12-23 | 2024-02-08 | Essilor International | Method of evaluating the efficiency of a myopia control solution |
| CN113397476B (zh) * | 2021-06-16 | 2023-08-22 | 浙大宁波理工学院 | 一种用于全自动测量眼球参数的方法 |
| EP4437936A1 (en) * | 2023-03-28 | 2024-10-02 | Topcon Corporation | Ophthalmological apparatus |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120200824A1 (en) | 2011-02-04 | 2012-08-09 | Nidek Co., Ltd. | Ophthalmic photographing apparatus |
| JP2015033397A (ja) | 2013-08-07 | 2015-02-19 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3569026B2 (ja) | 1995-04-05 | 2004-09-22 | 株式会社コーナン・メディカル | 眼底カメラ |
| JP5601612B2 (ja) * | 2009-06-02 | 2014-10-08 | 株式会社ニデック | 眼科撮影装置 |
| EP3127474B1 (en) * | 2012-03-12 | 2021-11-10 | Kabushiki Kaisha Topcon | Image displaying apparatus and image displaying method |
| JP5989523B2 (ja) | 2012-05-01 | 2016-09-07 | 株式会社トプコン | 眼科装置 |
| JP6469387B2 (ja) | 2014-08-26 | 2019-02-13 | 株式会社トプコン | 眼底解析装置 |
-
2018
- 2018-09-28 US US16/146,144 patent/US10743762B2/en active Active
-
2019
- 2019-09-12 JP JP2019165944A patent/JP7304780B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120200824A1 (en) | 2011-02-04 | 2012-08-09 | Nidek Co., Ltd. | Ophthalmic photographing apparatus |
| JP2012161427A (ja) | 2011-02-04 | 2012-08-30 | Nidek Co Ltd | 眼科撮影装置 |
| JP2015033397A (ja) | 2013-08-07 | 2015-02-19 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020054806A (ja) | 2020-04-09 |
| US10743762B2 (en) | 2020-08-18 |
| US20200100673A1 (en) | 2020-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7304780B2 (ja) | 眼科装置 | |
| JP7213048B2 (ja) | 眼科情報処理装置、眼科装置、及び眼科情報処理方法 | |
| JP7186587B2 (ja) | 眼科装置 | |
| JP7134014B2 (ja) | 眼科装置、及びその制御方法 | |
| JP7141279B2 (ja) | 眼科情報処理装置、眼科装置、及び眼科情報処理方法 | |
| JP7394948B2 (ja) | 眼科装置 | |
| JP6513747B2 (ja) | 眼科装置 | |
| JP7349807B2 (ja) | 眼科装置 | |
| JP7236927B2 (ja) | 眼科装置、その制御方法、眼科情報処理装置、その制御方法、プログラム、及び記録媒体 | |
| JP6825042B2 (ja) | 眼科装置 | |
| JP7164328B2 (ja) | 眼科装置、及び眼科装置の制御方法 | |
| JP7106320B2 (ja) | 眼科装置、及び眼科装置の制御方法 | |
| JP2022110602A (ja) | 眼科装置、眼科装置の制御方法、及びプログラム | |
| JP6518733B2 (ja) | 眼科装置 | |
| JP2020072966A (ja) | 眼科装置及び眼科検査システム | |
| JP7292072B2 (ja) | 眼科装置 | |
| JP7201855B2 (ja) | 眼科装置、及び眼科情報処理プログラム | |
| JP7116572B2 (ja) | 眼科装置、及び眼科情報処理プログラム | |
| JP7281877B2 (ja) | 眼科装置 | |
| JP7244211B2 (ja) | 眼科装置、及び眼科装置の制御方法 | |
| JP7103813B2 (ja) | 眼科装置 | |
| JP7133995B2 (ja) | 眼科装置、及びその制御方法 | |
| JP7030577B2 (ja) | 眼科装置 | |
| JP7339011B2 (ja) | 眼科装置、眼科情報処理装置、プログラム、及び記録媒体 | |
| JP2023126596A (ja) | 眼科装置、及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220830 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230406 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230418 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230530 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230627 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7304780 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |