JP7303365B2 - 検出値のストリングに基づいたセンサ較正 - Google Patents
検出値のストリングに基づいたセンサ較正 Download PDFInfo
- Publication number
- JP7303365B2 JP7303365B2 JP2022500001A JP2022500001A JP7303365B2 JP 7303365 B2 JP7303365 B2 JP 7303365B2 JP 2022500001 A JP2022500001 A JP 2022500001A JP 2022500001 A JP2022500001 A JP 2022500001A JP 7303365 B2 JP7303365 B2 JP 7303365B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- sequence
- values
- sensors
- ground truth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4026—Antenna boresight
- G01S7/403—Antenna boresight in azimuth, i.e. in the horizontal plane
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4026—Antenna boresight
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
- G01S7/4972—Alignment of sensor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52004—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
Description
静止標的140に関連する検出値のシーケンス210を取得するように構成された取得ユニットS1xと、
静止標的140に関連する対応するグラウンドトゥルース値のシーケンス220を決定するように構成された決定ユニットS2xであって、グラウンドトゥルース値は、車両100から静止標的140までの最小検出距離に基づいて、かつ車両100の軌跡に基づいて決定される、決定ユニットS2xと、
検出値のシーケンス210とグラウンドトゥルース値のシーケンス220との間の差250を推定するように構成された推定ユニットS3xと、
推定された差250に基づいて、角度測定122を較正するように構成された較正ユニットS4xと、を備える。
Claims (12)
- 車両内の制御ユニット(130)によって実行される、前記車両内の車両センサ(110)の角度測定(122)を較正するための方法であって、前記方法が、
静止標的(140)に関連する検出値のシーケンス(210)を取得する(S1)ことであって、
前記車両センサ(110)に関連する標的リスト内の静止物体を検出する(S11)ことと、
前記車両(100)が走行しているときに検出値を取得する(S12)ことと
を含む、ことと、
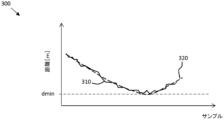
前記静止標的(140)に関連する対応するグラウンドトゥルース値のシーケンス(220)を決定する(S2)ことであって、前記グラウンドトゥルース値は、前記検出値のシーケンス(210)に基づいて決定された前記車両(100)から前記静止標的(140)までの最小検出距離に基づいて、かつ前記車両(100)の軌跡に基づいて決定される、ことと、
前記検出値のシーケンス(210)と前記グラウンドトゥルース値のシーケンス(220)との間の差(250)を推定する(S3)ことと、
推定された前記差(250)に基づいて、前記角度測定(122)を較正する(S4)ことと、を含む方法。 - 前記取得することは、前記車両(100)が所定の較正領域に入るときに検出値を取得する(S13)ことをさらに含む、請求項1に記載の方法。
- 前記取得することは、前記車両センサ(110)のサイドローブに関連する検出値を拒否する(S14)ことをさらに含む、請求項1または2に記載の方法。
- 前記車両(100)の推定軌跡に基づいて前記グラウンドトゥルース値を調整する(S21)ことを含む、請求項1~3のいずれか一項に記載の方法。
- 前記差(250)を推定することは、移動中央値ウィンドウ又はノイズ抑制フィルタによって差をフィルタリングする(S31)ことを含む、請求項1~4のいずれか一項に記載の方法。
- 前記較正することは、取得された前記検出値のシーケンスに基づいて、加重する(S41)ことを含む、請求項1~5のいずれか一項に記載の方法。
- 前記較正することは、前記検出値を取得する間に前記車両の軌跡に基づいて加重する(S42)ことを含む、請求項6に記載の方法。
- 前記較正することは、拡張メモリフィルタ又はノイズ抑制フィルタによって、フィルタリングする(S43)ことを含む、請求項1~7のいずれか一項に記載の方法。
- 前記車両センサ110は、Lidarセンサ、つまり光検出及び測距センサ、レーダセンサ、カメラセンサ、又は超音波センサのうちのいずれかを備える、請求項1~8のいずれか一項に記載の方法。
- コンピュータプログラムであって、コンピュータ上で実行されているときに、請求項1~9のいずれか一項に記載の方法を実行するためのものである、コンピュータプログラム。
- 車両(100)内の車両センサ(110)の角度測定(122)を較正するための制御ユニット(130)であって、前記制御ユニット(130)が、
静止標的(140)に関連する検出値のシーケンス(210)を取得するように構成された取得ユニット(S1x)であって、
前記車両センサ(110)に関連する標的リスト内の静止物体を検出する(S11)ことと、
前記取得することは、前記車両(100)が走行しているときに検出値を取得する(S12)ことと
を行うように構成される、ことと、
前記静止標的(140)に関連する対応するグラウンドトゥルース値のシーケンス(220)を決定するように構成された決定ユニット(S2x)であって、前記グラウンドトゥルース値は、前記検出値のシーケンス(210)に基づいて決定された前記車両(100)から前記静止標的(140)までの最小検出距離に基づいて、かつ前記車両(100)の軌跡に基づいて決定される、決定ユニット(S2x)と、
前記検出値のシーケンス(210)と前記グラウンドトゥルース値のシーケンス(220)との間の差(250)を推定するように構成された推定ユニット(S3x)と、
推定された前記差(250)に基づいて、前記角度測定(122)を較正するように構成された較正ユニット(S4x)と、を備える制御ユニット(130)。 - 請求項11に記載の前記制御ユニット(130)を備える、車両(100)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19184424.0A EP3761054A1 (en) | 2019-07-04 | 2019-07-04 | Sensor calibration based on strings of detections |
| EP19184424.0 | 2019-07-04 | ||
| PCT/EP2020/068561 WO2021001444A1 (en) | 2019-07-04 | 2020-07-01 | Sensor calibration based on strings of detections |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022538676A JP2022538676A (ja) | 2022-09-05 |
| JP7303365B2 true JP7303365B2 (ja) | 2023-07-04 |
Family
ID=67180651
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022500001A Active JP7303365B2 (ja) | 2019-07-04 | 2020-07-01 | 検出値のストリングに基づいたセンサ較正 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3761054A1 (ja) |
| JP (1) | JP7303365B2 (ja) |
| WO (1) | WO2021001444A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4253994A1 (en) | 2022-03-29 | 2023-10-04 | Veoneer Sweden AB | Sensor calibration based on strings of detections |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19962997A1 (de) | 1999-12-24 | 2001-06-28 | Bosch Gmbh Robert | Verfahren zur Kalibrierung eines Sensorsystems |
| JP2003057334A (ja) | 2001-08-15 | 2003-02-26 | Fujitsu Ten Ltd | レーダの水平方向軸ずれ発生検出装置、軸ずれ量決定装置、および軸ずれ補正装置 |
| WO2007015288A1 (ja) | 2005-08-01 | 2007-02-08 | Mitsubishi Denki Kabushiki Kaisha | 軸ずれ量推定方法及び軸ずれ量推定装置 |
| DE102015119660A1 (de) | 2015-11-13 | 2017-05-18 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Kalibrieren eines Sensors eines Kraftfahrzeugs zur Winkelmessung, Recheneinrichtung, Fahrerassistenzsystem sowie Kraftfahrzeug |
| JP2018025485A (ja) | 2016-08-10 | 2018-02-15 | パナソニックIpマネジメント株式会社 | レーダ設置角度算出装置、レーダ装置およびレーダ設置角度算出方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3266827B2 (ja) * | 1997-06-25 | 2002-03-18 | 本田技研工業株式会社 | 車両の物体検知装置 |
| EP3290945A1 (en) * | 2016-09-02 | 2018-03-07 | Autoliv Development AB | Misalignment detection for a vehicle radar sensor |
-
2019
- 2019-07-04 EP EP19184424.0A patent/EP3761054A1/en active Pending
-
2020
- 2020-07-01 WO PCT/EP2020/068561 patent/WO2021001444A1/en active Application Filing
- 2020-07-01 JP JP2022500001A patent/JP7303365B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19962997A1 (de) | 1999-12-24 | 2001-06-28 | Bosch Gmbh Robert | Verfahren zur Kalibrierung eines Sensorsystems |
| JP2003057334A (ja) | 2001-08-15 | 2003-02-26 | Fujitsu Ten Ltd | レーダの水平方向軸ずれ発生検出装置、軸ずれ量決定装置、および軸ずれ補正装置 |
| WO2007015288A1 (ja) | 2005-08-01 | 2007-02-08 | Mitsubishi Denki Kabushiki Kaisha | 軸ずれ量推定方法及び軸ずれ量推定装置 |
| DE102015119660A1 (de) | 2015-11-13 | 2017-05-18 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Kalibrieren eines Sensors eines Kraftfahrzeugs zur Winkelmessung, Recheneinrichtung, Fahrerassistenzsystem sowie Kraftfahrzeug |
| JP2018025485A (ja) | 2016-08-10 | 2018-02-15 | パナソニックIpマネジメント株式会社 | レーダ設置角度算出装置、レーダ装置およびレーダ設置角度算出方法 |
Non-Patent Citations (1)
| Title |
|---|
| 原 六蔵 ほか,移動速度の外部計測を要しないオンボードレーダオフセット角推定法,電子情報通信学会論文誌,日本,社団法人電子情報通信学会,2009年02月01日,第J92-B巻 第2号,Pages: 469-474,ISSN: 1344-4697 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3761054A1 (en) | 2021-01-06 |
| JP2022538676A (ja) | 2022-09-05 |
| WO2021001444A1 (en) | 2021-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3151034B1 (en) | Automated vehicle radar system to determine yaw-rate of a target vehicle | |
| US10591584B2 (en) | Radar calibration with known global positioning of static objects | |
| JP7081046B2 (ja) | レーダセンサにおける角度測定誤差を検出する方法 | |
| US10310076B2 (en) | Driving lane detection device and driving lane detection method | |
| US9889798B1 (en) | Detection of a target object utilizing automotive radar | |
| WO2015034581A1 (en) | Method and apparatus for self calibration of a vehicle radar system | |
| EP3851870A1 (en) | Method for determining position data and/or motion data of a vehicle | |
| JP6714148B2 (ja) | 自動車レーダを利用する標的対象物の改善された検出 | |
| CN111386476B (zh) | 确定车辆雷达系统中的对象运动和加速度矢量 | |
| JP7155284B2 (ja) | 計測精度算出装置、自己位置推定装置、制御方法、プログラム及び記憶媒体 | |
| US11292481B2 (en) | Method and apparatus for multi vehicle sensor suite diagnosis | |
| US11209524B2 (en) | Detection system and method for characterizing targets | |
| JP7303365B2 (ja) | 検出値のストリングに基づいたセンサ較正 | |
| KR20230116783A (ko) | 레이더 또는 lidar 빔 스티어링을 사용한 자기 속도 추정 | |
| KR101356169B1 (ko) | Fmcw 레이더 시스템 및 fmcw 레이더 시스템의 레이더센서 운용방법 | |
| EP3971525B1 (en) | Self-position correction method and self-position correction device | |
| US11914028B2 (en) | Object detection device for vehicle | |
| CN110678776B (zh) | 用于增强的对象跟踪的系统 | |
| JP2023068009A (ja) | 地図情報作成方法 | |
| US11802770B2 (en) | Vehicle position identification device and vehicle position identification method | |
| US11119187B2 (en) | Resolution of doppler ambiguity in a radar system through tracking | |
| CN110542902B (zh) | 一种适用于车载毫米波雷达的简易测高方法 | |
| KR20140088683A (ko) | 차량용 레이더를 이용한 물체 감지 장치, 방법 및 컴퓨터 판독 가능한 기록 매체 | |
| EP4253994A1 (en) | Sensor calibration based on strings of detections | |
| JP6818902B6 (ja) | 車両検知システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220103 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20220712 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221223 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230529 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230622 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7303365 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |