JP7303365B2 - Sensor calibration based on string of detected values - Google Patents
Sensor calibration based on string of detected values Download PDFInfo
- Publication number
- JP7303365B2 JP7303365B2 JP2022500001A JP2022500001A JP7303365B2 JP 7303365 B2 JP7303365 B2 JP 7303365B2 JP 2022500001 A JP2022500001 A JP 2022500001A JP 2022500001 A JP2022500001 A JP 2022500001A JP 7303365 B2 JP7303365 B2 JP 7303365B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- sequence
- values
- sensors
- ground truth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4026—Antenna boresight
- G01S7/403—Antenna boresight in azimuth, i.e. in the horizontal plane
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4026—Antenna boresight
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
- G01S7/4972—Alignment of sensor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52004—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Acoustics & Sound (AREA)
- Radar Systems Or Details Thereof (AREA)
- Traffic Control Systems (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Description
本開示は、車両センサに関し、いくつかの態様によれば、車両と共に使用するための無線検出及び測距(レーダ)トランシーバに関する。 The present disclosure relates to vehicle sensors and, according to some aspects, to wireless detection and ranging (radar) transceivers for use with vehicles.
現代の車両は、多くの場合、車両付近の物体を検出するように配置された1つ以上のレーダトランシーバを備える。物体は、ガードレール及び道路安全地帯などの静止物体であり得るか、又は他の車両などの移動物体であり得る。 Modern vehicles often include one or more radar transceivers arranged to detect objects in the vicinity of the vehicle. Objects can be stationary objects such as guardrails and roadway safety zones, or they can be moving objects such as other vehicles.
レーダトランシーバは、例えば、周波数変調連続波(frequency modulated continuous wave、FMCW)信号の伝送に基づいて、トランシーバと検出された物体との間の距離を推定するように構成されている。レーダトランシーバに対する検出された物体の相対速度はまた、受信された波形のドップラーシフトに基づいて決定され得る。 A radar transceiver is configured to estimate the distance between the transceiver and a detected object, eg, based on transmission of a frequency modulated continuous wave (FMCW) signal. The velocity of the detected object relative to the radar transceiver can also be determined based on the Doppler shift of the received waveform.
いくつかのレーダトランシーバはまた、距離及び相対速度に加えて、検出された物体に対する方位を推定するように配置される。この方位推定は、アンテナアレイ内の異なるアンテナ素子で受信された波形成分の相対位相を決定するように構成されたアレイアンテナを使用することによって達成することができる。方位推定、すなわち、例えば、レーダトランシーバのボアサイト方向に関して検出された物体に対する相対角度を推定することは、一般的には困難な問題である。この問題を特に困難にする1つの側面は、方位推定が正確であるためには、レーダトランシーバの慎重な較正を必要とすることである。 Some radar transceivers are also arranged to estimate azimuth relative to detected objects in addition to range and relative velocity. This bearing estimation can be accomplished by using an array antenna configured to determine the relative phases of waveform components received at different antenna elements within the antenna array. Azimuth estimation, ie, estimating the relative angle to a detected object with respect to, for example, the boresight direction of a radar transceiver, is generally a difficult problem. One aspect that makes this problem particularly difficult is that accurate azimuth estimation requires careful calibration of the radar transceiver.
方位推定精度を改善するためにレーダトランシーバを較正するための既知のアルゴリズムは、レーダトランシーバの速度、例えば、レーダトランシーバが取り付けられている車両の速度と比較した、検出された静止物体の相対速度間の比率を使用する方法を含む。方位θは、次いで、次式から推定又は取得することができる。
![]()
![]()
上記の手法の問題は、較正精度が車両速度精度に強く依存することである。vVの決定におけるわずか数パーセントの誤差が、数等の方位の較正の誤差を生じる場合がある。そのような誤差は、多くの場合、レベル4(L4)自律運転、先進運転支援システム(advanced driver assistance systems、ADAS)などの安全重視の用途では許容されない。 A problem with the above approach is that the calibration accuracy strongly depends on the vehicle speed accuracy. An error of only a few percent in the determination of vV can result in an error in the calibration of orientations such as numbers. Such errors are often unacceptable in safety-critical applications such as Level 4 (L4) autonomous driving, advanced driver assistance systems (ADAS), and the like.
レーダトランシーバを較正するためのより正確な方法、並びにLidar(Light Detection and Ranging、光検出及び測距)センサ、カメラセンサ、又は超音波センサなどの他のタイプの車両センサが、方位の観点から必要とされる。そのような方法では、好ましくは、制約のあることが多いレーダトランシーバ処理リソースを節約するために、計算複雑性は制限されるべきである。 A more accurate method for calibrating radar transceivers and other types of vehicle sensors such as Lidar (Light Detection and Ranging) sensors, camera sensors, or ultrasonic sensors is needed in terms of orientation. It is said that Such methods should preferably have limited computational complexity to conserve radar transceiver processing resources, which are often constrained.
本開示の目的は、上述の欠点の少なくともいくつかを軽減する車両内の車両センサの角度測定を較正するための方法を提供することである。また、本開示の目的は、対応する制御ユニット、コンピュータプログラム製品、及び車両を提供することである。 SUMMARY OF THE DISCLOSURE It is an object of the present disclosure to provide a method for calibrating the angle measurements of vehicle sensors in a vehicle that mitigates at least some of the drawbacks discussed above. It is also an object of the present disclosure to provide corresponding control units, computer program products and vehicles.
この目的は、車両内の車両センサの角度測定を較正するための方法によって得られる。この方法は、静止標的に関連する検出値のシーケンスを取得すること、及び静止標的に関連する、対応するグラウンドトゥルース値のシーケンスを決定することを含み、グラウンドトゥルース値は、車両から静止標的までの最小検出距離に基づいて、かつ車両の軌跡に基づいて決定される。この方法はまた、検出値のシーケンスとグラウンドトゥルース値のシーケンスとの間の差を推定すること、及び推定された差に基づいて角度測定を較正することを含む。 This object is obtained by a method for calibrating the angle measurements of vehicle sensors in a vehicle. The method includes obtaining a sequence of detection values associated with the stationary target and determining a corresponding sequence of ground truth values associated with the stationary target, the ground truth values being measured from the vehicle to the stationary target. It is determined based on the minimum detectable distance and based on the trajectory of the vehicle. The method also includes estimating a difference between the sequence of detected values and the sequence of ground truth values, and calibrating the angle measurement based on the estimated difference.
この方法は、車両速度に依存することなく角度較正を達成し、このことは利点である。この方法は、代わりに、比較的高い精度で取得することができるデータである、静止物体までの最小検出距離を使用する。したがって、車両センサを較正するための堅実かつ正確な方法が提供される。 This method achieves angle calibration independent of vehicle speed, which is an advantage. This method instead uses the minimum detectable distance to a stationary object, data that can be obtained with relatively high accuracy. Thus, a robust and accurate method for calibrating vehicle sensors is provided.
この方法は、車両を動作させながらオンラインで実行することができ、これは、経時的に車両センサ較正を継続的に維持することを可能にするため、利点である。 This method can be performed on-line while the vehicle is in operation, which is an advantage as it allows continuous maintenance of vehicle sensor calibration over time.
いくつかの態様によれば、取得することは、車両センサに関連する標的リスト内の静止物体を検出することを含む。この方法が車両センサから取得された通常の標的リストに適用できることは、利点である。較正ルーチンを実行可能にするために、車両センサにおいて大幅な再設計が必要とされることはない。 According to some aspects, acquiring includes detecting stationary objects in a target list associated with vehicle sensors. It is an advantage that the method can be applied to regular target lists obtained from vehicle sensors. No major redesign is required in the vehicle sensor to enable the calibration routine.
いくつかの態様によれば、取得することは、車両が直線を走行しているときに検出値を取得することを含む。方法を直線状、又は少なくとも実質的に直線状の走行シナリオに限定することによって、車両のより複雑な運動パターン及びそのようなパターンの最終結果への影響を無視することができる。こうした方法の複雑性は更に限定され、これは、車両センサ又はいくつかの関連する処理システムの処理リソースが節約されるため、利点である。 According to some aspects, obtaining includes obtaining the detection value when the vehicle is traveling in a straight line. By limiting the method to linear, or at least substantially linear driving scenarios, the more complex motion patterns of the vehicle and the effect of such patterns on the final result can be neglected. The complexity of such methods is further limited, which is an advantage as it saves processing resources of vehicle sensors or some associated processing system.
いくつかの態様によれば、取得することは、車両が所定の較正領域に入るときに検出値を取得することを含む。いくつかの領域は、提案された方法を実行するのに他の領域よりも好適であり得る。そのような領域は、事前に識別されてもよく、この情報は車両に通信されてもよい。したがって、好ましくはこれらのタイプの較正領域で方法を実行することによって、全体的な較正性能を改善することができる。 According to some aspects, obtaining includes obtaining a detection value when the vehicle enters a predetermined calibration area. Some regions may be more suitable than others for performing the proposed methods. Such areas may be identified in advance and this information may be communicated to the vehicle. Therefore, by preferably performing the method on these types of calibration regions, the overall calibration performance can be improved.
いくつかの態様によれば、取得することは、車両センサのサイドローブに関連する検出値を拒否することを含む。例えば、レーダ検出値などのセンサ検出値は、多くの場合、センサメインローブの両側に延在するサイドローブを含む。サイドローブ検出値は、方法の性能を低下させる恐れがある。しかしながら、サイドローブ検出値を拒否することによって、サイドローブ検出値の影響を低減することができ、これは利点である。 According to some aspects, obtaining includes rejecting detection values associated with sidelobes of vehicle sensors. For example, sensor readings, such as radar readings, often include sidelobes that extend on either side of the sensor mainlobe. Sidelobe detection values can degrade the performance of the method. However, by rejecting sidelobe senses, the impact of sidelobe senses can be reduced, which is an advantage.
いくつかの態様によれば、方法はまた、車両の推定軌跡に基づいてグラウンドトゥルース値を調整することを含む。このようにして、例えば、方法が直線走行シナリオに限定されないため、追加の較正データを取得することができる。最小距離に加えて車両運動を考慮することにより、この方法は、より広範囲の走行シナリオに適用可能であり、このことは利点である。 According to some aspects, the method also includes adjusting the ground truth value based on the estimated trajectory of the vehicle. In this way, additional calibration data can be obtained, for example, since the method is not limited to straight-line driving scenarios. By considering vehicle motion in addition to minimum distance, the method is applicable to a wider range of driving scenarios, which is an advantage.
いくつかの態様によれば、方法は、移動中央ウィンドウによって差異をフィルタリングすることを含む。このようにして、外れ値測定の影響が低減され、これは利点である。 According to some aspects, the method includes filtering differences by a moving center window. In this way the impact of outlier measurements is reduced, which is an advantage.
いくつかの態様によれば、較正することは、取得された検出値のシーケンスに基づいて加重することを含む。一部の検出値のシーケンスは他よりも良好である可能性が高く、すなわち、より正確な較正データをもたらす可能性が高い。例えば、提案された方法に基づく較正に適していることが知られている特定の領域で取得されたデータシーケンスは、較正に不適切であることが知られている領域で取得されたシーケンスと比較して、より高い重みをもたらし得る。このようにして、提案された方法の堅実性が改善される。 According to some aspects, calibrating includes weighting based on the sequence of detected values obtained. Some sequences of detected values are likely to be better than others, ie, likely to yield more accurate calibration data. For example, a data sequence acquired in a particular region known to be suitable for calibration based on the proposed method can be compared with a sequence acquired in a region known to be unsuitable for calibration. can result in higher weights. In this way the robustness of the proposed method is improved.
いくつかの態様によれば、較正することは、検出値を取得する間に車両軌跡に基づいて加重することを含む。最も可能性の高い直線走行シナリオは、車両が操縦するより複雑な較正シナリオと比較して、より高い較正性能に関連する。車両の運動を考慮することにより、方法の性能が向上する。 According to some aspects, calibrating includes weighting based on vehicle trajectory while obtaining detection values. The most likely straight-line driving scenario is associated with higher calibration performance compared to the more complex calibration scenarios where the vehicle steers. Considering the motion of the vehicle improves the performance of the method.
本明細書には、上述の利点に関連する車両、制御ユニット、及びコンピュータプログラム製品も開示されている。 Also disclosed herein are vehicles, control units, and computer program products relating to the above advantages.
本開示は、添付の図面を参照してより詳細に説明される。
本開示の態様は、添付の図面を参照して以下により十分に説明される。しかしながら、本明細書に開示される異なる配置、デバイス、システム、コンピュータプログラム、及び方法は、多くの異なる形態で実現することができ、本明細書に記載の態様に限定されるものとして解釈されるべきではない。図面中の同様の番号は、全体を通して同様の要素を指す。 Aspects of the present disclosure are described more fully below with reference to the accompanying drawings. However, different arrangements, devices, systems, computer programs, and methods disclosed herein may be embodied in many different forms and should not be construed as limited to the aspects set forth herein. shouldn't. Like numbers in the drawings refer to like elements throughout.
本明細書で使用される用語は、本開示の態様のみを説明するためのものであり、本発明を限定することを意図するものではない。本明細書で使用するとき、単数形「a」、「an」、及び「the」は、文脈がそうでないことを明確に示さない限り、複数形も含むことが意図される。 The terminology used herein is for the purpose of describing aspects of the disclosure only and is not intended to be limiting of the invention. As used herein, the singular forms "a," "an," and "the" are intended to include the plural forms as well, unless the context clearly indicates otherwise.
図1は、車両センサシステム110、130を備えた車両100を示す。車両は、速度ベクトルVegoである方向に移動する。車両センサシステムは、車両センサ110及びセンサデータ処理システム130を備える。任意選択の記憶モジュールはまた、車両センサシステムに含まれ得る。記憶モジュールは、車両100の周囲環境に関する情報を含むマップデータを記憶することができる。記憶モジュールは、以下でより詳細に論じられる。
FIG. 1 shows a
センサデータ処理システムは、車両センサ110の動作を制御し、検出値又は車両100付近の物体140に対応するデータ点などの、車両センサ110からのデータを取得するように配置されている。
The sensor data processing system is arranged to control the operation of the
車両センサ110は、潜在的に異なるタイプ及び/又は異なる構成の単一のセンサユニット又は複数のセンサユニットを備え得る。例えば、車両センサ110は、Lidar(光検出及び測距)センサ、レーダセンサ、カメラセンサ、又は超音波センサのうちのいずれかを含み得る。車両センサ110はまた、TOFカメラシステム、構造化光システム、及び立体視システムのうちのいずれかを備え得る。本開示の焦点は、レーダタイプセンサにあるが、本技術はまた、他のタイプのセンサ、特にLidarセンサにも適用可能である。
一例によれば、車両センサ110は、相対座標系における座標、すなわち車両センサ110の位置及び配向に対する座標を含むいくつかのデータ点を生成するように配置されている。座標は、デカルト座標であってもよく、又は極座標であってもよい。車両センサ110はまた、生データ、又はセンサデータから抽出されたより精密な特徴ベクトルを生成するように配置され得る。
According to one example,
データ点はまた、信号強度値又は信号対雑音比(SNR)の測定値などの追加情報を含み得る。 The data points may also include additional information such as signal strength values or signal-to-noise ratio (SNR) measurements.
1つ以上のタイムスタンプはまた、車両センサ110とセンサデータ処理システム130との間を通過する情報に関連し得る。タイムスタンプは、データ点ごとに割り当てられ得るか、又はデータ点のセットに共通であり得る。
One or more timestamps may also be associated with information passing between
車両センサシステム110、130は、無線リンク150を介してリモートサーバ160に接続され得、リモートサーバ160は、リモートネットワーク170に含まれ得る。
車両センサ110は、視野120に関連する。車両センサ110が前方レーダトランシーバである場合、センサ110のボアサイト方向121は、視野120の中心線と一致することが多い。車両センサが代わりにサイドセンサとして構成されている場合、ボアサイト方向は、車両100の方向と比較していくらかの別の角度に向き得る。
いくつかのレーダトランシーバは、物体までの距離だけでなく、方位、すなわちセンサボアサイト方向121から検出された物体140までの測定された角度122もまた推定することを可能とするアンテナアレイを備える。
Some radar transceivers are equipped with antenna arrays that allow estimating not only the range to an object, but also the bearing, ie the measured
上述のように、そのような角度の推定値は、多くの場合、比較的大きな誤差に関連している。図2は、レーダトランシーバ測定データ200の例を示す。レーダトランシーバの位置は、座標(0,0)で星240によって示される。検出値のシーケンス210は、レーダトランシーバの付近の静止物体に関して生成されている。ここで、車両は、直線に沿って、すなわち図2のx軸に沿って走行した。しかしながら、較正誤差により、検出された物体に対する方位の推定値に広がりが存在し、グラフ200の上部215においていくらかの偏差となって表れる。レーダトランシーバ110を較正することによって、この誤差を補償することが望ましい。
As noted above, such angle estimates are often associated with relatively large errors. FIG. 2 shows an example of radar
較正を実行するために、角度誤差がない場合に検出値のシーケンスがどのように見なされるかを推定することによって、一連のグラウンドトゥルース検出値220を生成することが本明細書で提案される。特に、この推定又は予測は、車両と障害物との間で検出された最小距離に基づく。多くのタイプのレーダで、車両と障害物との間で検出される最小距離dminは、車両が障害物を通過する時点、すなわち障害物が車両の真横に位置する時点に対応する。次いで、この点は、車両運動に基づいて、すなわち、最小距離が検出されたときに車両がその点まで移動する方法に基づいて外挿され得る。例えば、車両が直線で走行している場合、グラウンドトゥルース値の合理的なシーケンスは、最小検出距離において車両の真横の点221から開始する検出値の直線として推定することができる。直線は、最小距離検出値が行われた時点までの車が向かっていた方向に平行に延在する。
To perform calibration, it is proposed herein to generate a series of
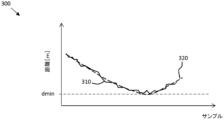
以下では、いくつかの静止物体に関連する検出値のシーケンス310における例示的な距離を概略的に示す図3も参照する。最小距離dminが示されている。いくつかの態様によれば、距離測定値310は、最小距離を決定する前にノイズを抑える(supress)ために、フィルタリングされる(320)、すなわち、平滑化される。フィルタリングされた距離推定値は、図3において破線で示されている。
Reference is also made below to FIG. 3, which schematically illustrates exemplary distances in a
静止物体に対して検出された最小距離dminは、車両の真横であると想定され、この場所221は、グラウンドトゥルース値のシーケンス220の基準点である。次いで、一連のグラウンドトゥルース値を生成するために、車両経路をバックトラックする。車両が直線に沿って走行していた場合、グラウンドトゥルース値もまた、車両の軌跡と平行に、図2に示されるように直線に沿って分布することになる。しかしながら、車両がいくつかの他の経路に続く場合、この経路は一連のグラウンドトゥルース値に反映されることになる。例えば、最小距離が検出される前に旋回を実行した車両は、例えば、車両旋回レート又はヨーレートに基づく車両運動、及びまた潜在的に車両速度に基づく車両運動のバックトラッキングに対応する曲率を有する一連のグラウンドトゥルース値をもたらす。
The minimum detected distance d min for a stationary object is assumed to be right beside the vehicle, and this
実際のレーダ検出値210及び対応する推定グラウンドトゥルース220を有するので、較正誤差は、検出値210と対応する推定グラウンドトゥルース値とを比較することによって決定することができる。これら2つのデータセット間の差を使用して、レーダトランシーバデータを補正し、したがってレーダ方位を較正することができる。補正値230は図2に示されており、誤差は大幅に低減されていることに留意されたい。
Having the
いくつかの態様によれば、センササンプルは、規則的に幾何学的間隔を置くのではなく、規則的に時間間隔を置いて取得される。この場合、グラウンドトゥルース値間の距離は、最小距離が検出された時点までの車両速度の関数として変化する必要があり得る。 According to some aspects, sensor samples are obtained at regular time intervals rather than regular geometric intervals. In this case, the distance between ground truth values may need to vary as a function of vehicle speed up to the point at which the minimum distance is detected.
また、センササンプルと推定グラウンドトゥルース値との間の時間オフセットを補償するために、推定グラウンドトゥルース値間を内挿することが可能である。 It is also possible to interpolate between the estimated ground truth values to compensate for time offsets between the sensor samples and the estimated ground truth values.
要約すると、図4を参照すると、車両100内の車両センサ110の角度測定122を較正するための方法が本明細書に開示される。この方法は、静止標的140に関連する検出値のシーケンス210を取得すること(S1)を含む。レーダ検出値などのセンサ検出値を、(移動物体であるのとは対照的に)静止として分類するためのいくつかの既知の方法がある。例えば、分類は、車両運動に基づくことができる。静止物体は、車両が移動すると同じ地理的位置に留まるが、動的物体は自分の運動軌道を有する。車両運動をセンサ検出値と比較することにより、静止物体を少なくとも~から経時的に識別することができる。静止物体はまた、物体を検出し、物体を経時的に追跡するように構成された追跡アルゴリズムからのデータに基づいて識別され得る。分類の問題は時間平均を含み、したがって、例えば車両速度における誤差に過度に敏感ではないことに留意されたい。
In summary, referring to FIG. 4, a method for calibrating
いくつかの態様によれば、取得することは、車両センサ110に関連する標的リスト内の静止物体を検出する(S11)ことを含む。静止物体を使用することにより、2つの移動物体間の相対運動を推定することに関連する問題が回避される。したがって、較正性能が向上する。 According to some aspects, acquiring includes detecting stationary objects in a target list associated with vehicle sensor 110 (S11). Using stationary objects avoids the problems associated with estimating the relative motion between two moving objects. Therefore, calibration performance is improved.
いくつかの態様によれば、取得することは、車両110が直線で走行しているときに検出値を取得する(S12)ことを含む。図2に関連して例示及び説明されるように、直線走行シナリオは、グラウンドトゥルースデータの特に効率的な生成を可能にする。
According to some aspects, obtaining includes obtaining the detection value when the
いくつかの態様によれば、取得することは、車両110が所定の較正領域に入るときに検出値を取得する(S13)ことを含む。道路の一部の直線コースは、他と比較して、方法を実行するのにより好適であり得る。例えば、いくつかの領域は、本方法で使用することができる強力なセンサ検出値を与える適切な静止物体を含み得る。そのような適切な静止物体は、センサ較正を容易にするために、オペレータ又は他のサードパーティによって更に配置され得る。図1を参照すると、リモートサーバ160は、適切な較正領域に関する情報を記憶し、この情報を無線リンク150上で車両100に通信するように構成することができる。車両は、方法を実行することが推奨される領域に車両が入るときを検出することを可能にするGPS受信機などを含み得、良好な結果が予想され得る。例えば、適切な較正領域は、良好な視界及び適切な静止標的を有する道路の直線部分を含み得る。標的取り違えなどに関連する問題を回避するために、限られた数の頑丈な静止標的を有する環境で較正を行うことが好ましい場合がある。
According to some aspects, obtaining includes obtaining detection values when
いくつかの態様によれば、取得することは、車両センサ110のサイドローブに関連する検出値を拒否する(S14)ことを含む。サイドローブ検出値は、ボアサイトメインローブ方向に基づいて取得されないため、より大きな角度誤差に関連する。 According to some aspects, obtaining includes rejecting detections associated with sidelobes of vehicle sensors 110 (S14). Sidelobe detections are not obtained based on the boresight mainlobe direction and are therefore associated with larger angular errors.
この方法はまた、静止標的140に関連するグラウンドトゥルース値の対応するシーケンス220を決定する(S2)ことを含む。特に、グラウンドトゥルース値は、車両110から静止標的140までの最小検出距離に基づいて、かつ車両110の軌跡に基づいて決定される。最小検出距離は、図3に関連して上述した。
The method also includes determining a
いくつかの態様によれば、方法はまた、車両110の推定軌跡に基づいてグラウンドトゥルース値を調整する(S21)ことを含む。この方法は、図2に関連して説明された例の場合にそうであったように、直線での走行を必要としないが、むしろ、任意の車両軌跡を方法で使用することができる。次いで、最小距離が検出された時点まで、また潜在的にはその時点を超えて、センサ検出値の収集中に車両経路を考慮するようにグラウンドトゥルース値を調整する。センサ検出値のストリングの基準点は、繰り返しになるが、最小距離を有するポイントであり、これは、車両の真横の位置(少なくともフロントレーダシステムの場合)であると想定され得る。
According to some aspects, the method also includes adjusting (S21) the ground truth value based on the estimated trajectory of the
上述のように、この方法はまた、検出値のシーケンス210とグラウンドトゥルース値のシーケンス220との間の差250を推定する(S3)こと、及び推定された差250に基づいて角度測定122を較正する(S4)ことを含む。
As mentioned above, the method also includes estimating (S3) a
いくつかの態様によれば、差を推定することは、移動中央ウィンドウによって差をフィルタリングする(S31)ことを含む。移動中央値ウィンドウは、個々の結果をウィンドウ上の中央値に置き換える。中央値ウィンドウ又はフィルタの本旨は、エントリごとに信号を要約し、各エントリを隣接するエントリの中央値と置き換えることである。近隣のパターンは、「ウィンドウ」と呼ばれ、信号全体にわたってエントリごとにスライドする。1D信号の場合、最も明らかなウィンドウは、最初のいくつかの前のエントリ及び後のエントリである。このように測定誤差、及び外れ値の結果が抑制される。当然ながら、他のタイプのウィンドウもまた、この文脈で適用され得る。 According to some aspects, estimating the difference includes filtering (S31) the difference with a moving central window. A moving median window replaces individual results with the median over the window. The essence of the median window or filter is to summarize the signal entry by entry and replace each entry with the median of its neighboring entries. The pattern of neighbors is called a "window" and slides entry by entry throughout the signal. For 1D signals, the most obvious windows are the first few previous entries and later entries. In this way measurement errors and outlier results are suppressed. Of course, other types of windows can also be applied in this context.
いくつかの態様によれば、較正することは、取得された検出値のシーケンスに基づいて加重する(S41)ことを含む。検出値のいくつかのシーケンスは、例えば、高い信号対雑音比に関連し得、したがって、より弱い検出値により依存し得る。 According to some aspects, calibrating includes weighting (S41) based on the sequence of detected values obtained. Some sequences of detection values may, for example, be associated with high signal-to-noise ratios and thus may be more dependent on weaker detection values.
いくつかの態様によれば、較正することは、検出値を取得する間に車両軌跡に基づいて加重する(S42)ことを含む。例えば、直線は、多くの場合、より複雑な車両操縦軌跡よりも良好な結果をもたらす。 According to some aspects, calibrating includes weighting (S42) based on vehicle trajectory while obtaining detection values. For example, straight lines often give better results than more complex vehicle steering trajectories.
いくつかの態様によれば、較正は、拡張メモリフィルタ(growing memory filter)によってフィルタリングする(S43)ことを含む。このフィルタリングは、ノイズの影響を低減し、したがって最終結果を改善する。フィルタリングは、拡張メモリフィルタによる必要はなく、最も既知のノイズ抑制フィルタを、効果良く使用して較正結果を改善することができる。 According to some aspects, calibration includes filtering (S43) with a growing memory filter. This filtering reduces the effects of noise and thus improves the final result. Filtering need not be by extended memory filters, and most known noise suppression filters can be used effectively to improve calibration results.
図5は、車両100内の車両センサ110の角度測定122を較正するための制御ユニット130を概略的に示す。制御ユニットは、
静止標的140に関連する検出値のシーケンス210を取得するように構成された取得ユニットS1xと、
静止標的140に関連する対応するグラウンドトゥルース値のシーケンス220を決定するように構成された決定ユニットS2xであって、グラウンドトゥルース値は、車両100から静止標的140までの最小検出距離に基づいて、かつ車両100の軌跡に基づいて決定される、決定ユニットS2xと、
検出値のシーケンス210とグラウンドトゥルース値のシーケンス220との間の差250を推定するように構成された推定ユニットS3xと、
推定された差250に基づいて、角度測定122を較正するように構成された較正ユニットS4xと、を備える。
FIG. 5 schematically shows
an acquisition unit S1x configured to acquire a
a determining unit S2x configured to determine a
an estimation unit S3x configured to estimate a
a calibration unit S4x configured to calibrate the
図6は、本明細書に説明の一実施形態による、無線トランシーバ130の構成要素を、いくつかの機能ユニットの観点から概略的に示す。処理回路610は、コンピュータプログラム製品に記憶されたソフトウェア命令を、例えば、記憶媒体630の形態で実行することができる好適な中央処理装置(central processing unit、CPU)、マルチプロセッサ、マイクロコントローラ、デジタル信号プロセッサ(digital signal processor、DSP)などのうちの1つ以上の任意の組み合わせを使用して提供される。処理回路610は、少なくとも1つの特定用途向け集積回路(application specific integrated circuit、ASIC)、又はフィールドプログラマブルゲートアレイ(field programmable gate array、FPGA)として更に提供されてもよい。したがって、処理回路は、複数のデジタル論理構成要素を備える。
FIG. 6 schematically illustrates the components of
特に、処理回路610は、システム130に、一連の動作又はステップを実行させるように構成されている。例えば、記憶媒体630は一連の動作を記憶することができ、処理回路610は、記憶媒体630から一連の動作を取り出してシステム130に一連の動作を実行させるように構成することができる。動作のセットは、実行可能命令のセットとして提供されてもよい。したがって、処理回路610は、本明細書に開示される方法を実行するように構成される。
In particular, processing
記憶媒体630はまた、例えば、磁気メモリ、光学メモリ、固体メモリ、若しくは遠隔搭載メモリのいずれか1つ又はその組み合わせであり得る永続的ストレージを備え得る。
センサ信号処理システム130は、少なくとも1つの外部デバイスと通信するためのインターフェース620を更に備える。したがって、インターフェース620は、アナログ及びデジタル構成要素、並びに無線通信のための好適な数のポートを備える、1つ以上の送信機及び受信機を備えてもよい。
Sensor
処理回路610は、例えばデータ及び制御信号をインターフェース620及び記憶媒体630に送信することにより、インターフェース620からデータ及びレポートを受信することにより、並びに記憶媒体630からデータ及び命令を取り出すことにより、システム130の一般的な動作を制御する。本明細書で提示される概念を不明瞭にしないために、制御ノードの他の構成要素、並びに関連する機能は省略されている。
図7は、本明細書に開示される方法のうちのいずれかを実行するためのコンピュータ実行可能命令710を含むコンピュータプログラム製品700を示す。
FIG. 7 depicts a
Claims (12)
静止標的(140)に関連する検出値のシーケンス(210)を取得する(S1)ことであって、
前記車両センサ(110)に関連する標的リスト内の静止物体を検出する(S11)ことと、
前記車両(100)が走行しているときに検出値を取得する(S12)ことと
を含む、ことと、
前記静止標的(140)に関連する対応するグラウンドトゥルース値のシーケンス(220)を決定する(S2)ことであって、前記グラウンドトゥルース値は、前記検出値のシーケンス(210)に基づいて決定された前記車両(100)から前記静止標的(140)までの最小検出距離に基づいて、かつ前記車両(100)の軌跡に基づいて決定される、ことと、
前記検出値のシーケンス(210)と前記グラウンドトゥルース値のシーケンス(220)との間の差(250)を推定する(S3)ことと、
推定された前記差(250)に基づいて、前記角度測定(122)を較正する(S4)ことと、を含む方法。 A method for calibrating angle measurements (122) of vehicle sensors ( 110) in a vehicle, performed by a control unit (130) in the vehicle , the method comprising:
Obtaining (S1) a sequence of detection values (210) associated with a stationary target (140) , comprising:
detecting (S11) a stationary object in a target list associated with said vehicle sensor (110);
acquiring a detection value while the vehicle (100) is running (S12);
including
determining (S2) a sequence of corresponding ground truth values (220) associated with said stationary target (140), said ground truth values determined based on said sequence of detected values (210); determined based on a minimum detectable distance from the vehicle (100) to the stationary target (140) and based on a trajectory of the vehicle (100);
estimating (S3) a difference (250) between the sequence of detection values (210) and the sequence of ground truth values (220);
calibrating (S4) said angle measurement (122) based on said estimated difference (250).
静止標的(140)に関連する検出値のシーケンス(210)を取得するように構成された取得ユニット(S1x)であって、
前記車両センサ(110)に関連する標的リスト内の静止物体を検出する(S11)ことと、
前記取得することは、前記車両(100)が走行しているときに検出値を取得する(S12)ことと
を行うように構成される、ことと、
前記静止標的(140)に関連する対応するグラウンドトゥルース値のシーケンス(220)を決定するように構成された決定ユニット(S2x)であって、前記グラウンドトゥルース値は、前記検出値のシーケンス(210)に基づいて決定された前記車両(100)から前記静止標的(140)までの最小検出距離に基づいて、かつ前記車両(100)の軌跡に基づいて決定される、決定ユニット(S2x)と、
前記検出値のシーケンス(210)と前記グラウンドトゥルース値のシーケンス(220)との間の差(250)を推定するように構成された推定ユニット(S3x)と、
推定された前記差(250)に基づいて、前記角度測定(122)を較正するように構成された較正ユニット(S4x)と、を備える制御ユニット(130)。 A control unit (130) for calibrating angle measurements (122) of vehicle sensors (110) in a vehicle (100), said control unit (130) comprising:
an acquisition unit (S1x) configured to acquire a sequence of detection values (210) associated with a stationary target (140) , comprising:
detecting (S11) a stationary object in a target list associated with said vehicle sensor (110);
The acquiring means acquiring the detection value while the vehicle (100) is running (S12).
and
a determining unit (S2x) configured to determine a corresponding sequence of ground truth values (220) associated with said stationary target (140), said ground truth values being said sequence of detected values (210); a determining unit (S2x), determined based on the minimum detectable distance from the vehicle (100) to the stationary target (140) determined based on and based on the trajectory of the vehicle (100);
an estimation unit (S3x) configured to estimate a difference (250) between the sequence of detection values (210) and the sequence of ground truth values (220);
a calibration unit (S4x) configured to calibrate said angle measurement (122) based on said estimated difference (250).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19184424.0 | 2019-07-04 | ||
| EP19184424.0A EP3761054A1 (en) | 2019-07-04 | 2019-07-04 | Sensor calibration based on strings of detections |
| PCT/EP2020/068561 WO2021001444A1 (en) | 2019-07-04 | 2020-07-01 | Sensor calibration based on strings of detections |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022538676A JP2022538676A (en) | 2022-09-05 |
| JP7303365B2 true JP7303365B2 (en) | 2023-07-04 |
Family
ID=67180651
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022500001A Active JP7303365B2 (en) | 2019-07-04 | 2020-07-01 | Sensor calibration based on string of detected values |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3761054A1 (en) |
| JP (1) | JP7303365B2 (en) |
| WO (1) | WO2021001444A1 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4253994A1 (en) | 2022-03-29 | 2023-10-04 | Veoneer Sweden AB | Sensor calibration based on strings of detections |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19962997A1 (en) | 1999-12-24 | 2001-06-28 | Bosch Gmbh Robert | Calibrating a sensor system involves detecting sensor data as static or quasi-static objects taking into account object movement, feeding data to calibration unit for correction |
| JP2003057334A (en) | 2001-08-15 | 2003-02-26 | Fujitsu Ten Ltd | Detecting device for generation of shaft misalignment in horizontal direction of radar, shaft misalignment amount deciding device, and shaft misalignment correcting device |
| WO2007015288A1 (en) | 2005-08-01 | 2007-02-08 | Mitsubishi Denki Kabushiki Kaisha | Misalignment estimation method, and misalignment estimation device |
| DE102015119660A1 (en) | 2015-11-13 | 2017-05-18 | Valeo Schalter Und Sensoren Gmbh | Method for calibrating a sensor of a motor vehicle for angle measurement, computing device, driver assistance system and motor vehicle |
| JP2018025485A (en) | 2016-08-10 | 2018-02-15 | パナソニックIpマネジメント株式会社 | Radar installation angle calculation device, radar device, and method for calculating radar installation angle |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3266827B2 (en) * | 1997-06-25 | 2002-03-18 | 本田技研工業株式会社 | Vehicle object detection device |
| EP3290945A1 (en) * | 2016-09-02 | 2018-03-07 | Autoliv Development AB | Misalignment detection for a vehicle radar sensor |
-
2019
- 2019-07-04 EP EP19184424.0A patent/EP3761054A1/en active Pending
-
2020
- 2020-07-01 WO PCT/EP2020/068561 patent/WO2021001444A1/en active Application Filing
- 2020-07-01 JP JP2022500001A patent/JP7303365B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19962997A1 (en) | 1999-12-24 | 2001-06-28 | Bosch Gmbh Robert | Calibrating a sensor system involves detecting sensor data as static or quasi-static objects taking into account object movement, feeding data to calibration unit for correction |
| JP2003057334A (en) | 2001-08-15 | 2003-02-26 | Fujitsu Ten Ltd | Detecting device for generation of shaft misalignment in horizontal direction of radar, shaft misalignment amount deciding device, and shaft misalignment correcting device |
| WO2007015288A1 (en) | 2005-08-01 | 2007-02-08 | Mitsubishi Denki Kabushiki Kaisha | Misalignment estimation method, and misalignment estimation device |
| DE102015119660A1 (en) | 2015-11-13 | 2017-05-18 | Valeo Schalter Und Sensoren Gmbh | Method for calibrating a sensor of a motor vehicle for angle measurement, computing device, driver assistance system and motor vehicle |
| JP2018025485A (en) | 2016-08-10 | 2018-02-15 | パナソニックIpマネジメント株式会社 | Radar installation angle calculation device, radar device, and method for calculating radar installation angle |
Non-Patent Citations (1)
| Title |
|---|
| 原 六蔵 ほか,移動速度の外部計測を要しないオンボードレーダオフセット角推定法,電子情報通信学会論文誌,日本,社団法人電子情報通信学会,2009年02月01日,第J92-B巻 第2号,Pages: 469-474,ISSN: 1344-4697 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021001444A1 (en) | 2021-01-07 |
| EP3761054A1 (en) | 2021-01-06 |
| JP2022538676A (en) | 2022-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3151034B1 (en) | Automated vehicle radar system to determine yaw-rate of a target vehicle | |
| US10591584B2 (en) | Radar calibration with known global positioning of static objects | |
| JP7081046B2 (en) | How to detect angle measurement error in radar sensor | |
| US10310076B2 (en) | Driving lane detection device and driving lane detection method | |
| US12005907B2 (en) | Method for determining position data and/or motion data of a vehicle | |
| US9889798B1 (en) | Detection of a target object utilizing automotive radar | |
| WO2015034581A1 (en) | Method and apparatus for self calibration of a vehicle radar system | |
| JP6714148B2 (en) | Improved detection of target objects using automotive radar | |
| US11209524B2 (en) | Detection system and method for characterizing targets | |
| US11292481B2 (en) | Method and apparatus for multi vehicle sensor suite diagnosis | |
| JP2022188203A (en) | Measurement precision calculation device, self-position estimation device, control method, program and storage medium | |
| US11802770B2 (en) | Vehicle position identification device and vehicle position identification method | |
| KR20230116783A (en) | Magnetic Velocity Estimation Using Radar or LIDAR Beam Steering | |
| JP7303365B2 (en) | Sensor calibration based on string of detected values | |
| CN110678776B (en) | System for enhanced object tracking | |
| JP2024038322A (en) | Measurement device, measurement method, and program | |
| JP7526858B2 (en) | Measurement device, measurement method, and program | |
| US11119187B2 (en) | Resolution of doppler ambiguity in a radar system through tracking | |
| KR101356169B1 (en) | Fmcw radar system and radar sensor operation method of the same | |
| EP3971525B1 (en) | Self-position correction method and self-position correction device | |
| US11914028B2 (en) | Object detection device for vehicle | |
| JP6818902B6 (en) | Vehicle detection system | |
| JP2023068009A (en) | Map information creation method | |
| CN110542902B (en) | Simple height measurement method suitable for vehicle millimeter wave radar | |
| KR20140088683A (en) | Apparatus, method and computer readable recording medium for detecting an object using an automotive radar |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220103 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20220712 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221223 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230529 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230622 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7303365 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |