以下では、本発明に係る掃除地図表示装置等の実施の形態について、図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、いずれも本発明の好ましい一具体例を示すものである。したがって、以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置及び接続形態、ステップ、ステップの順序等は、一例であり、本発明を限定する主旨ではない。
なお、当業者が本発明を十分に理解するために添付図面及び以下の説明を提供するのであって、これらによって特許請求の範囲に記載の主題を限定することを意図するものではない。
また、各図は、模式図であり、必ずしも厳密に図示されたものではない。また、各図において、実質的に同一の構成に対しては同一の符号を付しており、重複する説明は省略又は簡略化される場合がある。
また、以下の実施の形態においては、略三角形等の「略」を用いた表現を用いている。例えば、略三角形とは、完全に三角形であることを意味するだけでなく、実質的に三角形である、すなわち、例えば角丸な三角形等も含むことも意味する。他の「略」を用いた表現についても同様である。
また、以下の実施の形態においては、フロアを走行して掃除する自律走行型掃除機を鉛直上方側から見た場合を上面視とし、鉛直下方側から見た場合を下面視として記載する場合がある。
(実施の形態1)
以下、実施の形態1に係る掃除地図表示装置100について、図1~図5を参照しながら説明する。
[構成]
<概要>
まず、実施の形態1に係る掃除地図表示装置100の構成について、図1~図4を参照しながら説明する。
図1は、実施の形態1に係る掃除地図表示装置100を含むシステムの全体構成を示す概略上面図である。
掃除地図表示装置100は、自律走行型掃除機200の遠隔掃除指示又は掃除結果を、自律走行型掃除機200が走行する部屋(フロア)400のフロアマップ上へ重畳させて表示する表示装置である。例えば、掃除地図表示装置100は、自律走行型掃除機200の移動軌跡を示す画像、及び、自律走行型掃除機200が吸引したごみの量を示すごみ量分布の画像を、部屋400の二次元地図画像であるフロアマップ上に重畳させて表示する表示装置である。
掃除地図表示装置100は、例えば、スマートフォン、タブレット端末等の携帯端末である。掃除地図表示装置100は、例えば、PC(Personal Computer)、専用の情報端末等でもよい。
掃除地図表示装置100と自律走行型掃除機200との間の通信は、無線LAN(Loacal Area Network)又はインターネット等の汎用的なネットワークシステムを介して行われる。本実施の形態では、掃除地図表示装置100は、ルータ300を介して自律走行型掃除機200と通信する。もちろん、掃除地図表示装置100は、自律走行型掃除機200とルータ300を介さずに直接通信してもよい。
実施の形態1に係る自律走行型掃除機200は、家屋内等の部屋400内のフロア(より具体的には、フロア面)上を自律的に走行し、フロア上のごみを吸引する、つまり、掃除するロボット型の掃除機である。
例えば、自律走行型掃除機200は、まず、カメラ210等を用いて部屋内を撮像しながら走り回ることで、部屋400のフロアマップ(地図画像)を示す地図情報(データ)を作成する。次に、自律走行型掃除機200は、作成した地図情報に基づいて、部屋400を掃除する際に走行する所定のルートを算出する。次に、自律走行型掃除機200は、算出した所定のルートで、部屋400内を走行して掃除する。
自律走行型掃除機200は、部屋400の様子をカメラ、及び、クリフセンサ等のセンサを用いて観測することにより、フロア上に存在する物体(障害物)を避けるかを自律的に判定し、障害物が存在する場合には所定のルートから離脱して当該障害物を避けながら走行して掃除する。自律走行型掃除機200は、例えば、部屋400の掃除をし終えたら、充電器410と電気的に接続されるように移動する。
自律走行型掃除機200は、例えば、SLAM(Simultaneous Localization and Mapping)により、掃除する部屋400の地図情報の作成と、作成した地図情報に示されるフロアマップにおける自律走行型掃除機200の自己位置の推定とを行う。
また、自律走行型掃除機200は、推定した複数の自己位置から、当該複数の自己位置を繋ぐことで、移動軌跡(掃除ルート)を算出し、算出した移動軌跡を軌跡情報(データ)として記憶する。
また、自律走行型掃除機200は、吸引したごみの量を検出する。自律走行型掃除機200は、例えば、フロアマップにおける自己位置とそこで吸引したごみの量とを紐づけたごみ量情報(データ)を作成して記憶する。
自律走行型掃除機200は、このように得られた地図情報、移動軌跡、及び、ごみ量情報を、掃除地図表示装置100へ送信する。具体的には、自律走行型掃除機200は、部屋400のフロアマップを示す地図情報、自律走行型掃除機の移動軌跡を示す軌跡情報、及び、フロアマップにおける位置に対する吸引したごみの量を示すごみ量情報を、掃除地図表示装置100へ送信する。
掃除地図表示装置100は、受信した地図情報、軌跡情報、及び、ごみ量情報に基づいて、自律走行型掃除機200の移動軌跡及び部屋400のごみ量の分布を、フロアマップに重畳させて表示する。さらに、掃除地図表示装置100は、移動軌跡を示す軌跡画像及びフロアマップのうちの少なくとも一方の特定の箇所を、他の箇所とは異なる表示態様で表示することで、当該特定の箇所をユーザにとって見やすくなるように強調させて表示する。
<自律走行型掃除機のハードウェア構成>
図2は、実施の形態に係る自律走行型掃除機200の外観を示す底面図である。
自律走行型掃除機200は、処理部230等の各種の構成要素が搭載されるボディ270と、駆動部280と、補助輪281と、処理部230と、各種センサと、を備える。
ボディ270は、各種の構成要素が搭載される筐体である。また、ボディ270の下面には、図示しないモータによって駆動される吸引ローラ279でごみをボディ270の内部に吸引するための吸引口278が設けられている。
駆動部280は、処理部からの指示に基づき自律走行型掃除機200を走行させる。駆動部280は、例えば、モータ、車輪等から構成される。本実施の形態においては、駆動部280が有する車輪は、ボディ270の上面視における幅方向の中心に対して左側及び右側にそれぞれ1つずつ配置されている。自律走行型掃除機200は、補助輪281を備えた対向二輪型であり、駆動部280が有する2つの車輪の回転が独立して制御されることで、直進、後退、左回転、右回転等、自在に走行することができる。
処理部230は、ボディ270の内部に配置されており、各種センサの制御、自律走行型掃除機200の制御等を行う処理部である。
処理部230は、例えば、記憶部290(図3参照)等のメモリと、当該メモリに記憶されている制御プログラムを実行するCPU(Central Processing Unit)とから実現される。
また、自律走行型掃除機200が備える各種センサとしては、以下の様なセンサを例示できる。
カメラ210は、自律走行型掃除機200の進行方向前方を撮影することで画像を生成する撮像装置である。また、自律走行型掃除機200は、カメラ210で撮影された画像を処理することで、障害物センサ273、測距センサ274等によって検出できないカーペット等の低背な障害物との距離を算出する。
なお、カメラ210は、例えば、ボディ270の上部空間の全周画像を撮影してもよい。自律走行型掃除機200は、カメラ210で撮影された画像を、画像処理部で処理し、画像内の特徴点の位置から自律走行型掃除機200の現在位置を把握してもよい。
障害物センサ273は、ボディ270の前方に存在する周囲の壁、家具等の走行の障害となる障害物を検出するセンサである。本実施の形態においては、障害物センサ273には、超音波センサが用いられる。
障害物センサ273は、ボディ270の前方の中央に配置される発信部271、及び、発信部271の両側にそれぞれ配置される受信部272を有し、発信部271から発信されて障害物によって反射して帰ってきた超音波を受信部272がそれぞれ受信することで、障害物の距離、位置等を検出することができる。
測距センサ274は、ボディ270の周囲に存在する障害物等の物体とボディ270との距離を検出する。本実施の形態においては、測距センサ274は、発光部及び受光部を有する赤外線センサであり、発光部で出射された赤外線が障害物で反射して戻ってくるまでの時間に基づき距離を測定する。測距センサ274は、例えば、右側の前方頂部、及び、左側の前方頂部にそれぞれ配置されている。右側の測距センサ274は、ボディ270の右斜め前方に向けて光を出力する。また、左側の測距センサ274は、ボディ270の左斜め前方に向けて光を出力する。このような構成により、自律走行型掃除機200が旋回するときに、測距センサ274は、ボディ270の輪郭と最も接近した周囲の物体とボディ270との距離を検出する。
床面センサ276は、ボディ270の底面の複数箇所に配置され、フロアの状態を検出する。本実施の形態においては、床面センサ276は、発光部及び受光部を有する赤外線センサであり、発光部で出射された赤外線がフロアで反射して戻ってきた赤外線の光量に基づいて、例えば、フロアが濡れている等のフロアの状態を検出する。
ごみ量センサ220は、自律走行型掃除機200が吸引したごみの量を検出する。ごみ量センサ220は、例えば、赤外線センサである。具体的には、ごみ量センサ220は、例えば、赤外線を発する発光素子、及び、赤外線を受光する受光素子からなり、受光素子が発光素子から放出された光の量を検出して出力する。出力された情報に基づいて、受光した光の量とごみの量とを対応させる。具体的には、光の量が少なくなる程、ごみの量が多くなると判断され、その検出結果を示すごみ量情報が生成される。
以上の障害物センサ273、測距センサ274、衝突センサ、床面センサ276、及び、ごみ量センサ220は、例示であり、自律走行型掃除機200は、全てのセンサを備えなくてもかまわない。また、上記とは異なるセンサを自律走行型掃除機200が備えてもかまわない。
例えば、自律走行型掃除機200は、自律走行型掃除機200の進行方向を算出するために用いられるオドメトリ情報を検出するためのセンサを有してもよい。
また、本実施の形態では、自律走行型掃除機200は、上面視において、略三角形状である。なお、自律走行型掃除機200の上面視における形状は、特に限定されない。自律走行型掃除機200の上面視形状は、例えば、略矩形状でもよいし、略円形状でもよい。
<機能構成>
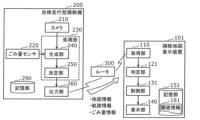
図3は、実施の形態1に係る掃除地図表示装置100及び自律走行型掃除機200の特徴的な機能構成を示すブロック図である。
掃除地図表示装置100は、取得部110と、判定部120と、制御部130と、表示部140と、記憶部150と、を備える。
取得部110は、フロアマップを示す地図情報及び自律走行型掃除機200の移動軌跡を示す軌跡情報を取得する。具体的には、取得部110は、自律走行型掃除機200と通信することで、地図情報及び軌跡情報を受信することで取得する。本実施の形態では、取得部110は、例えば、地図情報と、軌跡情報と、ごみ量情報と、自律走行型掃除機200が地図情報に基づいて算出した所定のルートを示すルート情報と、自律走行型掃除機200の走行の妨げとなる障害物の位置を示す障害物情報とを取得する。
取得部110は、例えば、自律走行型掃除機200(本実施の形態では、ルータ300)と通信するための無線通信回路等を含む通信インターフェースである。
判定部120は、フロアマップ及び移動軌跡において、所定の条件を満たす位置を判定する処理部である。具体的には、判定部120は、部屋400を自律的に走行する自律走行型掃除機200が走行した移動軌跡のうち、所定の条件を満たす位置を判定する。
制御部130は、判定部120により判定された位置に対応する箇所を他の箇所と表示態様を異ならせた画像を表示部140に表示させる処理部である。本実施の形態では、制御部130は、自律走行型掃除機200の移動軌跡を示す軌跡画像421(図4参照)であって、判定部120により所定の条件を満たすと判定された位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421(図4参照)と、部屋400のフロアマップ420(図4参照)とを表示部140に表示させる。
判定部120及び制御部130は、例えば、CPU(Central Processing Unit)と、記憶部150に記憶されている当該CPUが実行する制御プログラムとにより実現される。
表示部140は、画像を表示する表示装置である。
表示部140は、例えば、液晶ディスプレイ、有機EL(Electro Luminescence)ディスプレイ等のディスプレイである。
図4は、実施の形態1に係る掃除地図表示装置100が備える表示部140に表示される画像の一例を示す図である。
表示部140は、例えば、フロアマップ420と、フロアマップ420に重畳表示された自律走行型掃除機200の移動軌跡を示す軌跡画像421と、ごみ量画像422と、障害物画像423と、を表示する。より具体的には、制御部130は、軌跡画像421と、ごみ量画像422と、障害物画像423とをフロアマップ420に重畳させて表示部140に表示させる。
ごみ量画像422は、自律走行型掃除機200が吸引したごみの量を示すごみ量情報に基づく部屋400でのごみの量の分布を示す画像である。
障害物画像423は、自律走行型掃除機200が所定のルートから離脱して走行した箇所に位置する物体の位置を示す画像である。
ユーザは、表示部140に表示されているフロアマップ420、並びに、フロアマップ420に重畳表示されている軌跡画像421及びごみ量画像422を視認することで、自律走行型掃除機200の具体的な掃除のルート(つまり、移動軌跡)等を確認できる。
ここで、フロアマップ420上には複数の情報が重畳して表示されているために、ユーザにとって軌跡画像421等の一部が視認しにくくなる懸念がある。そこで、制御部130は、所定の条件を満たす特定の箇所を他の箇所と表示態様を異ならせて表示部140に表示させる。こうすることで、ユーザが特に視認すべき重要と考えられる箇所を強調して表示させることができるため、ユーザにとって視認し易い画像となる。
例えば、判定部120は、自律走行型掃除機200が所定のルートとは異なるルートを走行した位置、言い換えると、所定のルートから離脱して走行した位置を、所定の条件を満たす位置として判定する。
自律走行型掃除機200は、例えば、まず、SLAMによって、部屋400の間取りを示すフロアマップ420を示す地図情報を生成し、生成した地図情報に基づいて、掃除するルートである所定のルートを算出する。自律走行型掃除機200は、算出した所定のルートを示す情報であるルート情報及び軌跡情報を掃除地図表示装置100に送信する。取得部110は、ルート情報を取得する。判定部120は、取得部110が取得したルート情報と軌跡情報とに基づいて、移動軌跡のうち、所定のルートから離脱している位置を判定する。
また、例えば、判定部120は、移動軌跡のうち、自律走行型掃除機200が障害物を回避することで、所定のルートとは異なるルートで走行した位置を、所定の条件を満たす位置として判定する。つまり、判定部120は、障害物を回避して走行した位置を、所定の条件を満たす位置として判定する。
なお、障害物を回避して走行したか否かの判定は、任意でよい。
判定部120は、例えば、所定のルートを離脱して走行した場合に、障害物を回避して走行したと判定してもよい。
或いは、判定部120は、自律走行型掃除機200が備えるカメラ210から画像を取得して、取得した画像を画像解析することで当該画像に障害物が含まれているか否を判定し、障害物が含まれており、且つ、所定のルートから移動軌跡が外れている場合、障害物を回避して走行したと判定してもよい。
或いは、自律走行型掃除機200は、障害物の位置を示す障害物情報を掃除地図表示装置100に送信してもよい。取得部110は、例えば、当該障害物情報を受信することで取得する。また、例えば、判定部120は、取得部110が取得した障害物情報に基づいてフロアマップ420における障害物の位置を判定し、判定した位置の近傍(例えば、1m以内等)で所定のルートから離脱したルートを自律走行型掃除機200が障害物を回避して走行した位置として判定する。
本実施の形態では、判定部120は、所定のルートとは異なるルートで自律走行型掃除機200が走行した位置を、障害物を避けて走行した箇所として判定している。また、制御部130は、判定部120が判定した箇所の移動軌跡を他の移動軌跡より線幅を太くすることで、表示態様を異ならせた軌跡画像421を表示部140に表示させている。
なお、障害物情報には、障害物のサイズ、種別等を示す情報が含まれていてもよい。制御部130は、障害物のサイズ、種別等に基づいて、障害物画像423の表示態様を変更してもよい。
また、図4では、ごみの量を異なるハッチングを用いた画像で4段階に分けて示しているが、表示態様、及び、ごみの量の分類の段階数は、特に限定されない。例えば、ごみの量は、ごみが無いレベル0から最も多いレベル7までの8段階に分けられていてもよい。また、表示部140に表示されるごみの量は、色により区別されていてもよい。
また、軌跡画像421の表示態様の分け方は、線幅によるものに限定されない。例えば、線の色で区別されていてもよいし、点線、破線等で区別されていてもよい。
記憶部150は、判定部120及び制御部130が実行する制御プログラム等を記憶するメモリである。
記憶部150は、例えば、HDD(Hard Disk Drive)、フラッシュメモリ等により実現される。
自律走行型掃除機200は、カメラ210と、ごみ量センサ220と、処理部230と、出力部260と、記憶部290と、を備える。
カメラ210は、自律走行型掃除機200が走行する部屋400の間取りを示すフロアマップ420を示す地図情報を生成するために、自律走行型掃除機200の周囲を撮像する。
ごみ量センサ220は、自律走行型掃除機200が吸引したごみの量を検出する。ごみ量センサ220は、例えば、赤外線センサである。
処理部230は、自律走行型掃除機200の各種制御を実行する処理部である。処理部230は、例えば、記憶部290に記憶されている制御プログラムと、当該制御プログラムを実行するCPUとにより実現される。
処理部230は、機能的には、生成部240と、決定部250と、を含む。
生成部240は、例えば、カメラ210が撮像した自律走行型掃除機200の周囲の情報及び自律走行型掃除機200が備えるセンサが検出したオドメトリ情報等に基づいて、フロアマップ420(より具体的には、フロアマップを示す地図情報)を生成する。フロアマップ420は、例えば、SLAMにより得られる環境地図等の画像である。
また、生成部240は、地図情報に基づいて、部屋400を走行するルートである所定のルートを算出する。具体的には、生成部240は、所定のルートを示すルート情報を生成する。
また、生成部240は、生成したフロアマップ420における自律走行型掃除機200の位置を算出する。例えば、生成部240は、自律走行型掃除機200が走行中、掃除中等において自律走行型掃除機200が備える各種センサから取得した情報に基づき、自己位置推定技術により得られる複数箇所における自己位置情報を生成する。
また、生成部240は、例えば、障害物を検出した場合には、障害物の位置等を示す障害物情報を生成する。
また、処理部230は、例えば、各種センサが検出した情報から算出される自律走行型掃除機200の位置に基づいて、駆動部280等を制御することで、自律走行型掃除機200の進行方向等を制御する。
なお、自律走行型掃除機200が加速度センサを備える場合、当該加速度センサから取得される情報に基づいて自律走行型掃除機200の位置及び進行方向を取得してもよい。
また、例えば、処理部230は、吸引口278からごみを吸い込ませる等、フロアの掃除を制御する。その際に、生成部240は、ごみ量センサ220の検出結果に基づいて、フロアマップ420の各位置におけるごみの量の分布を示すごみ量情報を生成する。
決定部250は、生成部240で生成された地図情報及び自己位置情報に基づいて、移動軌跡を算出する処理部である。具体的には、決定部250は、自己位置情報に基づいて、例えば、複数の自己位置を繋いだルートを算出することで、自律走行型掃除機200が走行した移動軌跡を示す軌跡情報を生成する。
出力部260は、生成部240及び決定部250で得られた地図情報、軌跡情報、ごみ量情報、ルート情報、及び、障害物情報を掃除地図表示装置100へ出力する。具体的には、処理部230(例えば、決定部250)は、地図情報、軌跡情報、ごみ量情報、ルート情報、及び、障害物情報を出力部260に出力させる。出力部260は、例えば、掃除地図表示装置100(本実施の形態では、ルータ300)と通信するための無線通信回路等を含む通信インターフェースである。
記憶部290は、処理部230が実行する制御プログラムが記憶するメモリである。記憶部290は、例えば、HDD(Hard Disk Drive)、フラッシュメモリ等により実現される。
[動作]
続いて、掃除地図表示装置100の動作について、図5を参照しながら説明する。
図5は、実施の形態1に係る掃除地図表示装置100の動作を示すフローチャートである。
まず、掃除地図表示装置100は、動作を開始すると、ルート情報、軌跡情報、ごみ量情報、及び、地図情報を自律走行型掃除機200から取得する(ステップS101)。掃除地図表示装置100が動作を開始するタイミングは、任意でよい。ユーザが掃除地図表示装置100の電源をONにしたタイミングでもよいし、所定のアプリを立ち上げたタイミングでもよい。ステップS101では、例えば、判定部120は、取得部110に自律走行型掃除機200と通信させることで、自律走行型掃除機200から各情報を取得部110に取得させる。
なお、掃除地図表示装置100が障害物画像423を表示する場合、ステップS101では、取得部110は、障害物情報をさらに取得してもよい。
次に、判定部120は、取得部110が取得した軌跡情報が示す移動軌跡のうち、所定の条件を満たす位置を判定する(ステップS102)。本実施の形態では、ステップS102では、判定部120は、移動軌跡のうち、自律走行型掃除機200が所定のルートとは異なるルートで走行した位置を、所定の条件を満たす位置として判定する。より具体的には、判定部120は、障害物情報に基づいて、移動軌跡のうち、自律走行型掃除機200が障害物を回避することで所定のルートとは異なるルートで走行した位置を、所定の条件を満たす位置として判定する。
次に、制御部130は、判定部120により所定の条件を満たすと判定された位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421と、フロアマップ420と、ごみ量画像422とを、フロアマップ420に軌跡画像421及びごみ量画像422を重畳させて表示部140に表示させる(ステップS103)。本実施の形態では、制御部130は、さらに、障害物画像423をフロアマップ420に重畳させて表示部140に表示させている。
ステップS103では、制御部130は、例えば、軌跡画像421で示される移動軌跡全体の線幅をまず決定する。さらに、制御部130は、移動軌跡全体の線幅のうち、判定部120により判定された位置に対応する箇所の線幅を、他の箇所よりも太くなるように決定する。各箇所の線幅は、任意に定められてよく、特に限定されない。例えば、制御部130は、ステップS103では移動軌跡全体の線幅を1[pixel]と決定し、判定部120に判定された位置に対応する箇所の線幅を3[pixel]と決定する。
なお、ステップS103では、制御部130は、図4に示すように、例えば、軌跡画像421及びごみ量画像422等が重畳表示されたフロアマップ420だけでなく、ごみ量画像422が示すハッチングの意味を説明する凡例等を表示部140に表示させてもよい。
[効果等]
以上のように、実施の形態1に係る掃除地図表示装置100は、画像を表示する表示部140と、部屋400を自律的に走行する自律走行型掃除機200が走行した移動軌跡のうち、所定の条件を満たす位置を判定する判定部120と、移動軌跡を示す軌跡画像421であって、判定部120により所定の条件を満たすと判定された位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421と、部屋400のフロアマップ420とを表示部140に表示させる制御部130と、を備える。
自律走行型掃除機200の軌跡画像421をフロアマップ420に重畳して表示するにあたり、軌跡画像421に表示される移動軌跡が縦横に入り組んだり密集していたりすると、移動軌跡が見えにくい箇所が存在する、つまり、視認性が悪い箇所が存在することになる。特に、本実施の形態のように、例えば、表示部140がフロアマップ420に軌跡画像421だけでなくごみ量画像422等の画像を重畳させて表示する場合には、フロアマップ420上に表示される画像の情報量が増えるために、移動軌跡がさらに見にくくなってしまう。
そこで、判定部120は、例えば、移動軌跡(つまり、移動軌跡を示す軌跡情報)に基づいて、視認性が悪い箇所を判定する。さらに、制御部130は、判定部120の判定結果に基づいて、軌跡画像421の一部の線幅を変える等にして当該一部の表示態様を異ならせた軌跡画像421を表示部140に表示させる。このような構成によれば、表示部140は、軌跡画像421の一部が強調して表示されることとなる。このように、掃除地図表示装置100によれば、特定の箇所を見やすく表示できる。また、例えば、障害物が存在する箇所又は入り組んだ箇所等は、自律走行型掃除機200の掃除結果としてユーザが特に部屋400で直接確認したくなる箇所であることが多い。そのため、掃除地図表示装置100は、このような箇所を強調して表示することで、視認性が悪く且つユーザが確認したくなる箇所の視認性を向上させることができる。
また、例えば、判定部120は、移動軌跡のうち、自律走行型掃除機200が所定のルートとは異なるルートで走行した位置を、所定の条件を満たす位置として判定する。
このような構成によれば、例えば、自律走行型掃除機200が予め定められた所定のルートとは一部異なるルートを走行した場合に、当該一部のルートを強調させることができる。これにより、ユーザは、例えば、自律走行型掃除機200によって適切に掃除されたか否かが特に気になる特定の位置を表示部140に表示されたフロアマップを確認することで簡便に把握できる。
また、例えば、判定部120は、移動軌跡のうち、自律走行型掃除機200が障害物を回避することで異なるルートで走行した位置を、所定の条件を満たす位置として判定する。
このような構成によれば、ユーザは、例えば、自律走行型掃除機200によって適切に掃除されたか否かが特に気になる特定の位置を表示部140に表示されたフロアマップ420を確認することで簡便に把握できる。また、障害物が存在する近傍が強調して表示されることとなるため、ユーザは、自律走行型掃除機200の走行の妨げとなる障害物の位置を把握しやすくなる。そのため、ユーザに対して、障害物の移動等を促しやすくし得る。
また、実施の形態1に係る掃除地図表示方法は、部屋400を自律的に走行する自律走行型掃除機200が走行した移動軌跡のうち、所定の条件を満たす位置を判定する判定ステップと、移動軌跡を示す軌跡画像421であって、判定ステップで所定の条件を満たすと判定した位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421と、部屋400のフロアマップ420とを表示部140に表示させる制御ステップと、を含む。
このような方法によれば、自律走行型掃除機200の掃除結果としてユーザが確認すべき箇所、例えば、障害物が存在する箇所又は入り組んだ箇所等を強調して表示することで、ユーザが確認すべき箇所の視認性が向上するため、ユーザは、当該箇所を確認しやすくなる。つまり、掃除地図表示装置100によれば、特定の箇所を見やすく表示できる。
また、例えば、判定ステップでは、移動軌跡のうち、自律走行型掃除機200が所定のルートとは異なるルートで走行した位置を、所定の条件を満たす位置として判定する。
このような方法によれば、ユーザは、例えば、自律走行型掃除機200によって適切に掃除されたか否かが特に気になる特定の位置を表示部140に表示されたフロアマップを確認することで簡便に把握できる。
また、例えば、判定ステップでは、移動軌跡のうち、自律走行型掃除機200が障害物を回避することで異なるルートで走行した位置を、所定の条件を満たす位置として判定する。
このような方法によれば、ユーザは、自律走行型掃除機200の走行の妨げとなる障害物の位置を把握しやすくなる。そのため、ユーザに対して、障害物の移動等を促しやすくし得る。
(実施の形態2)
続いて、図1、図4、図6~図8を参照しながら、実施の形態2に係る掃除地図表示装置について説明する。なお、実施の形態2に係る掃除地図表示装置に説明については、実施の形態1に係る掃除地図表示装置との差異点を中心に説明し、実施の形態1に係る掃除地図表示装置と実質的に同様の構成については同様の符号を付し、説明を簡略化又は省略する場合がある。
なお、図1及び図4について、実施の形態2においては、掃除地図表示装置100が掃除地図表示装置101となる以外は実質的に同様である。
[構成]
まず、図1、図4及び図6を参照しながら、実施の形態2に係る掃除地図表示装置の構成について説明する。
図6は、実施の形態2に係る掃除地図表示装置101の特徴的な機能構成を示すブロック図である。
掃除地図表示装置101は、取得部110と、判定部121と、制御部131と、表示部140と、記憶部151と、を備える。
取得部110は、フロアマップ420を示す地図情報及び自律走行型掃除機200の移動軌跡を示す軌跡情報を取得する。本実施の形態では、取得部110は、さらに、ごみ量情報を取得する。例えば、図4に示すように、表示部140が障害物画像423を表示する場合、取得部110は、障害物情報を取得してもよい。
判定部121は、移動軌跡のうち、所定の条件を満たす位置を判定する処理部である。
具体的には、判定部121は、部屋400を自律的に走行する自律走行型掃除機200が走行した移動軌跡のうち、所定の条件を満たす位置を判定する。
制御部131は、判定部121により判定された位置に対応する箇所を他の箇所と表示態様を異ならせた画像を表示部140に表示させる処理部である。本実施の形態では、制御部131は、自律走行型掃除機200の移動軌跡を示す軌跡画像421であって、判定部120により所定の条件を満たすと判定された位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421と、部屋400のフロアマップ420(図4参照)とを表示部140に表示させる。
判定部121及び制御部131は、例えば、CPUと、記憶部150に記憶されている当該CPUが実行する制御プログラムとにより実現される。
判定部121は、自律走行型掃除機200が複雑な走行をした位置を、所定の条件を満たす位置として判定する。
判定部121が、自律走行型掃除機200が複雑な走行をしたと判定する判定基準は、特に限定されない。例えば、判定部121は、所定のルートから離脱したルートを走行した回数をカウントし、カウントした回数が任意の閾値を超えた場合に、自律走行型掃除機200が複雑な走行をしたと判定してもよい。この場合、取得部110は、例えば、ルート情報を取得する。また、この場合、記憶部151は、当該任意の閾値を記憶部151に記憶していてもよい。
本実施の形態では、判定部121は、自律走行型掃除機200の移動軌跡のうち、複数の箇所の移動軌跡におけるそれぞれの直進率を算出し、移動軌跡における複数の箇所それぞれのうち、所定の閾値(第1閾値)より直進率が低い箇所を複雑な走行をした箇所として判定する。より具体的には、判定部121は、移動軌跡を所定の長さごとに複数の位置に分割し、複数の位置のそれぞれにおける屈曲回数をカウントし、カウントした屈曲回数に基づいて複数の位置のそれぞれにおける直進率を算出し、算出した直進率が所定の閾値より低いか否かを判定し、直進率が所定の閾値より低いと判定した位置を、複雑な走行をした位置として判定する。
所定の閾値は、予め任意に定められていればよく、特に限定されない。所定の閾値は、例えば、閾値情報161として記憶部151に記憶されている。また、所定の長さは、予め任意に定められていればよく、特に限定されない。所定の長さを示す情報は、例えば、所定の閾値と共に閾値情報161として予め記憶部151に記憶されていてもよい。
判定部121及び制御部131は、例えば、CPUと、記憶部151に記憶されている当該CPUが実行する制御プログラムとにより実現される。
記憶部151は、判定部121が判定に用いる閾値を示す閾値情報161、判定部121及び制御部131が実行する制御プログラム等を記憶するメモリである。
記憶部151は、例えば、HDD、フラッシュメモリ等により実現される。
[動作]
続いて、掃除地図表示装置101の動作について、図7及び図8を参照しながら説明する。
図7は、実施の形態2に係る掃除地図表示装置101の動作を示すフローチャートである。
まず、掃除地図表示装置101は、動作を開始すると、移動軌跡を示す軌跡情報を自律走行型掃除機200から取得する(ステップS201)。掃除地図表示装置101が動作を開始するタイミングは、任意でよい。ユーザが掃除地図表示装置101の電源をONにしたタイミングでもよいし、所定のアプリを立ち上げたタイミングでもよい。ステップS201では、例えば、判定部121は、取得部110に自律走行型掃除機200と通信させることで、自律走行型掃除機200から自律走行型掃除機200の移動軌跡を示す軌跡情報を取得部110に取得させる。
次に、判定部121は、移動軌跡を所定の長さごとに複数の位置に分割する(ステップS202)。所定の長さは、予め任意に定められてよい。本実施の形態では、所定の長さは、1[m]である。ステップS202では、判定部121は、移動軌跡を1[m]の長さごとに分割する。
次に、判定部121は、分割した移動軌跡の任意の位置での屈曲回数(折進回数)をカウントする(ステップS203)。
図8は、実施の形態2に係る掃除地図表示装置101(具体的には、判定部121)が直進率を算出する処理手順を説明するための図である。
判定部121は、例えば、自律走行型掃除機200が算出したそれぞれの自己位置を繋ぐ線分で構成される移動軌跡について、自律走行型掃除機200の進行方向に対する屈曲角度[°](≦180[°])を推定した自己位置ごとに取得し、屈曲角度が45[°]以上であれば屈曲回数を1[回]とカウントする。
例えば、図8に示す区間では、20[°]、30[°]、110[°]、及び、20[°]の4つの屈曲角度があり、45[°]以上である110[°]が1つあるので、判定部121は、屈曲回数を1[回]とカウントする。
再び図7を参照し、次に、判定部121は、屈曲回数をカウントした位置の直進率を算出する(ステップS204)。ステップS204では、例えば、判定部121は、以下の式(1)を用いて直進率を算出する。
(直進率)[%]=100÷(1+(屈曲回数)[回]) 式(1)
判定部121は、例えば、算出した直進率が25[%]より低い位置を複雑な走行をした位置と判定する。この場合、25%が閾値情報161として記憶部151に記憶されている。
なお、判定部121が屈曲したとカウントする屈曲角度は、特に限定されない。判定部120が屈曲したとカウントする屈曲角度は、45[°]以上でもよいし、45[°]以下でもよい。
また、閾値情報161に含まれる数値は、25[%]に限定されるものではなく、25[%]以上でもよいし、25[%]以下でもよい。
また、判定部121は、所定の長さでは余りがでる等の理由により移動軌跡を等分割できない場合、屈曲回数を分割した長さで割る等して、所定の長さにあわせて直進率を補正してもよい。
次に、判定部121は、直進率の算出が、複数の位置それぞれおいて終了したか、つまり、移動軌跡全体について終了したか否かを判定する(ステップS205)。
判定部121は、直進率の算出が、移動軌跡全体について終了していない判定した場合(ステップS205でNo)、ステップS203に戻り、直進率を算出していない位置について直進率の算出を行う。
一方、判定部121が、直進率の算出が、移動軌跡全体について終了した判定した場合(ステップS205でYes)、取得部110は、地図情報及びごみ量情報を自律走行型掃除機200から取得する(ステップS206)。具体的には、ステップS206では、例えば、判定部121は、取得部110に自律走行型掃除機200と通信させることで、地図情報及びごみ量情報を自律走行型掃除機200から取得部110に取得させる。
次に、判定部121は、複数の位置それぞれについて、算出した直進率が所定の閾値より低いか否かを判定する(ステップS207)。ステップS207では、判定部121は、算出した直進率が所定の閾値より低い位置を、複雑な走行を位置と判定する。
次に、制御部131は、判定部121により判定された位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421と、フロアマップ420と、ごみ量画像422とを、フロアマップ420に軌跡画像421及びごみ量画像422を重畳させて表示部140に表示させる(ステップS208)。
ステップS208では、制御部131は、例えば、軌跡画像421で示される移動軌跡全体の線幅をまず決定する。さらに、制御部131は、移動軌跡全体の線幅のうち、判定部121により判定された位置に対応する箇所の線幅を、他の箇所よりも太くなるように決定する。各箇所の線幅は、任意に定められてよく、特に限定されない。例えば、制御部131は、ステップS208では移動軌跡全体の線幅を1[pixel]と決定し、判定部121に判定された位置に対応する箇所の線幅を3[pixel]と決定する。さらに、制御部131は、決定した線幅の軌跡画像421及びごみ量画像422をフロアマップ420に重畳させて表示部140に表示させる。
なお、ステップS206は、ステップS201で実行されてもよい。この場合、ステップS205でYesの後には、ステップS207が実行される。
[効果等]
以上のように、実施の形態2に係る掃除地図表示装置101は、画像を表示する表示部140と、部屋400を自律的に走行する自律走行型掃除機200が走行した移動軌跡のうち、所定の条件を満たす位置を判定する判定部121と、移動軌跡を示す軌跡画像421であって、判定部121により所定の条件を満たすと判定された位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421と、部屋400のフロアマップ420とを表示部140に表示させる制御部131と、を備える。実施の形態2に係る掃除地図表示装置101においては、判定部121は、移動軌跡のうち、複雑な走行をした位置を、所定の条件を満たす位置として判定する。
自律走行型掃除機200が複雑な走行をした位置は、移動軌跡が入り組んでしまい視認性が悪い可能性が高い。そのため、このような構成によれば、判定部121は、移動軌跡を示す軌跡画像421において視認性が悪い可能性が高い箇所を強調して表示させることで、ユーザに見やすくすることができる。
また、例えば、判定部121は、移動軌跡を所定の長さごとに複数の位置に分割し、複数の位置のそれぞれにおける屈曲回数をカウントし、カウントした屈曲回数に基づいて複数の位置のそれぞれにおける直進率を算出し、算出した直進率が所定の閾値より低いか否かを判定し、直進率が所定の閾値より低いと判定した位置を、複雑な走行をした位置として判定する。
このような構成によれば、判定部121は、何度も右左折をしたり曲がりくねった走行をすることで軌跡画像421に示される移動軌跡が見えにくい可能性が高くなる箇所を強調して表示させることができる。
また、実施の形態2に係る掃除地図表示方法は、実施の形態1に係る掃除地図表示方法と同様に、部屋400を自律的に走行する自律走行型掃除機200が走行した移動軌跡のうち、所定の条件を満たす位置を判定する判定ステップと、移動軌跡を示す軌跡画像421であって、判定ステップで所定の条件を満たすと判定した位置に対応する箇所を他の箇所と表示態様を異ならせた軌跡画像421と、部屋400のフロアマップ420とを表示部140に表示させる制御ステップと、を含む。実施の形態2に係る掃除地図表示方法の判定ステップでは、移動軌跡のうち、複雑な走行をした位置を、所定の条件を満たす位置として判定する。
このような方法によれば、移動軌跡を示す軌跡画像421において視認性が悪い可能性が高い箇所を強調して表示させることで、ユーザに見やすくすることができる。
また、例えば、判定ステップでは、移動軌跡を所定の長さごとに複数の位置に分割し、複数の位置のそれぞれにおける屈曲回数をカウントし、カウントした屈曲回数に基づいて複数の位置のそれぞれにおける直進率を算出し、算出した直進率が所定の閾値より低いか否かを判定し、直進率が所定の閾値より低いと判定した位置を、複雑な走行をした位置として判定する。
このような方法によれば、何度も右左折をしたり曲がりくねった走行をすることで軌跡画像421に示される移動軌跡が見えにくい可能性が高くなる箇所を強調して表示させることができる。
(実施の形態3)
続いて、図1、図9~図12を参照しながら、実施の形態3に係る掃除地図表示装置について説明する。なお、実施の形態3に係る掃除地図表示装置に説明については、実施の形態1又は2に係る掃除地図表示装置との差異点を中心に説明し、実施の形態1又は2に係る掃除地図表示装置と実質的に同様の構成については同様の符号を付し、説明を簡略化又は省略する場合がある。
なお、図1について、実施の形態3においては、掃除地図表示装置100が掃除地図表示装置102となる以外は実質的に同様である。
[構成]
まず、実施の形態3に係る掃除地図表示装置102の構成について、図9及び図10を参照しながら説明する。
図9は、実施の形態3に係る掃除地図表示装置102の特徴的な機能構成を示すブロック図である。図10は、実施の形態3に係る掃除地図表示装置102が備える表示部140に表示される画像の一例を示す図である。
掃除地図表示装置102は、取得部110と、判定部122と、制御部132と、表示部140と、記憶部152と、を備える。
取得部110は、フロアマップ420aを示す地図情報及び自律走行型掃除機200の移動軌跡を示す軌跡情報を取得する。本実施の形態では、取得部110は、さらに、ごみ量情報を取得する。例えば、図4に示すように、表示部140が障害物画像423を表示する場合、取得部110は、障害物情報を取得してもよい。
判定部122は、フロアマップ420a及び軌跡画像421aにおいて、所定の条件を満たす位置を判定する処理部である。
本実施の形態では、判定部122は、部屋400を自律的に走行する自律走行型掃除機200が走行するフロアマップ420aのうち、所定の条件を満たす位置を判定する。より具体的には、判定部122は、自律走行型掃除機200が走行して掃除する部屋400のフロアマップ420aの外周を所定の長さごとに複数の位置に分割し、複数の位置のそれぞれにおける屈曲回数をカウントし、カウントした屈曲回数に基づく直進率を算出し、算出した直進率が所定の閾値(第2閾値)より低い位置を判定する。
制御部132は、判定部122により判定された位置に対応する箇所を他の箇所と表示態様を異ならせた画像を表示部140に表示させる処理部である。本実施の形態では、制御部132は、判定部122により判定された位置を他の位置と表示態様を異ならせたフロアマップ420aと、自律走行型掃除機200が走行した移動軌跡を示す軌跡画像421aとごみ量画像422とを表示部140に表示させる。
判定部122及び制御部132は、例えば、CPUと、記憶部152に記憶されている当該CPUが実行する制御プログラムとにより実現される。
また、本実施の形態では、判定部121は、フロアマップ420のうち判定した箇所の近傍に移動軌跡が位置しているか否かを判定する。制御部131は、フロアマップ420のうちで判定部121に特定された箇所の近傍の移動軌跡の一部を、他の箇所の移動軌跡と表示態様を異ならせた軌跡画像421aを表示部140に表示させる。
判定部122が判定する移動軌跡の一部の算出方法は、特に限定されない。例えば、判定部122は、判定したフロアマップ420aの外周から1[m]以内に位置する移動軌跡を一部の移動軌跡として判定する。
所定の閾値は、予め任意に定められていればよく、特に限定されない。所定の閾値は、例えば、閾値情報162として記憶部152に記憶されている。また、所定の長さは、予め任意に定められていればよく、特に限定されない。所定の長さを示す情報は、例えば、所定の閾値と共に閾値情報162として予め記憶部152に記憶されていてもよい。
また、本実施の形態では、制御部132は、判定部122が判定した箇所のフロアマップの外周を他の箇所より線幅を太くすることで、表示態様を異ならせたフロアマップ420aを表示部140に表示させている。
なお、フロアマップ420aの表示態様の分け方は、線幅によるものに限定されない。例えば、線の色で区別されていてもよいし、点線、破線等で区別されていてもよい。
記憶部152は、判定部122が判定に用いる閾値、判定部122及び制御部132が実行する制御プログラム等を記憶するメモリである。
記憶部152は、例えば、HDD、フラッシュメモリ等により実現される。
[動作]
続いて、掃除地図表示装置102の動作について、図11及び図12を参照しながら説明する。
図11は、実施の形態3に係る掃除地図表示装置102の動作を示すフローチャートである。
まず、掃除地図表示装置102は、動作を開始すると、地図情報を自律走行型掃除機200から取得する(ステップS301)。ステップS301では、例えば、判定部122は、取得部110に自律走行型掃除機200と通信させることで、自律走行型掃除機200からフロアマップ420aを示す地図情報を取得部110に取得させる。
次に、判定部122は、取得したフロアマップ420aの外周を所定の長さごとに複数の位置に分割する(ステップS302)。所定の長さは、予め任意に定められてよい。本実施の形態では、所定の長さは、1[m]である。ステップS302では、判定部122は、フロアマップ420aの外周全体を1[m]の長さごとに分割する。
次に、判定部122は、分割したフロアマップ420aの外周の任意の位置での屈曲回数をカウントする(ステップS303)。
図12は、実施の形態3に係る掃除地図表示装置102(具体的には、判定部122)が直進率を算出する処理手順を説明するための図である。
判定部122は、例えば、自律走行型掃除機200が算出したフロアマップ420aの外周について、例えば、外周の時計回り又は反時計回りに屈曲角度[°](≦180[°])を屈曲するごとに取得し、屈曲角度が45[°]以上であれば屈曲回数を1[回]とカウントする。本実施の形態では、例えば、判定部122は、フロアマップ420aの外周を反時計回りに走査して、屈曲するごとに屈曲角度を算出する。
例えば、図12に示す区間では、90[°]の3つの屈曲角度があり、45[°]以上である90[°]が3つあるので、判定部121は、屈曲回数を3[回]とカウントする。
再び図11を参照し、次に、判定部122は、分割した外周の直進率を算出する(ステップS304)。ステップS304では、例えば、判定部122は、上記した式(1)を用いて直進率を算出する。
判定部122は、例えば、算出した直進率が25[%]より低い位置を判定する。この場合、25%が閾値情報162として記憶部152に記憶されている。
なお、判定部122が屈曲したとカウントする屈曲角度は、特に限定されない。判定部122が屈曲したとカウントする屈曲角度は、45[°]以上でもよいし、45[°]以下でもよい。
また、閾値情報162に含まれる数値は、25[%]に限定されるものではなく、25[%]以上でもよいし、25[%]以下でもよい。
また、判定部122は、所定の長さでは余りがでる等の理由により外周を等分割できない場合、屈曲回数を分割した長さで割る等して、所定の長さにあわせて直進率を補正してもよい。
次に、判定部122は、直進率の算出が、複数の位置それぞれおいて終了したか、つまり、外周全体について終了したか否かを判定する(ステップS305)。
判定部122は、直進率の算出が、外周全体について終了していない判定した場合(ステップS305でNo)、ステップS303に戻り、直進率を算出していない位置について直進率の算出を行う。
一方、判定部122が、直進率の算出が、外周全体について終了した判定した場合(ステップS305でYes)、取得部110は、軌跡情報及びごみ量情報を自律走行型掃除機200から取得する(ステップS306)。具体的には、ステップS306では、例えば、判定部122は、取得部110に自律走行型掃除機200と通信させることで、軌跡情報及びごみ量情報を自律走行型掃除機200から取得部110に取得させる。
次に、判定部122は、複数の位置それぞれについて、算出した直進率が所定の閾値より低いか否かを判定する(ステップS307)。
次に、制御部132は、判定部122により判定された位置を他の位置と表示態様を異ならせたフロアマップ420aと、軌跡画像421aと、ごみ量画像422とを、フロアマップ420aに軌跡画像421a及びごみ量画像422を重畳させて表示部140に表示させる(ステップS308)。
ステップS308では、制御部132は、例えば、フロアマップ420aで示される外周全体の線幅をまず決定する。さらに、制御部132は、フロアマップ420aの外周全体の線幅のうち、判定部122により判定された位置の線幅を、他の位置よりも太くなるように決定する。各位置の線幅は、任意に定められてよく、特に限定されない。例えば、制御部132は、ステップS308では外周全体の線幅を1[pixel]と決定し、判定部122に判定された位置の線幅を3[pixel]と決定する。さらに、制御部132は、決定した線幅のフロアマップ420aに軌跡画像421a及びごみ量画像422を重畳させて表示部140に表示させる。
なお、ステップS306は、ステップS301で実行されてもよい。この場合、ステップS305でYesの後には、ステップS307が実行される。
[効果等]
以上説明したように、実施の形態3に係る掃除地図表示装置102は、画像を表示する表示部140と、自律走行型掃除機200が走行して掃除する部屋400のフロアマップ420aの外周を所定の長さごとに複数の位置に分割し、複数の位置のそれぞれにおける屈曲回数をカウントし、カウントした屈曲回数に基づく直進率を算出し、算出した直進率が所定の閾値より低い位置を判定する判定部122と、判定部122により判定された位置を他の位置と表示態様を異ならせたフロアマップ420aと、自律走行型掃除機200が走行した移動軌跡を示す軌跡画像421aとを表示部140に表示させる制御部132と、を備える。
このような構成によれば、判定部122は、入り組んだ形状となっており視認性が悪いフロアマップ420aの位置を特定できる。そのため、制御部132は、フロアマップ420aの外周において見えにくい可能性が高くなる位置を強調して表示部140に表示させることができる。
また、実施の形態3に係る掃除地図表示方法は、自律走行型掃除機200が走行して掃除する部屋400のフロアマップ420aの外周を所定の長さごとに複数の位置に分割し、複数の位置のそれぞれにおける屈曲回数をカウントし、カウントした屈曲回数に基づく直進率を算出し、算出した直進率が所定の閾値より低い位置を判定する判定ステップと、判定ステップで判定した位置を他の位置と表示態様を異ならせたフロアマップ420aと、自律走行型掃除機200が走行した移動軌跡を示す軌跡画像421aとを表示部140に表示させる制御ステップと、を含む。
このような方法によれば、入り組んだ形状となっており視認性が悪いフロアマップ420aの位置を特定できる。そのため、フロアマップ420aの外周において見えにくい可能性が高くなる位置を強調して表示部140に表示させることができる。
(その他の実施の形態)
以上、本発明に係る掃除地図表示装置等について、上記各実施の形態に基づいて説明したが、本発明は、上記各実施の形態に限定されるものではない。
例えば、掃除地図表示装置は、自律走行型掃除機が生成した地図情報を取得してもよいし、外部の通信機器等から地図情報を取得してもよい。また、掃除地図表示装置は、外部の通信装置等と通信するための、通信アダプタ等の図示しない通信インターフェースを備えてもよい。
また、例えば、軌跡画像及びフロアマップの表示態様の分け方は、線幅によるものに限定されない。例えば、線の色で区別されていてもよいし、点線、破線等で区別されていてもよい。その他、線の透過率等が変更されてもよい。
また、例えば、上記実施の形態では、制御部は、軌跡画像全体又はフロアマップの外周全体の線幅を決定した後で、判定部が判定した位置の線幅を変えたがこれに限定されない。制御部は、軌跡画像全体又はフロアマップの外周全体の線幅を決定した後で、判定部が判定した位置以外の線幅を変えてもよい。このように、制御部は、判定部が判定した位置が結果的に他の位置とは異なるように表示態様を変更させればよい。つまり、制御部は、判定部が算出した各位置における直進率に基づいて、各位置での線幅を決定すればよい。
また、例えば、制御部は、直進率に応じて、例えば、フロアマップの外周の線幅を1[pixel]と3[pixel]と5[pixel]とにする等、表示態様を3以上変更してもよい。
また、例えば、軌跡画像以外にごみ量画像等をフロアマップに重畳表示させる場合、制御部は、ごみ量画像が重畳される位置の軌跡画像の表示態様を変更してもよい。
また、例えば、上記実施の形態では、判定部は、直進率が所定の閾値より低いか否かを判定した。例えば、判定部は、直進率が所定の閾値より高いか否かを判定してもよく、制御部は、直進率に基づいて行われた判定部による判定結果に基づいて、表示部に表示される画像の表示態様を変更すればよい。
また、例えば、上記実施の形態では、掃除地図表示装置等が備える判定部、制御部等の処理部の各構成要素、及び、自律走行型掃除機が備える処理部は、それぞれCPUと制御プログラムとによって実現されると説明した。例えば、それぞれの当該処理部の構成要素は、それぞれ1つ又は複数の電子回路で構成されてもよい。1つ又は複数の電子回路は、それぞれ、汎用的な回路でもよいし、専用の回路でもよい。1つ又は複数の電子回路には、例えば、半導体装置、IC(Integrated Circuit)、又は、LSI(Large Scale Integration)等が含まれてもよい。IC又はLSIは、1つのチップに集積されてもよく、複数のチップに集積されてもよい。ここでは、IC又はLSIと呼んでいるが、集積の度合いによって呼び方が変わり、システムLSI、VLSI(Very Large Scale Integration)、又は、ULSI(Ultra Large Scale Integration)と呼ばれるかもしれない。また、LSIの製造後にプログラムされるFPGA(Field Programmable Gate Array)も同じ目的で使うことができる。
また、本発明の全般的又は具体的な態様は、システム、装置、方法、集積回路又はコンピュータプログラムで実現されてもよい。或いは、当該コンピュータプログラムが記憶された光学ディスク、HDD(Hard Disk Drive)若しくは半導体メモリ等のコンピュータ読み取り可能な非一時的記録媒体で実現されてもよい。また、システム、装置、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。
その他、各実施の形態に対して当業者が思いつく各種変形を施して得られる形態や、本発明の趣旨を逸脱しない範囲で実施の形態における構成要素及び機能を任意に組み合わせることで実現される形態も本発明に含まれる。
例えば、掃除地図表示装置は、軌跡画像及びフロアマップのいずれにおいても一部を他部とは異なる表示態様となるように表示してもよい。